A Complex Network Theory-Based Modeling Framework for Unmanned Aerial Vehicle Swarms


Abstract
1. Introduction
2. UAV Swarming System
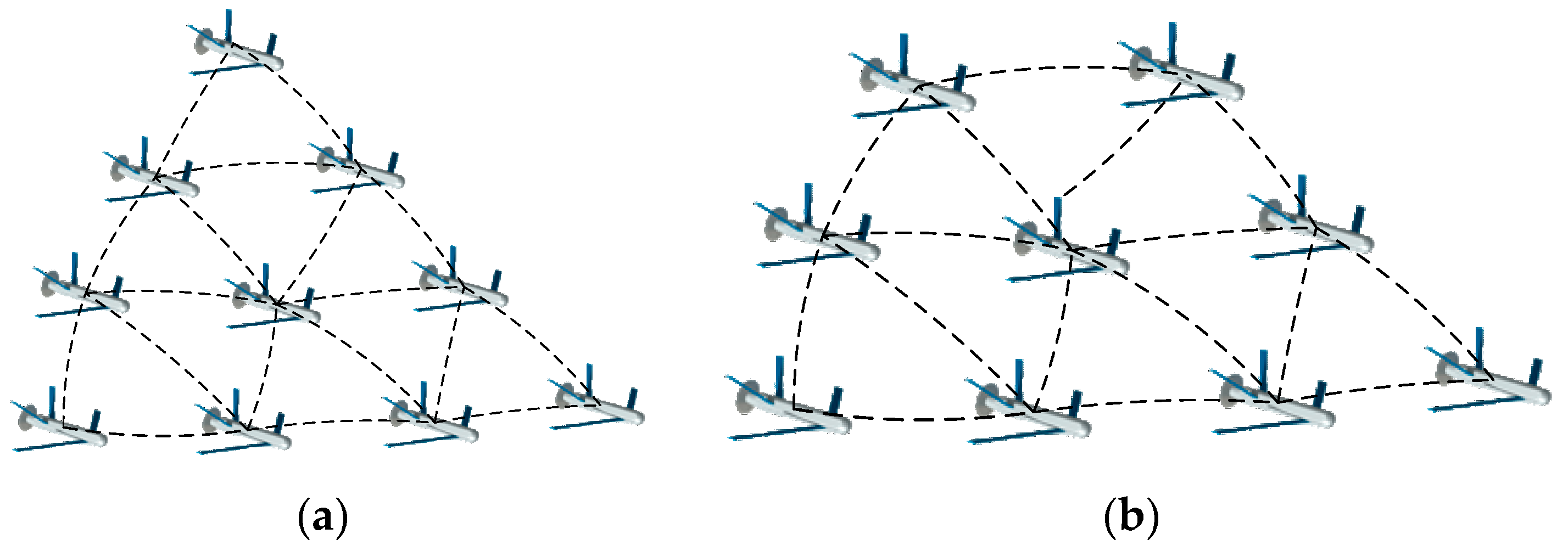
2.1. System Description
- (a)
- Vehicle: The swarming formation consists of vehicles (individual UAVs). Based on the report “Sustaining America’s Precision Strike Advantage” issued by the U.S. Center for Strategic and Budgetary Assessment (CSBA) in 2015, small UAVs will be the main formation vehicle used to consume enemy weapons [31]. Thus, current research has focused on small and low-cost UAVs, such as the DARPA “elf” UAV, the “Coyote” UAV of the LOCUST project, and the “Partridge” UAVs of the U.S. Navy [32,33]. These vehicles are better for swarming owing to their small size, low cost, and test repeatability, among other attributes.
- (b)
- Payload: Payload refers to equipment and sensors related to UAV missions. Sensors, radars, camera equipment, and weapons are the most common payloads [34]. In a typical UAV swarming system, the individual UAV limits the variety of payloads it can carry for technical reasons, especially for small UAVs; thus, the payloads are generally integrated with the aircraft [33,35]. As a result, a UAV swarming system may contain UAVs with different payloads when performing missions. For example, for cooperative detection, the system may be equipped with heterogeneous sensors.
- (c)
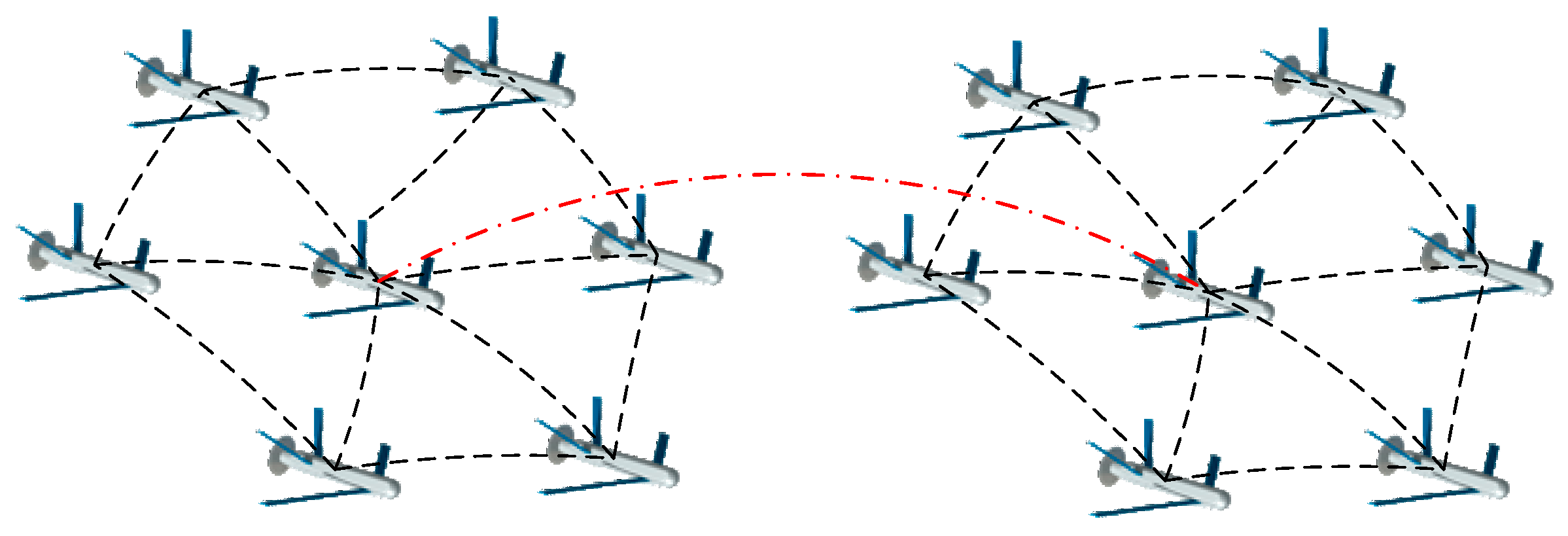
- Datalink: The communication datalink is the basis for the realization of UAV swarm control and the successful implementation of missions. Two kinds of datalinks are commonly used: a traditional datalink and a UAV ad hoc network [36]. The traditional datalink can be further divided into “ground station to UAV” and “ground station to satellite