Using Acceleration Data to Automatically Detect the Onset of Farrowing in Sows

Abstract
:1. Introduction
2. Materials and Methods
2.1. Animals and Housing
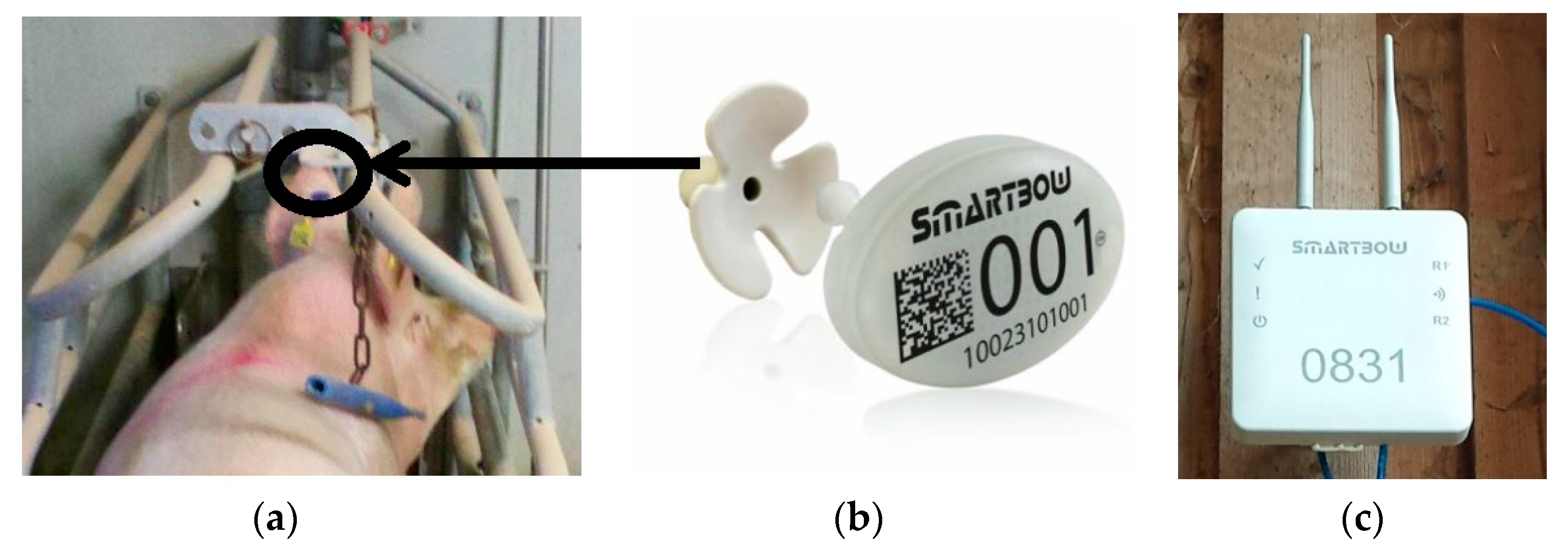
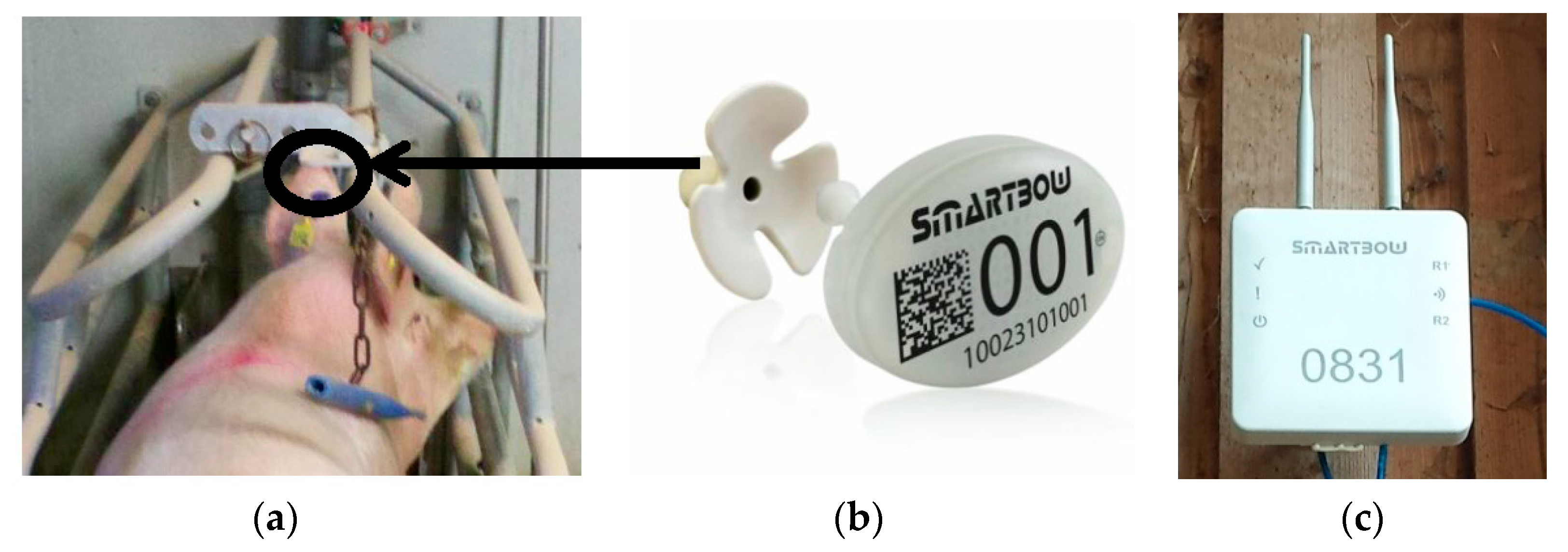
2.2. Sensor Systems
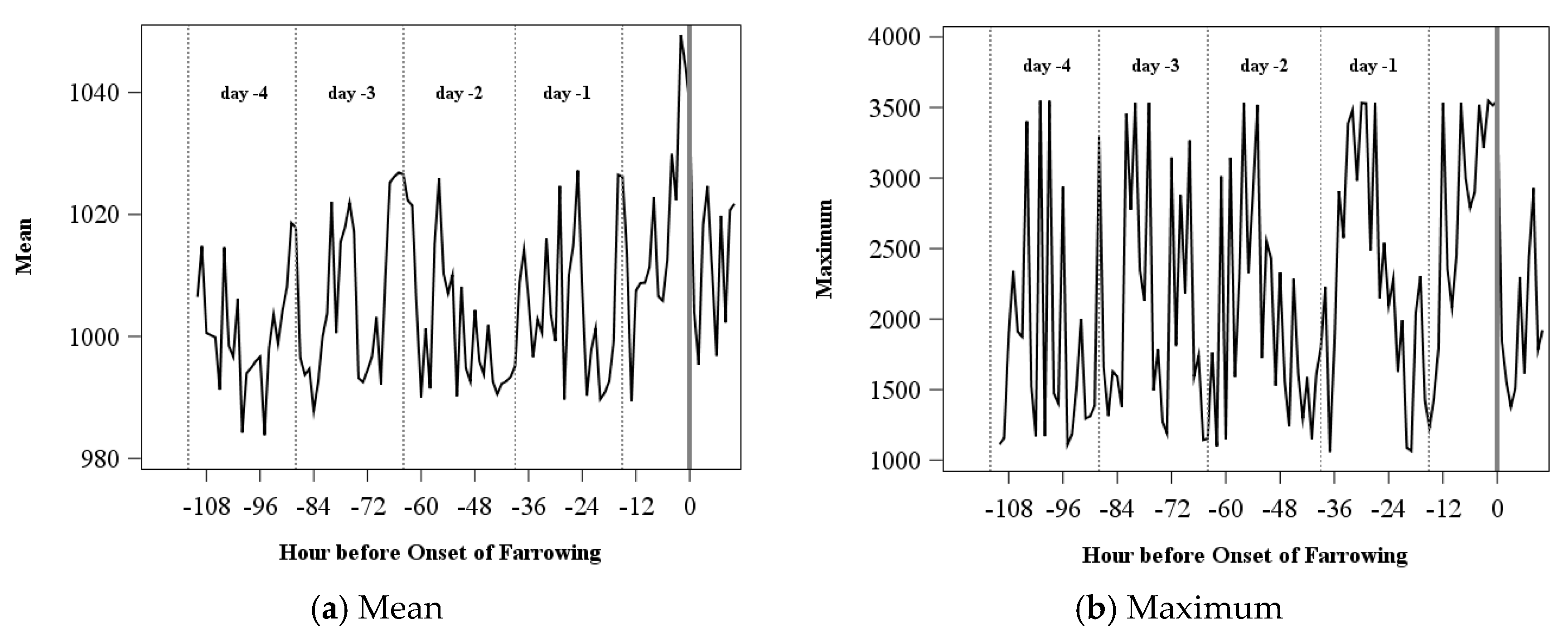
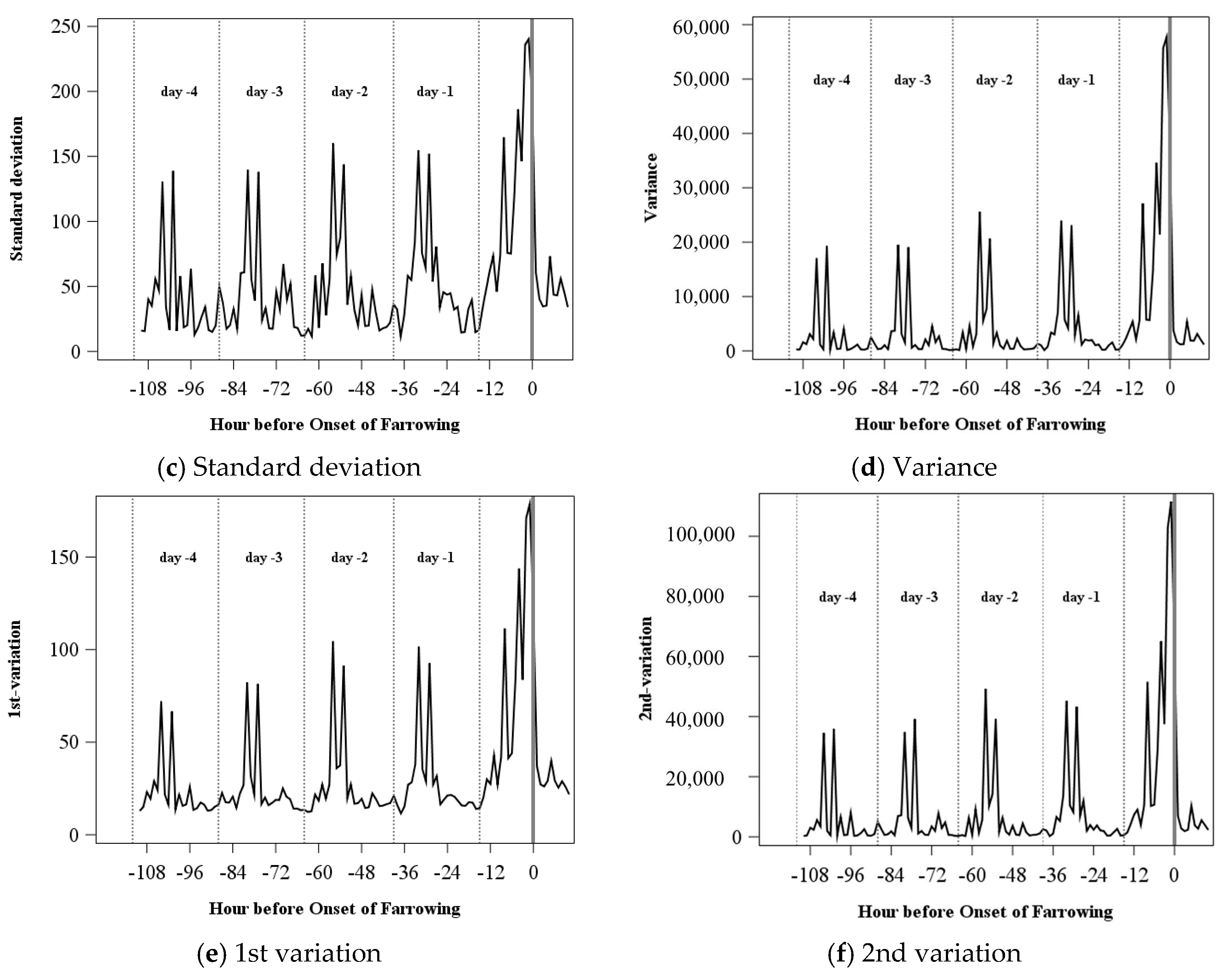
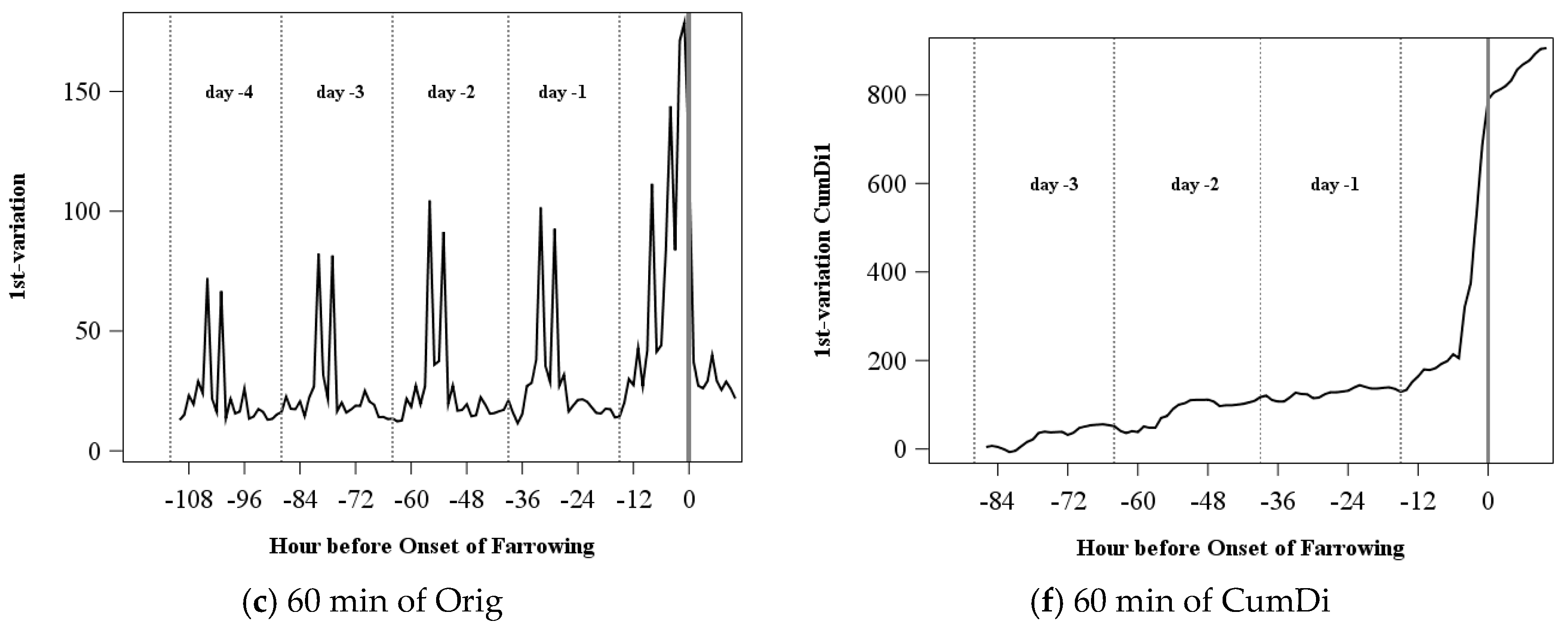
2.3. Acceleration Transformation Procedure
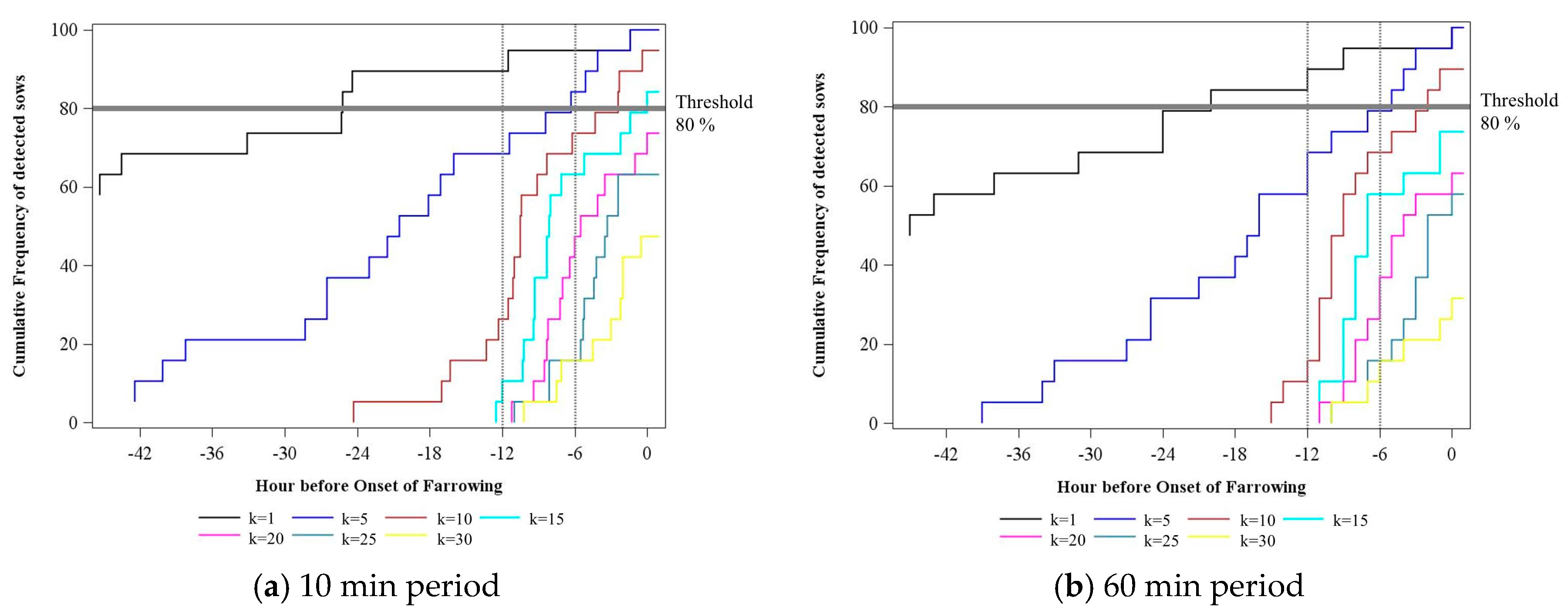
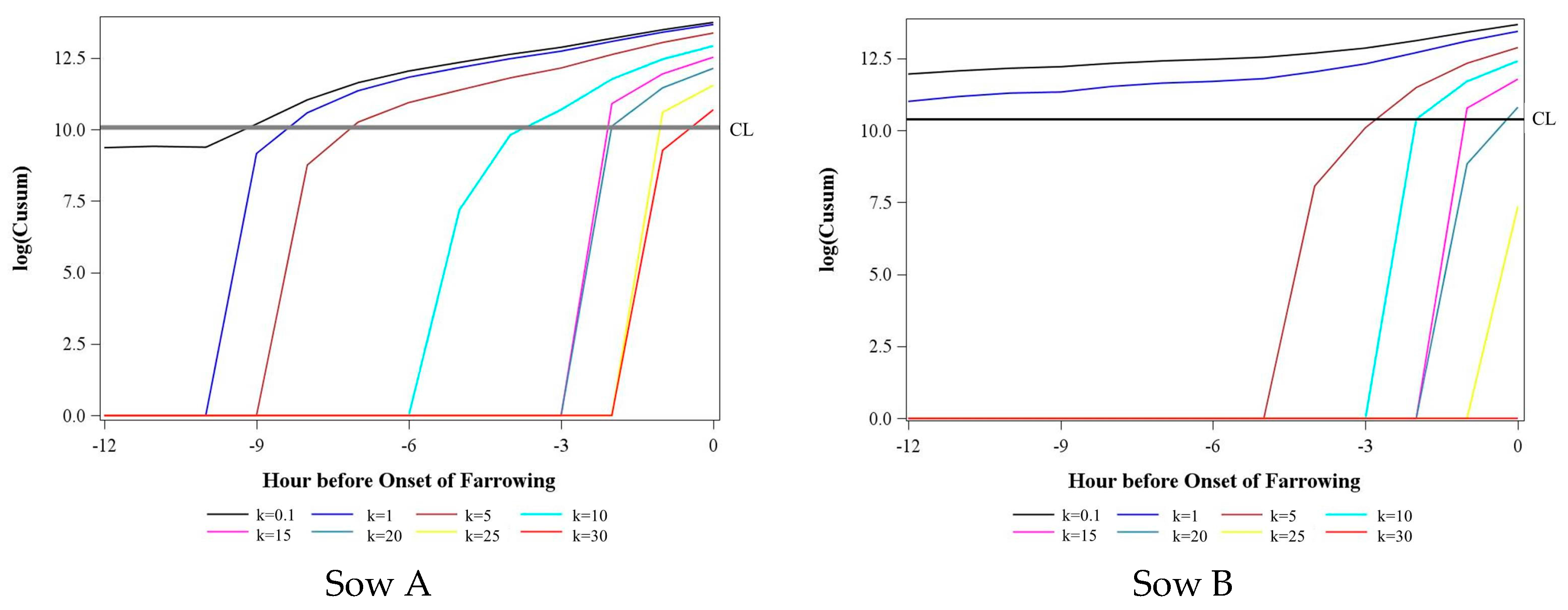
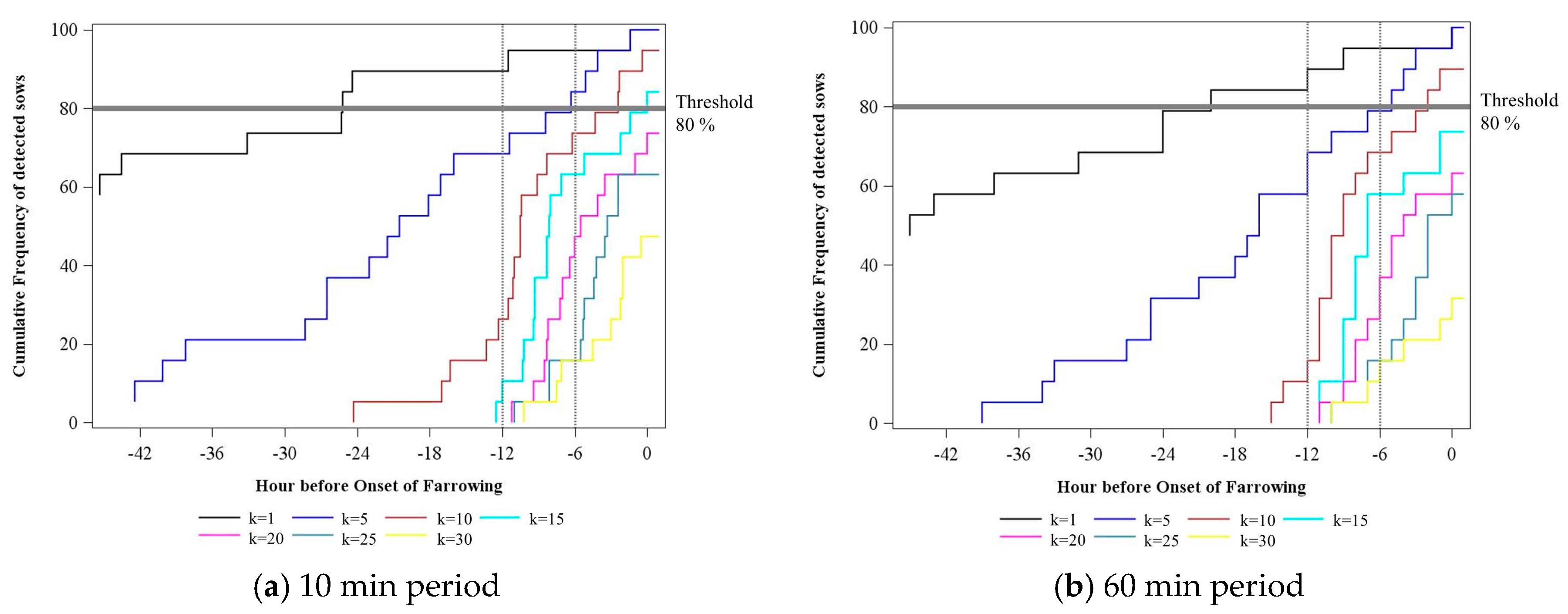
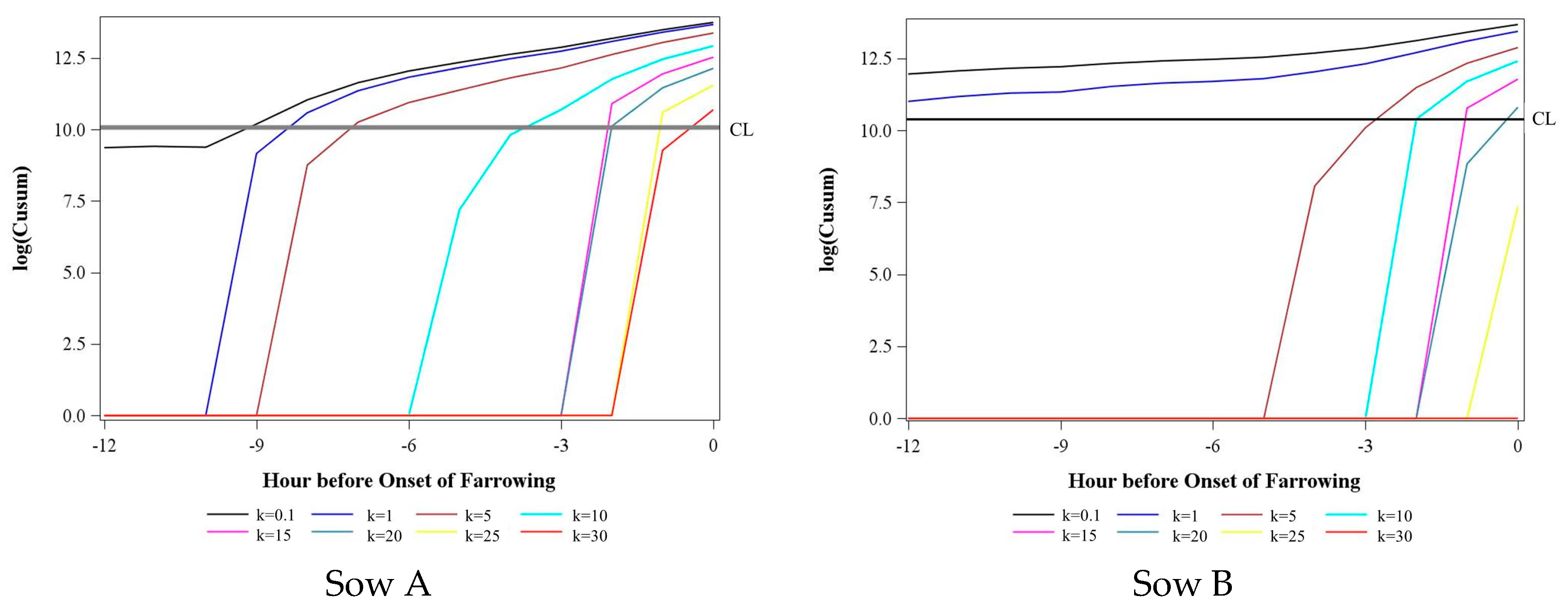
2.4. CUSUM Control Charts
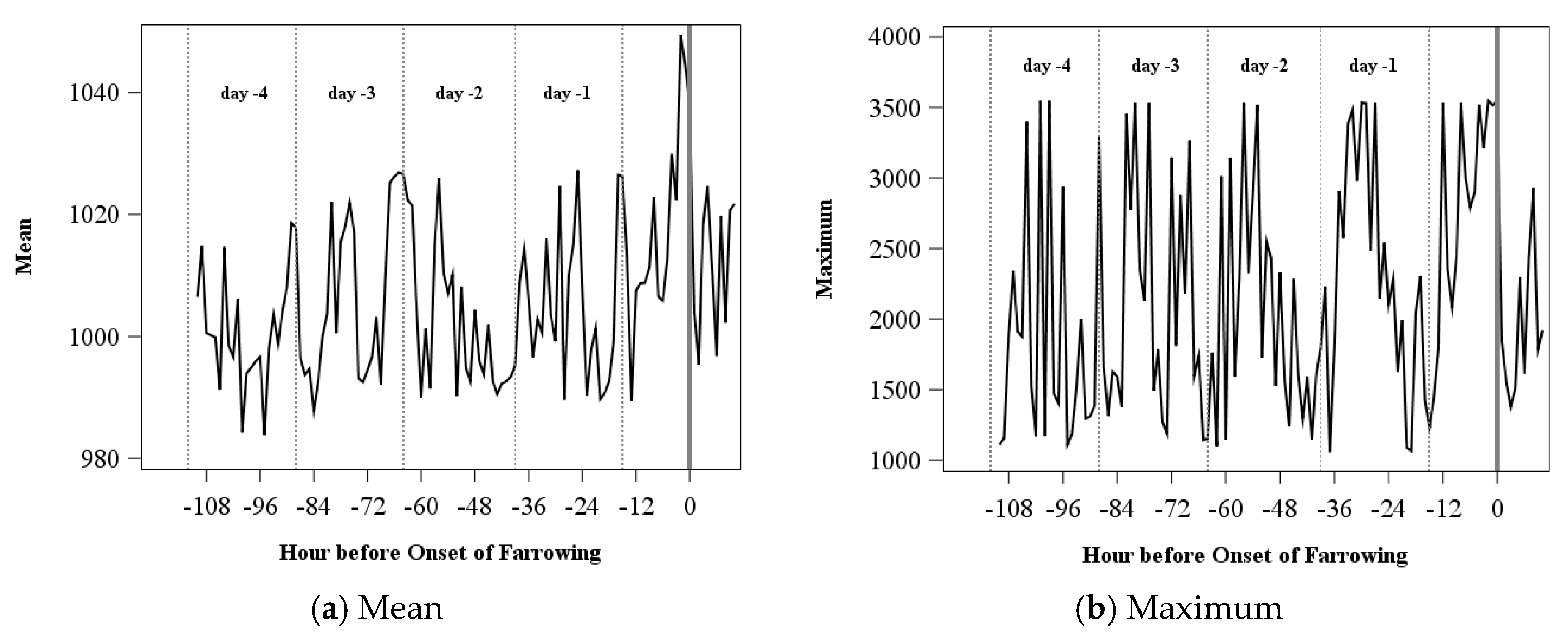
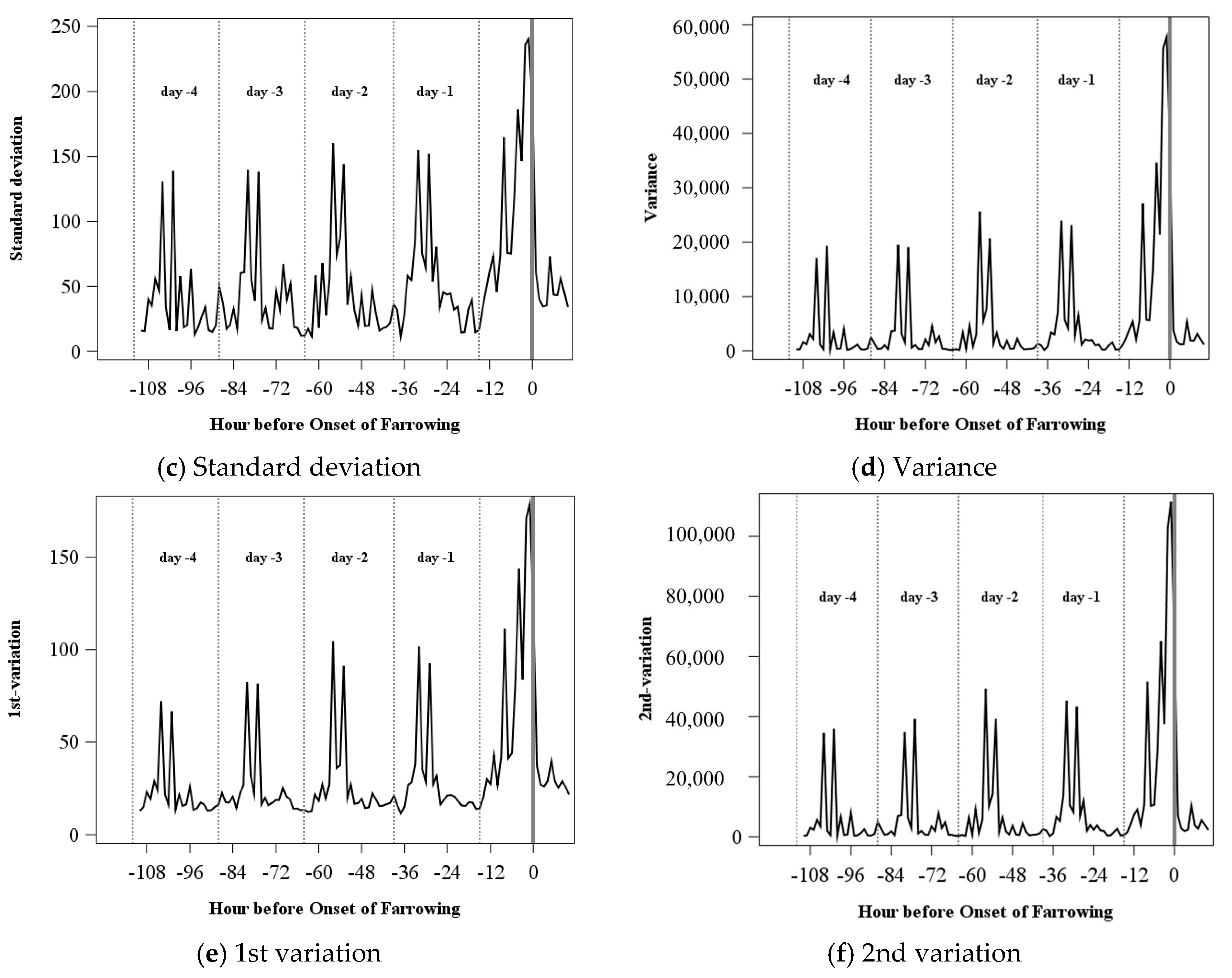
- Distribution characteristic: standard deviation, variance, and variation of 1st, 2nd, and 3rd order.
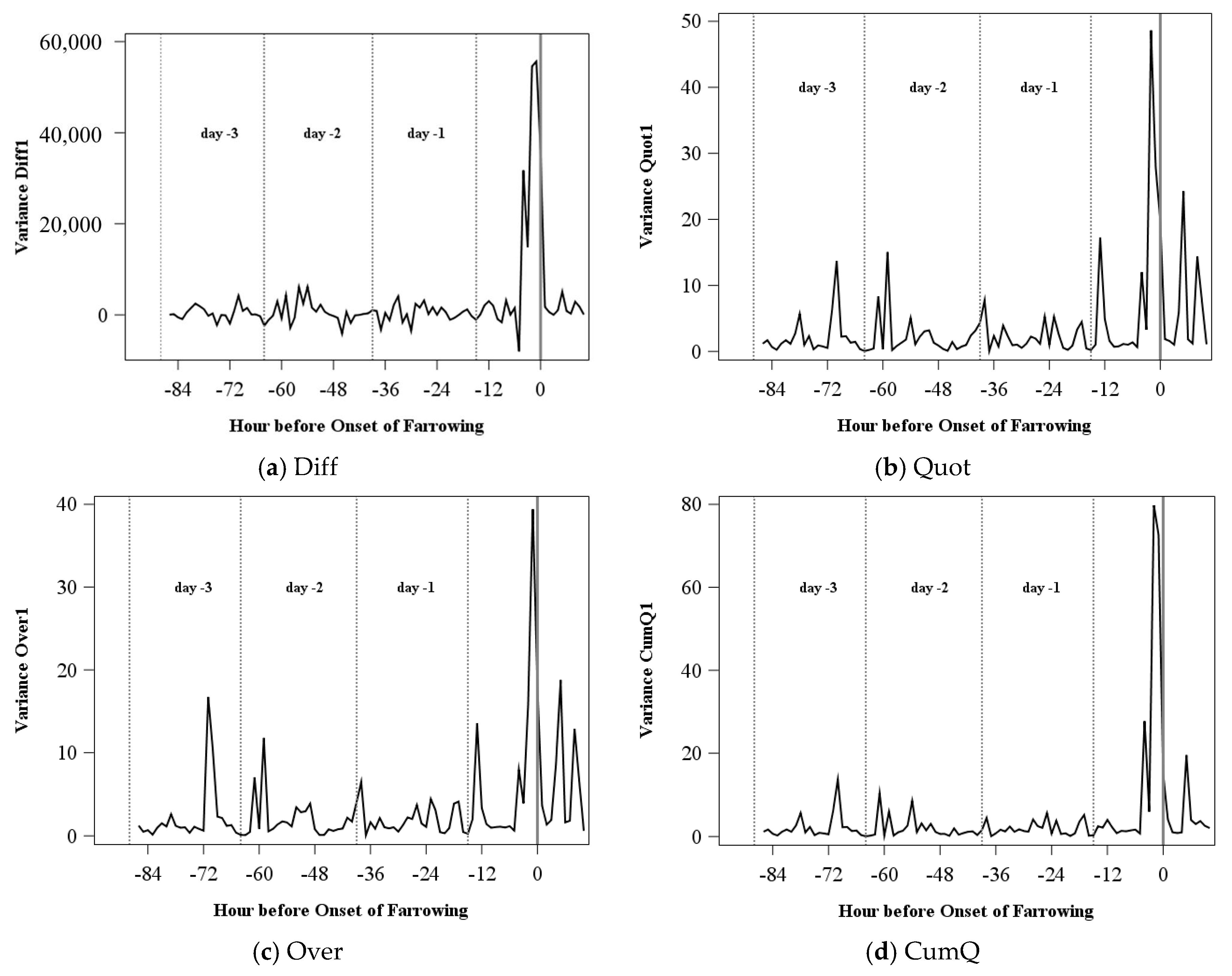
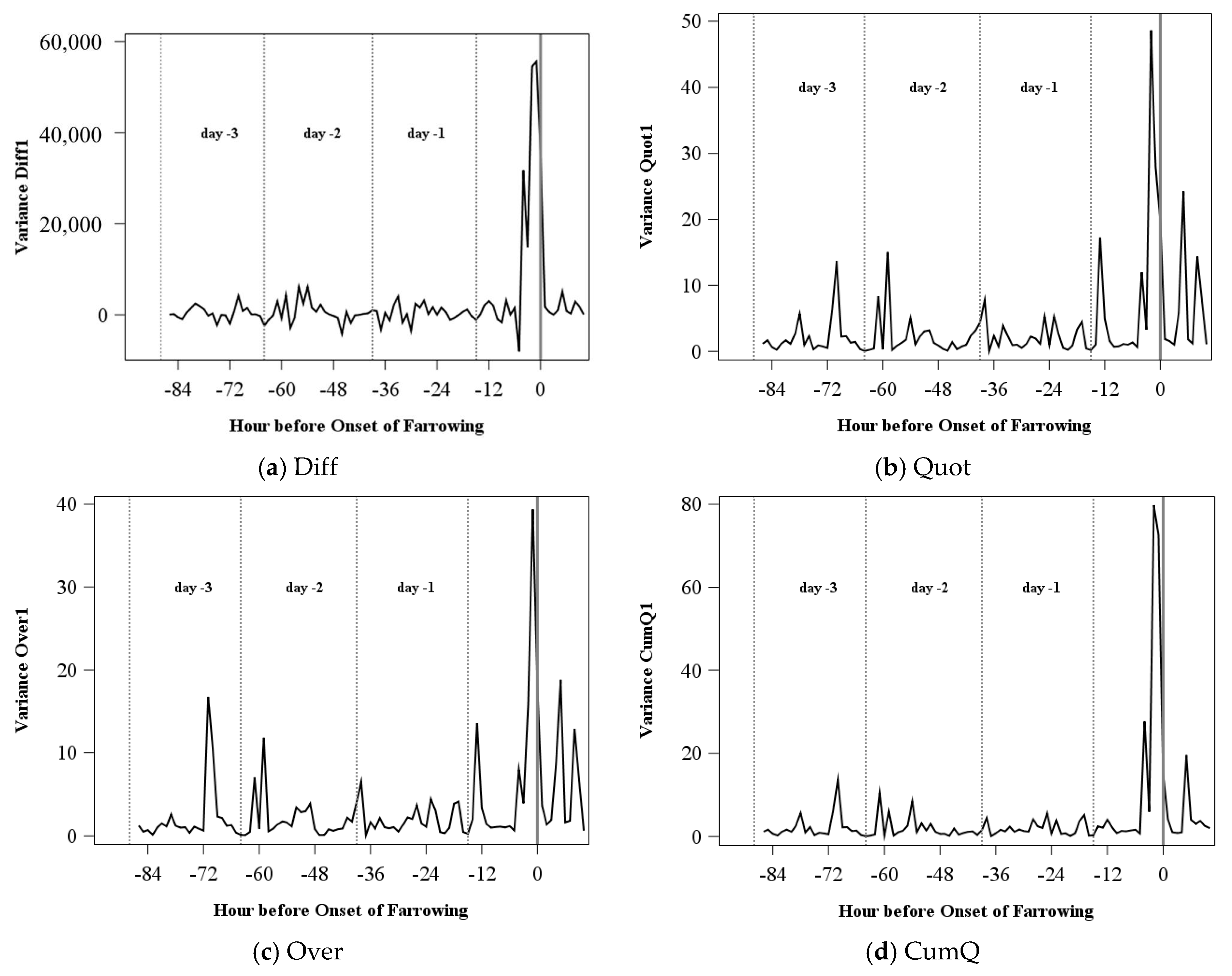
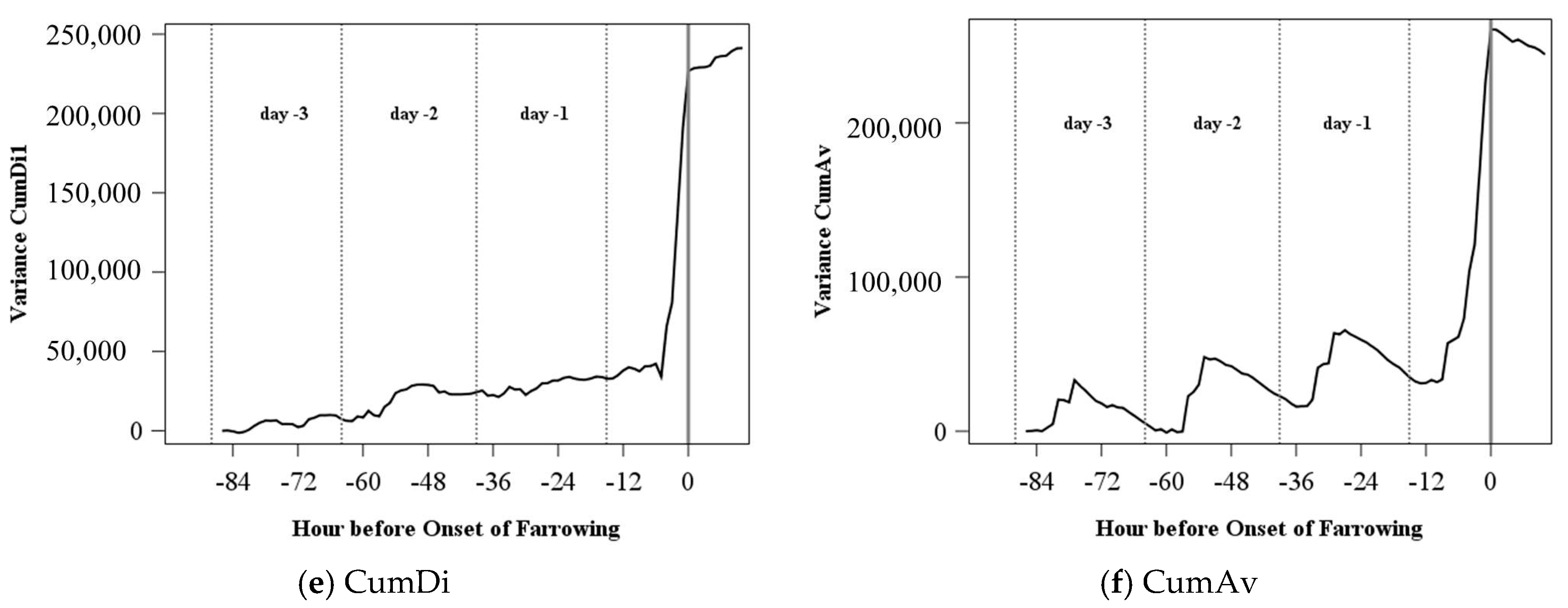
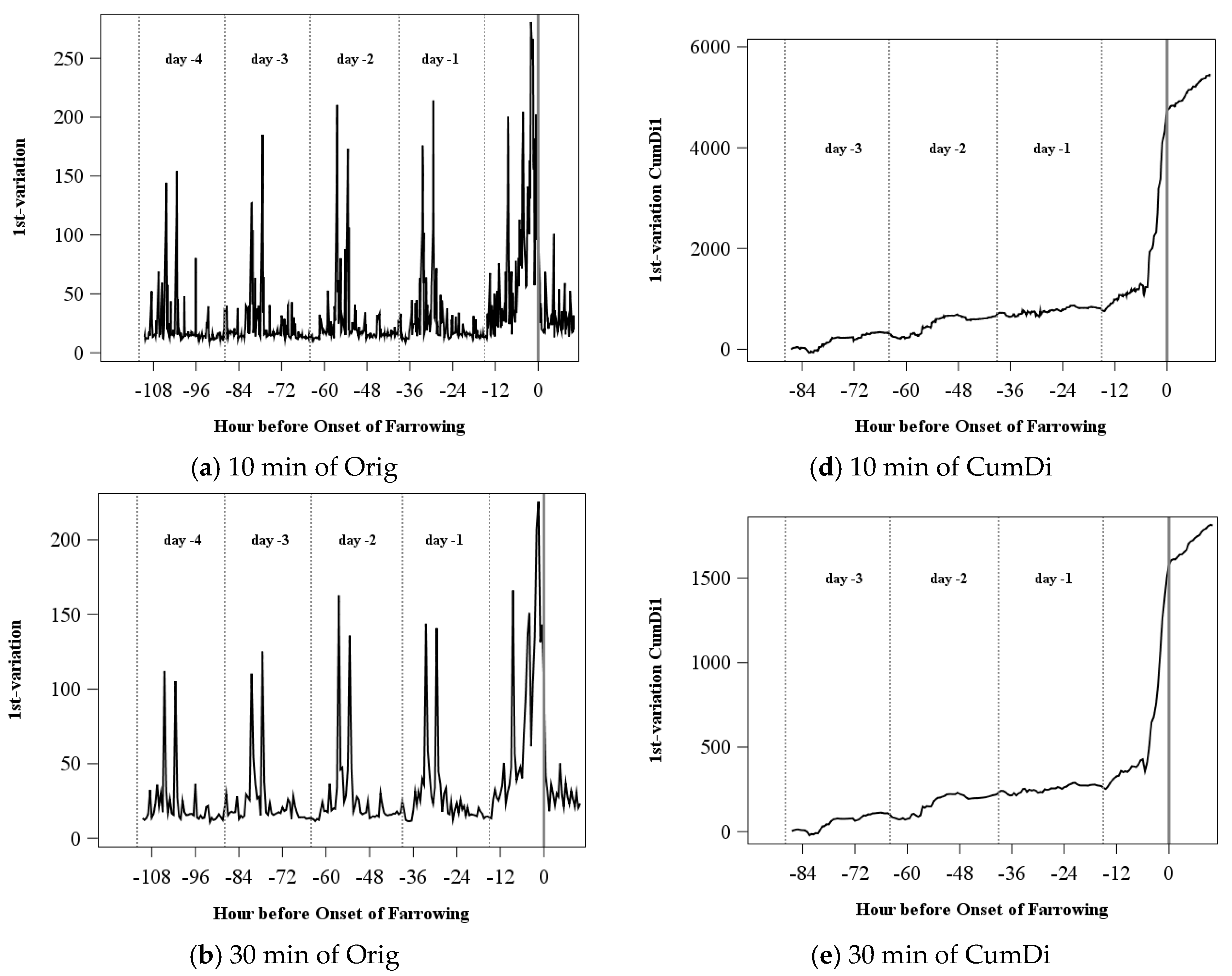
- Acceleration index: Orig, Diff, Quot, Over, CumDi, CumQ, CumAv.
- Time period: 10, 30, 60 min.
