
Modeling the Error of the Medtronic Paradigm Veo Enlite Glucose Sensor

 ,
,  ,
, 
Abstract
:1. Introduction
2. Research Design and Methods
2.1. Study Population
2.2. Study Procedures
2.3. Dataset
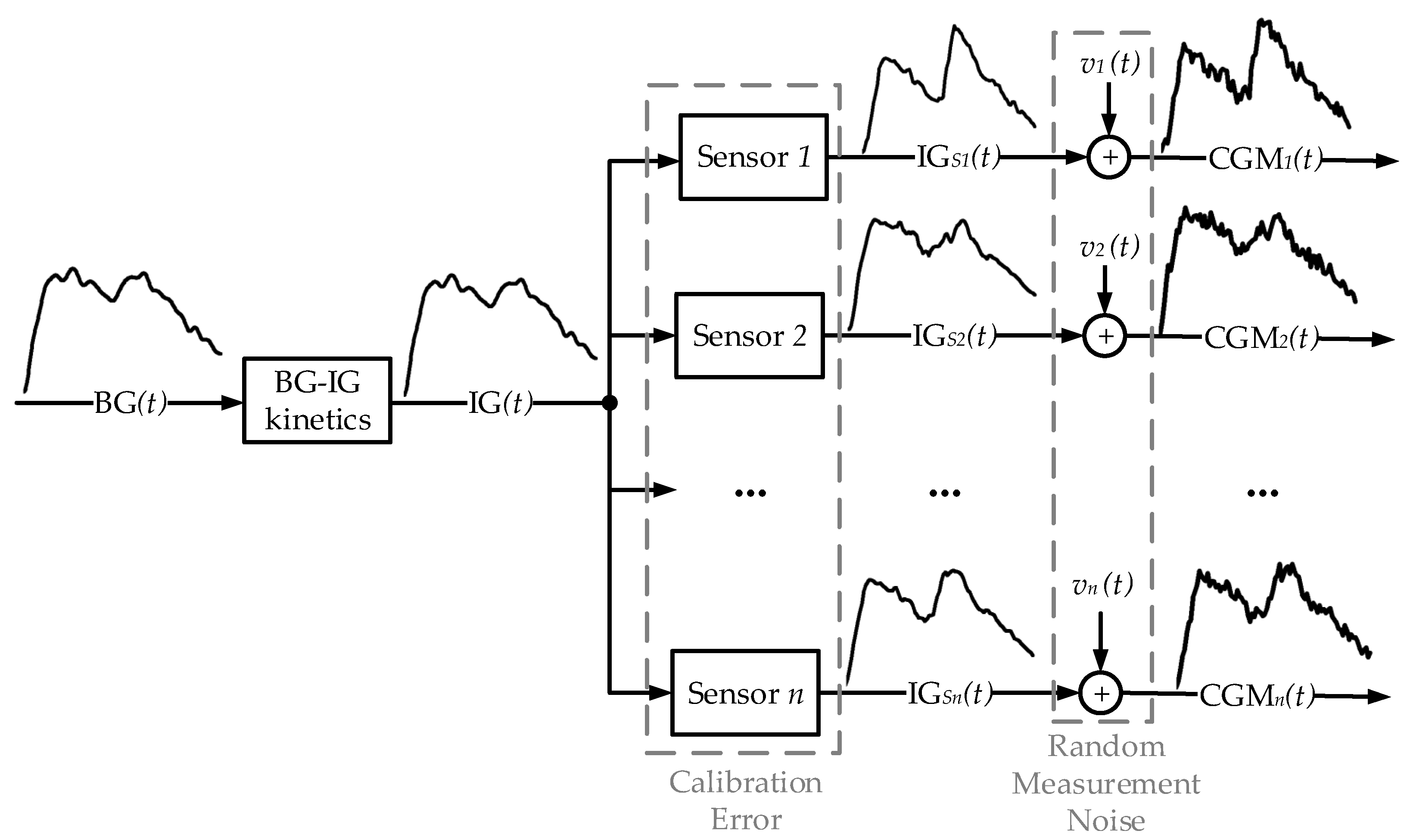
2.4. CGM Error Model
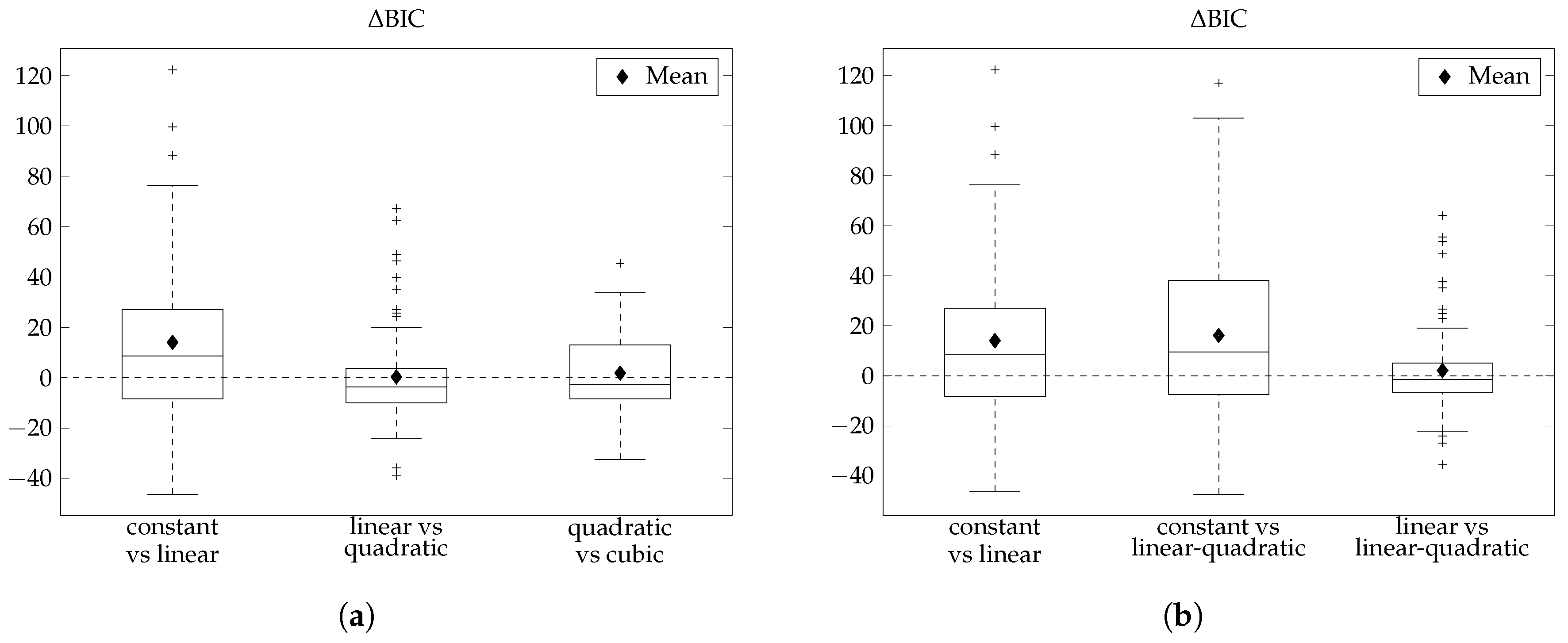
2.4.1. BG-IG Kinetics
2.4.2. Calibration Error
2.4.3. Measurement Noise
2.5. Identification of the Unknown Parameters
3. Results
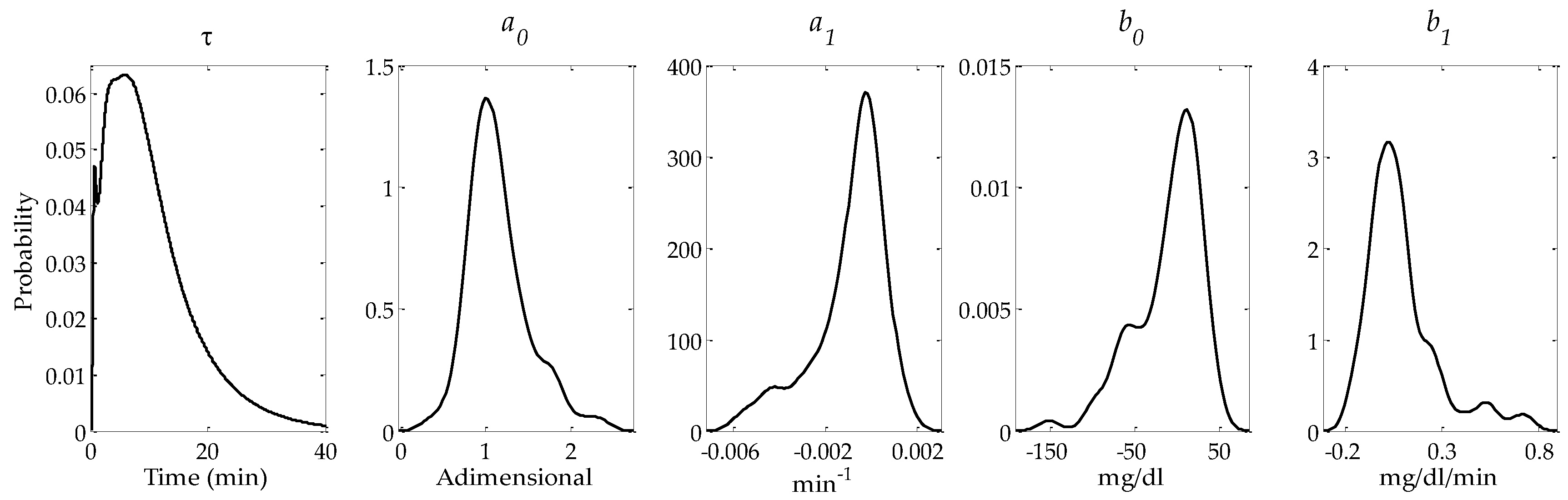
3.1. Parameters Estimated
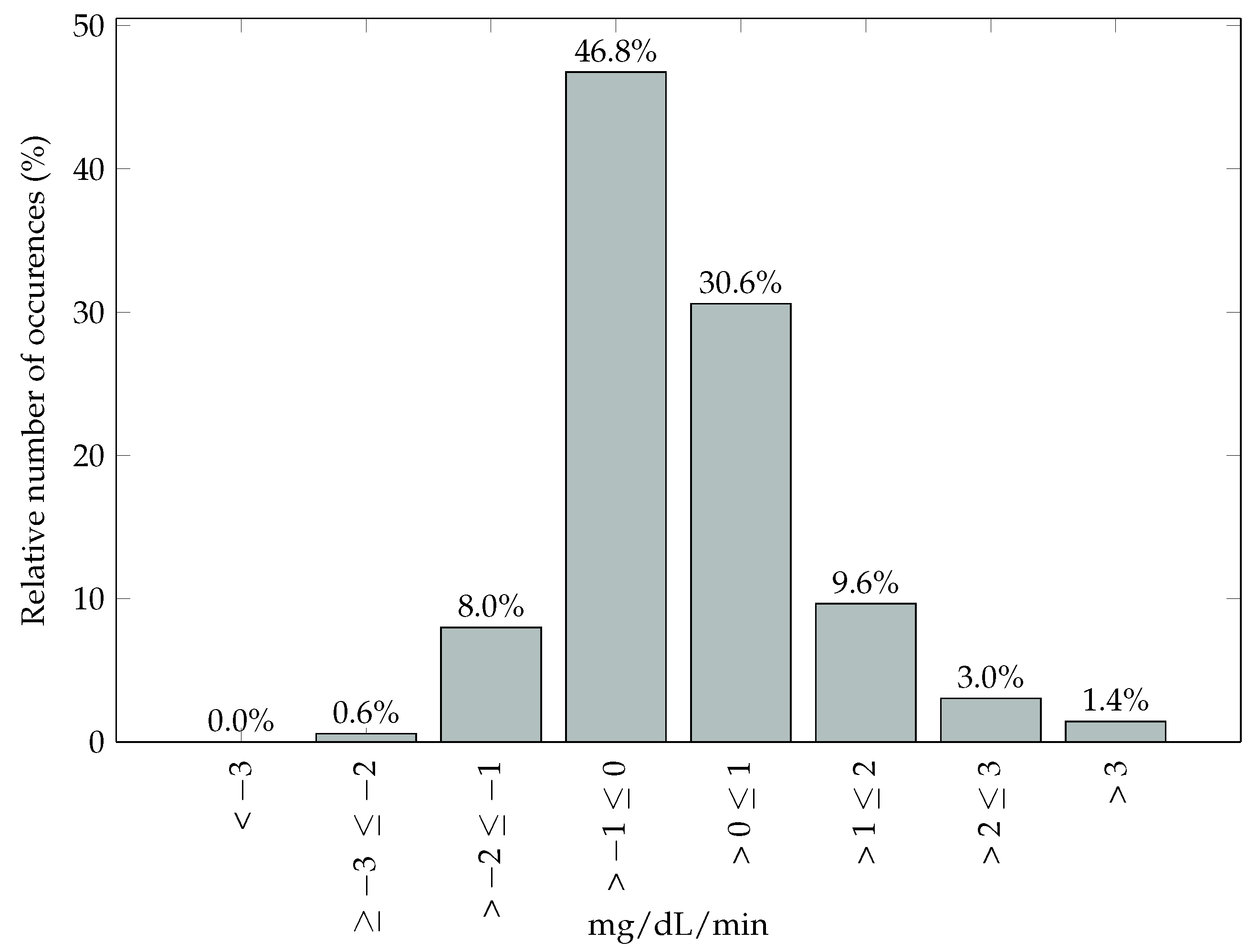
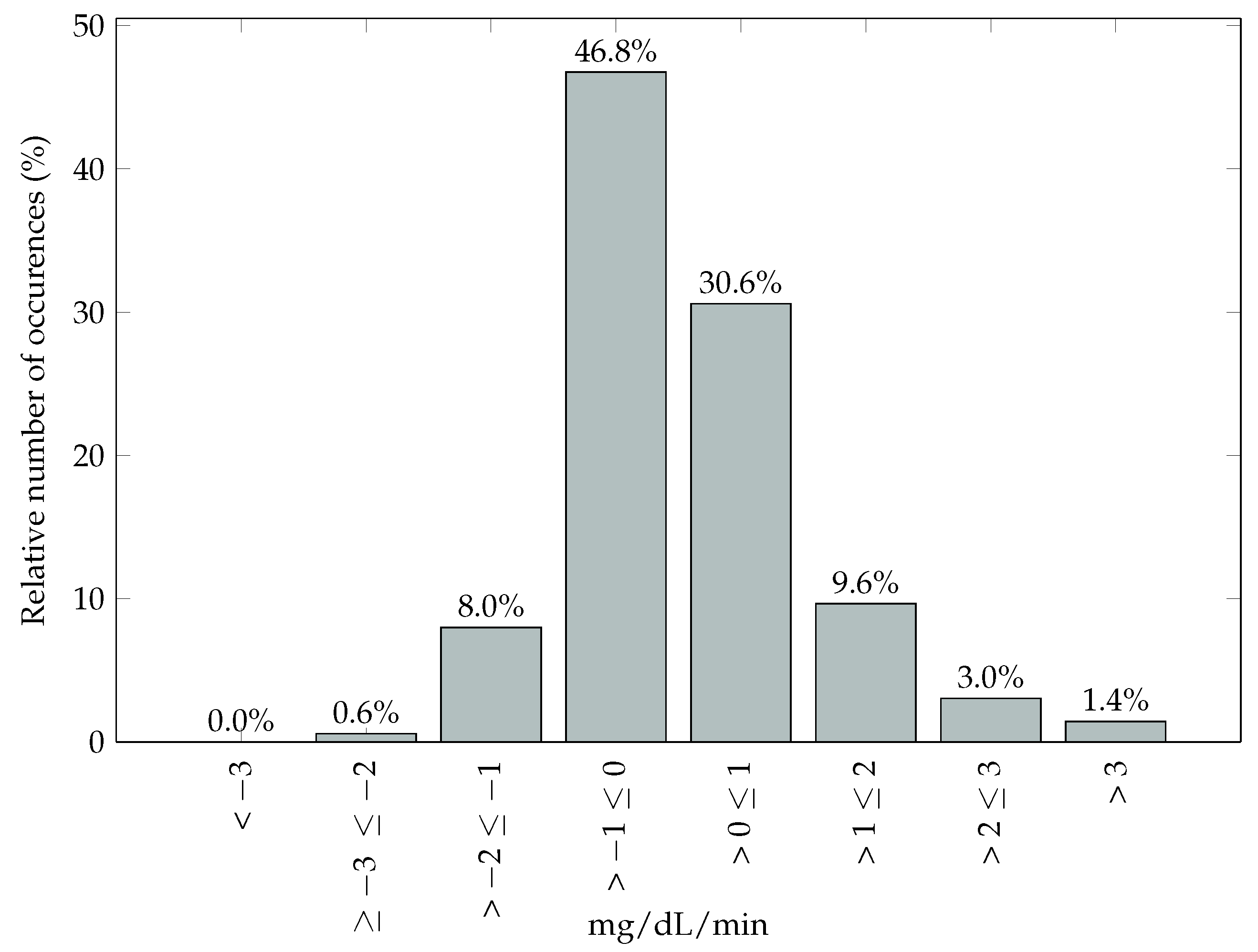
3.2. Measurement Noise Level
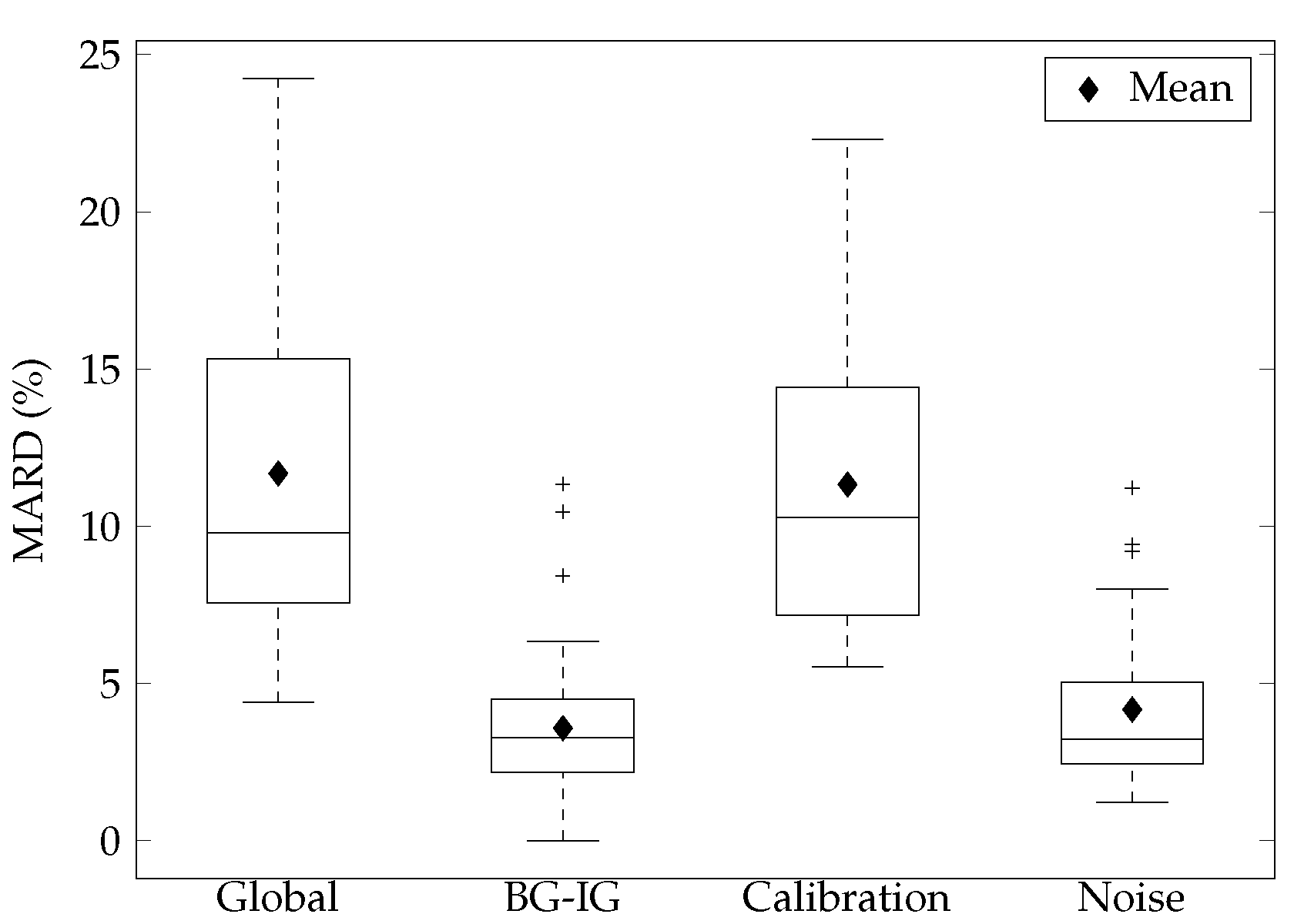
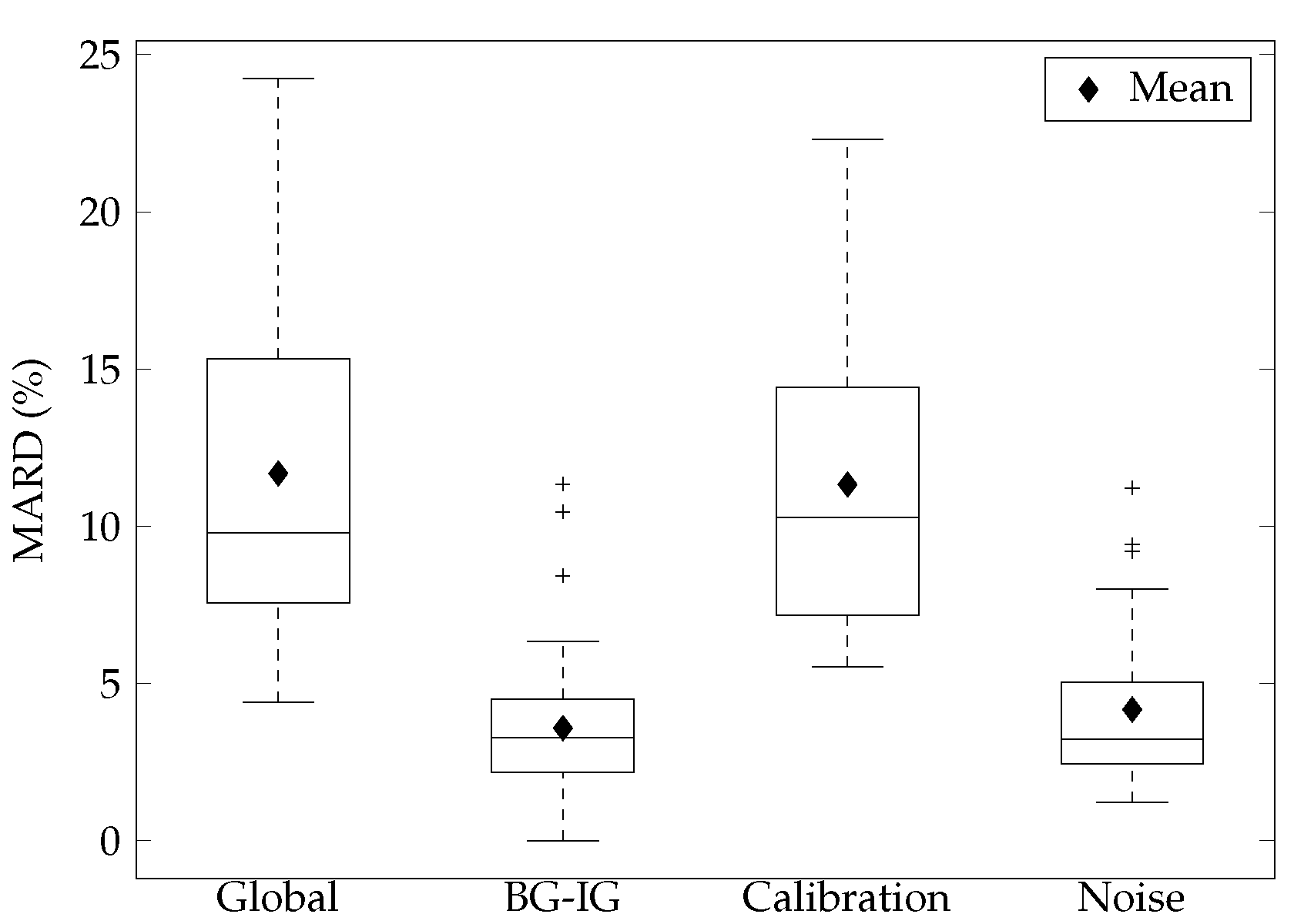
3.3. Sensor Error Dissection
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 7P | SEVEN PLUS Sensor |
| AP | Artificial Pancreas |
| AR | Autoregressive |
| ARMA | Autoregressive Moving Average |
| BG | Blood Glucose |
| BG-IG | Blood-to-Interstitium Glucose Kinetics |
| BIC | Bayesian Information Criterion |
| BMI | Body Mass Index |
| CGM | Continuous Glucose Monitor |
| CH | Carbohydrate |
| CL | Closed-Loop |
| CSII | Continuous Subcutaneous Insulin Infusion |
| CV | Coefficient of Variation |
| ENL | Second Generation Medtronic Paradigm Veo Enlite Sensor |
| FDA | Food and Drug Administration |
| FBR | Foreign Body Response |
| G4AP | Advanced G4 Sensor for Artificial Pancreas Studies |
| G4P | G4 PLATINUM Sensor |
| IG | Interstitial Glucose |
| MARD | Mean Absolute Relative Difference |
| OL | Open-Loop |
| SD | Standard Deviation |
| SMBG | Self Monitoring Blood Glucose |
| SMRC | Sliding Mode Reference Conditioning |
| T1D | Type 1 Diabetes |
References
- Bode, B. Clinical utility of the continuous glucose monitoring system. Diabetes Technol. Ther. 2000, 2, S35–S41. [Google Scholar] [CrossRef] [PubMed]
