
A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification


Abstract
:1. Introduction
- (1)
- The use of a modified PSM algorithm in orientation estimation and selecting the ideal plane for the scan matching algorithm with application to robust 3D mapping.
- (2)
- Presentation of a novel approach for real-time pipeline classification in the generated indoor map using a histogram-based radius estimation.
2. Related Work
2.1. Scan Matching Methods for SLAM
2.2. Indoor UAV Navigation
2.3. Applications in Plant Engineering
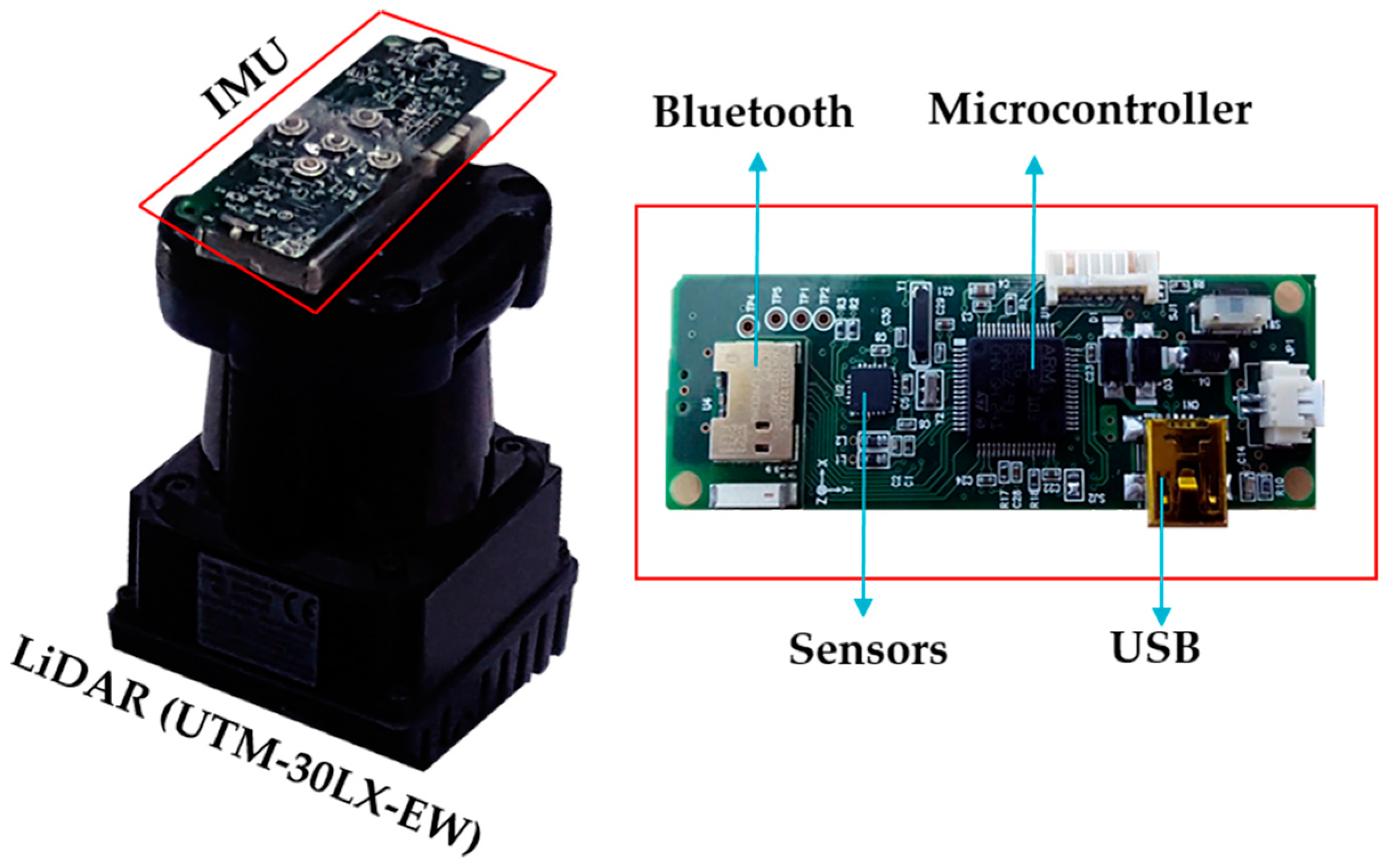
