3Cat-3/MOTS Nanosatellite Mission for Optical Multispectral and GNSS-R Earth Observation: Concept and Analysis


Abstract
:1. Introduction
- To identify the limit of current CubeSat technology in terms of spatial resolution and required power to accomplish a multispectral optical and GNSS-R space mission.
- To evaluate the feasibility of using Commercial off the Shelf (COTS) optical equipment in space to achieve 3Cat-3/MOTS’s mission requirements.
- To acquire multispectral images from the visible to the near infrared (400 nm to 870 nm) with a spatial resolution better than 30 m and swath wider than 30 km with a signal-to-noise ratio (SNR) better than 30 dB in each band.
- To achieve a revisit time of less than 10 days over the Catalan territory to properly respond to territorial changes.
- To perform data fusion of the observables acquired by both payloads: multispectral imagery from the optical sensor and L-band reflectometry data from the GNSS-R soil moisture mapping at 30 m resolution.
2. Materials and Methods
2.1. Orbit Selection
2.2. Platform Selection
- High spatial resolution is achieved by using sensors with a small detector size and long focal lengths. This discards 1U and 2U CubeSats in favor of 3U and 6U ones. In a 3U, most of the inner space would be used for the optical sensor and the optical train, leaving little space for the GNSS-R payload (antenna and microwave receiver) and all other satellite subsystems.