- Cobelli, C.; Renard, E.; Kovatchev, B. Artificial Pancreas: Past, Present, Future. Diabetes 2011, 60, 2672–2682. [Google Scholar] [CrossRef] [PubMed]
- Mastrototaro, J. The MiniMed Continuous Glucose Monitoring System. Diabetes Technol. Ther. 2000, 2, 13–18. [Google Scholar] [CrossRef]
- Peyser, T.; Dassau, E.; Breton, M.; Skyler, J. The artificial pancreas: Current status and future prospects in the management of diabetes. Ann. N. Y. Acad. Sci. 2014, 1311, 102–123. [Google Scholar] [CrossRef] [PubMed]
- Feldman, B.; Brazg, R.; Schwartz, S.; Weinstein, R. A Continuous Glucose Sensor Based on Wired Enzyme™ Technology—Results from a 3-Day Trial in Patients with Type 1 Diabetes. Diabetes Technol. Ther. 2003, 5, 769–779. [Google Scholar] [CrossRef] [PubMed]
- Facchinetti, A.; Sparacino, G.; Cobelli, C. Enhanced Accuracy of Continuous Glucose Monitoring by Online Extended Kalman Filtering. Diabetes Technol. Ther. 2010, 12, 353–363. [Google Scholar] [CrossRef] [PubMed]
- Facchinetti, A.; Del Favero, S.; Sparacino, G.; Castle, J.; Ward, W.; Cobelli, C. Modeling the Glucose Sensor Error. IEEE Trans. Biomed. Eng. 2014, 61, 620–629. [Google Scholar] [CrossRef] [PubMed]
- Facchinetti, A.; Del Favero, S.; Sparacino, G.; Cobelli, C. Model of glucose sensor error components: Identification and assessment for new Dexcom G4 generation devices. Med. Biol. Eng. Comput. 2015, 53, 1259–1269. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Garcia-Gancedo, L.; Flewitt, A.J.; Xie, H.; Moussy, F.; Milne, W.I. A Critical Review of Glucose Biosensors Based on Carbon Nanomaterials: Carbon Nanotubes and Graphene. Sensors 2012, 12, 5996–6022. [Google Scholar] [CrossRef] [PubMed]
- King, C.; Anderson, S.M.; Breton, M.; Clarke, W.L.; Kovatchev, B.P. Modeling of Calibration Effectiveness and Blood-to-Interstitial Glucose Dynamics as Potential Confounders of the Accuracy of Continuous Glucose Sensors during Hyperinsulinemic Clamp. J. Diabetes Sci. Technol. 2007, 1, 317–322. [Google Scholar] [CrossRef] [PubMed]
