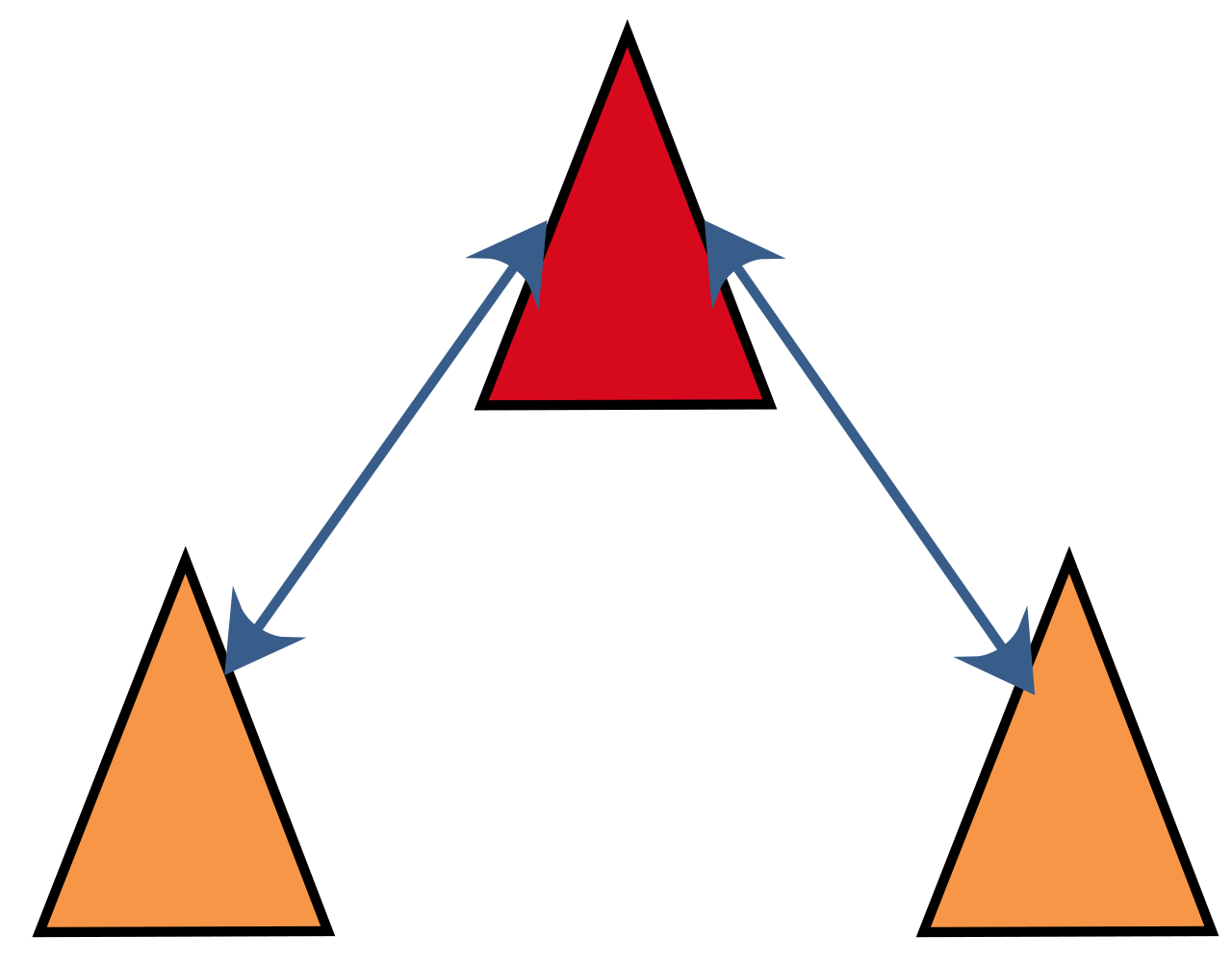
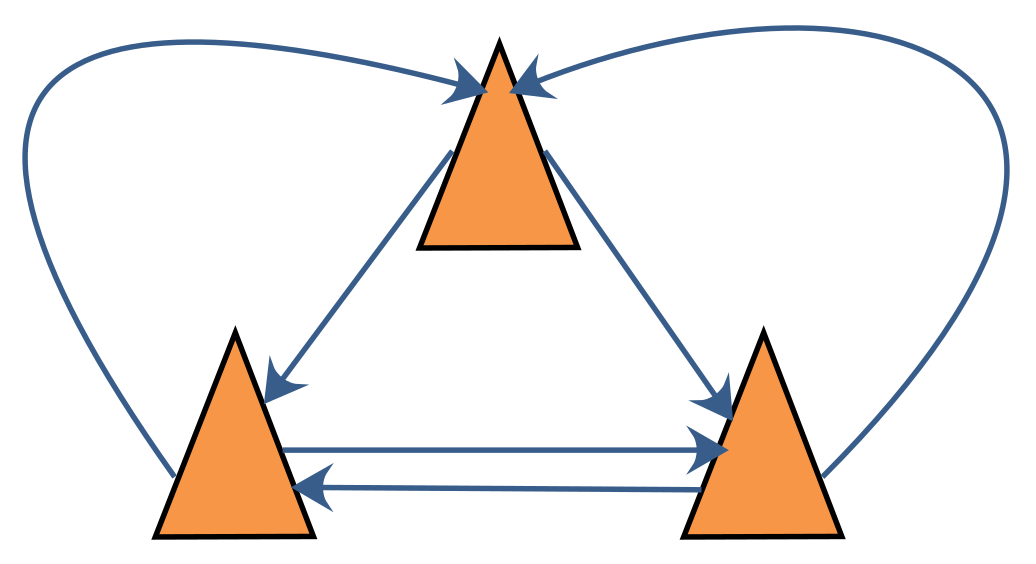
The DCL algorithm with FDI is introduced in this section. The communication graph of DCL in a robot team with three robot members, where each robot communicates only with its neighbors, is shown in
Figure 4. As shown in this figure, there is no fusion center in DCL; instead, every robot executes its own localization and FDI algorithm to calculate its own position. In contrast with the fusion center in CCL, which can obtain all the information that it needs, in DCL, every robot can obtain information only from its neighbors. For this reason, the information available to every robot in DCL is limited, and the FDI algorithms designed for CCL are not applicable to DCL. To enable the application of FDI in DCL, a novel FDI algorithm is introduced in this section.
