Smartphone-Based Cooperative Indoor Localization with RFID Technology


Abstract

1. Introduction
1.1. Smartphone-Based Indoor Localization
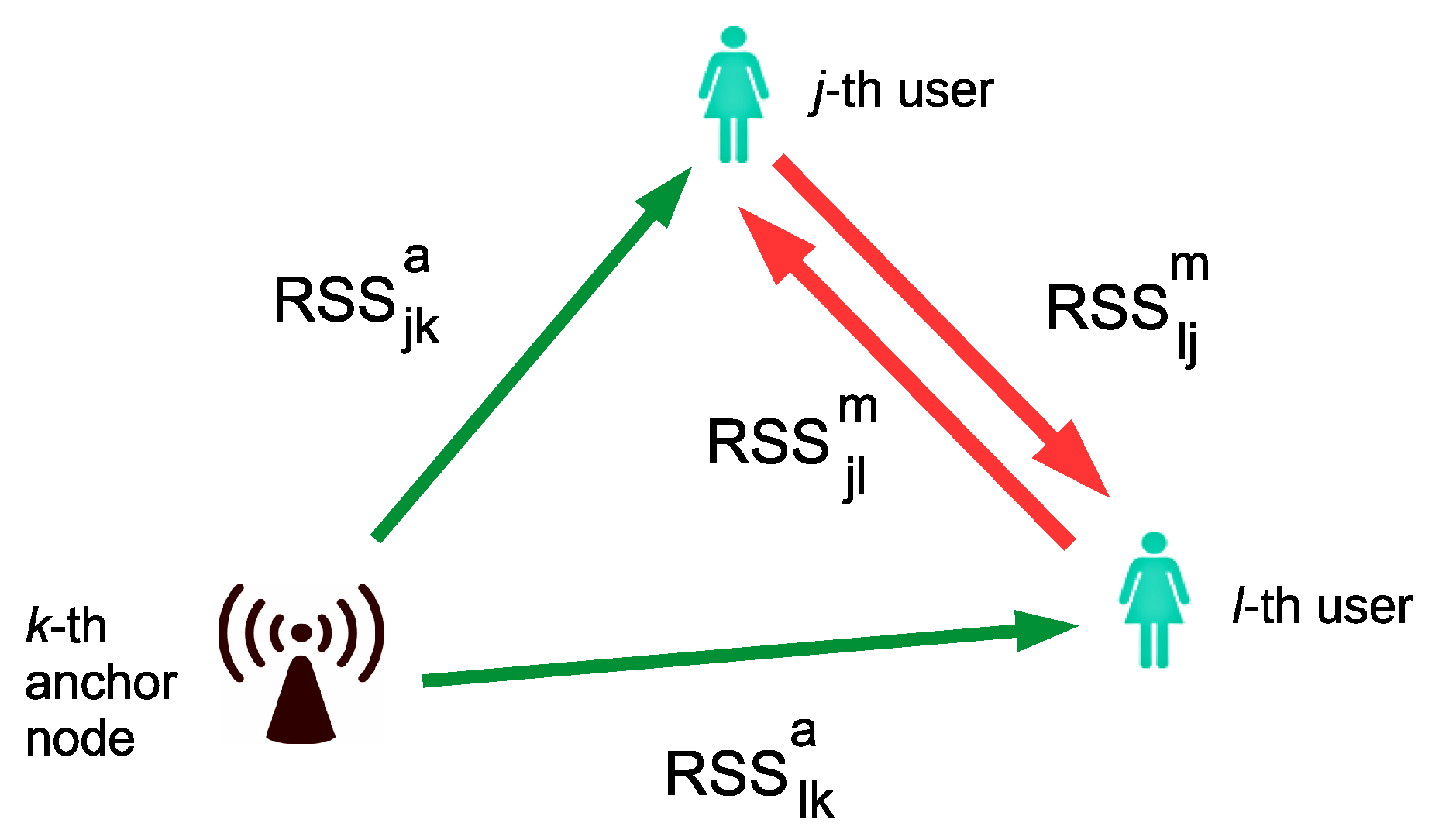
1.2. Cooperative Localization
2. Theory
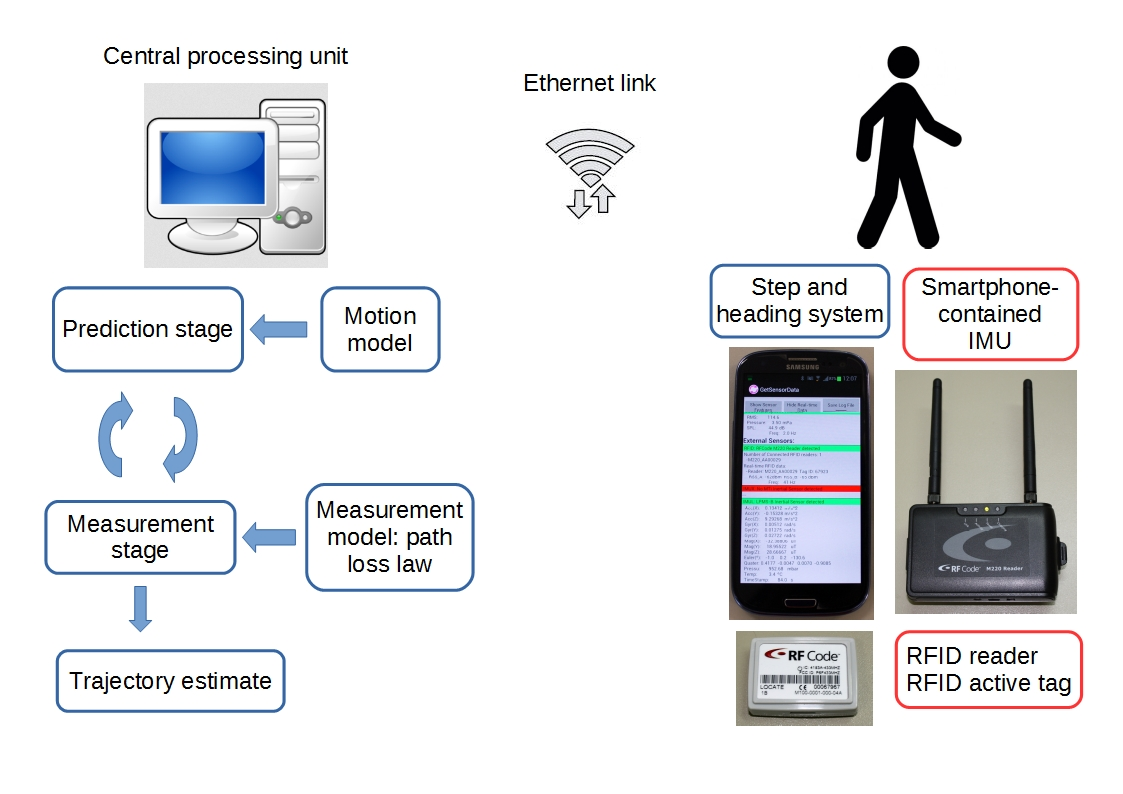
2.1. Bayesian Cooperative Estimation
