Wearable Devices for Classification of Inadequate Posture at Work Using Neural Networks


 , and
, and 
Abstract
1. Introduction
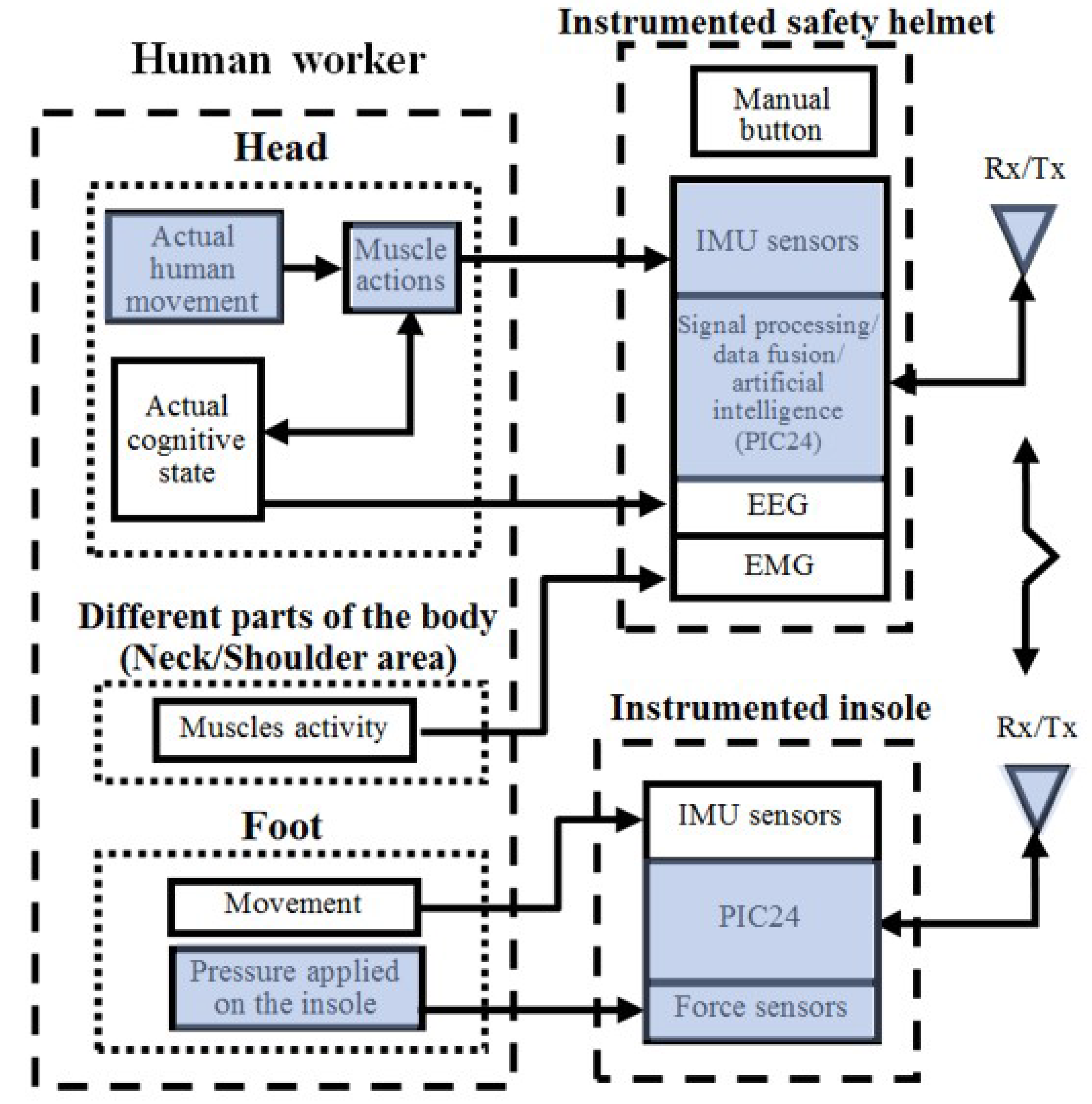
2. Design of the Measurement System
2.1. The Instrumented Safety Helmet
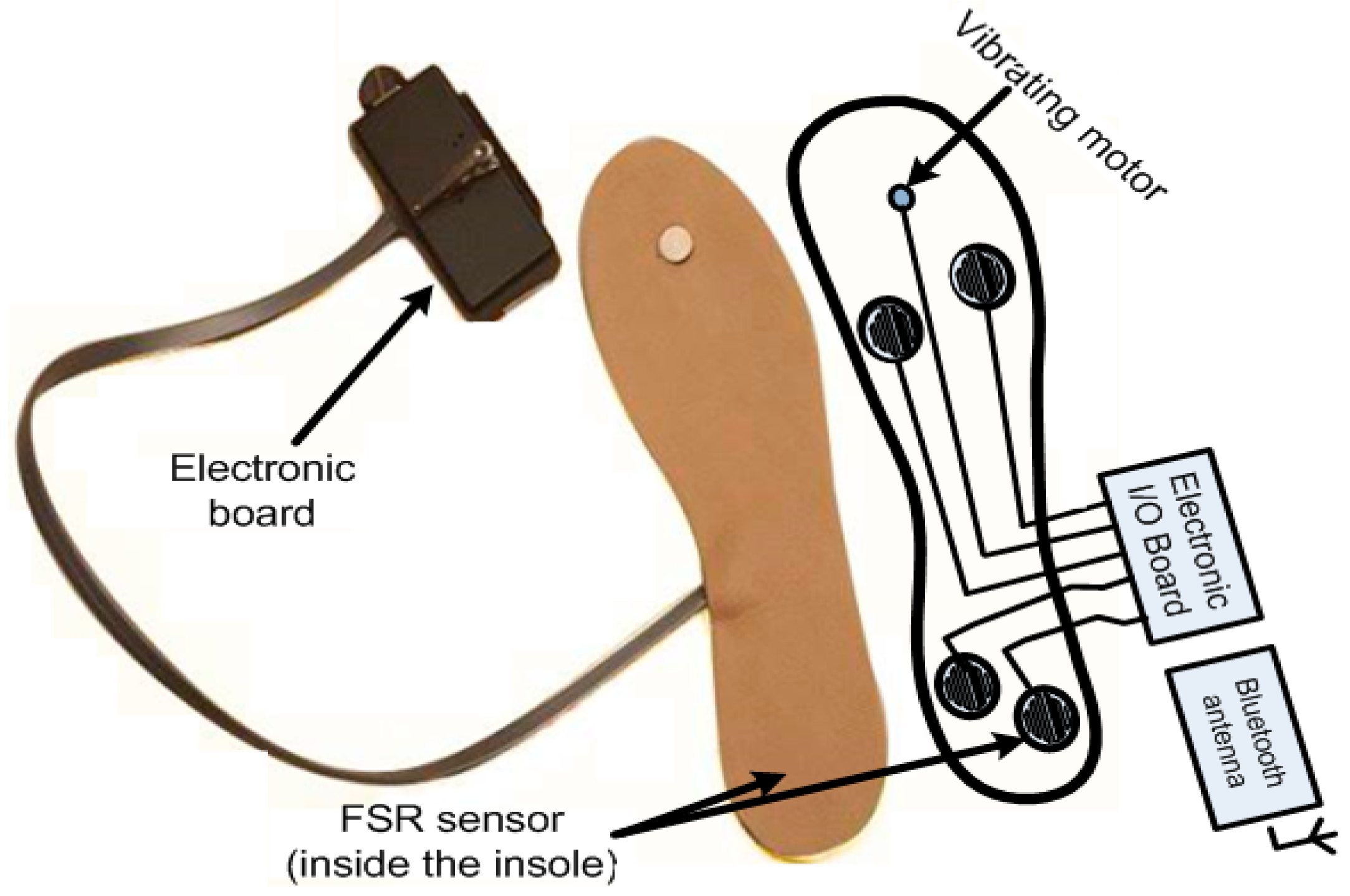
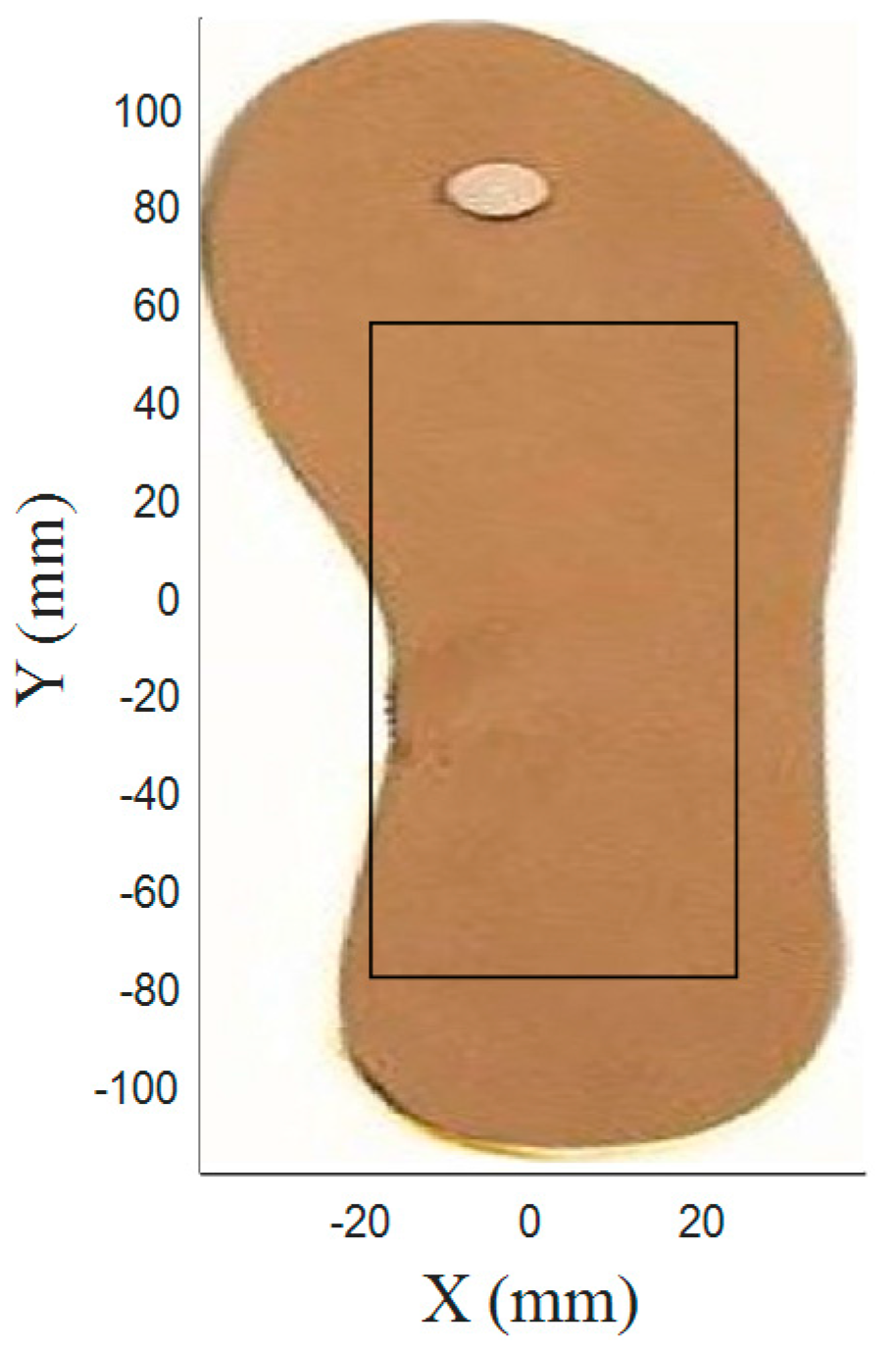
2.2. Enactive Insole Design
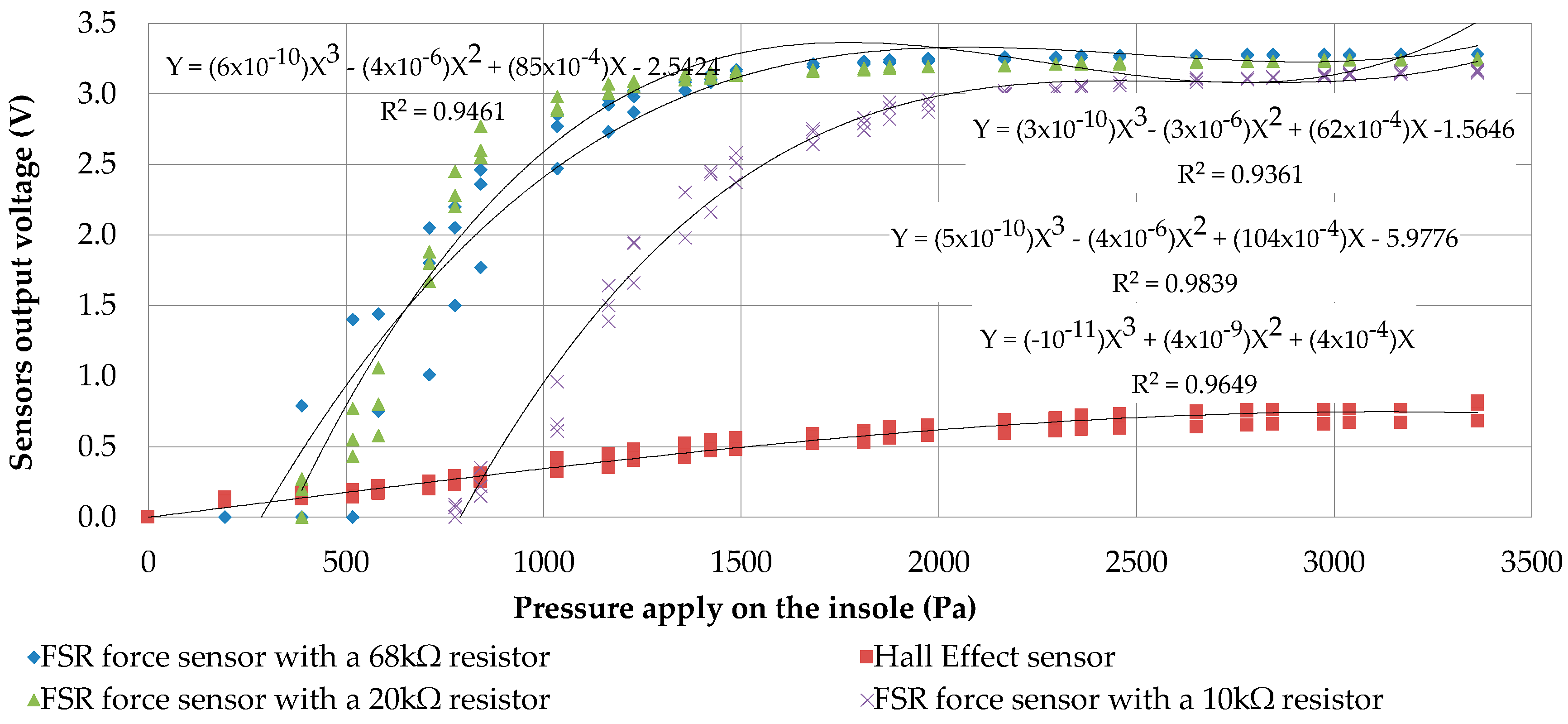
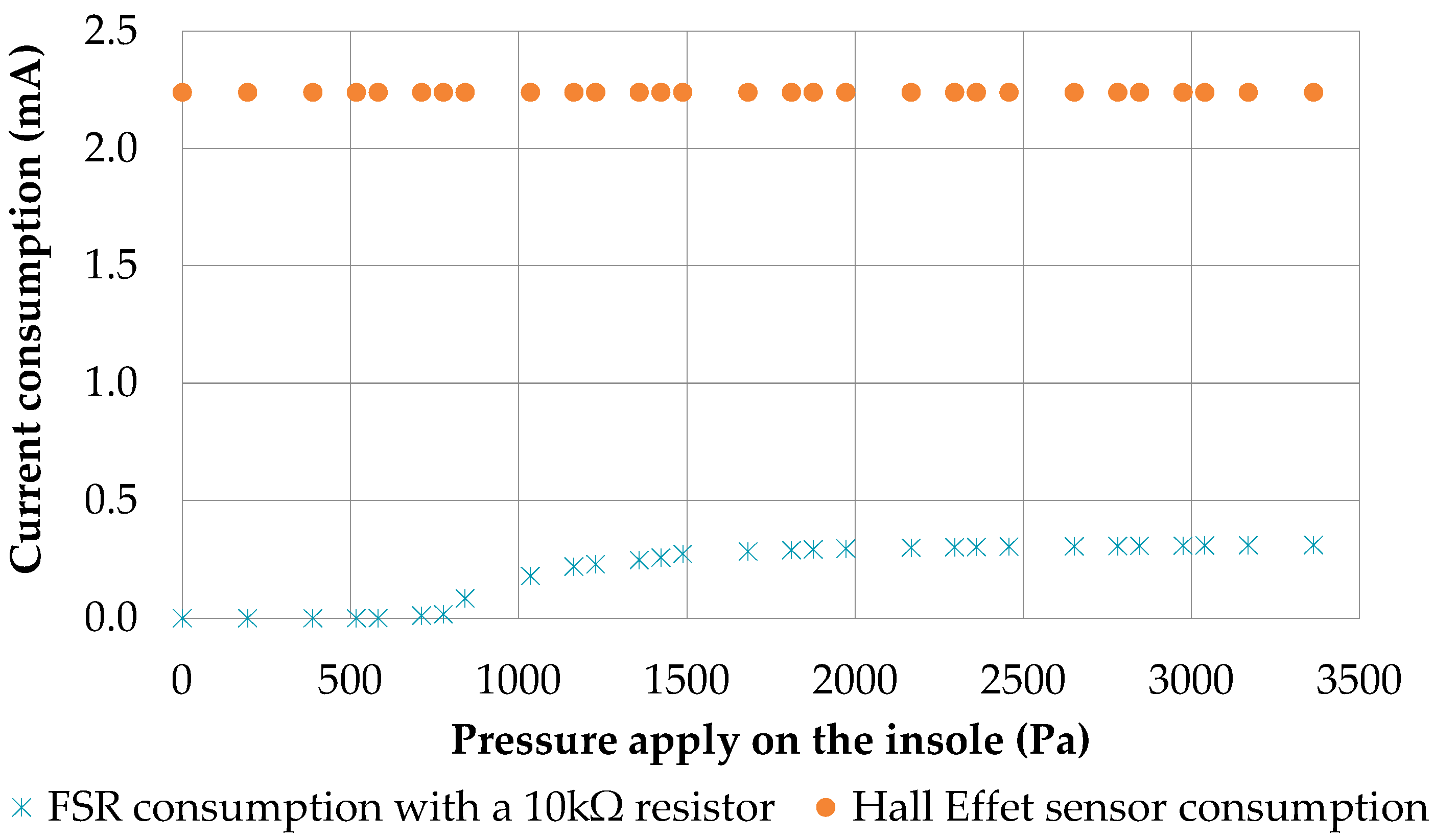
2.2.1. Comparison of Force Sensor Technologies
- The capacitive force sensor (CS8-100N, SingleTact, Los Angeles, CA, USA) has the same shape as the FSR sensor. It is ultra-thin, thus allowing its integration in an instrumented insole without any issues. Its consumption is estimated at 2.5 mA according to its specifications [47], which is rather high for a long term usage. Another disadvantage is that it costs three times more than the FSR sensor. Since the target price is around hundred dollars, lower-cost sensors (less or equal to ten dollars each) were investigated.