- The electrical power to be supplied to the subsystems and payload of the 3Cat-3/MOTS cannot be supplied by a 3U CubeSat.
2.3. Preliminary Concepts and Simulation Configuration
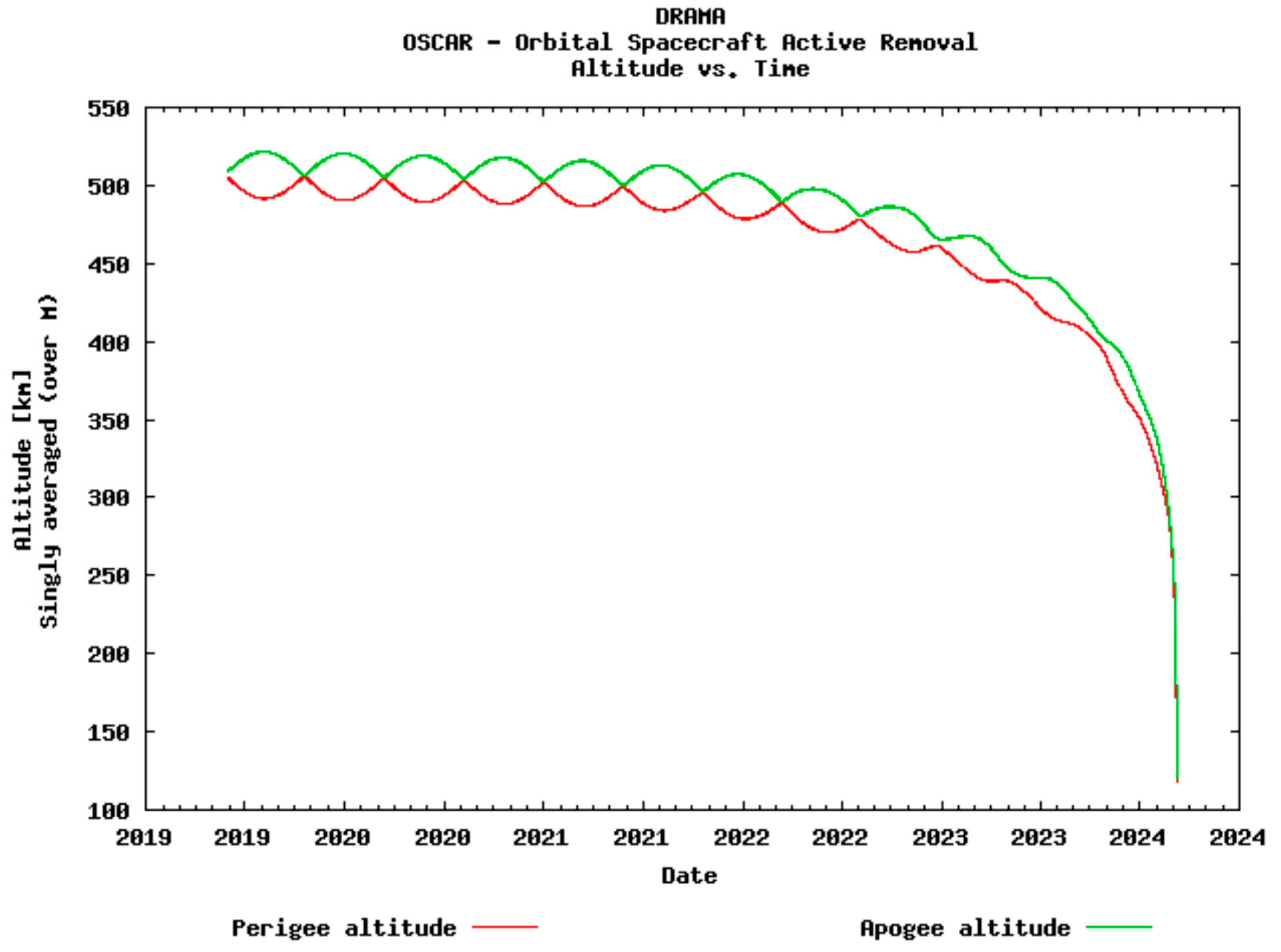
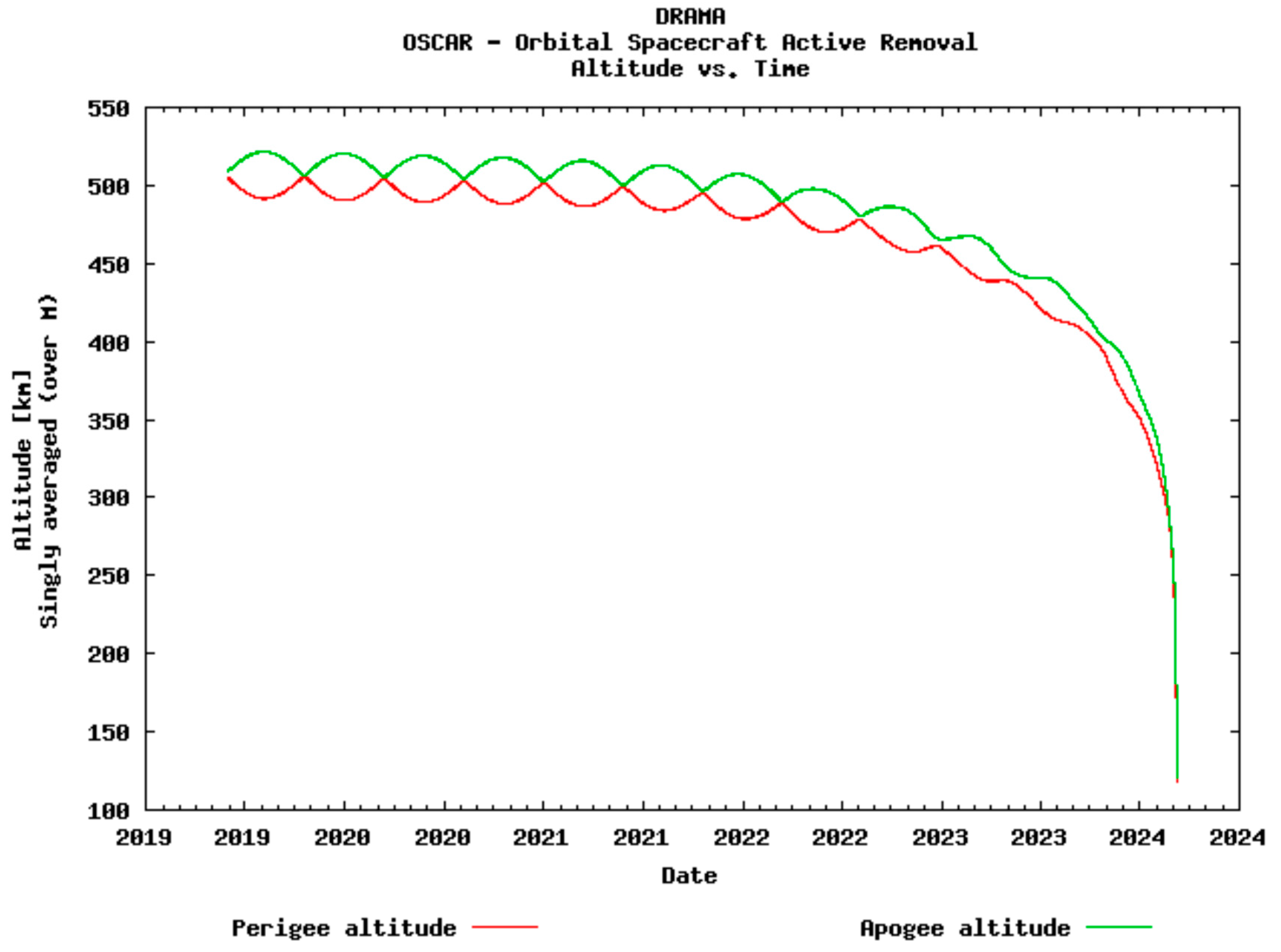
2.3.1. Orbital Lifetime
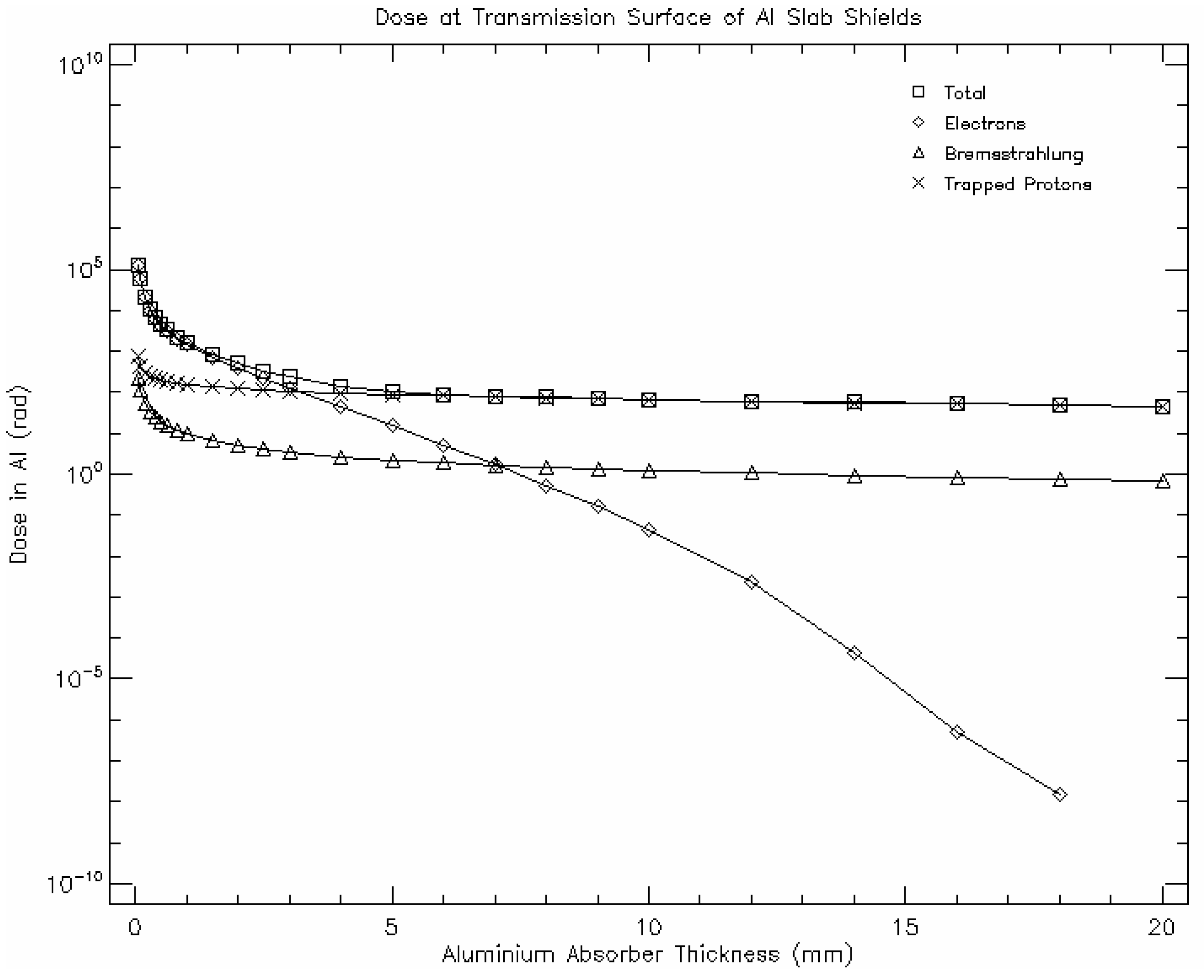
2.3.2. Shielding
- Galactic Cosmic Rays (GCR) are high-energy charged particles that have originated outside our Solar system. Shielding is not effective to protect the platform against GCR.
- Solar Energetic Particles (SEP) are electrons, protons, and heavy ions that have originated in the Sun. Also, gradual events accelerated by Coronal Mass Ejections (CME) and impulsive events from Solar flares present a risk to the satellite’s electronics.