2.2. Choice of the State Vector
2.3. Measurement Model
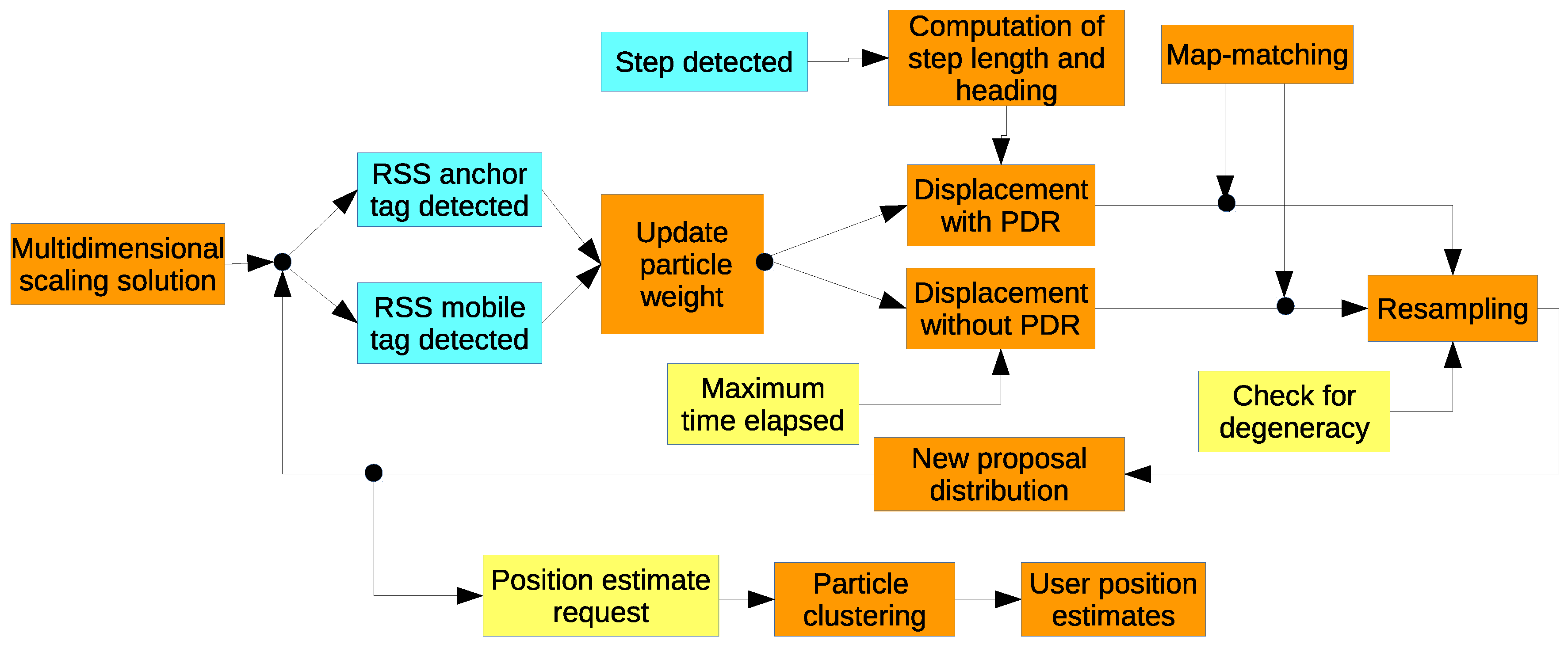
2.4. Update Stage
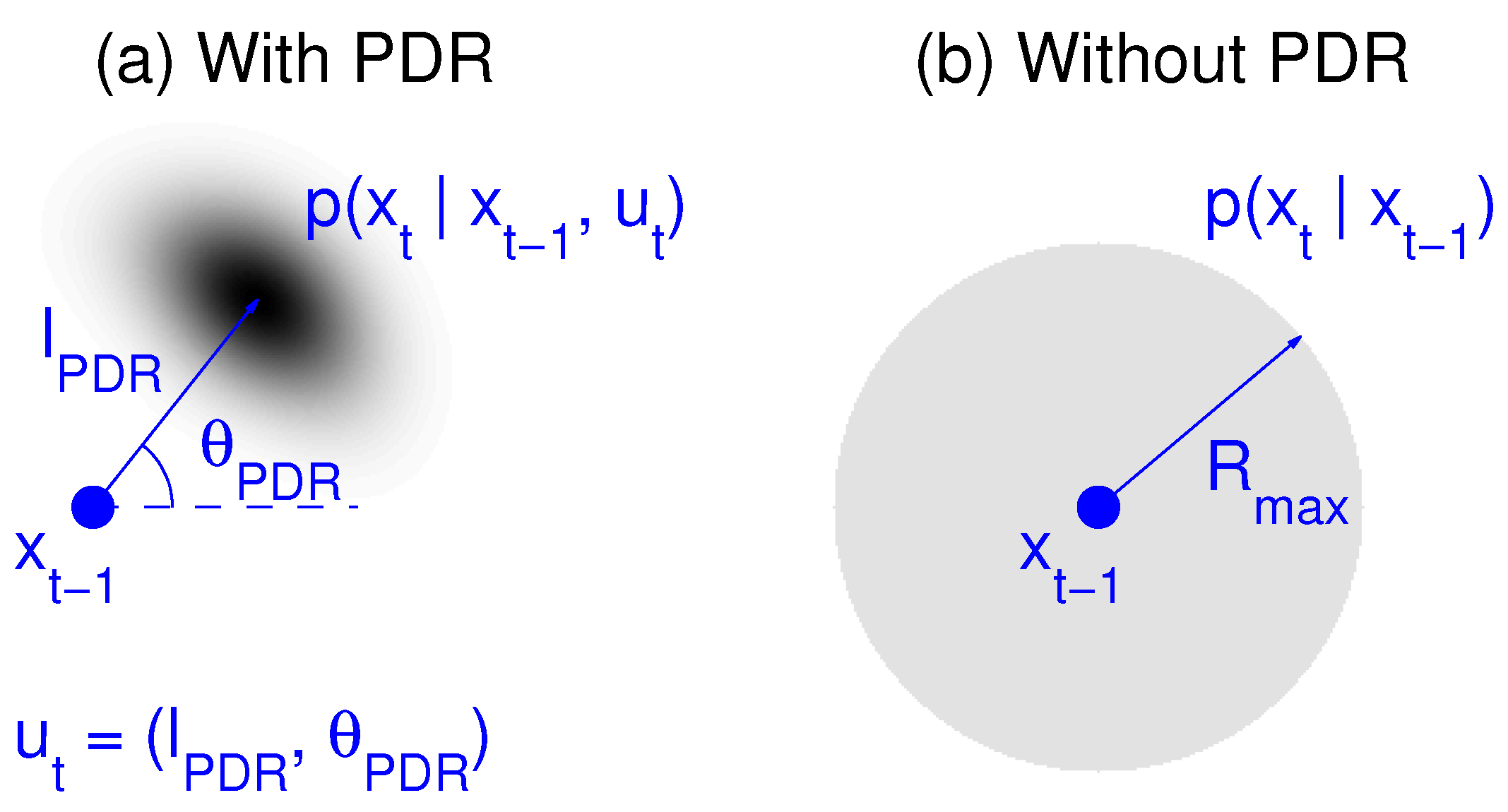
2.5. Particle Motion and Resampling
2.6. Map Matching on Particle Displacement
2.7. Particle Clustering and Position Estimate
- Find particle with the highest weight.
