A Novel Method for the Micro-Clearance Measurement of a Precision Spherical Joint Based on a Spherical Differential Capacitive Sensor

 , ,
, ,  ,
,
Abstract
1. Introduction
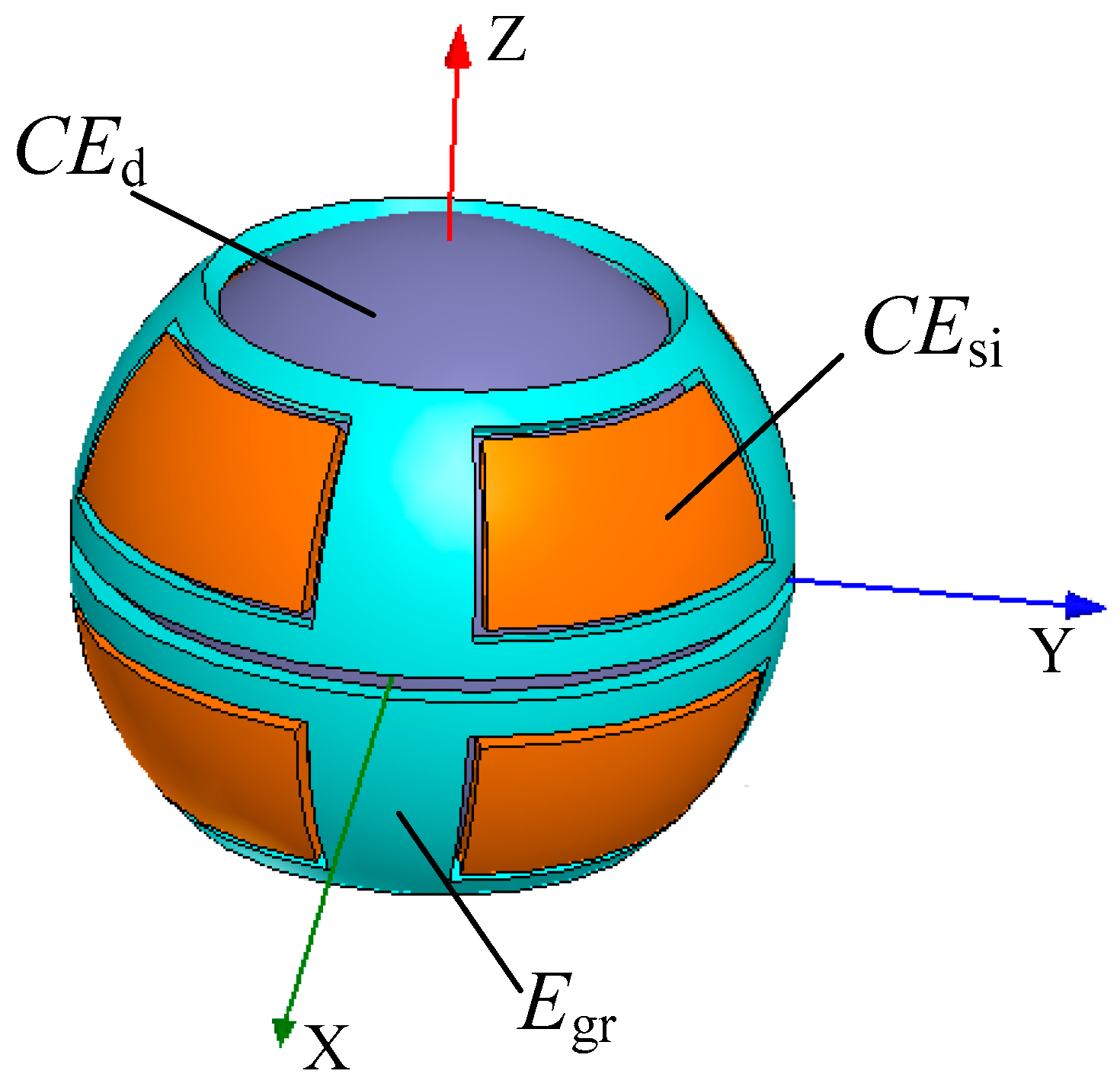
2. Structural Design and Measuring Principle
3. Mathematical Model
3.1. Calculation of the Clearance between the Ball and the Spherical Capacitive Plates
3.2. Relation between Capacitance of Spherical Capacitors and Eccentric Displacements
4. Simulation Setup
5. Results and Discussions
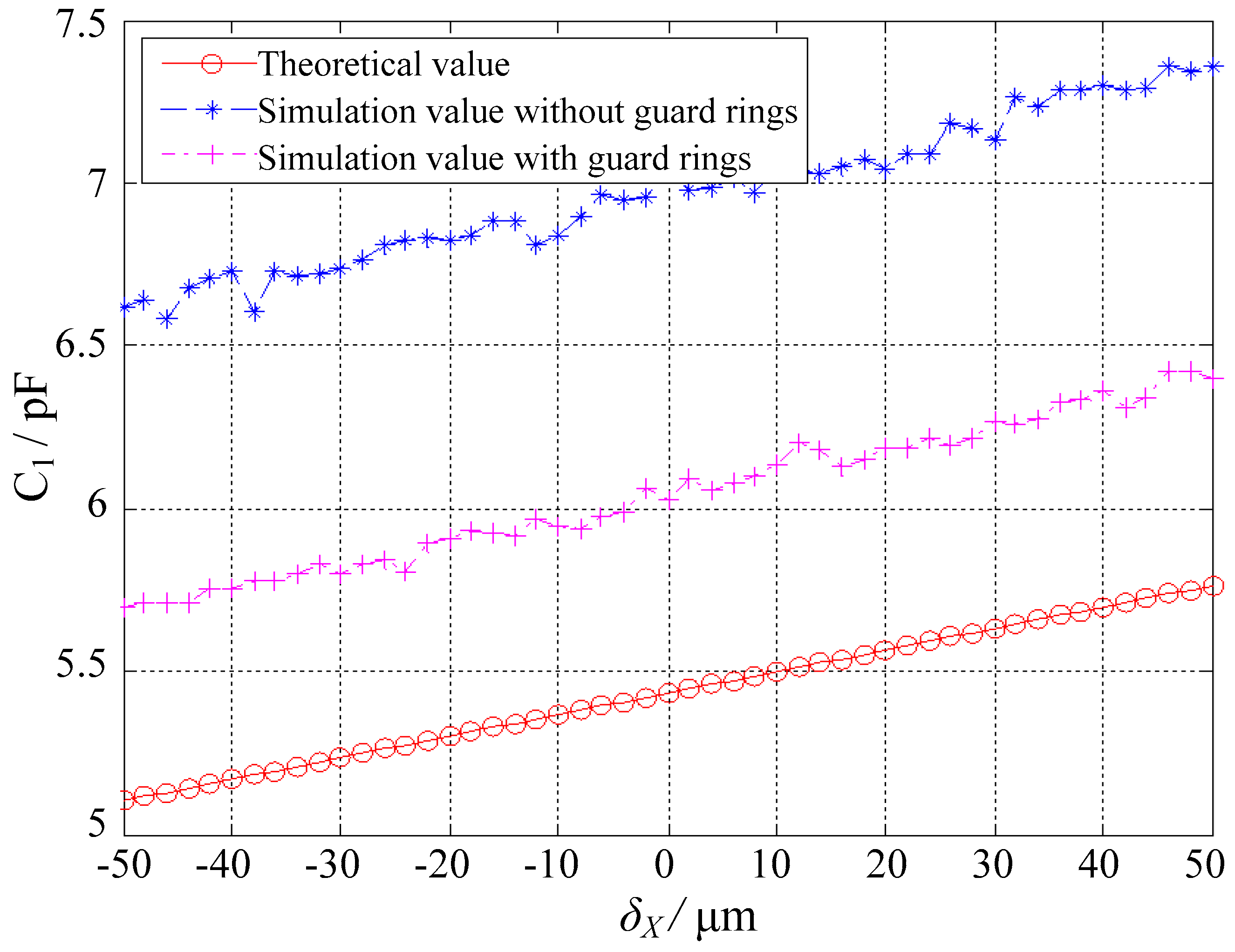
5.1. Effect of Guard Rings
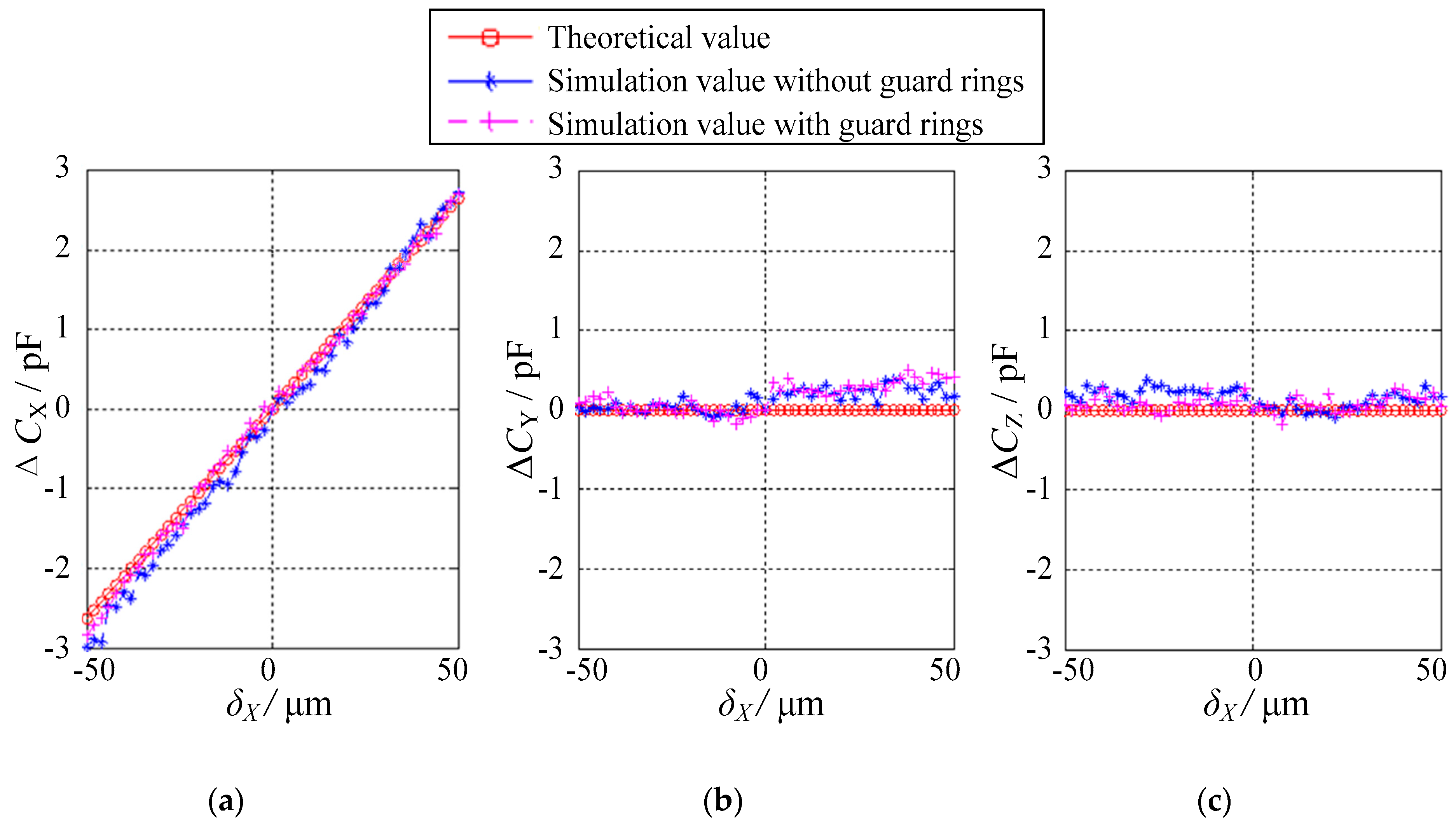
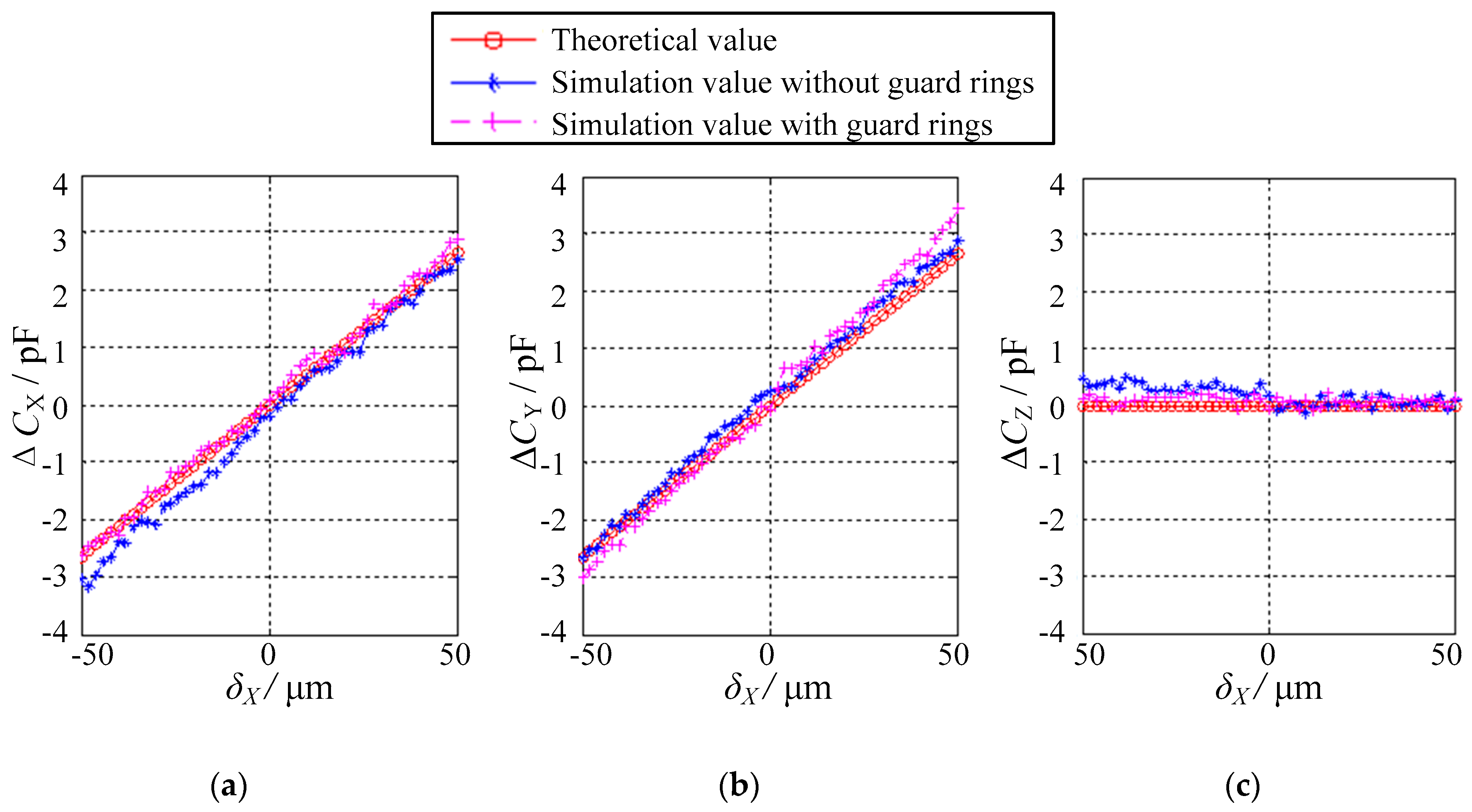
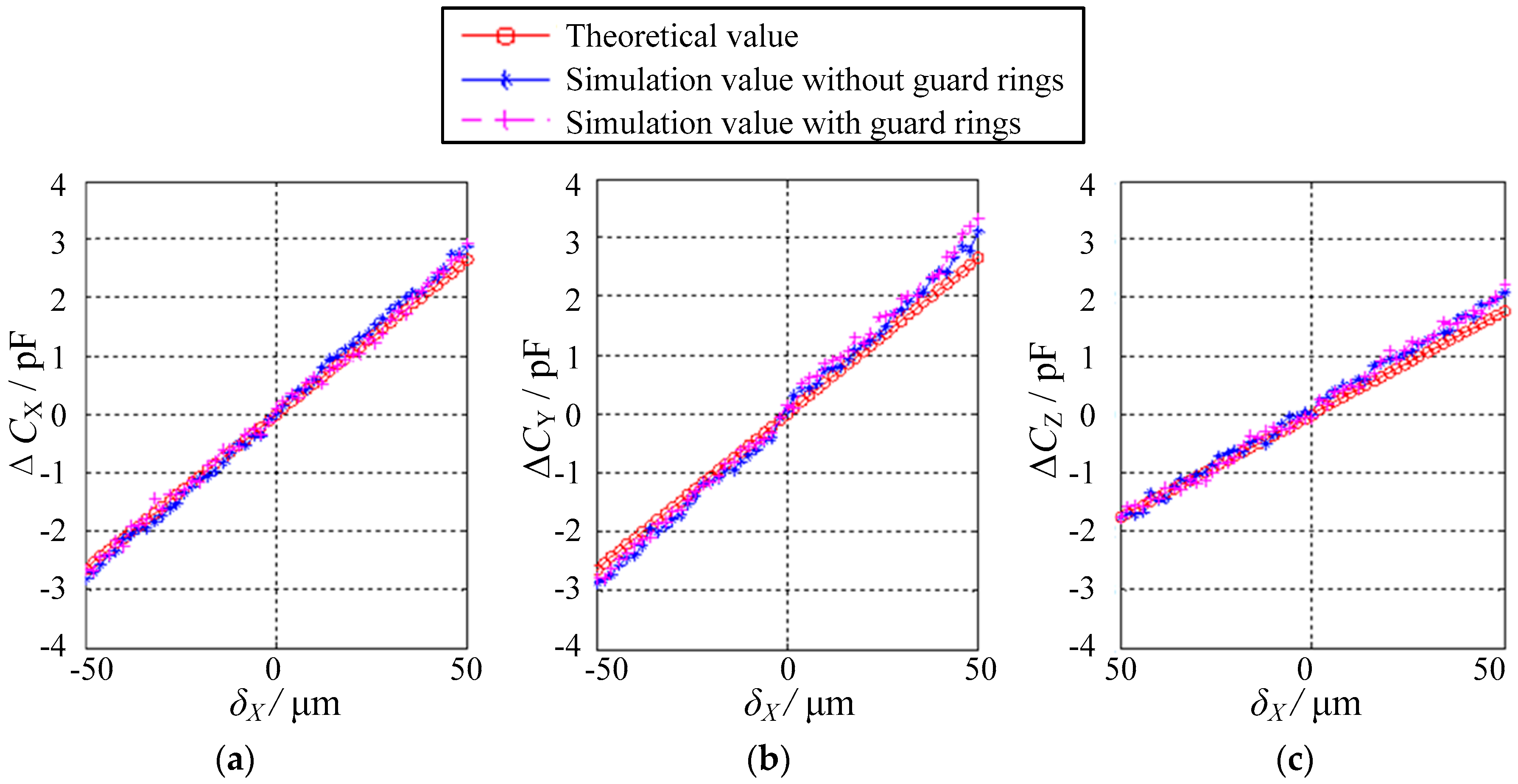
5.2. Dependence of the Differential Capacitances on the Eccentric Displacements
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Robertson, A.P.; Slocum, A.H. Measurement and characterization of precision spherical joints. Precis. Eng. 2006, 30, 1–12. [Google Scholar] [CrossRef]
