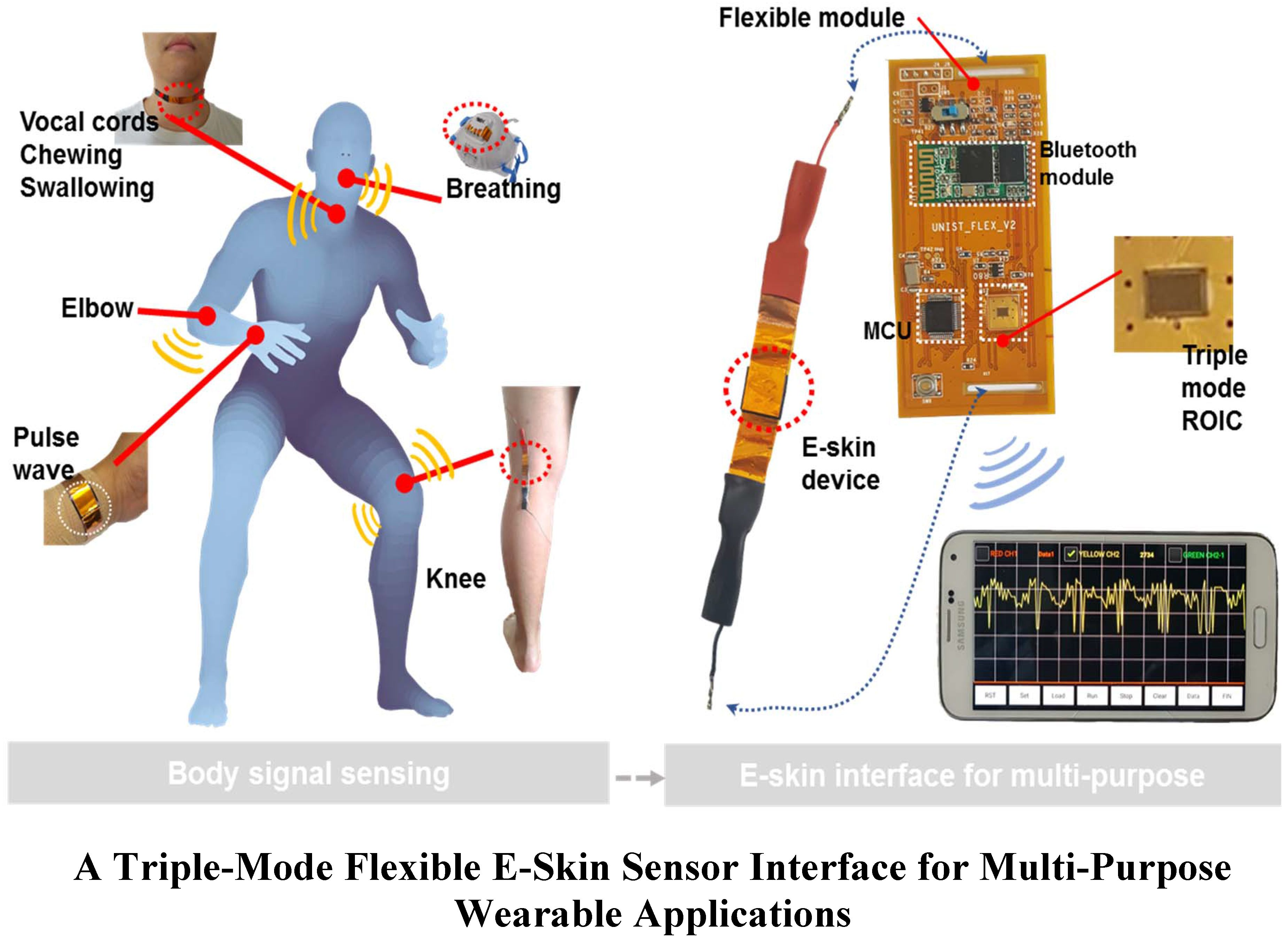
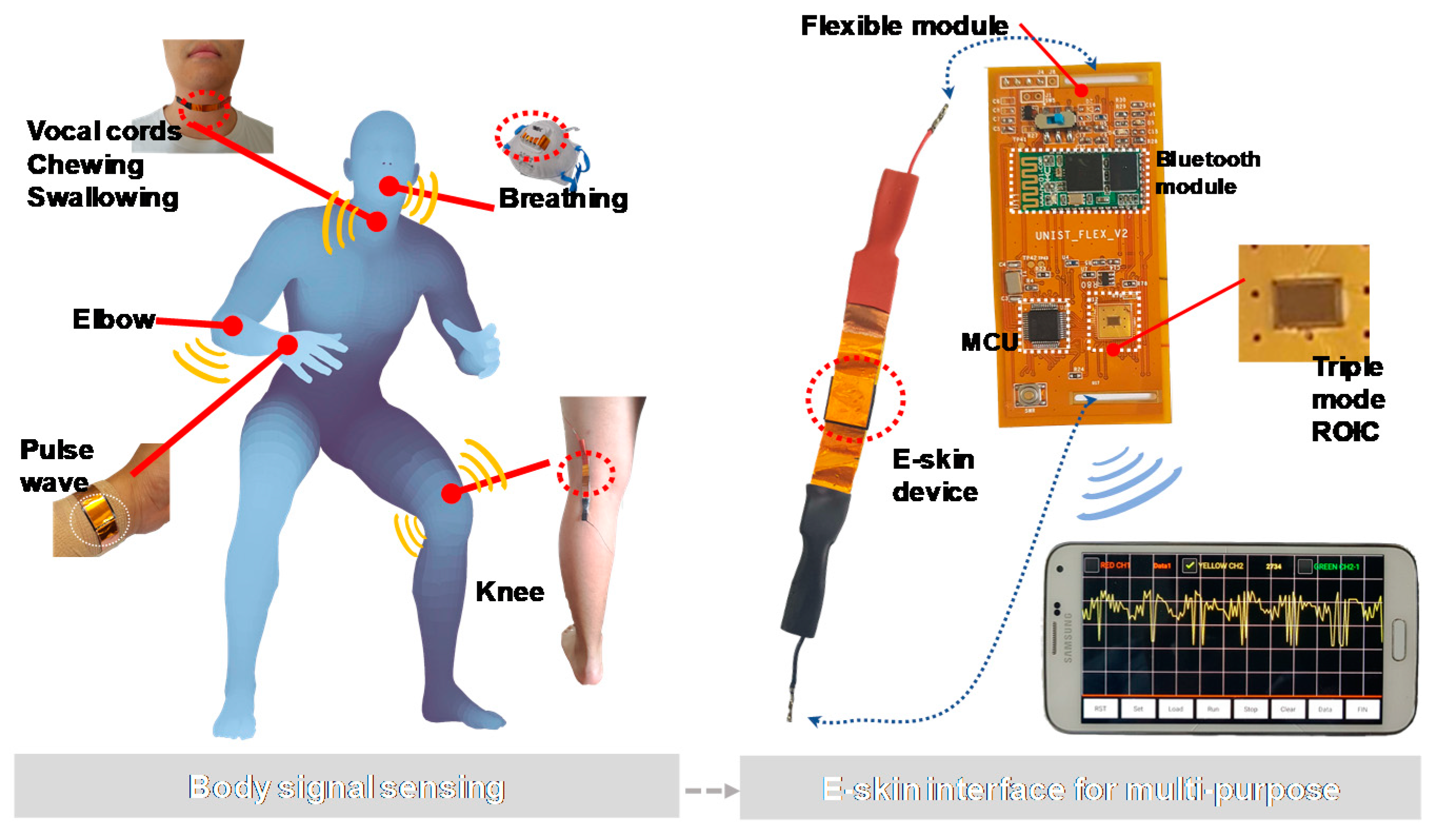
A Triple-Mode Flexible E-Skin Sensor Interface for Multi-Purpose Wearable Applications


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Triple-Mode E-Skin Integrated Electronic System
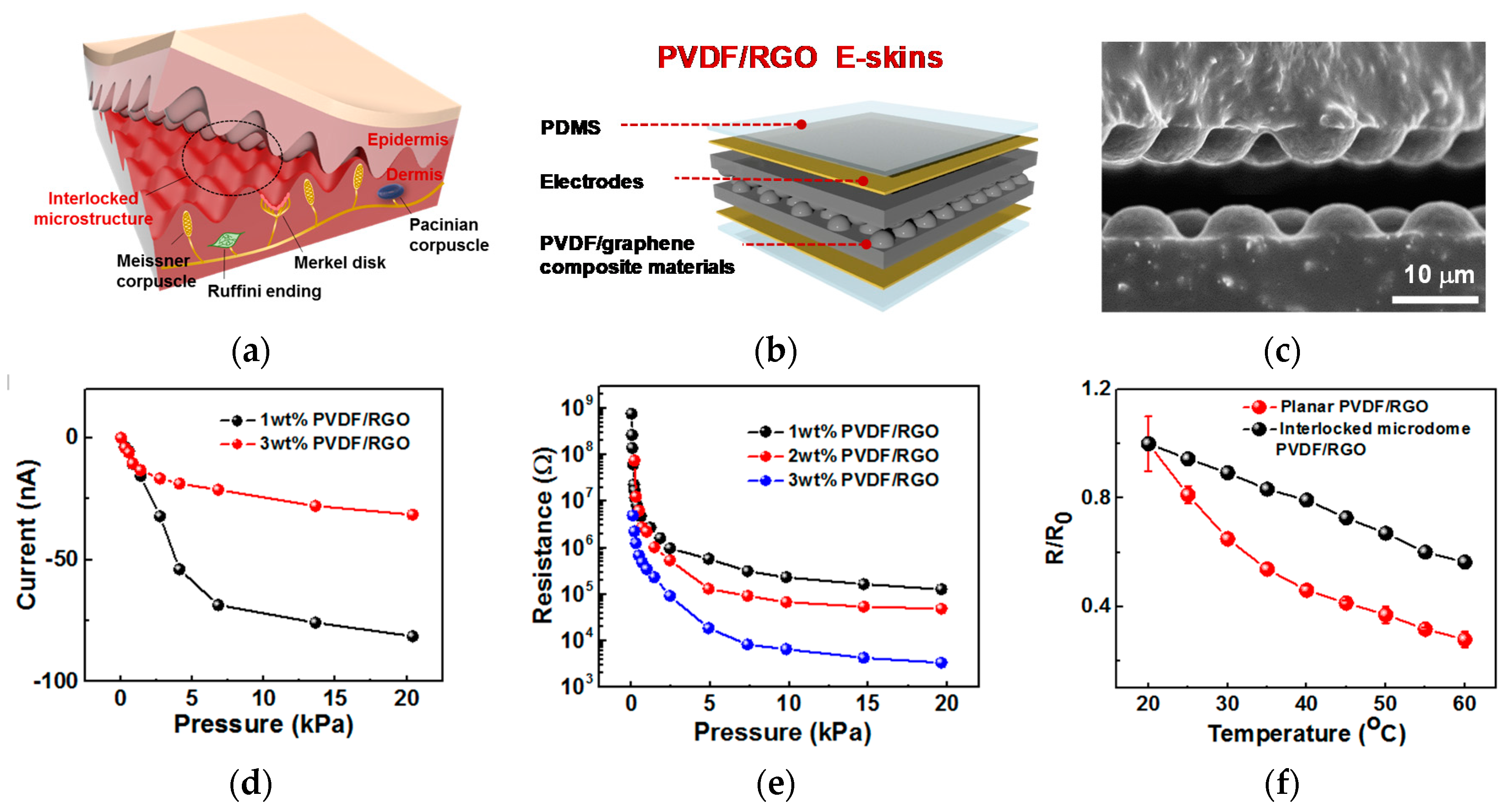
2.1. E-Skin Device Fabrication
2.2. Electrical Characteristics of an E-Skin Device
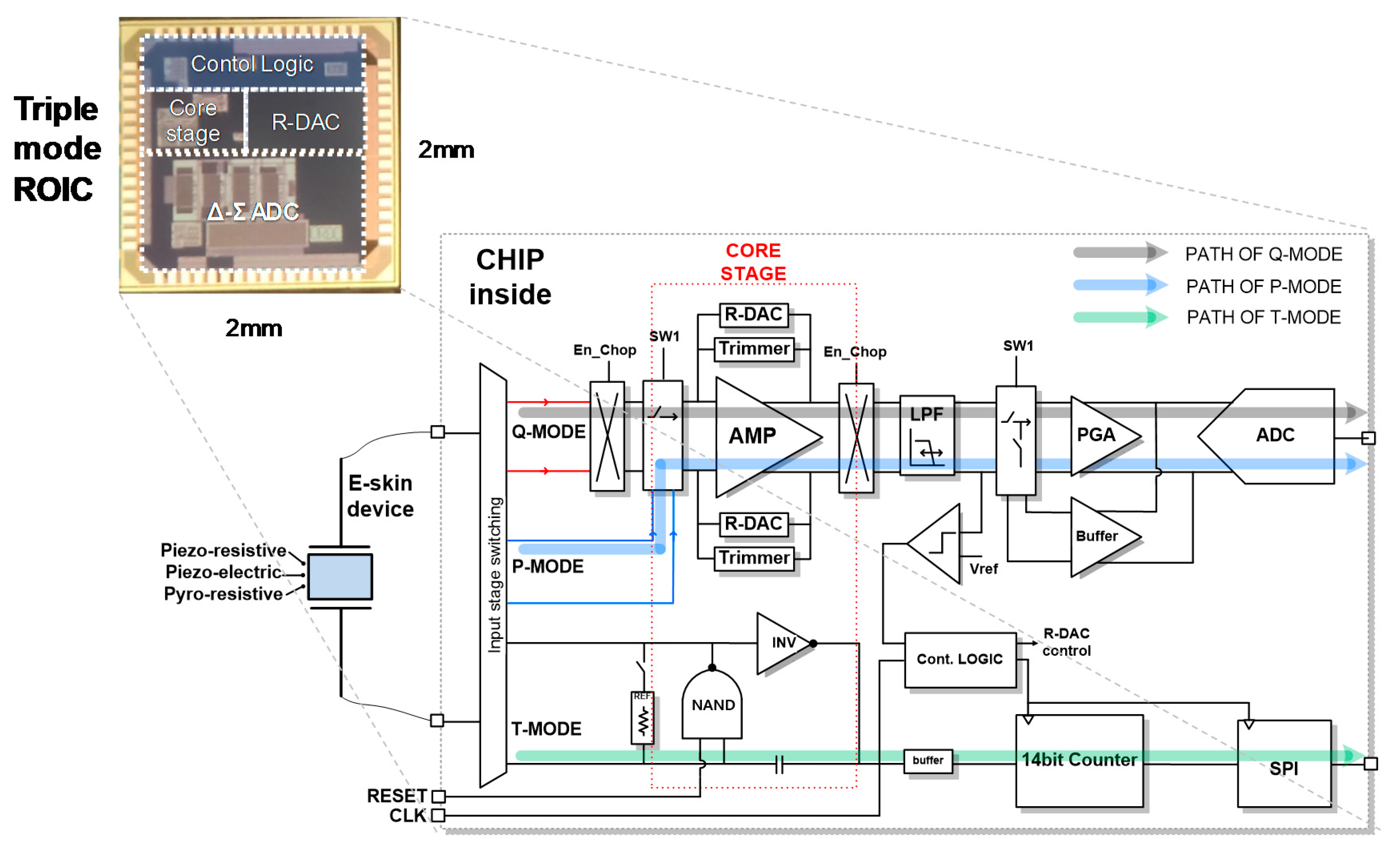
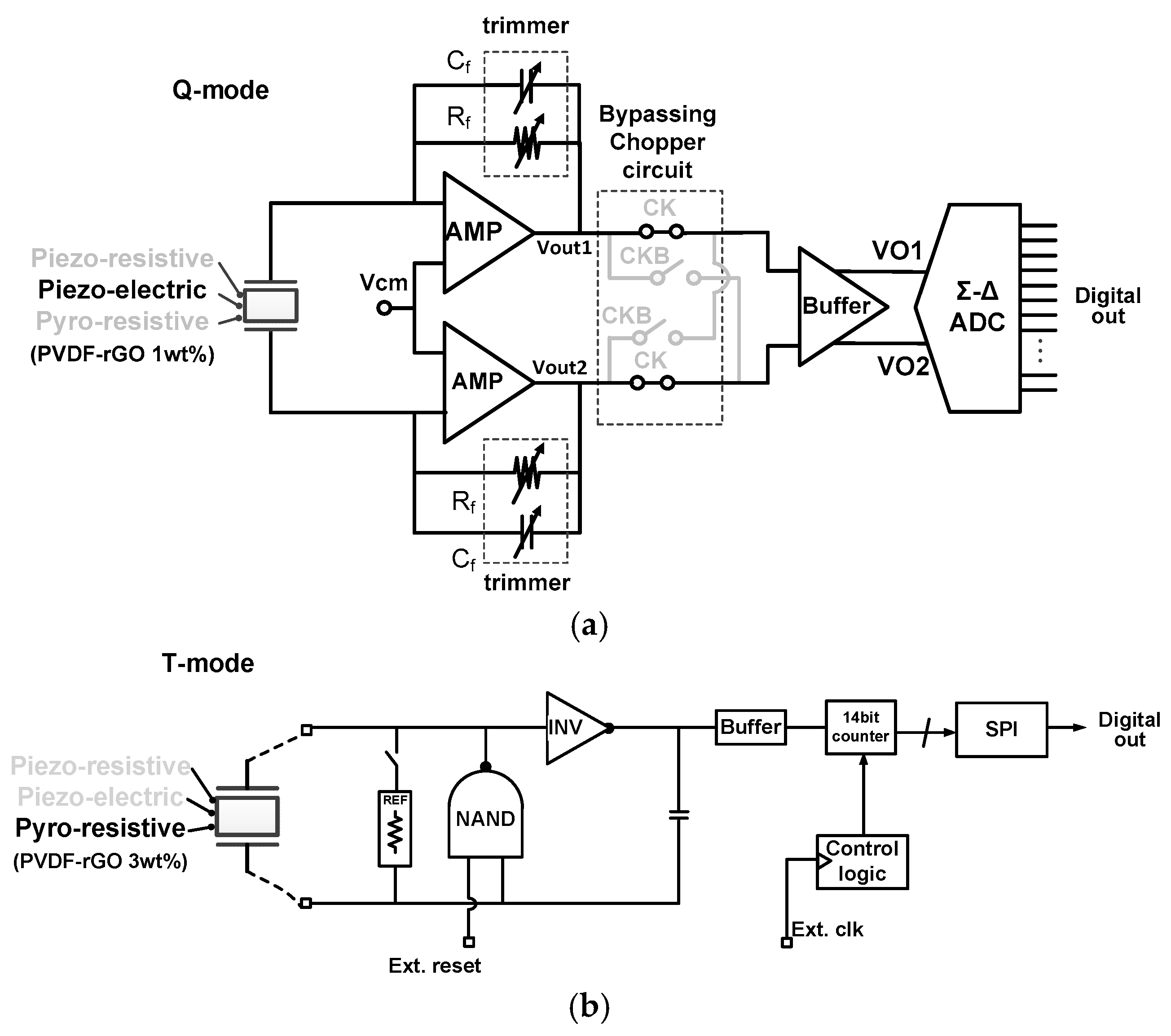
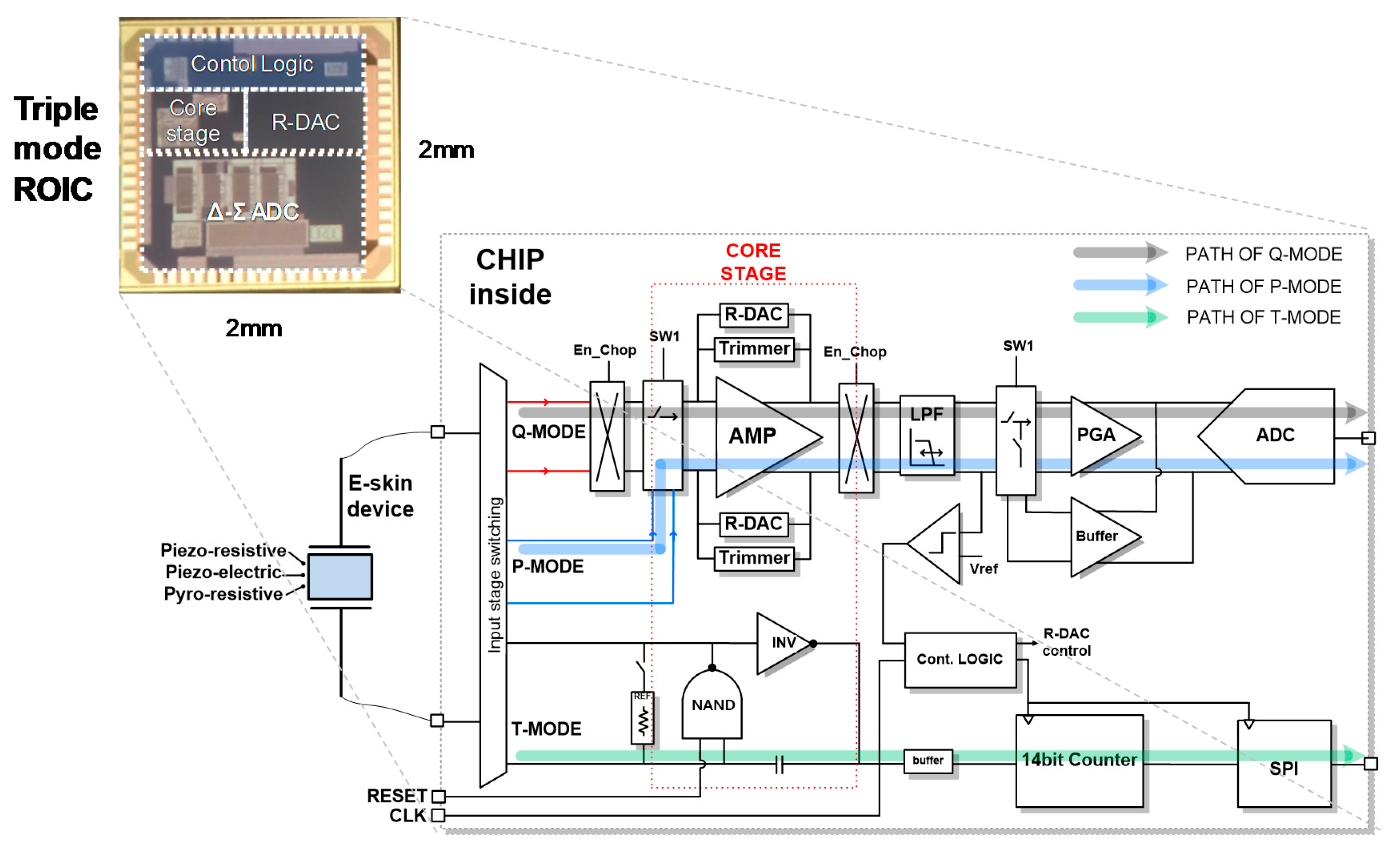
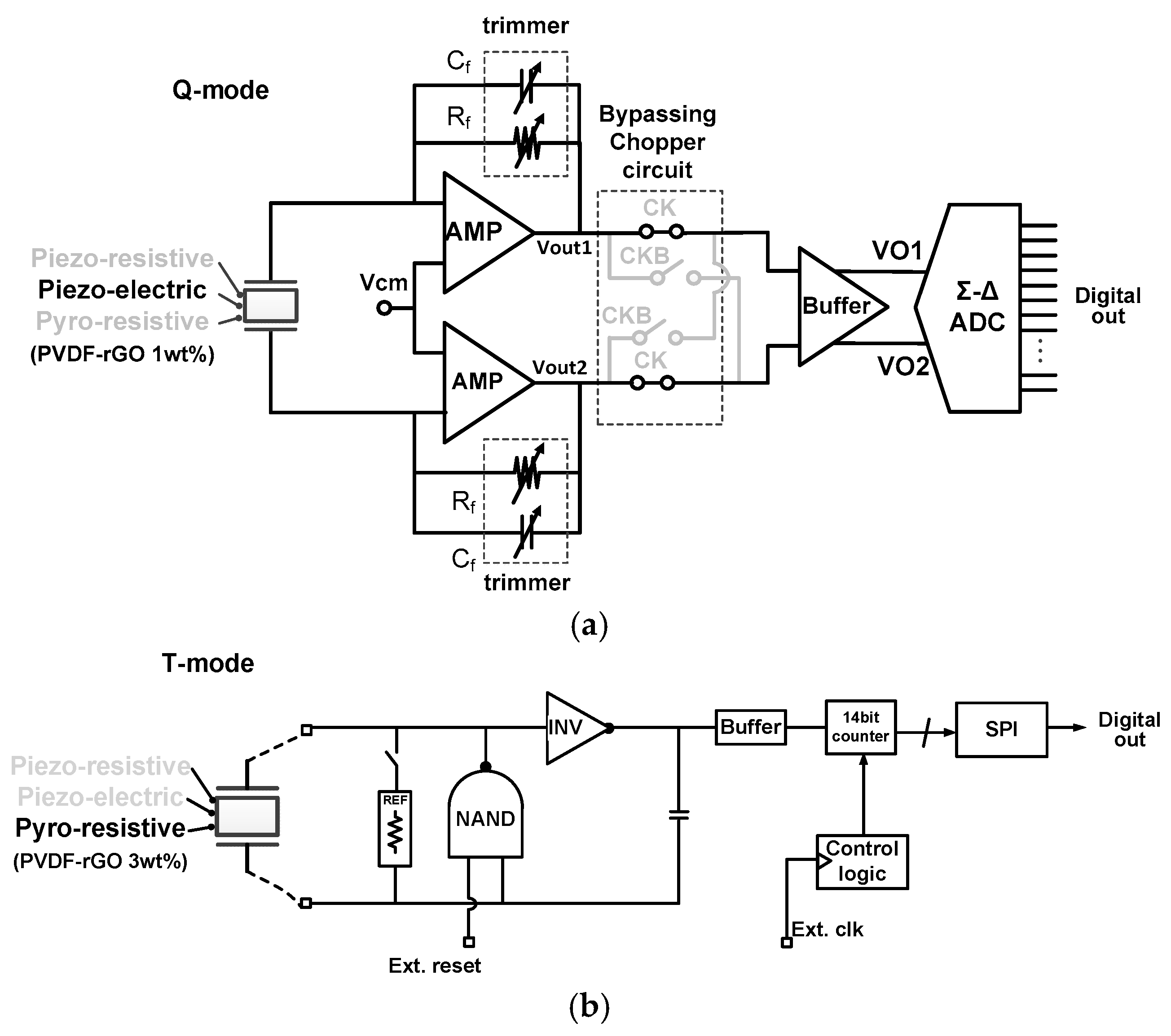
3. ROIC Implementation
Triple-Mode Reconfigurable ROIC for an E-Skin Device
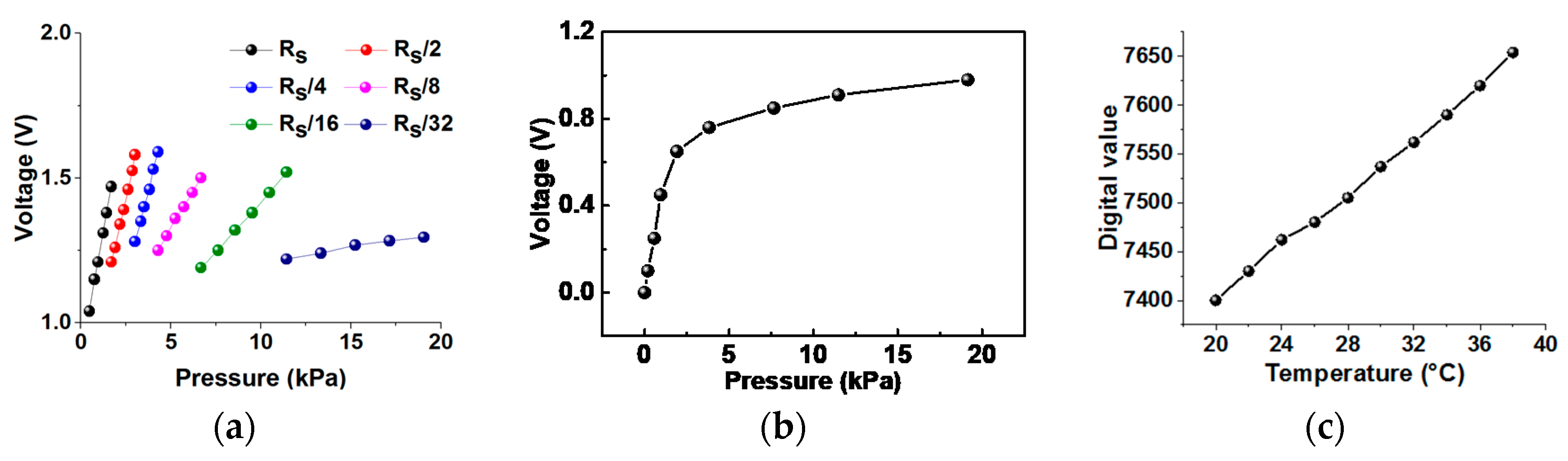
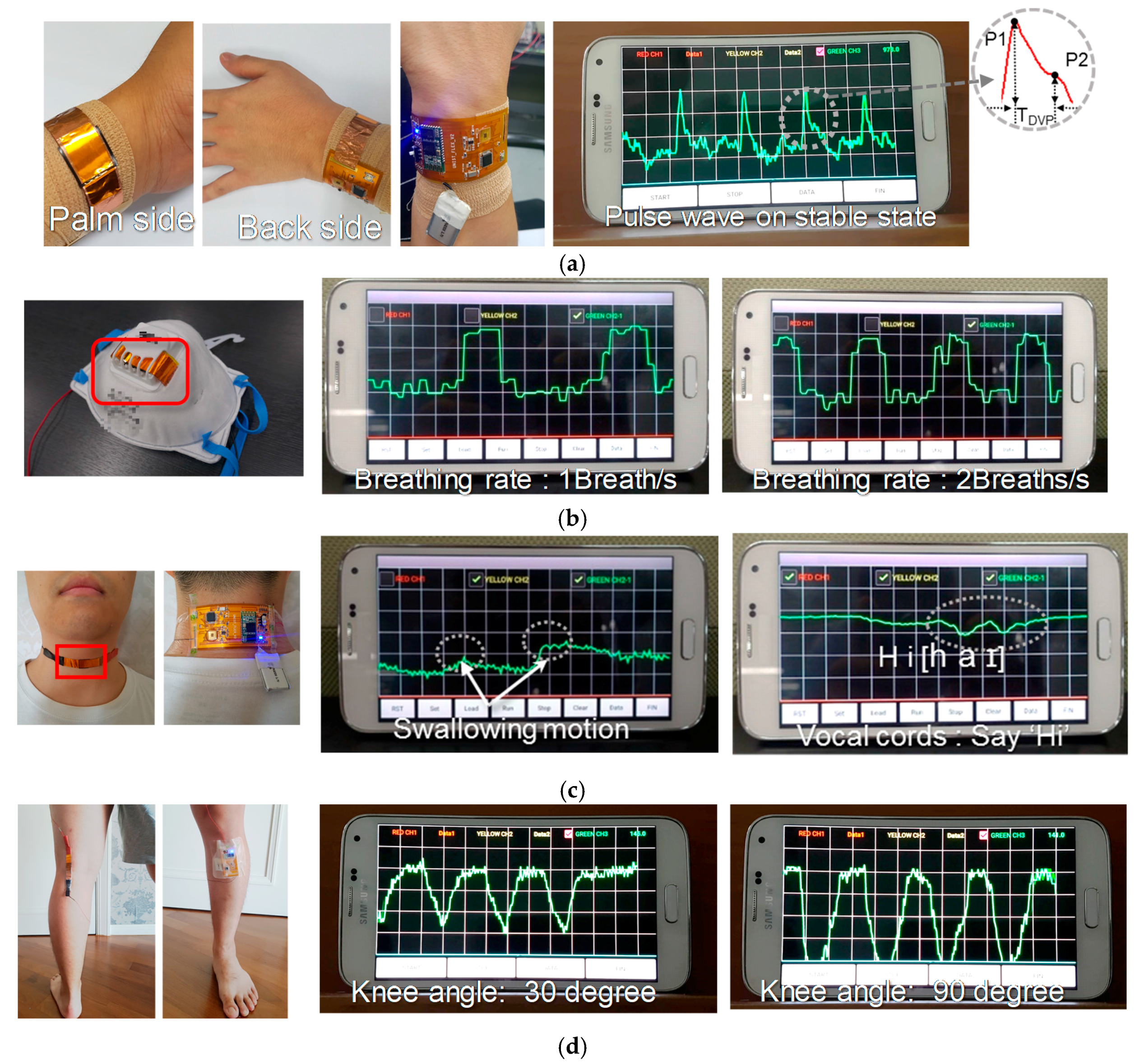
4. Experimental Results
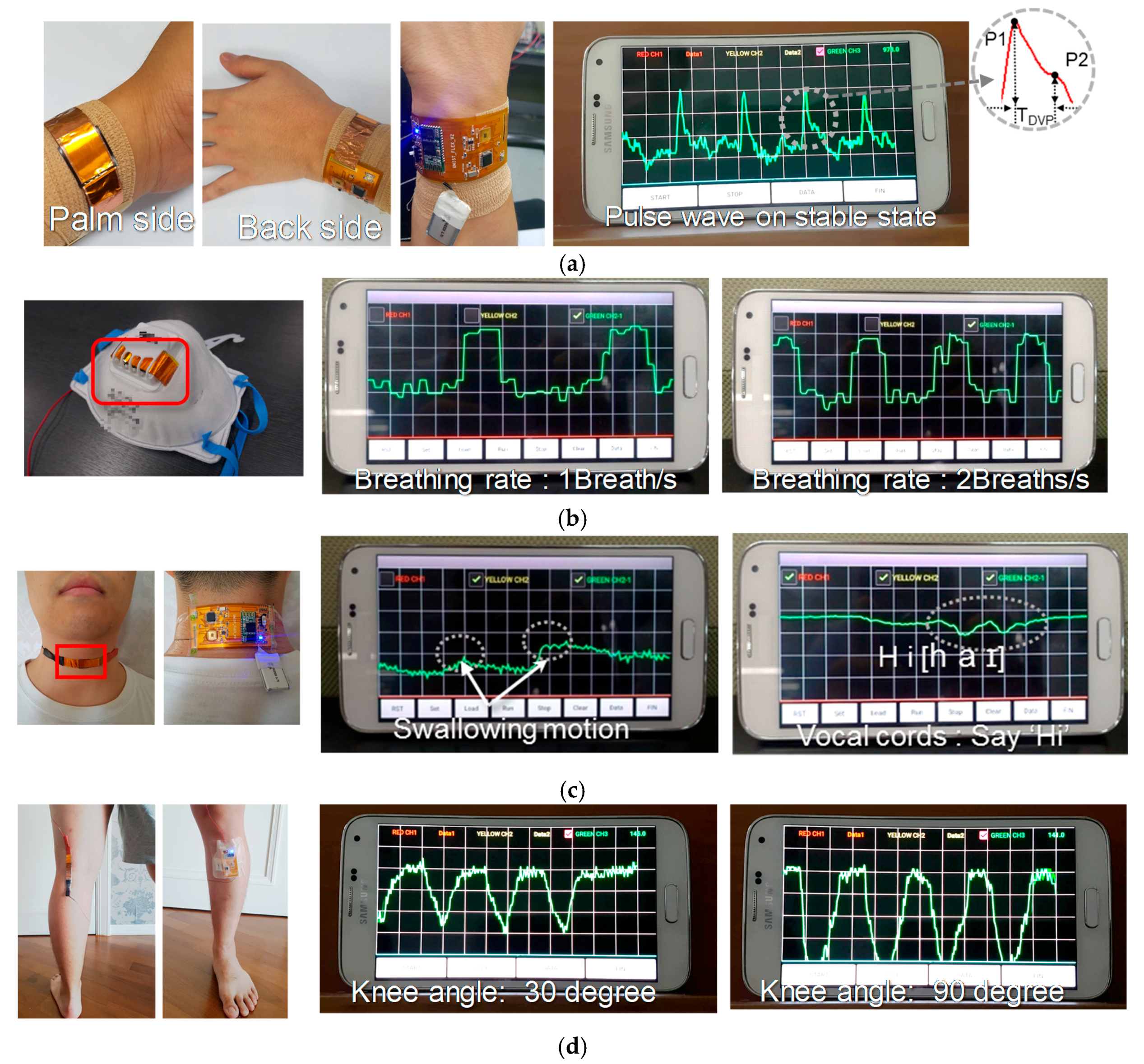
4.1. Flexible E-Skin Sensor Module