- Solar wind: Plasma of charged particles causing disturbances in the magnetosphere.
- Radiation belts: Charged particles (protons and electrons) trapped by the Earth’s magnetic field.
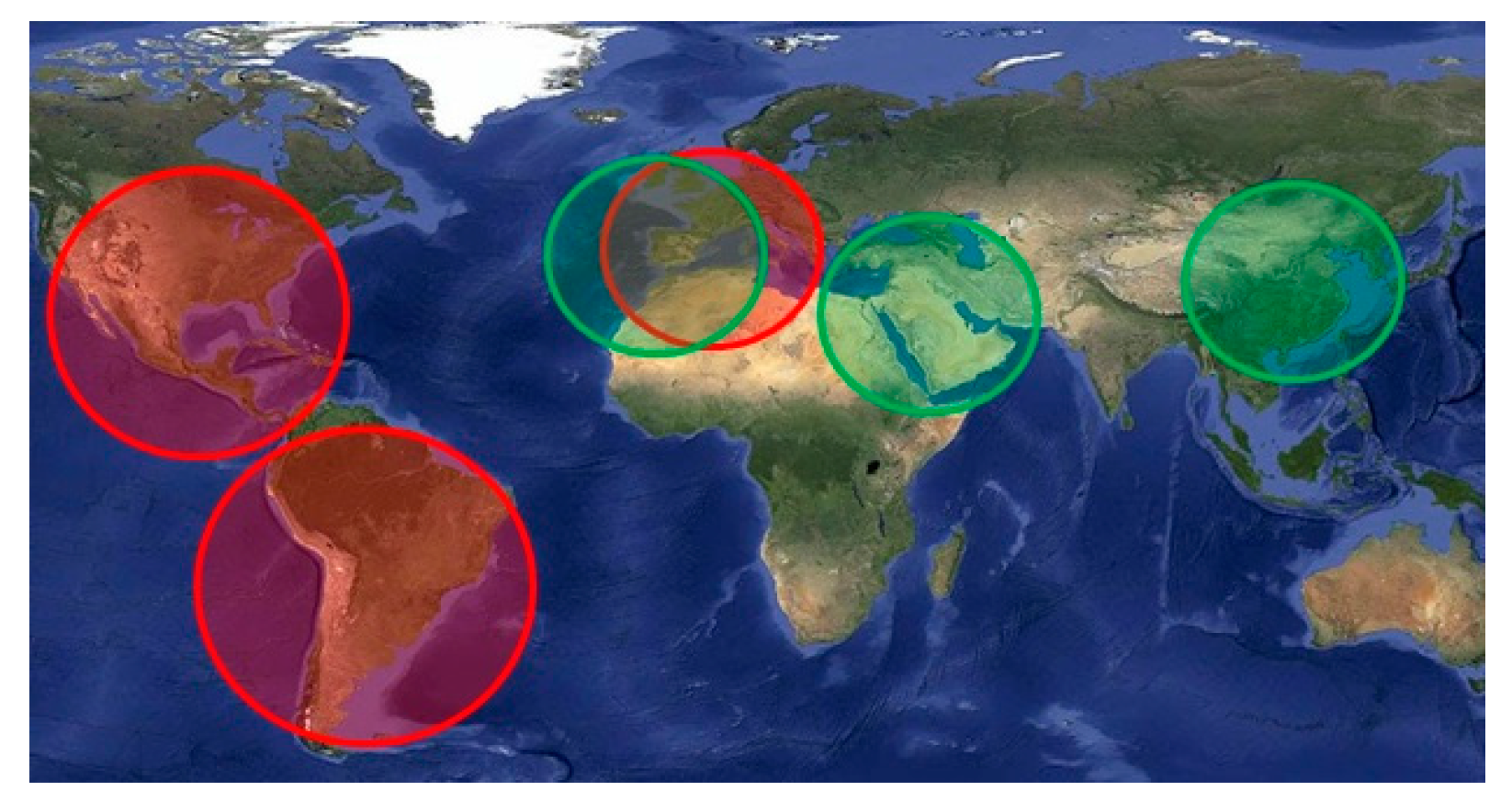
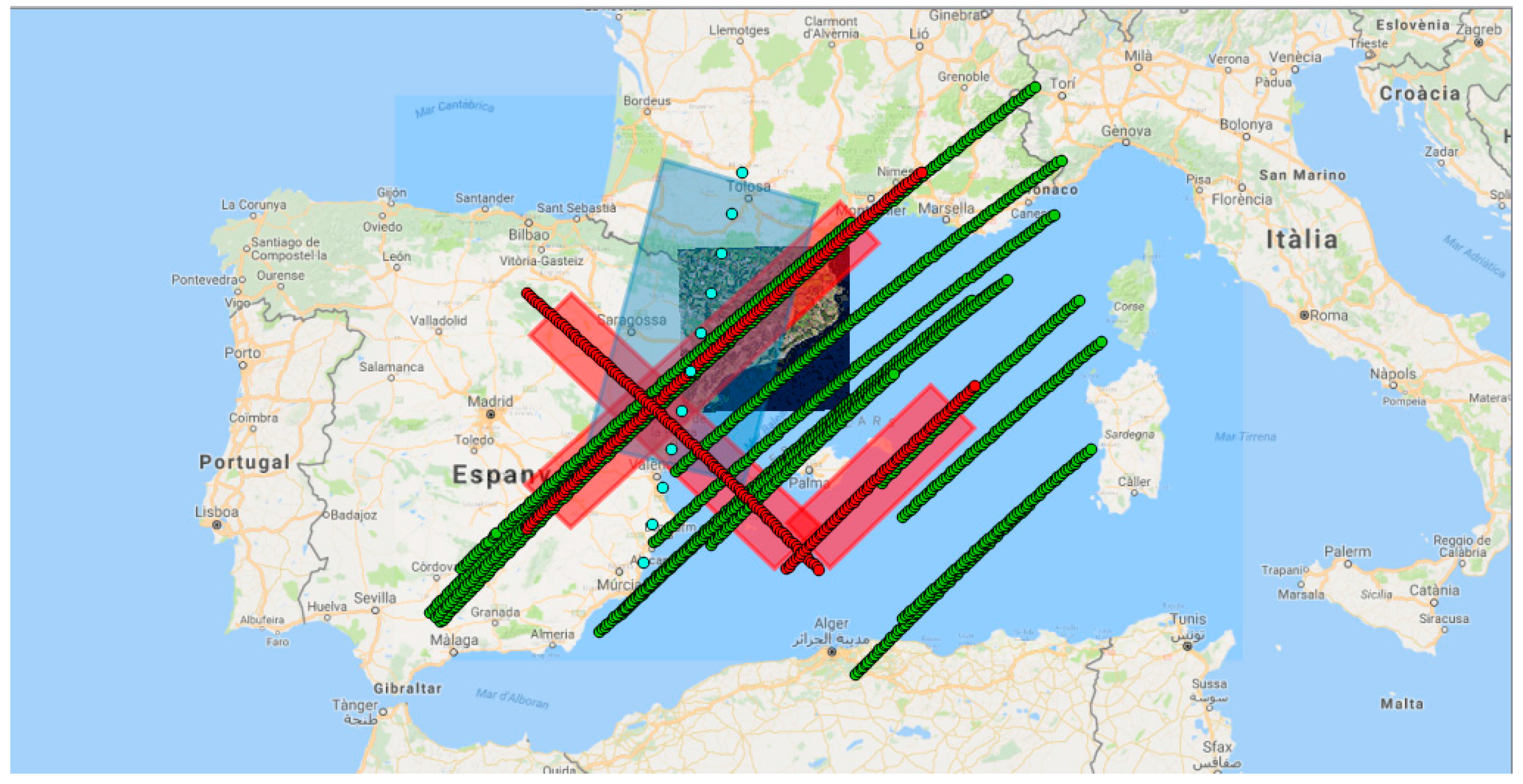
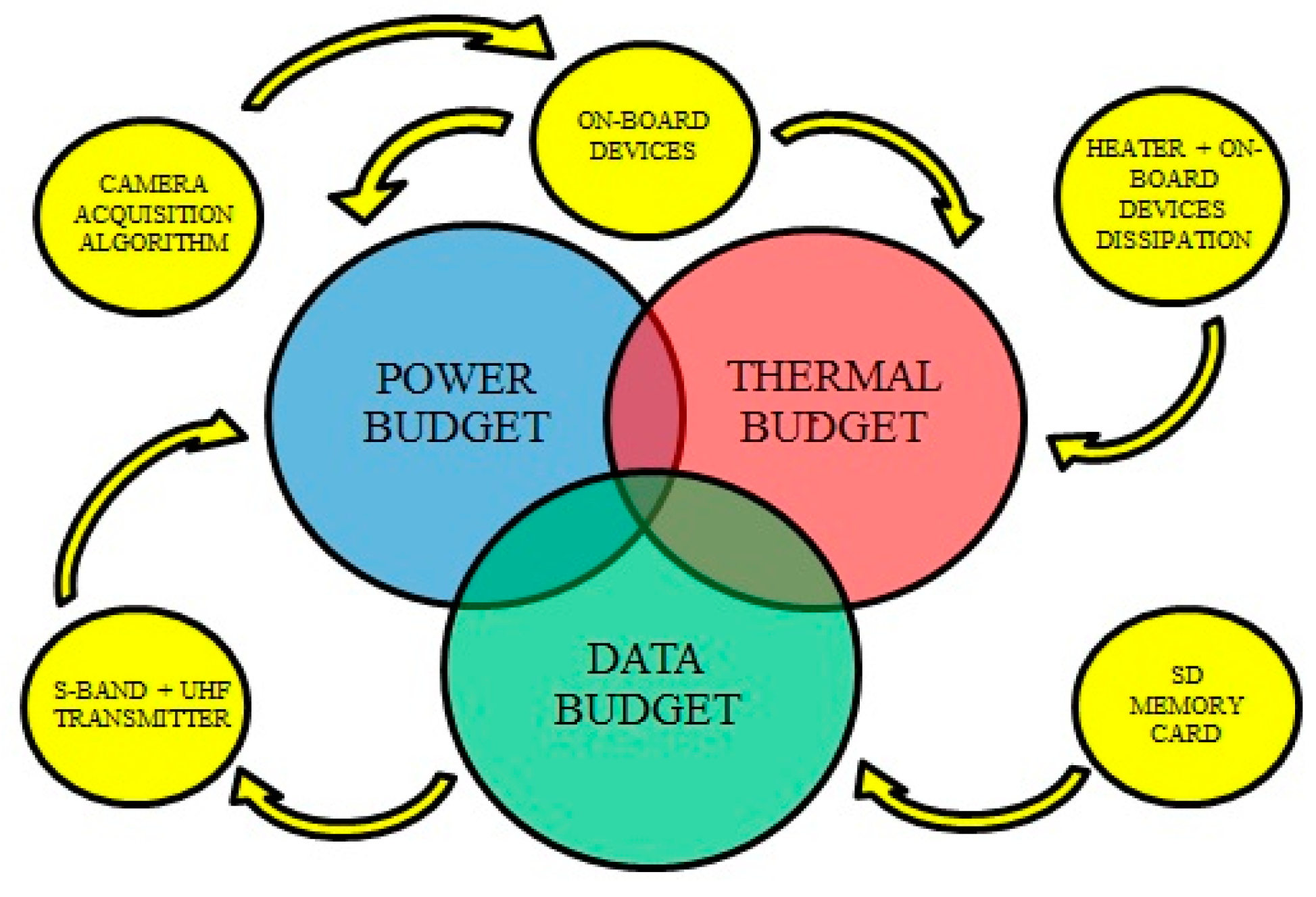
2.3.3. Scheduler
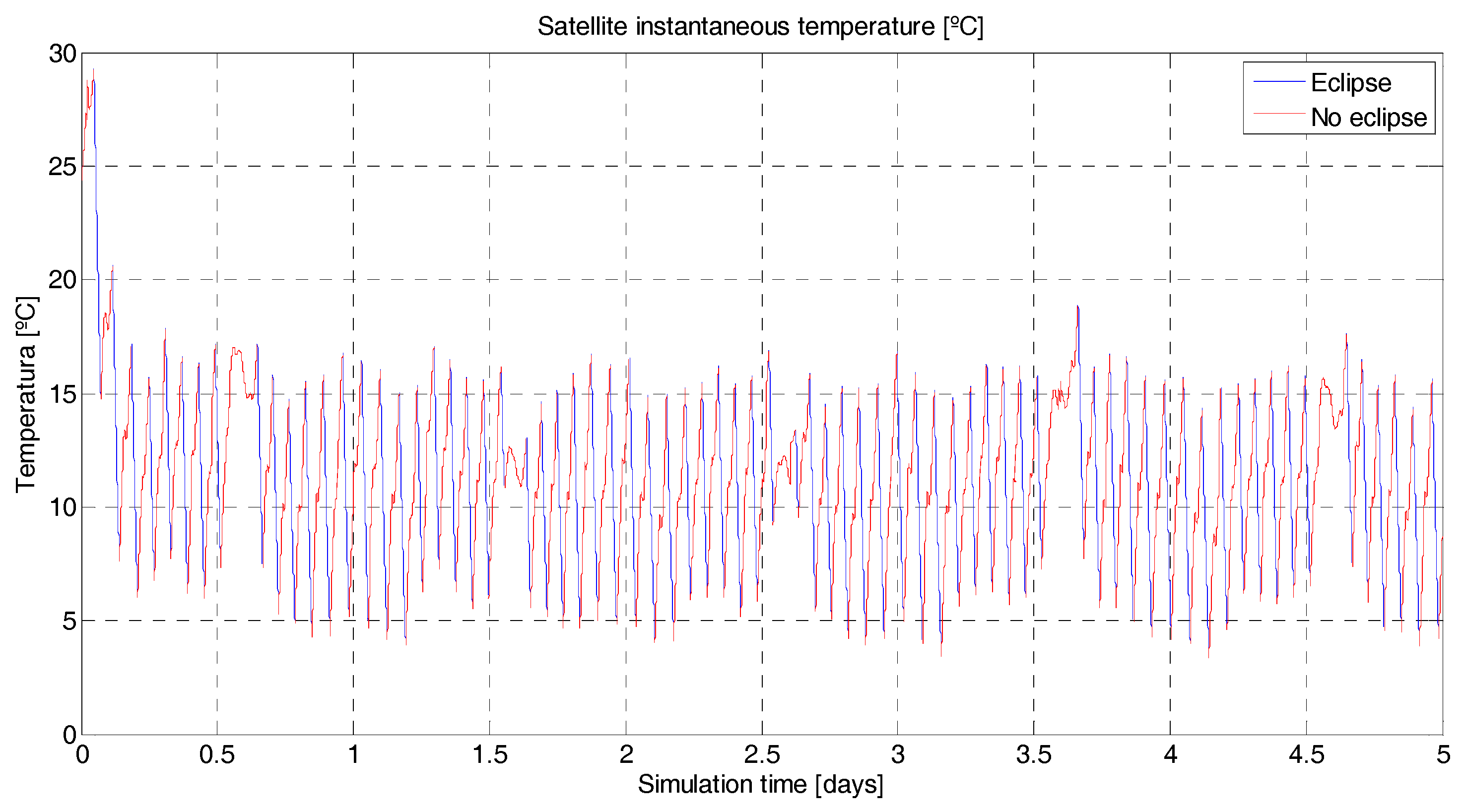
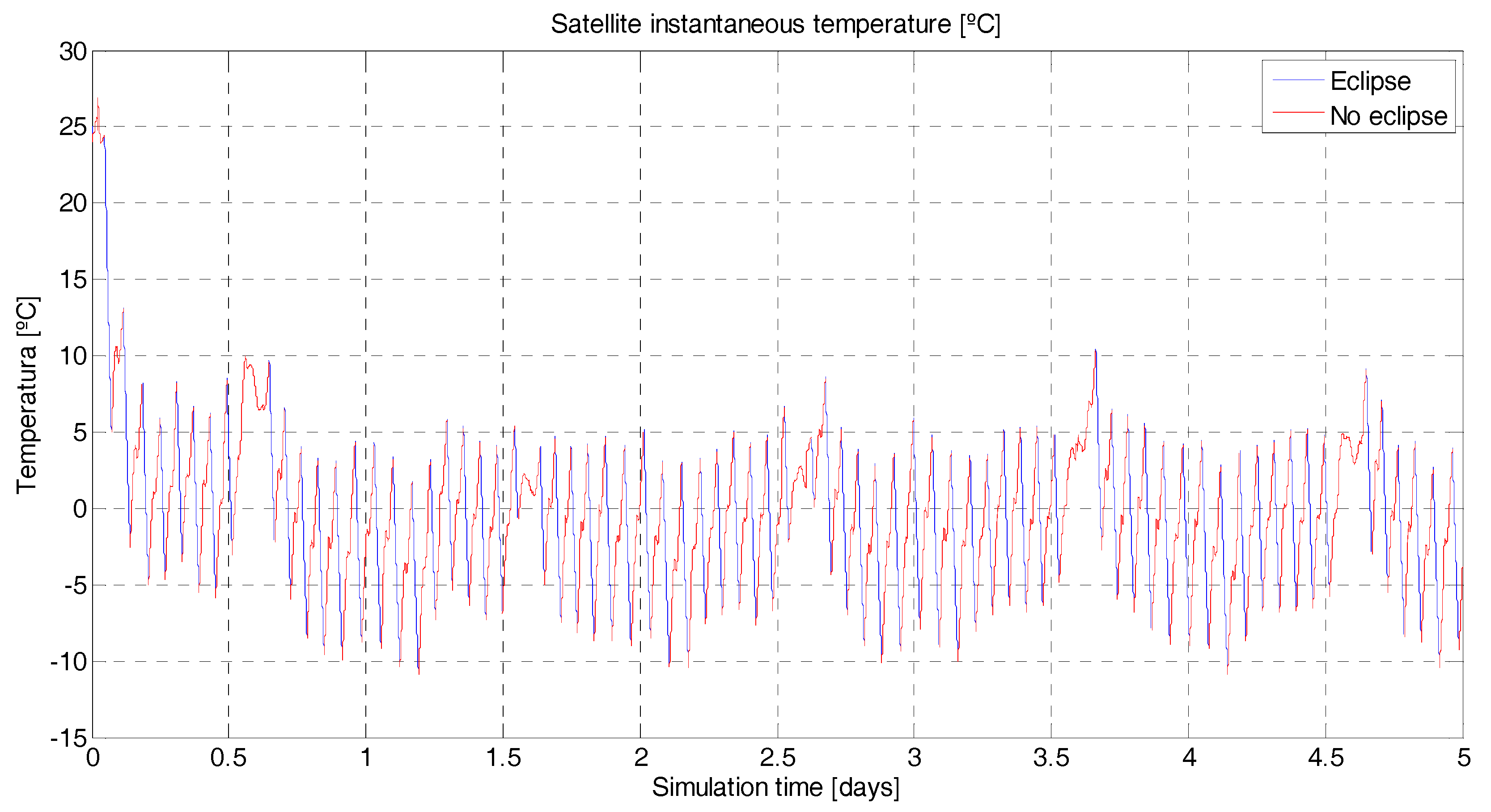
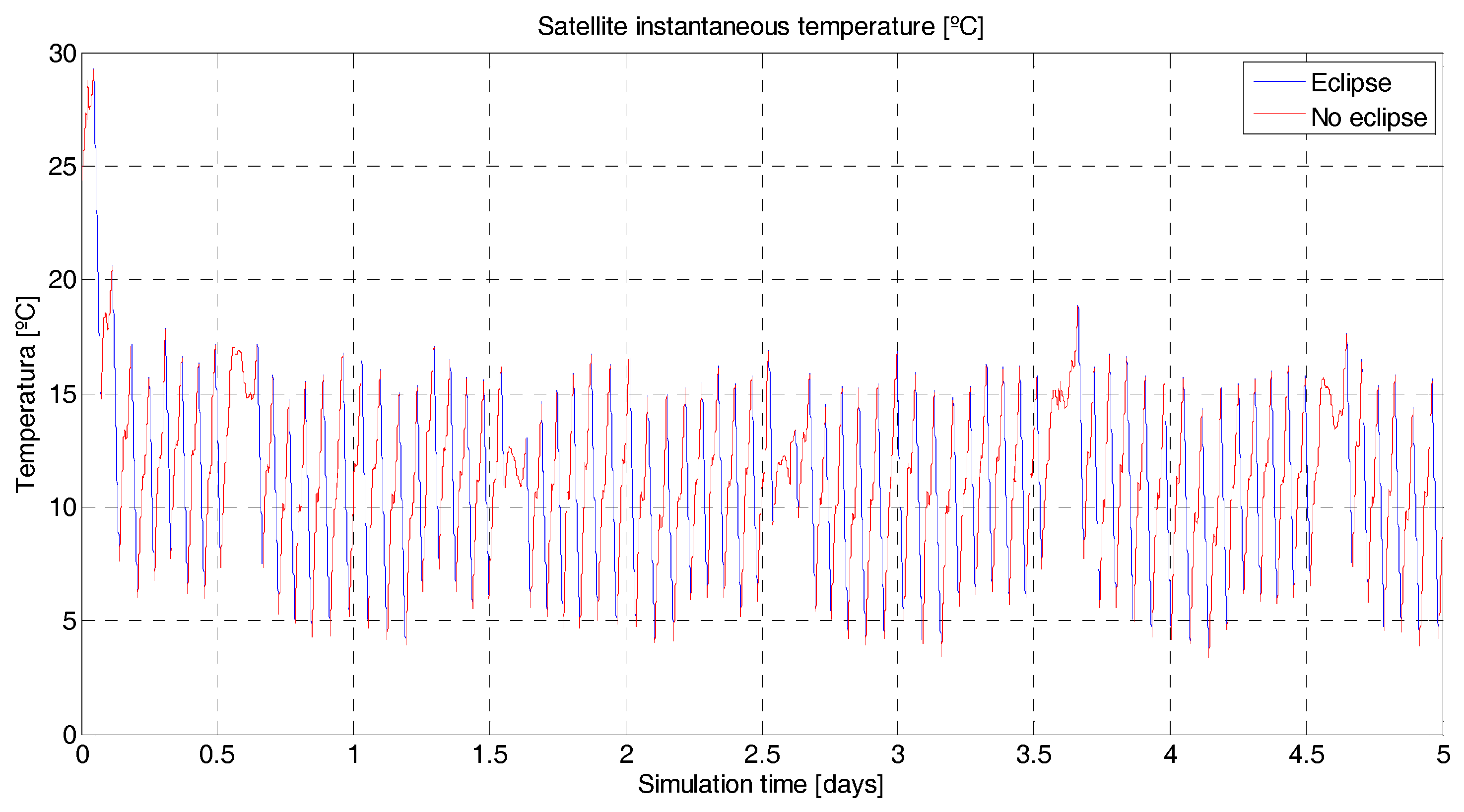
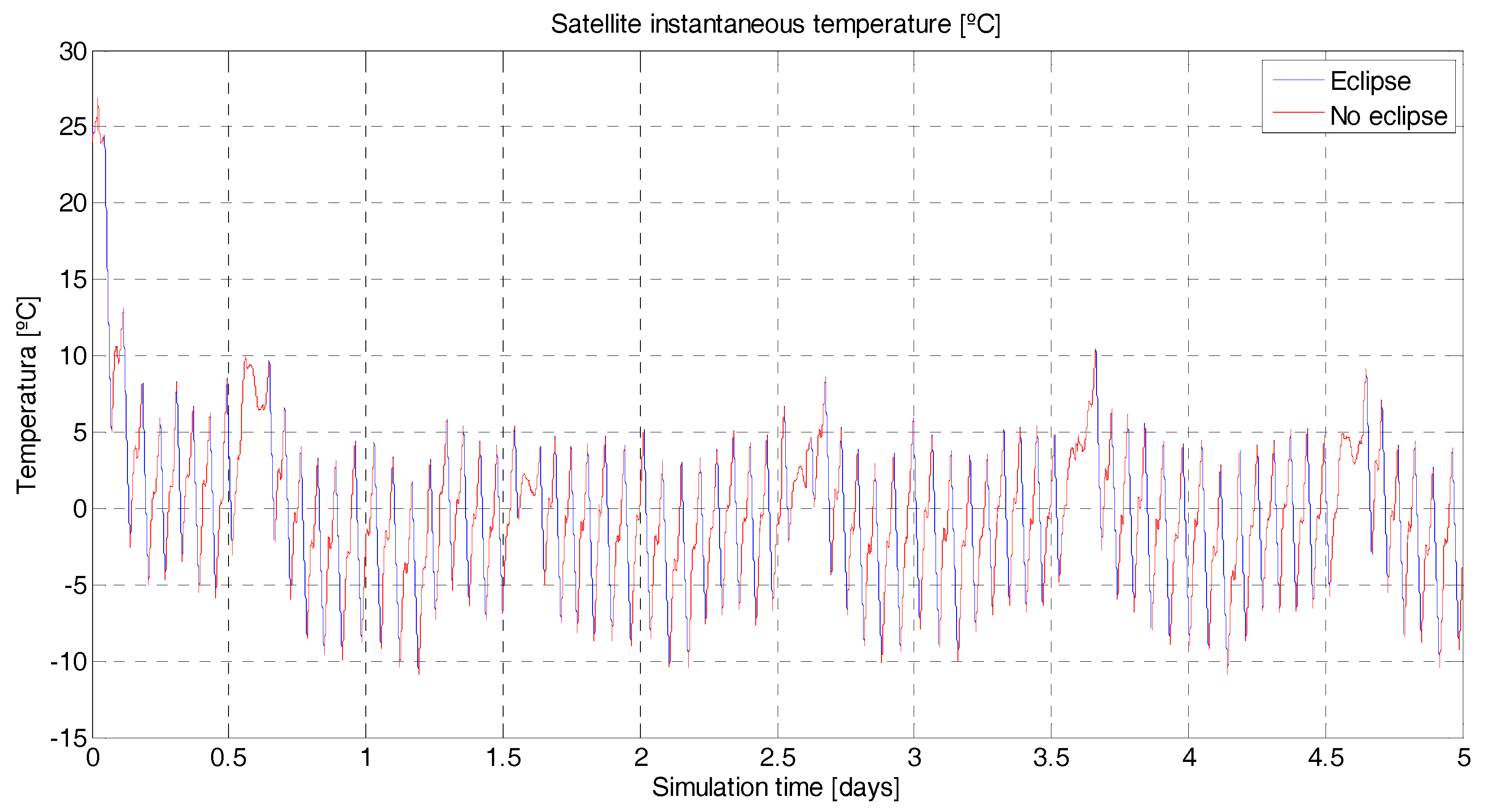
- The thermal tolerance of all devices and materials on-board the satellite. The scheduler takes into consideration the energy dissipated in the form of heat by all devices on-board, as well as the