- Kovatchev, B.P.; King, C.; Breton, M.; Anderson, S. Clinical Assessment and Mathematical Modeling of the Accuracy of Continuous Glucose Sensors (CGS). In Proceedings of the 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 31 August–3 September 2006; pp. 71–74. [Google Scholar]
- Dalla Man, C.; Micheletto, F.; Lv, D.; Breton, M.; Kovatchev, B.; Cobelli, C. The UVA/PADOVA Type 1 Diabetes Simulator: New Features. J. Diabetes Sci. Technol. 2014, 8, 26–34. [Google Scholar]
- Facchinetti, A. Continuous Glucose Monitoring Sensors: Past, Present and Future Algorithmic Challenges. Sensors 2016, 16, 2093. [Google Scholar] [CrossRef] [PubMed]
- Anonymous. FDA Advisory Panel Votes to Recommend Non-Adjunctive Use of Dexcom G5 Mobile CGM. Diabetes Technol. Ther. 2016, 18, 512–516. [Google Scholar]
- Edelman, S.V. Regulation Catches Up to Reality: Nonadjunctive Use of Continuous Glucose Monitoring Data. J. Diabetes Sci. Technol. 2016, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Breton, M.; Kovatchev, B. Analysis, modeling, and simulation of the accuracy of continuous glucose sensors. J. Diabetes Sci. Technol. 2008, 2, 853–862. [Google Scholar] [CrossRef] [PubMed]
- Facchinetti, A.; Sparacino, G.; Cobelli, C. Modeling the error of continuous glucose monitoring sensor data: Critical aspects discussed through simulation studies. J. Diabetes Sci. Technol. 2010, 4, 4–14. [Google Scholar] [CrossRef] [PubMed]
- Laguna, A.J.; Rossetti, P.; Ampudia-Blasco, F.J.; Vehí, J.; Bondia, J. Postprandial performance of Dexcom SEVEN PLUS and Medtronic Paradigm Veo: Modeling and statistical analysis. Biomed. Signal Process. Control 2014, 10, 322–331. [Google Scholar] [CrossRef]