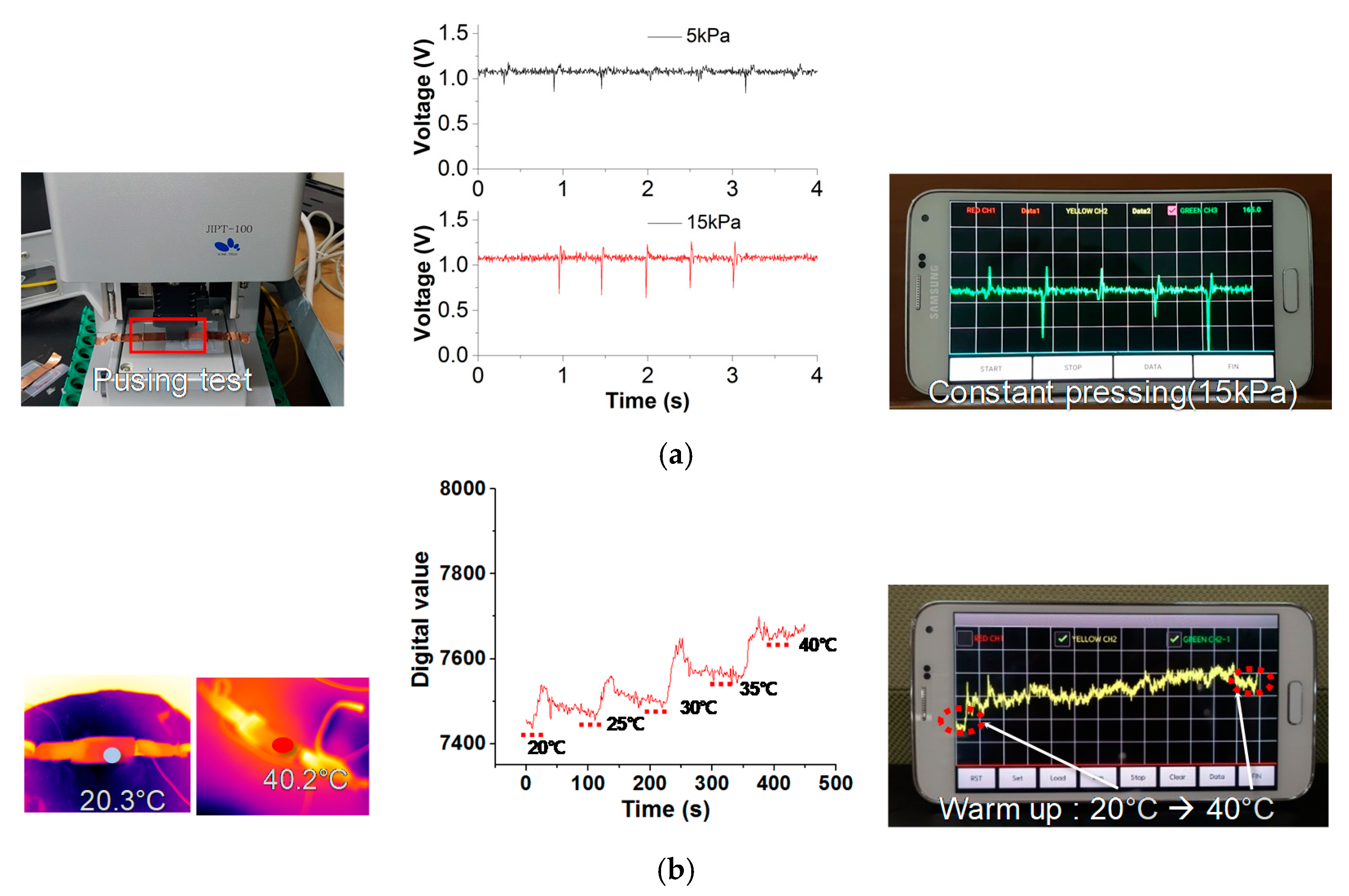
4.2. Measurement Results of E-Skin Sensor Interfaces
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zheng, Y.-L.; Ding, X.-R.; Poon, C.C.P.; Lo, B.P.L.; Zhang, H.; Zhou, X.-L.; Yang, G.-Z.; Zhao, N.; Zhang, Y.-T. Unobtrusive Sensing and Wearable Devices for Health Informatics. IEEE Trans. Biomed. Eng. 2014, 61, 1538–1554. [Google Scholar] [CrossRef] [PubMed]
- Woo, S.H.; Choi, Y.Y.; Kim, D.J.; Bien, F.; Kim, J.J. Tissue-Informative Mechanism for Wearable Non-invasive Continuous Blood Pressure Monitoring. Sci. Rep. 2014, 5, 6618. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Kim, D.J.; Choi, Y.Y.; Park, K.; Kim, S.-W.; Woo, S.H.; Kim, J.J. A Multi-Sensor Mobile Interface for Industrial Environment and Healthcare Monitoring. IEEE Trans. Ind. Electron. 2017, 64, 2344–2352. [Google Scholar] [CrossRef]