to UAV” links [37]. A communication ad hoc network is the network formed by multiple UAVs. It will be the main communication mode in the future or the next generation of communication datalinks. At present, three kinds of communication ad hoc networks (mobile ad hoc networks, wireless sensor networks, and wireless mesh networks) can be utilized in a UAV swarm owing to their mobility and network topology dynamics, multiple-hop transmission, and self-organization [37,38,39]. Moreover, these networks are rather robust, so that a single-node failure in the network has no effect on the performance of the entire network.
2.2. Scope Identification
3. Modeling Framework
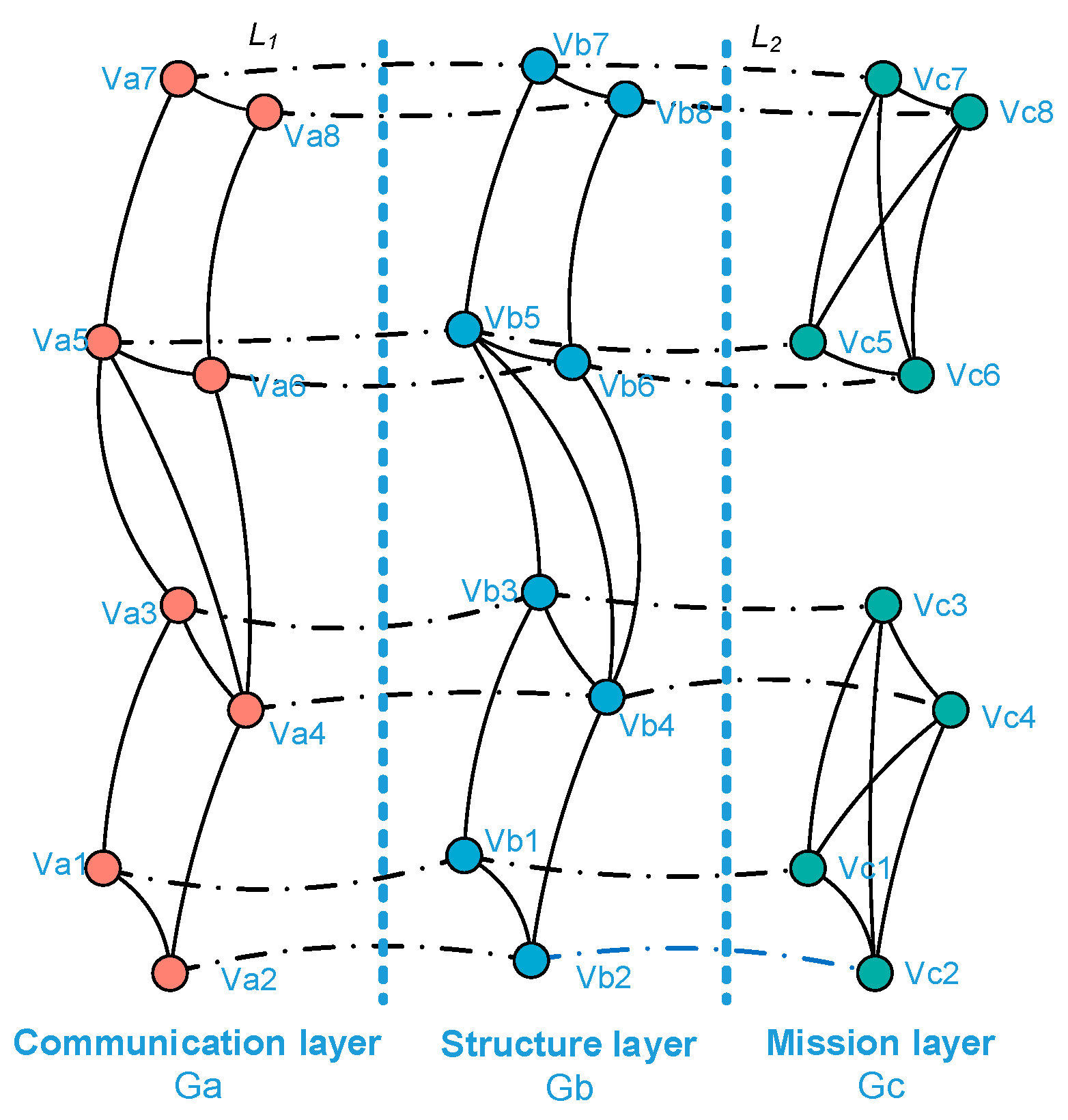
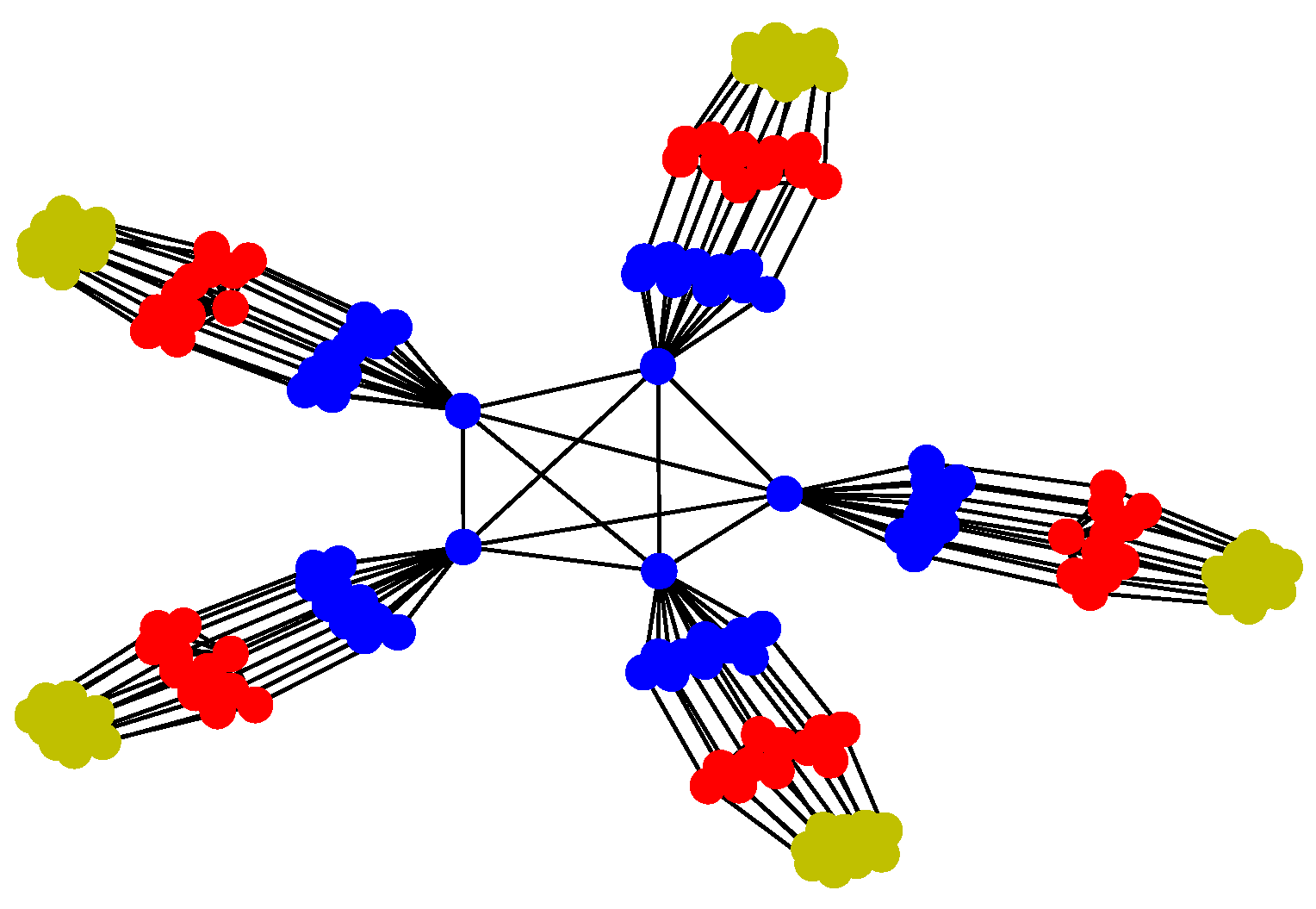
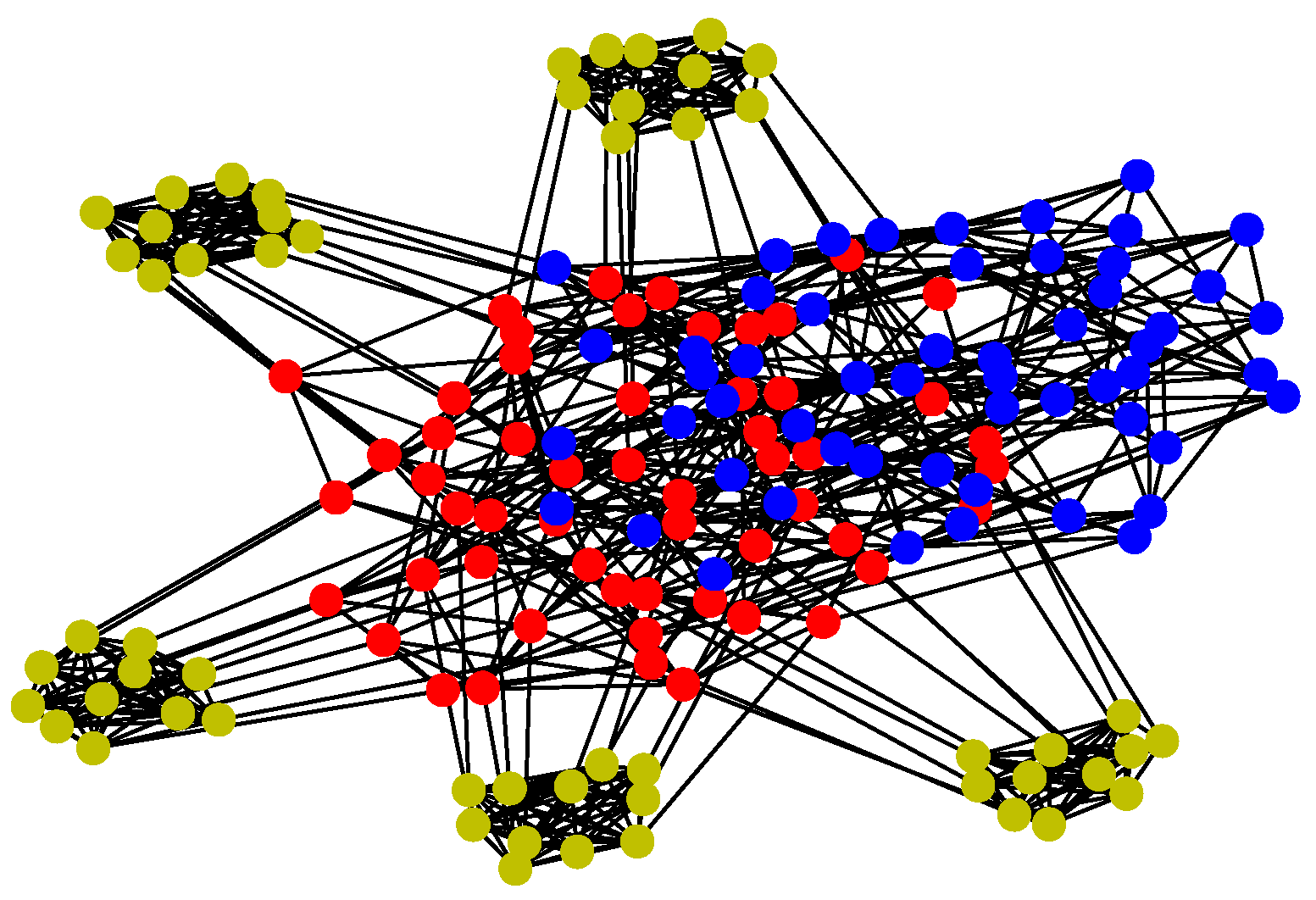
3.1. Network Representation Based on Complex Network
3.2. Modeling Algorithm
- Initialization: Generate n nodes and define the number of payload types, m; the number of nodes under each payload, ni (i = 1,2, …, m); and the number of hierarchy levels, p.
- Connection:
- (a)
- Adds edges between nodes and adjacent nodes in the communication layer and structural layer according to topology;
- (b)
- Adds edges between every two nodes among ni nodes;
- (c)
- Adds edges one-to-one between the communication layer and structure layer and between the structure layer and the mission layer separately;
- (d)
- Multiple edges and self-loops should not exist.
- Weight: Randomly assign a weight to the edges in the communication layer and structure layer based on mission requirements. The weight of edges in the mission layer should assign the same value.
- Output: After all of the nodes, edges, and weights are generated, output the network.