- ClinicalTrials.gov. Improving Postprandial Glycaemia by a New Developed Closed-Loop Control System -Closedloop4meals (CL4M-Controls)-NCT02100488; National Library of Medicine: Bethesda, MD, USA, 2015.
- Rossetti, P.; Quirós, C.; Moscardó, V.; Comas, A.; Giménez, M.; Ampudia-Blasco, F.J.; León, F.; Montaser, E.; Conget, I.; Bondia, J.; et al. Closed-loop control of postprandial glycemia using an insulin-on-board limitation through continuous action on glucose target. Diabetes Technol. Ther. 2017, in press. [Google Scholar] [CrossRef] [PubMed]
- Revert, A.; Garelli, F.; Pico, J.; De Battista, H.; Rossetti, P.; Vehi, J.; Bondia, J. Safety Auxiliary Feedback Element for the Artificial Pancreas in Type 1 Diabetes. IEEE Trans. Biomed. Eng. 2013, 60, 2113–2122. [Google Scholar] [CrossRef] [PubMed]
- Facchinetti, A.; Sparacino, G.; Cobelli, C. Online Denoising Method to Handle Intraindividual Variability of Signal-to-Noise Ratio in Continuous Glucose Monitoring. IEEE Trans. Biomed. Eng. 2011, 58, 2664–2671. [Google Scholar] [CrossRef] [PubMed]
- Rebrin, K.; Steil, G.M.; van Antwerp, W.P.; Mastrototaro, J.J. Subcutaneous glucose predicts plasma glucose independent of insulin: Implications for continuous monitoring. Am. J. Physiol. 1999, 277, E561–E571. [Google Scholar] [PubMed]
- Christiansen, M.; Bailey, T.; Watkins, E.; Liljenquist, D.; Price, D.; Nakamura, K.; Boock, R.; Peyser, T. A New-Generation Continuous Glucose Monitoring System: Improved Accuracy and Reliability Compared with a Previous-Generation System. Diabetes Technol. Ther. 2013, 15, 881–888. [Google Scholar] [CrossRef] [PubMed]
- Garcia, A.; Rack-Gomer, A.L.; Bhavaraju, N.C.; Hampapuram, H.; Kamath, A.; Peyser, T.; Facchinetti, A.; Zecchin, C.; Sparacino, G.; Cobelli, C. Dexcom G4AP: An advanced continuous glucose monitor for the artificial pancreas. J. Diabetes Sci. Technol. 2013, 7, 1436–1445. [Google Scholar] [CrossRef] [PubMed]
