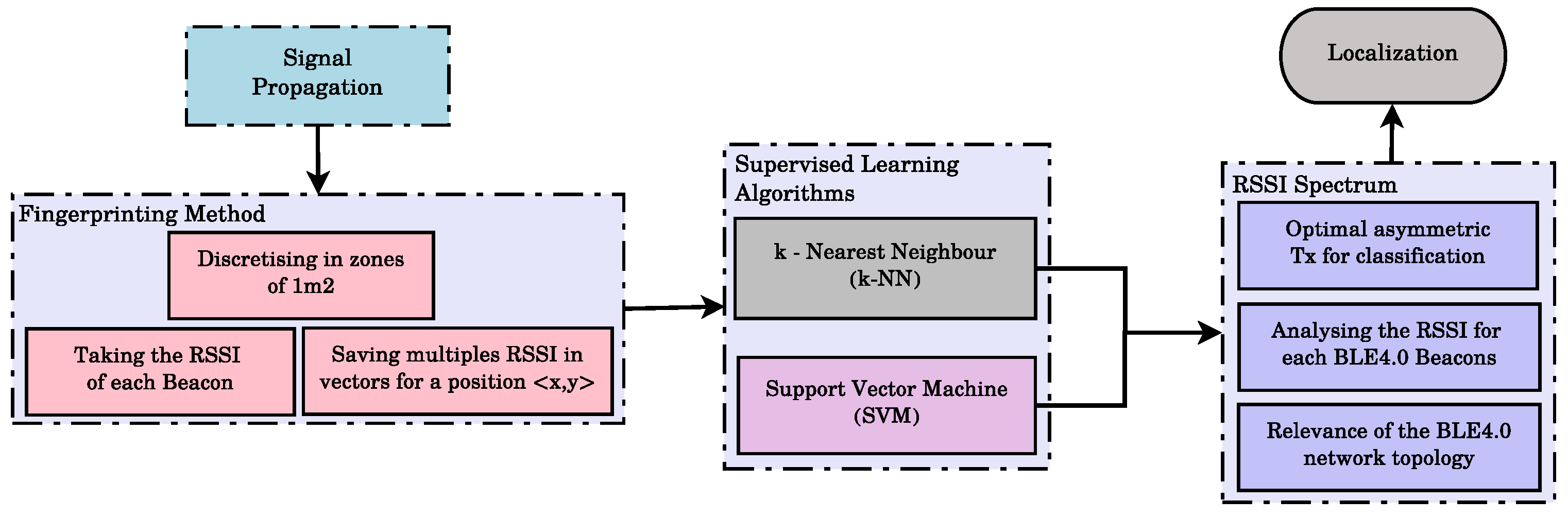
Figure 1.
Overall schema proposal.
Figure 1.
Overall schema proposal.
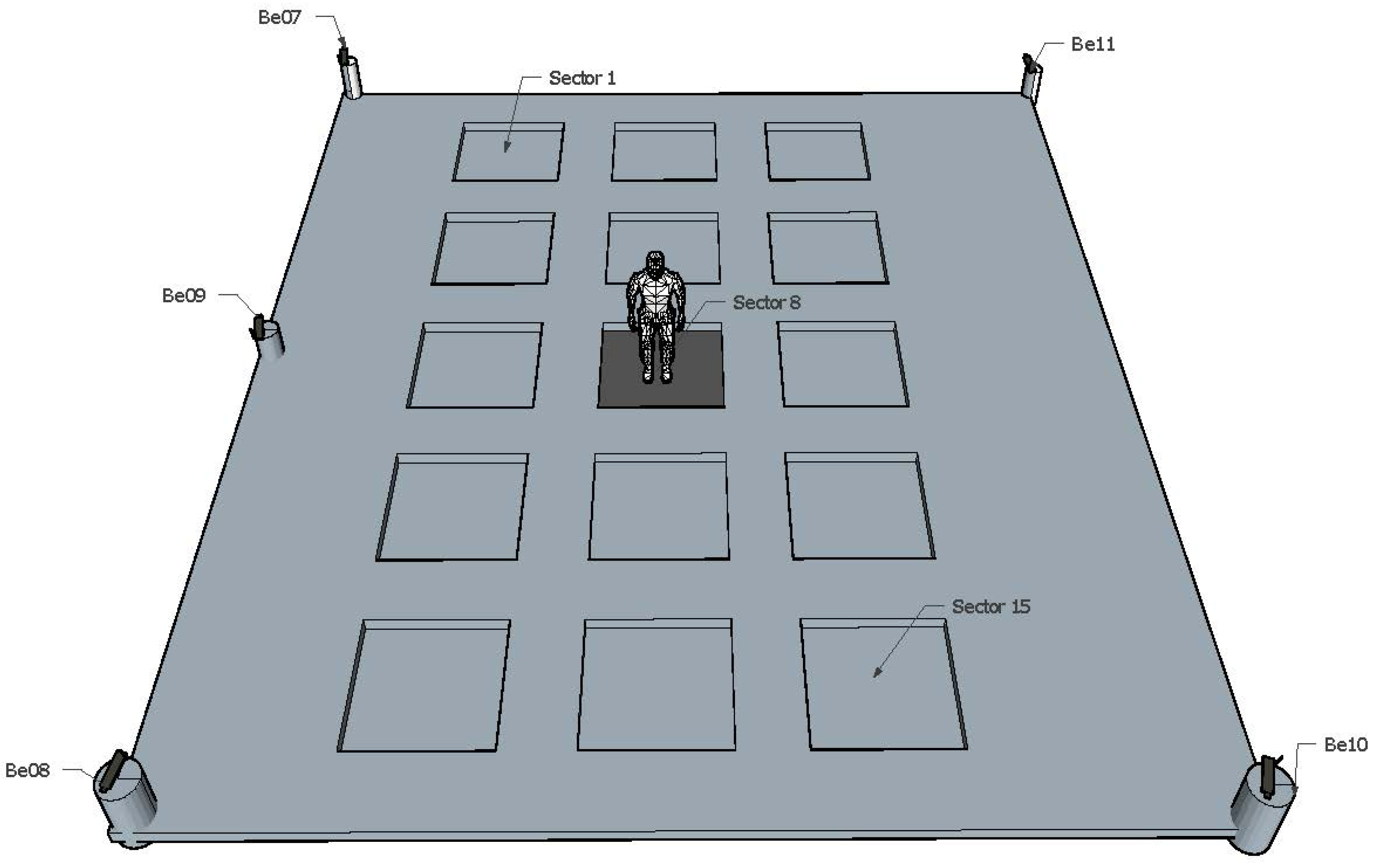
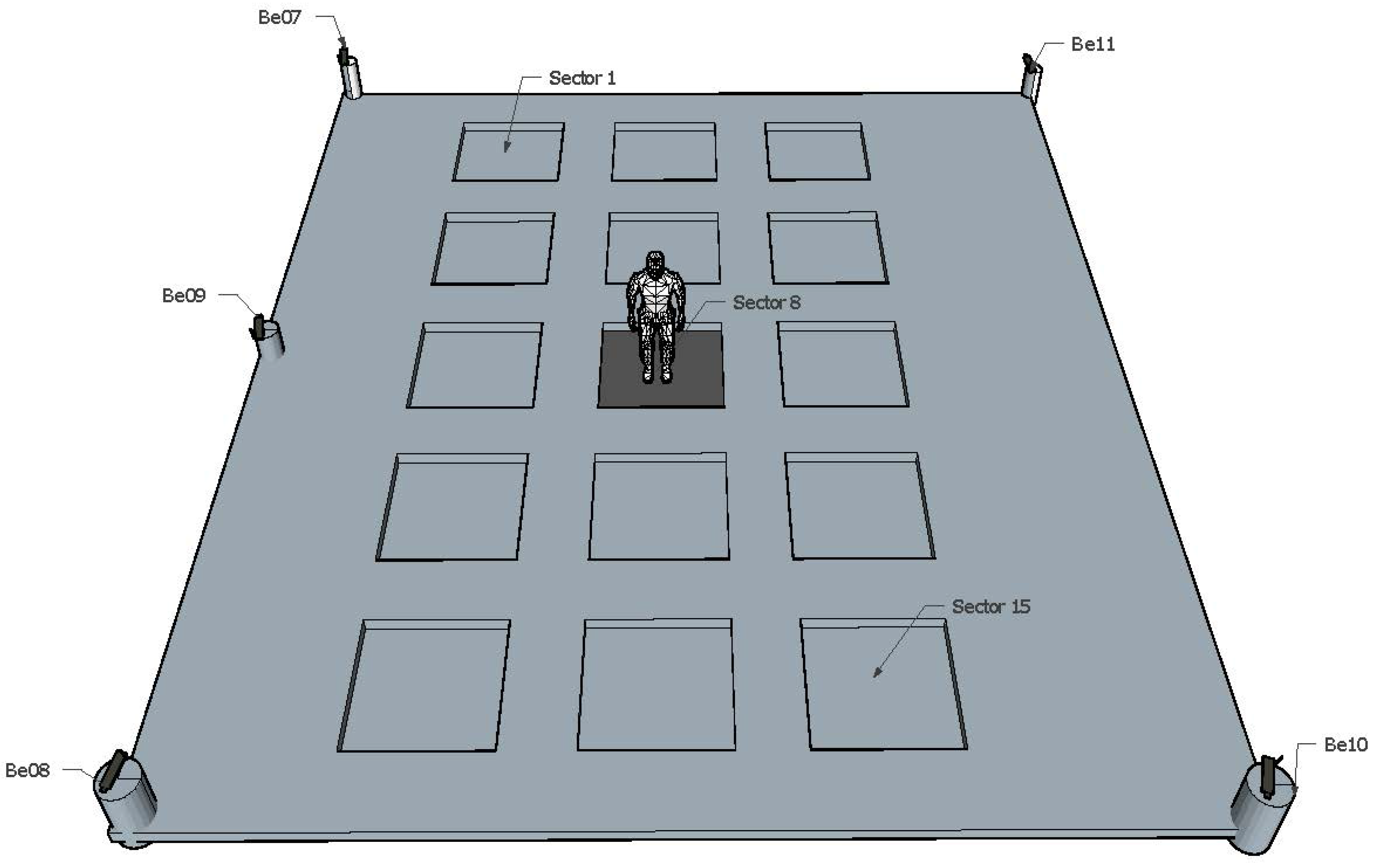
Figure 2.
BLE4.0 beacon indoor localization set-up.
Figure 2.
BLE4.0 beacon indoor localization set-up.