- Various studies have also investigated the use of an optical sensor [48,49,50,51]. To exploit this sensor for an instrumented insole, we need to integrate a light-emitting diode (LED), a phototransistor and a flexible structure that can introduce an obstruction between the LED and the phototransistor. The load over the structure adjusts the obstruction. The main issue of this technology is the current consumption of the light source, which still needs some improvements.
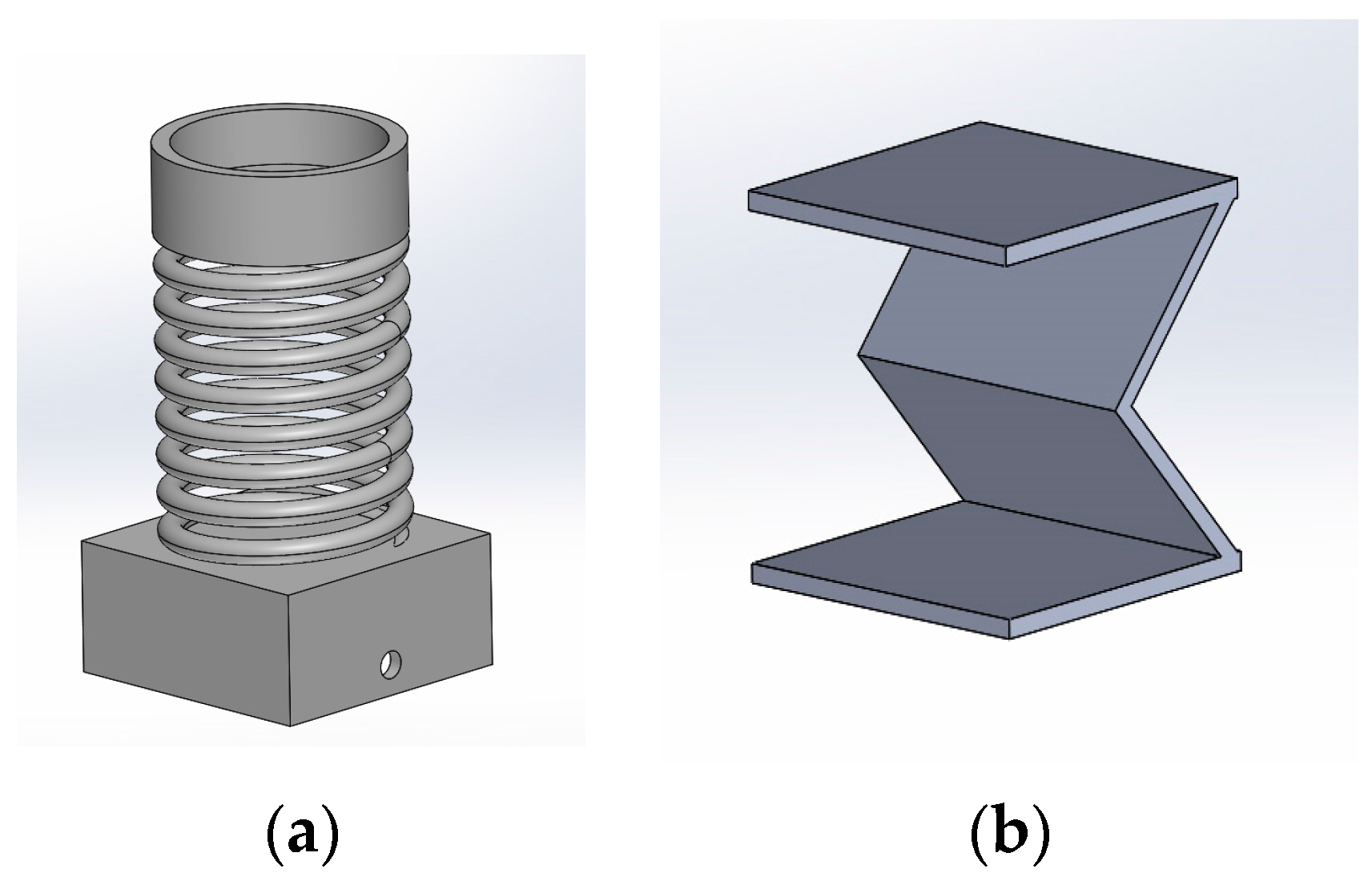
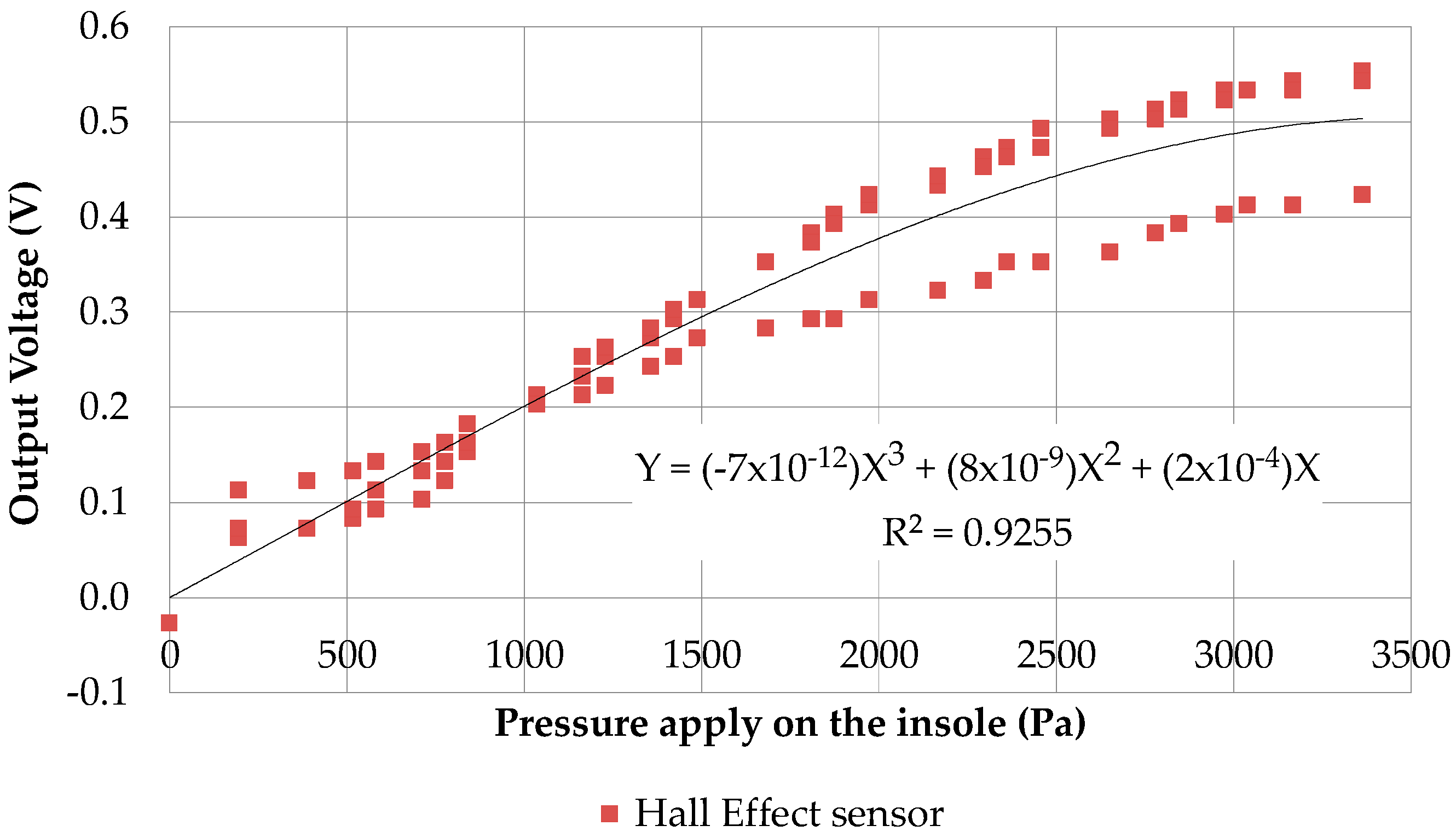
- The last type of sensor investigated is the Hall Effect sensor. Its operating is based on the shifting of a permanent magnet (N52 3 mm × 1 mm) according to a fixed Hall Effect transistor (177725z, SparkFun Electronics, Boulder, CO, USA). When the magnet is closer to the transistor, the output tension is higher.
