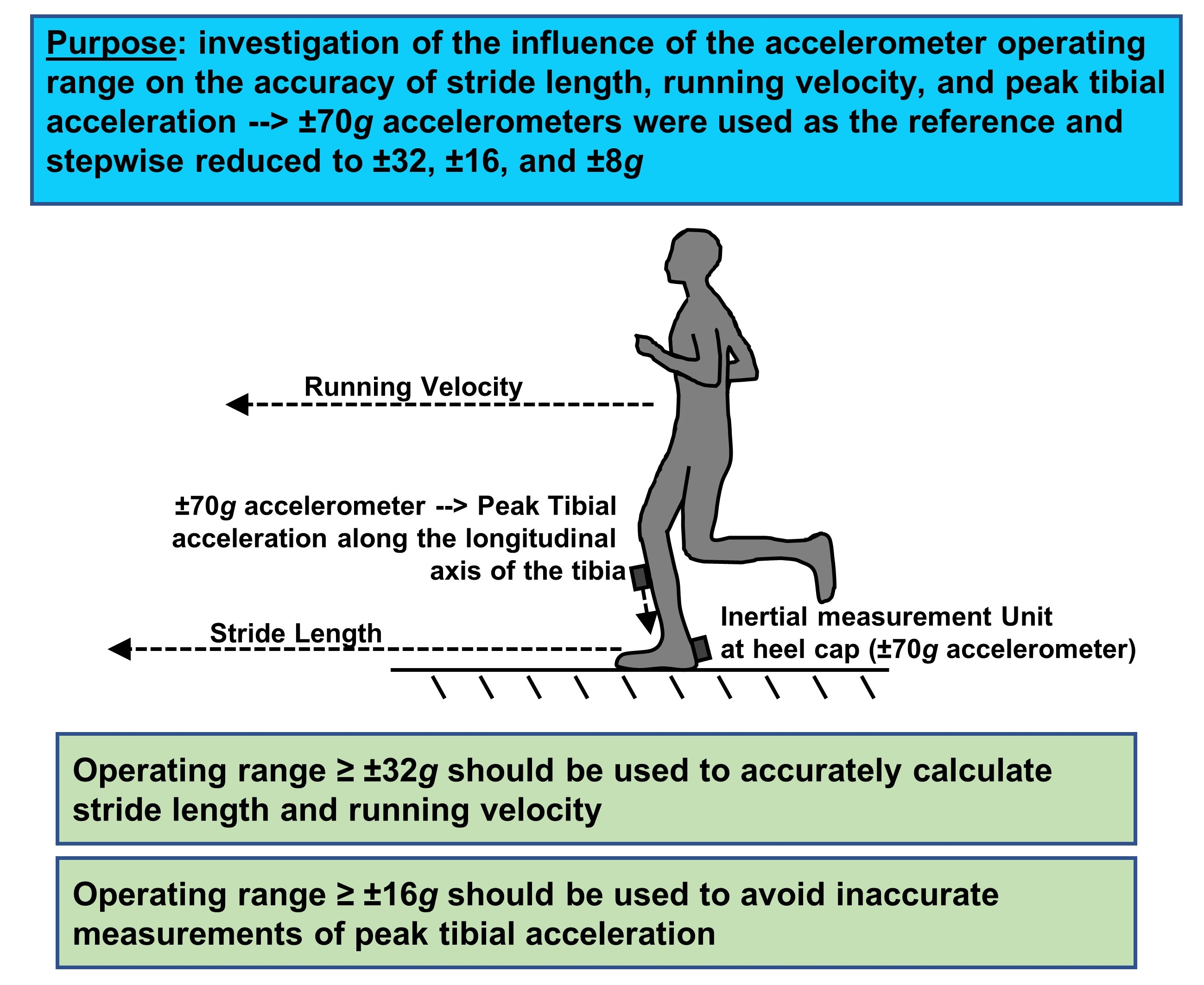
The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration during Running


Abstract
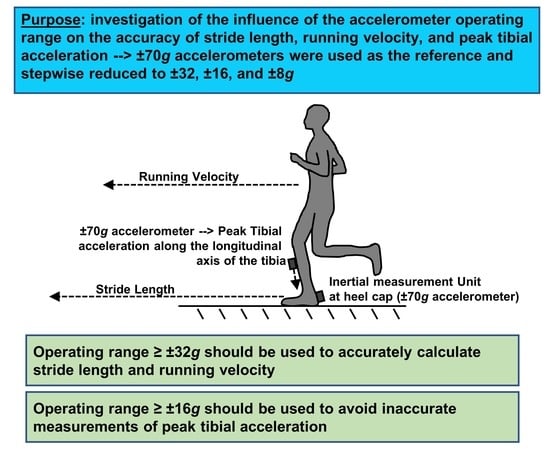
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Test Procedure
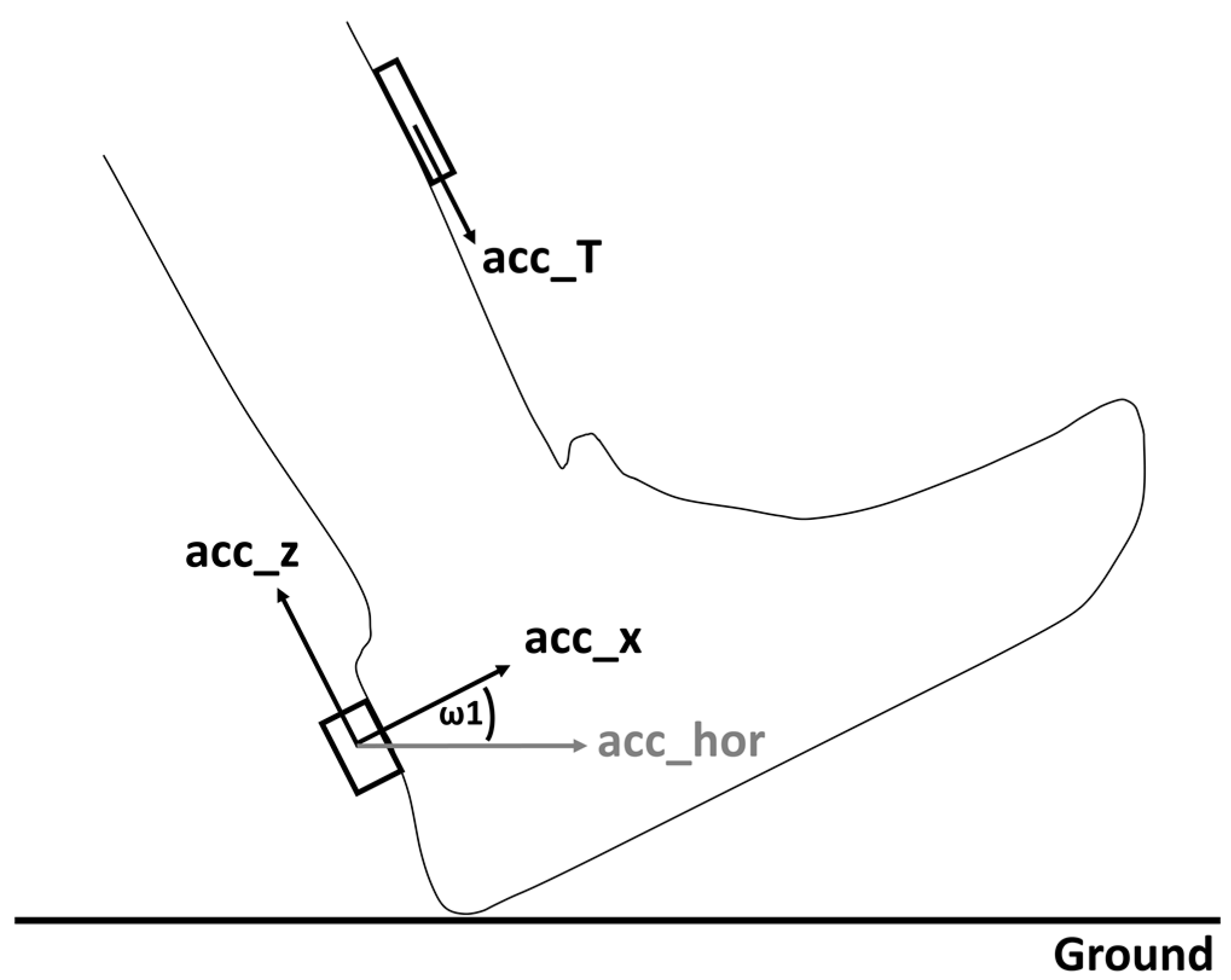
2.3. Experimental Setup
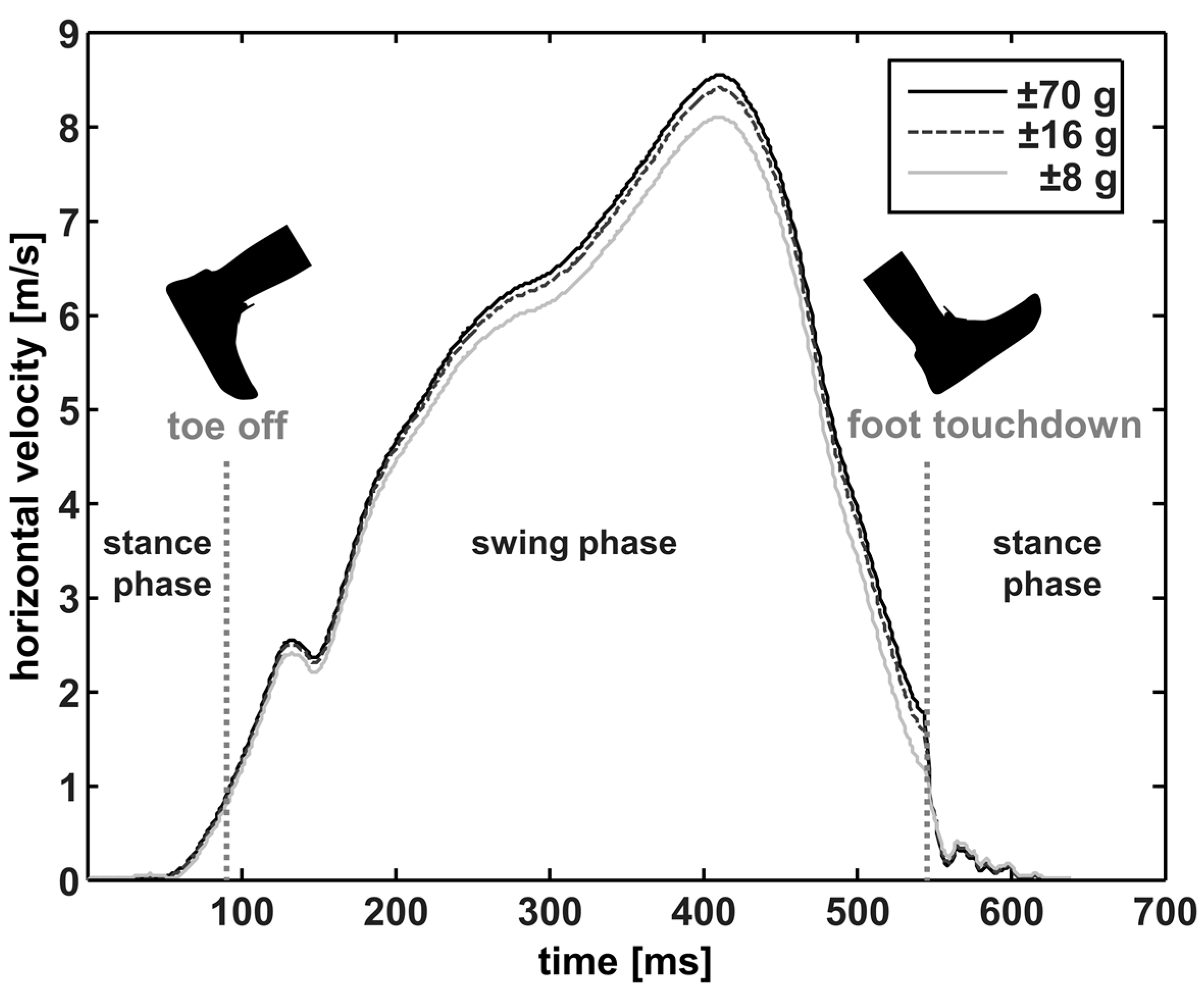
2.4. Data Analyses
2.5. Footwear Conditions
2.6. Statistical Analyses
3. Results
3.1. Footwear Characteristics
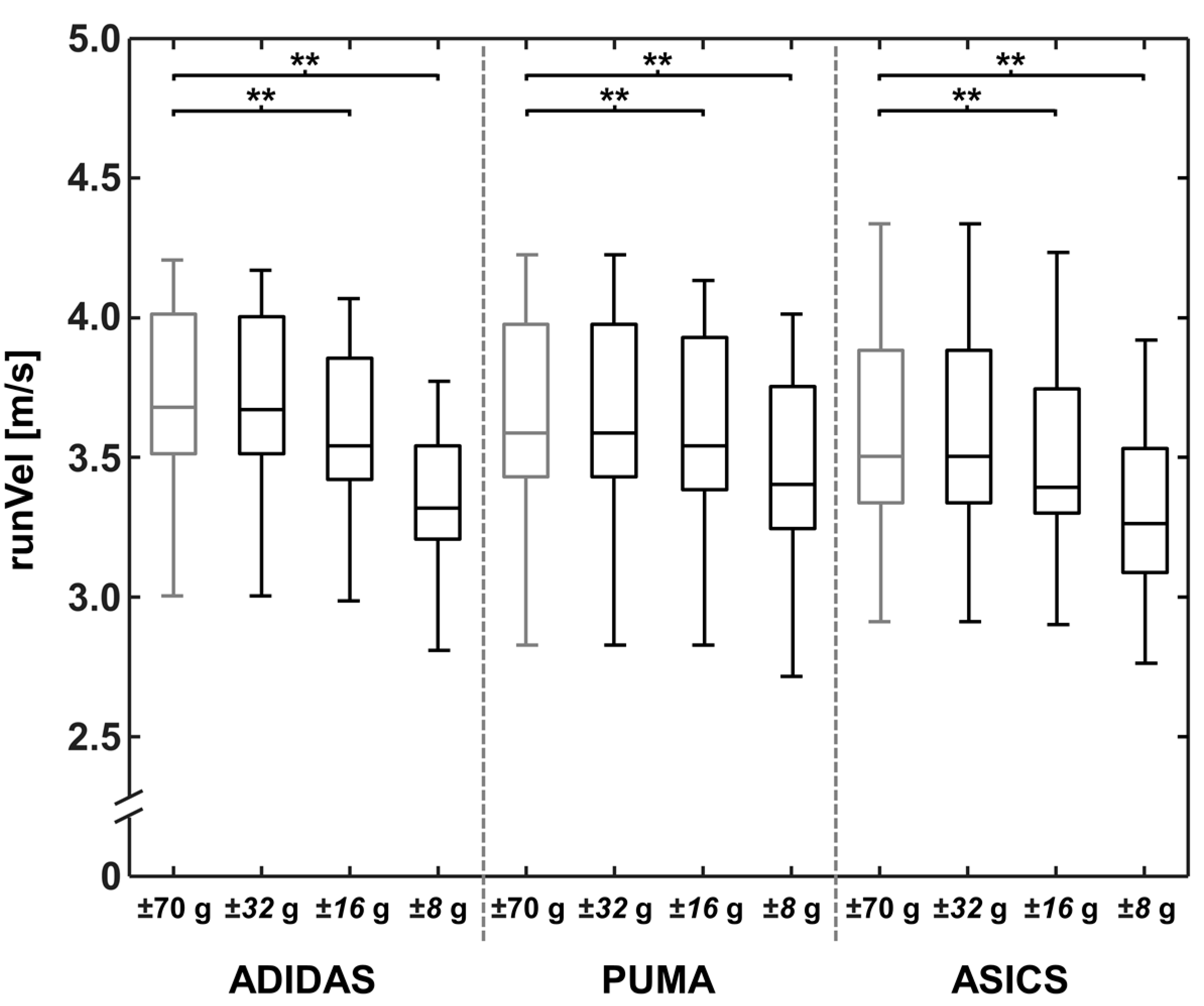
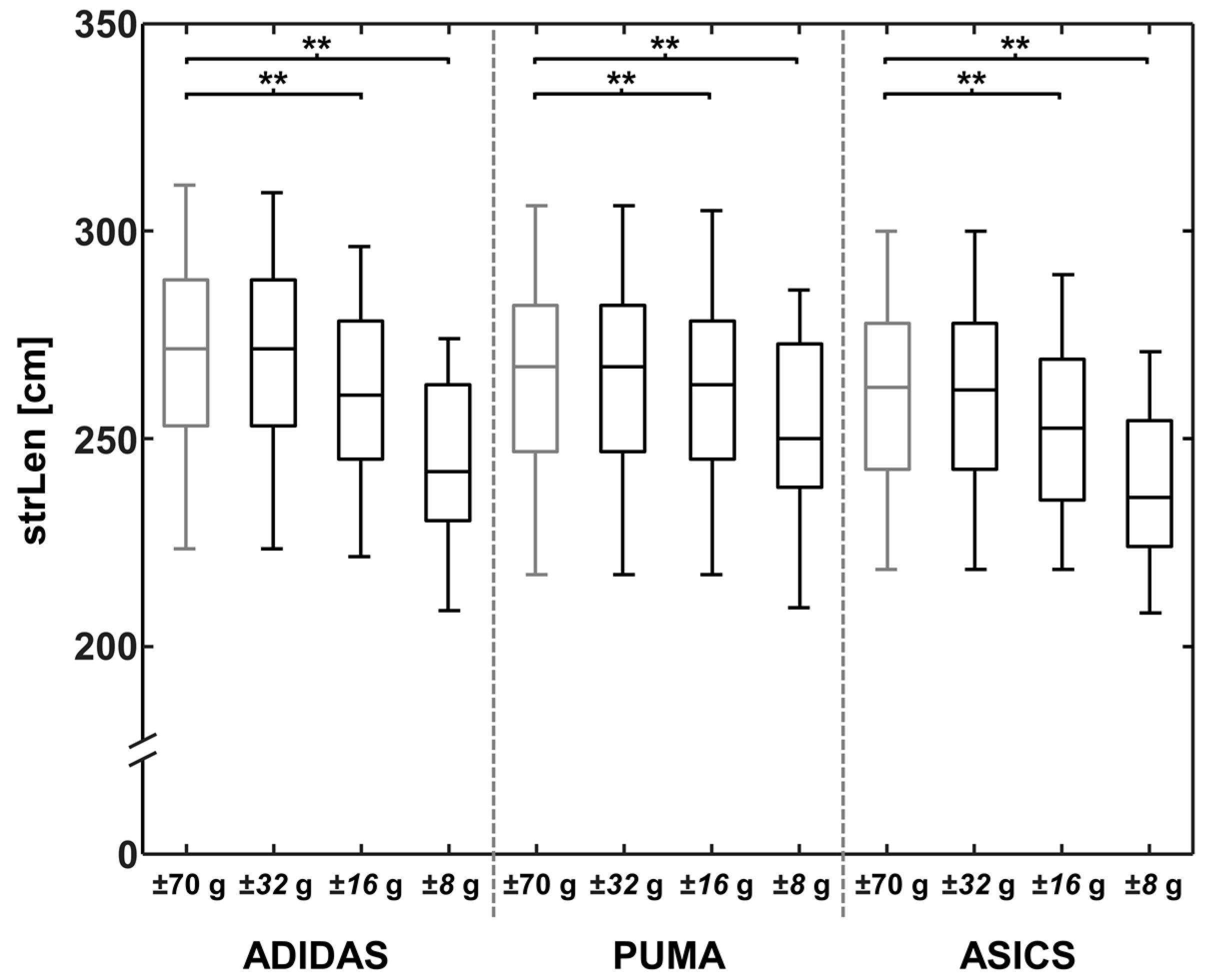
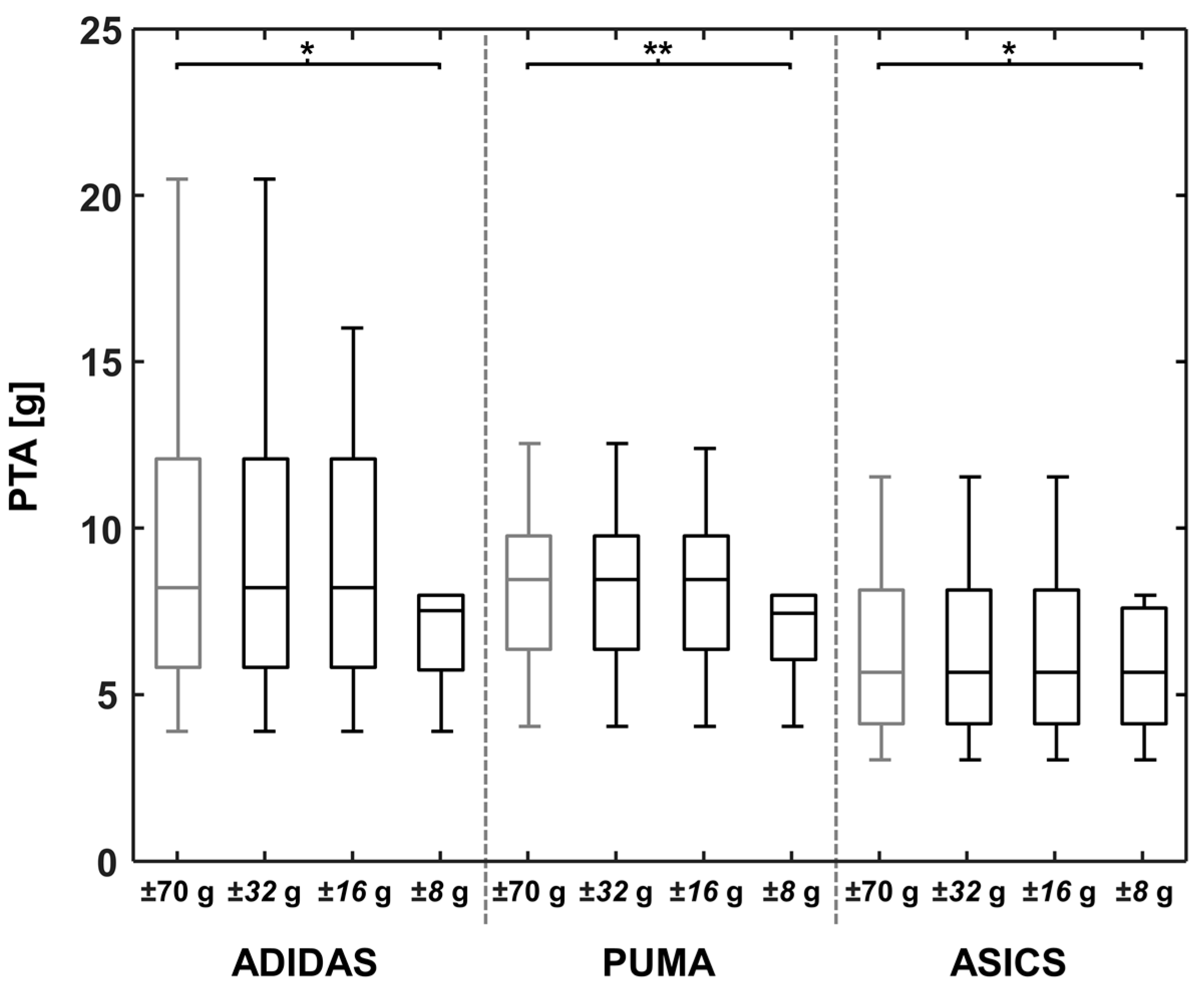
3.2. Biomechanical Parameters: Stride Length, Running Velocity, and Peak Tibial Acceleration
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis. Measurement 2009, 42, 978–988. [Google Scholar] [CrossRef]
- Mayagoitia, R.E.; Nene, A.V.; Veltink, P.H. Accelerometer and rate gyroscope measurement of kinematics: An inexpensive alternative to optical motion analysis systems. J. Biomech. 2002, 35, 537–542. [Google Scholar] [CrossRef]
- Mitschke, C.; Öhmichen, M.; Milani, T.L. A single gyroscope can be used to accurately determine peak eversion velocity during locomotion at different speeds and in various shoes. Appl. Sci. 2017, 7, 659. [Google Scholar] [CrossRef]
- Mitschke, C.; Heß, T.; Milani, T.L. Which method detects foot strike in rearfoot and forefoot runners accurately when using an inertial measurement unit? Appl. Sci. 2017, 7, 959. [Google Scholar] [CrossRef]