- Determine which particles are at a range less than the cluster radius (taken as 3 m in this work) from the particle with the highest weight.
- (If map matching is used,) exclude those particles within the cluster radius but without direct line of sight to the particle with the highest weight.
- Compute the MMSE of the particles satisfying these conditions, and the cluster weight (sum of the weights of all particles in the cluster).
- Eliminate those particles and go to step (1) to process the next cluster.
- The position is given by MMSE of the cluster with the largest weight.
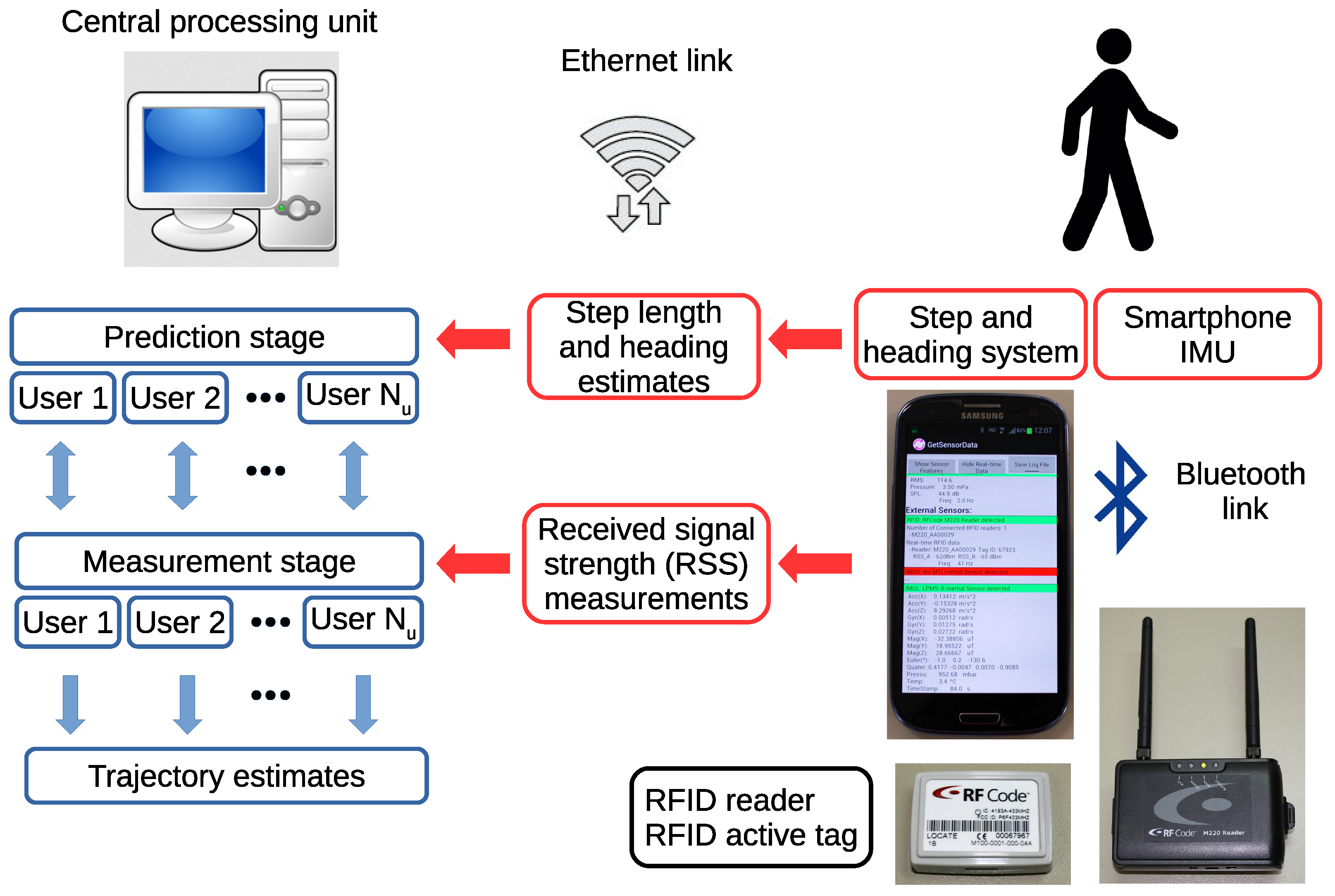
3. Experimental Device
4. Experimental Results and Discussion
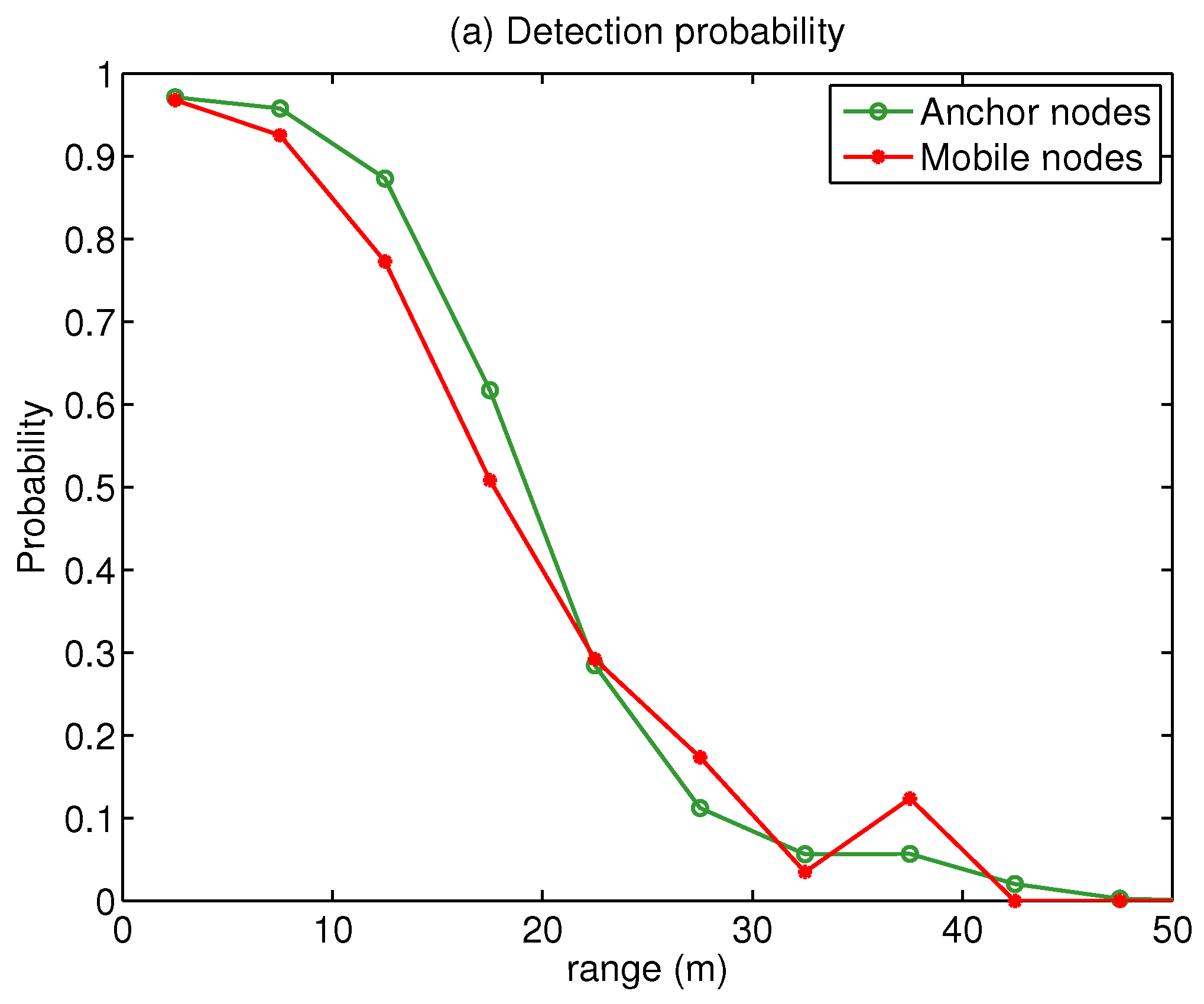
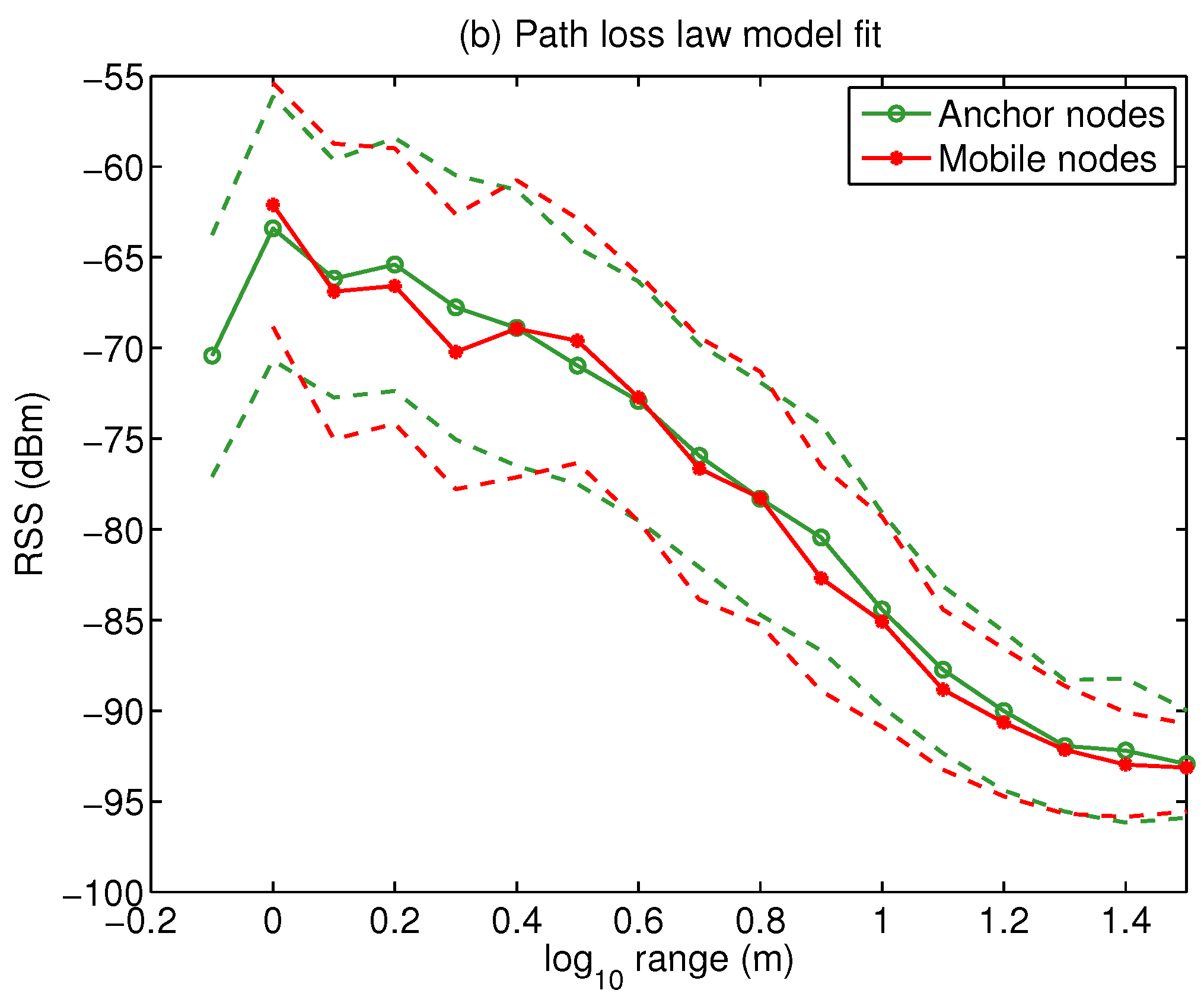
4.1. Calibration
4.2. Smartphone-Based Pedestrian Reckoning
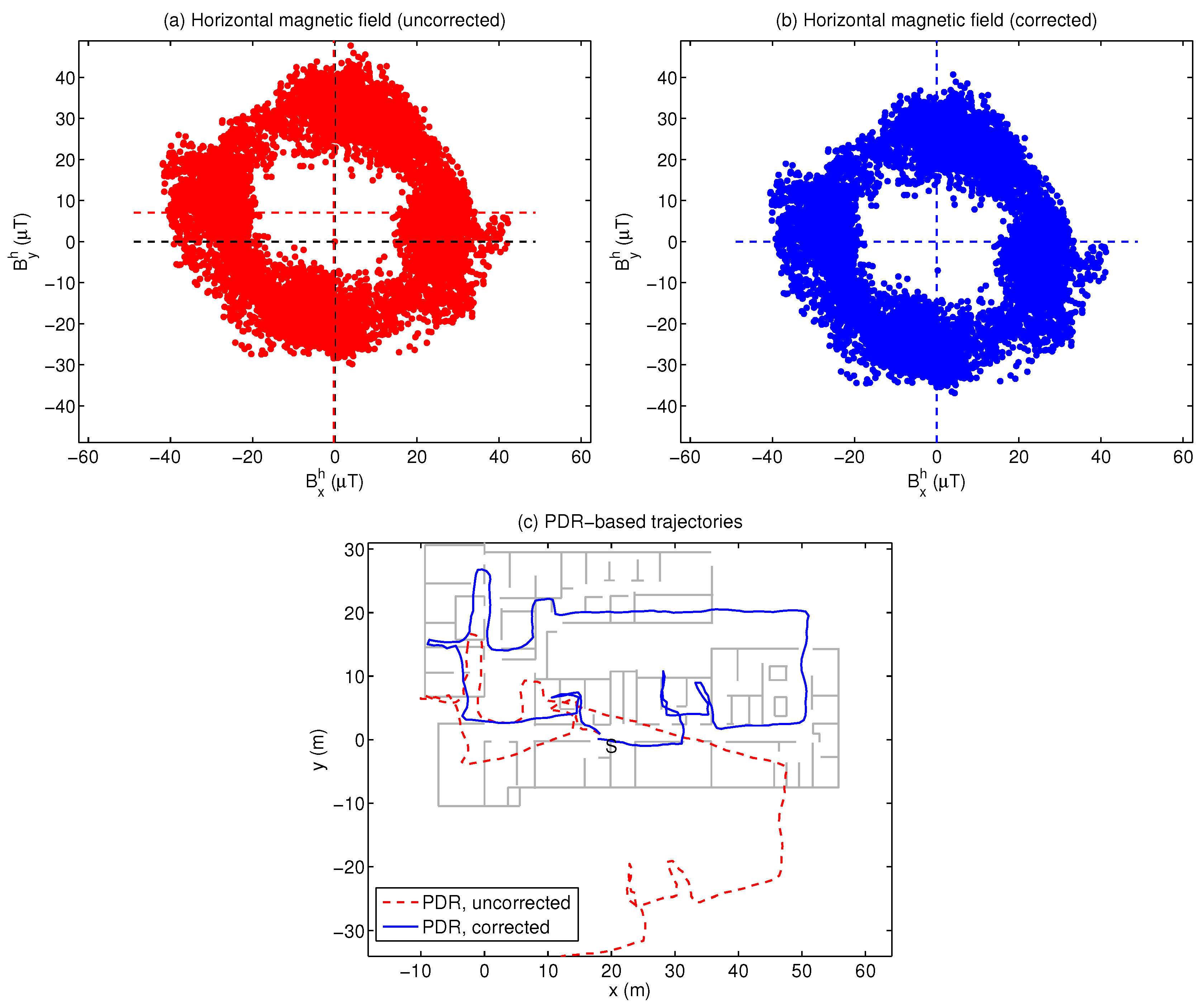
4.3. Correction of Soft- and Hard-Iron Disturbances
- Estimate the tilt of the phone from the relative orientation of the gravity vector with respect to the accelerometer axes, and compute the projection of the magnetic field on the horizontal plane: .
- Perform a linear squares fit of the data to an ellipse of the general form:to determine the ellipse’s center , semi-major and semi-minor axes , and angle of rotation .
- The hard-iron effect is compensated by substracting from the data.
- The soft-iron effect is compensated by (a) rotating the (centered) ellipse by angle , so its axes become aligned with the -axes; (b) multiplying the minor axis by factor , and (c) rotating the ellipse back to its original orientation by angle .
- The corrected heading for each step can now be computed as .