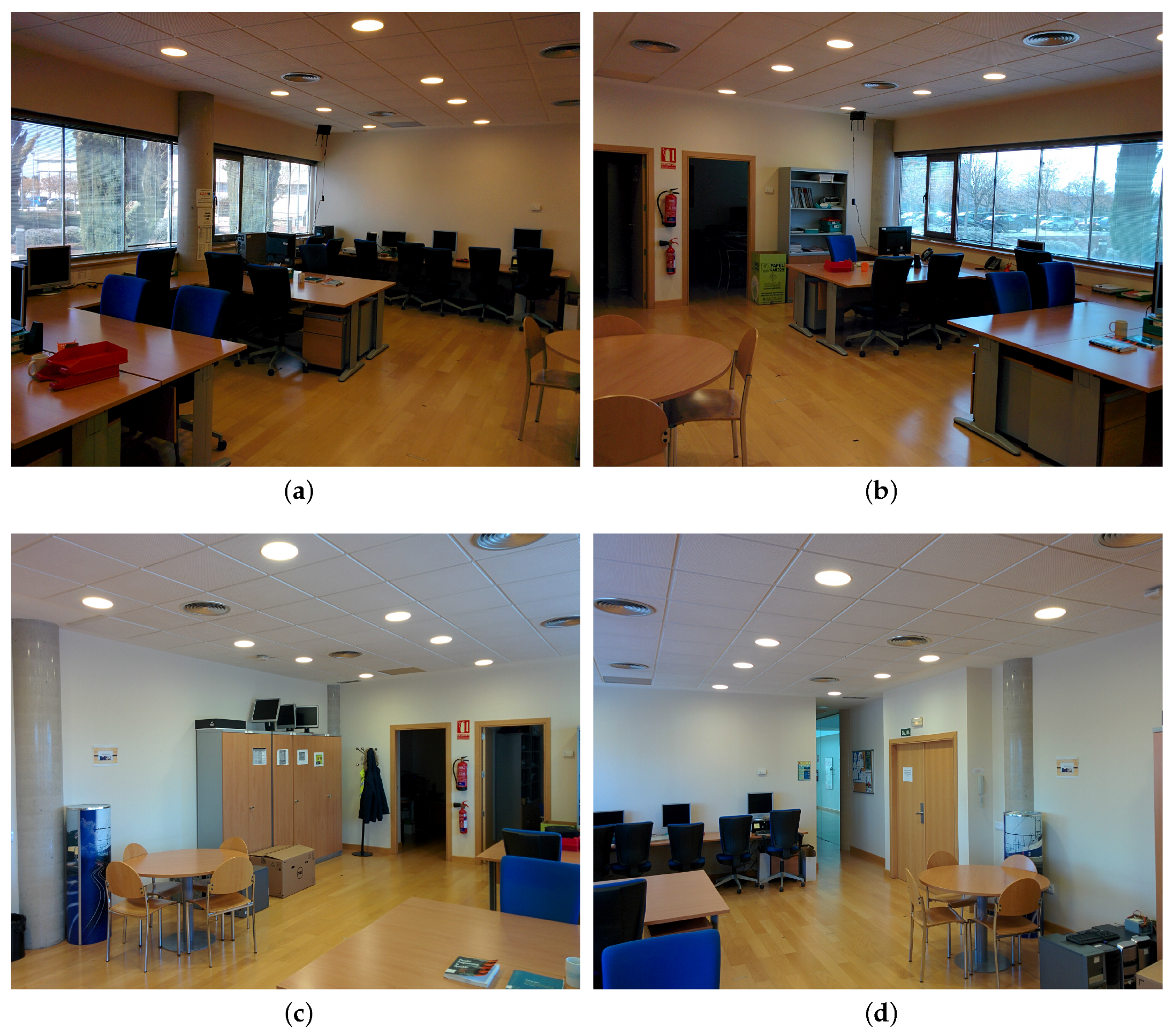
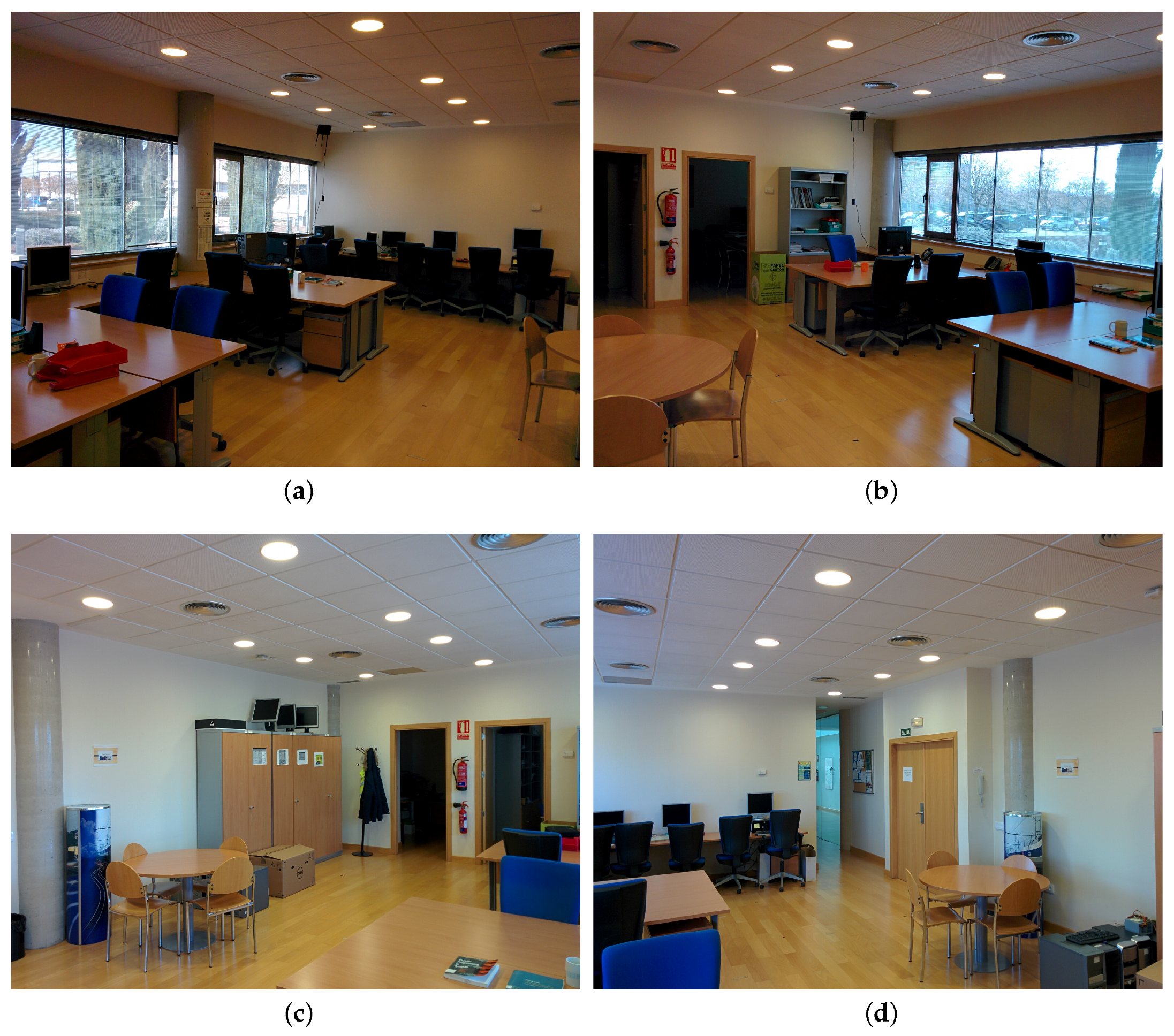
Figure 3.
Pictures from each one of the four corners of the lab. (a) from Be07; (b) from Be08; (c) from Be10; (d) from Be11.
Figure 3.
Pictures from each one of the four corners of the lab. (a) from Be07; (b) from Be08; (c) from Be10; (d) from Be11.
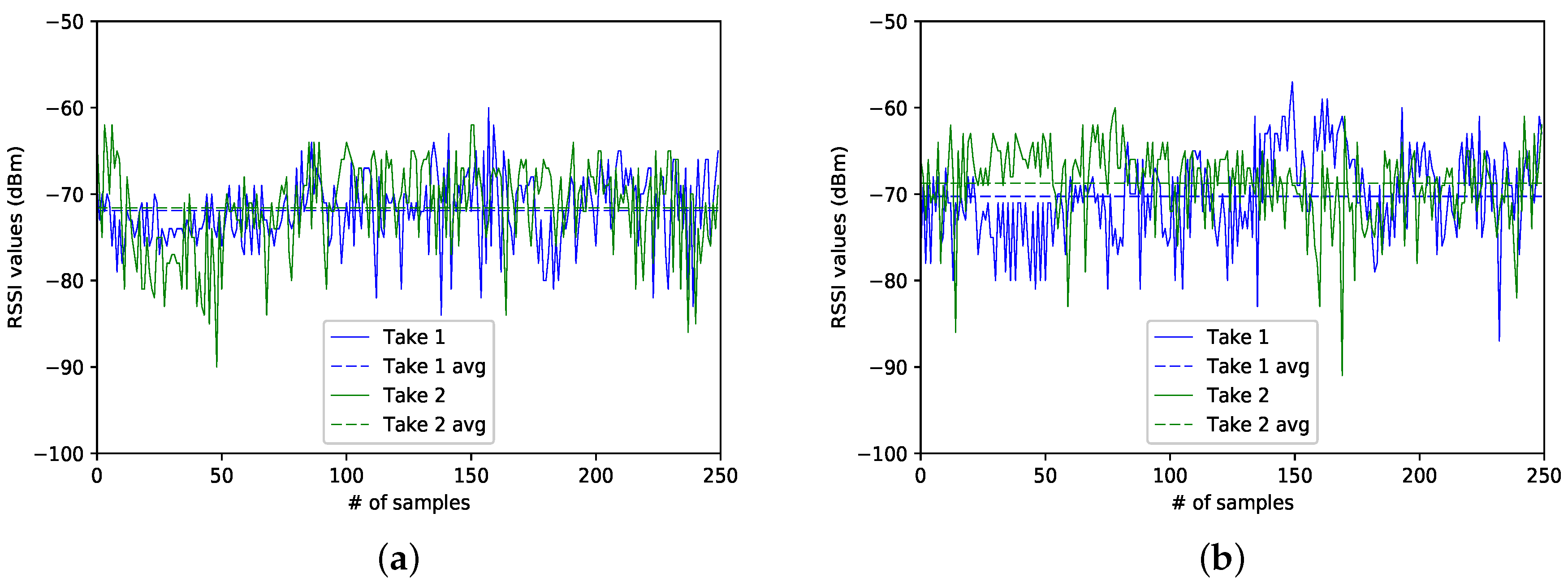
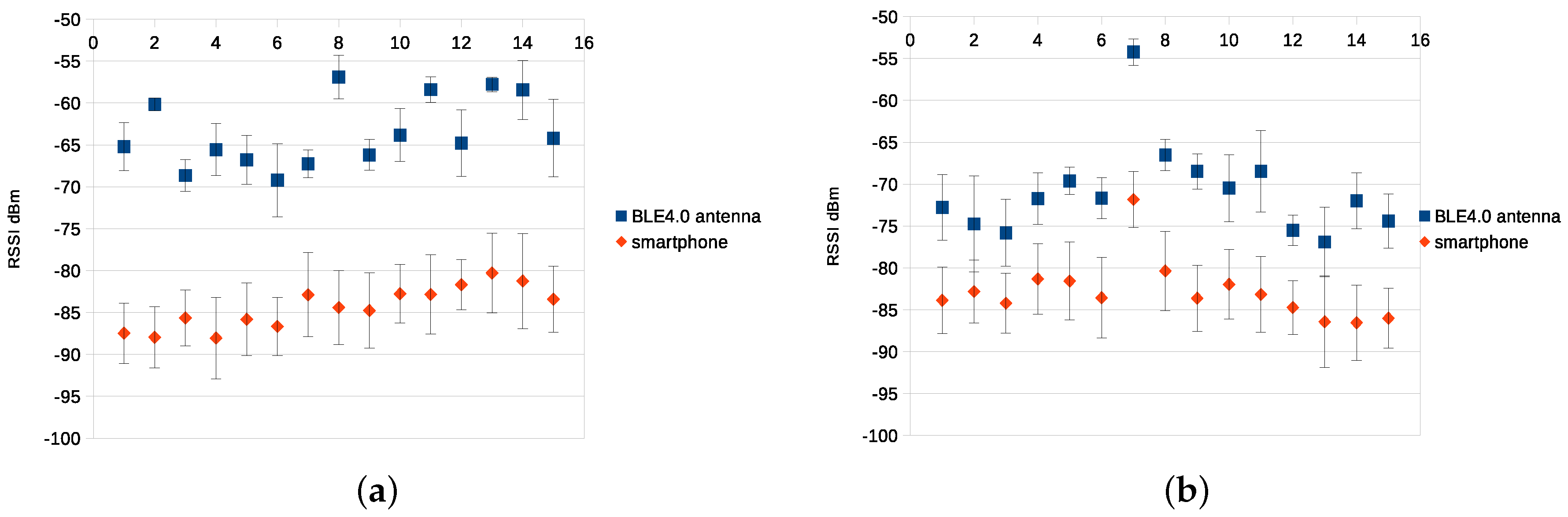
Figure 4.
