
Ranging Consistency Based on Ranging-Compensated Temperature-Sensing Sensor for Inter-Satellite Link of Navigation Constellation

Abstract
:1. Introduction
2. Analysis of Ranging Consistency for ISL Payload
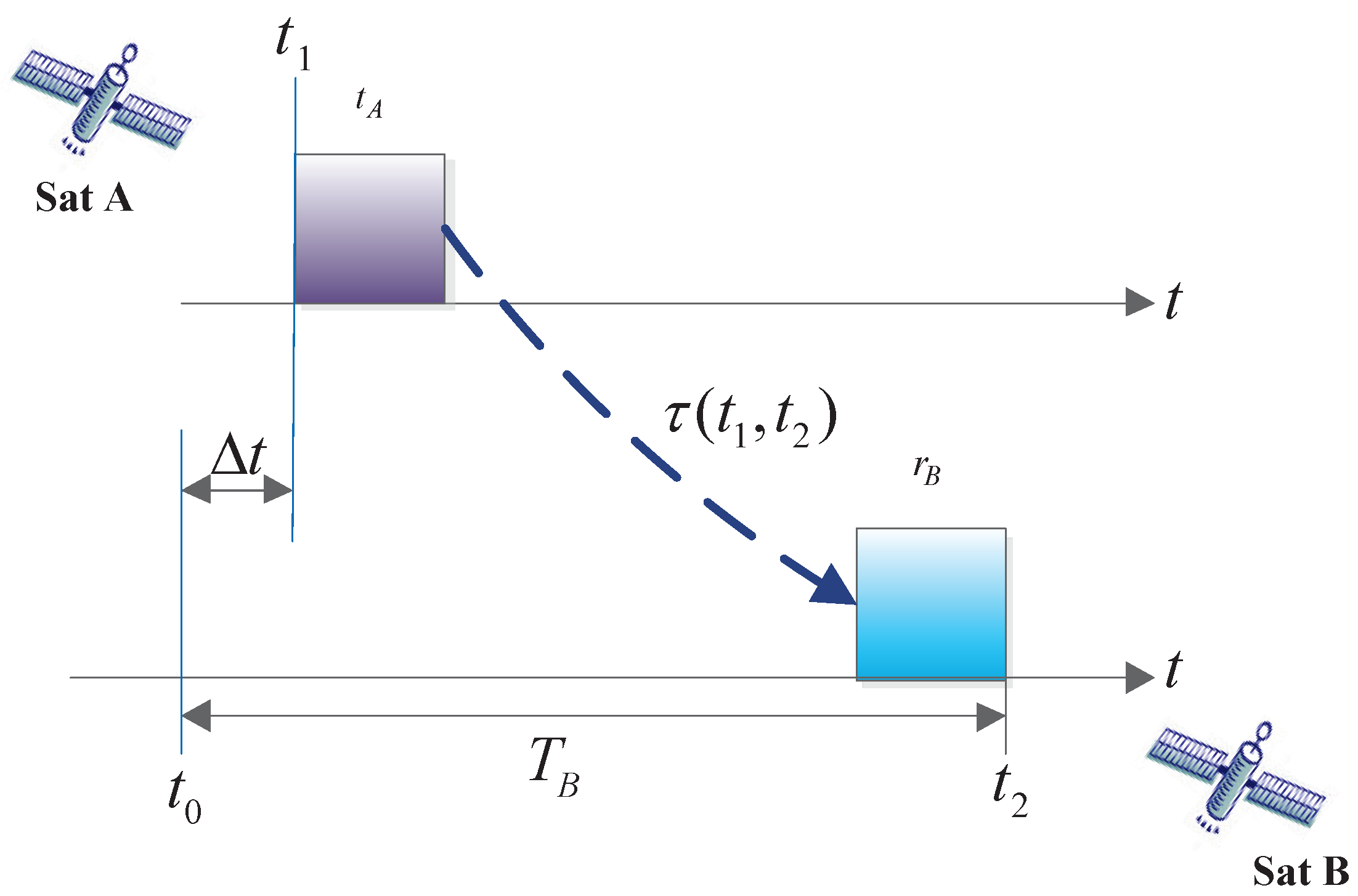
2.1. Ranging Principle of ISL Payload
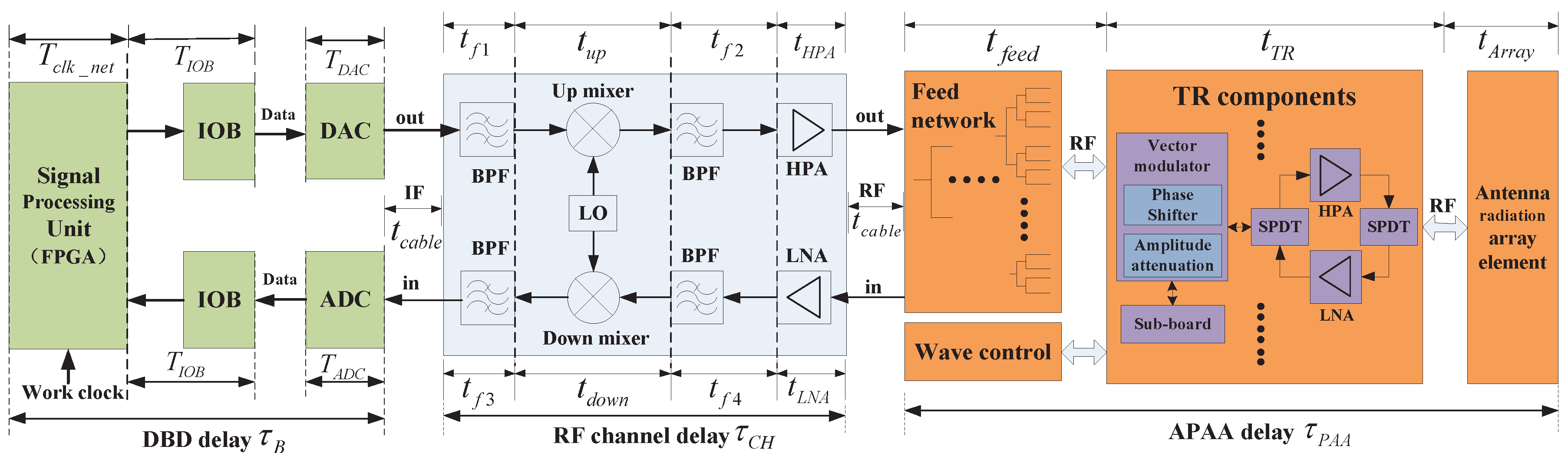
2.2. Overview of ISL Payload Composition and Delay Distribution
2.3. Temperature Characteristic of the ISL Payload
3. Proposed Ranging-Compensated Temperature-Sensing Sensor Design Method
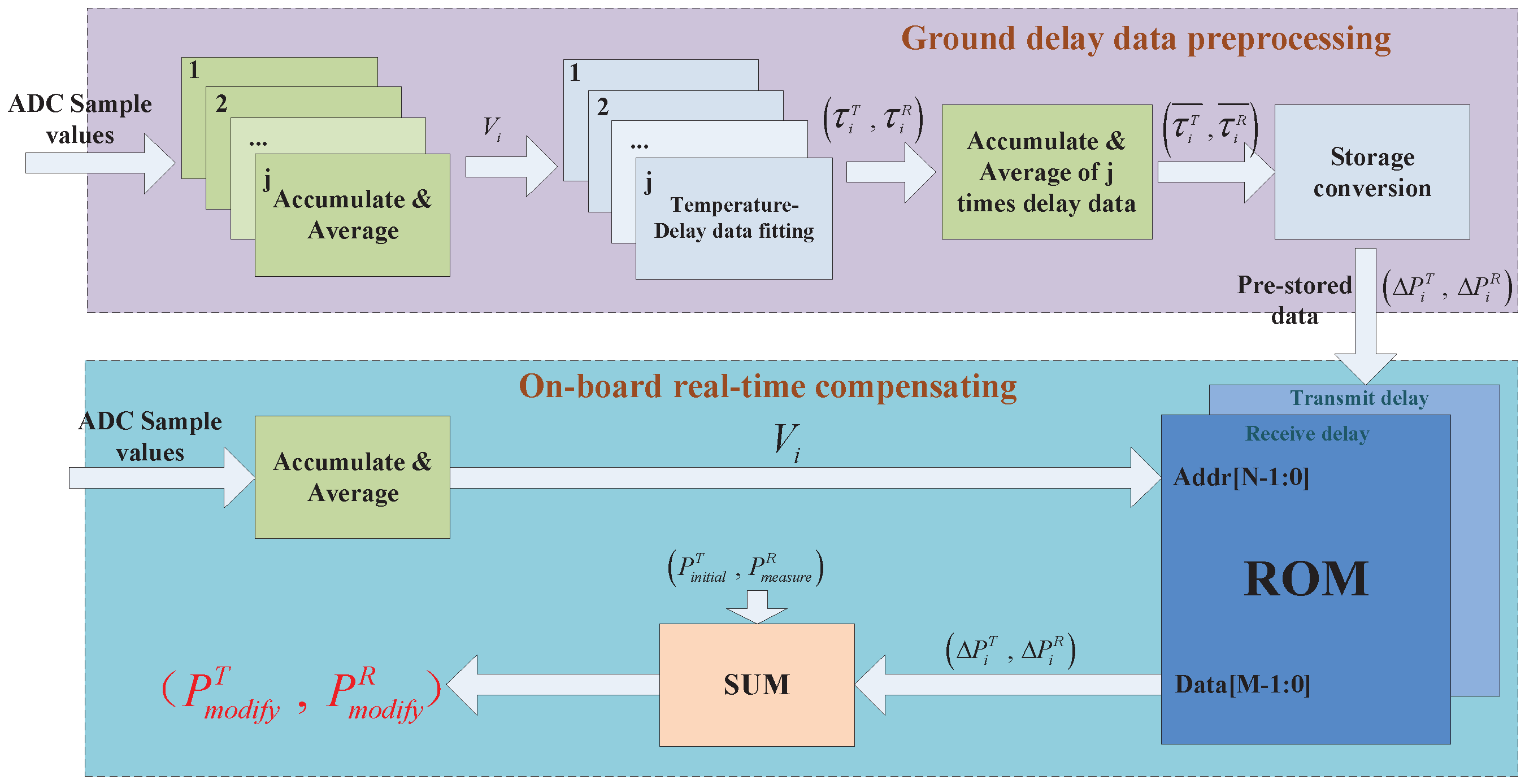
3.1. Architectural Overview
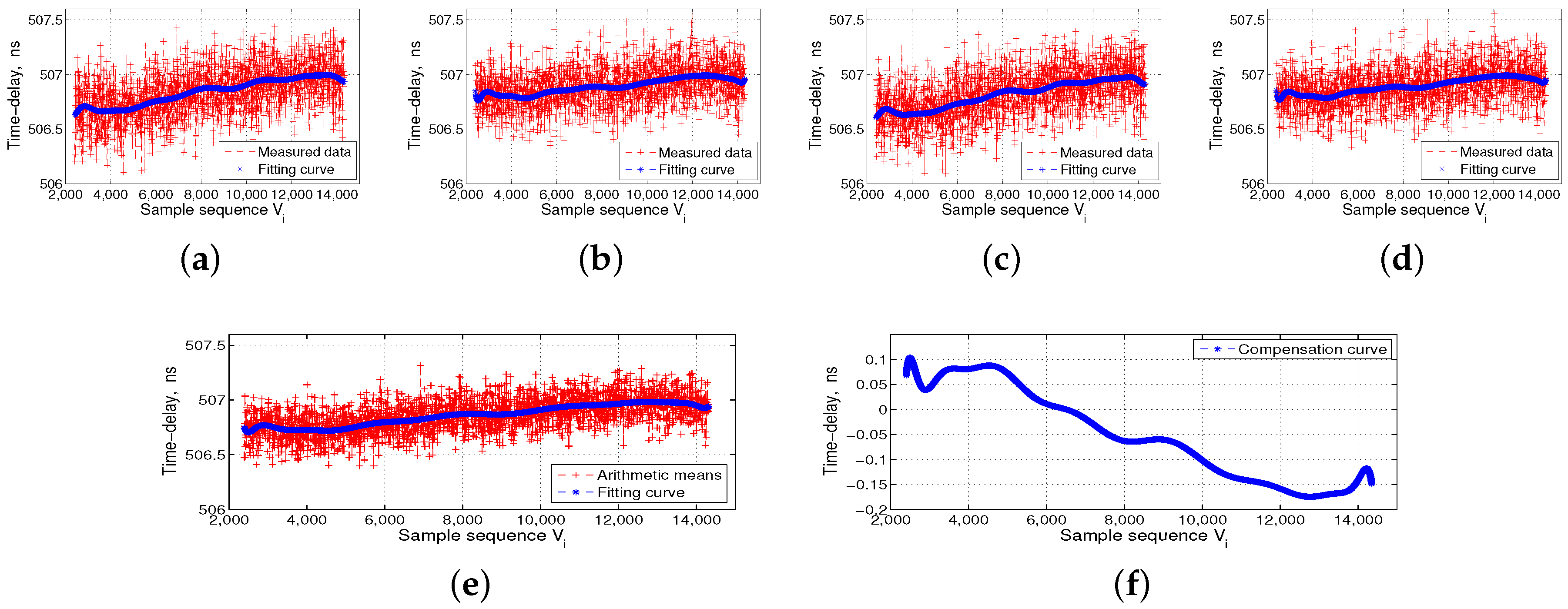
3.2. Data Preprocessing Flow and Method
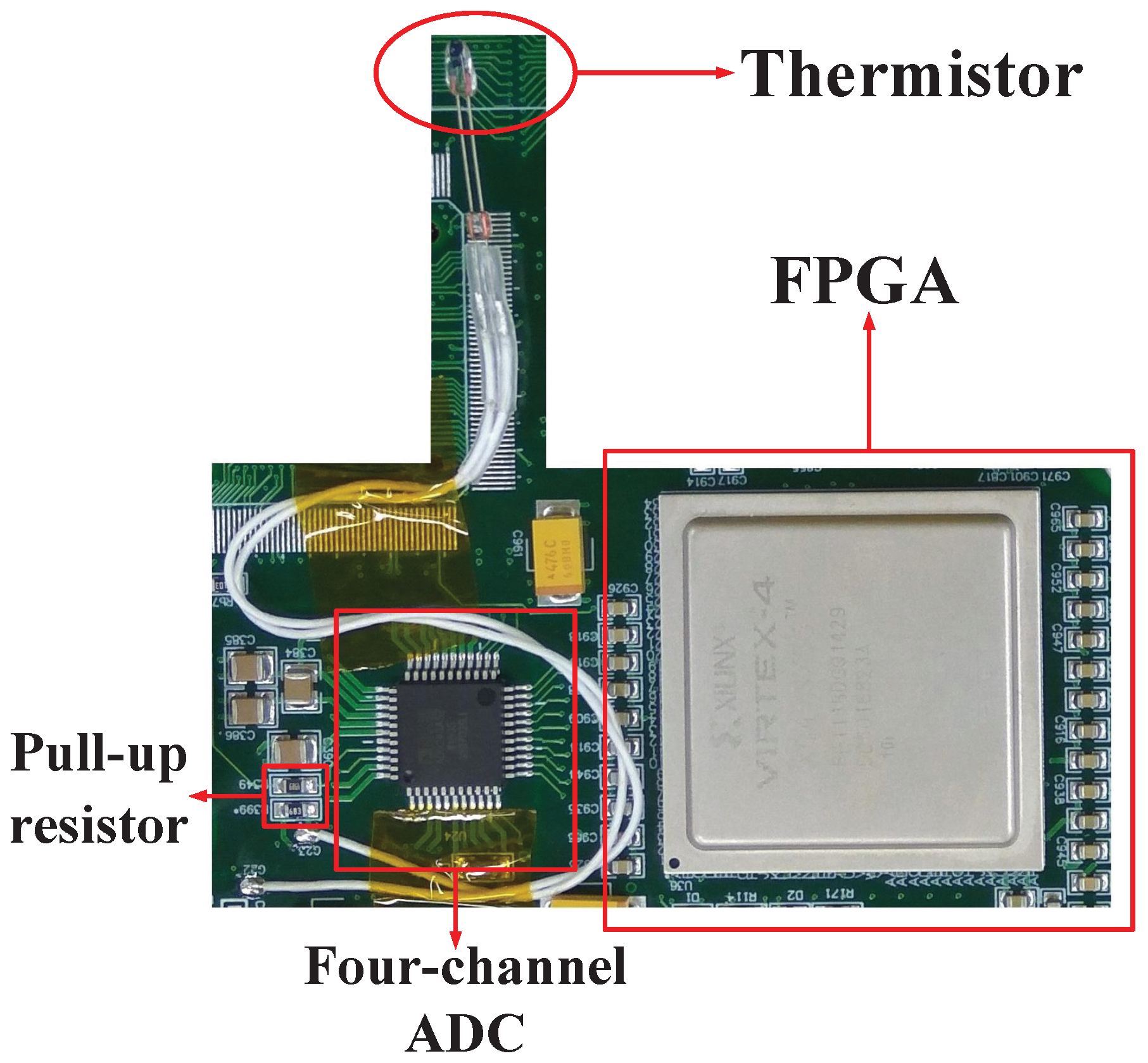
3.3. Circuit Design
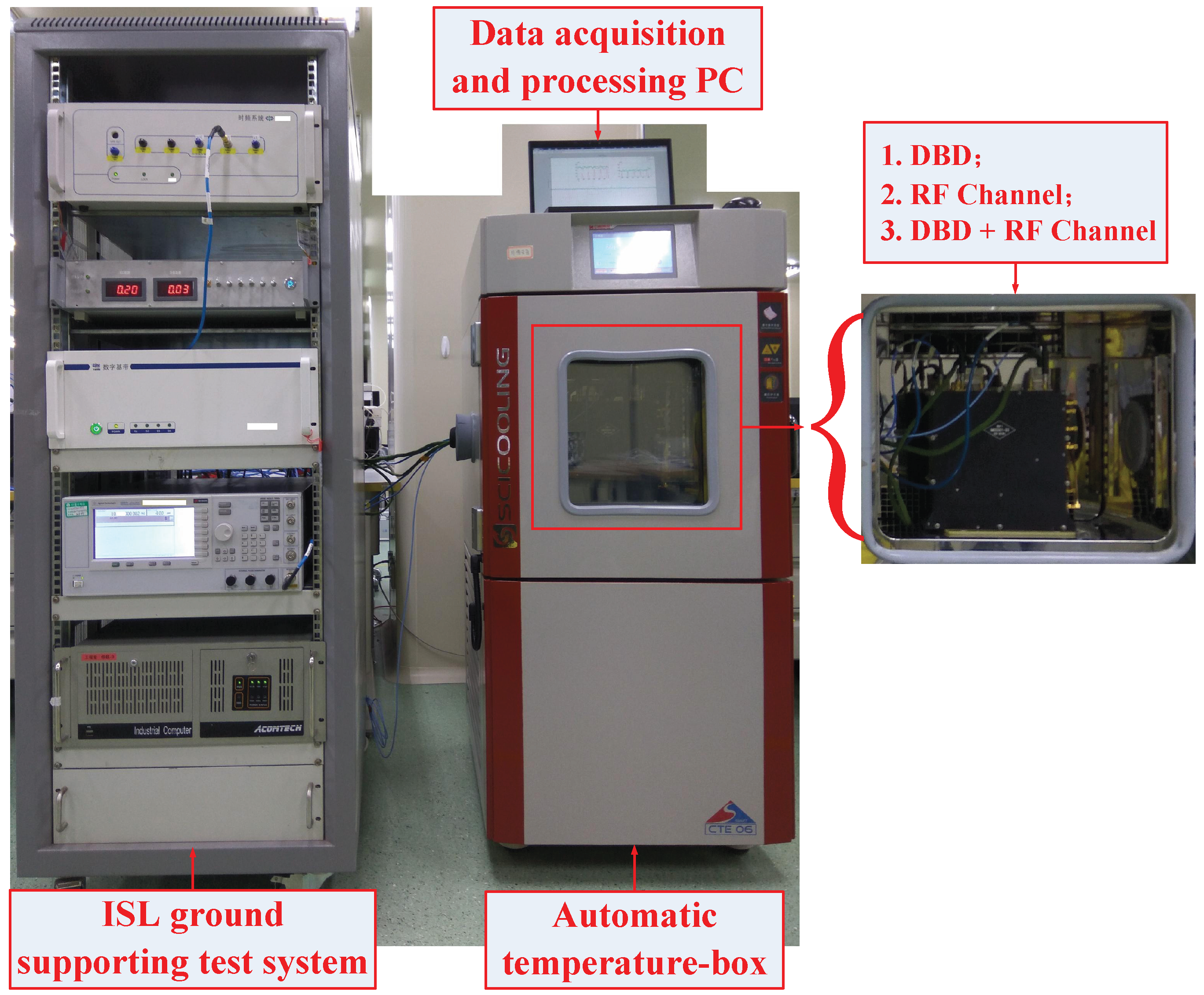
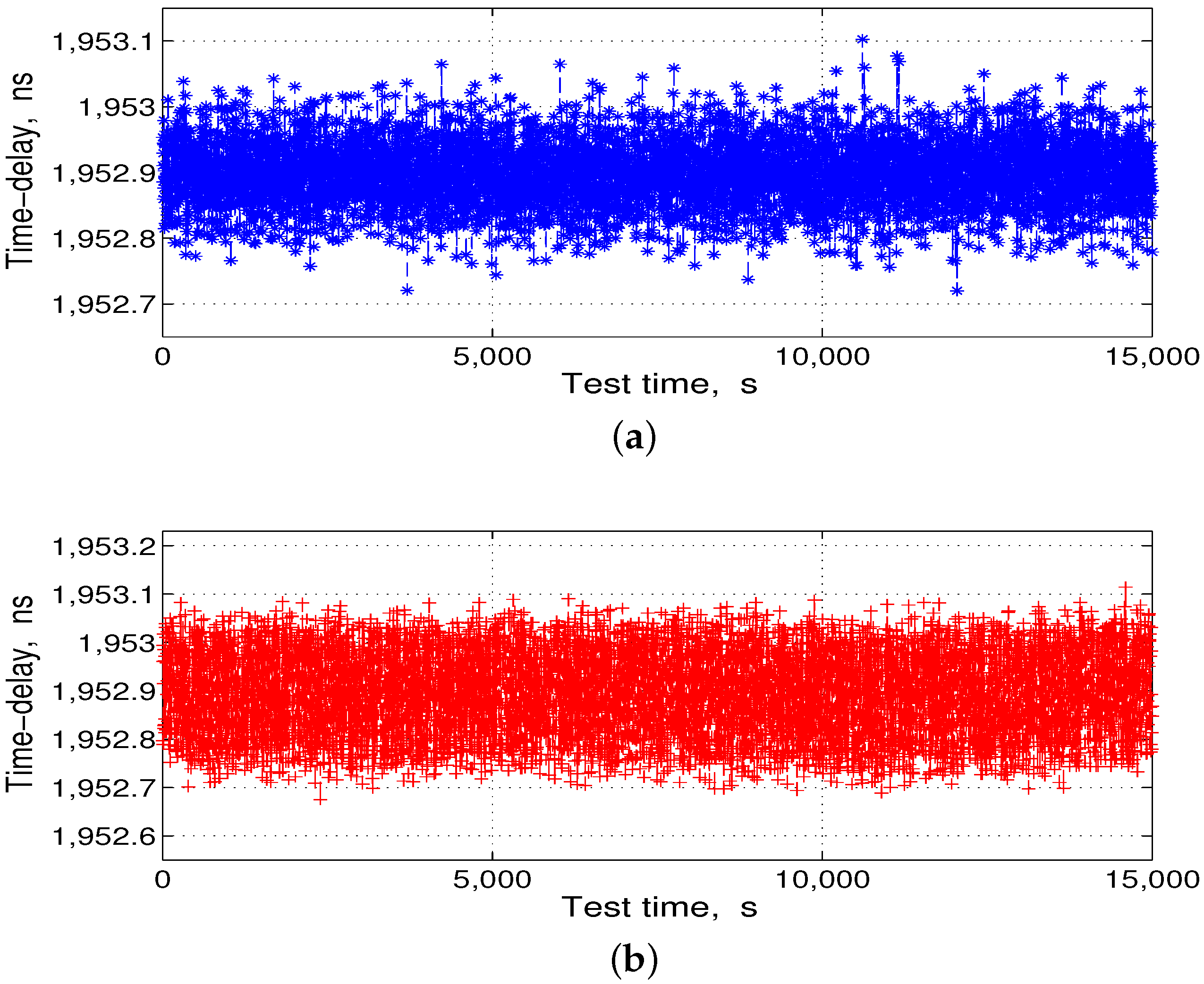
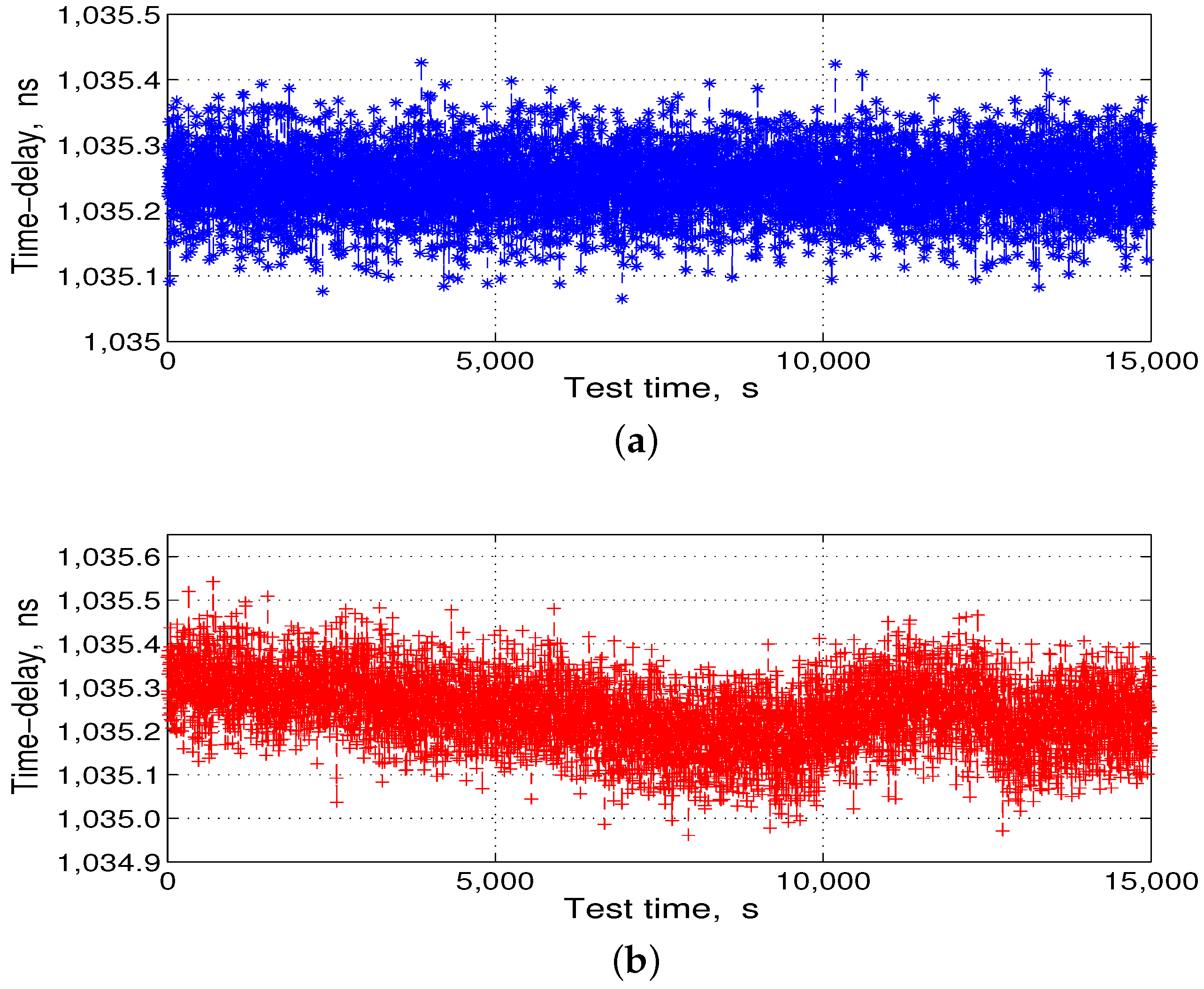
4. Field Data Collection and Ranging Experiment