4.4. Filter Initialization
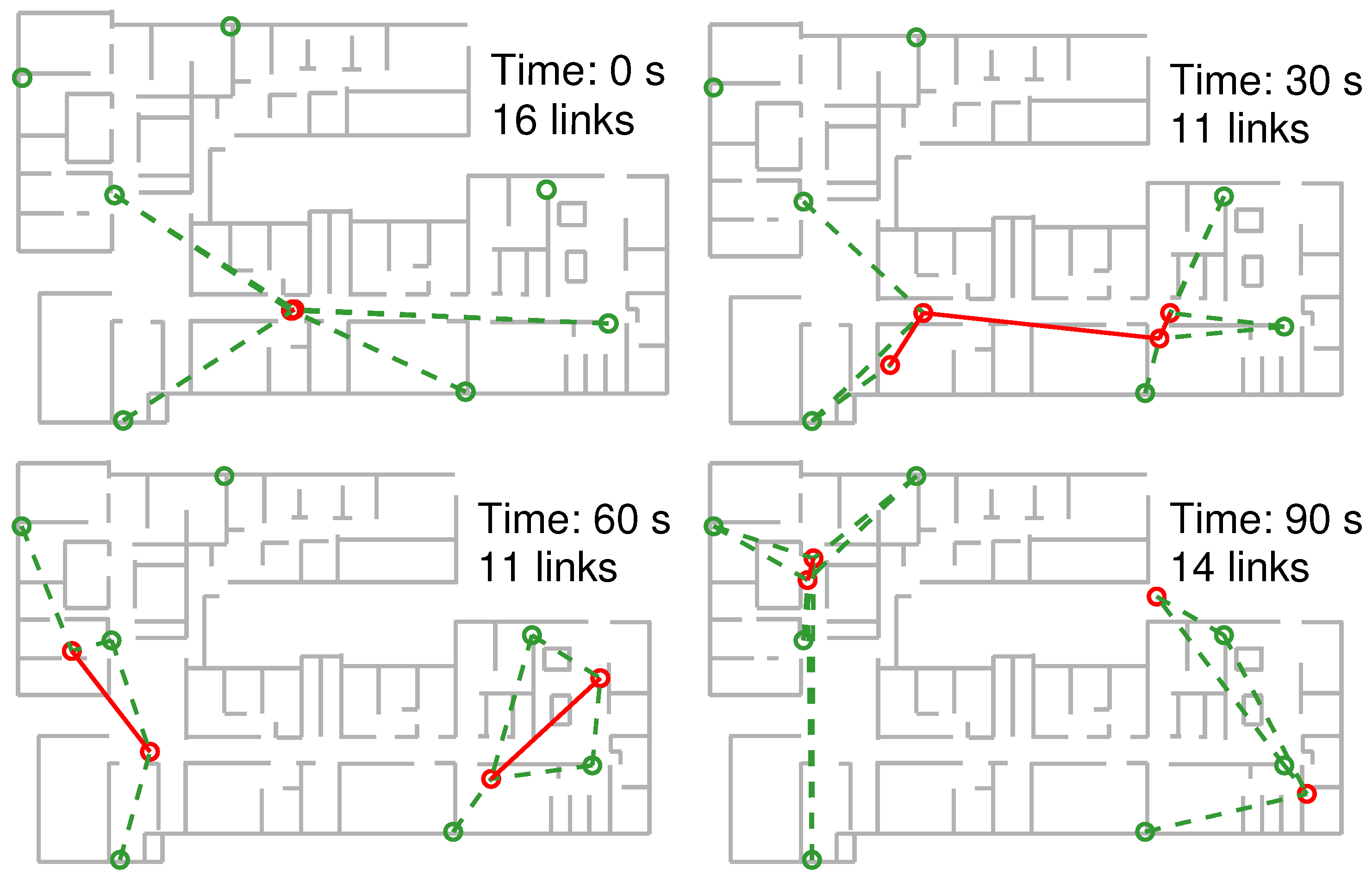
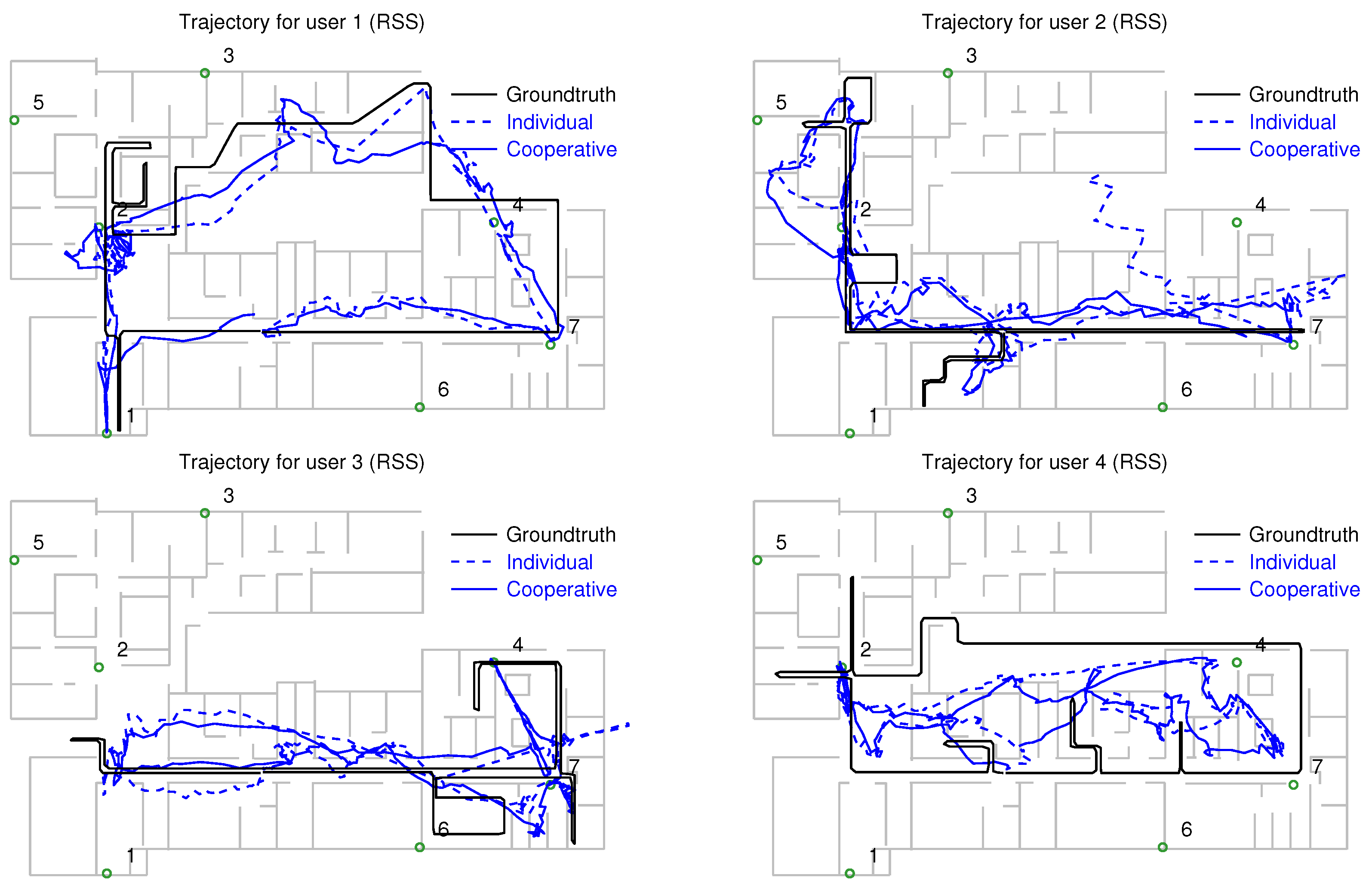
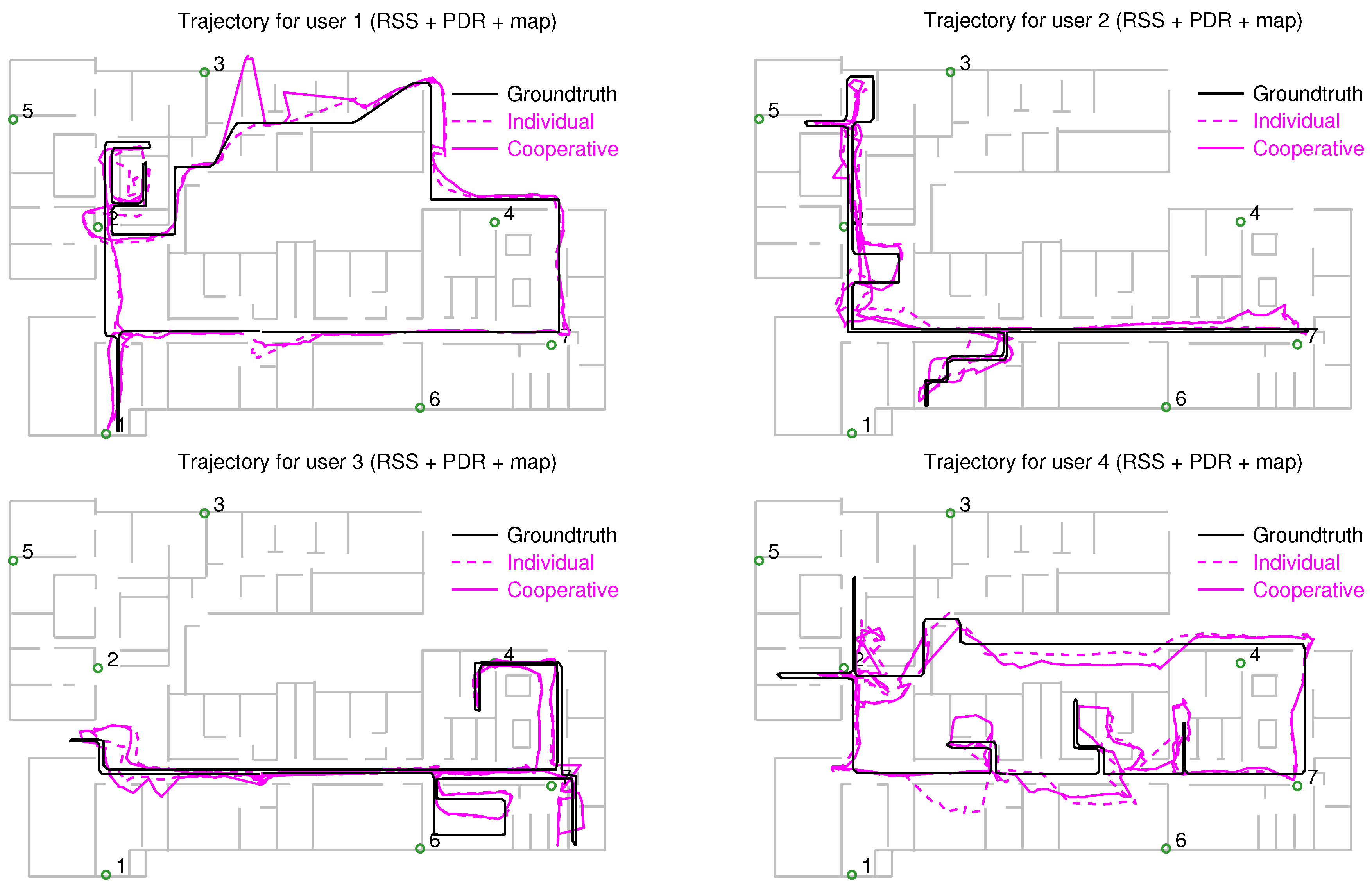
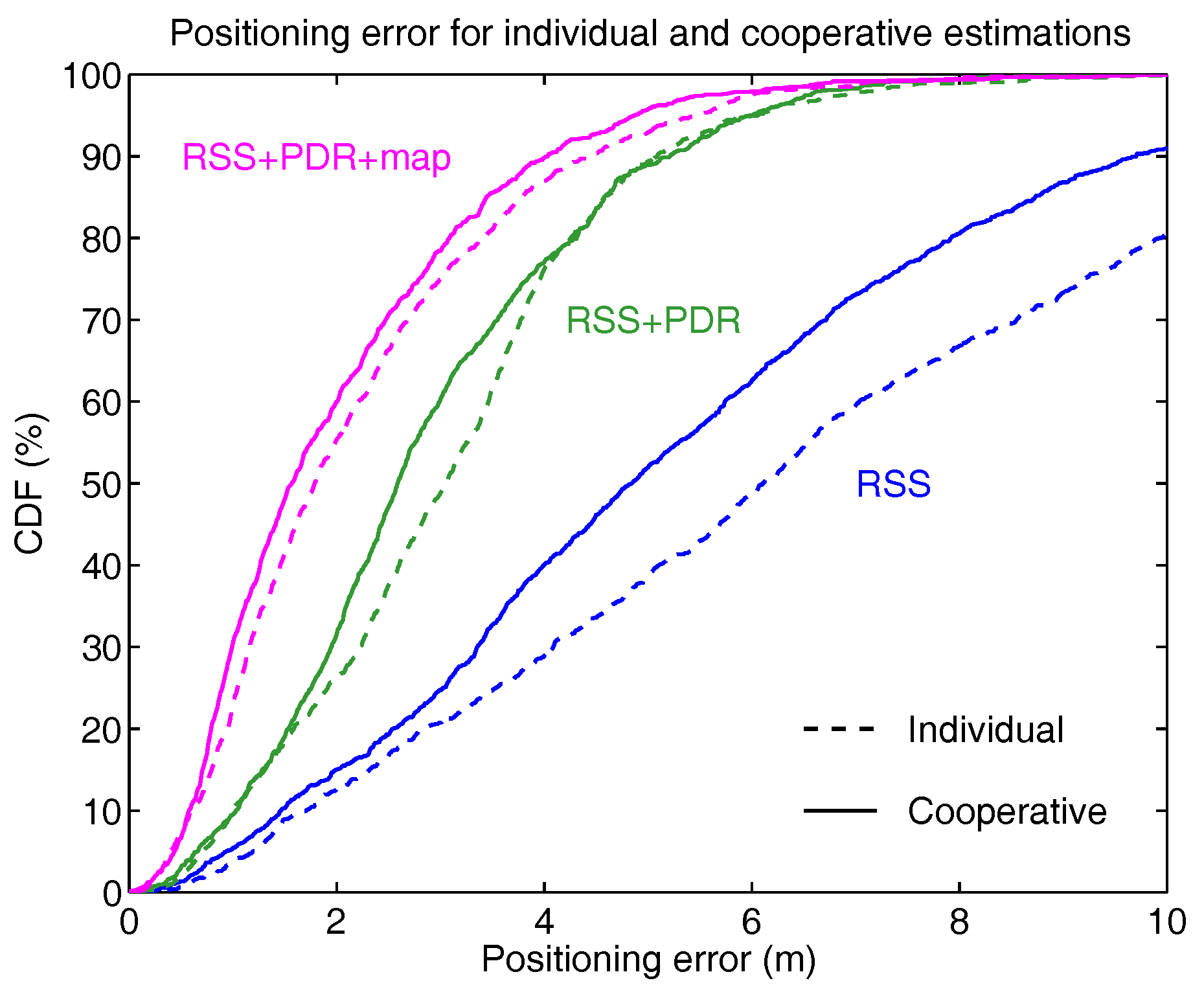
4.5. Positioning Results
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice and Advances; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Kos, A.; Tomažič, S.; Umek, A. Evaluation of smartphone inertial sensor performance for cross-platform mobile applications. Sensors 2016, 16, 477. [Google Scholar] [CrossRef] [PubMed]
- Skog, I.; Handel, P.; Nilsson, J.O.; Rantakokko, J. Zero-Velocity Detection—An Algorithm Evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Beauregard, S.; Klepal, M. Indoor PDR performance enhancement using minimal map information and particle filters. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 141–147. [Google Scholar]
- Pei, L.; Guinness, R.; Chen, R.; Liu, J.; Kuusniemi, H.; Chen, Y.; Chen, L.; Kaistinen, J. Human behavior cognition using smartphone sensors. Sensors 2013, 13, 1402–1424. [Google Scholar] [CrossRef] [PubMed]
- Mourcou, Q.; Fleury, A.; Franco, C.; Klopcic, F.; Vuillerme, N. Performance evaluation of smartphone inertial sensors measurement for range of motion. Sensors 2015, 15, 23168–23187. [Google Scholar] [CrossRef] [PubMed]
- Davidson, P.; Piché, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Tian, Q.; Salcic, Z.; Wang, K.I.K.; Pan, Y. A hybrid indoor localization and navigation system with map matching for pedestrians using smartphones. Sensors 2015, 15, 30759–30783. [Google Scholar] [CrossRef] [PubMed]
- Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.; et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors 2017, 17, 557. [Google Scholar] [CrossRef] [PubMed]
- Patwari, N.; Ash, J.; Kyperountas, S.; Hero, A.; Moses, R.; Correal, N. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Li, X. Collaborative localization with received-signal strength in wireless sensor networks. IEEE Trans. Veh. Technol. 2007, 56, 3807–3817. [Google Scholar]
- Ouyang, R.W.; Wong, A.K.S.; Lea, C.T. Received signal strength-based wireless localization via semidefinite programming: Noncooperative and cooperative schemes. IEEE Trans. Veh. Technol. 2010, 59, 1307–1318. [Google Scholar] [CrossRef]
- Ji, X.; Zha, H. Sensor positioning in wireless ad-hoc sensor networks using multidimensional scaling. In Proceedings of the 23rd Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM), Hong Kong, China, 7–11 March 2004; Volume 4, pp. 2652–2661. [Google Scholar]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House: London, UK, 2004. [Google Scholar]
- Fetzer, T.; Ebner, F.; Deinzer, F.; Köping, L.; Grzegorzek, M. On Monte Carlo smoothing in multi sensor indoor localisation. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Knauth, S.; Koukofikis, A. Smartphone positioning in large environments by sensor data fusion, particle filter and FCWC. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–5. [Google Scholar]
- Win, M.Z.; Conti, A.; Mazuelas, S.; Shen, Y.; Gifford, W.M.; Dardari, D.; Chiani, M. Network localization and navigation via cooperation. IEEE Commun. Mag. 2011, 49, 56–62. [Google Scholar] [CrossRef]