- Interval of moving average, depending on time period (10 min: 1, 5, 9, 13, 19, and 25; 30 min: 1, 3, 5, and 9; 60 min: 1, 3, and 5).
- Allowance value k: 0.1, 0.25, 0.5, 1, 1.5, … 12.5, 15, 20, 25, and 30.
- Smoothing value h: 4, …, 10.
- Parameterization period (Day −4, Day −5, and Days −4 and −5).
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Oliviero, C.; Kothe, S.; Heinonen, M.; Valros, A.; Peltoniemi, O. Prolonged duration of farrowing is associated with subsequent decreased fertility in sows. Theriogenology 2013, 79, 1095–1099. [Google Scholar] [CrossRef] [PubMed]
- Oliviero, C.; Pastell, M.; Heinonen, M.; Heikkonen, J.; Valros, A.; Ahokas, J.; Vainio, O.; Peltoniemi, O.A.T. Using movement sensors to detect the onset of farrowing. Biosyst. Eng. 2008, 100, 281–285. [Google Scholar] [CrossRef]
- Cornou, C.; Lundbye-Christensen, S.; Kristensen, A.R. Modelling and monitoring sows’ activity types in farrowing house using acceleration data. Comput. Electron. Agric. 2011, 76, 316–324. [Google Scholar] [CrossRef]
- Erez, B.; Hartsock, T.G. A microcomputer-photocell system to monitor periparturient activity of sows and transfer data to a remote location. J. Anim. Sci. 1990, 68, 88–94. [Google Scholar] [CrossRef] [PubMed]