- Wang, H.; Dong, L.; Zhang, H.; Yu, R.; Pan, C.; Wang, Z.L. Recent progress in electronic skin. Adv. Sci. 2015, 2, 1500169. [Google Scholar] [CrossRef] [PubMed]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.-K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotech. 2011, 6, 788–792. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Lee, Y.; Hong, J.; Lee, Y.; Ha, M.; Jung, Y.; Lim, H.; Kim, S.Y.; Ko, H. Tactile-direction-sensitive and stretchable electronic skins based on human-skin-inspired interlocked microstructures. ACS. Nano 2014, 8, 12020–12029. [Google Scholar] [CrossRef] [PubMed]
- Lee, T.; Lee, W.; Kim, S.-W.; Kim, J.J.; Kim, B.-S. Flexible Textile Strain Wireless Sensor Functionalized with Hybrid Carbon Nanomaterials Supported ZnO Nanowires with Controlled Aspect Ratio. Adv. Funct. Mater. 2016, 26, 6206–6214. [Google Scholar] [CrossRef]
- Kang, D.; Pikhitsa, P.V.; Choi, Y.W.; Lee, C.; Shin, S.S.; Piao, L.; Park, B.; Suh, K.-Y.; Kim, T.-I.; Choi, M. Ultrasensitive mechanical crack-based sensor inspired by the spider sensory system. Nat. Lett. 2014, 516, 222–226. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.S.; Shin, K.-Y.; Cheong, O.J.; Kim, J.H.; Jang, J. Highly sensitive and multifunctional tactile sensor using free-standing ZnO/PVDF thin film with graphene electrodes for pressure and temperature monitoring. Sci. Rep. 2015, 5, 7887. [Google Scholar] [CrossRef] [PubMed]
- Hammock, M.L.; Chortos, A.; Tee, B.C.-K.; Tok, J.B.