- Initialization: Generate n nodes and define the number of payload types, m, and the number of nodes under each payload, ni (i = 1,2, …, m).
- Connection:
- (a)
- Adds edges between leader nodes and follower nodes in the communication layer and structural layer;
- (b)
- Adds edges between every follower node and its adjacent nodes;
- (c)
- Adds edges between every two nodes among ni nodes;
- (d)
- Adds edges one-to-one between the communication layer and structure layer and between the structure layer and the mission layer separately;
- (e)
- Multiple edges and self-loops should not exist.
- Weight: Randomly assign a weight to the edges in the communication layer and structure layer based on mission requirements. The weight of edges in the mission layer should be assigned the same value.
- Output: After all the nodes, edges, and weights are generated, output the network.
- Initialization: Generate n nodes and define the number of payload types, m, and the number of nodes under each payload, ni (i = 1, 2, …, m).
- Connection:
- (a)
- Adds edges among nodes and random [k − 1,k + 1] nodes in the communication layer and the structural layer;
- (b)
- Adds edges between every two nodes among ni nodes;
- (c)
- Adds edges one-to-one between the communication layer and the structure layer and between the structure layer and the mission layer separately;
- (d)
- Multiple edges and self-loop should not exist.
- Weight: Randomly assign a weight to the edges in the communication layer and the structure layer based on mission requirements. The weight of edges in the mission layer should be assigned the same value.
- Output: After all of the nodes, edges, and weights are generated, output the network.
3.3. Network Measurements
4. Case Study Analysis and Discussion
4.1. Case Study
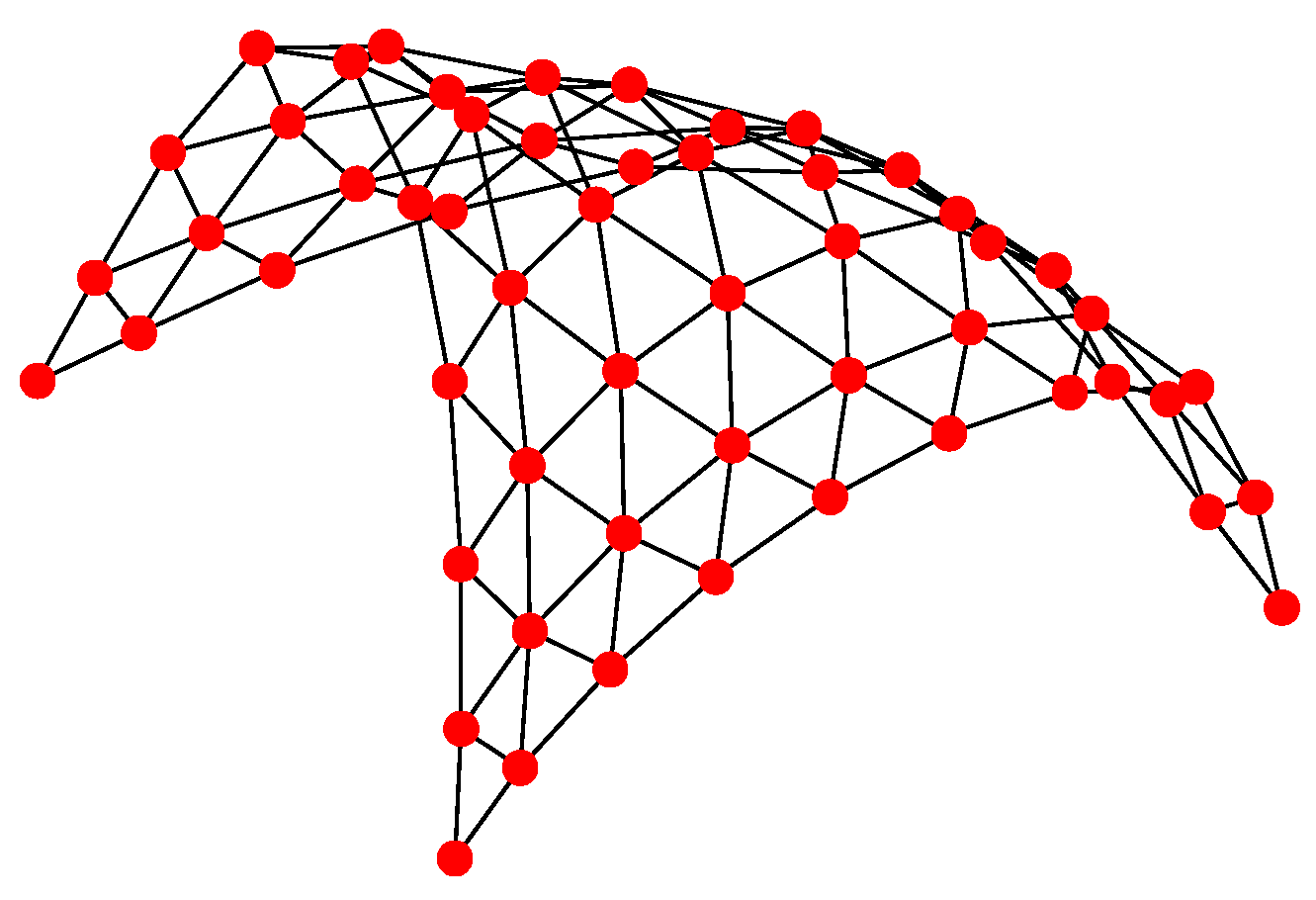