- Pastell, M.; Hietaoja, J.; Tiusanen, J.; Yunm, J.; Valros, A. A model to detect farrowing based on sow activity. In Proceedings of the International Conference of Agricultural Engineering (AgEng 2014), Zurich, Switland, 6–10 July 2014. [Google Scholar] [CrossRef]
- Haskell, M.J.; Hutson, G.D. The pre-farrowing behaviour of sows with access to straw and space for locomotion. Appl. Anim. Behav. Sci. 1996, 49, 375–387. [Google Scholar] [CrossRef]
- Illmann, G.; Chaloupková, H.; Neuhauserová, K. Effect of pre- and post-partum sow activity on maternal behaviour and piglet weight gain 24 h after birth. Appl. Anim. Behav. Sci. 2015, 163, 80–88. [Google Scholar] [CrossRef]
- Mainau, E.; Dalmau, A.; Ruiz-de-la-Torre, J.L.; Manteca, X. Validation of an automatic system to detect position changes in puerperal sows. Appl. Anim. Behav. Sci. 2009, 121, 96–102. [Google Scholar] [CrossRef]
- Cornou, C.; Lundbye-Christensen, S. Modeling of sows diurnal activity pattern and detection of parturition using acceleration measurements. Comput. Electron. Agric. 2012, 80, 97–104. [Google Scholar] [CrossRef]