-H.; Bao, Z. 25th Anniversary article: The evolution of electronic skin (E-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.; Choi, Y.Y.; Kim, D.J.; Chae, H.Y.; Park, K.; Oh, Y.M.; Woo, S.H.; Kim, J.J. A wireless ExG interface for patch-type ECG holter and EMG-controlled robot hand. Sensors 2017, 17, 1888. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Kim, M.; Lee, Y.; Lee, H.S.; Ko, H. Fingertip skin-inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv. 2015, 1, e1500661. [Google Scholar] [CrossRef] [PubMed]
- Enz, C.-C.; Temes, G.-C. Circuit Techniques for Reducing the Effects of Op-Amp Imperfections: Autozeroing, Correlated Double Sampling, and Chopper Stabilization. Proc. IEEE 1996, 84, 1584–1614. [Google Scholar] [CrossRef]
- Massarotto, M.; Carlosena, A.; Lopez-Martin, A.J. Two-stage differential charge and transresistance amplifiers. IEEE Trans. Instrum. Meas. 2008, 65, 418–426. [Google Scholar] [CrossRef]
- Nichols, W. Clinical measurement of arterial stiffness obtained from noninvasive pressure waveforms. Am. J. Hypertens. 2005, 18, 3S–10S. [Google Scholar] [CrossRef] [PubMed]
- Cournand, A.; Motley, H.; Werko, L.; Richards, J.R.D. Physiological studies of the effects of intermittent positive pressure breathing on cardiac output in man. Am. J. Physiol. 1947, 152, 162174. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, J.; Li, Y.; Shi, G. High-performance strain sensors with fishscale-like graphene-sensing layers for fullrange detection of human motions. ACS Nano 2016, 10, 7901–7906. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Gu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals. Adv. Mater. 2014, 26, 1336–1342. [Google Scholar] [CrossRef] [PubMed]