- Keenan, D.B.; Mastrototaro, J.J.; Zisser, H.; Cooper, K.A.; Raghavendhar, G.; Lee, S.W.; Yusi, J.; Bailey, T.S.; Brazg, R.L.; Shah, R.V. Accuracy of the Enlite 6-Day Glucose Sensor with Guardian and Veo Calibration Algorithms. Diabetes Technol. Ther. 2012, 14, 225–231. [Google Scholar] [CrossRef] [PubMed]
- Rossetti, P.; Bondia, J.; Vehí, J.; Fanelli, C.G. Estimating Plasma Glucose from Interstitial Glucose: The Issue of Calibration Algorithms in Commercial Continuous Glucose Monitoring Devices. Sensors 2010, 10, 10936–10952. [Google Scholar] [CrossRef] [PubMed]
- McAuley, S.A.; Dang, T.T.; Horsburgh, J.C.; Bansal, A.; Ward, G.M.; Aroyan, S.; Jenkins, A.J.; MacIsaac, R.J.; Shah, R.V.; O’Neal, D.N. Feasibility of an Orthogonal Redundant Sensor incorporating Optical plus Redundant Electrochemical Glucose Sensing. J. Diabetes Sci. Technol. 2016, 10, 679–688. [Google Scholar] [CrossRef] [PubMed]
- Ward, W.K. A review of the foreign-body response to subcutaneously- implanted devices: Role of macrophages and cytokines in biofouling and fibrosis. J. Diabetes Sci. Technol. 2008, 2, 768–777. [Google Scholar] [CrossRef] [PubMed]
- Klueh, U.; Liu, Z.; Feldman, B.; Henning, T.P.; Cho, B.; Ouyang, T.; Kreutzer, D. Metabolic biofouling of glucose sensors in vivo: Role of tissue microhemorrhages. J. Diabetes Sci. Technol. 2011, 5, 583–595. [Google Scholar] [CrossRef] [PubMed]
- Castle, J.R.; Pitts, A.; Hanavan, K.; Muhly, R.; El Youssef, J.; Hughes-Karvetski, C.; Kovatchev, B.; Ward, W.K. The Accuracy Benefit of Multiple Amperometric Glucose Sensors in People With Type 1 Diabetes. Diabetes Care 2012, 35, 706–710. [Google Scholar] [CrossRef] [PubMed]
- Bailey, T.; Zisser, H.; Chang, A. New Features and Performance of a Next-Generation SEVEN-Day Continuous Glucose Monitoring System with Short Lag Time. Diabetes Technol. Ther. 2009, 11, 749–755. [Google Scholar] [CrossRef] [PubMed]