- Shih, Y.; Ho, C.-S.; Shiang, T.-Y. Measuring kinematic changes of the foot using a gyro sensor during intense running. J. Sports Sci. 2014, 32, 550–566. [Google Scholar] [CrossRef] [PubMed]
- Clark, R.A.; Bartold, S.; Bryant, A.L. Tibial acceleration variability during consecutive gait cycles is influenced by the menstrual cycle. Clin. Biomech. 2010, 25, 557–562. [Google Scholar] [CrossRef] [PubMed]
- Chambon, N.; Sevrez, V.; Ly, Q.H.; Guéguen, N.; Berton, E.; Rao, G. Aging of running shoes and its effect on mechanical and biomechanical variables: Implications for runners. J. Sports Sci. 2014, 32, 1013–1022. [Google Scholar] [CrossRef] [PubMed]
- Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum. Mov. Sci. 2000, 19, 139–151. [Google Scholar] [CrossRef]
- Montgomery, G.; Abt, G.; Dobson, C.; Smith, T.; Ditroilo, M. Tibial impacts and muscle activation during walking, jogging and running when performed overground, and on motorised and non-motorised treadmills. Gait Posture 2016, 49, 120–126. [Google Scholar] [CrossRef] [PubMed]
- Gruber, A.H.; Boyer, K.A.; Derrick, T.R.; Hamill, J. Impact shock frequency components and attenuation in rearfoot and forefoot running. J. Sport Health Sci. 2014, 3, 113–121. [Google Scholar] [CrossRef]
- Milani, T.L.; Hennig, E.M.; Lafortune, M. Perceptual and biomechanical variables for running in identical shoe constructions with varying midsole hardness. Clin. Biomech. 1997, 12, 294–300. [Google Scholar] [CrossRef]
- Mercer, J.A.; Vance, J.; Hreljac, A.; Hamill, J. Relationship between shock attenuation and stride length during running at different velocities. Eur. J. Appl. Physiol. 2002, 87, 403–408. [Google Scholar] [CrossRef] [PubMed]