- Aparna, U.; Juul Pedersen, L.; Jørgensen, E. Hidden phase-type Markov model for the prediction of onset of farrowing for loose-housed sows. Comput. Electron. Agric. 2014, 108, 135–147. [Google Scholar] [CrossRef]
- Pastell, M.; Hietaoja, J.; Yun, J.; Tiusanen, J.; Valros, A. Predicting farrowing of sows housed in crates and pens using accelerometers and cusum charts. Comput. Electron. Agric. 2016, 127, 197–203. [Google Scholar] [CrossRef]
- Manteuffel, C.; Hartung, E.; Schmidt, M.; Hoffmann, G.; Schön, P.C. Towards qualitative and quantitative precidtion and detection of parturition onset in sows using light barriers. Comput. Electron. Agric. 2015, 116, 201–210. [Google Scholar] [CrossRef]
- Pichler, M.; Rudic, B.; Breitenberger, S.; Auer, W. Robust positioning of livestock in harsh agricultural environments. In Proceedings of the 14th Mechatronics Forum International Conference (Mechatronics 2014), Karlstad, Sweden, 16–18 June 2014; De Vin, L.J., Ed.; Curran: Red Hook, NY, USA, 2014; pp. 527–534. [Google Scholar]
- Montgomery, D.C. Statistical Process Control: A Modern Introduction; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Hartsock, T.G.; Barczewski, R.A. Prepartum behavior in swine: Effects of pen size. J. Anim. Sci. 1997, 75, 2899–2904. [Google Scholar] [CrossRef] [PubMed]
- Rushen, J.; Robert, S.; Farmer, C. Evidence of a limited role for prolactin in the preparturient activity of confined gilts. Appl. Anim. Behav. Sci. 2001, 72, 309–319. [Google Scholar] [CrossRef]
- Harris, M.J.; Gonyou, H.W. Increasing available space in a farrowing crate does not facilitate postural changes or maternal responses in gilts. Appl. Anim. Behav. Sci. 1998, 59, 285–296. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index Time Period | Orig | Diff | Quot | Over | CumDi | CumQ | CumAv | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N to find | 20 | 19 | 19 | 19 | 19 | 19 | 19 | ||||||||
| Time period | 12 h | 48 h | 12 h | 48 h | 12 h | 48 h | 12 h | 48 h | 12 h | 48 h | 12 h | 48 h | 12 h | 48 h | |
| Std | 60 | 70.0 | 90.0 | 78.9 | 94.7 | 63.2 | 89.5 | 63.2 | 89.5 | 78.9 | 100.0 | 68.4 | 94.7 | 73.7 | 94.7 |