- Zhu, J.; Ting, K.L. Uncertainty analysis of planar and spatial robots with joint clearances. Mech. Mach. Theory 2000, 35, 1239–1256. [Google Scholar] [CrossRef]
- Han, Y.; Zhong, C.; Zhu, X.; Zhe, J. Online monitoring of dynamic tip clearance of turbine blades in high temperature environments. Meas. Sci. Technol. 2018, 29, 045102. [Google Scholar] [CrossRef]
- Garcia, I.; Przysowa, R.; Amorebieta, J.; Zubia, J. Tip-clearance measurement in the first stage of the compressor of an aircraft engine. Sensors 2016, 16, 1897. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Duan, F.; Niu, G.; Jiang, J.; Li, J. A blade tip timing method based on a microwave sensor. Sensors 2017, 17, 1097. [Google Scholar] [CrossRef] [PubMed]
- Jamia, N.; Friswell, M.I.; El-Borgi, S.; Fernandes, R. Simulating eddy current sensor outputs for blade tip timing. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Lawson, C.P.; Ivey, P.C. Tubomachinery blade vibration amplitude measurement through tip timing with capacitance tip clearance probes. Sens. Actuators A Phys. 2005, 118, 14–24. [Google Scholar] [CrossRef]
- Endemano, A.; Desmulliez, M.P.Y.; Dunnigan, M. System level simulation of a double stator wobble electrostatic micromotor. Sens. Actuators A Phys. 2002, 99, 312–320. [Google Scholar] [CrossRef]
- Han, F.T.; Gao, Z.Y.; Li, D.M.; Wang, Y.L. Nonlinear compensation of active electrostatic bearings supporting a spherical rotor. Sens. Actuators A Phys. 2005, 119, 177–186. [Google Scholar] [CrossRef]
- Han, F.T.; Gao, Z.Y.; Wang, Y.L. Modelling and linearization for long-range spherical gap measurement. Chin. J. Sci. Instrum. 2002, 23, 257–260. (In Chinese) [Google Scholar] [CrossRef]
- Gao, Z.Y. Electrostatically Suspended Gyroscope Technology; Tsinghua University Press: Beijing, China, 2004; ISBN 9787302087786. (In Chinese) [Google Scholar]
- Hill, D.A.; Letendre, T.; Mills, H.A. Embedded, real-time DSP control of an electrostatically suspended gyroscope. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 4, pp. 3321–3326. [Google Scholar]