- Mercer, J.A.; Bates, B.T.; Dufek, J.S.; Hreljac, A. Characteristics of shock attenuation during fatigued running. J. Sports Sci. 2003, 21, 911–919. [Google Scholar] [CrossRef] [PubMed]
- Heidenfelder, J.; Sterzing, T.; Milani, T.L. Systematically modified crash-pad reduces impact shock in running shoes. Footwear Sci. 2010, 2, 85–91. [Google Scholar] [CrossRef]
- Meardon, S.; Hamill, J.; Derrick, T.R. Running injury and stride time variability over a prolonged run. Gait Posture 2011, 33, 36–40. [Google Scholar] [CrossRef] [PubMed]
- Oriwol, D.; Sterzing, T.; Milani, T.L. The position of medial dual density midsole elements in running shoes does not influence biomechanical variables. Footwear Sci. 2011, 3, 107–116. [Google Scholar] [CrossRef]
- Giandolini, M.; Horvais, N.; Farges, Y.; Samozino, P.; Morin, J.B. Impact reduction through long-term intervention in recreational runners: Midfoot strike pattern versus low-drop/low-heel height footwear. Eur. J. Appl. Physiol. 2013, 113, 2077–2090. [Google Scholar] [CrossRef] [PubMed]
- Sinclair, J.; Hobbs, S.J.; Protheroe, L.; Edmundson, C.J.; Greenhalgh, A. Determination of gait events using an externally mounted shank accelerometer. J. Appl. Biomech. 2013, 29, 118–122. [Google Scholar] [CrossRef] [PubMed]
- García-Pérez, J.A.; Pérez-Soriano, P.; Llana Belloch, S.; Lucas-Cuevas, Á.G.; Sánchez-Zuriaga, D. Effects of treadmill running and fatigue on impact acceleration in distance running. Sports Biomech. 2014, 13, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of walking features from foot inertial sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [Google Scholar] [CrossRef] [PubMed]