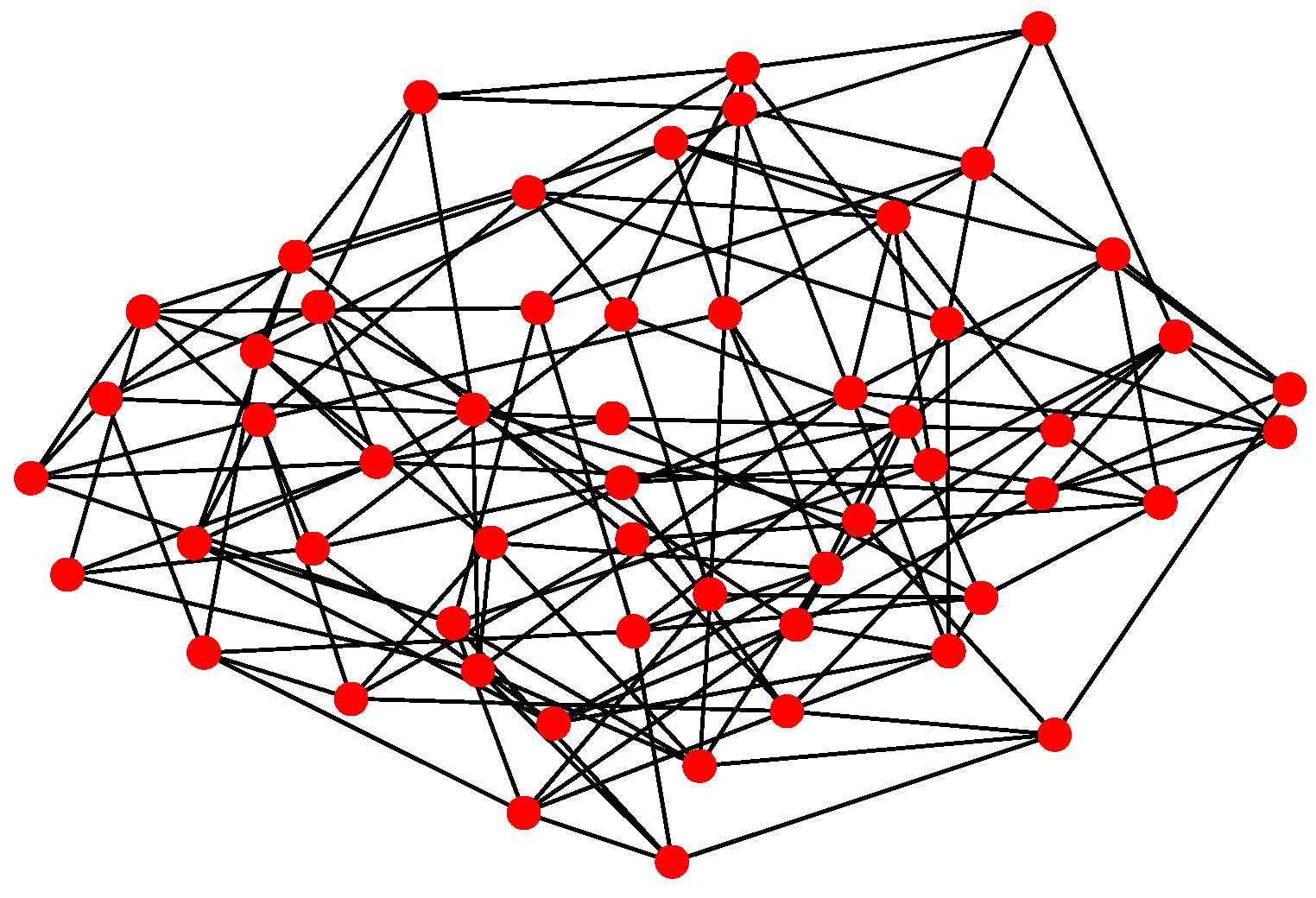
4.2. Topology Analysis and Discussion
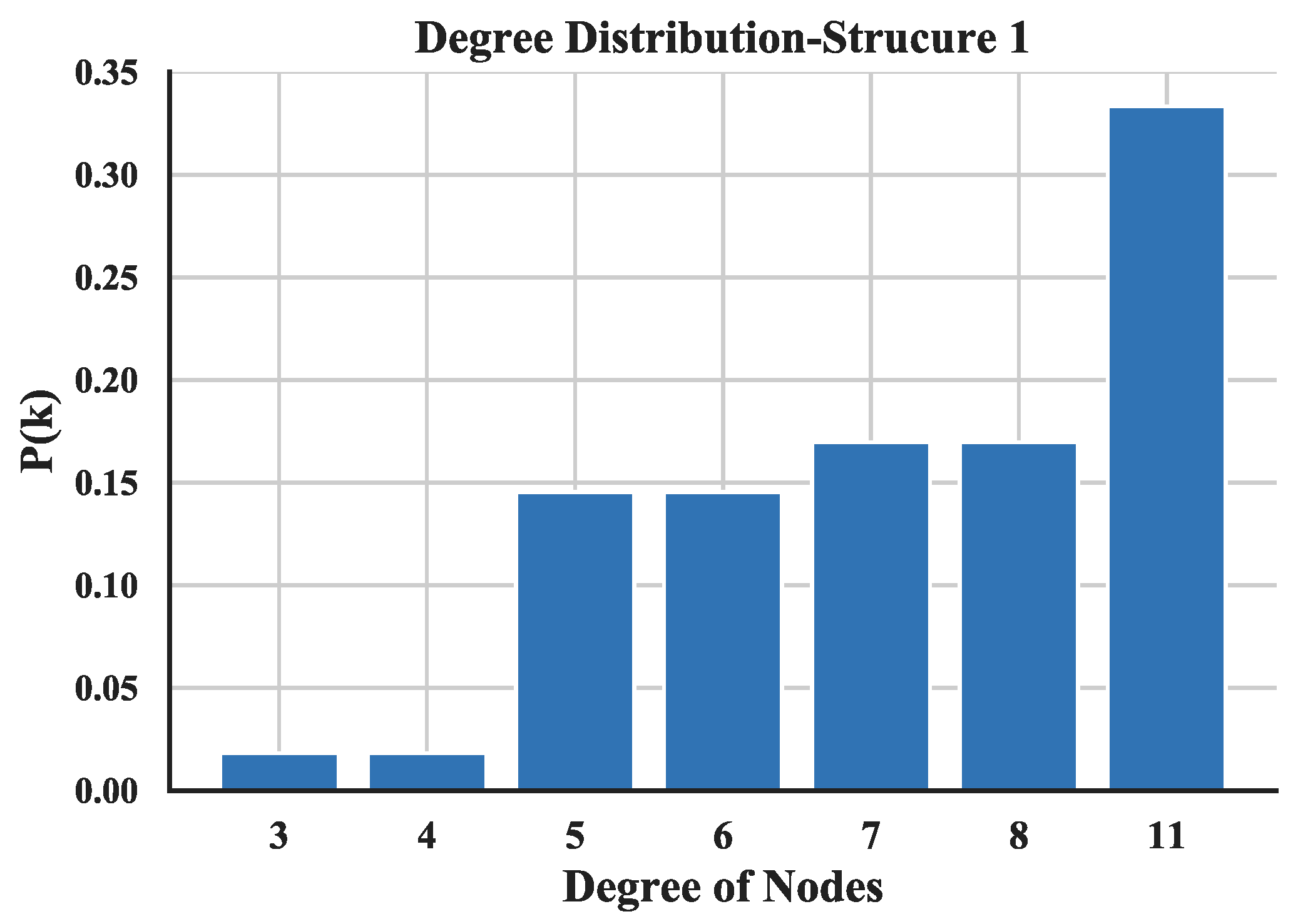
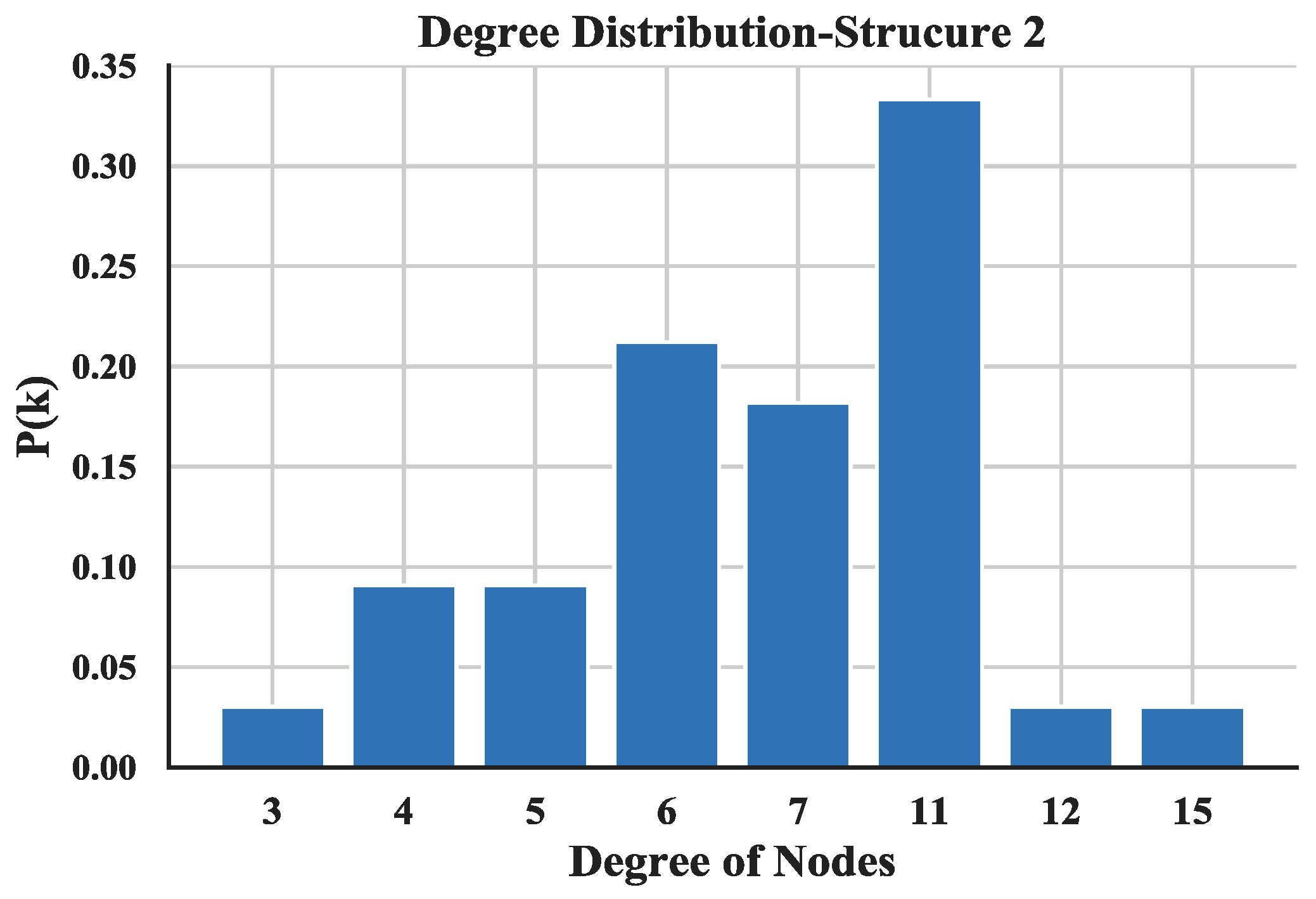
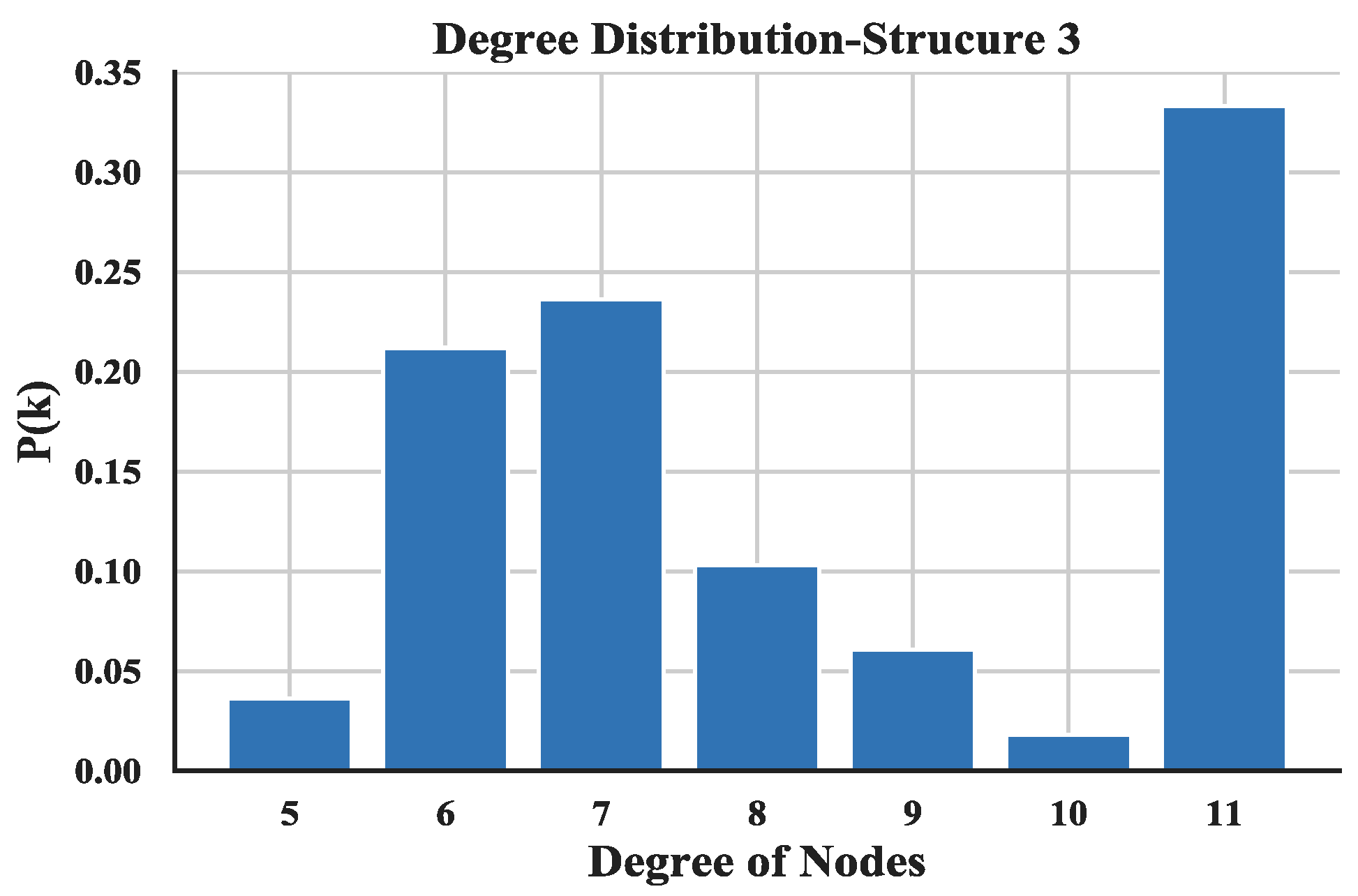
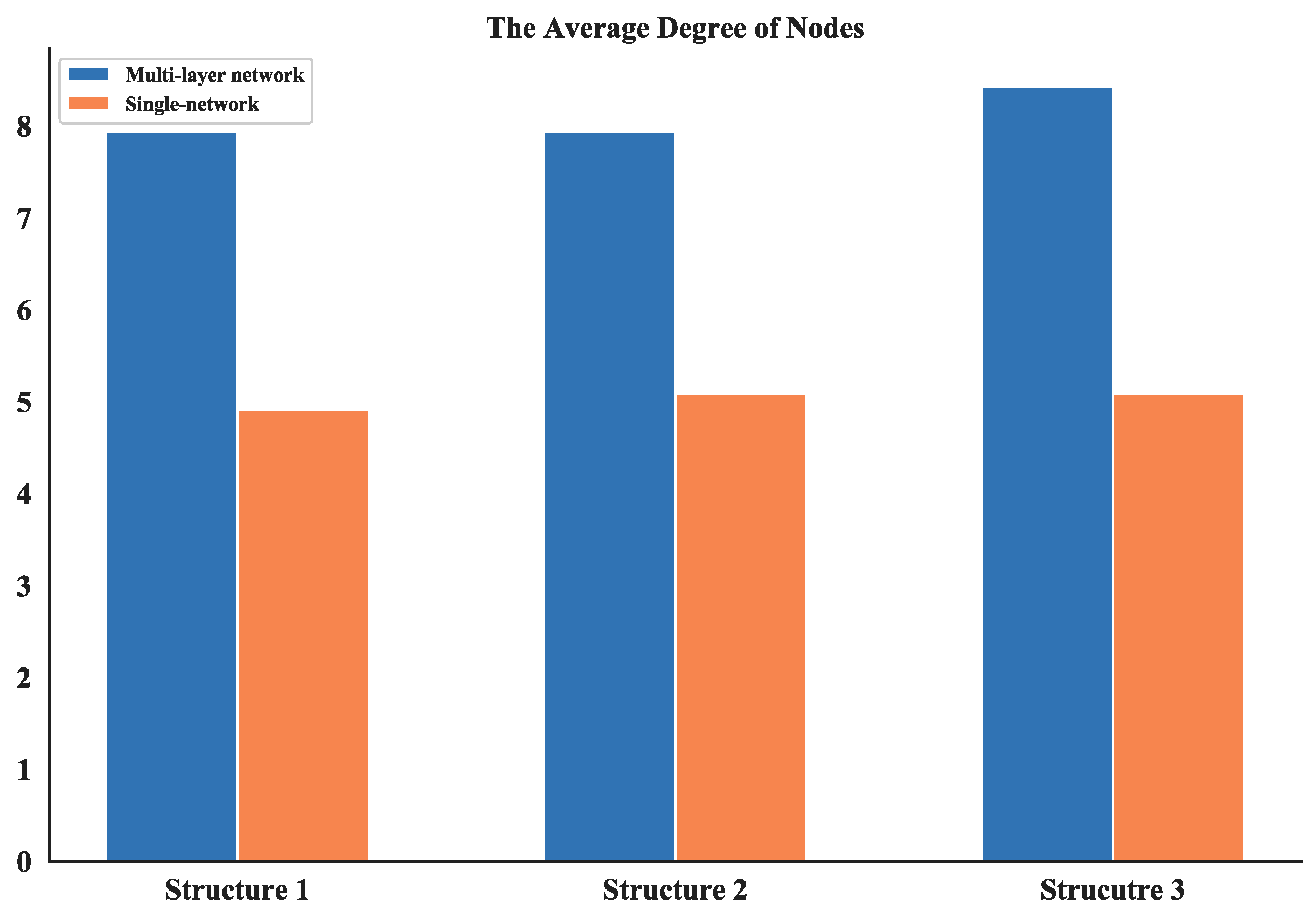
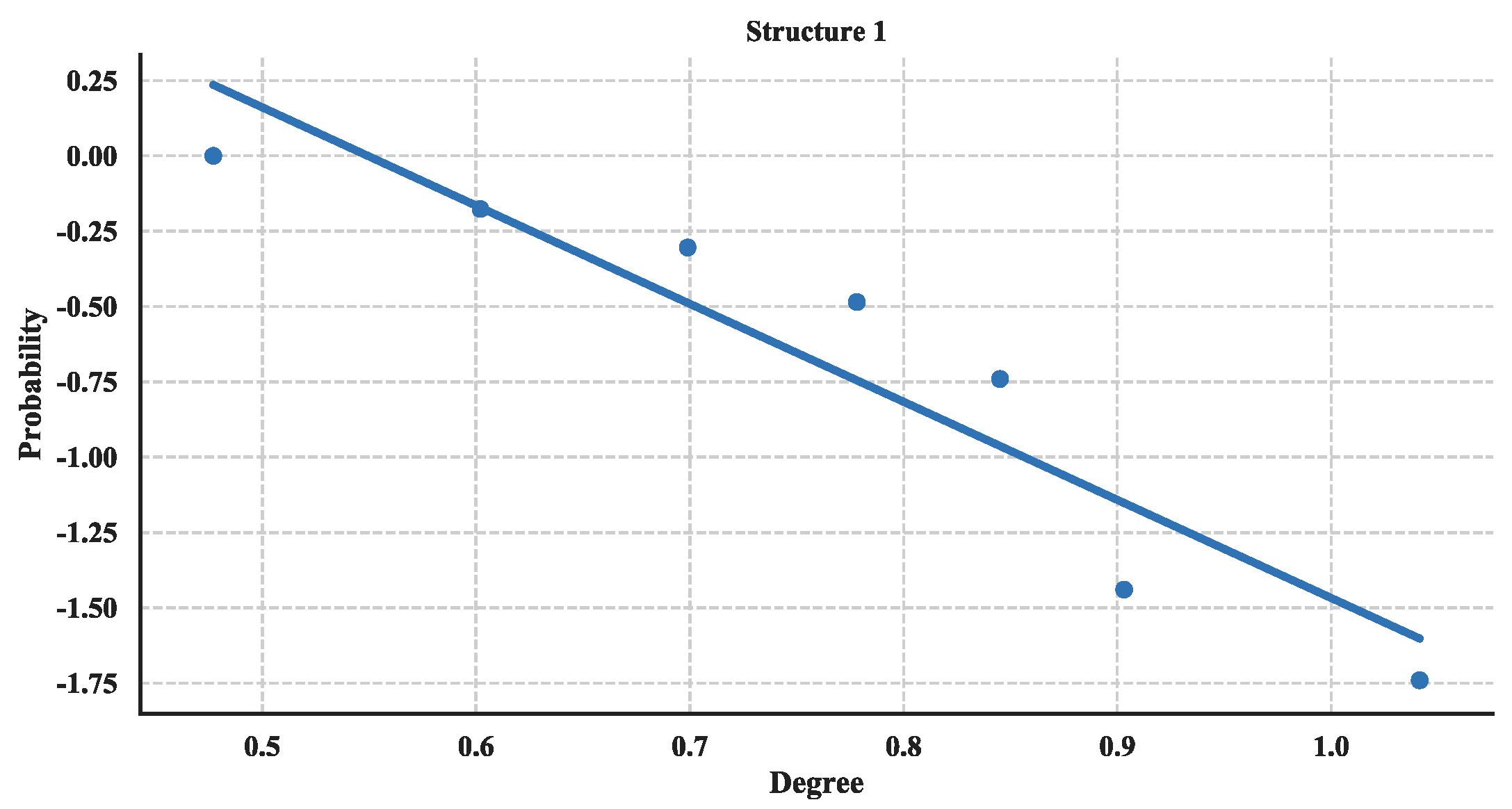
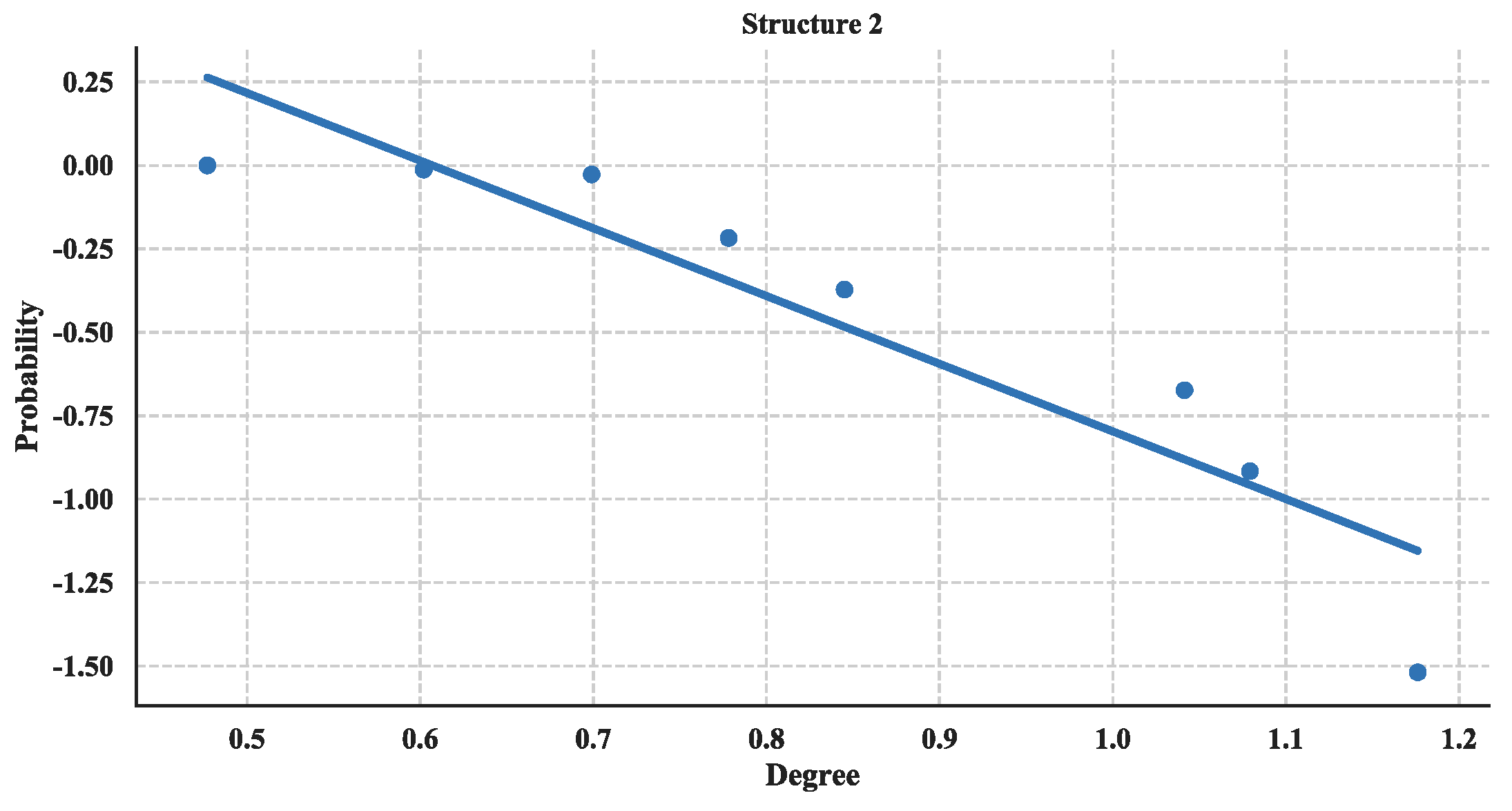
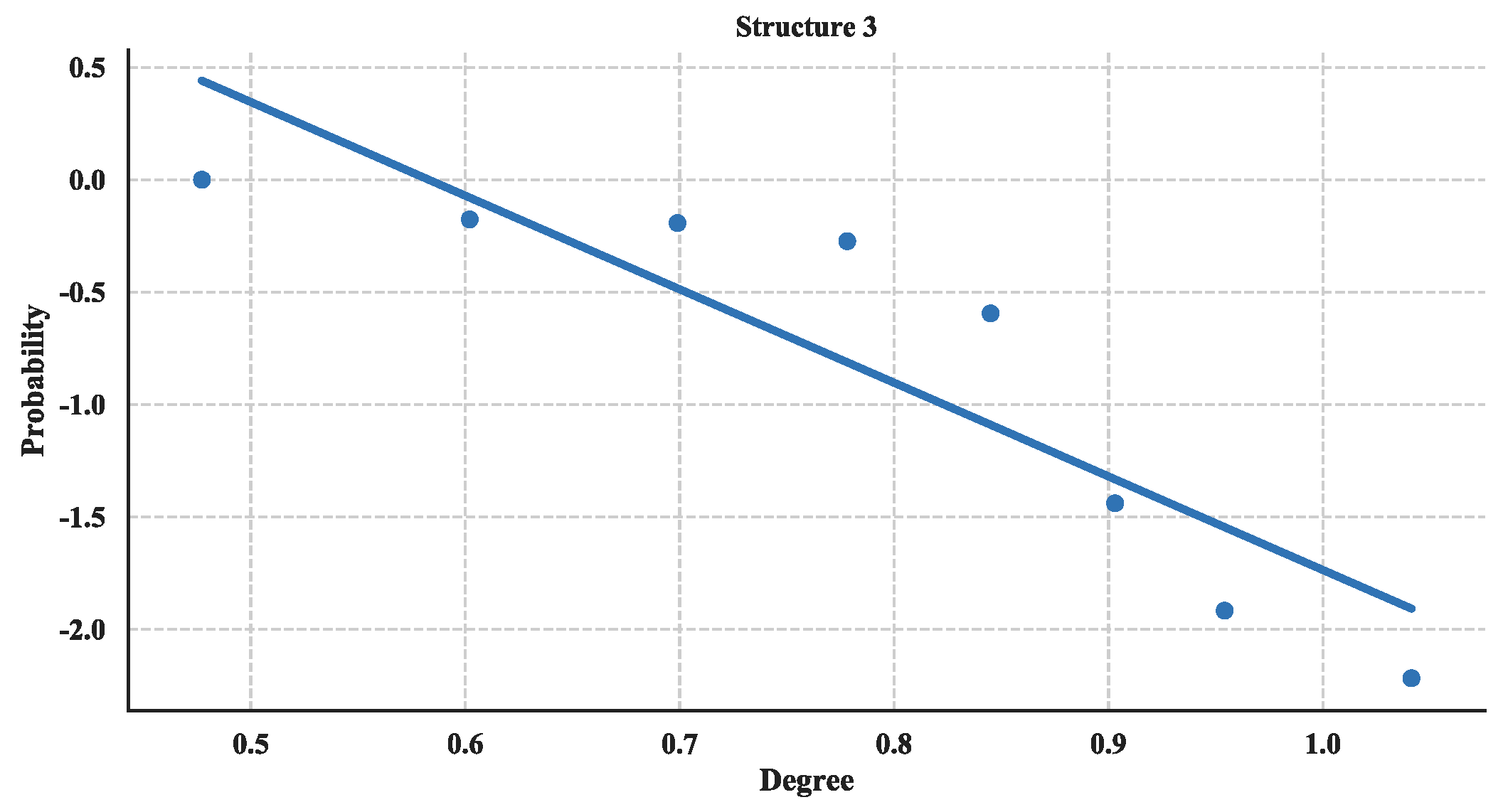
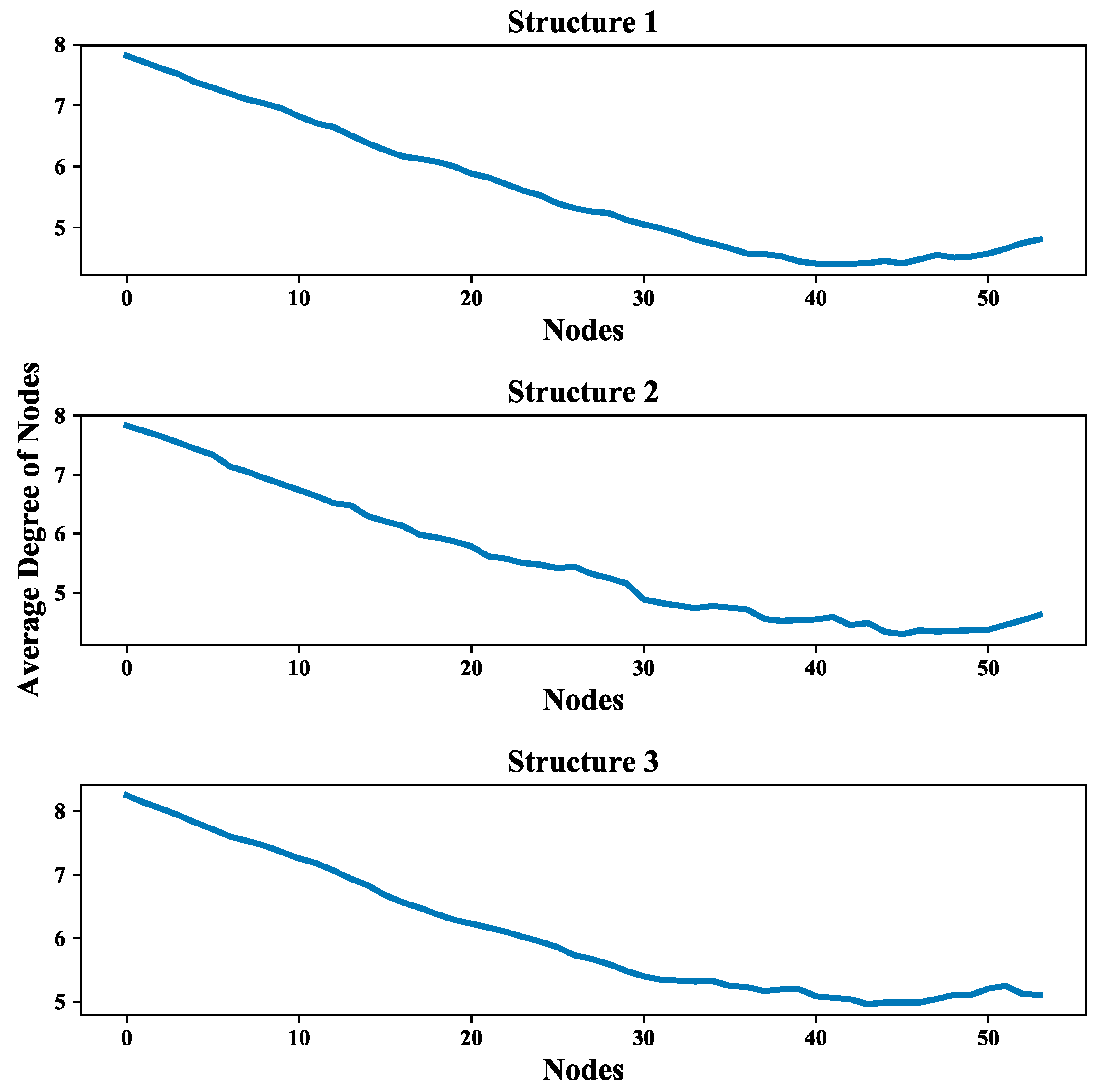
4.2.1. Analysis of Degree and Degree Distribution of Nodes
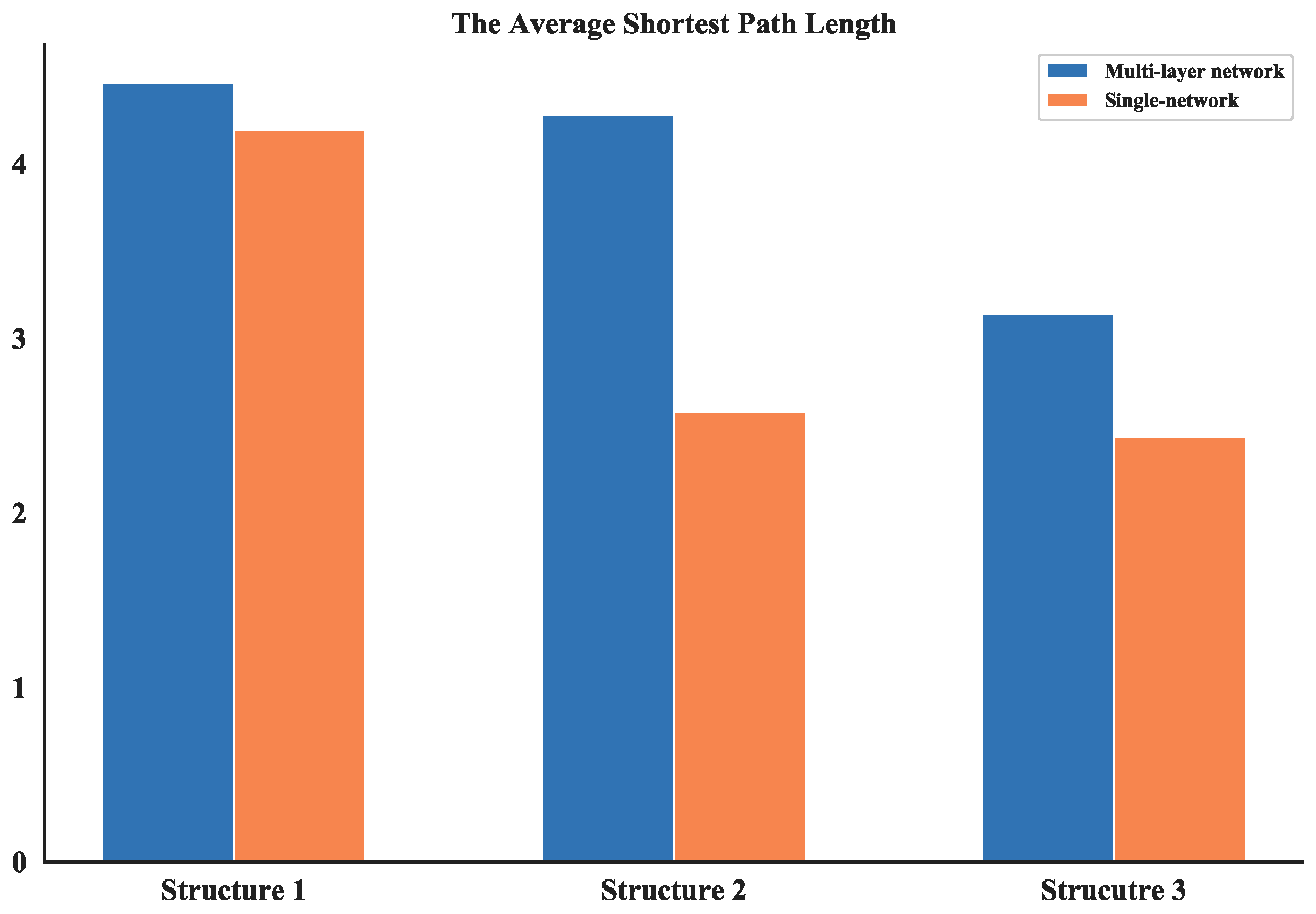
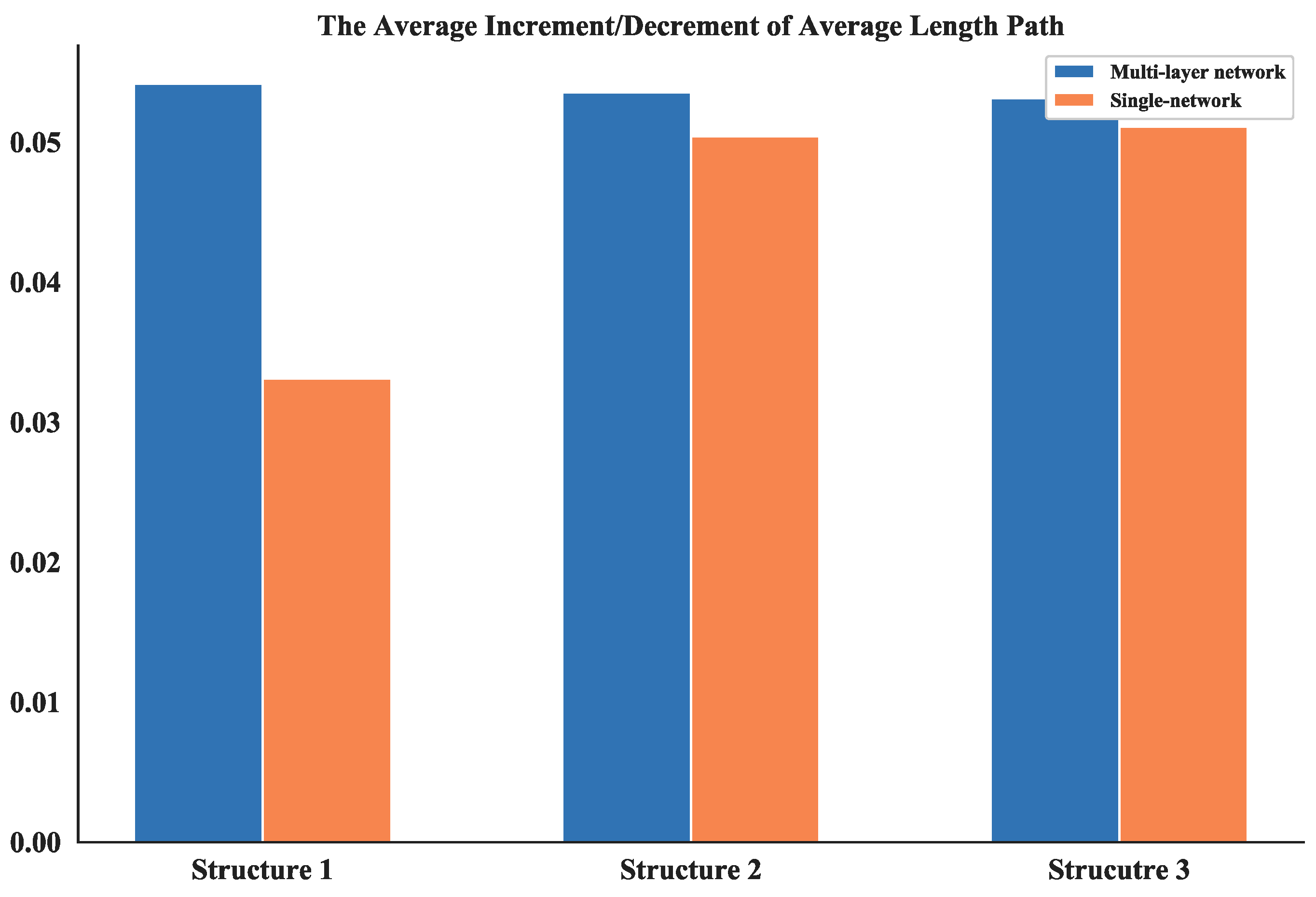
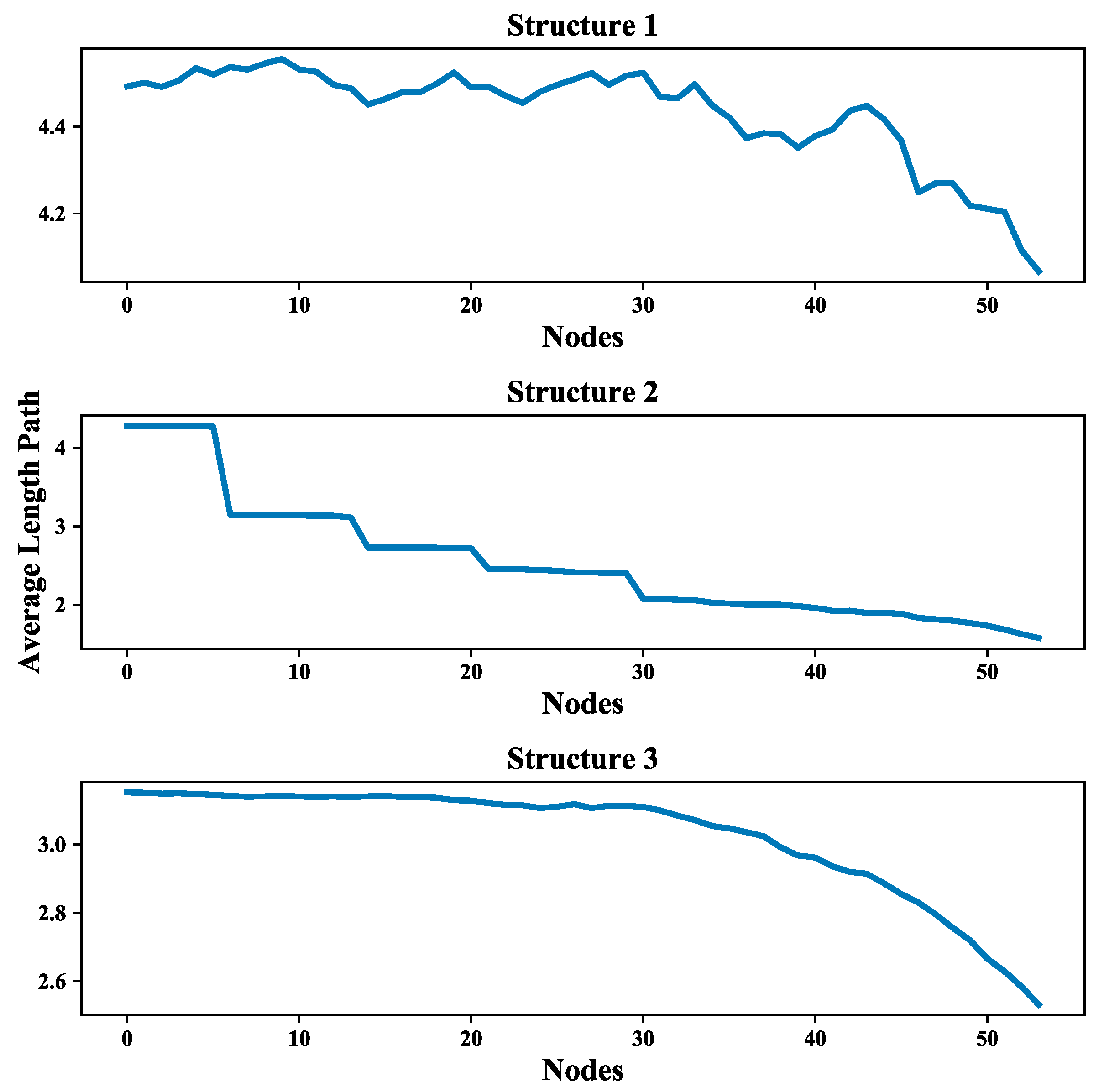
4.2.2. Analysis of Average Shortest Path Length
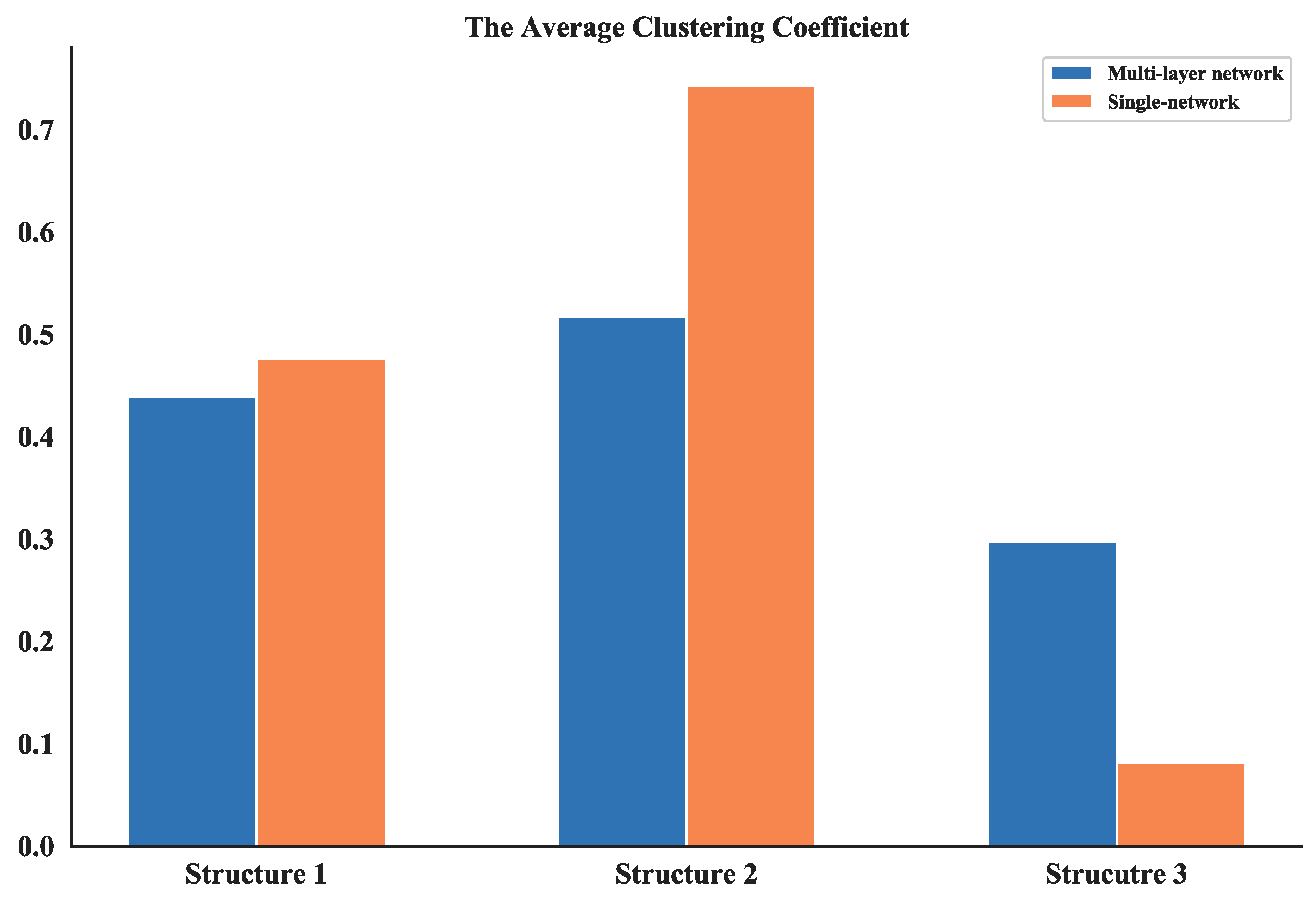
4.2.3. Analysis of Clustering Coefficient
4.2.4. Analysis of Small-World Characteristics
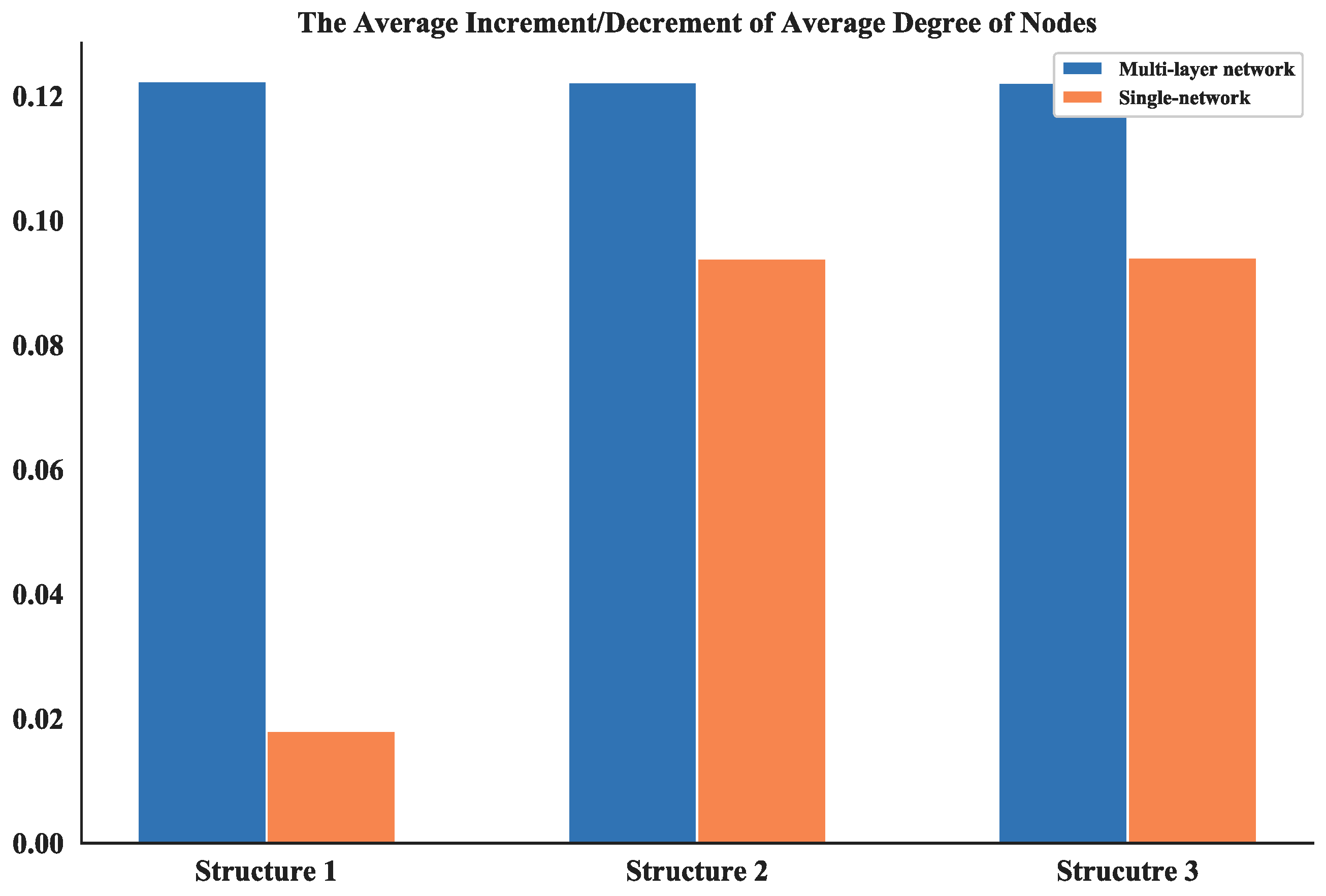
4.2.5. Dynamic Topology Analysis
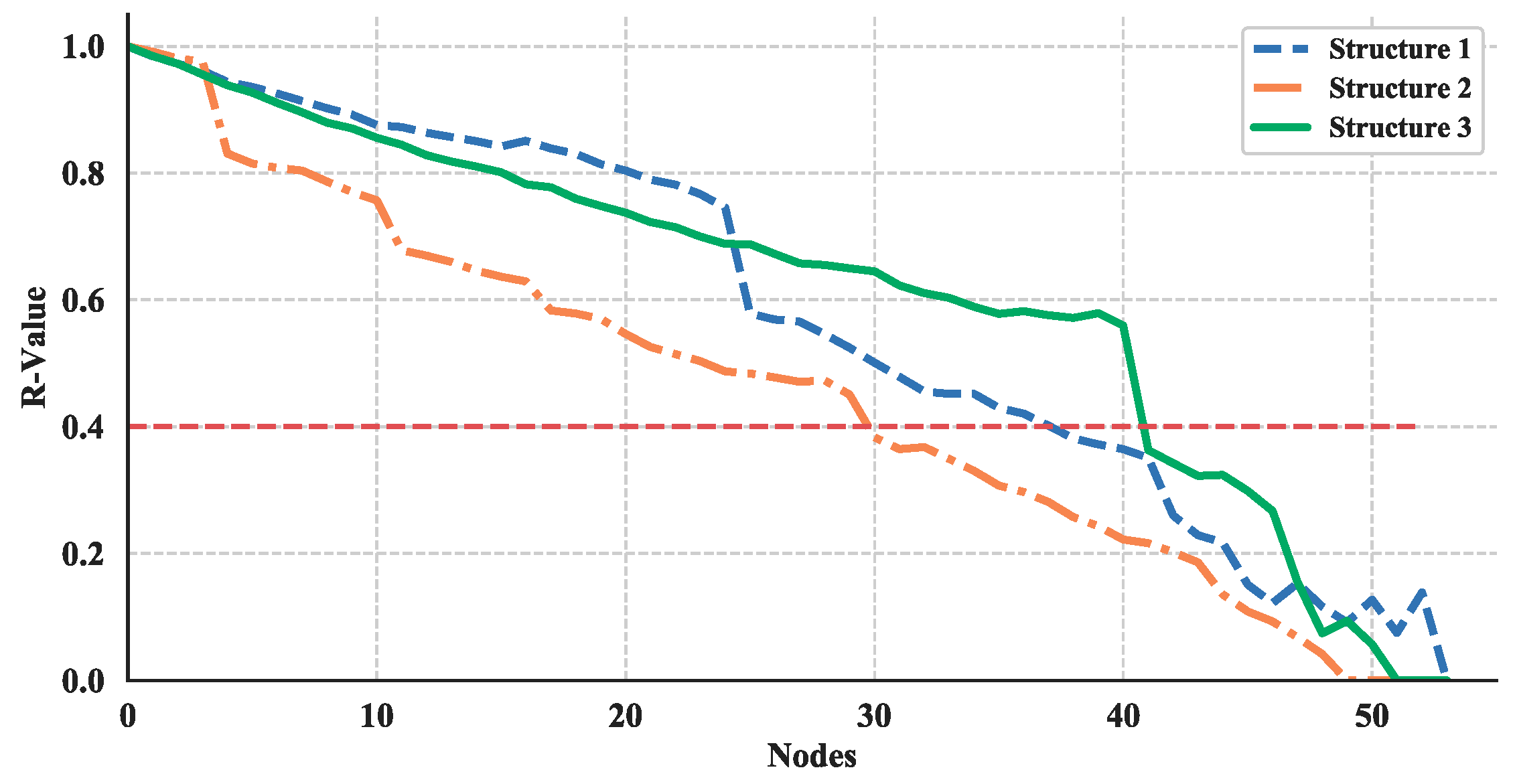
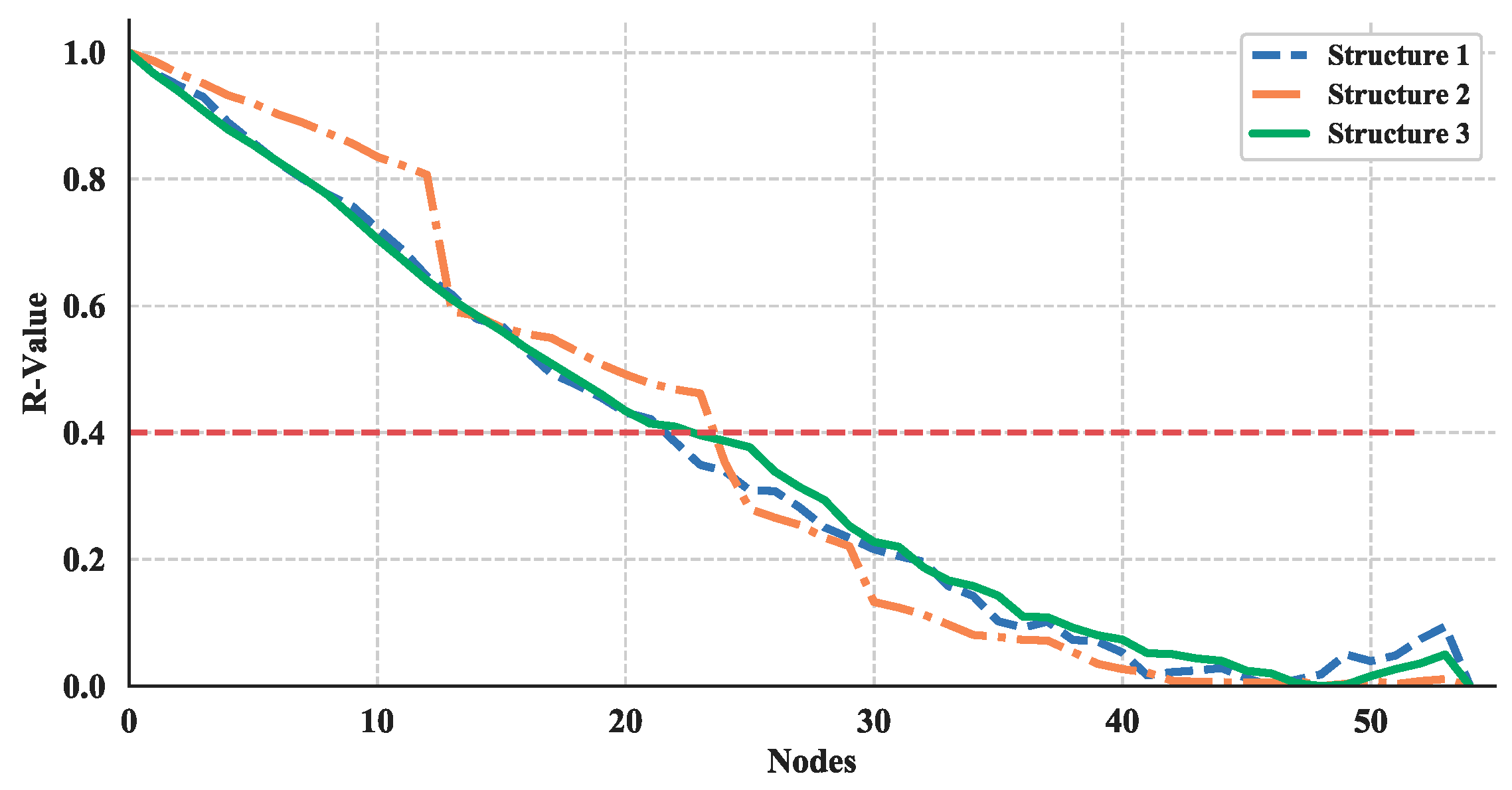
4.3. Robustness Evaluation
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Qiu, H.; Duan, H. Multiple UAV distributed close formation control based on in-flight leadership hierarchies of pigeon flocks. Aerosp. Sci. Technol. 2017, 70, 471–486. [Google Scholar] [CrossRef]
- Aznar, F.; Pujol, M.; Rizo, R.; Rizo, C. Modelling multi-rotor UAVs swarm deployment using virtual pheromones. PLoS ONE 2018, 13, e0190692. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Tao, X.; Member, S.; Zhang, N. Cooperative UAV Cluster Assisted Terrestrial Cellular Networks for Ubiquitous Coverage. IEEE J. Sel. Areas Commun. 2018. [Google Scholar] [CrossRef]
- Yang, B.; Liu, M.; Li, Z. Rendezvous on the Fly: Efficient Neighbor Discovery for Autonomous UAVs. IEEE J. Sel. Areas Commun. 2018. [Google Scholar] [CrossRef]