- Liu, J.H.; Wang, H.; Chang, K.; Li, X.; Wang, Q.L. Design and test of displacement transducer for an electrode-insulated electrostatically suspended gyroscope. In Proceedings of the 2015 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices, Shanghai, China, 20–23 November 2015; pp. 429–430. [Google Scholar]
- Han, F.T.; Wu, Q.P.; Gao, Z.Y. Initial levitation of an electrostatic bearing system without bias. Sens. Actuators A Phys. 2006, 130–131, 513–522. [Google Scholar] [CrossRef]
- Baxter, L.K. Capacitive Sensors: Design and Applications; IEEE Press: New York, NY, USA, 1997; ISBN 9780780353510. [Google Scholar]
- Heerens, W.C. Application of capacitance techniques in sensor design. J. Phys. E Sci. Instrum. 1986, 19, 897–906. [Google Scholar] [CrossRef]
- Wang, W.; Wen, Y.H.; Yu, J.P.; Chen, Z. Impact of fringe effect on measuring accuracy of planar capacitive sensors. Sens. Lett. 2011, 9, 1458–1461. [Google Scholar] [CrossRef]
- Ma, Y.Z.; Yu, Y.X.; Wang, X.H. Key technique for inner hole diameter measure with capacitive probe. Appl. Mech. Mater. 2013, 303–306, 827–830. [Google Scholar] [CrossRef]
- Weng, C.W.; Jin, A.K. Effect of fringing fields on the capacitance of circular microsrip disk. IEEE Trans. Microw. Theory 1980, 28, 98–104. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit Pair | Capacitors for Unit 1 | Capacitors for Unit 2 |
|---|---|---|
| Cup-X | C1, C4, C5 and C8 | C2, C3, C6 and C7 |
| Cup-Y | C1, C2, C5 and C6 | C3, C4, C7 and C8 |
| Cup-Z | C1, C2, C3 and C4 | C5, C6, C7 and C8 |
| Parameters | Values |
|---|---|
| The angle of spherical capacitive plates in the longitude direction ζ | π/6 |
| The angle of spherical capacitive plates in the latitude direction ξ | π/3 |
| The angle of the clearance between the guard ring η | π/90 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Yang, H.; Zhang, M.; Chen, Z.; Shi, G.; Lu, K.; Xiang, K.; Ju, B. A Novel Method for the Micro-Clearance Measurement of a Precision Spherical Joint Based on a Spherical Differential Capacitive Sensor. Sensors 2018, 18, 3366. https://doi.org/10.3390/s18103366
Wang W, Yang H, Zhang M, Chen Z, Shi G, Lu K, Xiang K, Ju B. A Novel Method for the Micro-Clearance Measurement of a Precision Spherical Joint Based on a Spherical Differential Capacitive Sensor. Sensors. 2018; 18(10):3366. https://doi.org/10.3390/s18103366
Chicago/Turabian StyleWang, Wen, He Yang, Min Zhang, Zhanfeng Chen, Guang Shi, Keqing Lu, Kui Xiang, and Bingfeng Ju. 2018. "A Novel Method for the Micro-Clearance Measurement of a Precision Spherical Joint Based on a Spherical Differential Capacitive Sensor" Sensors 18, no. 10: 3366. https://doi.org/10.3390/s18103366
APA StyleWang, W., Yang, H., Zhang, M., Chen, Z., Shi, G., Lu, K., Xiang, K., & Ju, B. (2018). A Novel Method for the Micro-Clearance Measurement of a Precision Spherical Joint Based on a Spherical Differential Capacitive Sensor. Sensors, 18(10), 3366. https://doi.org/10.3390/s18103366