- Rebrin, K.; Steil, G.M. Can interstitial glucose assessment replace blood glucose measurements? Diabetes Technol. Ther. 2000, 2, 461–472. [Google Scholar] [CrossRef] [PubMed]
- Steil, G.M.; Rebrin, K.; Hariri, F.; Jinagonda, S.; Tadros, S.; Darwin, C.; Saad, M.F. Interstitial fluid glucose dynamics during insulin-induced hypoglycaemia. Diabetologia 2005, 48, 1833–1840. [Google Scholar] [CrossRef] [PubMed]
- Wilson, D.M.; Beck, R.W.; Tamborlane, W.V.; Dontchev, M.J.; Kollman, C.; Chase, P.; Fox, L.A.; Ruedy, K.J.; Tsalikian, E.; Weinzimer, S.; et al. The accuracy of the FreeStyle Navigator continuous glucose monitoring system in children with type 1 diabetes. Diabetes Care 2007, 30, 59–64. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, S.; Finan, D.A.; Duun-Henriksen, A.K.; Jorgensen, J.B.; Madsen, H.; Bengtsson, H.; Holst, J.J.; Madsbad, S.; Norgaard, K. Effects of everyday life events on glucose, insulin, and glucagon dynamics in continuous subcutaneous insulin infusion-treated type 1 diabetes: Collection of clinical data for glucose modeling. Diabetes Technol. Ther. 2012, 14, 210–217. [Google Scholar] [CrossRef] [PubMed]
- Kropff, J.; Bruttomesso, D.; Doll, W.; Farret, A.; Galasso, S.; Luijf, Y.M.; Mader, J.K.; Place, J.; Boscari, F.; Pieber, T.R.; et al. Accuracy of two continuous glucose monitoring systems: A head-to-head comparison under clinical research centre and daily life conditions. Diabetes Obes. Metab. 2015, 17, 343–349. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of T1D Patients | 10 |
|---|---|
| Sex | 2 m, 8 f |
| Age (years) | 44.5 ± 10.7 |
| HbA1c (%) | 7.9 ± 0.5 |
| Body Mass Index (kg/m) | 27.6 ± 2.5 |
| Time with T1D (years) | 23.1 ± 9.7 |
| Time with pump (years) | 8.5 ± 4.4 |
| Model | Parameter | Mean | SD | Percentile | % of Values Estimate with | ||||
|---|---|---|---|---|---|---|---|---|---|