RSSI (dBm) for BLE4.0 Antenna and smartphone with transmission power for each sector (1.15) of our environment. (a) for Be07; (b) for Be09.
Figure 4.
RSSI (dBm) for BLE4.0 Antenna and smartphone with transmission power for each sector (1.15) of our environment. (a) for Be07; (b) for Be09.
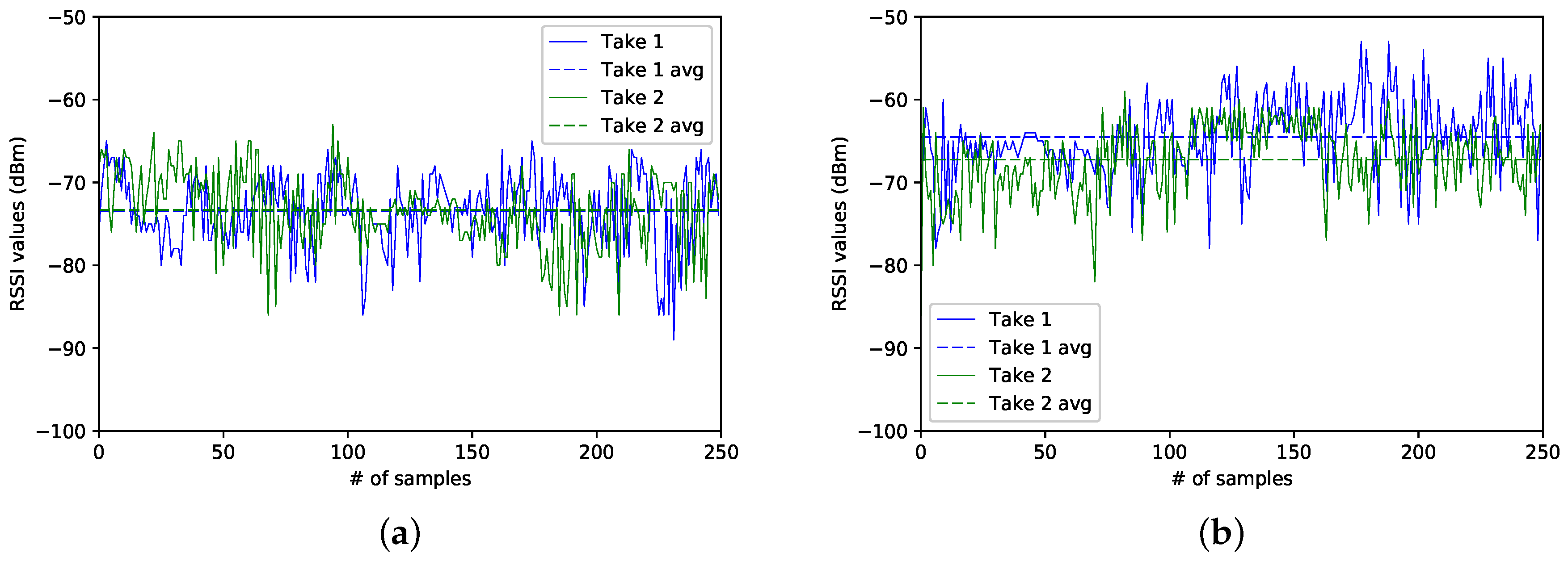
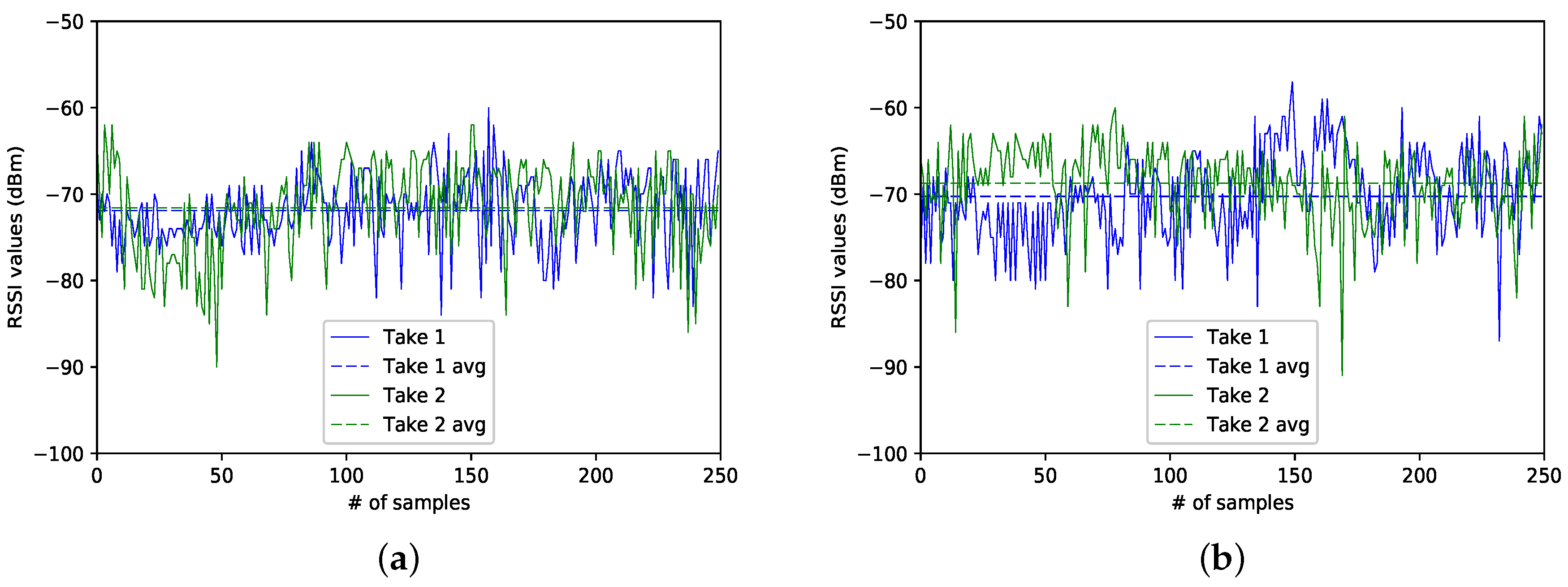
Figure 5.
Sector 8: Comparison of the RSSI from different BLE4.0 beacons for . (a) for Be07; (b) for Be10.
Figure 5.
Sector 8: Comparison of the RSSI from different BLE4.0 beacons for . (a) for Be07; (b) for Be10.
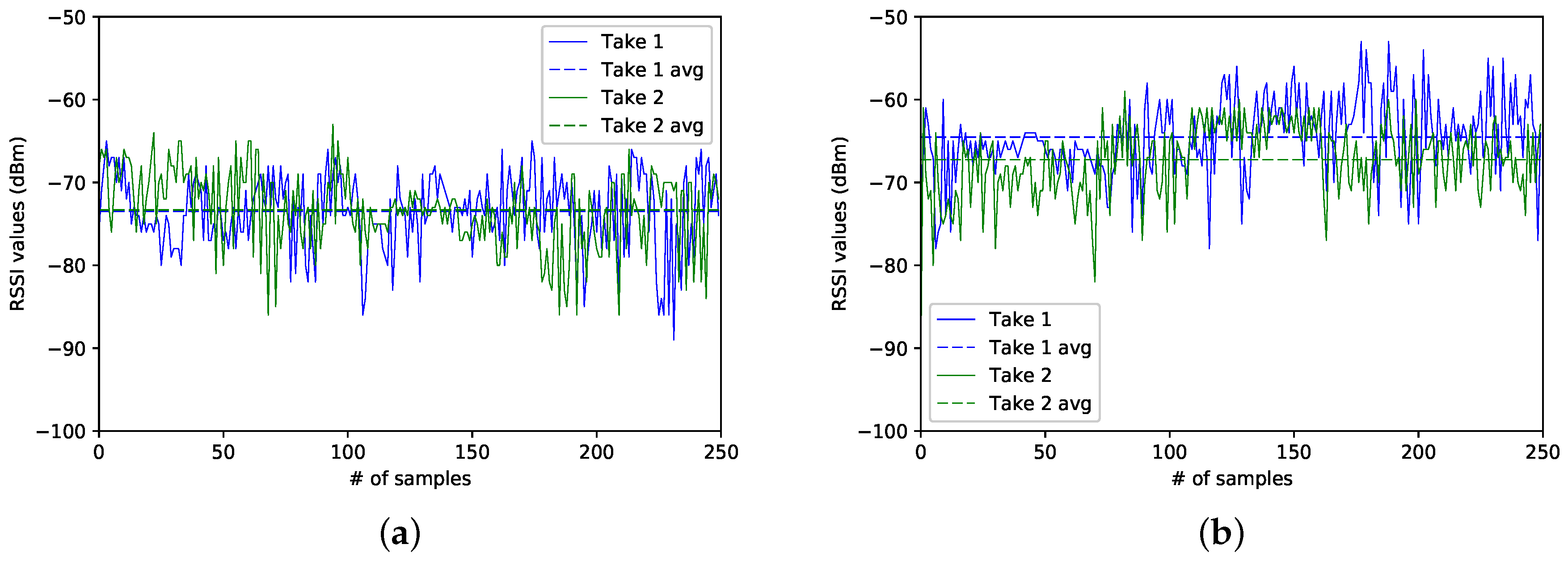
Figure 6.