- Olsson, F.; Rantakokko, J.; Nygards, J. Cooperative localization using a foot-mounted inertial navigation system and ultrawideband ranging. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 122–131. [Google Scholar]
- Sathyan, T.; Hedley, M. Fast and accurate cooperative tracking in wireless networks. IEEE Trans. Mob. Comput. 2013, 12, 1801–1813. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A.R.; Zheng, X. RFID-based centralized cooperative localization. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle Filters for Positioning, Navigation, and Tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W. A Robust Crowdsourcing-Based Indoor Localization System. Sensors 2017, 17, 864. [Google Scholar] [CrossRef] [PubMed]
- Seco, F.; Plagemann, C.; Jiménez, A.; Burgard, W. Improving RFID-based indoor positioning accuracy using Gaussian processes. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–8. [Google Scholar]
- Seidel, S.Y.; Rappaport, T.S. 914 MHz Path Loss prediction models for indoor wireless communications in multifloored buildings. IEEE Trans. Antennas Propag. 1992, 40, 207–217. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of Pedestrian Dead-Reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing (WISP), Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Li, T.; Sun, S.; Sattar, T.P.; Corchado, J.M. Fight sample degeneracy and impoverishment in particle filters: A review of intelligent approaches. Expert Syst. Appl. 2014, 41, 3944–3954. [Google Scholar] [CrossRef]
- Borenstein, J.; Ojeda, L. Heuristic drift elimination for personnel tracking systems. J. Navig. 2010, 63, 591–606. [Google Scholar] [CrossRef]