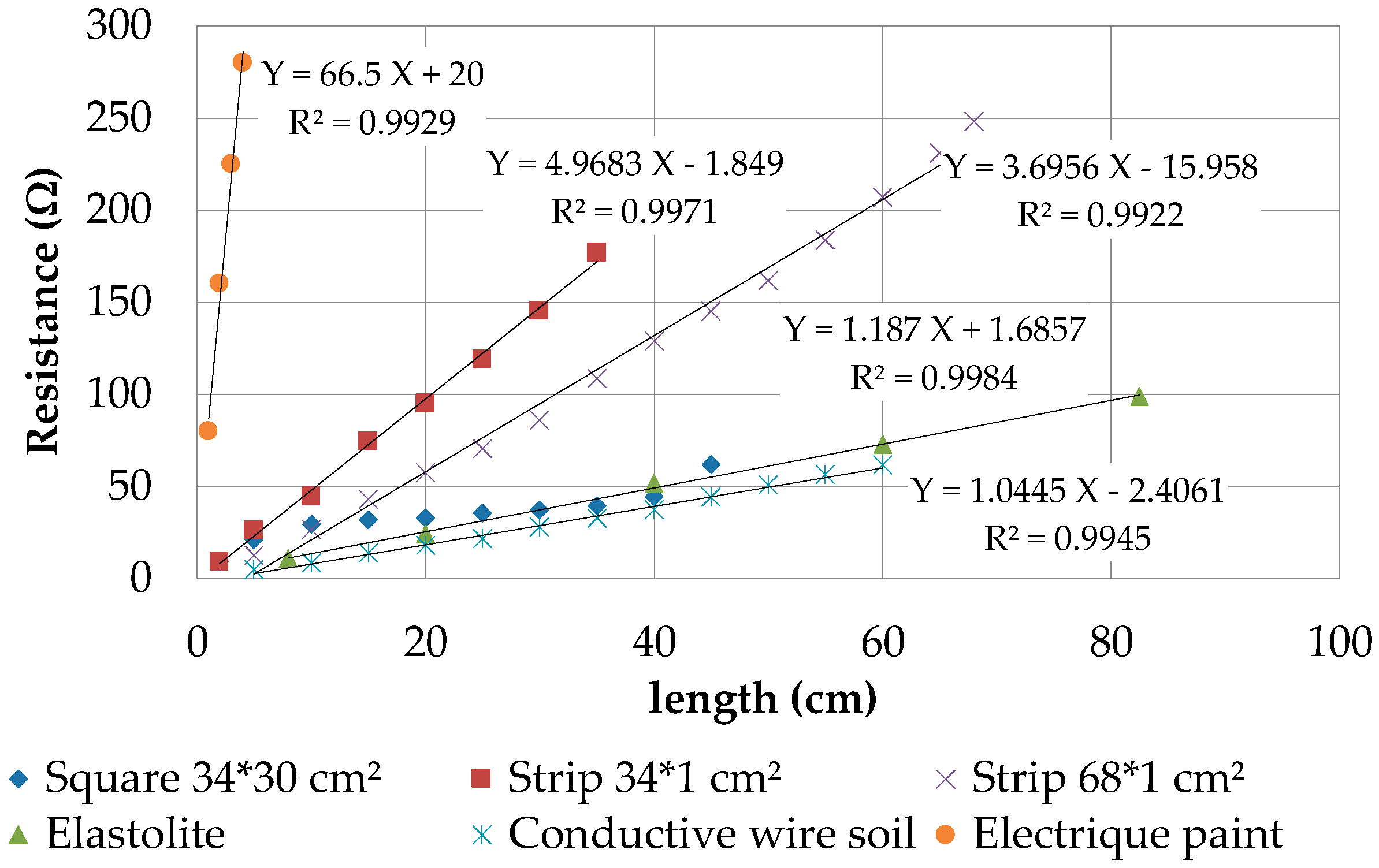
2.2.2. Characterization of Different Types of Conductive Supports
3. Experimental Procedure
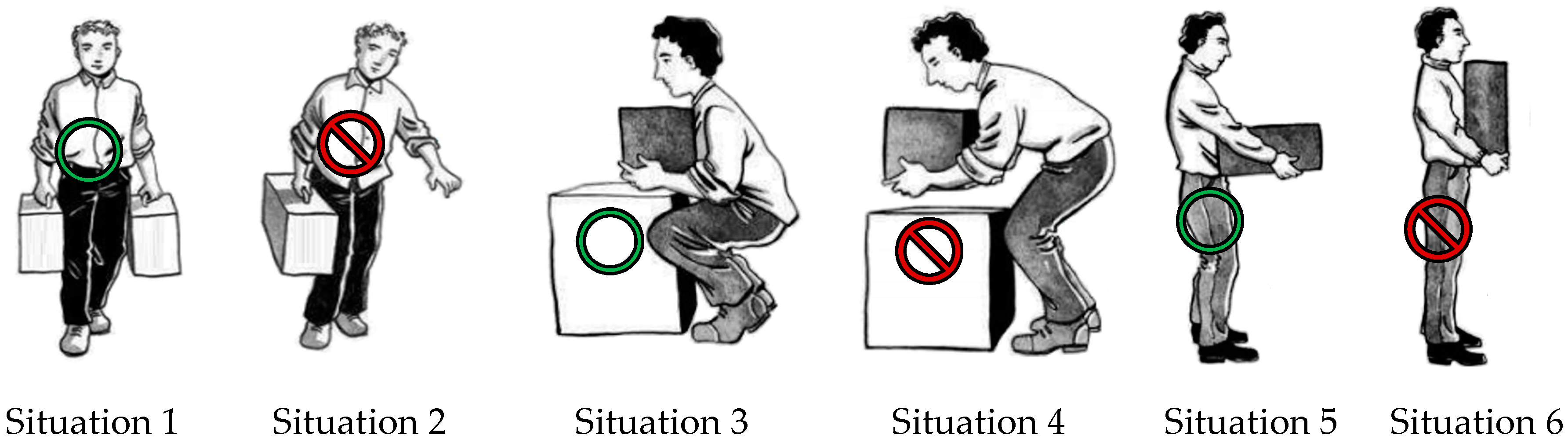
3.1. Workstation and Postures Selected for Data Acquisition
3.2. Experimental Protocol
4. Design of the Supervised Model for Posture Classification
4.1. Feature Preparation
4.1.1. The Direct Approach
4.1.2. The Graphic Approach
4.2. Dimensionality Reduction
4.2.1. The Filter Model
4.2.2. The Wrapper Model
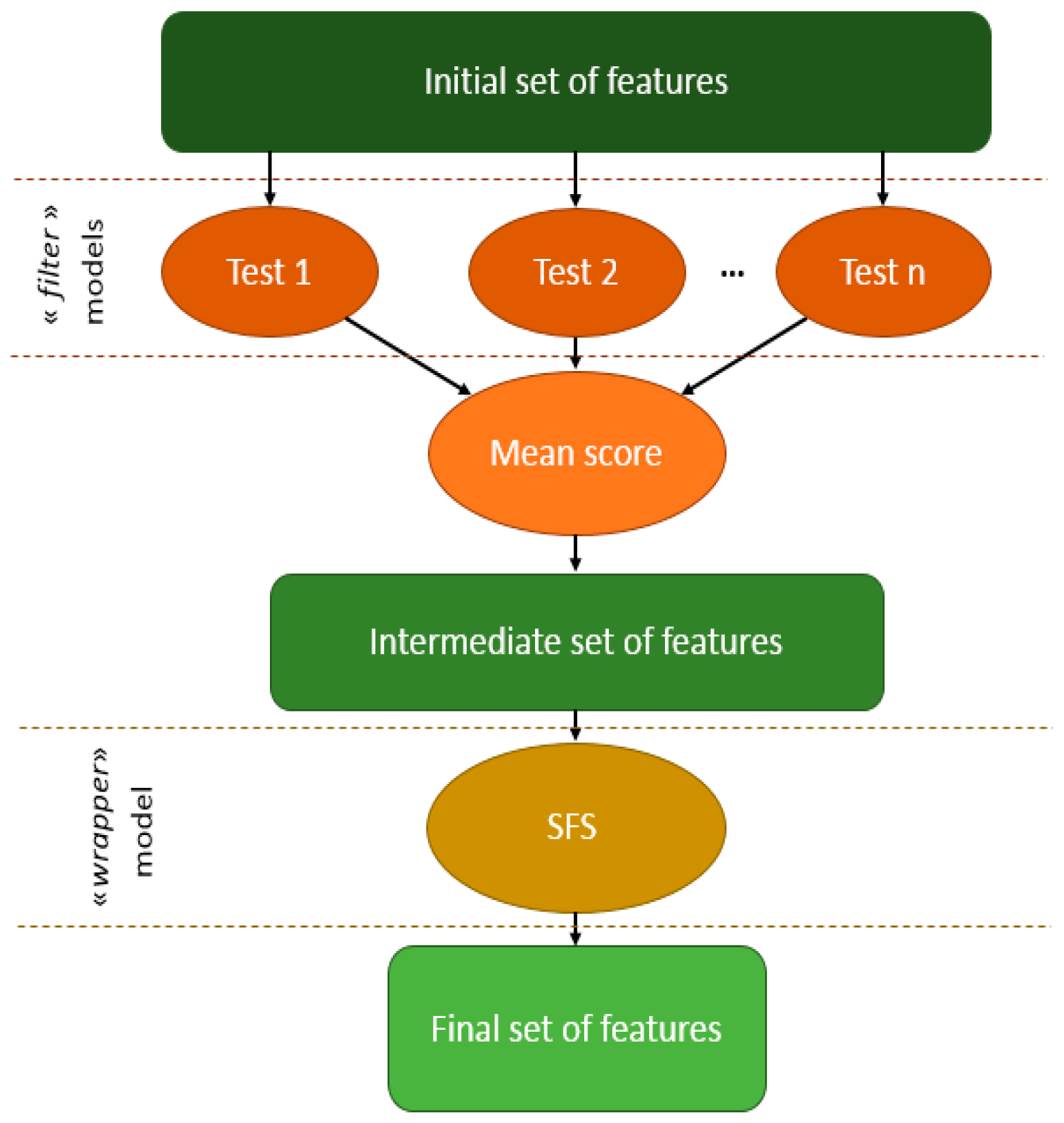
4.2.3. The Hybrid Feature Selection
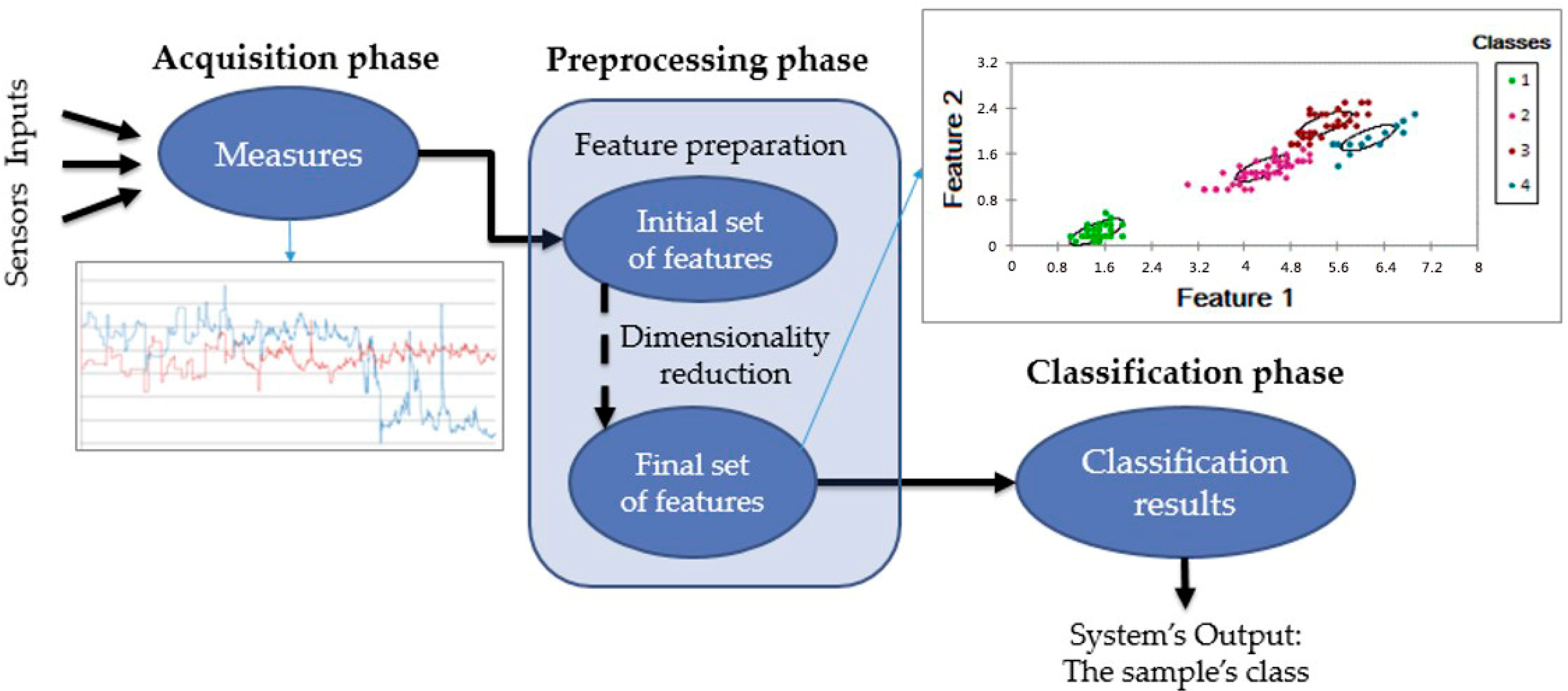
4.3. Classification Phase
- An input layer of i neurons, where i is the number of inputs (i.e., final set features);
- A hidden layer of j = 12 neurons whose activation function is the hyperbolic tangent;
- An output layer of k = 6 neurons, where k is the number of classes (posture situations presented previously). A softmax function is used to convert the output of these neurons into class probabilities [67].
5. Classification Results and Discussion
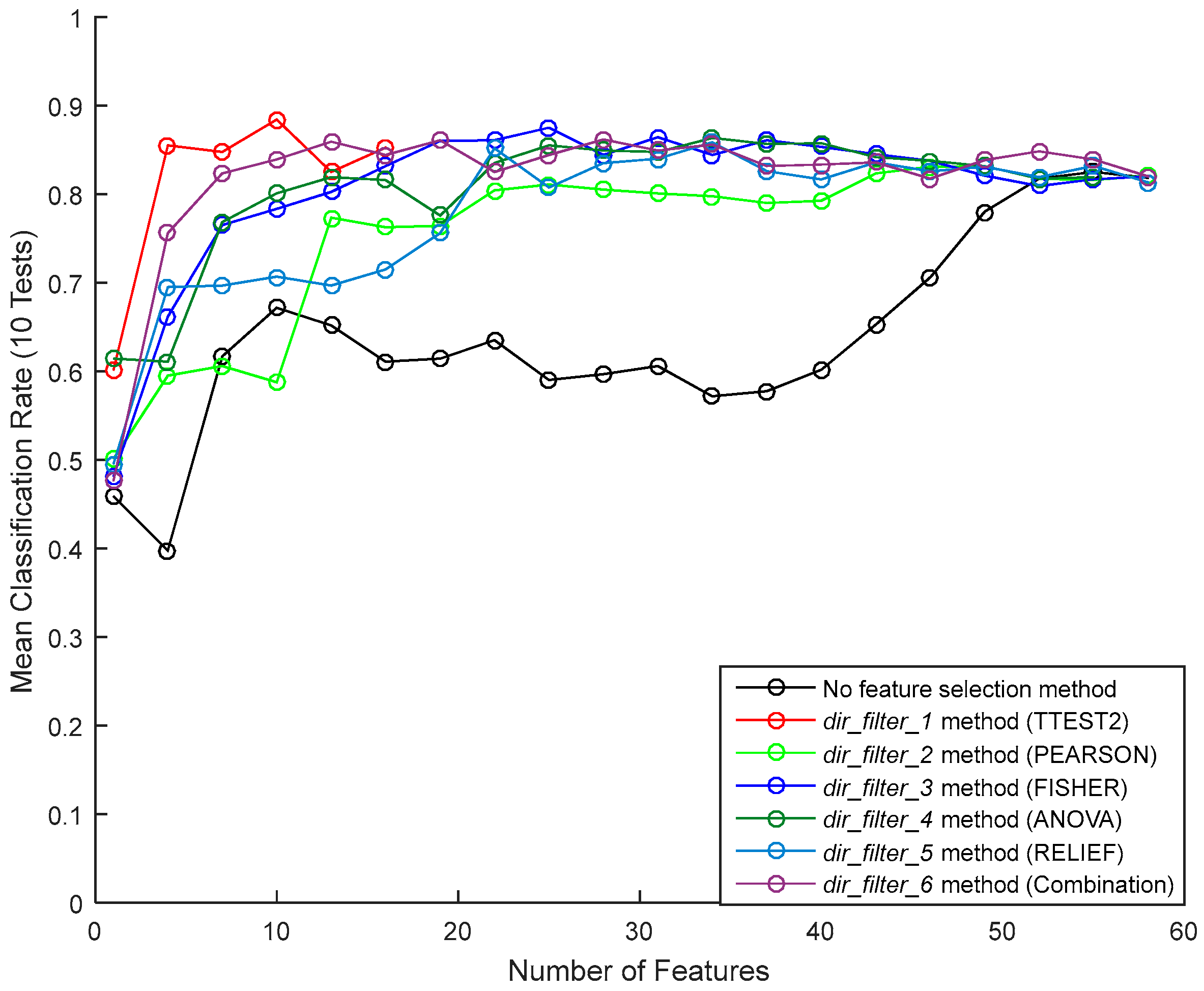
5.1. Application of the Filter Technique on the Direct Approach Features
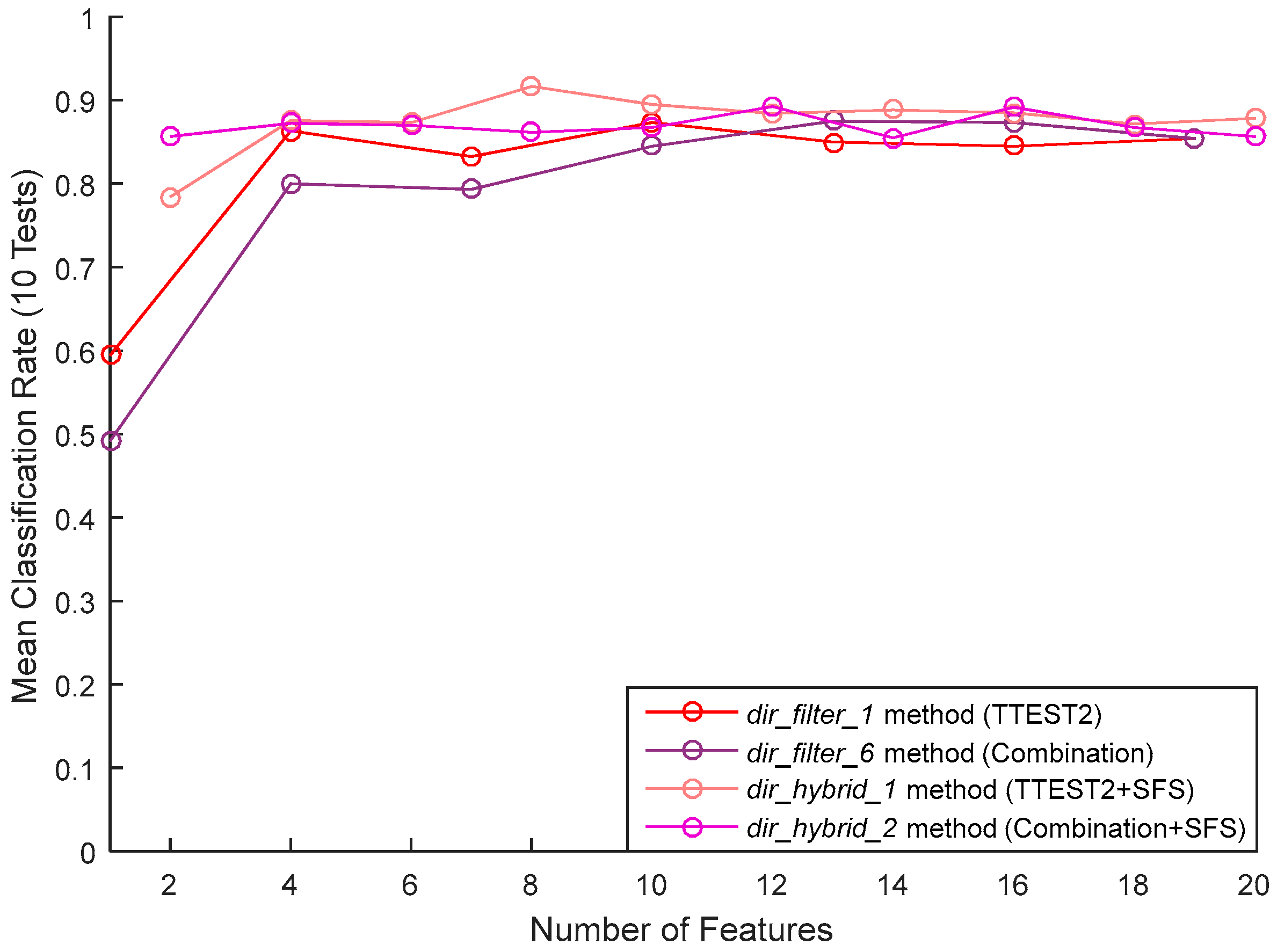
5.2. Application of the Hybrid Feature Selection on the Direct Approach Features
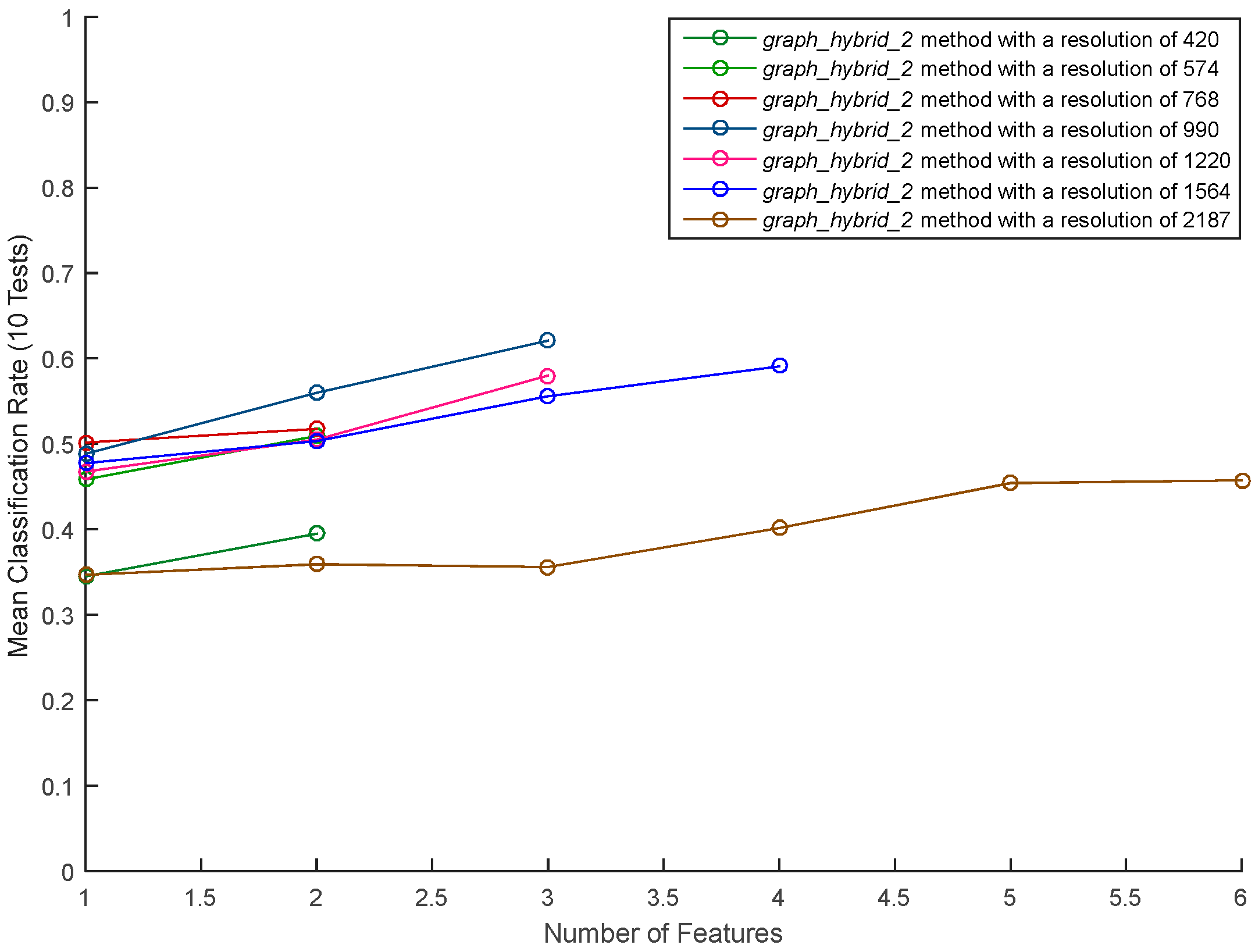
5.3. Application of the Hybrid Feature Selection on the Graphic Approach Features
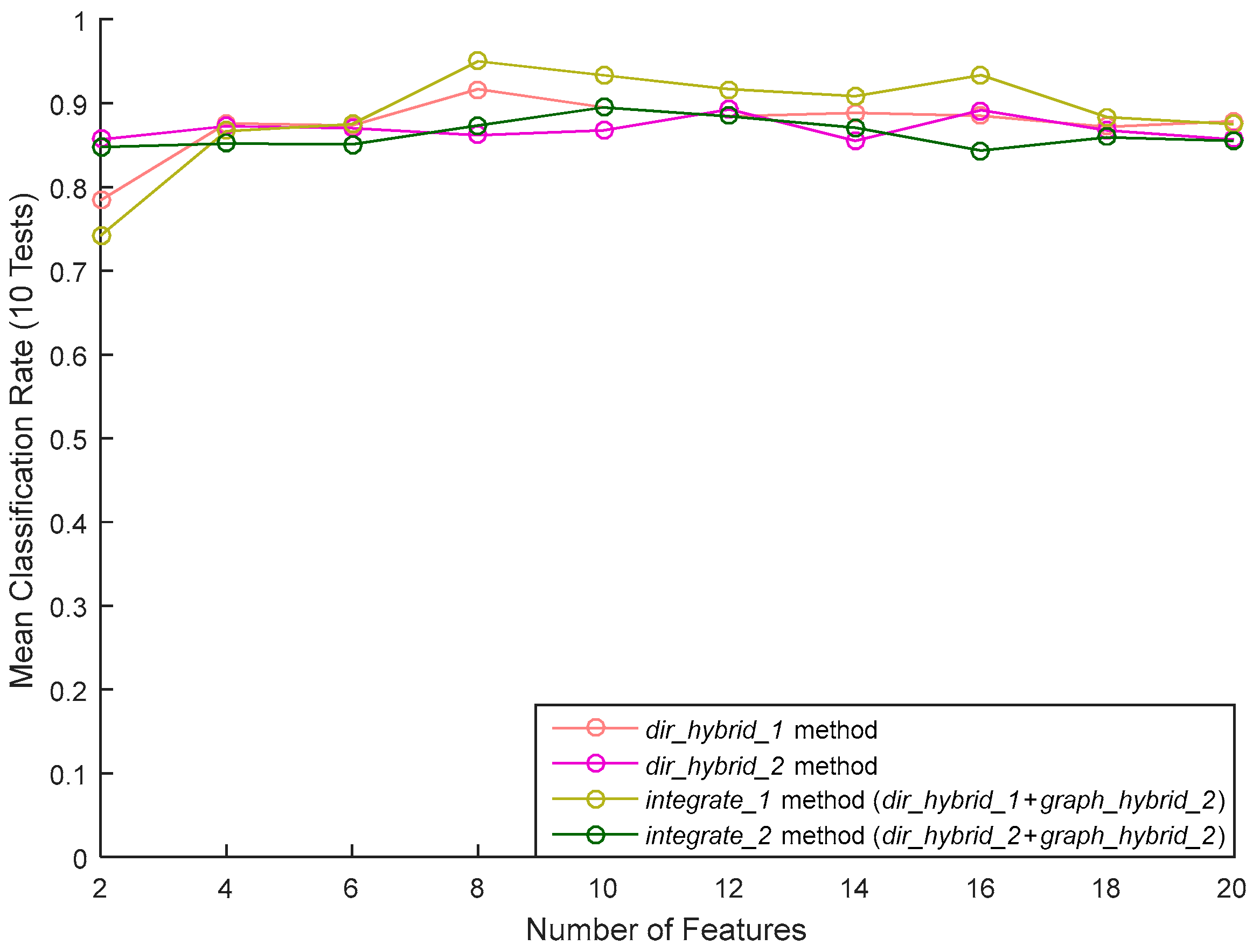
5.4. Combination of Direct and Graph Approach Features
6. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Id | Name | Anova (p-Value) | Ttest2 (p-Value) | Pearson (Score) | Fisher (Score) | Relief (Score) | Final (Score) |
|---|---|---|---|---|---|---|---|
| 1 | Xm | 8.43 × 10−32 | 1.06 × 10-1 | 2.64 × 10−2 | 2.63 | 1.84 × 10−1 | 0.443 |
| 2 | Xmax | 3.55 × 10−24 | 1.10 × 10−1 | −6.51 × 10−2 | 1.90 | 2.97 × 10−1 | 0.338 |
| 3 | Xstd | 3.88 × 10−54 | 3.53 × 10−2 | −5.27 × 10−2 | 7.01 | 2.79 × 10−1 | 0.324 |
| 4 | Xvar | 6.28 × 10−40 | 1.30 × 10−1 | −4.98 × 10−2 | 3.97 | 2.04 × 10−1 | 0.394 |
| 5 | Xrms | 8.03 × 10−29 | 9.36 × 10−2 | −5.45 × 10−2 | 2.06 | 1.61 × 10−1 | 0.399 |
| 6 | Xkurt | 5.05 × 10−1 | 2.28 × 10−1 | −4.26 × 10−2 | 6.28 × 10−1 | 6.22 × 10−3 | 0.625 |
| 7 | Ym | 1.16 × 10−57 | 2.47 × 10−2 | −6.02 × 10−2 | 11.20 | 2.38 × 10−1 | 0.331 |
| 8 | Ymax | 1.03 × 10−75 | 1.46 × 10−1 | 2.10 × 10−2 | 2.83 × 102 | 4.56 × 10−1 | 0.135 |
| 9 | Ystd | 2.21 × 10−93 | 2.64 × 10−3 | 5.44 × 10−2 | 40.5 | 3.34 × 10−1 | 0.330 |
| 10 | Yvar | 1.08 × 10−66 | 2.18 × 10−2 | 9.64 × 10−3 | 11.10 | 2.23 × 10−1 | 0.379 |
| 11 | Yrms | 1.09 × 10−69 | 1.82 × 10−2 | 7.27 × 10−32 | 10.90 | 2.32 × 10−1 | 0.413 |
| 12 | Ykurt | 4.06 × 10−1 | 2.89 × 10−1 | 2.11 × 10−1 | 3.79 × 10−1 | 4.13x10−3 | 0.784 |
| 13 | Vm | 1.45 × 10−48 | 1.22 × 10−1 | 5.01 × 10−4 | 5.52 | 2.41 × 10−1 | 0.405 |
| 14 | Vmax | 1.04 × 10−19 | 1.69 × 10−1 | 4.47 × 10−2 | 2.91 | 9.14 × 10−2 | 0.517 |
| 15 | Vstd | 4.16 × 10−34 | 1.79 × 10−1 | −8.17 × 10−3 | 3.08 | 1.52 × 10−1 | 0.460 |
| 16 | Vvar | 9.64 × 10−35 | 1.50 × 10−1 | 5.97 × 10−3 | 3.19 | 1.55 × 10−1 | 0.457 |
| 17 | Vrms | 4.33x10−11 | 1.87 × 10−1 | −7.68 × 10−3 | 8.34 × 10−1 | 4.84 × 10−2 | 0.511 |
| 18 | Vkurt | 4.50x10−5 | 2.10 × 10−1 | 4.93 × 10−2 | 3.72 × 10−1 | 4.52 × 10−2 | 0.556 |
| 19 | VXm | 9.86 × 10−1 | 5.00 × 10−1 | 3.55 × 10−2 | 3.59 × 10−2 | 4.98 × 10−3 | 0.867 |
| 20 | VXmax | 1.60 × 10−17 | 2.16 × 10−1 | 3.50 × 10−2 | 2.41 | 6.11 × 10−2 | 0.541 |
| 21 | VXstd | 2.74 × 10−31 | 2.22 × 10−1 | −2.70 × 10−2 | 2.89 | 1.07 × 10−1 | 0.484 |
| 22 | VXvar | 2.78 × 10−31 | 2.22 × 10−1 | −2.70 × 10−2 | 2.89 | 1.07 × 10−1 | 0.484 |
| 23 | VXrms | 2.51 × 10−9 | 2.46 × 10−1 | −1.08 × 10−2 | 8.32 × 10−1 | 2.26 × 10−2 | 0.541 |
| 24 | VXkurt | 1.72 × 10−9 | 2.28 × 10−1 | −1.52 × 10−2 | 6.61 × 10−1 | 6.78 × 10−2 | 0.512 |
| 25 | Vym | 9.76 × 10−1 | 5.70 × 10−1 | 6.22 × 10−3 | 2.76 × 10−2 | 7.69 × 10−3 | 0.871 |
| 26 | VYmax | 3.30 × 10−15 | 1.94 × 10−1 | 2.56 × 10−2 | 1.14 | 5.99 × 10−2 | 0.529 |
| 27 | VYstd | 2.48 × 10−31 | 1.59 × 10−1 | 1.28 × 10−2 | 2.50 | 1.45 × 10−1 | 0.470 |
| 28 | VYvar | 2.52 × 10−31 | 1.59 × 10−1 | 1.29 × 10−2 | 2.50 | 1.45 × 10−1 | 0.470 |
| 29 | VYrms | 2.13 × 10−9 | 1.58 × 10−1 | 1.52 × 10−2 | 7.00 × 10−1 | 4.49 × 10−2 | 0.517 |
| 30 | VYkurt | 1.12 × 10−7 | 1.81 × 10−1 | 4.79 × 10−2 | 5.48 × 10−1 | 6.13 × 10−2 | 0.538 |
| 31 | long_tot | 1.54 × 10−45 | 9.67 × 10−2 | 4.98 × 10−3 | 4.42 | 1.92 × 10−1 | 0.421 |
| 32 | m_long_seg | 6.90 × 10−50 | 1.03 × 10−1 | 6.50 × 10−3 | 5.51 | 2.33 × 10−1 | 0.405 |
| 33 | std_long_seg | 2.78 × 10−44 | 1.26 × 10−1 | 2.96 × 10−2 | 4.19 | 2.10 × 10−1 | 0.439 |
| 34 | dist_prdr | 2.39 × 10−2 | 1.55 × 10−1 | 4.08 × 10−2 | 2.62 × 10−1 | 7.15 × 10−3 | 0.553 |