Sector 4: Comparison of the RSSI from different BLE4.0 beacons for . (a) for Be07; (b) for Be10.
Figure 6.
Sector 4: Comparison of the RSSI from different BLE4.0 beacons for . (a) for Be07; (b) for Be10.
Figure 7.
Sector 15: Comparison of the RSSI from different BLE4.0 beacons for . (a) for Be07; (b) for Be10.
Figure 7.
Sector 15: Comparison of the RSSI from different BLE4.0 beacons for . (a) for Be07; (b) for Be10.
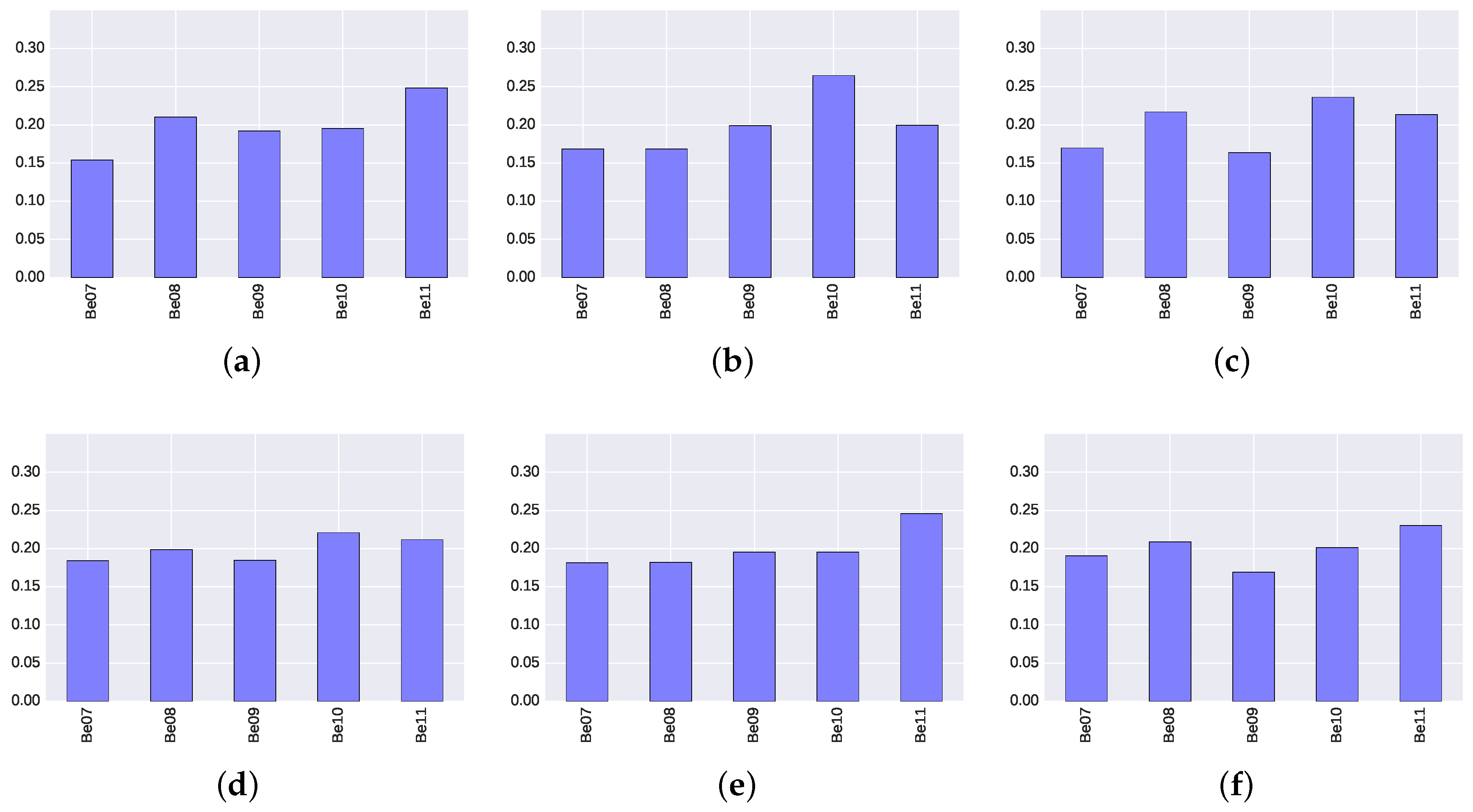
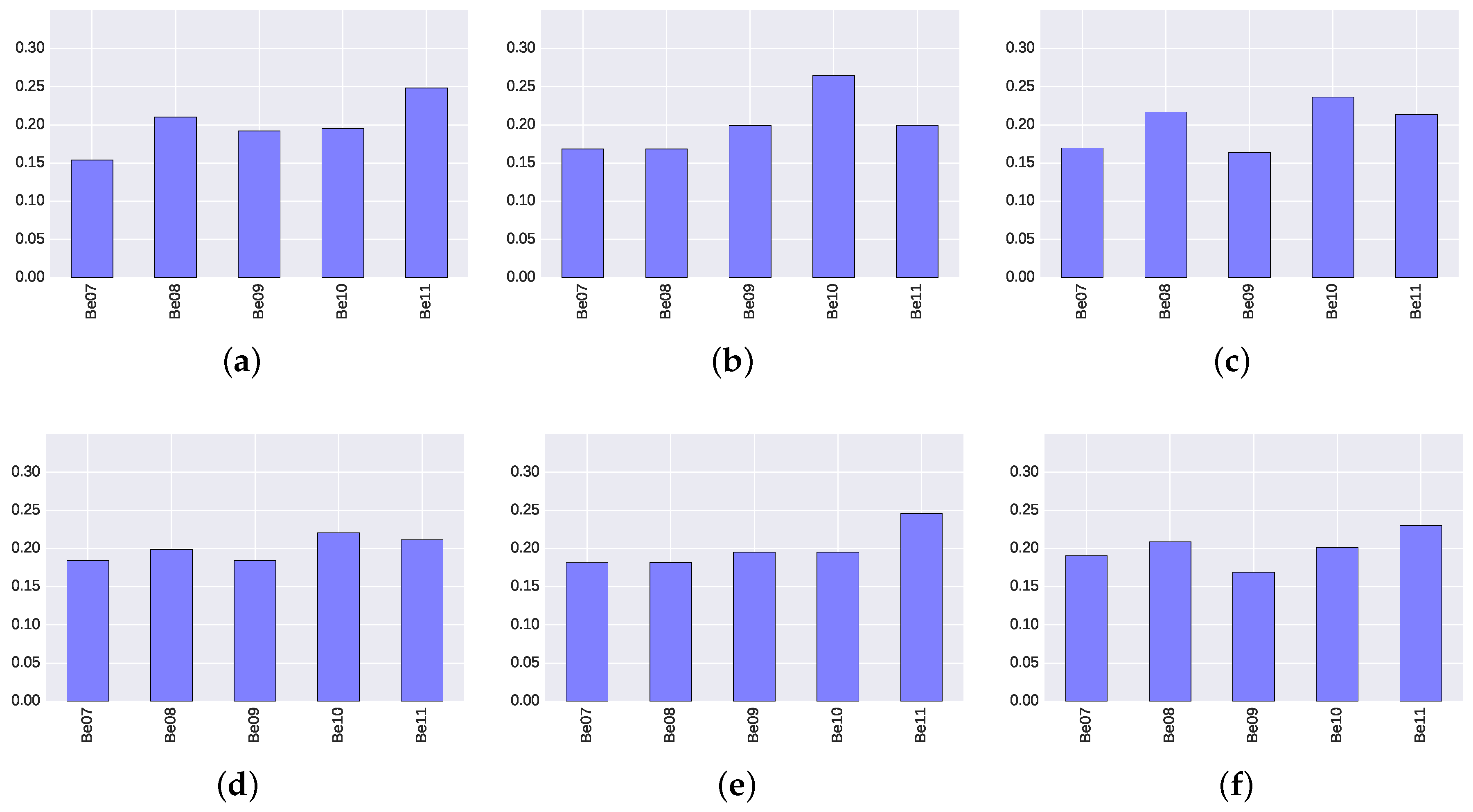
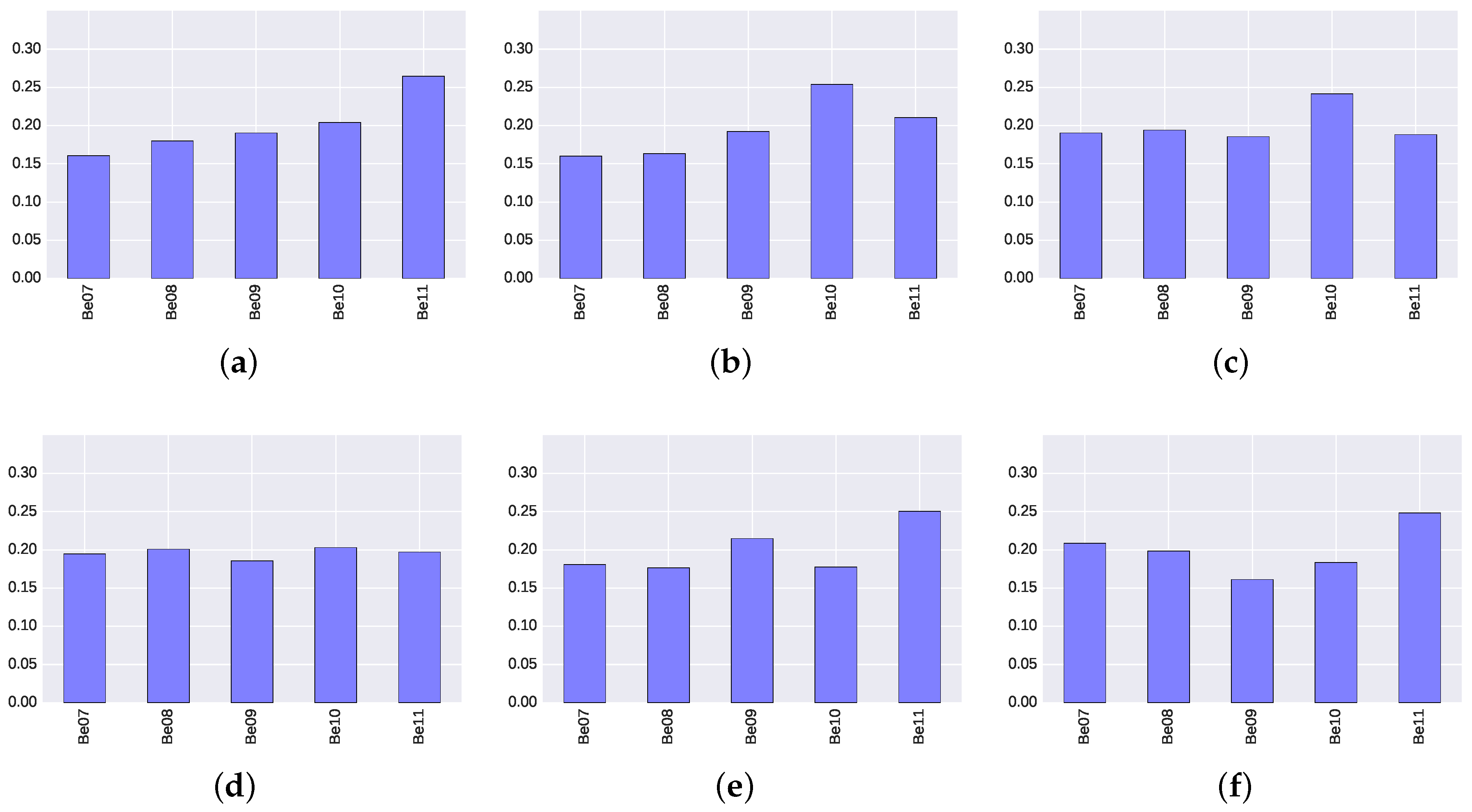
Figure 8.