- Cormen, T.H. Introduction to Algorithms, 3rd ed.; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Zampella, F.; Jiménez, A.R.; Seco, F. Indoor positioning using efficient map matching, RSS measurements, and an improved motion model. IEEE Trans. Veh. Technol. 2015, 64, 1304–1317. [Google Scholar] [CrossRef]
- Nievergelt, J.; Preparata, F.P. Plane-sweep algorithms for intersecting geometric figures. Commun. ACM 1982, 25, 739–747. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A.; Zampella, F. Joint Estimation of Indoor Position and Orientation from RF Signal Strength Measurements. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–8. [Google Scholar]
- Weinberg, H. Using the ADXL202 in pedometer and personal navigation applications. In Analog Devices AN-602 Application Note; Analog Devices: Norwood, MA, USA, 2002; Volume 2, pp. 1–6. [Google Scholar]
- Renaudin, V.; Susi, M.; Lachapelle, G. Step length estimation using handheld inertial sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Rosas, J.G. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Caruso, M.J. Applications of magnetic sensors for low cost compass systems. In Proceedings of the IEEE Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000; pp. 177–184. [Google Scholar]
- Moder, T.; Reitbauer, C.; Dorn, M.; Wieser, M. Calibration of Smartphone Sensor Data Usable for Pedestrian Dead Reckoning. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Konvalin, C. Compensating For Tilt, Hard-Iron and Soft-Iron Effects. Available online: https://www.sensorsmag.com/components/compensating-for-tilt-hard-iron-and-soft-iron-effects (accesssed on 11 October 2017).