| 50th | 5th | 95th | CV < 10% | CV < 20% | CV < 30% | ||||
| ENL | 9.4 | 6.5 | 8.4 | 0.3 | 23.4 | 92 | 95 | 95 | |
| m = 1 | 1.1 | 0.4 | 1.1 | 0.7 | 1.8 | 100 | 100 | 100 | |
| l = 1 | 0.0016 | −0.0044 | 0.0009 | 74 | 85 | 91 | |||
| p = 5 | −11.2 | 38.8 | −0.5 | −90.7 | 36.1 | 80 | 88 | 92 | |
| day 2 | 0.09 | 0.19 | 0.05 | −0.13 | 0.52 | 70 | 81 | 86 | |
| 10.1 | 7.0 | 9.3 | 1.5 | 24.3 | 97 | 97 | 97 | ||
| ENL | 1.1 | 0.4 | 1.1 | 0.6 | 1.8 | 100 | 100 | 100 | |
| m = 1 | −0.0010 | 0.0018 | −0.0010 | −0.0041 | 0.0030 | 77 | 89 | 91 | |
| l = 2 | −10.5 | 44.7 | −9.0 | −73.7 | 48.5 | 76 | 89 | 95 | |
| p = 6 | 0.09 | 0.47 | 0.03 | −0.31 | 0.78 | 72 | 84 | 92 | |
| day 2 | 0.0000 | 0.0008 | 0.0001 | −0.0012 | 0.0008 | 72 | 82 | 89 | |
| Day of Analysis | Median Variance | ||
|---|---|---|---|
| cc | ssc | ||
| ENL | 2 | 27.4 | 8.7 |
| 7P | 2 | 57.6 | 31.5 |
| G4P | 4 | 36.3 | 11.7 |
| G4AP | 4 | 31.0 | 8.9 |
| Sensor | Day of Analysis | MARD % | ||||
|---|---|---|---|---|---|---|
| Global | BG-IG | Calibration | Noise | |||
| ENL | 2 | Mean | 11.7 | 3.6 | 11.3 | 4.2 |
| Median | 9.8 | 3.3 | 10.3 | 3.2 | ||
| 7P | 2 | Mean | 14.2 | 3.5 | 12.8 | 5.6 |
| 7P | 1 | Median | 14.1 | 6.8 | 14.1 | 5.4 |
| G4P | 1, 4, 7 | Median | 11.2 | 4.4 | 9.4 | 3.7 |
| G4AP | 1, 4, 7 | Median | 10.0 | 3.4 | 9.4 | 3.7 |
| Model | Parameter | Percentile | % of Values Estimate with | |||
|---|---|---|---|---|---|---|
| 50th | 5th | 95th | CV < 10% | CV < 30% | ||
| 6.7 | 2.2 | 12.5 | 97 | 97 | ||
| 7P | 1.1 | 0.5 | 2.4 | 100 | 100 | |
| m = l = 1 | 0.0002 | 0.0012 | 79 | 94 | ||
| day 2 | 63.4 | 83 | 95 | |||
| 0.04 | 0.70 | 77 | 94 | |||
| Model | Parameter | Mean | SD | % of Values Estimate with |
|---|---|---|---|---|
| CV < 20% | ||||
| 9.7 | 3.6 | – | ||
| G4P | 1.16 | 0.31 | 100 | |
| m = l = 1 | 0.000791 | 97 | ||
| day 1 | 55.6 | 97 | ||
| 0.0027 | 0.1289 | 91 | ||