Relevance score of each BLE4.0 beacon for ExtraTrees algorithm for different transmission power () levels. (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 8.
Relevance score of each BLE4.0 beacon for ExtraTrees algorithm for different transmission power () levels. (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
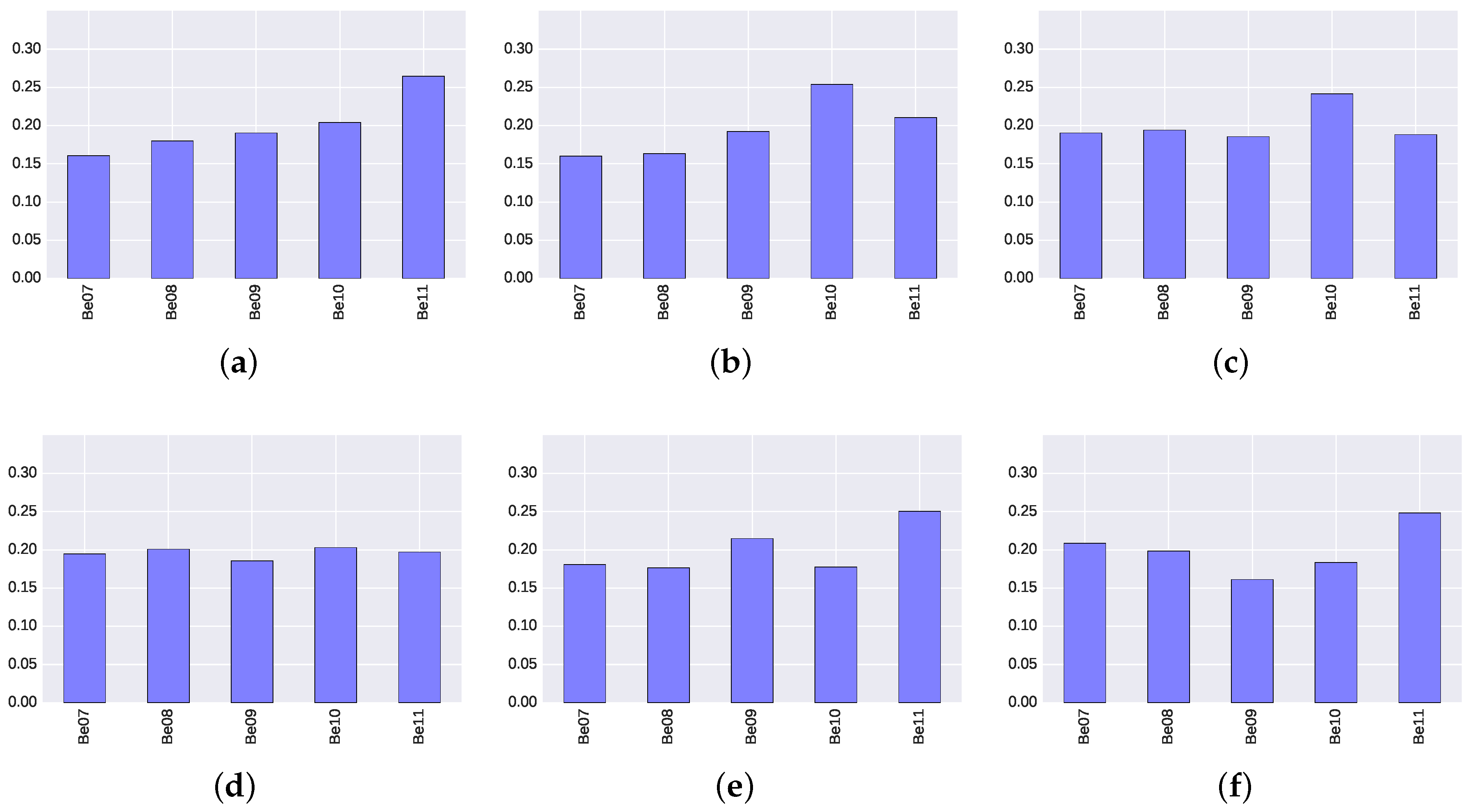
Figure 9.
Relevance score of each BLE4.0 beacon for Gradient Boosting Classifier algorithm for different transmission power () levels. (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 9.
Relevance score of each BLE4.0 beacon for Gradient Boosting Classifier algorithm for different transmission power () levels. (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
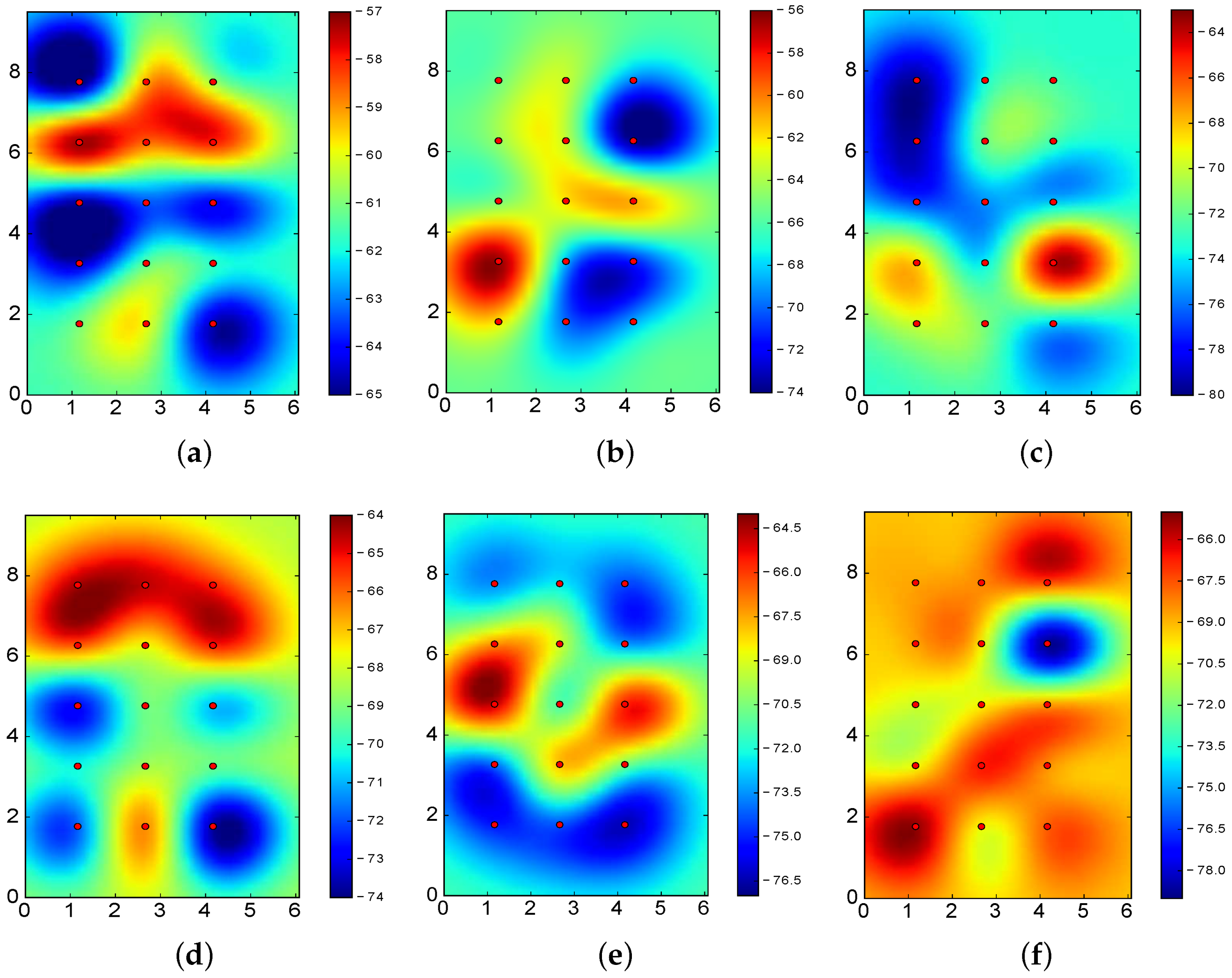
Figure 10.