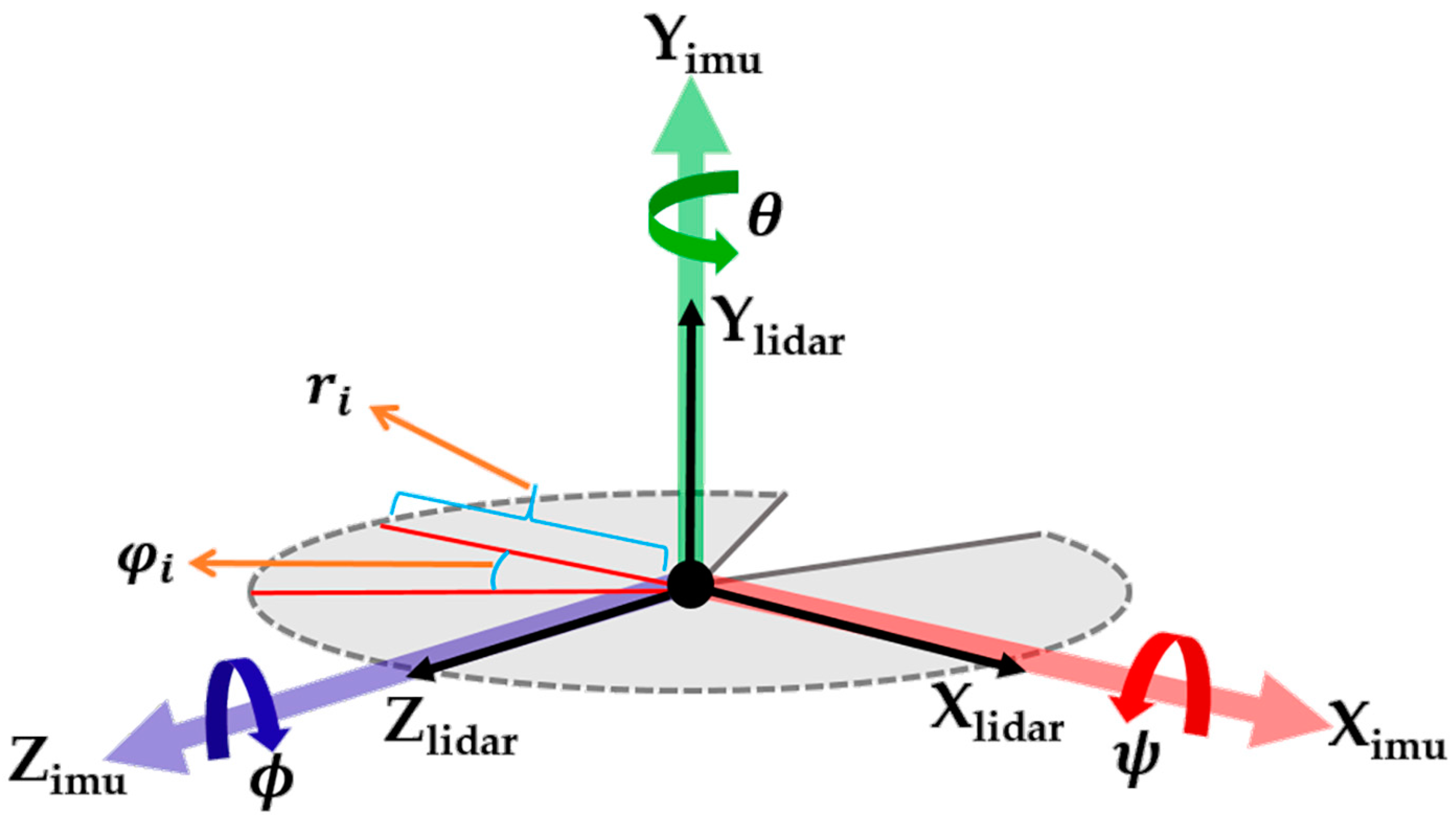
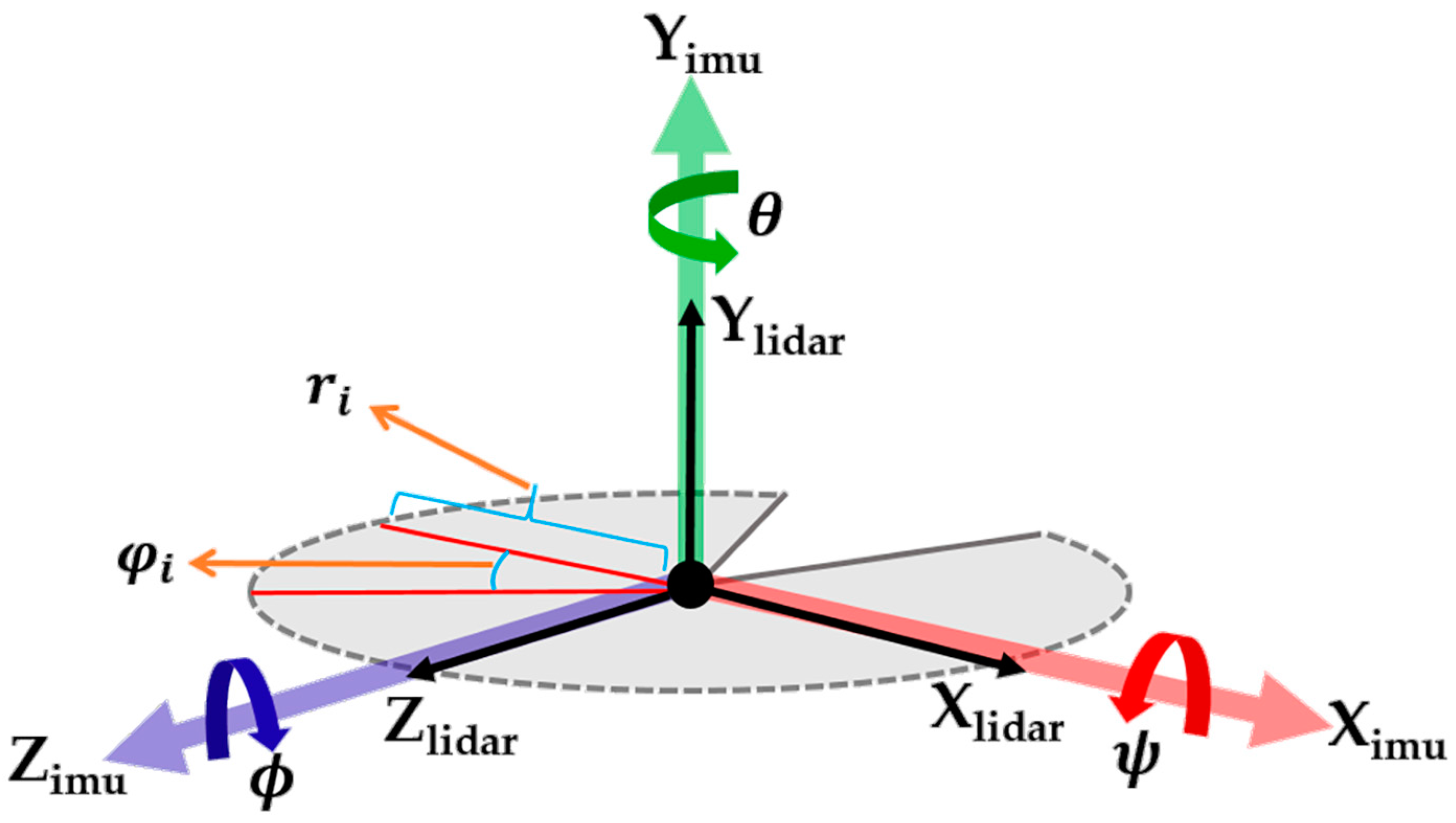
3. LiDAR and IMU Integrated Navigation
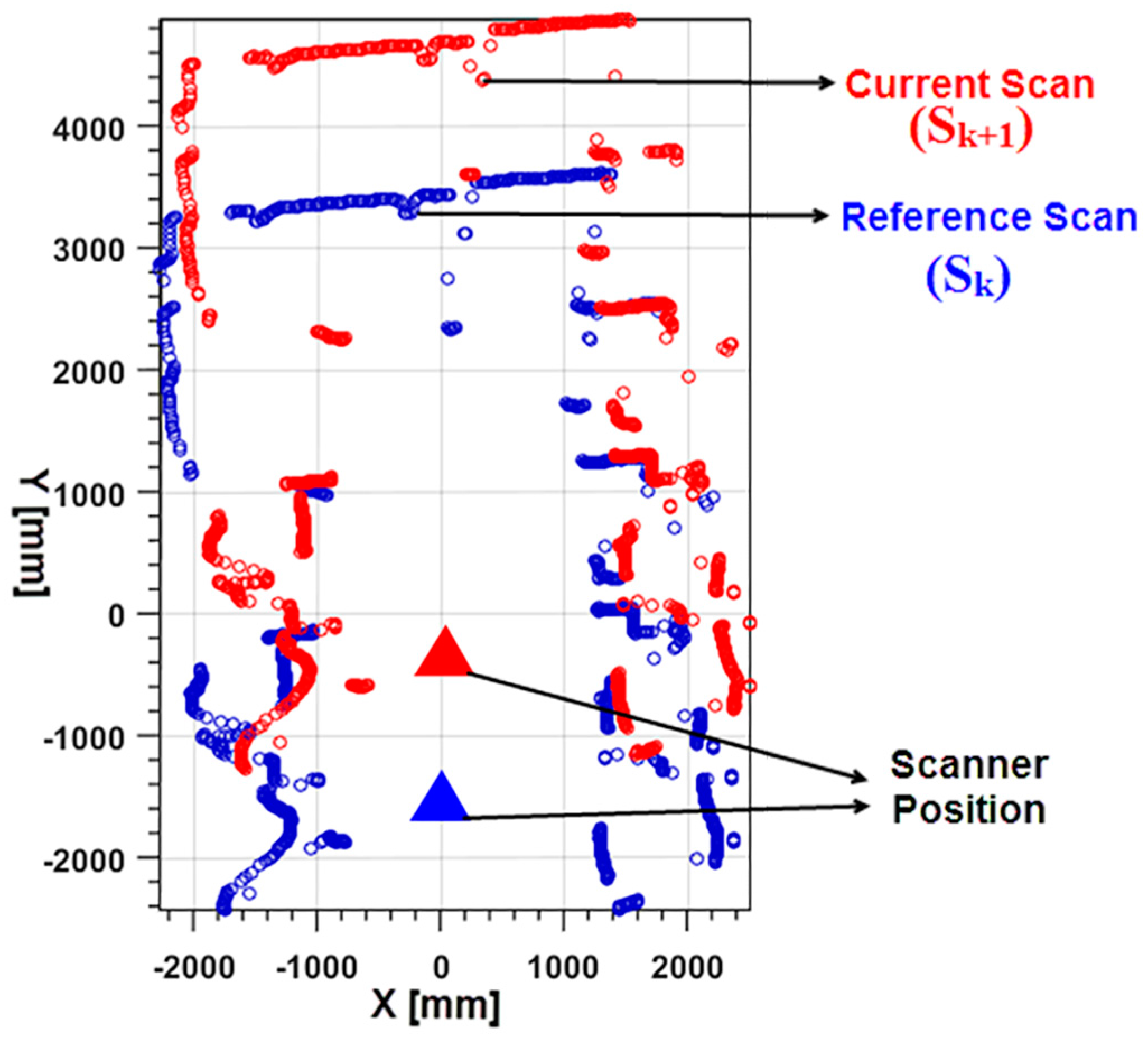
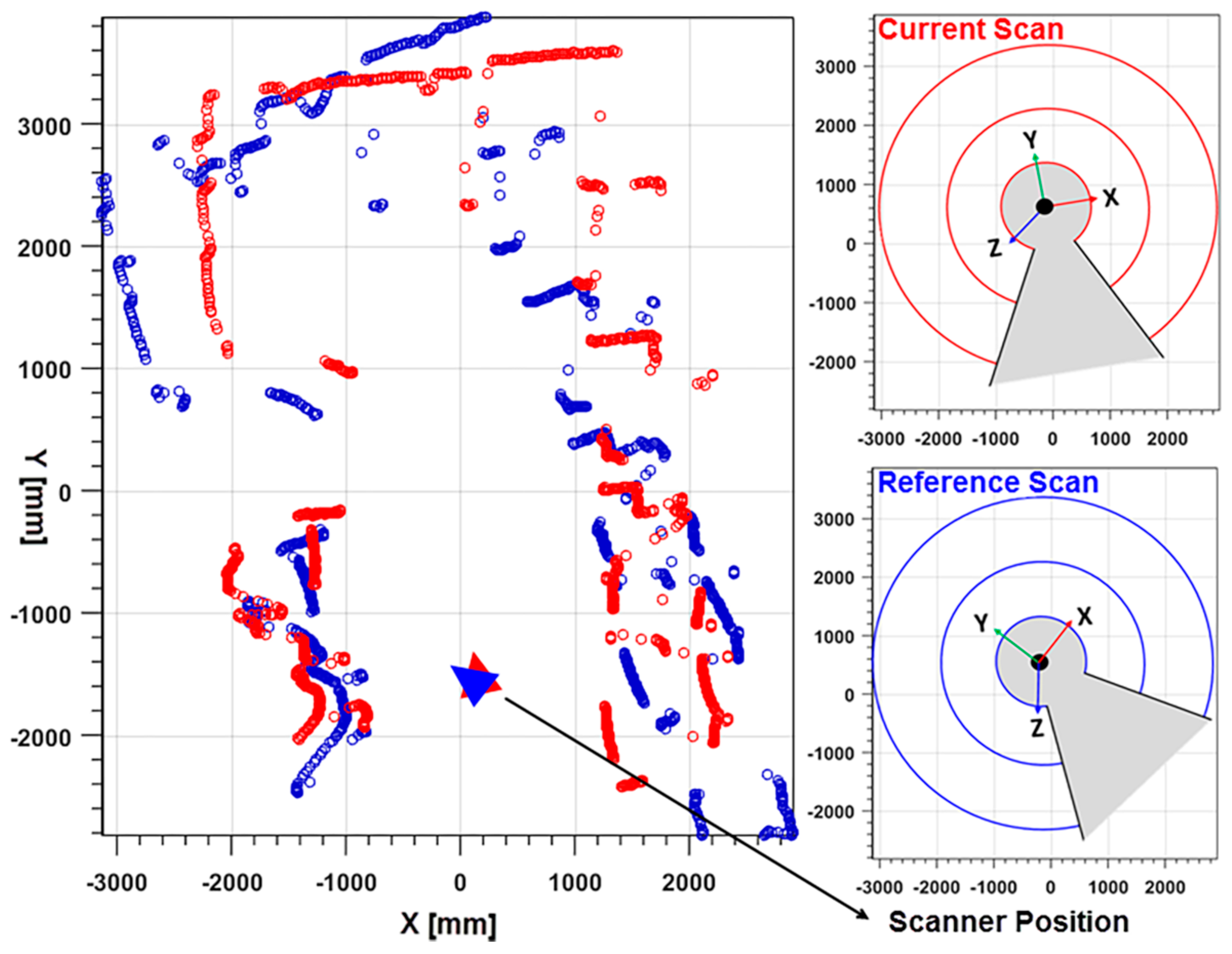
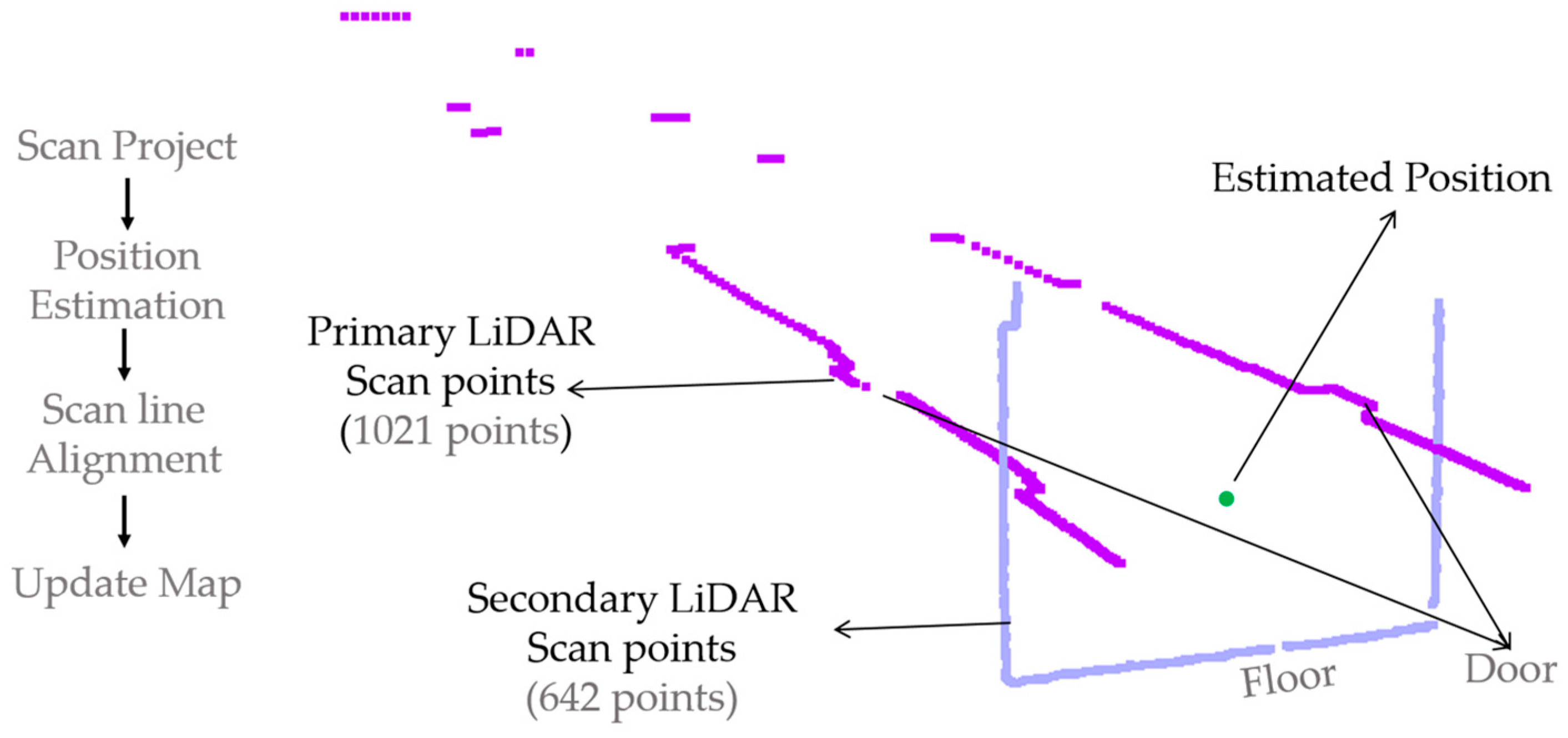
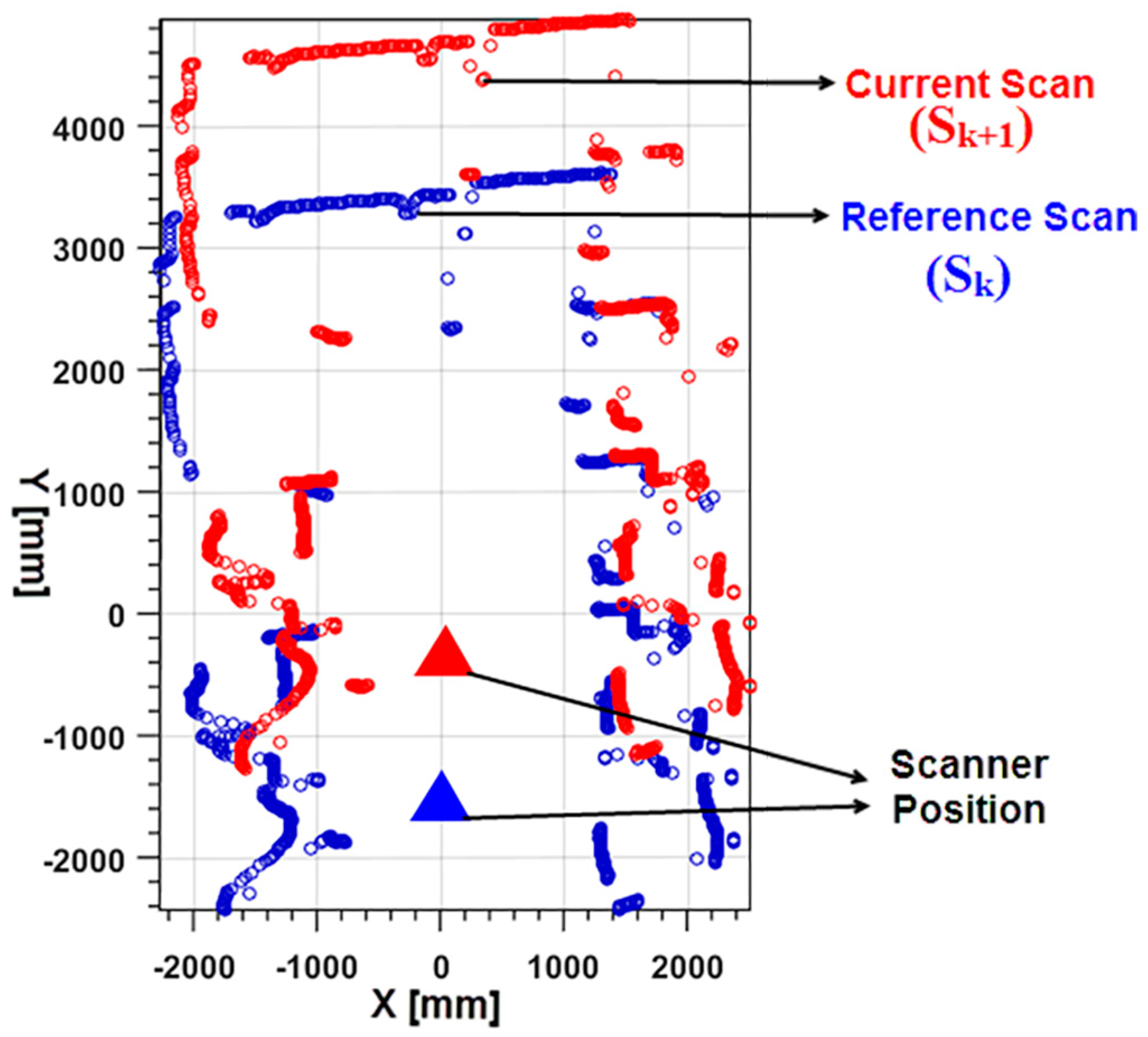