| 30 | 65.0 | 85.0 | 73.7 | 89.5 | 57.9 | 84.2 | 57.9 | 84.2 | 73.7 | 100.0 | 63.2 | 89.5 | 73.7 | 94.7 | |
| 10 | 50.0 | 80.0 | 63.2 | 84.2 | 52.6 | 78.9 | 47.4 | 78.9 | 73.7 | 100.0 | 63.2 | 84.2 | 73.7 | 94.7 | |
| Var | 60 | 70.0 | 90.0 | 78.9 | 94.7 | 52.6 | 94.7 | 57.9 | 89.5 | 78.9 | 100.0 | 73.7 | 94.7 | 78.9 | 100.0 |
| 30 | 60.0 | 85.0 | 73.7 | 89.5 | 42.1 | 78.9 | 52.6 | 78.9 | 78.9 | 100.0 | 63.2 | 89.5 | 78.9 | 94.7 | |
| 10 | 50.0 | 80.0 | 57.9 | 84.2 | 42.1 | 78.9 | 42.1 | 73.7 | 78.9 | 100.0 | 52.6 | 78.9 | 78.9 | 94.7 | |
| 1st-var | 60 | 60.0 | 90.0 | 78.9 | 94.7 | 73.7 | 94.7 | 73.7 | 94.7 | 84.2 | 100.0 | 73.7 | 94.7 | 73.7 | 94.7 |
| 30 | 50.0 | 85.0 | 73.7 | 89.5 | 68.4 | 89.5 | 68.4 | 89.5 | 78.9 | 100.0 | 68.4 | 89.5 | 73.7 | 94.7 | |
| 10 | 45.0 | 75.0 | 57.9 | 84.2 | 57.9 | 89.5 | 57.9 | 94.7 | 78.9 | 100.0 | 63.2 | 89.5 | 73.7 | 94.7 | |
| 2nd-var | 60 | 65.0 | 90.0 | 78.9 | 94.7 | 57.9 | 94.7 | 63.2 | 94.7 | 78.9 | 100.0 | 68.4 | 94.7 | 73.7 | 94.7 |
| 30 | 55.0 | 85.0 | 68.4 | 89.5 | 47.4 | 84.2 | 47.4 | 84.2 | 78.9 | 100.0 | 52.6 | 89.5 | 73.7 | 94.7 | |