- Brasil, M.A.B.; Bosch, B.; Wagner, F.R.; De Freitas, E.P. Performance Comparison of Multi-Agent Middleware Platforms for Wireless Sensor Networks. IEEE Sens. J. 2018, 18, 3039–3049. [Google Scholar] [CrossRef]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-Assisted Heterogeneous Networks for Capacity Enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Orfanus, D.; De Freitas, E.P.; Eliassen, F. Self-Organization as a Supporting Paradigm for Military UAV Relay Networks. IEEE Commun. Lett. 2016, 20, 804–807. [Google Scholar] [CrossRef]
- Id, M.B.; Zacarias, I.; Tussi Leite, C.E.; Wang, H.; Pignaton de Freitas, E. A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones 2018, 2, 26. [Google Scholar] [CrossRef]
- Tarapore, D.; Christensen, A.L.; Timmis, J. Generic, scalable and decentralized fault detection for robot swarms. PLoS ONE 2017, 12, e0182058. [Google Scholar] [CrossRef] [PubMed]
- Weng, L.; Liu, Q.; Xia, M.; Song, Y.D. Immune network-based swarm intelligence and its application to unmanned aerial vehicle (UAV) swarm coordination. Neurocomputing 2014, 125, 134–141. [Google Scholar] [CrossRef]
- Fonoberova, M.; Fonoberov, V.A.; Mezić, I. Global sensitivity/uncertainty analysis for agent-based models. Reliab. Eng. Syst. Saf. 2013, 118, 8–17. [Google Scholar] [CrossRef]
- Niazi, M.; Hussain, A. Agent-based computing from multi-agent systems to agent-based models: A visual survey. Scientometrics 2011, 89, 479–499. [Google Scholar] [CrossRef]
- Bompard, E.; Napoli, R.; Xue, F. Assessment of information impacts in power system security against malicious attacks in a general framework. Reliab. Eng. Syst. Saf. 2009, 94, 1087–1094. [Google Scholar] [CrossRef]
- Kaegi, M.; Mock, R.; Kröger, W. Analyzing maintenance strategies by agent-based simulations: A feasibility study. Reliab. Eng. Syst. Saf. 2009, 94, 1416–1421. [Google Scholar] [CrossRef]