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Kovach, K. Continuity: The hardest GNSS requirement of all. In Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION-GPS-98), Nashvill, TN, USA, 15–18 September 1998; pp. 2003–2019. [Google Scholar]
- Maine, K.P.; Anderson, P.; Langer, J. Crosslinks for the next-generation GPS. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 8–15 March 2003; pp. 1589–1595. [Google Scholar]
- Revnivych, S. Developments and Plans of the GLONASS System. In Proceedings of the UN/USA International Meeting of Experts the Use and Application of Global Navigation Satellite Systems, Vienna, Austria, 11–15 November 2002. [Google Scholar]
- Polischuk, G.; Revnivych, S. Status and development of GLONASS. Acta Astronaut. 2004, 54, 949–955. [Google Scholar] [CrossRef]
- Amarillo, F.; Gerner, J.L.; Sanchez, M. The ESA GNSS+ project: Inter-Satellite ranging and communication links in the frame of the GNSS infrastructure evolutions. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 16–19 September 2008; pp. 2538–2546. [Google Scholar]
- Chen, Y.; Hu, X.; Zhou, S.; Song, X.; Huang, Y.; Mao, Y.; Huang, C.; Chang, Z.; Wu, S. A new autonomous orbit determination algorithm based on inter-satellite ranging measurements. Sci. Sin. Phys. Mech. Astron. 2015, 45, 79511. (In Chinese) [Google Scholar] [CrossRef]
- Liu, J.; Geng, T.; Zhao, Q. Enhancing precise orbit determination of Compass with inter-satellite observations. Surv. Rev. 2011, 43, 333–342. [Google Scholar] [CrossRef]
- Wang, D.X.; Xin, J.; Xue, F.; Guo, R.; Xie, J.S.; Chen, J.P. Development and Prospect of GNSS Autonomous Navigation Based on Inter-Satellite Link. J. Astronaut. 2016, 37, 1279–1285. [Google Scholar]
- Li, L.L.; Geng, G.T.; Li, Z.H. Study of the development of the inter-satellite links in foreign GNSS. J. Geomat. Sci. Technol. 2016, 33, 133–138. [Google Scholar]