| G4P | 9.7 | 3.6 | – | |
| m = l = 0 | 1.04 | 0.16 | 100 | |
| day 4 | 2.8 | 15.8 | 100 | |
| G4P | 9.7 | 3.6 | – | |
| m = l = 0 | 1.05 | 0.18 | 100 | |
| day 7 | 1.9 | 25.6 | 100 | |
| 7.7 | 3.0 | – | ||
| G4AP | 1.09 | 0.26 | 100 | |
| m = l = 1 | 0.000615 | 94 | ||
| day 1 | 50.1 | 94 | ||
| 0.0133 | 0.1090 | 90 | ||
| G4AP | 7.7 | 3.0 | – | |
| m = l = 0 | 1.05 | 0.15 | 100 | |
| day 4 | 14.9 | 100 | ||
| G4AP | 7.7 | 3.0 | – | |
| m = l = 0 | 1.07 | 0.13 | 100 | |
| day 7 | 16.2 | 100 |
| Sensor/Trial | Subjects | Sessions | Duration (h) | Sensor Day |
|---|---|---|---|---|
| ENL | 10 | 37 | 8 | 2 |
| 7P [31] | 19 | 36 | 9 | 2 |
| 7P [32] | 53 | 53 * | 8 | 1, 4, 7 |
| G4P [24] G4AP [25] | 36 | 108 * | 12 | 1, 4, 7 |
| Glycemic Range (mg/dL) | n | Time | MARD | |
|---|---|---|---|---|
| % | Mean | SD | ||
| <70 | 160 | 2.25 | 16.59 | 13.60 |
| 70–180 | 4584 | 64.45 | 12.60 | 10.84 |
| >180 | 2369 | 33.31 | 9.57 | 9.08 |
| Overall | 7113 | 100 | 11.68 | 10.48 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Biagi, L.; Ramkissoon, C.M.; Facchinetti, A.; Leal, Y.; Vehi, J. Modeling the Error of the Medtronic Paradigm Veo Enlite Glucose Sensor. Sensors 2017, 17, 1361. https://doi.org/10.3390/s17061361
Biagi L, Ramkissoon CM, Facchinetti A, Leal Y, Vehi J. Modeling the Error of the Medtronic Paradigm Veo Enlite Glucose Sensor. Sensors. 2017; 17(6):1361. https://doi.org/10.3390/s17061361
Chicago/Turabian StyleBiagi, Lyvia, Charrise M. Ramkissoon, Andrea Facchinetti, Yenny Leal, and Josep Vehi. 2017. "Modeling the Error of the Medtronic Paradigm Veo Enlite Glucose Sensor" Sensors 17, no. 6: 1361. https://doi.org/10.3390/s17061361
APA StyleBiagi, L., Ramkissoon, C. M., Facchinetti, A., Leal, Y., & Vehi, J. (2017). Modeling the Error of the Medtronic Paradigm Veo Enlite Glucose Sensor. Sensors, 17(6), 1361. https://doi.org/10.3390/s17061361