| 35 | plage_X | 1.79 × 10−53 | 7.59 × 10−2 | −4.99 × 10−2 | 7.52 | 3.88 × 10−1 | 0.291 |
| 36 | plage_Y | 2.14 × 10−59 | 9.94 × 10−2 | 2.05 × 10−1 | 12.10 | 3.28 × 10−1 | 0.480 |
| 37 | surf_ellip | 5.65 × 10−49 | 4.67 × 10−2 | −3.49 × 10−2 | 5.40 | 2.36 × 10−1 | 0.359 |
| 38 | Lfs | 8.33 × 10−9 | 2.40 × 10−2 | 6.83 × 10−2 | 6.18 × 10−1 | 3.39 × 10−2 | 0.507 |
| 39 | mnfreqX | 4.08 × 10−29 | 1.47 × 10−1 | −2.06 × 10−2 | 2.06 | 1.40 × 10−1 | 0.448 |
| 40 | mnfreqY | 9.05 × 10−31 | 7.43 × 10−2 | 1.45 × 10−1 | 2.88 | 1.37 × 10−1 | 0.525 |
| 41 | mdfreqX | 7.60 × 10−29 | 7.92 × 10−2 | 9.55 × 10−3 | 2.19 | 1.27 × 10−1 | 0.448 |
| 42 | mdfreqY | 4.83 × 10−31 | 3.74 × 10−2 | 1.31 × 10−1 | 2.83 | 1.19 × 10−1 | 0.511 |
| 43 | AccXm | 2.19 × 10−40 | 7.51 × 10−2 | 1.62 × 10−1 | 6.33 | 2.05 × 10−1 | 0.503 |
| 44 | AccXmax | 1.94 × 10−34 | 7.24 × 10−2 | 8.73 × 10−2 | 4.36 | 1.94 × 10−1 | 0.462 |
| 45 | AccXstd | 2.21 × 10−95 | 6.56 × 10−2 | −1.89 × 10−2 | 66.30 | 3.24 × 10−1 | 0.293 |
| 46 | AccXvar | 2.77 × 10−60 | 9.76 × 10−2 | 6.33 × 10−2 | 2.16 × 101 | 2.33 × 10−1 | 0.427 |
| 47 | AccXrms | 1.12 × 10−87 | 5.78 × 10−2 | −4.74 × 10−2 | 2.01 × 101 | 2.55 × 10−1 | 0.336 |
| 48 | AccXkurt | 7.37 × 10−2 | 3.33 × 10−1 | 1.73 × 10−2 | 1.55 × 10−1 | 8.31 × 10−3 | 0.611 |
| 49 | AccYm | 1.74 × 10−42 | 8.42 × 10−4 | −2.31 × 10−2 | 6.46 | 2.02 × 10−1 | 0.364 |
| 50 | AccYmax | 5.61 × 10−31 | 9.43 × 10−3 | −9.55 × 10−2 | 4.48 | 1.47 × 10−1 | 0.349 |
| 51 | AccYstd | 3.04 × 10−72 | 3.26 × 10−4 | −3.65 × 10−2 | 17.80 | 3.34 × 10−1 | 0.289 |
| 52 | AccYvar | 4.14 × 10−48 | 3.44 × 10−2 | −7.64 × 10−5 | 9.98 | 2.23 × 10−1 | 0.379 |
| 53 | AccYrms | 6.35 × 10−54 | 1.46 × 10−3 | −3.38 × 10−2 | 6.62 | 2.66 × 10−1 | 0.330 |
| 54 | AccYkurt | 5.93 × 10−1 | 3.47 × 10−1 | −1.15 × 10−1 | 1.86 × 10−1 | 6.84 × 10−3 | 0.641 |
| 55 | AccZm | 1.15 × 10−66 | 3.23 × 10−2 | 5.87 × 10−3 | 1.55 × 101 | 3.14 × 10−1 | 0.337 |
| 56 | AccZmax | 7.20 × 10−32 | 1.06 × 10−1 | 8.16 × 10−2 | 8.62 | 1.86 × 10−1 | 0.471 |
| 57 | AccZstd | 1.45 × 10−72 | 2.44 × 10−3 | −8.06 × 10−2 | 19.90 | 3.18 × 10−1 | 0.268 |
| 58 | AccZvar | 1.29 × 10−70 | 1.06 × 10−3 | 5.93 × 10−2 | 18.00 | 2.61 × 10−1 | 0.381 |
| 59 | AccZrms | 7.42 × 10−53 | 2.66 × 10−3 | −6.87 × 10−2 | 6.41 | 2.19 × 10−1 | 0.330 |
| 60 | AccZkurt | 7.72 × 10−8 | 3.32 × 10−1 | 1.18 × 10−1 | 6.57 × 10−1 | 6.09 × 10−2 | 0.634 |
| Method | Features Kept (from the Most Relevant to the Least)) | |
|---|---|---|
| Name | Test | |
| dir_filter_1 | Ttest 2 (p-value ≥ 0.05) | 51-49-58-53-57-9-59-50-11-10-38-7-55-52-3-42-37 |
| dir_filter_2 | Pearson | 52-13-31-55-16-25-32-17-15-41-10-23-27-28-29-24-48-45-39-8-49-26-1-21-22-33-53-37-20-19-51-34-6-14-47-30-18-4-35-3-9-5-58-7-46-2-38-59-11-57-56-44-50-54-60-42-40-43-36-12 |
| dir_filter_3 | Fisher | 8-45-9-46-47-57-58-51-55-36-7-10-11-52-56-35-3-53-49-59-43-13-32-37-50-31-44-33-4-16-15-14-21-22-40-42-1-27-28-20-41-5-39-2-26-17-23-29-24-60-6-38-30-12-18-34-54-48-19-25 |
| dir_filter_4 | Anova (p-value ≥ 0.05) | 45-9-47-8-57-51-58-11-10-55-46-36-7-3-53-35-59-32-37-13-52-31-33-49-43-4-16-44-15-56-1-27-28-21-22-42-50-40-39-41-5-2-14-20-26-17-24-29-23-38-60-30-18-34-48 |
| dir_filter_5 | Relief | 8-35-51-9-36-45-57-55-2-3-53-58-47-13-7-37-32-46-11-10-52-59-33-43-4-49-44-31-56-1-5-16-15-50-27-28-39-40-41-42-21-22-14-24-30-20-60-26-17-18-29-38-23-48-25-34-54-6-19-12 |
| dir_filter_6 | Combination (combination of all tests) | 8-57-51-35-45-3-59-53-9-7-47-55-2-50-37-49-52-10-58-4-5-13-32-11-31-46-33-1-39-41-16-15-44-27-28-56-36-21-22-43-38-42-17-24-14-29-40-26-30-20-23-34-18-48-6-60-54-12-19-25 |
| Name | Description | Features Kept (from the Most Relevant to the Least) |
|---|---|---|
| dir_hybride_1 | dir_filter_1 (Ttest2) + wrapper (SFS) | 55-10-51-47-3-49-44-52-9-45-59-42-53-37-7-57-58-50-38-11 |
| dir_hybride_2 | dir_filter_6 (Combination) + wrapper (SFS) | 10-49-58-7-9-37-51-45-52-3-31-53-59-55-13-32-57-35-47-8 |
References
- Da Costa, B.R.; Vieira, E.R. Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. Am. J. Ind. Med. 2010, 53, 285–323. [Google Scholar] [CrossRef] [PubMed]
- Roy, J.S.; Moffet, H.; McFadyen, B.J. Upper limb motor strategies in persons with and without shoulder impingement syndrome across different speeds of movement. Clin. Biomech. 2008, 23, 1227–1236. [Google Scholar] [CrossRef] [PubMed]
- MacDermid, J.C.; Ramos, J.; Drosdowech, D.; Faber, K.; Patterson, S. The impact of rotator cuff pathology on isometric and isokinetic strength, function, and quality of life. J. Shoulder Elb. Surg. 2004, 13, 593–598. [Google Scholar] [CrossRef]
- Badley, E.M.; Rasooly, I.; Webster, G.K. Relative importance of musculoskeletal disorders as a cause of chronic health problems, disability, and health care utilization: Findings from the 1990 ontario health survey. J. Rheumatol. 1994, 21, 505–514. [Google Scholar] [PubMed]