- Gebre-Egziabher, D.; Elkaim, G.H.; David Powell, J.; Parkinson, B.W. Calibration of strapdown magnetometers in magnetic field domain. J. Aerosp. Eng. 2006, 19, 87–102. [Google Scholar] [CrossRef]
- Chitte, S.D.; Dasgupta, S.; Ding, Z. Distance Estimation From Received Signal Strength Under Log-Normal Shadowing: Bias and Variance. IEEE Signal Process. Lett. 2009, 16, 216–218. [Google Scholar] [CrossRef]
Sample Availability: The raw data files used for this work are freely available from the authors. |














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Localization | RSS | RSS+PDR | RSS+PDR | RSS+PDR+Map | ||||
|---|---|---|---|---|---|---|---|---|
| Method | (Uncorr. Compass) | (Corr. Compass) | ||||||
| Error | 50% | 90% | 50% | 90% | 50% | 90% | 50% | 90% |
| Individual | 6.1 m | 12.5 m | 4.0 m | 8.6 m | 3.1 m | 5.1 m | 1.8 m | 4.4 m |
| Cooperative | 4.9 m | 9.7 m | 3.5 m | 7.1 m | 2.6 m | 5.2 m | 1.6 m | 4.0 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seco, F.; Jiménez, A.R. Smartphone-Based Cooperative Indoor Localization with RFID Technology. Sensors 2018, 18, 266. https://doi.org/10.3390/s18010266
Seco F, Jiménez AR. Smartphone-Based Cooperative Indoor Localization with RFID Technology. Sensors. 2018; 18(1):266. https://doi.org/10.3390/s18010266
Chicago/Turabian StyleSeco, Fernando, and Antonio R. Jiménez. 2018. "Smartphone-Based Cooperative Indoor Localization with RFID Technology" Sensors 18, no. 1: 266. https://doi.org/10.3390/s18010266
APA StyleSeco, F., & Jiménez, A. R. (2018). Smartphone-Based Cooperative Indoor Localization with RFID Technology. Sensors, 18(1), 266. https://doi.org/10.3390/s18010266