- Wang, R.; Zheng, W.; Liang, C.; Tang, T. An integrated hazard identification method based on the hierarchical Colored Petri Net. Saf. Sci. 2016, 88, 166–179. [Google Scholar] [CrossRef]
- Chen, H.; Zhou, C.; Qin, Y.; Vandenberg, A.; Vasilakos, A.V.; Xiong, N. Petri net modeling of the reconfigurable protocol stack for cloud computing control systems. In Proceedings of the 2010 IEEE Second International Conference on Cloud Computing Technology and Science, Indianapolis, IN, USA, 30 November–3 December 2010; pp. 393–400. [Google Scholar] [CrossRef]
- Li, C.; Ren, J.; Wang, H. A system dynamics simulation model of chemical supply chain transportation risk management systems. Comput. Chem. Eng. 2016, 89, 71–83. [Google Scholar] [CrossRef]
- Mirchi, A.; Madani, K.; Watkins, D.; Ahmad, S. Synthesis of System Dynamics Tools for Holistic Conceptualization of Water Resources Problems. Water Resour. Manag. 2012, 26, 2421–2442. [Google Scholar] [CrossRef]
- Walters, J.P.; Archer, D.W.; Sassenrath, G.F.; Hendrickson, J.R.; Hanson, J.D.; Halloran, J.M.; Vadas, P.; Alarcon, V.J. Exploring agricultural production systems and their fundamental components with system dynamics modelling. Ecol. Model. 2016, 333, 51–65. [Google Scholar] [CrossRef]
- Del Genio, C.I.; Gómez-Gardeñes, J.; Bonamassa, I.; Boccaletti, S. Synchronization in networks with multiple interaction layers. Sci. Adv. 2016, 2, e1601679. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Wickramarathne, T.L.; Chawla, N.V. Representing higher-order dependencies in networks. Sci. Adv. 2016, 2, e1600028. [Google Scholar] [CrossRef] [PubMed]
- Cuadra, L.; Salcedo-Sanz, S.; Del Ser, J.; Jiménez-Fernández, S.; Geem, Z.W. A critical review of robustness in power grids using complex networks concepts. Energies 2015, 8, 9211–9265. [Google Scholar] [CrossRef]