- Brooks, P.M. The burden of musculoskeletal disease—A global perspective. Clin. Rheumatol. 2006, 25, 778–781. [Google Scholar] [CrossRef] [PubMed]
- Lawrence, R.C.; Helmick, C.G.; Arnett, F.C.; Deyo, R.A.; Felson, D.T.; Giannini, E.H.; Heyse, S.P.; Hirsch, R.; Hochberg, M.C.; Hunder, G.G. Estimates of the prevalence of arthritis and selected musculoskeletal disorders in the United States. Arthritis Rheum. 1998, 41, 778–799. [Google Scholar] [CrossRef]
- Bone, U.S.; Decade, J. The Burden of Musculoskeletal Diseases in the United States; American Academy of Orthopaedic Surgeons: Rosemont, IL, USA, 2008. [Google Scholar]
- Wang, J.; Cui, Y.; He, L.; Xu, X.; Yuan, Z.; Jin, X.; Li, Z. Work-related musculoskeletal disorders and risk factors among Chinese medical staff of obstetrics and gynecology. Int. J. Environ. Res. Public Health 2017, 14, 562. [Google Scholar] [CrossRef] [PubMed]
- Cammarota, A. The commission’s initiative on msds: Recent developments in social partner consultation at the European level. Presented at the Conference on MSDs—A Challenge for the Telecommunications Industry, Lisbon, Portugal, 20–21 October 2003; pp. 20–21. [Google Scholar]
- Gunz, A.C.; Canizares, M.; MacKay, C.; Badley, E.M. Magnitude of impact and healthcare use for musculoskeletal disorders in the paediaric: A population-based study. BMC Musculoskelet. Disord. 2012, 13. [Google Scholar] [CrossRef] [PubMed]
- Provencher, J.; Blouin, S.; Barbeau, A.; Gélinas, P. Statistics on Injuries Attributable to MSDs in the Workplace 2012–2015; Committee on Standards, Equity of Occupational Health and Safety of Quebec (CSEOHS): Quebec, QC, Canada, 2016. [Google Scholar]
- Thiehoff, R. Economic significance of work disability caused by musculoskeletal disorders. Der Orthop. 2002, 31, 949–956. [Google Scholar] [CrossRef] [PubMed]
- Spielholz, P.; Silverstein, B.; Morgan, M.; Checkoway, H.; Kaufman, J. Comparison of self-report, video observation and direct measurement methods for upper extremity musculoskeletal disorder physical risk factors. Ergonomics 2001, 44, 588–613. [Google Scholar] [CrossRef] [PubMed]
- Burdorf, A.; Van der Beek, A. Exposure assessment strategies for work-related risk factors for musculoskeletal disorders. Scand. J. Work Environ. Health 1999, 25, 25–30. [Google Scholar] [PubMed]
- David, G. Ergonomic methods for assessing exposure to risk factors for work-related musculoskeletal disorders. Occup. Med. 2005, 55, 190–199. [Google Scholar] [CrossRef] [PubMed]
- Sarkar, K.; Dev, S.; Das, T.; Chakrabarty, S.; Gangopadhyay, S. Examination of postures and frequency of musculoskeletal disorders among manual workers in Calcutta, India. Int. J. Occup. Environ. Health 2016, 22, 151–158. [Google Scholar] [CrossRef] [PubMed]
- Yen, T.Y.; Radwin, R.G. A video-based system for acquiring biomechanical data synchronized with arbitrary events and activities. IEEE Trans. Biomed. Eng. 1995, 42, 944–948. [Google Scholar] [CrossRef] [PubMed]
- Juul-Kristensen, B.; Hansson, G.-Å.; Fallentin, N.; Andersen, J.; Ekdahl, C. Assessment of work postures and movements using a video-based observation method and direct technical measurements. Appl. Ergon. 2001, 32, 517–524. [Google Scholar] [CrossRef]
- Boukhenous, S.; Attari, M.; Remram, Y. Force platform for postural balance analysis. In Proceedings of the 11th International Conference on Information Science, Signal Processing and their Applications (ISSPA), Montreal, QC, Canada, 2–5 July 2012. [Google Scholar]
- Gil, A.W.O.; Oliveira, M.R.; Coelho, V.A.; Carvalho, C.E.; Teixeira, D.C.; Silva, R.A.D., Jr. Relationship between force platform and two functional tests for measuring balance in the elderly. Braz. J. Phys. Ther. 2011, 15, 429–435. [Google Scholar] [CrossRef]
- Wikstrom, E.A.; Tillman, M.D.; Smith, A.N.; Borsa, P.A. A new force-plate technology measure of dynamic postural stability: The dynamic postural stability index. J. Athl. Train. 2005, 40, 305–309. [Google Scholar] [PubMed]
- Heebner, N.R.; Akins, J.S.; Lephart, S.M.; Sell, T.C. Reliability and validity of an accelerometry based measure of static and dynamic postural stability in healthy and active individuals. Gait Posture 2015, 41, 535–539. [Google Scholar] [CrossRef] [PubMed]
- Alwasel, A.; Elrayes, K.; Abdel-Rahman, E.M.; Haas, C. Sensing construction work-related musculoskeletal disorders (WMSDs). In Proceedings of the 28th International Symposium on Automation and Robotics in Construction (ISARC 2011), Seoul, Korea, 29 June–2 July 2011. [Google Scholar]
- Diego-Mas, J.A.; Alcaide-Marzal, J. Using Kinect™ sensor in observational methods for assessing postures at work. Appl. Ergon. 2014, 45, 976–985. [Google Scholar] [CrossRef] [PubMed]