| 10 | 50.0 | 80.0 | 57.9 | 84.2 | 36.8 | 78.9 | 42.1 | 78.9 | 78.9 | 100.0 | 52.6 | 78.9 | 73.7 | 94.7 | |
| 3rd-var | 60 | 60.0 | 90.0 | 68.4 | 94.7 | 41.1 | 84.2 | 36.8 | 73.7 | 78.9 | 94.7 | 52.6 | 89.5 | 78.9 | 94.7 |
| 30 | 55.0 | 85.0 | 63.2 | 89.5 | 26.3 | 68.4 | 31.6 | 78.9 | 73.7 | 94.7 | 47.4 | 78.9 | 73.7 | 94.7 | |
| 10 | 45.0 | 85.0 | 57.9 | 84.2 | 31.6 | 68.4 | 26.3 | 68.4 | 73.7 | 94.7 | 42.1 | 73.7 | 73.7 | 94.7 | |
| Int1 | Int5 | Int9 | Int13 | Int19 | Int25 | ||
|---|---|---|---|---|---|---|---|
| Diff | m4 | 42.1 | 47.4 | 52.6 | 57.9 | 57.9 | 57.9 |
| m5 | 44.4 | 44.4 | 55.6 | 55.6 | 55.6 | 55.6 | |
| m45 | 44.4 | 44.4 | 55.6 | 55.6 | 55.6 | 55.6 | |
| Quot | m4 | 36.8 | 36.8 | 47.4 | 57.9 | 52.6 | 57.9 |
| m5 | 38.9 | 44.4 | 38.9 | 44.4 | 50.0 | 50.0 | |
| m45 | 44.4 | 44.4 | 44.4 | 50.0 | 50.0 | 50.0 | |
| Over | m4 | 31.6 | 36.8 | 52.6 | 52.6 | 52.6 | 57.9 |
| m5 | 44.4 | 44.4 | 44.4 | 44.4 | 44.4 | 50.0 | |
| m45 | 38.9 | 44.4 | 38.9 | 50.0 | 50.0 | 50.0 | |
| CumDi | m4 | 78.9 | 78.9 | 78.9 | 78.9 | 78.9 | 78.9 |
| m5 | 55.6 | 55.6 | 55.6 | 55.6 | 61.1 | 61.1 | |