3.1. Decentralized Cooperative Localization Algorithm
In this section, the method for achieving DCL using the SCIF (abbreviated henceforth as SCIFCL) is introduced. The SCIFCL algorithm is presented as Algorithm 2.
| Algorithm 2 DCL Algorithm with the SCIF (SCIFCL): |
- 1:
for to N do - 2:
- 3:
- 4:
- 5:
- 6:
if there exists a relative measurement between robot j and robot i then - 7:
- 8:
- 9:
- 10:
end if - 11:
end for
|
The state model of robot
i in a multiple mobile robots team can be expressed as
where
is the state vector of robot
i:
and
Here, and are the elementary displacement and rotation, respectively, of robot i.
In summary, the state model of the multirobot system consists of differentially driven robots governed by a linear control law.
And the Jacobian matrices
and
are written as
and
In DCL, in addition to the covariance of the robot itself,
, two additional covariances,
and
, are also calculated as follows:
When robot i is observed by robot j, the measurement model can be written as
Thus, the measurement of
can be written as
where
Then, the measurement and the observation to be fused are
and
, respectively, where
Here, the Jacobian matrices
and
can be expressed as
Applying the SCIF to the cooperative localization problem, we obtain that
Writing the above equation in Kalman filter form, we obtain that
where
.
Thus, the fused result is .
3.2. Fault Detection and Isolation in Decentralized Cooperative Localization
After estimating the locations of the robot team via SCIFCL, the FDI algorithm is implemented. As mentioned above, in DCL, each member of the team communicates only with its neighbors, and thus, the information available to each robot for FDI is limited. To resolve this problem, an improved FDI algorithm is developed.
To evaluate the possibility of the presence of faulty sensors, the Kullback–Leibler divergence (KLD) between the results of estimation before and after the measurement update is calculated. The KLD is a measure of the extent of one probability distribution diverges from another. If
and
are two-dimensional Gaussian distributions, with respective means of
and
and covariance matrices
and
, then the KLD can be calculated using Equation (
28):
Here, the mean and the covariance matrix of the state estimate before the measurement update correspond to the prior probability distribution, while the mean and the covariance matrix of the state estimate after the measurement update correspond to the posterior probability distribution.
Since both the prior and posterior probability distributions are two-dimensional Gaussian distributions, each robot can use the information obtained from its neighbors to calculate
, as an indicator of the possible presence of a fault of robot
i, as shown in Equation (
29).
With the threshold optimization algorithm mentioned in
Section 2, the problem of fault detection in DCL is simplified to find the
which maximizes the value of
in Equation (
30).
Here the state space of S consists of two values: or , where represents the absence of faulty sensors and represents the presence of faulty sensors.
And the threshold
can be expressed as the function of
.
Here the threshold is obtained by Algorithm 1.
After fault detection, if a fault in a robot is detected, then the fault isolation procedure is applied to identify the faulty robot. KL residuals are calculated to isolate the fault. The number of KL residuals calculated depends on the number of inter-robot observations. For example, when robot
j is observed by robot
i, the KL residual
is calculated as shown in Equation (
32):
Here, denotes the estimation calculated by robot i based on its observation of robot j.
Each KL residual is sensitive to some faults and insensitive to others. For example, the value of
depends on the odometers of robots
i and
j and the observation of robot
j as measured by robot
i.
If the value of
satisfies Equation (
33), then there may be a fault in the odometer of robot
j or
i or in robot
i’s observation of robot
j. The corresponding signal value is equal to 1. As an illustrative example, the signature matrix of robot 1 is given in
Table 1.
Since the authors of [
16] utilized lidar and Kinect to capture the relative position of other robot, the observation here may represent the sensor information from these two sensors.
However, it is difficult to isolate the faulty sensors with signature matrices described above. To enable FDI in DCL, the signature matrices are simplified by combining the information on the observation and the odometer sensor for each robot. Here, the grouped observation information for each robot is sensitive to faults in both the observation and the odometer sensor of that robot. The corresponding signal value will equal to 1 when either the observation or the odometer sensor is faulty. Thus, the signature matrices are modified as shown in
Table 2,
Table 3 and
Table 4 for the case of a robot team with three members.
However, after this simplification, there is one fault type that cannot be isolated. If faults exist in both sensors, then the signature matrices will both be equal to (1, 1), which is same with the case that faults exist in both observations. Thus, no observation information will be accepted, even if these sensors are free of faults.
To solve this problem, we add another set of KLD entries to the signature matrix based on the measured divergence between the observations of the two robots being observed. Thus, the signature matrices are modified to those shown in
Table 5,
Table 6 and
Table 7. The proposed signature matrices can be used to identify more fault types than is possible with the classic isolation algorithm.
Here,
denotes the observation of robot
k as measured by robot
i.
If the value of
satisfies Equation (
35), the corresponding signal value is equal to 1.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}