- Ananda, M.P.; Bernstein, H.; Cunningham, K.E. Global positioning system (GPS) autonomous navigation. In Proceedings of the 1990 IEEE Position Location and Navigation Symposium, Las Vegas, NV, USA, 20–23 March 1990; pp. 479–508. [Google Scholar]
- Song, X. Study on the Orbit Determination of COMPASS Navigation Satellites. Ph.D. Thesis, Chang’an University, Xi’an, China, 2009. [Google Scholar]
- Tang, C.; Hu, X.; Zhou, S.; Pan, J.; Guo, R.; Hu, G.; Zhu, L.; Li, X.; Wu, S.; Wang, Y.; et al. Centralized autonomous orbit determination of Beidou navigation satellites with inter-satellite link measurements: Preliminary results. Sci. Sin. Phys. Mech. Astron. 2017, 47, 1–11. (In Chinese) [Google Scholar] [CrossRef]
- Wu, J.; Cheng, Y.J.; Fan, Y. A wideband high-gain high-efficiency hybrid integrated plate array antenna for V-band. IEEE Trans. Antennas Propag. 2015, 63, 1225–1233. [Google Scholar] [CrossRef]
- Li, X.B.; Wang, Y.K.; Chen, J.Y.; Ni, S.C. Rapid acquisition assisted by navigation data for inter-satellite links of navigation constellation. IEICE Trans. Commun. 2014, 4, 915–922. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, Y.; Chen, J.; Guo, X. High-sensitive acquisition of signals for inter-satellite links of navigation constellation. Electron. Lett. 2015, 51, 1879–1880. [Google Scholar] [CrossRef]
- Yang, Z.; Ji, R.; Lu, Z.; Shen, Y.; Shao, S. Analysis and Design of An Optimized Constellation Inter-Satellite. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 1665–1669. [Google Scholar]
- Tang, Y.; Wang, Y.; Chen, J. The Availability of Space Service for Inter-Satellite Links in Navigation Constellations. Sensors 2016, 16, 1327. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.Y.; Zhou, Y.B.; Yang, J. The space-based high-precision time transfer method based on navigation constellation inter-satellite link. Sci. Sin. Technol. 2017, 47, 71–79. (In Chinese) [Google Scholar] [CrossRef]