- Mercer, J.A.; Chona, C. Stride length-velocity relationship during running with body weight support. J. Sport Health Sci. 2015, 4, 127–131. [Google Scholar] [CrossRef]
- Yang, S.; Mohr, C.; Li, Q. Ambulatory running speed estimation using an inertial sensor. Gait Posture 2011, 34, 462–466. [Google Scholar] [CrossRef] [PubMed]
- Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J.H. Continuous three dimensional analysis of running mechanics during a marathon by means of inertial magnetic measurement units to objectify changes in running mechanics. J. Biomech. 2016, 49, 3362–3367. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, T.; Saito, H.; Koike, E.; Nitta, K. A preliminary test of measurement of joint angles and stride length with wireless inertial sensors for wearable gait evaluation system. Comput. Intell. Neurosci. 2011, 2011, 6. [Google Scholar] [CrossRef] [PubMed]
- Provot, T.; Chiementin, X.; Oudin, E.; Bolaers, F.; Murer, S. Validation of a high sampling rate inertial measurement unit for acceleration during running. Sensors 2017, 17, 1958. [Google Scholar] [CrossRef] [PubMed]
- Fong, D.T.P.; Chan, Y.Y. The use of wearable inertial motion sensors in human lower limb biomechanics studies: A systematic review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Li, Q. Inertial sensor-based methods in walking speed estimation: A systematic review. Sensors 2012, 12, 6102–6116. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, J.C.; González, R.C.; Alvarez, D.; López, A.M.; Rodríguez-Uría, J. Multisensor approach to walking distance estimation with foot inertial sensing. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology, Lyon, France, 22–26 August 2007; pp. 5719–5722. [Google Scholar]
- Jasiewicz, J.M.; Allum, J.H.J.; Middleton, J.W.; Barriskill, A.; Condie, P.; Purcell, B.; Li, R.C.T. Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals. Gait Posture 2006, 24, 502–509. [Google Scholar] [CrossRef] [PubMed]
- Zifchock, R.A.; Davis, I.; Higginson, J.; McCaw, S.; Royer, T. Side-to-side differences in overuse running injury susceptibility: A retrospective study. Hum. Mov. Sci. 2008, 27, 888–902. [Google Scholar] [CrossRef] [PubMed]
- Mitschke, C.; Zaumseil, F.; Milani, T.L. The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running. Comput. Methods Biomech. Biomed. Eng. 2017, 20, 1502–1511. [Google Scholar] [CrossRef] [PubMed]
- Ziebart, C.; Giangregorio, L.M.; Gibbs, J.C.; Levine, I.C.; Tung, J.; Laing, A.C. Measurement of peak impact loads differ between accelerometers—Effects of system operating range and sampling rate. J. Biomech. 2017, 58, 222–226. [Google Scholar] [CrossRef] [PubMed]
- Lieberman, D.E.; Venkadesan, M.; Werbel, W.A.; Daoud, A.I.; D’Andrea, S.; Davis, I.S.; Mang’eni, R.O.; Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 2010, 463, 531–535. [Google Scholar] [CrossRef] [PubMed]