- Fontana, J.; Sazonov, E. Wearable Sensors, 1st ed.; Sazonov, E., Neuman, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2014; Volume 7, pp. 599–600. [Google Scholar]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 6, 2345–2352. [Google Scholar] [CrossRef] [PubMed]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Najafabadi, A.; Futaba, D.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Mishra, S.; Norton, J.; Lee, Y.; Lee, D.S.; Agee, N.; Chen, Y.; Chun, Y.; Yeo, W.-H. Soft, conformal bioelectronics for a wireless human-wheelchair interface. Biosens. Bioelectron. 2017, 91, 796–803. [Google Scholar] [CrossRef] [PubMed]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-W.; Lee, Y.; Park, J.; Kim, S.; Chae, H.; Ko, H.; Kim, J.J. A Triple-Mode Flexible E-Skin Sensor Interface for Multi-Purpose Wearable Applications. Sensors 2018, 18, 78. https://doi.org/10.3390/s18010078
Kim S-W, Lee Y, Park J, Kim S, Chae H, Ko H, Kim JJ. A Triple-Mode Flexible E-Skin Sensor Interface for Multi-Purpose Wearable Applications. Sensors. 2018; 18(1):78. https://doi.org/10.3390/s18010078
Chicago/Turabian StyleKim, Sung-Woo, Youngoh Lee, Jonghwa Park, Seungmok Kim, Heeyoung Chae, Hyunhyub Ko, and Jae Joon Kim. 2018. "A Triple-Mode Flexible E-Skin Sensor Interface for Multi-Purpose Wearable Applications" Sensors 18, no. 1: 78. https://doi.org/10.3390/s18010078
APA StyleKim, S.-W., Lee, Y., Park, J., Kim, S., Chae, H., Ko, H., & Kim, J. J. (2018). A Triple-Mode Flexible E-Skin Sensor Interface for Multi-Purpose Wearable Applications. Sensors, 18(1), 78. https://doi.org/10.3390/s18010078