- Meng, Z.; Yang, J.; Guo, X.; Hu, M. Phase compensation sensor for ranging consistency in inter-satellite links of navigation constellation. Sensors 2017, 17, 461. [Google Scholar] [CrossRef] [PubMed]
- Imae, M.; Aida, M.; Gotoh, T.; Shibuya, Y.; Kurihara, N. Delay calibration method for precise and accurate two way satellite time and frequency transfer. In Proceedings of the IEEE Conference Digest Conference on Precision Electromagnetic Measurements, Ottawa, ON, Canada, 16–21 June 2002; pp. 450–451. [Google Scholar]
- Wu, W.J.; Li, Z.G.; Li, X.H.; Yang, X.H.; Chen, L.; Gong, J.J. The effect of temperature on transfer ranging equipment delay. J. Time Freq. 2013, 36, 113–119. [Google Scholar]
- Gao, S.; Gong, L.; Dong, J.F. The influence factors for time-delay idiosyncrasy for meterage-equipment of GNSS. In Proceedings of the 5th China Satellite Navigation Conference, Nanjing, China, 21–23 May 2014. [Google Scholar]
- Zhang, H.; Li, H.X. Study on converter path delay vary with temperature in TWSTFT. In Proceedings of the 2nd China Satellite Navigation Conference, Shanghai, China, 21–23 May 2011. [Google Scholar]
- Parker, T.E.; Zhang, V. Sources of instabilities in two-way satellite time transfer. In Proceedings of the 37th Annual Precise Time and Time Interval Systems and Applications Meeting, Vancouver, BC, Canada, 29–31 August 2005; pp. 745–751. [Google Scholar]
- Fujieda, M.; Aida, M.; Maeno, H.; Tung, L.Q.; Amagai, J. Delay difference calibration of TWSTFT earth station using multichannel modem. IEEE Trans. Instrum. Meas. 2007, 56, 346–350. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | TC, Unit: ps/°C | Comments |
|---|---|---|
| HPA | −5 (±2) | Transmission path |
| LNA and filter | −5 to +2 (±2) | Reception path |
| Mixer and isolator | −18 (±2) | Transmission path or reception path |
| Up-Converters | −4 to +1 (±2) | Transmission path |
| Down-Converters | +2 to +10 (±2) | Reception path |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, Z.; Yang, J.; Guo, X.; Zhou, Y. Ranging Consistency Based on Ranging-Compensated Temperature-Sensing Sensor for Inter-Satellite Link of Navigation Constellation. Sensors 2017, 17, 1369. https://doi.org/10.3390/s17061369
Meng Z, Yang J, Guo X, Zhou Y. Ranging Consistency Based on Ranging-Compensated Temperature-Sensing Sensor for Inter-Satellite Link of Navigation Constellation. Sensors. 2017; 17(6):1369. https://doi.org/10.3390/s17061369
Chicago/Turabian StyleMeng, Zhijun, Jun Yang, Xiye Guo, and Yongbin Zhou. 2017. "Ranging Consistency Based on Ranging-Compensated Temperature-Sensing Sensor for Inter-Satellite Link of Navigation Constellation" Sensors 17, no. 6: 1369. https://doi.org/10.3390/s17061369
APA StyleMeng, Z., Yang, J., Guo, X., & Zhou, Y. (2017). Ranging Consistency Based on Ranging-Compensated Temperature-Sensing Sensor for Inter-Satellite Link of Navigation Constellation. Sensors, 17(6), 1369. https://doi.org/10.3390/s17061369