Sun-eclipse periods experienced by the satellite. The heater will turn on if the temperature drops under a threshold and will not power off until the temperature reaches a certain level (5 °C and 8 °C, respectively). The batteries have the most restrictive temperature working range (between 0 °C and 45 °C); therefore, the hysteresis cycle that controls the heater prevents it from turning on/off constantly.
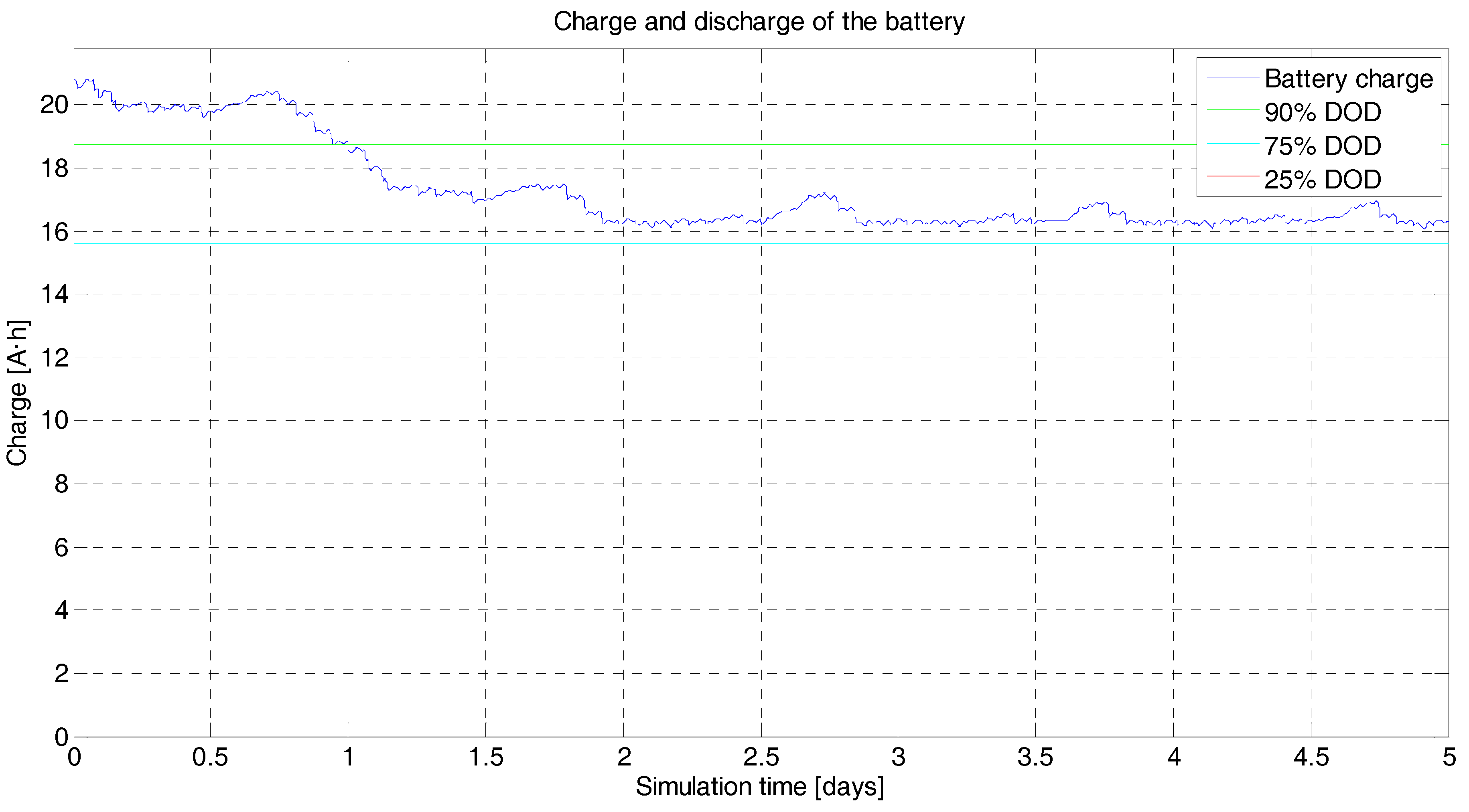
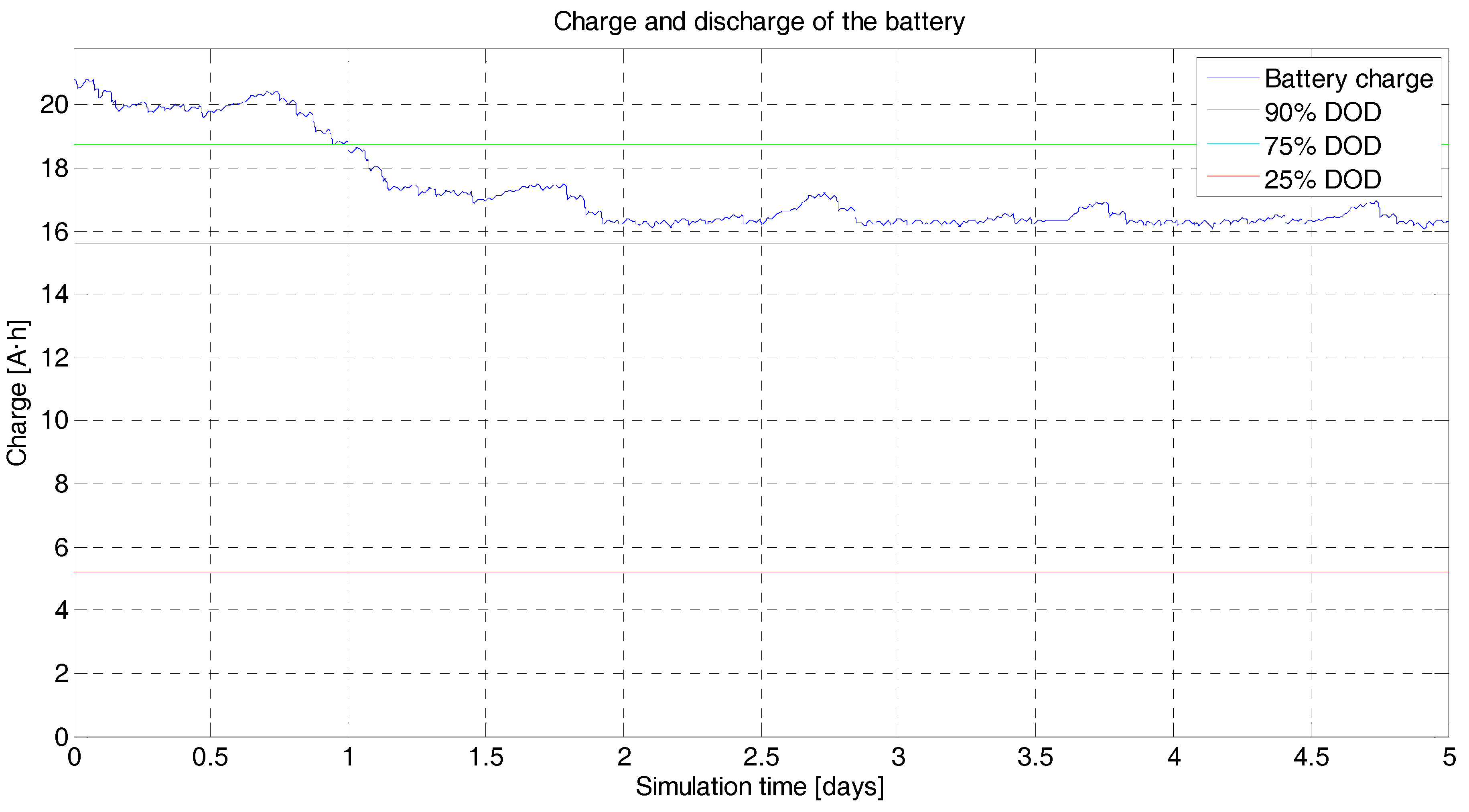
- The impossibility to recharge the batteries in case of a total discharge as well as the maximum number of cycles of charge and discharge under different Depth of Discharge (DoD) levels as specified by the manufacturer (e.g., [25]).