RSSI values for the best (top) and worst (bottom) transmission power () level for BLE4.0 beacons ’Be07’, ’Be09’ and ’Be10’ throughout the area captured by the BLE4.0 antenna. (a) Be07 with ; (b) Be09 with ; (c) Be10 with ; (d) Be07 with ; (e) Be09 with ; (f) Be10 with .
Figure 10.
RSSI values for the best (top) and worst (bottom) transmission power () level for BLE4.0 beacons ’Be07’, ’Be09’ and ’Be10’ throughout the area captured by the BLE4.0 antenna. (a) Be07 with ; (b) Be09 with ; (c) Be10 with ; (d) Be07 with ; (e) Be09 with ; (f) Be10 with .
Figure 11.
RSSI values for different transmission power levels (Tx) for BLE4.0 beacons ’Be11’, ’Be07’ and ’Be08’. (a) ’Be11’ with ; (b) ’Be07’ with ; (c) ’Be08’ with ; (d) ’Be11’ with ; (e) ’Be07’ with ; (f) ’Be08’ with .
Figure 11.
RSSI values for different transmission power levels (Tx) for BLE4.0 beacons ’Be11’, ’Be07’ and ’Be08’. (a) ’Be11’ with ; (b) ’Be07’ with ; (c) ’Be08’ with ; (d) ’Be11’ with ; (e) ’Be07’ with ; (f) ’Be08’ with .
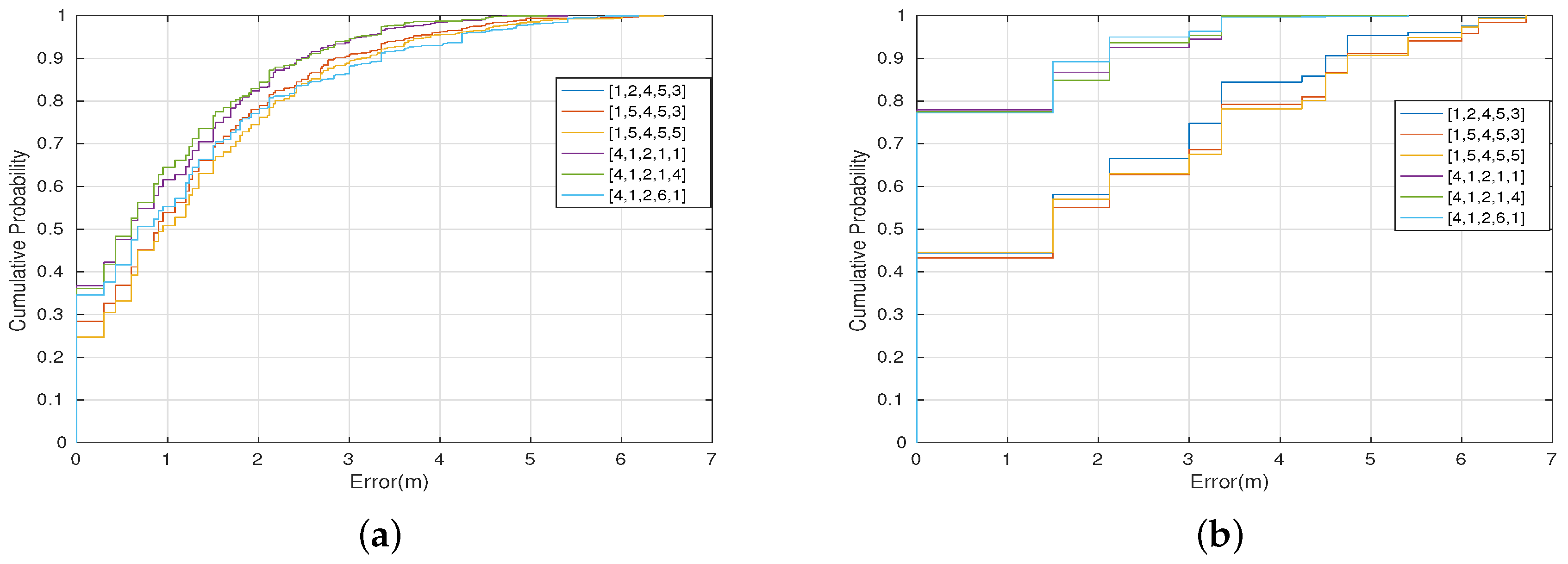
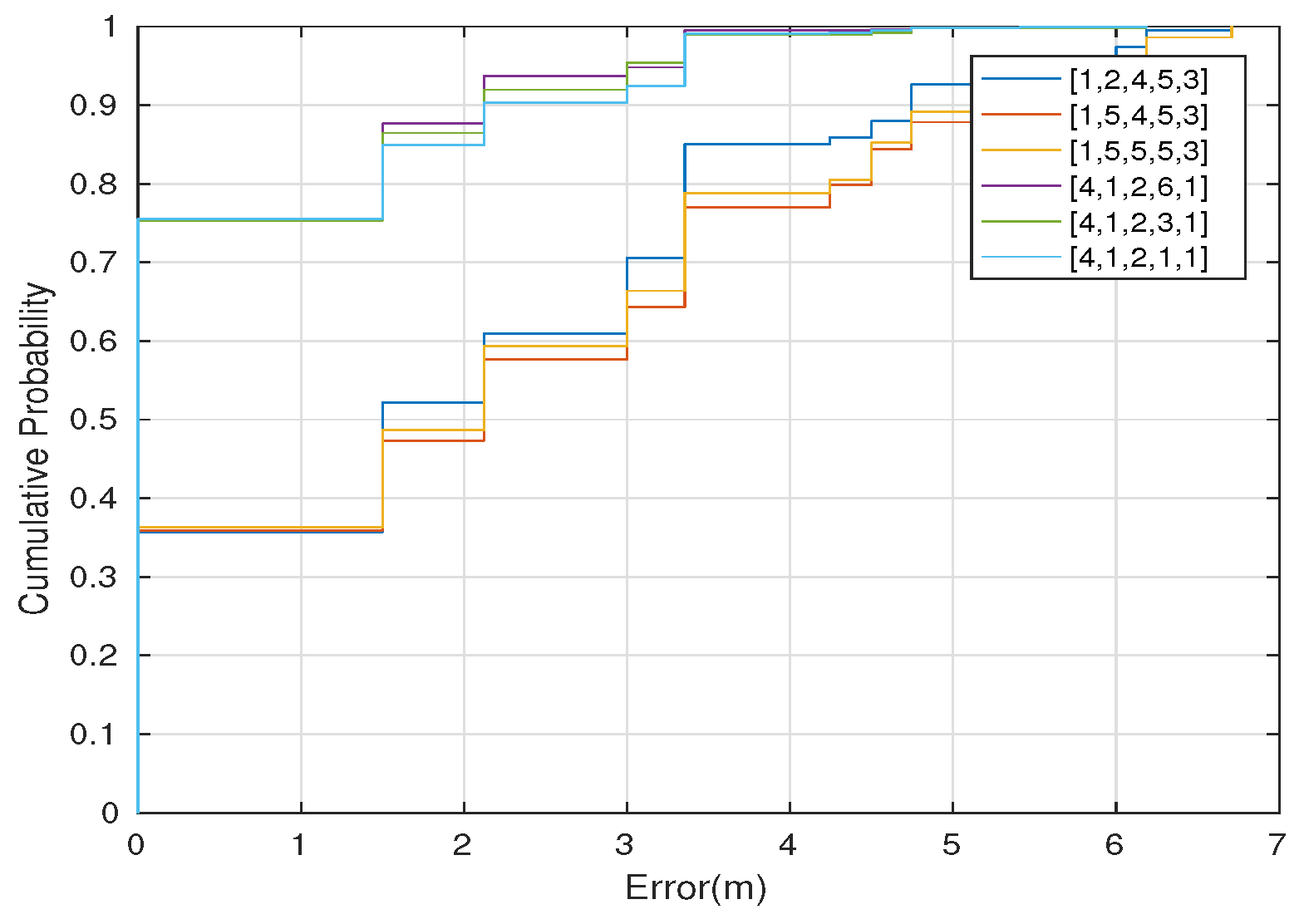
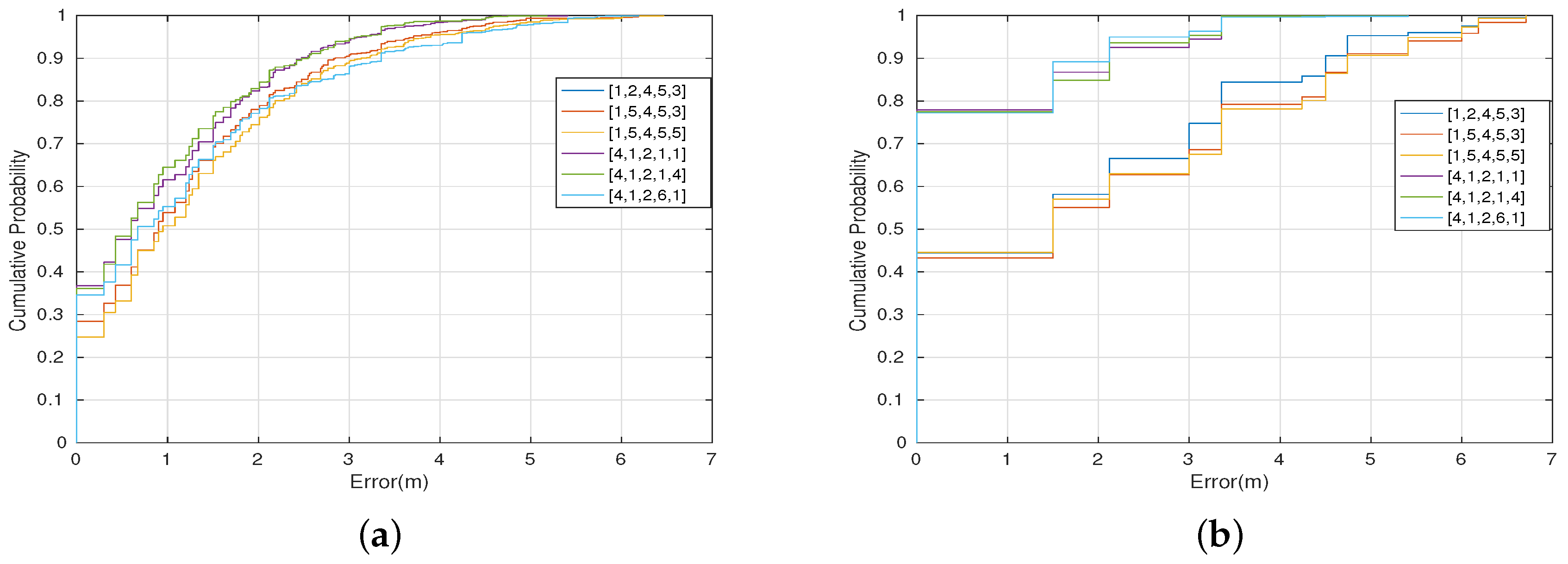
Figure 12.