- Hennig, E.M.; Milani, T.L.; Lafortune, M. Use of ground reaction force parameters in predicting peak tibial accelerations in running. J. Appl. Biomech. 1993, 9, 214–306. [Google Scholar] [CrossRef] [PubMed]
- Maiwald, C.; Dannemann, A.; Gaudel, J.; Oriwol, D. A simple method to detect stride intervals in continuous acceleration and gyroscope data recorded during treadmill running. Footwear Sci. 2015, 7, 143–144. [Google Scholar] [CrossRef]
- Peruzzi, A.; Della Croce, U.; Cereatti, A. Estimation of stride length in level walking using an inertial measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech. 2011, 44, 1991–1994. [Google Scholar] [CrossRef] [PubMed]
- Hamacher, D.; Hamacher, D.; Taylor, W.R.; Singh, N.B.; Schega, L. Towards clinical application: Repetitive sensor position re-calibration for improved reliability of gait parameters. Gait Posture 2014, 39, 1146–1148. [Google Scholar] [CrossRef] [PubMed]
- Schwanitz, S.; Odenwald, S. Long-term cushioning properties of running shoes (P152). In The Engineering of Sport 7; Springer: Paris, France, 2008; pp. 95–100. [Google Scholar]
- Brückner, K.; Odenwald, S.; Schwanitz, S.; Heidenfelder, J.; Milani, T. Polyurethane-foam midsoles in running shoes—Impact energy and damping. Procedia Eng. 2010, 2, 2789–2793. [Google Scholar] [CrossRef]
- Heidenfelder, J. Entwicklung Eines Dynamischen Tests zur Prüfung der Rückfußdämpfung von Laufschuhen Mittels Biomechanischer Messmethoden; TU Chemnitz: Chemnitz, Germany, 2011. [Google Scholar]
- Cohen, J. Quantitative methods in psychology. Psychol. Bull. 1992, 112, 155–159. [Google Scholar] [CrossRef] [PubMed]
- Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Tröster, G. Monitoring kinematic changes with fatigue in running using body-worn sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Mcnair, P.J.; Marshall, R.N. Kinematic and kinetic parameters associated with running in different shoes. Br. J. Sports Med. 1994, 28, 256–261. [Google Scholar] [CrossRef] [PubMed]
- Lucas-Cuevas, A.G.; Encarnación-Martínez, A.; Camacho-García, A.; Llana-Belloch, S.; Pérez-Soriano, P. The location of the tibial accelerometer does influence impact acceleration parameters during running. J. Sports Sci. 2017, 35, 1734–1738. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Footwear Condition | Stiffness (N/mm) | |
|---|---|---|
| Mean | SD | |
| ADIDAS | 210.3 | 0.4 |
| PUMA | 177.8 | 0.4 |
| ASICS | 156.9 | 0.1 |
| Footwear Condition | ADIDAS | PUMA | ASICS | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Operating ranges | ±70–±32 g | ±70–±16 g | ±70–±8 g | ±70–±32 g | ±70–±16 g | ±70–±8 g | ±70–±32 g | ±70–±16 g | ±70–±8 g |
| runVel | |||||||||
| MD (cm) | 0.01 | 0.13 | 0.36 | 0.00 | 0.04 | 0.18 | 0.00 | 0.09 | 0.29 |
| MD_rel (%) | 0.14 | 3.48 | 9.68 | 0.00 | 1.00 | 4.88 | 0.05 | 2.64 | 8.18 |
| p | 0.029 | <0.001 | <0.001 | 1 | <0.001 | <0.001 | 0.110 | <0.001 | <0.001 |
| Cohen’s d | - | 0.86 | 0.95 | - | 0.84 | 0.92 | - | 0.85 | 0.94 |
| RMSE (cm) | 0.01 | 0.11 | 0.27 | 0.00 | 0.03 | 0.14 | 0.00 | 0.08 | 0.22 |
| strLen | |||||||||
| MD (m/s) | 0.38 | 9.43 | 26.15 | 0.00 | 2.62 | 12.87 | 0.12 | 6.92 | 21.22 |