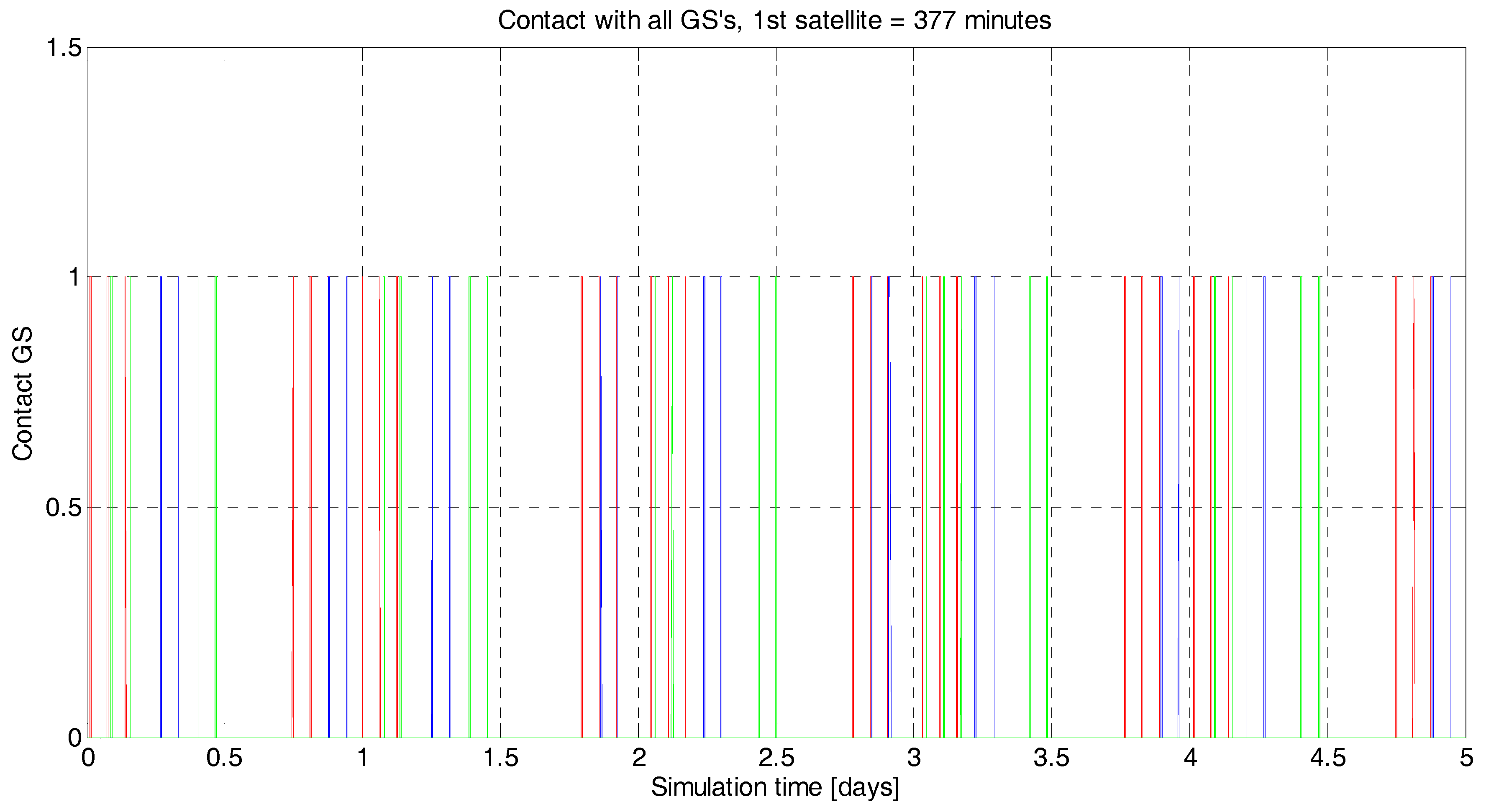
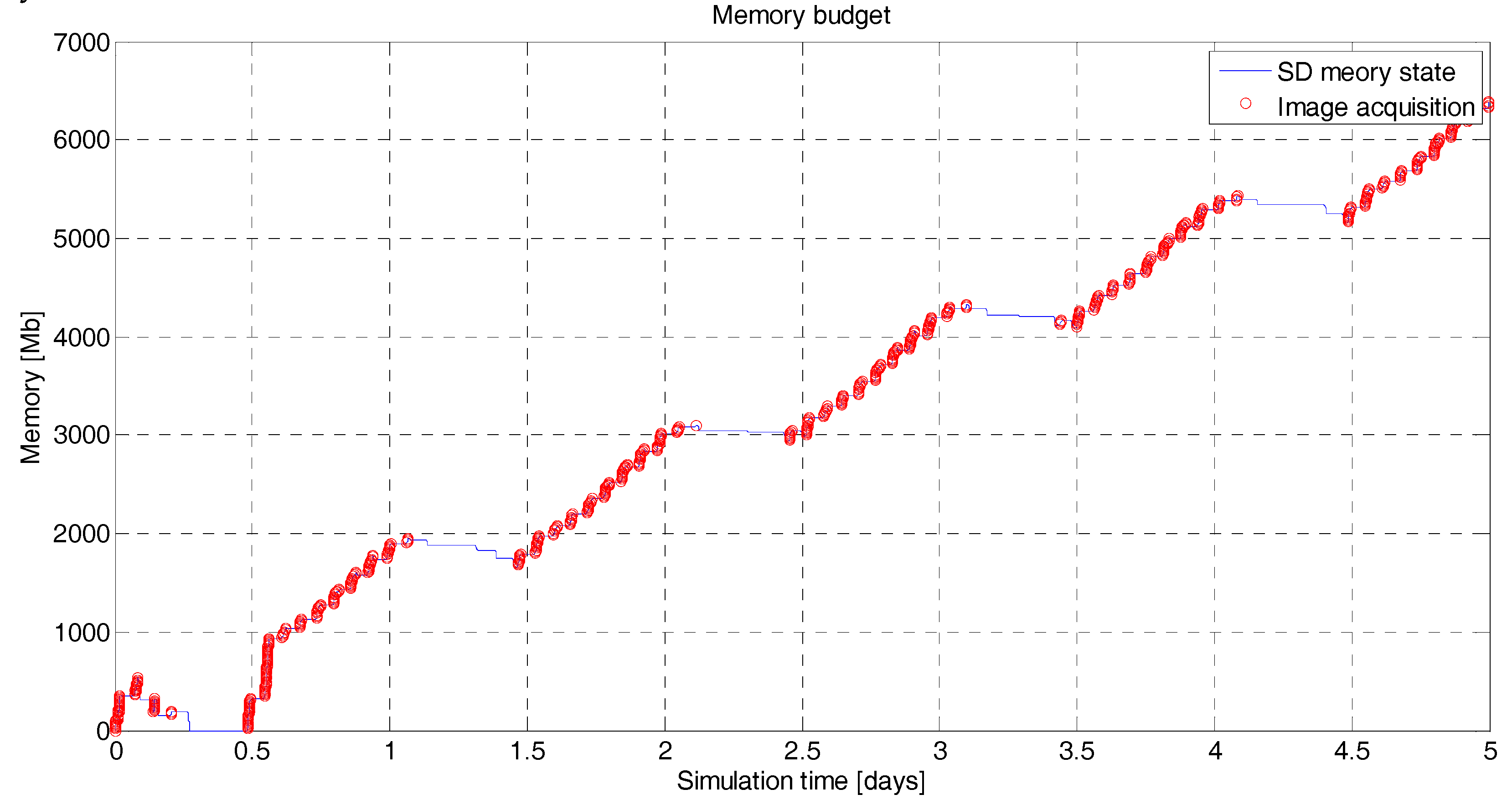
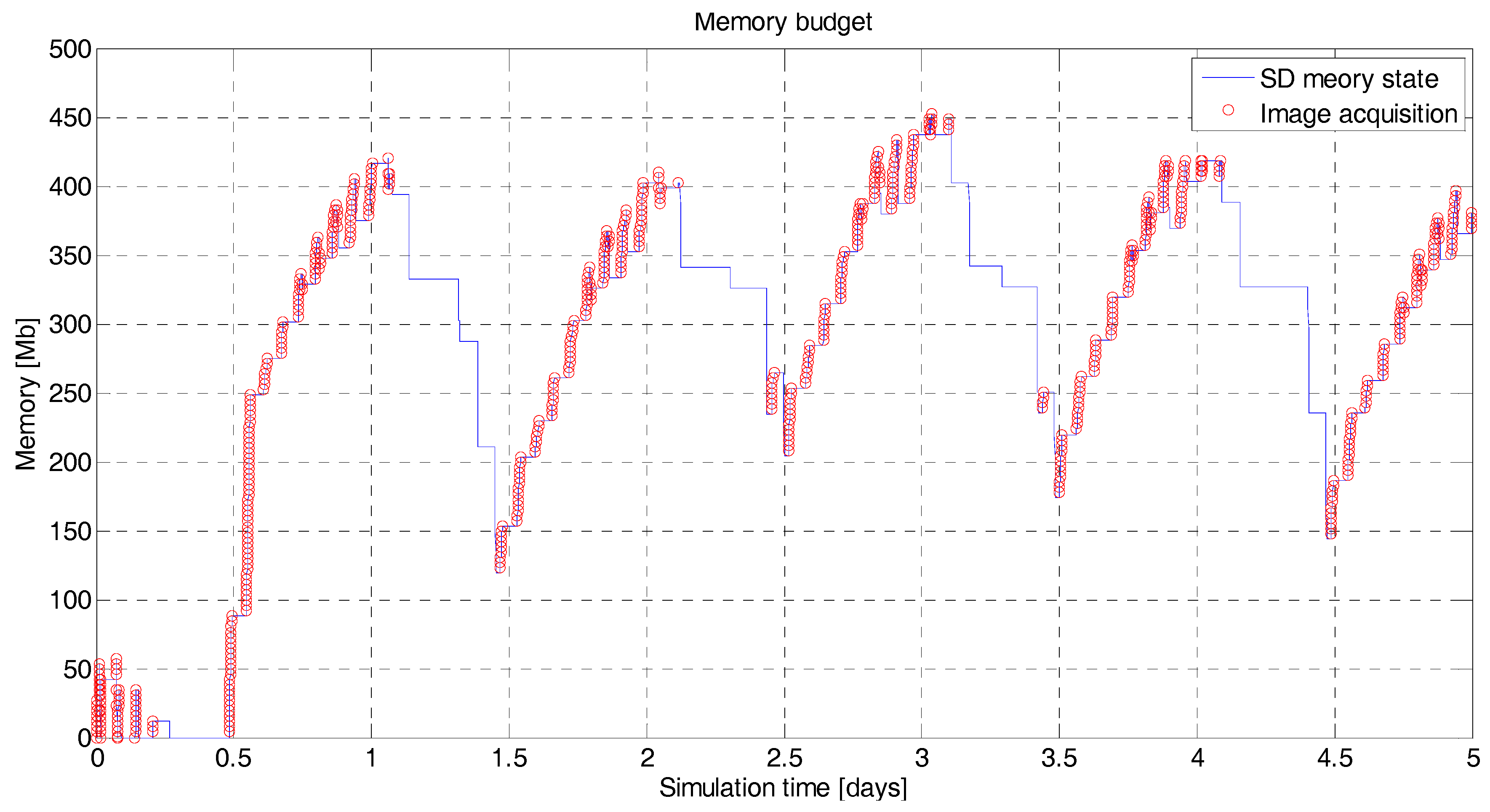
- The amount of data stored in the on-board memory. The scheduler is programed to give priority to the discharge of the data over the acquisition of new data when the amount of data stored on-board exceeds a certain limit. On the other hand, when the memory is below certain level (20% of the total storage maximum capacity) data acquisition has priority over the download of data.
3. Results
3.1. Mission Analysis
3.1.1. Payload Analysis
3.1.2. Power Subsystem and Budget
3.1.3. Thermal Budget
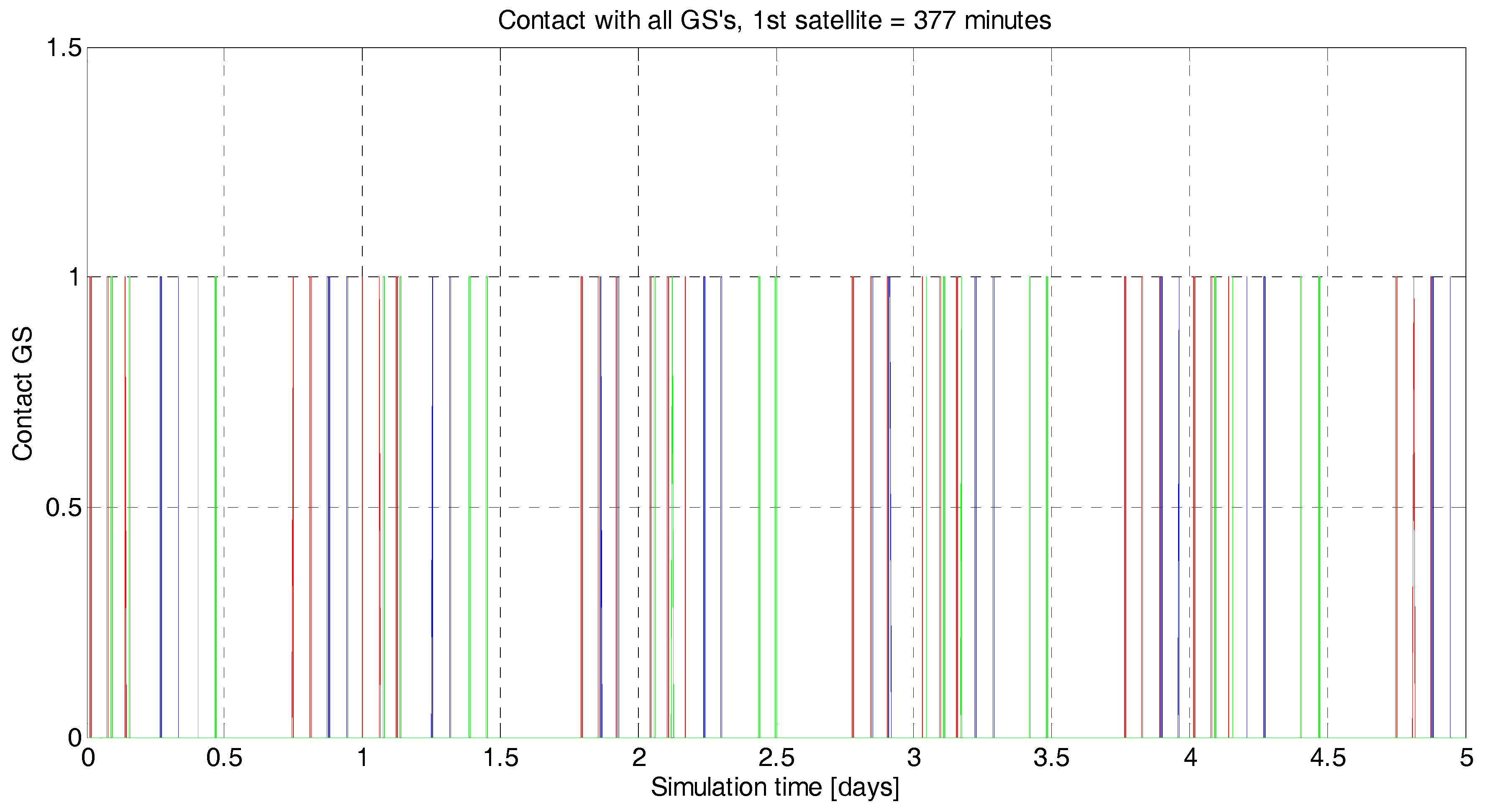
3.1.4. Data Handling and Budget
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lee, S.; Hutputasin, A.; Toorian, A.; Lan, W.; Munakata, R. Cubesat Design Specification; California Polytechnic State University: San Luis Obispo, CA, USA, 2009. [Google Scholar]
- The Tauri Group. State of the Satellite Industry Report 2017; Satellite Industry Association SIA: Washington, DC, USA, 2015. [Google Scholar]
- SpaceWorks Enterprises, Inc. Nano/Microsatellite Market Forecast; SpaceWorks Enterprises, Inc.: Washington, DC, USA, 2017; Available online: http://spaceworksforecast.com/ (accessed on 5 December 2017).
- Golkar, A.; Lluch, I. The Federated Satellite System paradigm: Concept and business case evaluation. Acta Astronaut. 2015, 111, 230–248. [Google Scholar] [CrossRef]