- Thacker, S.; Pant, R.; Hall, J.W. System-of-systems formulation and disruption analysis for multi-scale critical national infrastructures. Reliab. Eng. Syst. Saf. 2017, 167, 30–41. [Google Scholar] [CrossRef]
- Hossain, M.M.; Alam, S. A complex network approach towards modeling and analysis of the Australian Airport Network. J. Air Transp. Manag. 2017, 60, 1–9. [Google Scholar] [CrossRef]
- Li, Y.; Tao, F.; Cheng, Y.; Zhang, X.; Nee, A.Y.C. Complex networks in advanced manufacturing systems. J. Manuf. Syst. 2017, 43, 409–421. [Google Scholar] [CrossRef]
- Tien, I.; Der Kiureghian, A. Algorithms for Bayesian network modeling and reliability assessment of infrastructure systems. Reliab. Eng. Syst. Saf. 2016, 156, 134–147. [Google Scholar] [CrossRef]
- Wang, J. Mitigation of cascading failures on complex networks. Nonlinear Dyn. 2012, 70, 1959–1967. [Google Scholar] [CrossRef]
- Ouyang, M. Review on modeling and simulation of interdependent critical infrastructure systems. Reliab. Eng. Syst. Saf. 2014, 121, 43–60. [Google Scholar] [CrossRef]
- Heracleous, C.; Kolios, P.; Panayiotou, C.G.; Ellinas, G.; Polycarpou, M.M. Hybrid systems modeling for critical infrastructures interdependency analysis. Reliab. Eng. Syst. Saf. 2017, 165, 89–101. [Google Scholar] [CrossRef]
- Beard, R.; Rabbath, A.C. Networked UAVs and UAV Swarms. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1983–2019. ISBN 9789048197071. [Google Scholar]
- Gunzinger, M.; Clark, B. Sustaining America’s Precision Strike Advantage; Center for Strategic and Budgetary Assessments: Washington, DC, USA, 2015; Available online: https: //csbaonline.org/research/publications/ sustaining-americas-precision-strike-advantage (accessed on 15 August 2018).