- Bernmark, E.; Wiktorin, C. A triaxial accelerometer for measuring arm movements. Appl. Ergon. 2002, 33, 541–547. [Google Scholar] [CrossRef]
- Li, G.; Buckle, P. Current techniques for assessing physical exposure to work-related musculoskeletal risks, with emphasis on posture-based methods. Ergonomics 1999, 42, 674–695. [Google Scholar] [CrossRef] [PubMed]
- Ray, S.J.; Teizer, J. Real-time construction worker posture analysis for ergonomics training. Adv. Eng. Inform. 2012, 26, 439–455. [Google Scholar] [CrossRef]
- Turner, J.A.; Franklin, G.; Fulton-Kehoe, D.; Egan, K.; Wickizer, T.M.; Lymp, J.F.; Sheppard, L.; Kaufman, J.D. Prediction of chronic disability in work-related musculoskeletal disorders: A prospective, population-based study. BMC Musculoskelet. Disord. 2004, 5, 14. [Google Scholar] [CrossRef] [PubMed]
- Bertke, S.; Meyers, A.; Wurzelbacher, S.; Bell, J.; Lampl, M.; Robins, D. Development and evaluation of a naïve bayesian model for coding causation of workers’ compensation claims. J. Saf. Res. 2012, 43, 327–332. [Google Scholar] [CrossRef] [PubMed]
- Yi, W.; Chan, A.P.; Wang, X.; Wang, J. Development of an early-warning system for site work in hot and humid environments: A case study. Autom. Constr. 2016, 62, 101–113. [Google Scholar] [CrossRef]
- Sánchez, A.S.; Iglesias-Rodríguez, F.J.; Fernández, P.R.; de Cos Juez, F. Applying the K-nearest neighbor technique to the classification of workers according to their risk of suffering musculoskeletal disorders. Int. J. Ind. Ergon. 2016, 52, 92–99. [Google Scholar] [CrossRef]
- Zurada, J.; Karwowski, W.; Marras, W. Classification of jobs with risk of low back disorders by applying data mining techniques. Occup. Ergon. 2004, 4, 291–305. [Google Scholar]
- Tiryaki, S.; Aydın, A. An artificial neural network model for predicting compression strength of heat treated woods and comparison with a multiple linear regression model. Constr. Build. Mater. 2014, 62, 102–108. [Google Scholar] [CrossRef]
- Lugade, V.; Lin, V.; Farley, A.; Chou, L.-S. An artificial neural network estimation of gait balance control in the elderly using clinical evaluations. PLoS ONE 2014, 9, e97595. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.-L.; Kaber, D.B.; Dempsey, P.G. A new approach to applying feedforward neural networks to the prediction of musculoskeletal disorder risk. Appl. Ergon. 2000, 31, 269–282. [Google Scholar] [CrossRef]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.; Feng, D.D.; Tao, X. In-shoe plantar pressure measurement and analysis system based on fabric pressure sensing array. IEEE Trans. Inform. Technol. Biomed. 2010, 14, 767–775. [Google Scholar]
- Debbi, E.M.; Wolfa, A.; Goryachev, Y.; Yizhar, Z.; Luger, E.; Debi, R.; Haim, A. In-shoe center of pressure: Indirect force plate vs. direct insole measurement. Foot 2012, 22, 269–275. [Google Scholar] [CrossRef] [PubMed]
- Nussbaum, S.K.M.A. Evaluation of two approaches for aligning data obtained from a motion capture system and an in-shoe pressure measurement system. Sensors 2014, 14, 16994–17007. [Google Scholar]
- Hsue, B.-J.M.; Su, F.-C. The dynamic balance of the children with cerebral palsy and typical developing during gait. Part I: Spatial relationship between com and cop trajectories. Gait Posture 2009, 29, 465–470. [Google Scholar] [CrossRef] [PubMed]
- Ruhe, A.F.R.; Walker, B. The test–retest reliability of centre of pressure measures in bipedal static task conditions—A systematic review of the literature. Gait Posture 2010, 32, 436–445. [Google Scholar] [CrossRef] [PubMed]
- Ayena, J.C.; Chapwouo, L.D.; Otis, M.J.D.; Menelas, B.A.J. An efficient home-based risk of falling assessment test based on smartphone and instrumented insole. In Proceedings of the IEEE International Symposium on Medical Measurements and Applications (MeMeA), Torino, Italy, 7–9 May 2015. [Google Scholar]
- Palmieri, R.M.; Ingersoll, C.D.; Stone, M.B.; Krause, B.A. Center-of-pressure parameters used in the assessment of postural control. J. Sport Rehabil. 2002, 11, 51–66. [Google Scholar] [CrossRef]
- Lin, W.-H.; Liu, Y.-F.; Hsieh, C.C.-C.; Lee, A.J.Y. Ankle eversion to inversion strength ratio and static balance control in the dominant and non-dominant limbs of young adults. J. Sci. Med. Sport 2009, 12, 42–49. [Google Scholar] [CrossRef] [PubMed]
- Otis, M.J.-D.; Ayena, J.C.; Tremblay, L.E.; Fortin, P.E.; Ménélas, B.-A.J. Use of an enactive insole for reducing the risk of falling on different types of soil using vibrotactile cueing for the elderly. PLoS ONE 2016, 11, e0162107. [Google Scholar] [CrossRef] [PubMed]