- Larson, W.J.; Wertz, J.R. Space mission analysis and design. In Space Technology Library; Springer: Berlin, Germany, 2006; pp. 132–141. ISBN 0-7923-5901-1. [Google Scholar]
- Olivé, R.; Amézaga, A.; Carreno-Luengo, H.; Park, H.; Camps, A. Implementation of a GNSS-R Payload Based on Software-Defined Radio for the 3Cat-2 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4824–4833. [Google Scholar] [CrossRef]
- Zavorotny, V.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote ensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Jove, R.; Araguz, C.; Via, P.; Solanellas, A.; Amézaga, A.; Vidal, D.; Muñoz, J.F.; Marí, M.; Olivé, R.; Saez, A.; et al. 3Cat-1: A multi-payload Cubesat-based scientific and technology demonstrator. Eur. J. Remote Sens. 2017, 50, 125–136. [Google Scholar] [CrossRef]
- Carreño-Luengo, H.; Camps, A.; Jove-Casurellas, R.; Alonso-Arroyo, A.; Olivé, R.; Amézaga, A.; Vidal, D.; Muñoz, J.F. 3Cat-2—An experimental nanosatellite for GNSS-R Earth observation: Mission concept and analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4540–4551. [Google Scholar] [CrossRef]
- Fly Your Satellite ESA Program. Available online: http://www.esa.int/Education/CubeSats_-_Fly_Your_Satellite/Fly_Your_Satellite!_programme (accessed on 5 December 2017).