| MD_rel (%) | 0.14 | 3.49 | 9.68 | 0.00 | 0.99 | 4.85 | 0.05 | 2.67 | 8.17 |
| p | 0.024 | <0.001 | <0.001 | 1 | <0.001 | <0.001 | 0.096 | <0.001 | <0.001 |
| Cohen’s d | - | 0.86 | 0.95 | - | 0.84 | 0.92 | - | 0.85 | 0.94 |
| RMSE (m/s) | 0.57 | 7.75 | 19.44 | 0.00 | 2.19 | 9.88 | 0.23 | 5.75 | 15.98 |
| PTA | |||||||||
| MD (g) | 0.00 | 0.59 | 2.65 | 0.00 | 0.31 | 2.08 | 0.00 | 0.00 | 0.61 |
| MD_rel (%) | 0.00 | 6.25 | 28.17 | 0.00 | 3.48 | 23.02 | 0.00 | 0.04 | 9.76 |
| p | 1 | 0.043 | 0.002 | 1 | 0.109 | <0.001 | 1 | 0.317 | 0.005 |
| Cohen’s d | - | - | 0.65 | - | - | 0.77 | - | - | 0.60 |
| RMSE (g) | 0.00 | 1.23 | 3.39 | 0.00 | 0.83 | 2.72 | 0.00 | 0.01 | 1.13 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitschke, C.; Kiesewetter, P.; Milani, T.L. The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration during Running. Sensors 2018, 18, 130. https://doi.org/10.3390/s18010130
Mitschke C, Kiesewetter P, Milani TL. The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration during Running. Sensors. 2018; 18(1):130. https://doi.org/10.3390/s18010130
Chicago/Turabian StyleMitschke, Christian, Pierre Kiesewetter, and Thomas L. Milani. 2018. "The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration during Running" Sensors 18, no. 1: 130. https://doi.org/10.3390/s18010130
APA StyleMitschke, C., Kiesewetter, P., & Milani, T. L. (2018). The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration during Running. Sensors, 18(1), 130. https://doi.org/10.3390/s18010130