- Barkallah, E.; Otis, M.J.; Ngomo, S.; Heraud, M. Measuring operator’s pain: Toward evaluating musculoskeletal disorder at work. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Hong Kong, China, 9–12 October 2015. [Google Scholar]
- Li, P.; Meziane, R.; Otis, M.J.-D.; Ezzaidi, H.; Cardou, P. A Smart Safety Helmet using IMU and EEG sensors for worker fatigue detection. In Proceedings of the IEEE International Symposium on RObotic and SEnsors Environments (ROSE), Timisoara, Romania, 16–19 October 2014. [Google Scholar]
- SingleTact. Singletact Miniature Force Sensors; S8-100N; Pressure Profile Systems, Inc.: Los Angeles, CA, USA, November 2016. [Google Scholar]
- Lincoln, L.S.; Bamberg, S.J.M.; Parsons, E.; Salisbury, C.; Wheeler, J. An elastomeric insole for 3-axis ground reaction force measurement. In Proceedings of the 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Roma, Italy, 24–27 June 2012. [Google Scholar]
- Hagem, R.M.; Thiel, D.V.; Keefe, S.G.O.; Dahm, N.; Stamm, A.; Fickenscher, T. Smart optical wireless sensor for real time swimmers feedback. IEEE Sens. 2012, 1–4. [Google Scholar]
- Mendes, J.J.A.; Vieira, M.E.M.; Pires, M.B.; Stevan, S.L. Sensor fusion and smart sensor in sports and biomedical applications. Sensors 2016, 16, 1569. [Google Scholar] [CrossRef] [PubMed]
- Muro-de-la-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed]
- Meziane, R.; Li, P.; Otis, M.J.D.; Ezzaidi, H.; Cardou, P. Safer hybrid workspace using human-robot interaction while sharing production activities. In Proceedings of the IEEE International Symposium on Robotic and Sensors Environments (ROSE), Timisoara, Romania, 16–18 October 2014. [Google Scholar]
- Simoneau, S. Handling and Back Pain; Manufacturing of Metal Products and Electrical Products; Joint Sectoral Association for Occupational Health and Safety: Longueil, QC, Canada, 2010. [Google Scholar]
- Minister of Justice. Canada Occupational Health and Safety Regulations; Minister of Justice: Ottawa, ON, Canada, 2017; p. 216. [Google Scholar]
- Baratto, L.; Morasso, P.G.; Re, C.; Spada, G. A new look at posturographic analysis in the clinical context: Sway-density vs. other parameterization techniques. Motor Control 2002, 6, 246–270. [Google Scholar] [CrossRef] [PubMed]
- Paillard, T.; Noe, F. Techniques and methods for testing the postural function in healthy and pathological subjects. Biomed. Res. Int. 2015, 2015. [Google Scholar] [CrossRef] [PubMed]
- Van Dieen, J.H.; Koppes, L.L.; Twisk, J.W. Postural sway parameters in seated balancing; their reliability and relationship with balancing performance. Gait Posture 2010, 31, 42–46. [Google Scholar] [CrossRef] [PubMed]
- Collins, J.J.; De Luca, C.J. Open-loop and closed-loop control of posture: A random-walk analysis of center-of-pressure trajectories. Exp. Brain Res. 1993, 95, 308–318. [Google Scholar] [CrossRef] [PubMed]
- Baszczyk, J.W.; Klonowski, W. Postural stability and fractal dynamics. Acta Neurobiol. 2001, 61, 105–112. [Google Scholar]
- Bandyopadhyay, S.; Pal, S.K. Classification and Learning Using Genetic Algorithms; Springer: Heidelberg/Berlin, Germany, 2007. [Google Scholar]
- Cateni, S.; Colla, V.; Vannucci, M. A hybrid feature selection method for classification purposes. In Proceedings of the EMS 2014 European Modelling Symposium, Washington, DC, USA, 21–23 October 2014. [Google Scholar]
- Tang, J.A.; Alelyani, S.; Liu, H. Feature Selection for Classification: A Review; CRC Press: Boca Raton, FL, USA, 2014; pp. 37–64. [Google Scholar]
- Chouaib, H. Sélection De Caractéristiques: Méthodes Et Applications; Paris Descartes University: Paris, France, 2011. [Google Scholar]
- Naqvi, G. A Hybrid Filter-Wrapper Approach for Feature Selection; Örebro University: Örebro, Sweden, 2012. [Google Scholar]
- Guo, S.; Zhong, S.; Zhang, A. Privacy preserving calculation of fisher criterion score for informative gene selection. In Proceedings of the 19th Annual International Conference on Research in Computational Molecular Biology (RECOMB), Warsaw, Poland, 12–15 April 2015. [Google Scholar]
- Nelson-Wong, E.; Howarth, S.; Winter, D.A.; Callaghan, J.P. Application of autocorrelation and cross-correlation analyses in human movement and rehabilitation research. J. Orthop. Sports Phys. Ther. 2009, 39, 287–295. [Google Scholar] [CrossRef] [PubMed]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H.; De Jesús, O. Neural Network Design, 2nd ed.; PWS Publishing Co.: Boston, MA, USA, 1996. [Google Scholar]
- Du Jardin, P. Prévision De La Défaillance Et Réseaux De Neurones: L’apport Des Méthodes Numériques De Sélection; Université de Nice, Sophia-Antipolis: Nice, France, 2007. [Google Scholar]
- MatLab and Statistics Toolbox. Matlab Documentation Release R2016b; The Mathworks, Inc.: Natick, MA, USA, 2016.