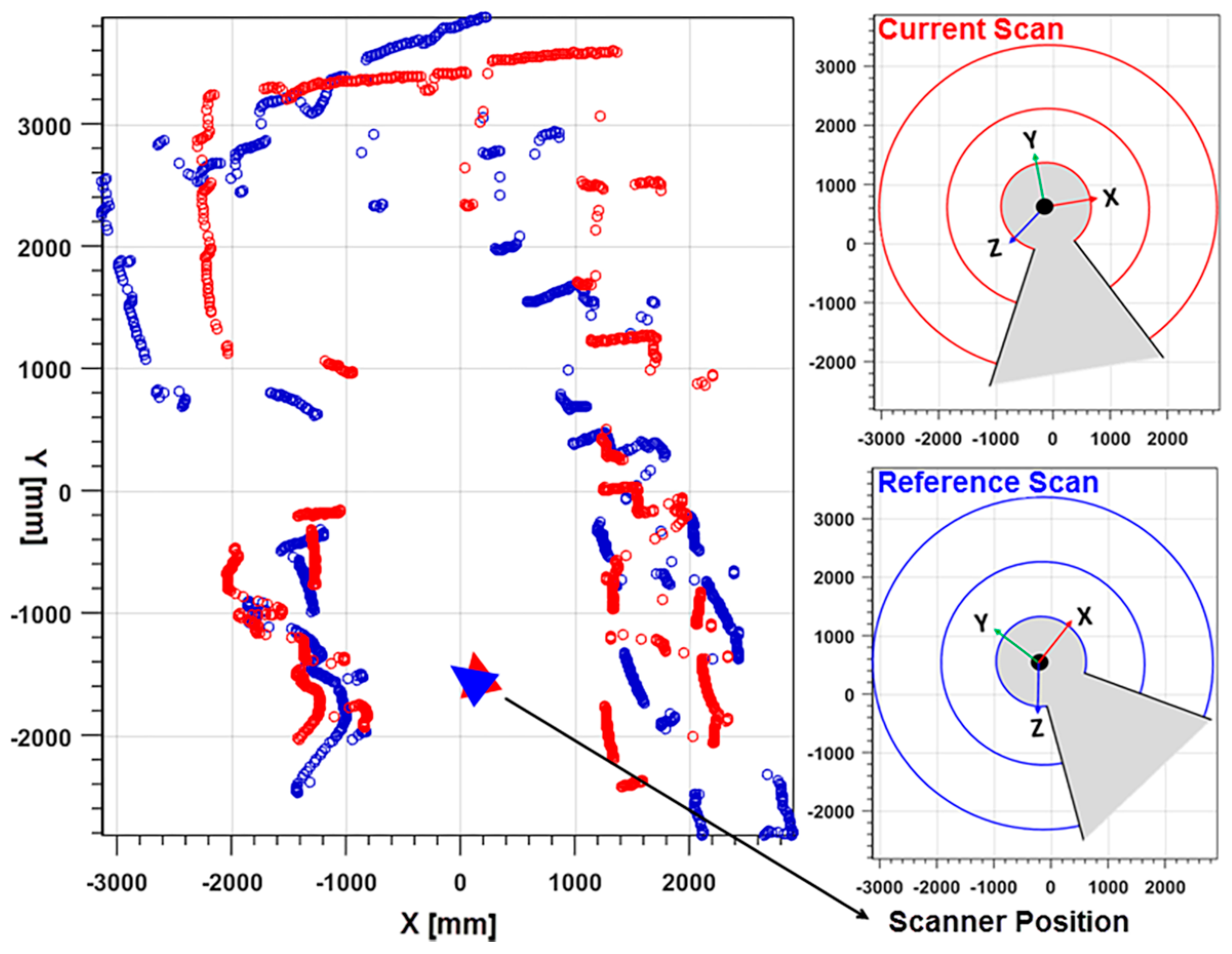
3.1. Point-to-Point Scan Matching
3.1.1. Orientation Estimation
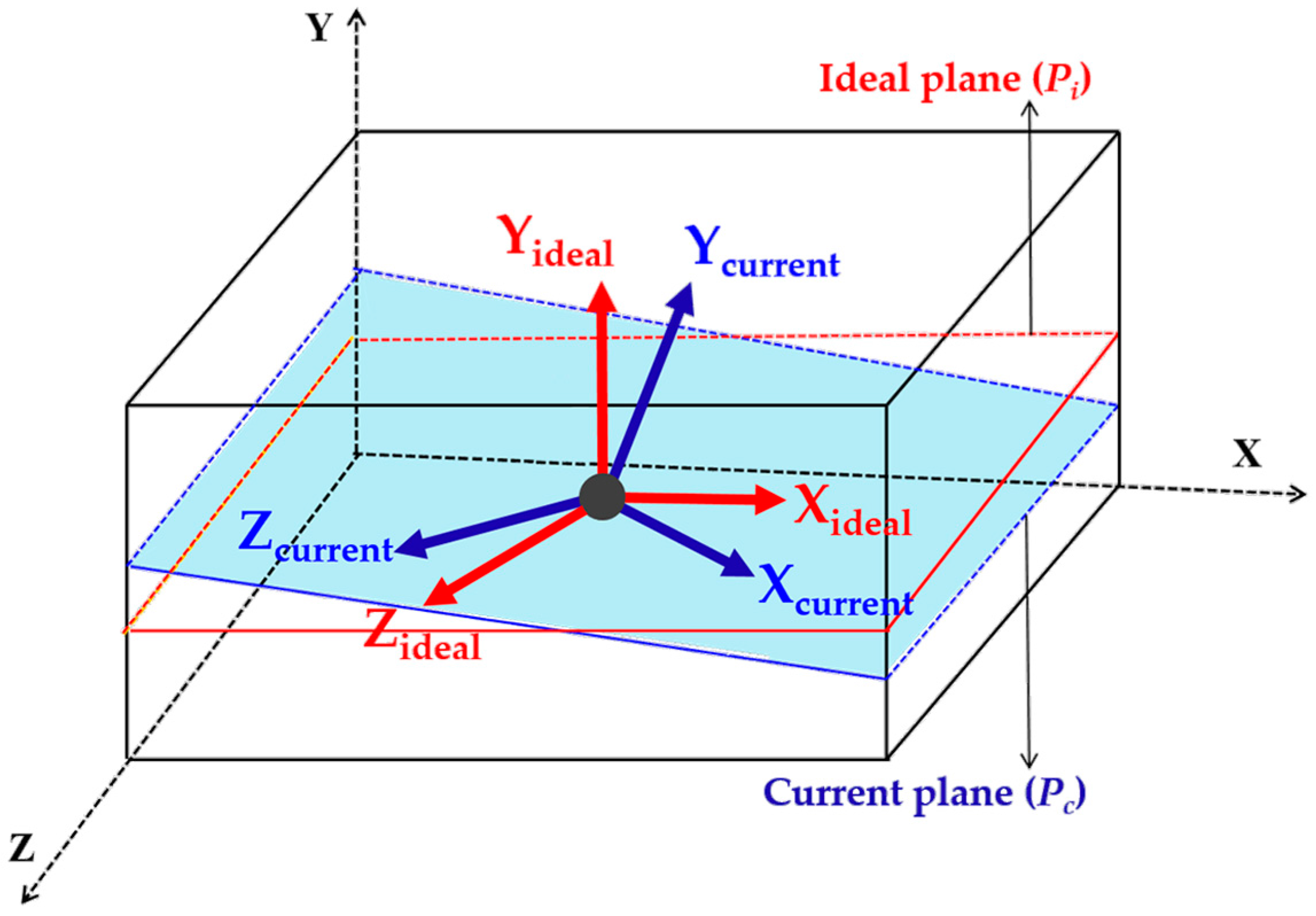
3.1.2. Ideal Scanner Plane
3.2. UAV Altitude Estimation
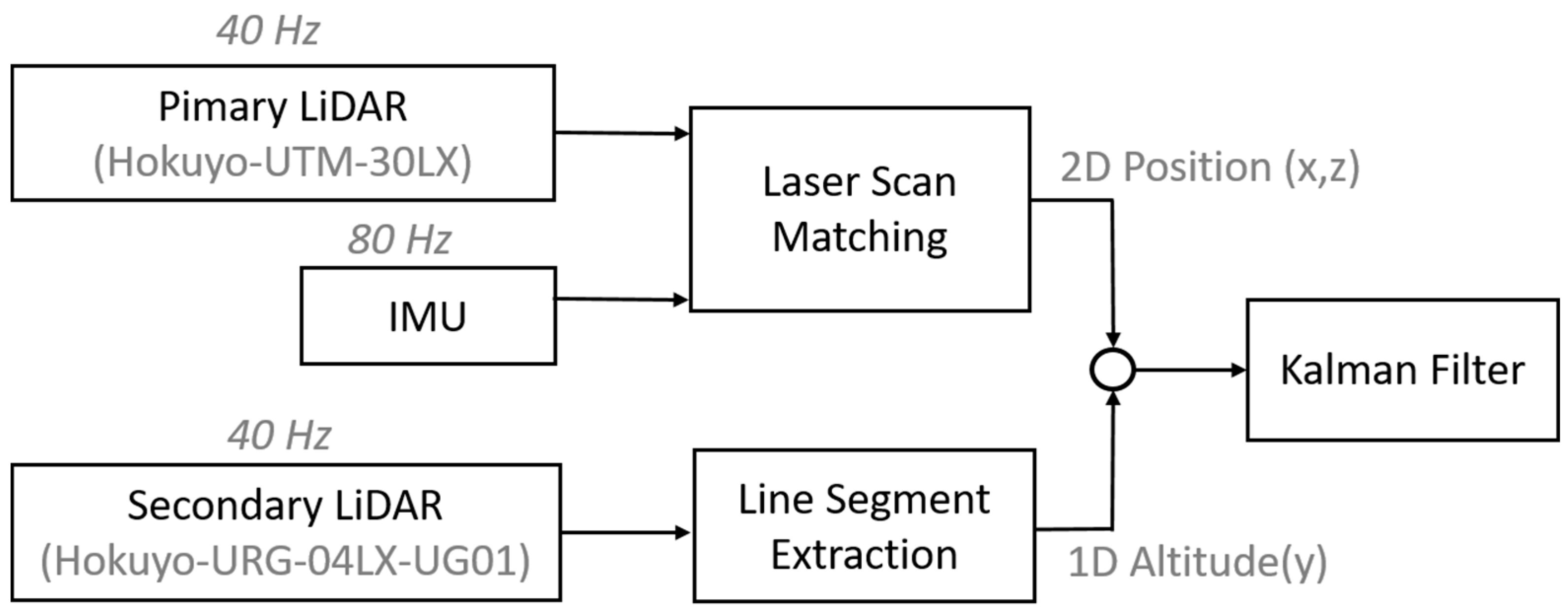
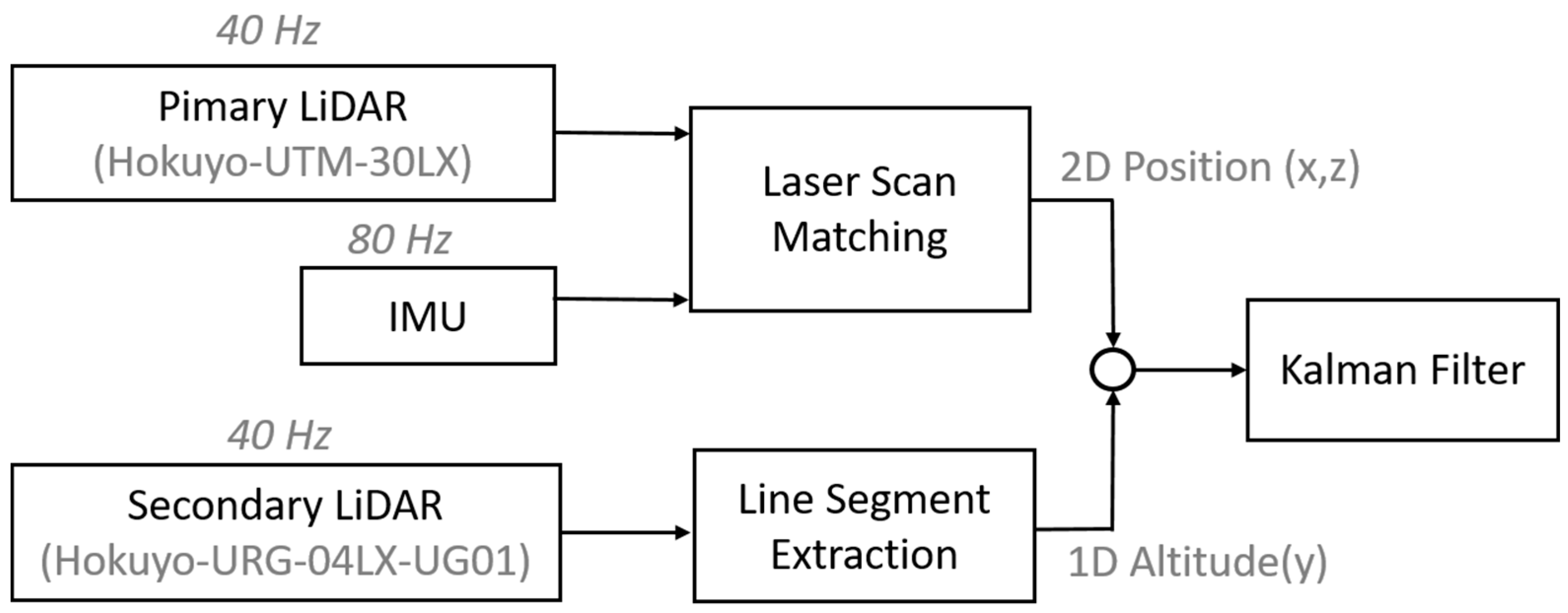