- Lachow, I. The upside and downside of swarming drones. Bull. At. Sci. 2017, 73, 96–101. [Google Scholar] [CrossRef]
- Qiu, H.X.; Wei, C.; Dou, R.; Zhou, Z.W. Fully autonomous flying: From collective motion in bird flocks to unmanned aerial vehicle autonomous swarms. Sci. China Inf. Sci. 2015, 58, 10–12. [Google Scholar] [CrossRef]
- Fahlstrom, P.G.; Gleason, T.J. Classes and Missions of UAVs. In Introduction to UAV Systems, Fourth Edition; Fahlstrom, P.G., Gleason, T.J., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 17–31. ISBN 9781119978664. [Google Scholar]
- Maza, I.; Ollero, A.; Casado, E.; Scarlatti, D. Classification of multi-UAV Architectures. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 935–975. ISBN 9789048197071. [Google Scholar]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R. A Cooperative Network Framework for Multi-UAV Guided Ground Ad Hoc Networks. J. Intell. Robot. Syst. Theory Appl. 2014, 77, 629–652. [Google Scholar] [CrossRef]
- Kopeikin, A.; Ponda, S.S.; Inalhan, G. Control of Communication Networks for Teams of UAVs. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1619–1654. ISBN 9789048197071. [Google Scholar]
- Oh, H.; Ramezan Shirazi, A.; Sun, C.; Jin, Y. Bio-inspired self-organising multi-robot pattern formation: A review. Robot. Auton. Syst. 2017, 91, 83–100. [Google Scholar] [CrossRef]
- Garcia, G.A.; Keshmiri, S.S. Biologically inspired trajectory generation for swarming UAVs using topological distances. Aerosp. Sci. Technol. 2016, 54, 312–319. [Google Scholar] [CrossRef]
- Dehghani, M.A.; Menhaj, M.B. Communication free leader-follower formation control of unmanned aircraft systems. Robot. Auton. Syst. 2016, 80, 69–75. [Google Scholar] [CrossRef]
- Bürkle, A.; Segor, F.; Kollmann, M. Towards autonomous micro UAV swarms. J. Intell. Robot. Syst. Theory Appl. 2011, 61, 339–353. [Google Scholar] [CrossRef]
- Nagy, M.; Vasarhelyi, G.; Pettit, B.; Roberts-Mariani, I.; Vicsek, T.; Biro, D. Context-dependent hierarchies in pigeons. Proc. Natl. Acad. Sci. USA 2013, 110, 13049–13054. [Google Scholar] [CrossRef] [PubMed]
- Nagy, M.; Ákos, Z.; Biro, D.; Vicsek, T. Hierarchical group dynamics in pigeon flocks. Nature 2010, 464, 890–893. [Google Scholar] [CrossRef] [PubMed]
- SH, S. Exploring complex networks. Nature 2001, 410, 268–276. [Google Scholar] [CrossRef]
- Wang, H.; Song, Z.; Wen, R.; Zhao, Y. Study on evolution characteristics of air traffic situation complexity based on complex network theory. Aerosp. Sci. Technol. 2016, 58, 518–528. [Google Scholar] [CrossRef]
- Wang, Y.; Bi, L.; Lin, S.; Li, M.; Shi, H. A complex network-based importance measure for mechatronics systems. Phys. A Stat. Mech. Its Appl. 2017, 466, 180–198. [Google Scholar] [CrossRef]
- Cats, O.; Koppenol, G.J.; Warnier, M. Robustness assessment of link capacity reduction for complex networks: Application for public transport systems. Reliab. Eng. Syst. Saf. 2017, 167, 544–553. [Google Scholar] [CrossRef]
- Manitz, J.; Harbering, J.; Schmidt, M.; Kneib, T.; Schöbel, A. Source estimation for propagation processes on complex networks with an application to delays in public transportation systems. J. R. Stat. Soc. Ser. C Appl. Stat. 2017, 66, 521–536. [Google Scholar] [CrossRef]
- Wang, Z.; Hill, D.J.; Chen, G.; Dong, Z.Y. Power system cascading risk assessment based on complex network theory. Phys. A Stat. Mech. Its Appl. 2017, 482, 532–543. [Google Scholar] [CrossRef]
- Chai, C.L.; Liu, X.; Zhang, W.J.; Baber, Z. Application of social network theory to prioritizing Oil & Gas industries protection in a networked critical infrastructure system. J. Loss Prev. Process Ind. 2011, 24, 688–694. [Google Scholar] [CrossRef]
- Buldyrev, S.V.; Parshani, R.; Paul, G.; Stanley, H.E.; Havlin, S. Catastrophic cascade of failures in interdependent networks. Nature 2010, 464, 1025–1028. [Google Scholar] [CrossRef] [PubMed]
- Shao, J.; Buldyrev, S.V.; Havlin, S.; Stanley, H.E. Cascade of failures in coupled network systems with multiple support-dependence relations. Phys. Rev. E 2011, 83, 036116. [Google Scholar] [CrossRef] [PubMed]
- Manzano, M.; Calle, E.; Torres-Padrosa, V.; Segovia, J.; Harle, D. Endurance: A new robustness measure for complex networks under multiple failure scenarios. Comput. Netw. 2013, 57, 3641–3653. [Google Scholar] [CrossRef]
- Van Mieghem, P.; Doerr, C. A Framework for Computing Topological Network Robustness; Delft University of Technology: Delft, The Netherlands, 2010; pp. 1–11. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1: Modeling Algorithm for the control structure of Behavior-based methods |
| 1: Initialization: Va[1…n], Vb[1…n], Vc[1…n], n, m, n[1…m], 2: for i←1 to n do 3: addedge&weight [(Va[i], Vb[i], weight), (Vb[i], Vc[i], weight)] 4: for x←1 to p do 5: for j←1 to x do 6: addedge&weight[(Va[i], Va[i+x], weight), (Vb[i], Vb[i+x], weight)] 7: addedge&weight [(Va[i], Va[i+x+1], weight), (Vb[i], Vb[i+x+1], weight)] 8: addedge&weight [(Va[i+x], Va[i+x+1], weight), (Vb[i+x], Vb[i+x+1], weight)] 9: end for 10: end for 11: end for 12: for i←1 to m do 13: for j←1 to n[i] do 14: for x←j to n[i] do 15: addedge&weight (Vc[j], Vc[j+1], weight) 16: end for 17: end for 18: end for 19: return G(Ga, Gb, Gc) |
| Algorithm 2: Modeling Algorithm for the Control Structure of Leader-Follower Strategy |
| 1: Initialization: Va[1…n], Vb[1…n], Vc[1…n], n, m, n[1…m] 2: for i←1 to n do 3: addedge&weight [(Va[i], Vb[i], weight), (Vb[i], Vc[i], weight)] 4: end for 5: for i←1 to m − 1 do 6: addedge&weight (Va[i], Va[i+1], weight) 7: end for 8: for i←1 to m do 9: for j←1 to n[i]-1 do 10: addedge&weight [(Va[i], Va[j], weight), (Vb[i], Vb[j], weight)] 11: end for 12: for x←j to n[i] do 13: addedge&weight (Vc[j], Vc[j+1], weight) 14: end for 15: for j←1 to n[i]-3 do 16: addedge&weight [(Va[j], Va[j+1], weight), (Vb[j], Vb[j+1], weight)] 17: addedge&weight [(Va[j], Va[j+2], weight), (Vb[j], Vb[j+2], weight)] 18: end for 19: end for 20: return G(Ga, Gb, Gc) |
| Algorithm 3: Modeling Algorithm for the Autonomous Control Structure |
| 1: Initialization: Va[1…n], Vb[1…n], Vc[1…n], n, m, n[1…m], k 2: for i←1 to n do 3: addedge&weight [(Va[i], Vb[i], weight), (Vb[i], Vc[i], weight)] 4: end for 5: for i←1 to k do 6: for j←1 to m do 7: randomly choose nodes Va, Vb 8: if Va, Vb ≠ Va[j], Vb[j] then 9: addedge&weight [(Va, Va[j], weight),(Vb, Vb[j], weight)] 10: end if 11: end for 12: end for 13: for i←1 to m do 14: for j←1 to n[i]-1 do 15: for x←j to n[i] do 16: addedge&weight (Vc[j], Vc[j+1], weight) 17: end for 18: end for 19: end for 20: return G(Ga, Gb, Gc) |
| Features | Structure 1 | Structure 2 | Structure 3 |
|---|---|---|---|
| Number of nodes | 165 | 165 | 165 |
| Number of edges | 655 | 655 | 695 |
| Average degree | 7.94 | 7.94 | 8.42 |
| Cluster coefficient | 0.44 | 0.52 | 0.30 |
| Average length path | 4.46 | 4.28 | 3.14 |
| Features | Random Network 1 | Random Network 2 | Random Network 3 |
|---|---|---|---|
| Number of nodes | 165 | 165 | 165 |
| Number of edges | 655 | 655 | 695 |
| Cluster coefficient | 0.03 | 0.03 | 0.04 |
| Average length path | 2.68 | 2.68 | 2.60 |
| Features | Structure 1 | Structure 2 | Structure 3 |
|---|---|---|---|
| Average degree of nodes | −0.06022 | −0.06027 | −0.06023 |
| Average length path | −0.04863 | −0.04866 | −0.04886 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Lu, D.; Zhang, Y.; Wang, X. A Complex Network Theory-Based Modeling Framework for Unmanned Aerial Vehicle Swarms. Sensors 2018, 18, 3434. https://doi.org/10.3390/s18103434
Wang L, Lu D, Zhang Y, Wang X. A Complex Network Theory-Based Modeling Framework for Unmanned Aerial Vehicle Swarms. Sensors. 2018; 18(10):3434. https://doi.org/10.3390/s18103434
Chicago/Turabian StyleWang, Lizhi, Dawei Lu, Yuan Zhang, and Xiaohong Wang. 2018. "A Complex Network Theory-Based Modeling Framework for Unmanned Aerial Vehicle Swarms" Sensors 18, no. 10: 3434. https://doi.org/10.3390/s18103434
APA StyleWang, L., Lu, D., Zhang, Y., & Wang, X. (2018). A Complex Network Theory-Based Modeling Framework for Unmanned Aerial Vehicle Swarms. Sensors, 18(10), 3434. https://doi.org/10.3390/s18103434