| m45 | 72.2 | 72.2 | 72.2 | 66.6 | 66.6 | 66.6 | |
| CumQ | m4 | 36.8 | 36.8 | 42.1 | 52.6 | 63.2 | 63.2 |
| m5 | 44.4 | 38.9 | 44.4 | 55.6 | 50.0 | 55.6 | |
| m45 | 38.9 | 38.9 | 44.4 | 50.0 | 50.0 | 55.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Traulsen, I.; Scheel, C.; Auer, W.; Burfeind, O.; Krieter, J. Using Acceleration Data to Automatically Detect the Onset of Farrowing in Sows. Sensors 2018, 18, 170. https://doi.org/10.3390/s18010170
Traulsen I, Scheel C, Auer W, Burfeind O, Krieter J. Using Acceleration Data to Automatically Detect the Onset of Farrowing in Sows. Sensors. 2018; 18(1):170. https://doi.org/10.3390/s18010170
Chicago/Turabian StyleTraulsen, Imke, Christoph Scheel, Wolfgang Auer, Onno Burfeind, and Joachim Krieter. 2018. "Using Acceleration Data to Automatically Detect the Onset of Farrowing in Sows" Sensors 18, no. 1: 170. https://doi.org/10.3390/s18010170
APA StyleTraulsen, I., Scheel, C., Auer, W., Burfeind, O., & Krieter, J. (2018). Using Acceleration Data to Automatically Detect the Onset of Farrowing in Sows. Sensors, 18(1), 170. https://doi.org/10.3390/s18010170