3.3. Kalman Filtering
- : X coordinate of the 2D position at the kth time interval from the scan matching algorithm.
- : Y coordinate of the 1D position at the kth time interval from the altitude estimation algorithm.
- : Z coordinate of the 2D position at the kth time interval from the scan matching algorithm.
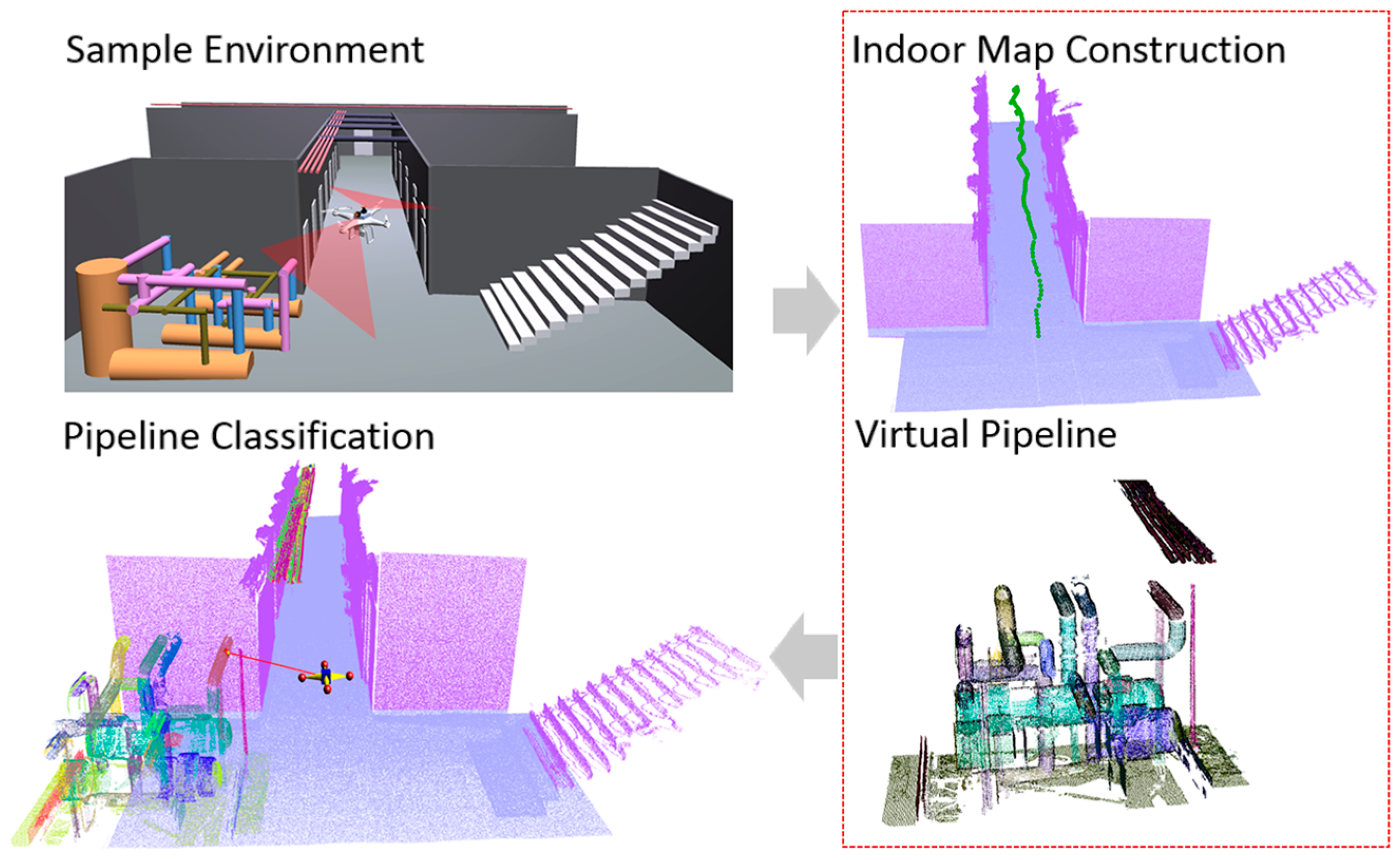
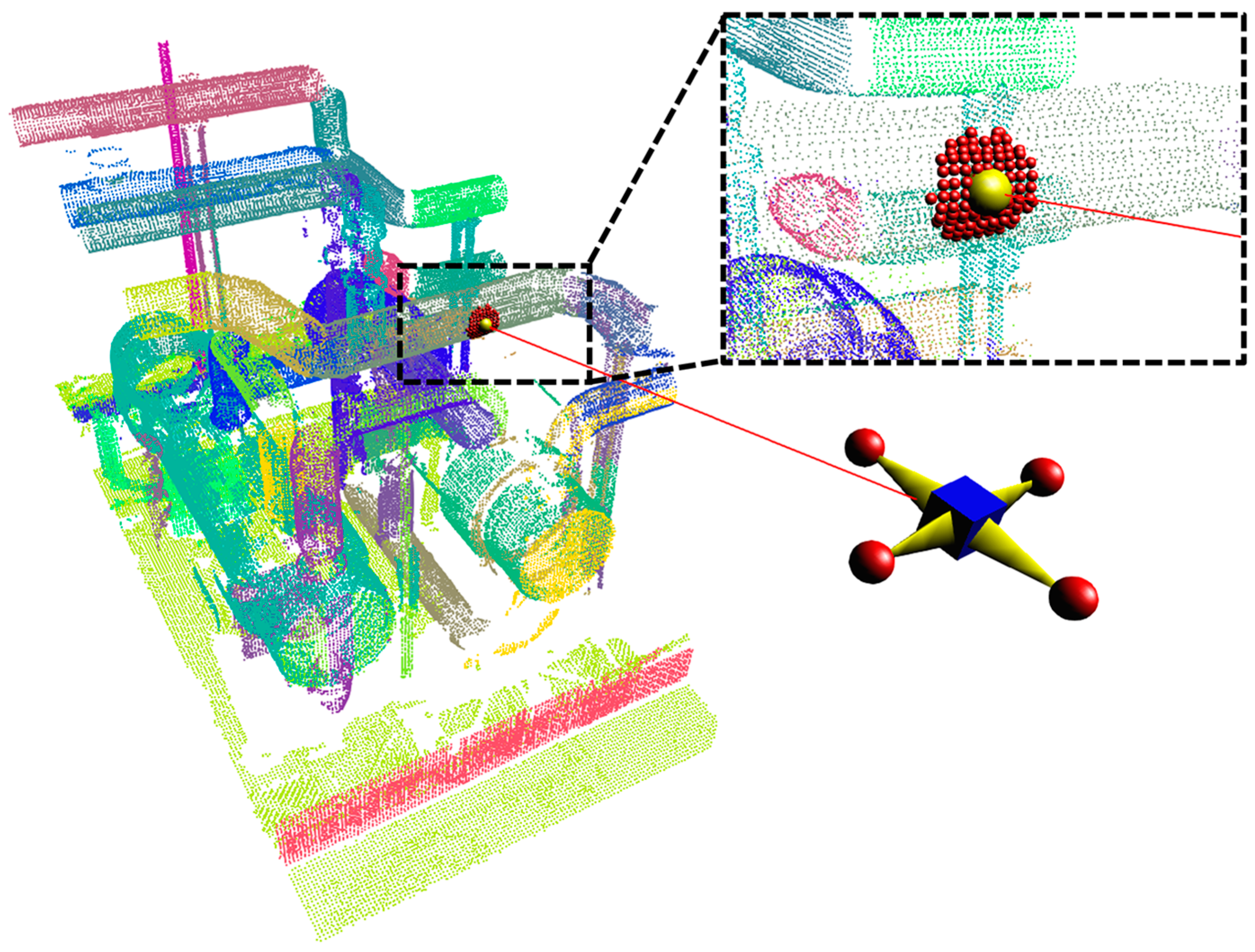
4. Pipeline Classification
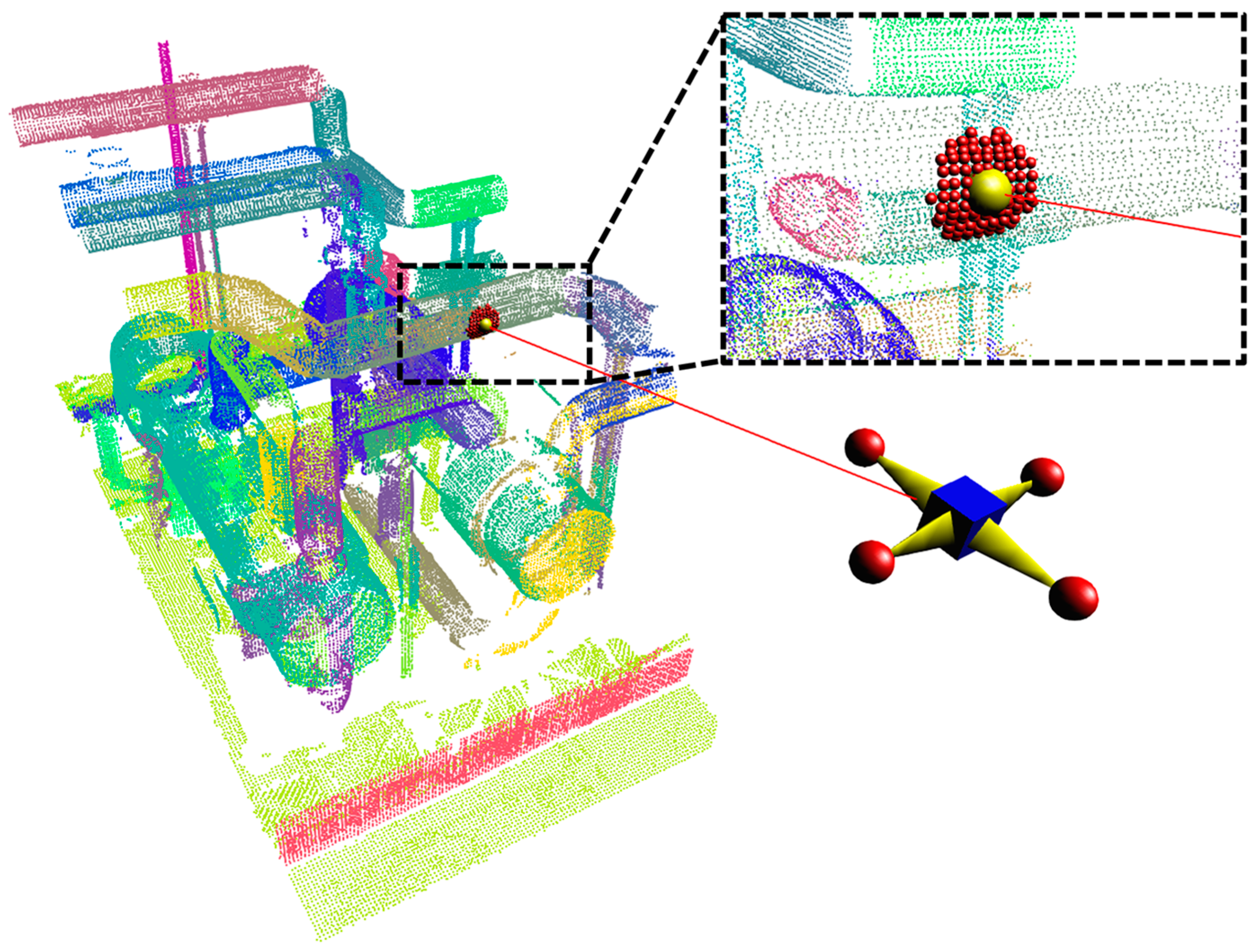
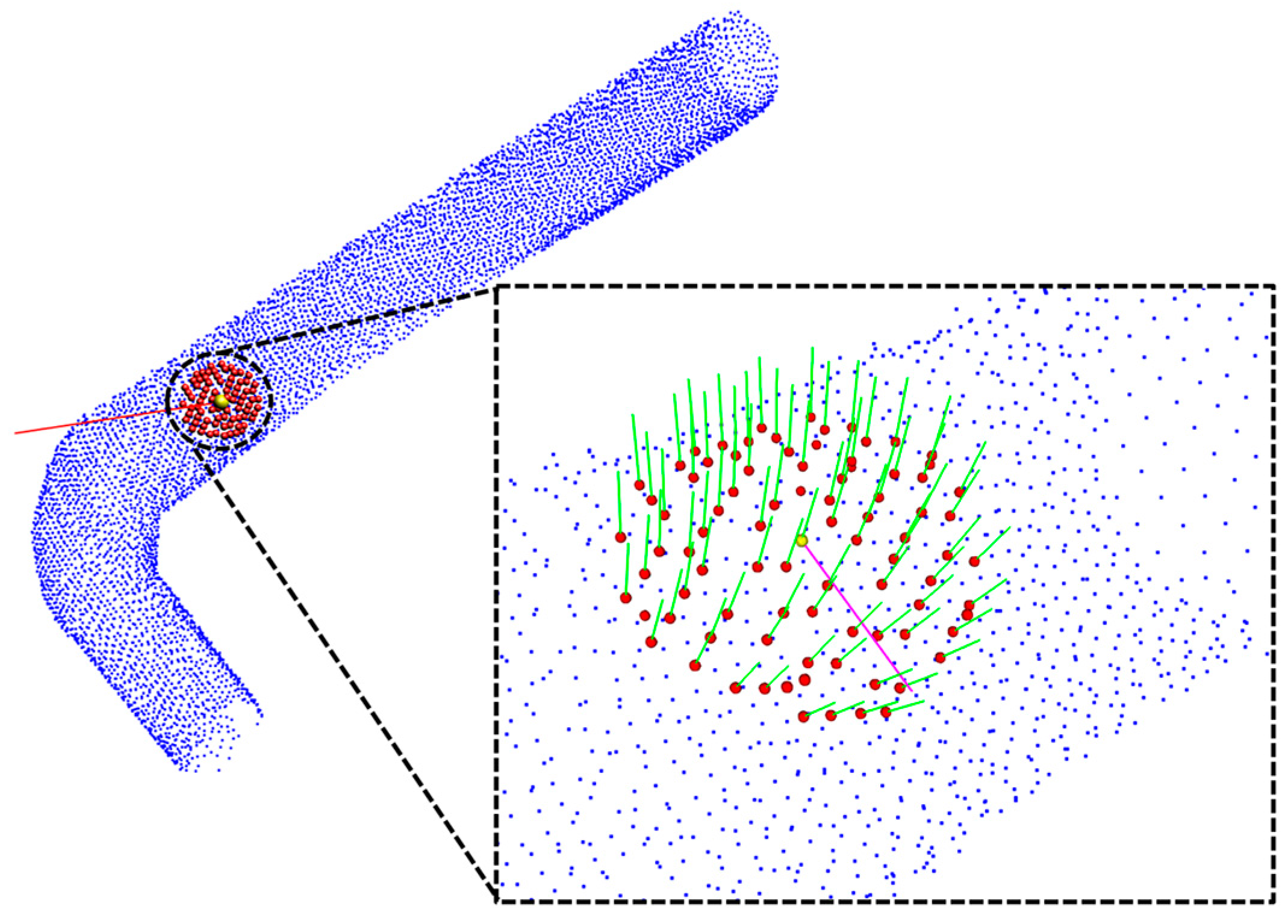
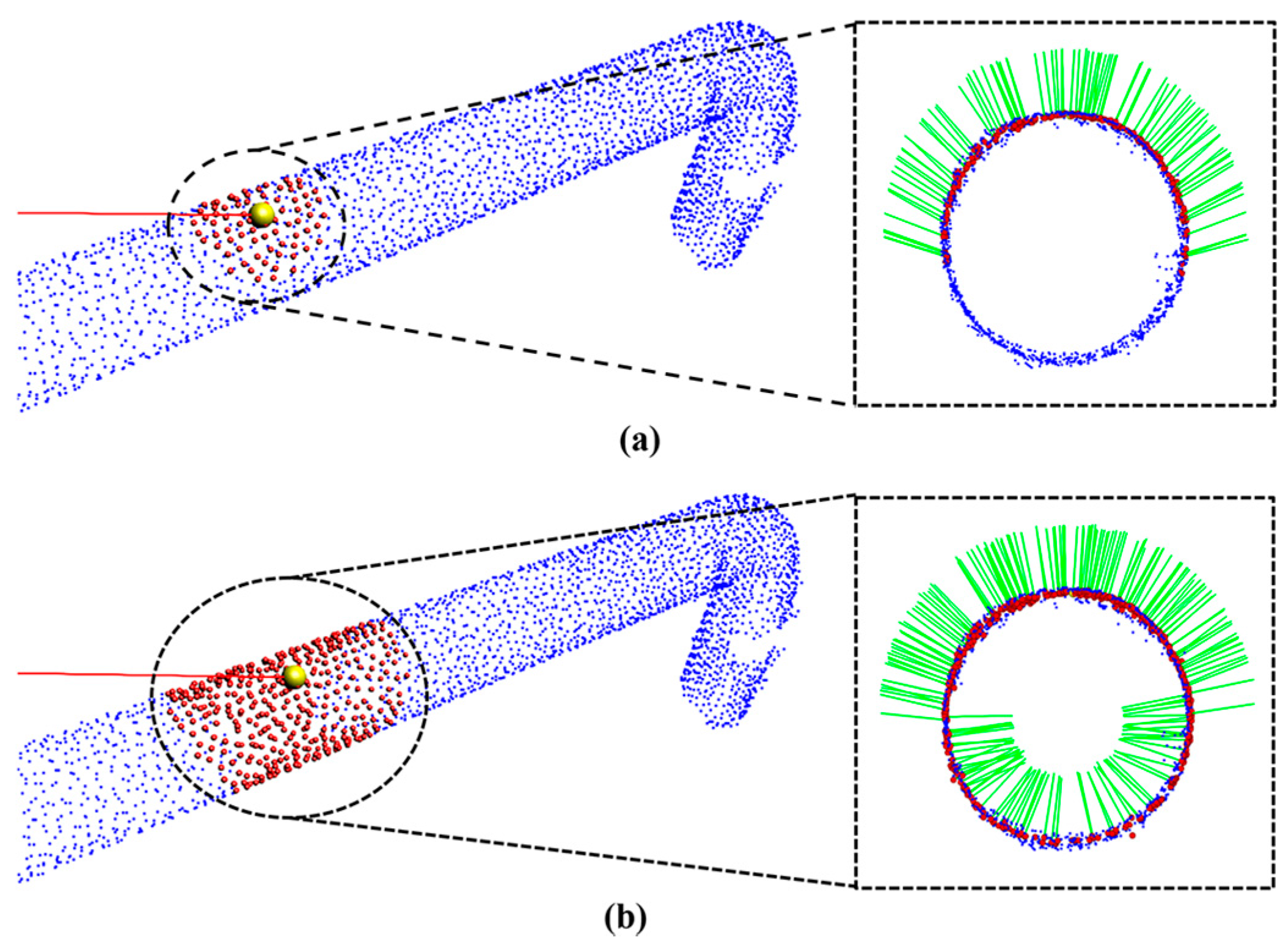
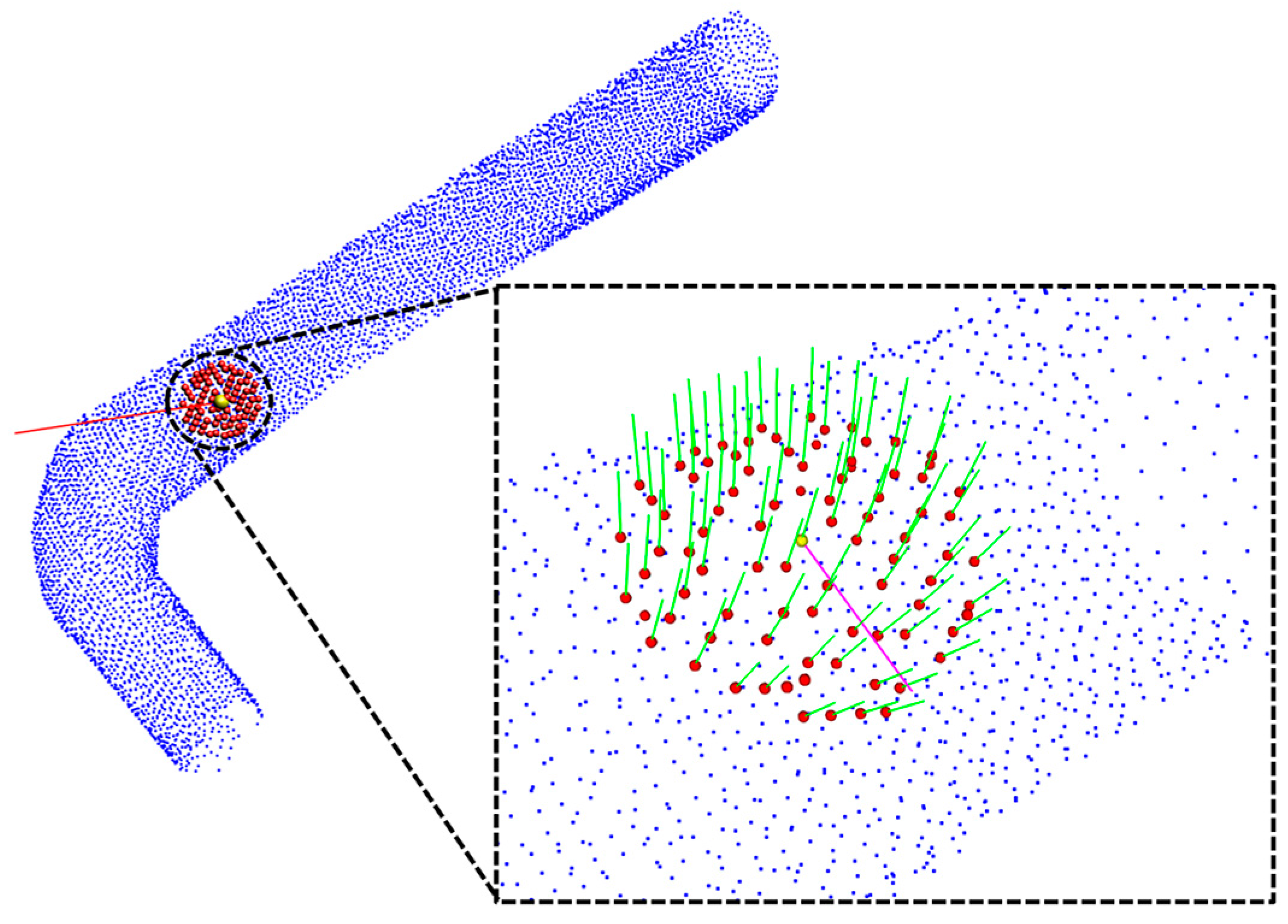