- Copernicus Masters Award Winne. Available online: http://www.copernicus-masters.com/winner/ffscat-towards-federated-eo-systems/ (accessed on 5 December 2017).
- NanoSat Lab Facilities at UPC Barcelona Tech. Available online: https://nanosatlab.upc.edu/en/facilities (accessed on 5 December 2017).
- Rawashdeh, S.A.; Lumpp, J.E. Aerodynamic Stability for CubeSats at ISS Orbit; JoSS: Hampton, VA, USA, 2013; Volume 2, pp. 85–104. [Google Scholar]
- DRAMA-OSCAR Graphical User Inferface Version 2.1.0. Available online: https://sdup.esoc.esa.int/web/csdtf/home (accessed on 5 December 2017).
- ESA Space Debris Mitigation Compliance Verification Guidelines. Available online: http://www.copernicus-masters.com/wp-content/uploads/2017/03/ESSB-HB-U-002-Issue119February20151.pdf (accessed on 5 December 2017).
- Wertz, J.M.; Sarzi-Amade, N.; Shao, A.; Taylor, C.; van Allen, R.E. Moderately Elliptical Very Low Orbits (MEVLOs) as a Long-Term Solution to Orbit Debris. In Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, SSC12-IV-6, Logan, UT, USA, 13–16 August 2012. [Google Scholar]
- Qiao, L.; Rizos, C.; Dempster, A.G. Analysis and Comparison of CubeSat Lifetime. In Proceedings of the 12th Australian Space Development Conference, Adelaide, Australia, 8–10 July 2013. [Google Scholar]
- NASA Debris Assesment Software 2.0.2. Available online: https://www.orbitaldebris.jsc.nasa.gov/mitigation/das.html (accessed on 5 December 2017).
- Hashemi, P.; Hook, T.B. 2017 Symposium on VLSI technology short course technology enablers for 5nm and next wave of integration. In Proceedings of the 2017 Symposium on VLSI Technology, Kyoto, Japan, 5–8 June 2017. [Google Scholar]
- Thomsen, D.L.; Kim, W.; Culter, J.W. Shields-1, A SmallSat Radiation Shielding Technology Demonstration; NASA Langley Research Center: Hampton, VA, USA, August 2015. Available online: https://ntrs.nasa.gov/search.jsp?R=20160006374 (accessed on 5 December 2017).
- Atwell, W.; Rojde, K.; Aghara, S.; Sriprisan, S. Mitigating the Effects of the Space Radiation Environment: A Novel Approach of Using Graded-Z Materials. In Proceedings of the AIAA Space 2013 Conference, San Diego, CA, USA, 10–12 September 2013. [Google Scholar]
- SPENVIS. Space Environment Information System. Available online: https://www.spenvis.oma.be/ (accessed on 5 December 2017).
- Fortescue, P.; Stark, J.; Swinerd, G. Spacecraft Systems Engineering; Wiley: Hoboken, NJ, USA, 2003; ISBN 0-470-85102-3. [Google Scholar]
- Observatori del Montsec. Available online: http://www.parcastronomic.cat/ (accessed on 5 December 2017).
- Crompton, T.R. Battery Reference Book; Newnes: Woburn, MA, USA, 2000; p. 117. ISBN 9780080499956. [Google Scholar]
- Castellví, J. Feasibility Study of a Multispectral Remote Sensing Mission Based on a 6U CubeSat Standard. Master's Thesis, ETSETB, UPC and ICGC, 2014. Available online: http://upcommons.upc.edu/handle/2099.1/23600 (accessed on 5 December 2017).
- Illunis. Available online: http://www.illunis.com/area-scan-cameras/71-mp-cmos/ (accessed on 5 December 2017).
- Tetracam. Available online: http://www.tetracam.com/Products-RGB+3.htm (accessed on 5 December 2017).
- Jai. Available online: http://www.jai.com/en/products/multi-imager/multi-spectralimaging (accessed on 5 December 2017).
- Miguélez, N. Flexible Microwave Satellite Payload Using a Software Defined Radio. Bachelor's Thesis, Universitat Politécnica de Catalunya, Barcelona, Spain, January 2017. [Google Scholar]
- Gomspace. Available online: https://gomspace.com/home.aspx (accessed on 5 December 2017).
- ISIS (Innovative Solutions In Space) Communication Systems. Available online: https://www.isispace.nl/product/isis-txs-s-band-transmitter/ (accessed on 5 December 2017).
- Villafranca, A.G.; Corbera, J.; Martín, F.; Marchán, J.F. Limitations of Hyperspectral Earth Observation on Small Satellites; JoSS: Hampton, VA, USA, 2012; Volume 1, pp. 19–29. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attitude Requirements | ||
| Pointing knowledge at nadir | 120 | arcsec |
| Pointing stability | 20 | arcsec/s |
| Main Exploitation Requirements | ||
| Digitalization | 12 | bits |
| Data storage on board | >1 | Gb |
| GSD at nadir pointing | <30 | m |
| Swath at nadir pointing | >30 | km |
| Main Radiometric Budget | SNR (dB) | MTF (lp/mm) |
| Blue band (440–510 nm) | 35 | 25 |
| Green band (520–590 nm) | 35 | 25 |
| Red band (620–680 nm) | 35 | 25 |
| Red edge band (690–730 nm) | 35 | 20 |
| NIR band (850–890 nm) | 30 | 20 |
| Extra band (if available) | 30 | 20 |
| Object Name | Sub Component Object | DemiseAltitude (km) |
|---|---|---|
| 3Cat-3/MOTS | Chasis | 73.7 |
| Solar panels | 77.5 | |
| ADCS subsystem | 71.4 | |
| Power Subsystem | 75.9 | |
| OBC | 77.3 | |
| Camera | 77.1 | |
| Lens | 77.3 |
| Optical Sensor | |
|---|---|
| Sensor tech | CCD |
| # pixels | 1296 × 966 |
| Pixel size (m) | 3.75 |
| Digitalization (bits) | 8/12 |
| Power consumption | 12 VDC/8W |
| Shutter exposure (ms) | min. 6.5 |
| LENS | |
| Focal length (mm) | 75 |
| Aperture (f/#) | f/2.8 |
| Angle of view | D 12 |
| Weight (g) | 765 |
| Diameter × length (mm) | 36 × 64.3 |
| Optical parameters | Bands performance | ||||
|---|---|---|---|---|---|
| Swath in (km): | 34.7 | ||||
| Max. aperture of the lens in (mm): | 33.6 | ||||
| Studied Bands: | 475 (nm) | 555 (nm) | 650 (nm) | 710 (nm) | 870 (nm) |
| Aperture required for each band to satisfy Rayleigh criterion in (mm): | 8.9 | 10.4 | 12.2 | 13.3 | 16.3 |
| GSD for each band after Rayleigh criterion in (m): | 26.8 | 26.78 | 26.78 | 26.78 | 26.78 |
| SNR for each band in (dB): | 37.3 | 40.4 | 41.2 | 41.6 | 36.9 |
| Consued Power | TA | GS | All Orbit | ||
|---|---|---|---|---|---|
| Typical (W) | Max. (W) | ||||
| Optical payload | - | 6 | |||
| GNNS-R payload | 1.5 | 2 | |||
| Battery heater | 0.5 | 2.5 | |||
| ADCS | 0.5 | 2.5 | |||
| S-band TX | 8 | 12 | |||
| VHF TX | 2.9 | 3.1 | |||
| Primary OBC | 2.3 | 2.3 | |||
| Secondary OBC | 0.2 | 0.9 | |||
| Operational Temperature (°C) | ||
|---|---|---|
| Device | min. | max. |
| 6U Chasis | −40 | 85 |
| Solar panels | −40 | 85 |
| EPS | −40 | 125 |
| Batteries | 0 | 45 |
| ADCS | −40 | 80 |
| OBC | −40 | 60 |
| S-band TX | −40 | 85 |
| Optical payload | −40 | 60 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castellví, J.; Camps, A.; Corbera, J.; Alamús, R. 3Cat-3/MOTS Nanosatellite Mission for Optical Multispectral and GNSS-R Earth Observation: Concept and Analysis. Sensors 2018, 18, 140. https://doi.org/10.3390/s18010140
Castellví J, Camps A, Corbera J, Alamús R. 3Cat-3/MOTS Nanosatellite Mission for Optical Multispectral and GNSS-R Earth Observation: Concept and Analysis. Sensors. 2018; 18(1):140. https://doi.org/10.3390/s18010140
Chicago/Turabian StyleCastellví, Jordi, Adriano Camps, Jordi Corbera, and Ramon Alamús. 2018. "3Cat-3/MOTS Nanosatellite Mission for Optical Multispectral and GNSS-R Earth Observation: Concept and Analysis" Sensors 18, no. 1: 140. https://doi.org/10.3390/s18010140
APA StyleCastellví, J., Camps, A., Corbera, J., & Alamús, R. (2018). 3Cat-3/MOTS Nanosatellite Mission for Optical Multispectral and GNSS-R Earth Observation: Concept and Analysis. Sensors, 18(1), 140. https://doi.org/10.3390/s18010140