Positioning error for k-NN (with k = 5) using (a) weighted distance; (b) mode. In both plots, the three best and the three worst combined transmission power for each BLE4.0 beacon are shown.
Figure 12.
Positioning error for k-NN (with k = 5) using (a) weighted distance; (b) mode. In both plots, the three best and the three worst combined transmission power for each BLE4.0 beacon are shown.
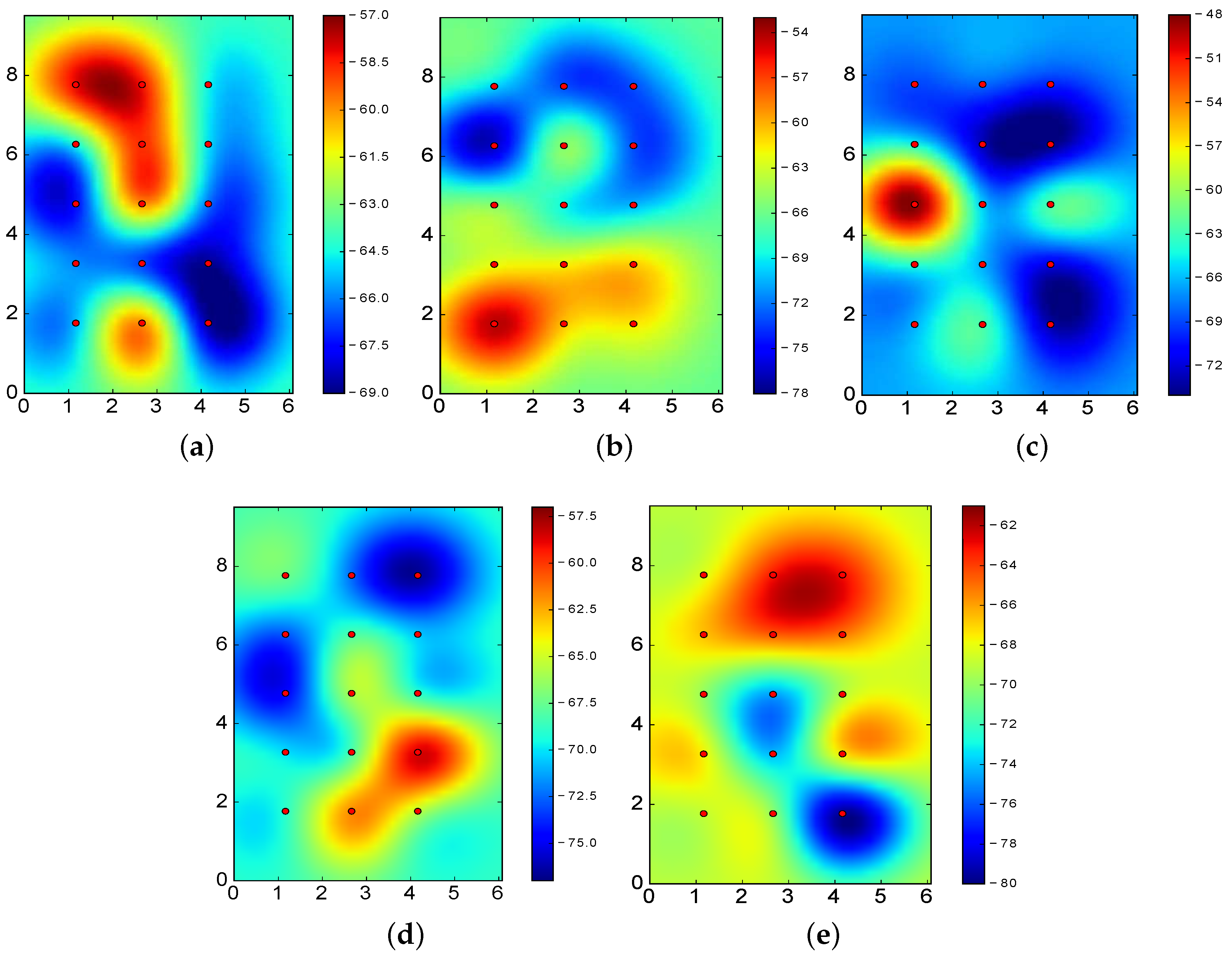
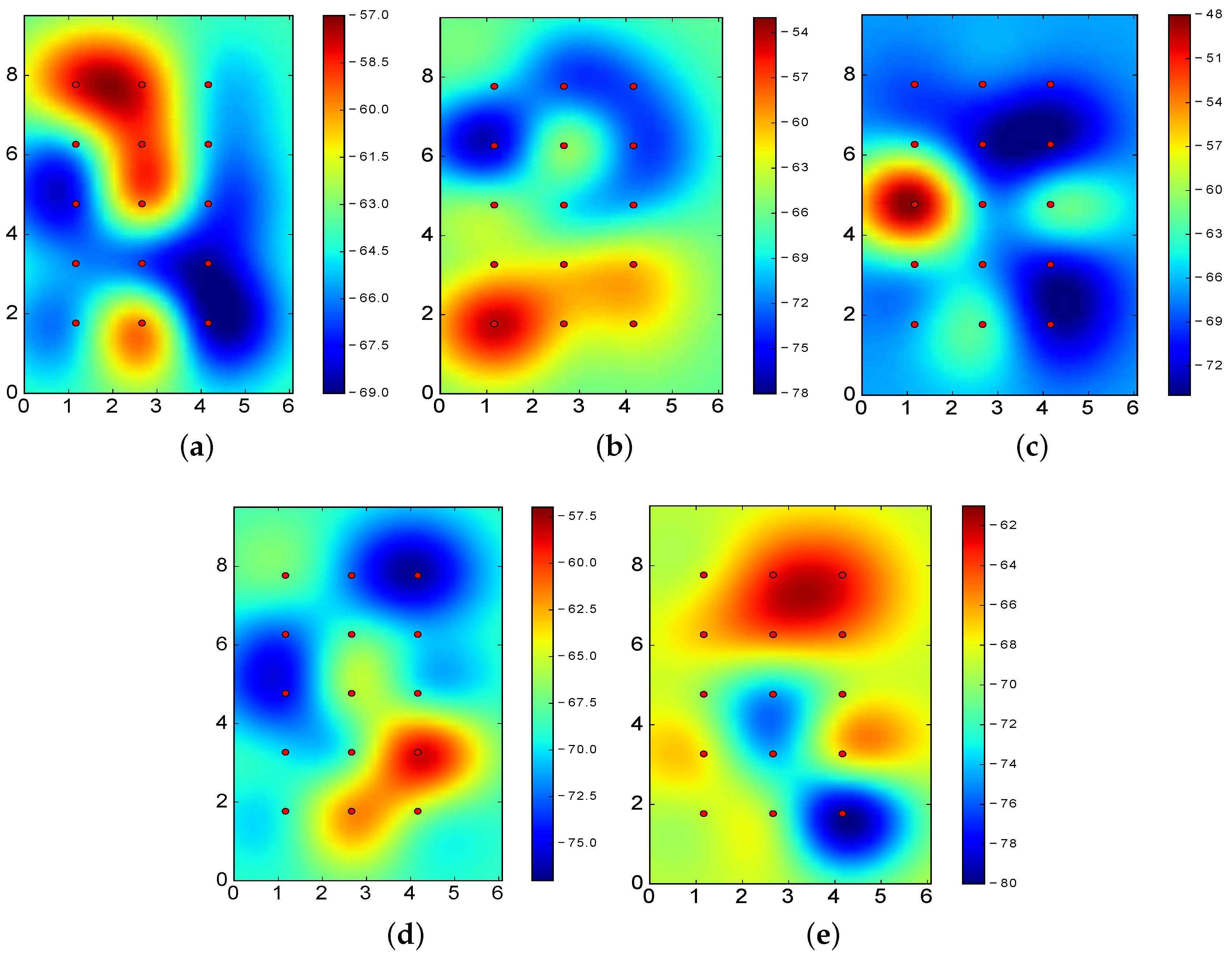
Figure 13.
RSSI values using the most relevant transmission power () level setting for each BLE4.0 beacon: [4,1,2,1,1]. (a) ’Be07’ with ; (b) ’Be08’ with ; (c) ’Be09’ with ; (d) ’Be10’ with ; (e) ’Be11’ with .
Figure 13.
RSSI values using the most relevant transmission power () level setting for each BLE4.0 beacon: [4,1,2,1,1]. (a) ’Be07’ with ; (b) ’Be08’ with ; (c) ’Be09’ with ; (d) ’Be10’ with ; (e) ’Be11’ with .