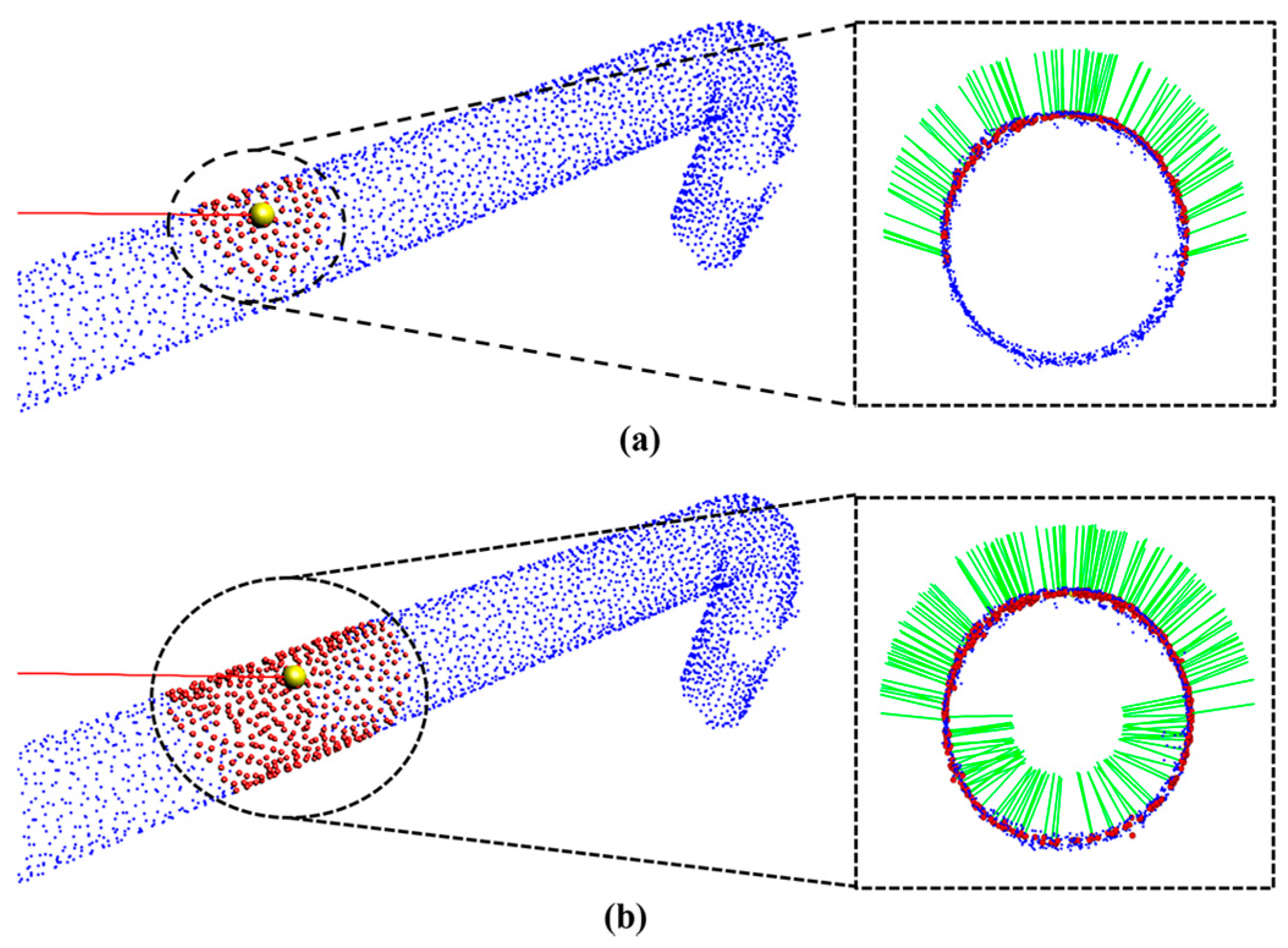
4.1. Seed-Point Selection and Its Neighboring Point Estimation
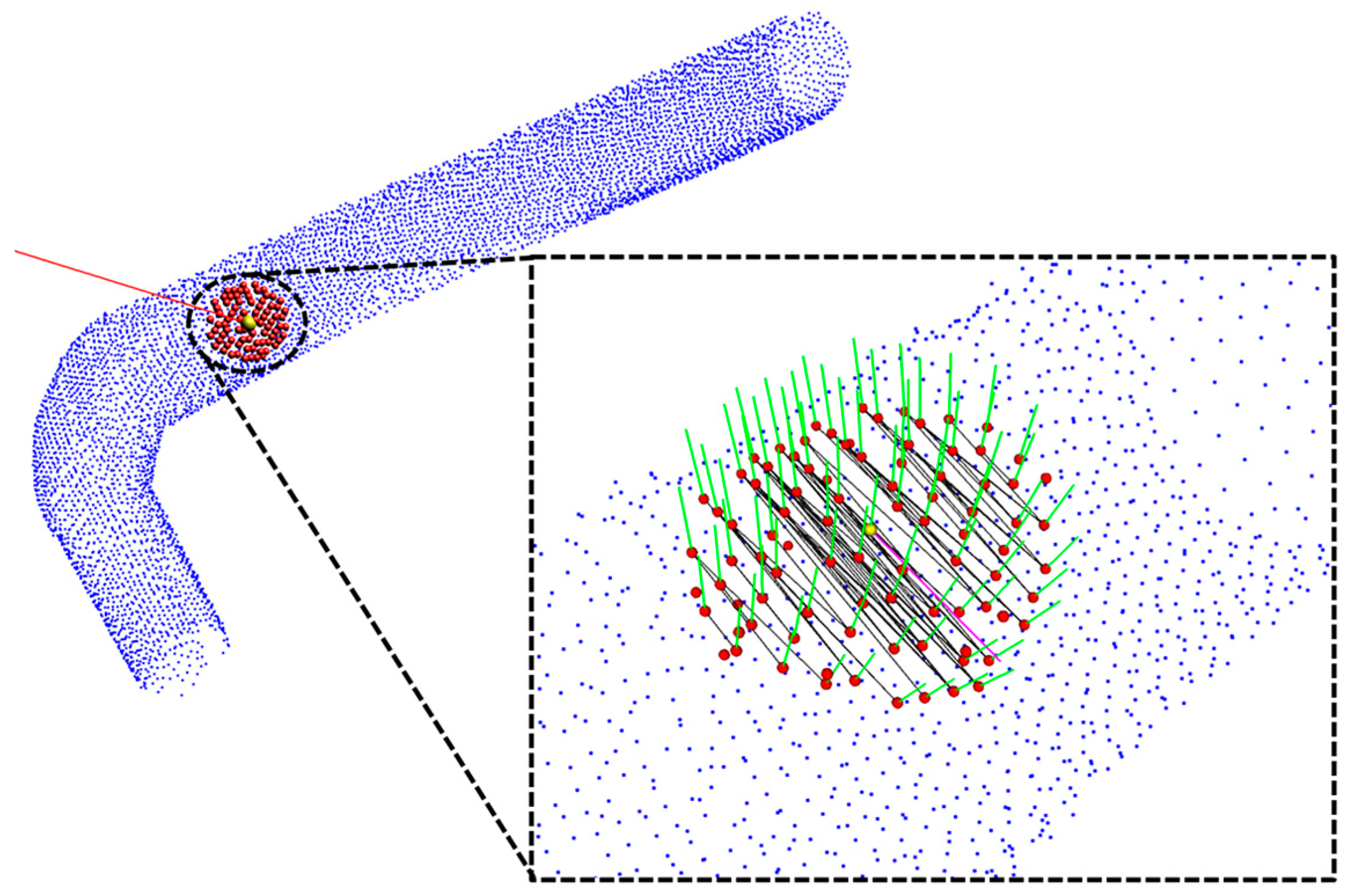
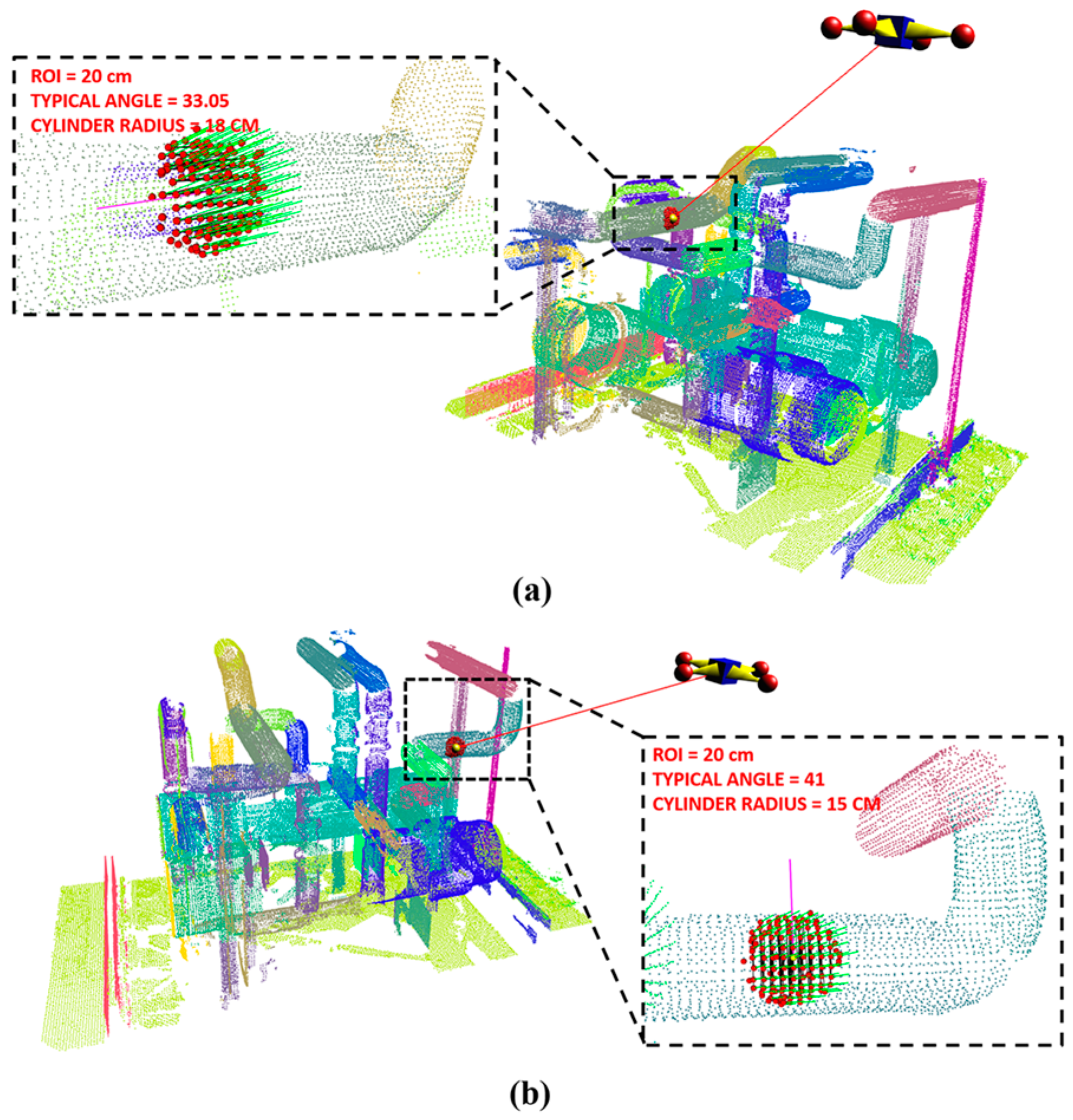
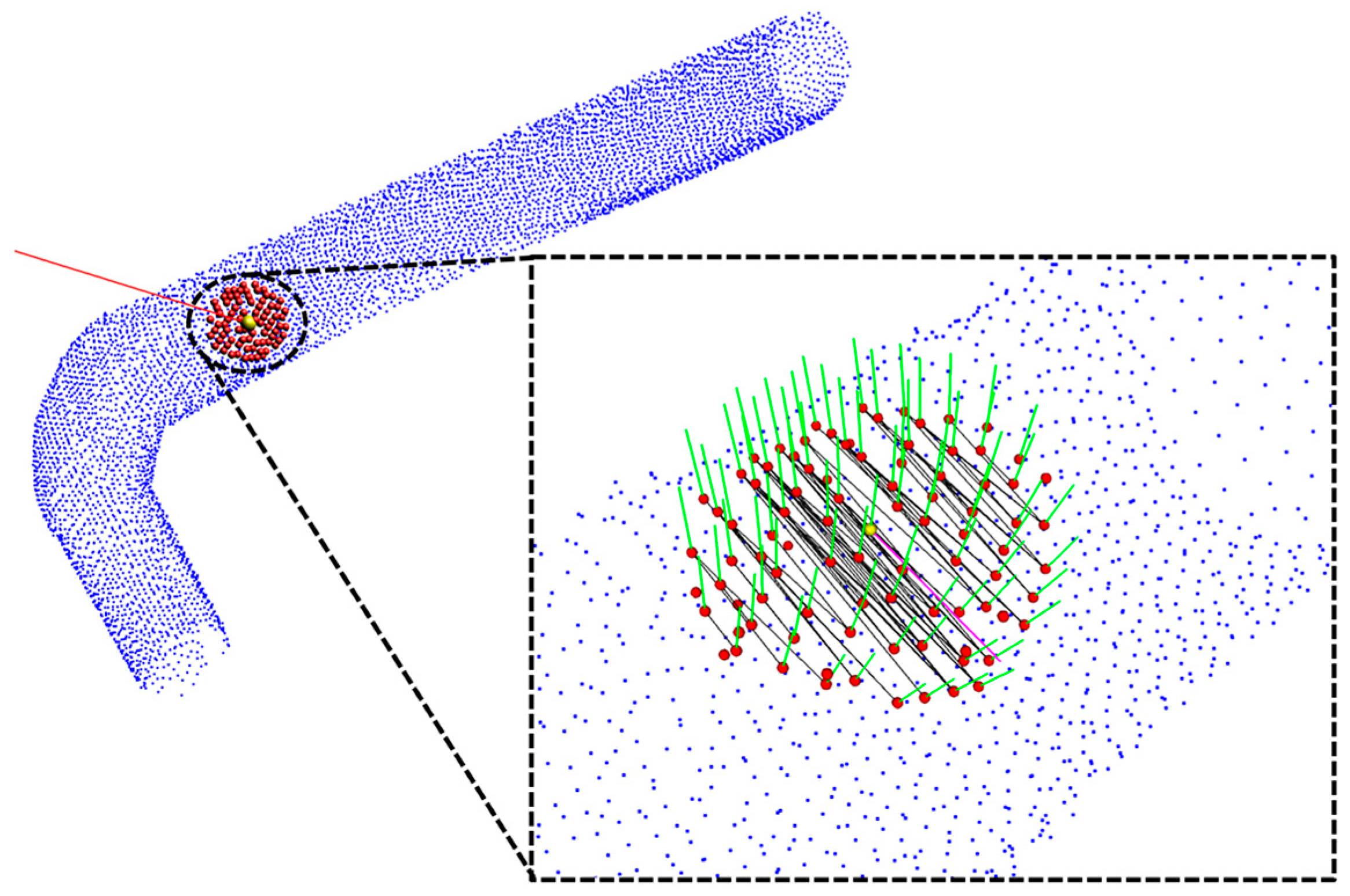
4.2. Normal and Tangential Vector Estimation