- Bestaven, E.; Petit, J.; Robert, B.; Dehail, P. Center of pressure path during sit-to-walk tasks in young and elderly humans. Ann. Phys. Rehabil. Med. 2013, 56, 644–651. [Google Scholar] [CrossRef] [PubMed]




















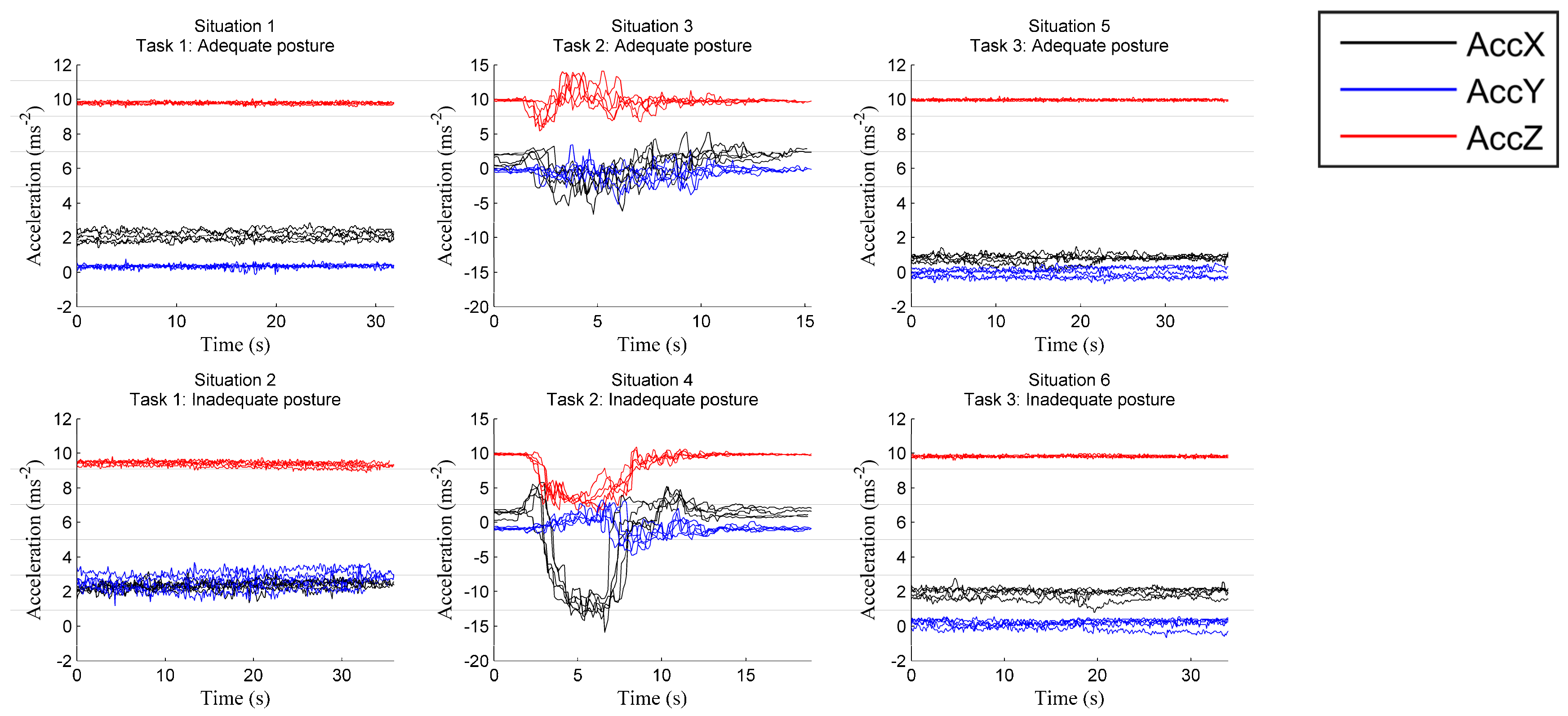
| Mean Value (ms−2) | Situation 1 | Situation 2 | Situation 5 | Situation 6 |
|---|---|---|---|---|
| AccX | ≈2 | ≈2 | ≈1 | ≈2 |
| AccY | ≈0 | ≈2 | ≈0 | ≈0 |
| Type | Description | Name |
|---|---|---|
| Spatiotemporal features extracted from the statokinesigram | The total length of the statokinesigram | lg_tot |
| The mean and standard deviation of the statokinesigram’s segments lengths | m_lg_seg std_lg_seg | |
| The distance between the first and last point of the statokinesigram | dist_prdr | |
| The amplitude of the displacement in the mediolateral (XCOP) and anteroposterior (YCOP) axes | Am_X Am_Y | |
| The surface of the ellipse covering 90% of the displacements of the COP | surf_ellip | |
| The length/surface ratio, which informs us on the energy spent by the subject during the postural control | lfs | |
| Spatiotemporal features extracted from the stabilograms | The mean and maximum values, the variances, the standard deviations, the root-mean-squares and the kurtosis of the displacements in the mediolateral (XCOP) and anteroposterior (YCOP) axes. | Xm, Ym, Xmax, Ymax Xstd, Ystd, Xvar, Yvar Xrms, Yrms, Xkurt, Ykurt |
| Statistical data related to the velocity (global, mediolateral and anteroposterior) such as mean and maximum values, the variances, the standard deviations, the root-mean-squares and the kurtosis | Vm, VXm, Vym Vmax, VXmax, Vymax Vstd, VXstd, Vystd Vvar, Vxvar, Vyvar Vrms, VXrms, Vyrms Vkurt, VXkurt, VYkurt | |
| Frequential features | Mean and median frequencies of the mediolateral (XCOP) and anteroposterior (YCOP) displacements | mnfreqX, mnfreqY mdfreqX, mdfreqY |
| Resolution (Number of Matrix Elements) | Area Represented by a Single Matrix (mm2) |
|---|---|
| 420 | 3.50 × 3.82 |
| 574 | 3.07 × 3.26 |
| 768 | 2.68 × 2.79 |
| 990 | 2.38 × 2.43 |
| 1220 | 2.15 × 2.19 |
| 1564 | 1.86 × 1.97 |
| 2187 | 1.59 × 1.65 |
| Name | Description | Equation |
|---|---|---|
| Fisher criterion | It represents one of the most common «filter» models used to select features [61,65]. This criterion emphasizes the importance of each feature by calculating the ratio of separation between two classes with respect to their dispersions. With this criterion, the features with the highest results allow a better discrimination between the classes | and represent respectively the mean and the standard deviation of the feature of the class |
| Two-sample t-test | This «filter» approach is also widely used to estimate the importance of each feature in discriminating between the different classes [61]. The two-sample t-test, is a univariate statistical test that analyses whether we could consider two independent samples as coming from classes with unequal means by analyzing the values of the given feature | and represent respectively the number of samples of the classes 1 et 2. They are equal in our case |
| Pearson Correlation Coefficient | The correlation coefficient is also used to determine the discrimination power of each features between the different classes [64,66]. The result of the equation gives us an idea about the degree of similarity between two classes. It varies between −1 and 1. The closer it is to 0, the more insignificant the relationship between classes is, and the closer it gets to 1 or −1, the more significant it is | and represent the samples of the classes 1 and 2 respectively |
| ANOVA | The analysis of variance aims to test the significant differences between the means, it represents an extension of the Ttest2 for multi-class problems. We used this technique to test whether or not a feature allows a good discrimination between the different classes of the problem | - |
| Relief | The Relief technique makes it possible to measure the relevance of the features by accumulating the difference of the distances between randomly selected learning variables and their closest neighbors of the same class, and subtracting the distances with the variables of the other classes [62,63]. We used the generalized version of this method, named ReliefF, used for multi-class problems | - |
| Id | Name | Description | Tool |
|---|---|---|---|
| 55 | AccZm | Mean acceleration of the head along the axis Z | Helmet |
| 10 | Yvar | YCOP variance | Insole |
| 51 | AccYstd | Standard deviation of the acceleration along the axis Y | Helmet |
| 47 | AccXrms | The root mean square of the acceleration along the axis X | Helmet |
| 3 | Xstd | Standard deviation of XCOP | Insole |
| 49 | AccYm | Mean acceleration of the head along the axis Y | Helmet |
| 44 | AccXmax | Maximal head acceleration along the axis X | Helmet |
| 52 | AccYvar | Variance of the head acceleration along the axis Y | Helmet |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barkallah, E.; Freulard, J.; Otis, M.J.-D.; Ngomo, S.; Ayena, J.C.; Desrosiers, C. Wearable Devices for Classification of Inadequate Posture at Work Using Neural Networks. Sensors 2017, 17, 2003. https://doi.org/10.3390/s17092003
Barkallah E, Freulard J, Otis MJ-D, Ngomo S, Ayena JC, Desrosiers C. Wearable Devices for Classification of Inadequate Posture at Work Using Neural Networks. Sensors. 2017; 17(9):2003. https://doi.org/10.3390/s17092003
Chicago/Turabian StyleBarkallah, Eya, Johan Freulard, Martin J. -D. Otis, Suzy Ngomo, Johannes C. Ayena, and Christian Desrosiers. 2017. "Wearable Devices for Classification of Inadequate Posture at Work Using Neural Networks" Sensors 17, no. 9: 2003. https://doi.org/10.3390/s17092003
APA StyleBarkallah, E., Freulard, J., Otis, M. J.-D., Ngomo, S., Ayena, J. C., & Desrosiers, C. (2017). Wearable Devices for Classification of Inadequate Posture at Work Using Neural Networks. Sensors, 17(9), 2003. https://doi.org/10.3390/s17092003