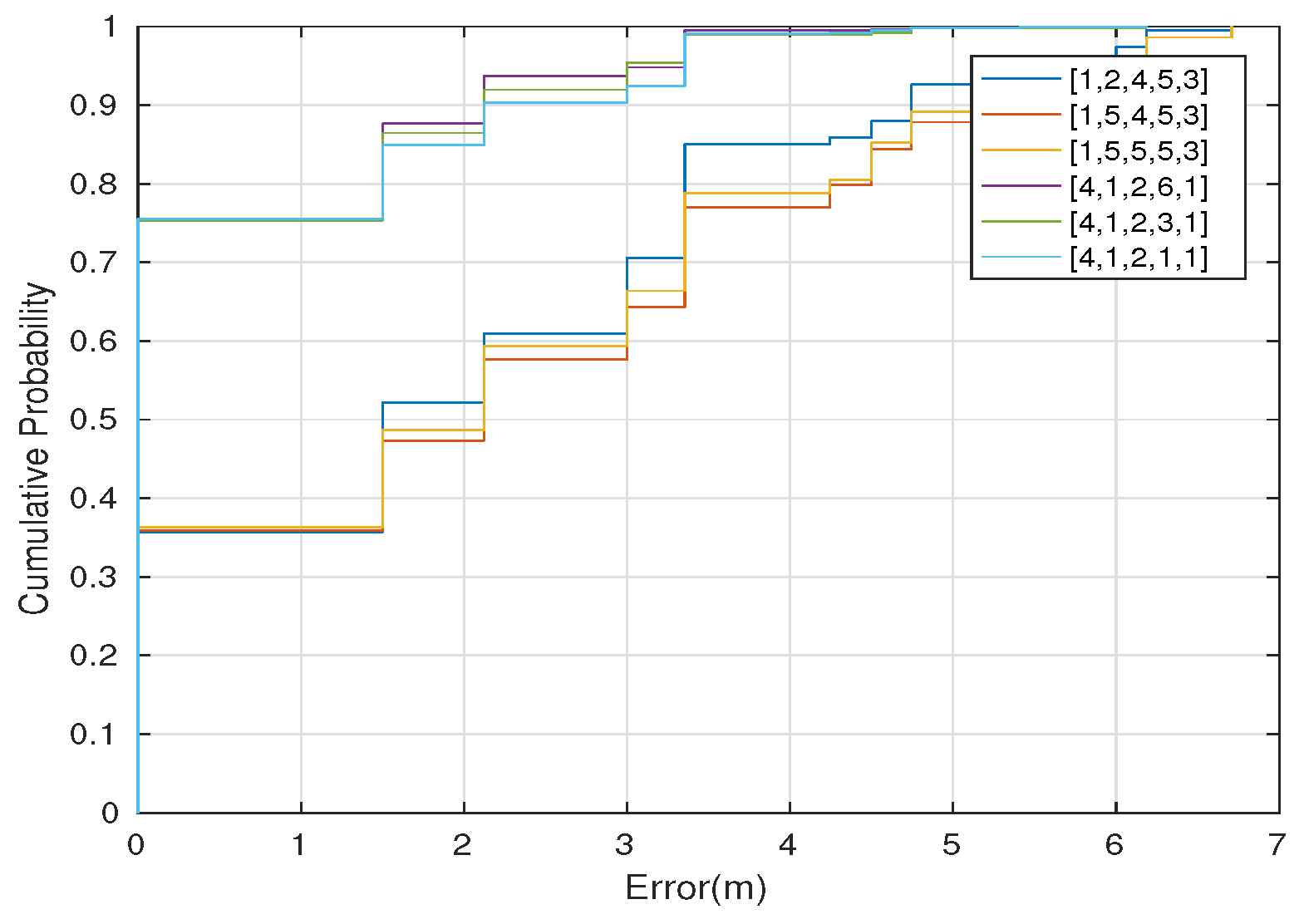
Figure 14.
Positioning error for SVM (with a quadratic polynomial kernel function). In both plots, the three best and the three worst combined transmission power for each BLE4.0 beacon are shown.
Figure 14.
Positioning error for SVM (with a quadratic polynomial kernel function). In both plots, the three best and the three worst combined transmission power for each BLE4.0 beacon are shown.
Table 1.
Global accuracy for k-NN using mode (with k = 5) and SVM (with a quadratic polynomial kernel function) algorithms for transmission power . Best results are shown in bold.
Table 1.
Global accuracy for k-NN using mode (with k = 5) and SVM (with a quadratic polynomial kernel function) algorithms for transmission power . Best results are shown in bold.
| Algorithm | Smartphone | BLE4.0 Antenna |
|---|
| k-NN | 21% | 64.6% |
| SVM | 22.4% | 60.6% |
Table 2.
Sample sizes of the RSSI captured using the BLE4.0 at various transmission power () levels.
Table 2.
Sample sizes of the RSSI captured using the BLE4.0 at various transmission power () levels.
| Transmission Power | Sample Size per BLE4.0 Beacon |
|---|
| 5003 |
| 5246 |
| 4844 |
| 5134 |
| 4697 |
| 4198 |
Table 3.
Global accuracy using BLE4.0 antenna for k-NN (with k = 5) using mode and SVM (with a quadratic polynomial kernel function) algorithms for different transmission power () levels. Best results are shown in bold.
Table 3.
Global accuracy using BLE4.0 antenna for k-NN (with k = 5) using mode and SVM (with a quadratic polynomial kernel function) algorithms for different transmission power () levels. Best results are shown in bold.
| Transmission Power | Algorithm |
|---|
| k-NN | SVM |
|---|
| 62.3% | 57.7% |
| 61.5% | 52.6% |
| 65.0% | 58.0% |
| 64.6% | 60.6% |
| 56.6% | 50.4% |
| 63.8% | 61.7% |
Table 4.
Local accuracy in each sector of our experimental area with the most relevant transmission power level for k-NN using mode (with k = 5). The centre shows the accuracy (in %) of each sector. Corners and middle-left hand are the position of BLE4.0 beacons with BeXY name. The most relevant transmission power level was [4,1,2,1,1].
Table 4.
Local accuracy in each sector of our experimental area with the most relevant transmission power level for k-NN using mode (with k = 5). The centre shows the accuracy (in %) of each sector. Corners and middle-left hand are the position of BLE4.0 beacons with BeXY name. The most relevant transmission power level was [4,1,2,1,1].
| Be07 | | Be11 |
| | 81.31 | 71.43 | 84.62 | |
| | 30.10 | 70.69 | 84.11 | |
| Be09 | 100.00 | 18.10 | 52.88 | |
| | 28.95 | 71.17 | 53.19 | |
| | 72.10 | 86.92 | 77.59 | |
| Be08 | | Be10 |
Table 5.
Local accuracy in each sector of our experimental area with the most relevant transmission power level for SVM (with a quadratic polynomial kernel function). The centre shows the accuracy (in %) of each sector. Corners and middle-left hand are the position of BLE4.0 beacons with BeXY name. The most relevant transmission power level was [4,1,2,1,1].
Table 5.
Local accuracy in each sector of our experimental area with the most relevant transmission power level for SVM (with a quadratic polynomial kernel function). The centre shows the accuracy (in %) of each sector. Corners and middle-left hand are the position of BLE4.0 beacons with BeXY name. The most relevant transmission power level was [4,1,2,1,1].
| Be07 | | Be11 |
| | 85.00 | 80.70 | 99.07 | |
| | 11.50 | 69.17 | 76.64 | |
| Be09 | 70.43 | 19.83 | 51.97 | |
| | 20.18 | 68.38 | 27.66 | |
| | 52.33 | 87.85 | 91.38 | |
| Be08 | | Be10 |
Table 6.
Cumulative positioning error with different transmission power () level settings for k-NN (with k = 5) using weighted distance (WD) and mode (MD); and SVM (with a quadratic polynomial kernel function). Best results are shown in bold.
Table 6.
Cumulative positioning error with different transmission power () level settings for k-NN (with k = 5) using weighted distance (WD) and mode (MD); and SVM (with a quadratic polynomial kernel function). Best results are shown in bold.
| Algorithm - Setting | Cumulative Positioning Error |
|---|
| 0 m | ≤1 m | ≤2 m | ≤3 m | ≤4 m |
|---|
| k-NN (WD) - [3,3,3,3,3] | 33.27% | 57.22% | 77.53% | 88.15% | 95.12% |
| k-NN (WD) - [4,1,2,1,1] | 36.15% | 64.47% | 82.92% | 94.03% | 98.70% |
| k-NN (MD) - [3,3,3,3,3] | 65.00% | 65.00% | 74.57% | 81.36% | 89.26% |
| k-NN (MD) - [4,1,2,1,1] | 77.89% | 77.89% | 86.74% | 92.52% | 99.68% |
| SVM - [6,6,6,6,6] | 61.70% | 61.70% | 72.81% | 77.22% | 88.40% |
| SVM - [4,1,2,1,1] | 75.57% | 75.57% | 84.92% | 90.33% | 99.12% |
Table 7.
Mean error for k-NN (with k = 5) using weighted distance (WD) and mode (MD); and SVM (with a quadratic polynomial kernel function) with the same and the most relevant transmission power level (). Best results are shown in bold.
Table 7.
Mean error for k-NN (with k = 5) using weighted distance (WD) and mode (MD); and SVM (with a quadratic polynomial kernel function) with the same and the most relevant transmission power level (). Best results are shown in bold.
| Algorithm - Setting | Mean Error (m) |
|---|
| k-NN (WD) - [3,3,3,3,3] | 1.16 |
| k-NN (WD) - [4,1,2,1,1] | 0.57 |
| k-NN (MD) - [3,3,3,3,3] | 1.11 |
| k-NN (MD) - [4,1,2,1,1] | 0.51 |
| SVM - [6,6,6,6,6] | 1.17 |
| SVM - [4,1,2,1,1] | 0.58 |
Table 8.
Accuracy results for the k-NN using mode (with k = 5) (right) and SVM localization (with a quadratic polynomial kernel function) (left) algorithms. Worst and best settings using different asymmetric transmission power settings, and the best symmetric transmission power level settings (shown in italic font). Best results are shown in bold.
Table 8.
Accuracy results for the k-NN using mode (with k = 5) (right) and SVM localization (with a quadratic polynomial kernel function) (left) algorithms. Worst and best settings using different asymmetric transmission power settings, and the best symmetric transmission power level settings (shown in italic font). Best results are shown in bold.
| SVM | k-NN |
|---|
| Setting | Accuracy | Setting | Accuracy |
|---|
| [1-2-4-5-3] | 35.70% | [1-5-4-5-3] | 43.23% |
| [1-5-4-5-3] | 35.91% | [1-2-4-5-3] | 44.48% |
| [1-5-5-5-3] | 36.28% | [1-5-4-5-5] | 44.53% |
| [1-5-5-2-3] | 36.69% | [1-3-4-5-3] | 44.54% |
| [1-2-4-2-3] | 36.73% | [1-3-4-2-3] | 44.58% |
| [2-2-2-2-2] | 52.68% | [5-5-5-5-5] | 56.70% |
| [5-5-5-5-5] | 50.41% | [2-2-2-2-2] | 61.50% |
| [1-1-1-1-1] | 57.74% | [1-1-1-1-1] | 62.10% |
| [3-3-3-3-3] | 57.90% | [6-6-6-6-6] | 63.80% |
| [4-4-4-4-4] | 60.70% | [4-4-4-4-4] | 64.70% |
| [6-6-6-6-6] | 61.70% | [3-3-3-3-3] | 65.00% |
| [4-1-2-3-2] | 73.86% | [3-1-2-1-1] | 75.96% |
| [4-1-4-1-1] | 74.29% | [4-1-2-3-4] | 76.87% |
| [4-1-2-6-1] | 75.36% | [4-1-2-6-1] | 77.23% |
| [4-1-2-3-1] | 75.36% | [4-1-2-1-4] | 77.45% |
| [4-1-2-1-1] | 75.57% | [4-1-2-1-1] | 77.89% |
Table 9.
Ranking of the transmission power values used by each BLE4.0 beacon for k-NN using mode (with k = 5) results.
Table 9.
Ranking of the transmission power values used by each BLE4.0 beacon for k-NN using mode (with k = 5) results.
| BLE4.0 Beacon | Ranking |
|---|
| Be07 | 3.7% |
| Be08 | 0.9% |
| Be09 | 0.5% |
| Be10 | 5.0% |
| Be11 | 2.5% |


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}