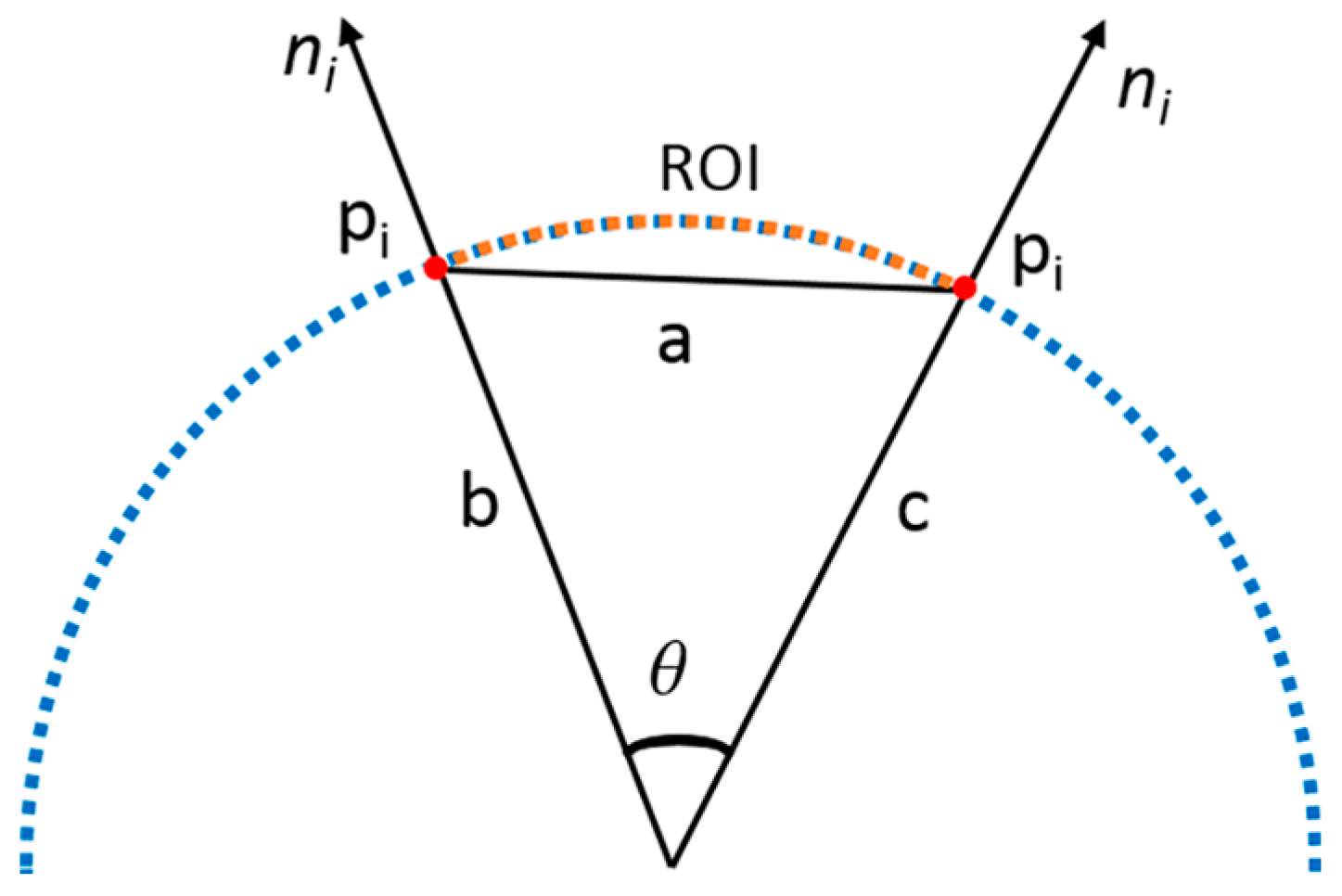
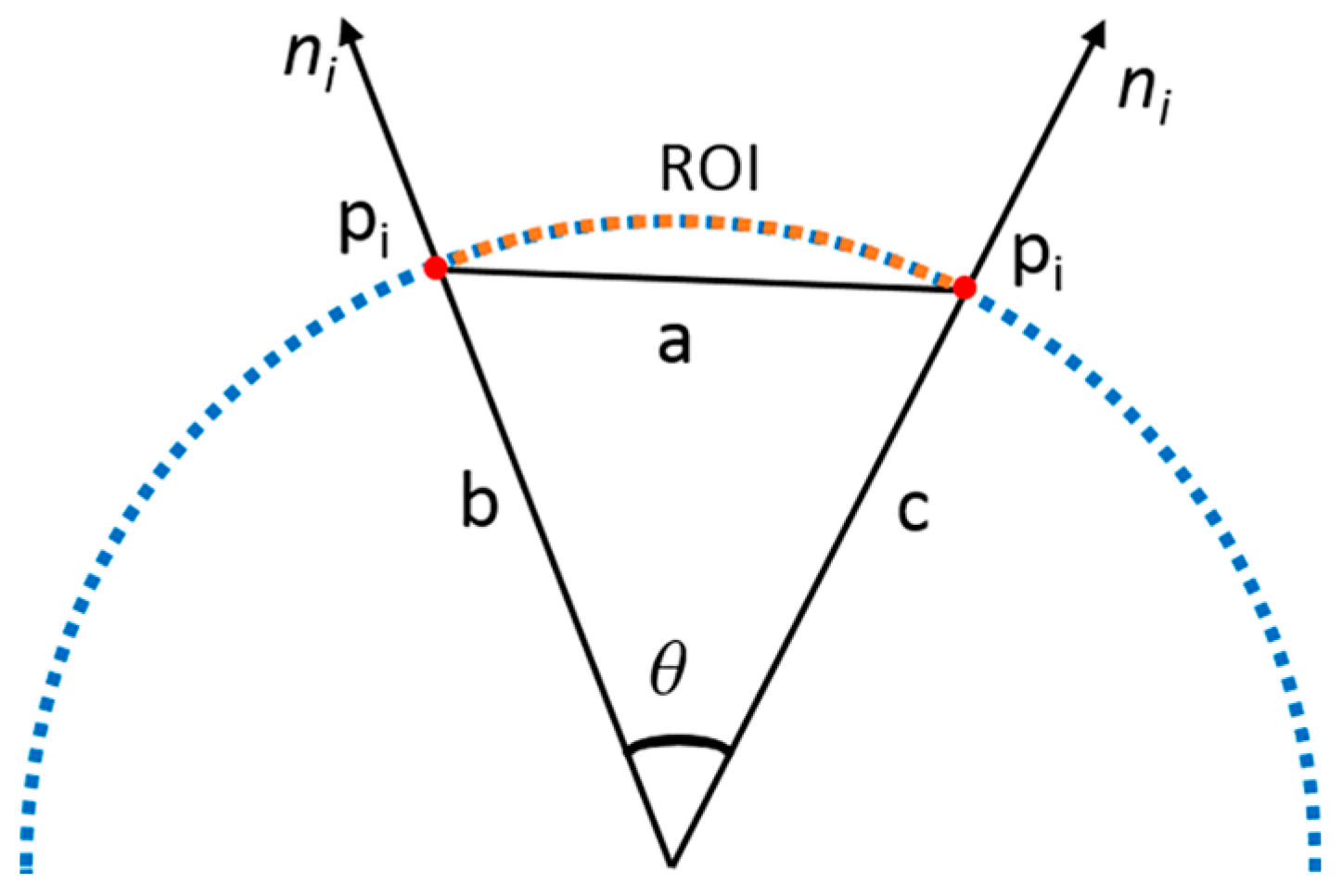
4.3. Point Pairing and Typical Angle Calculation
5. Results
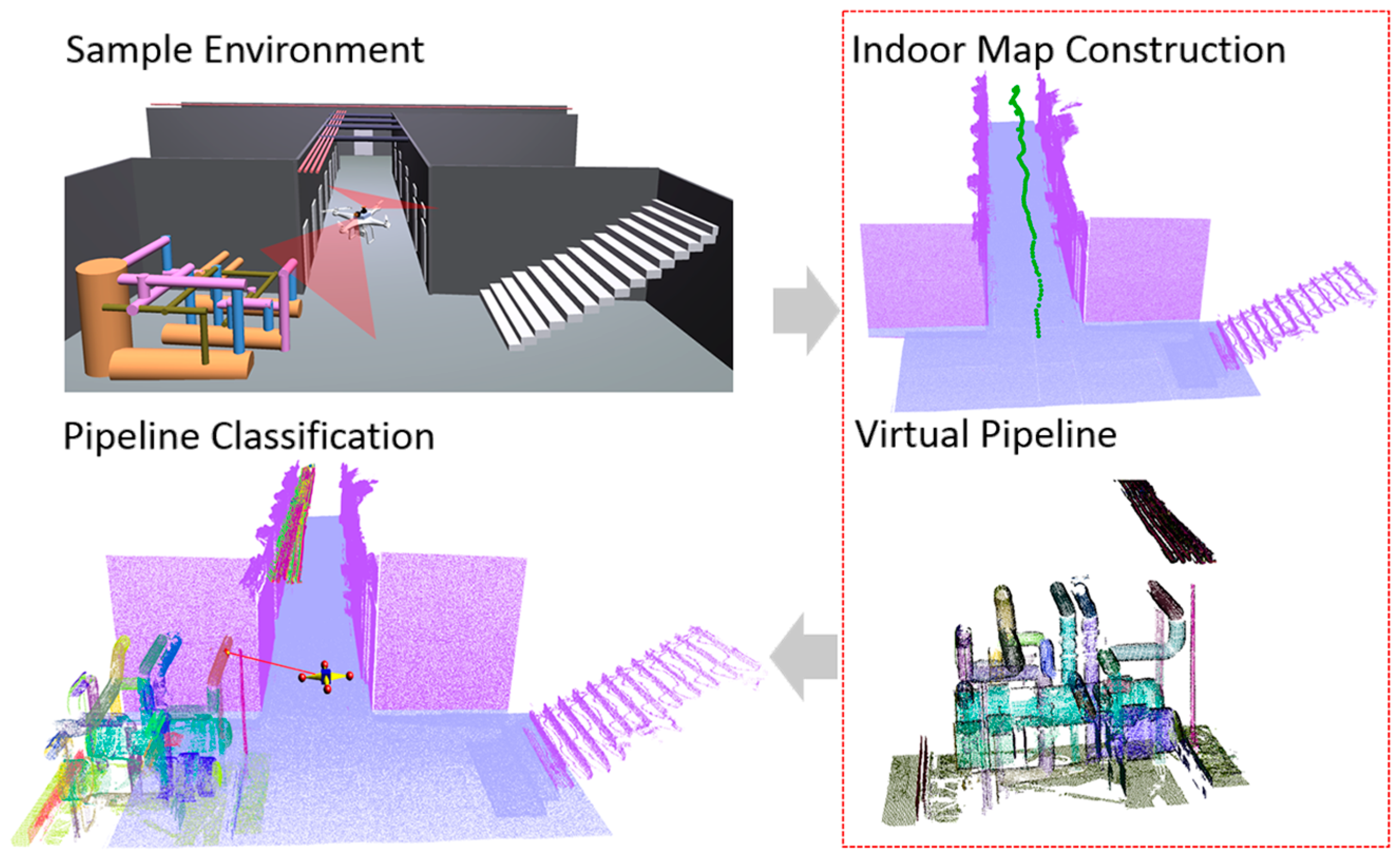
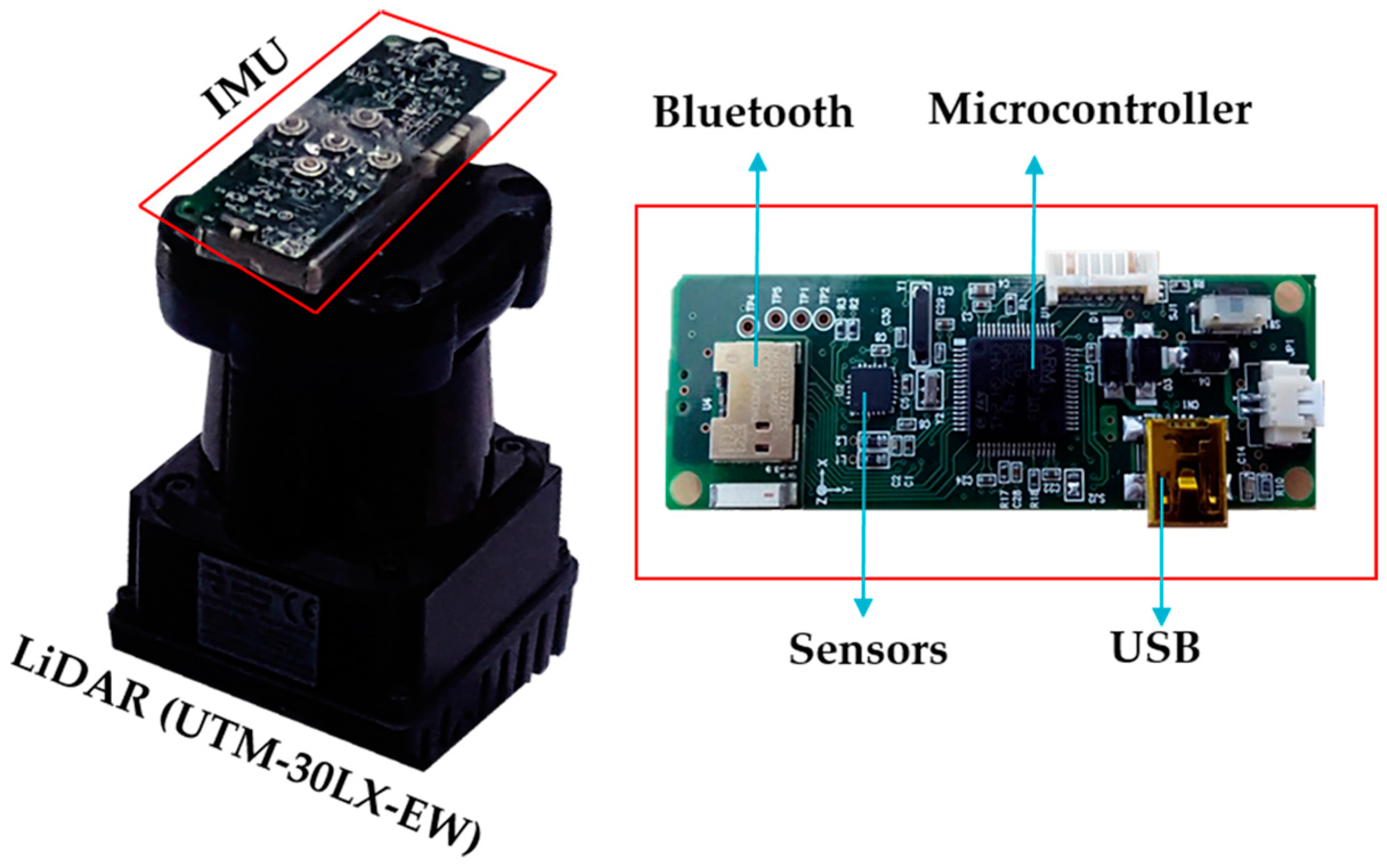
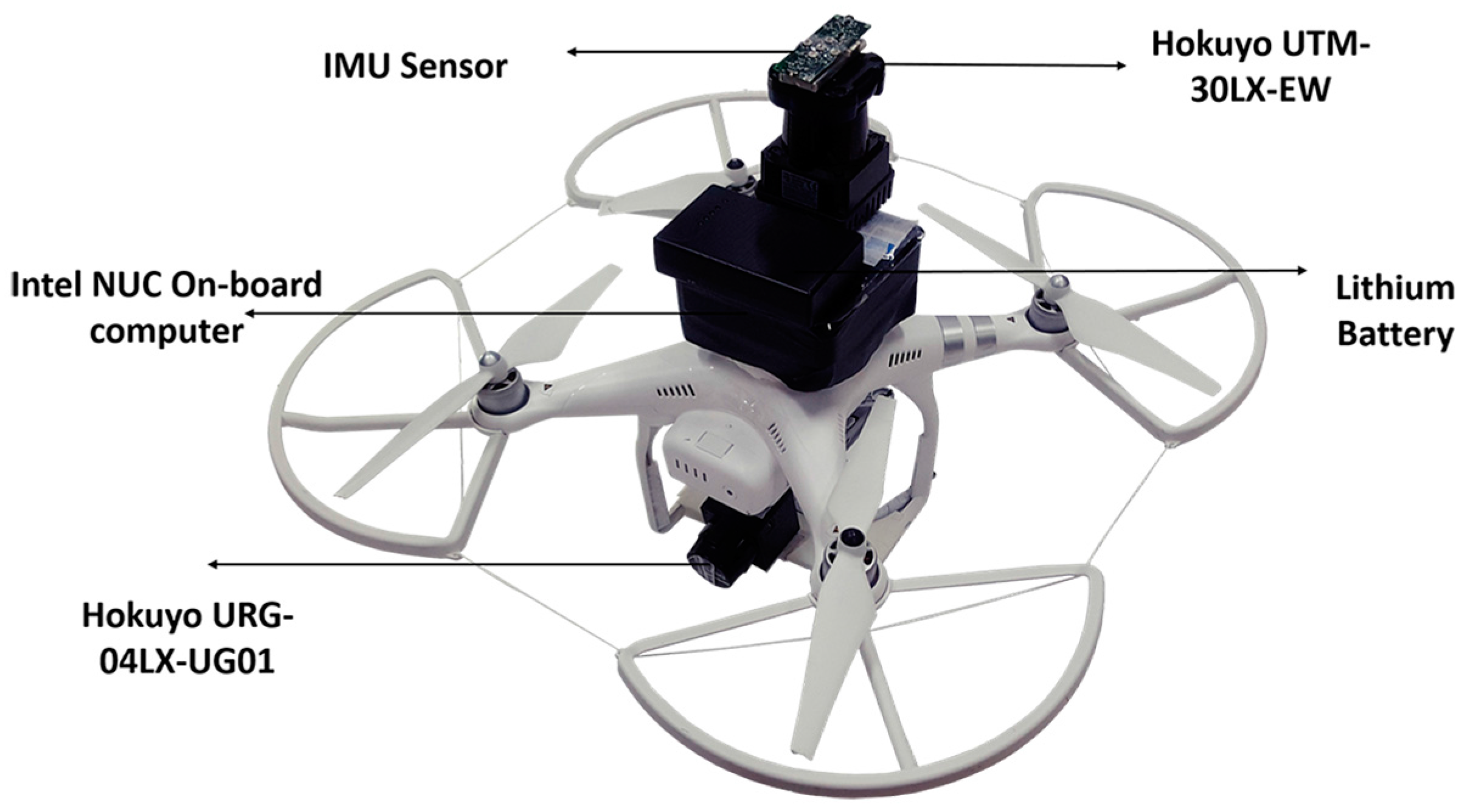
5.1. System Overview
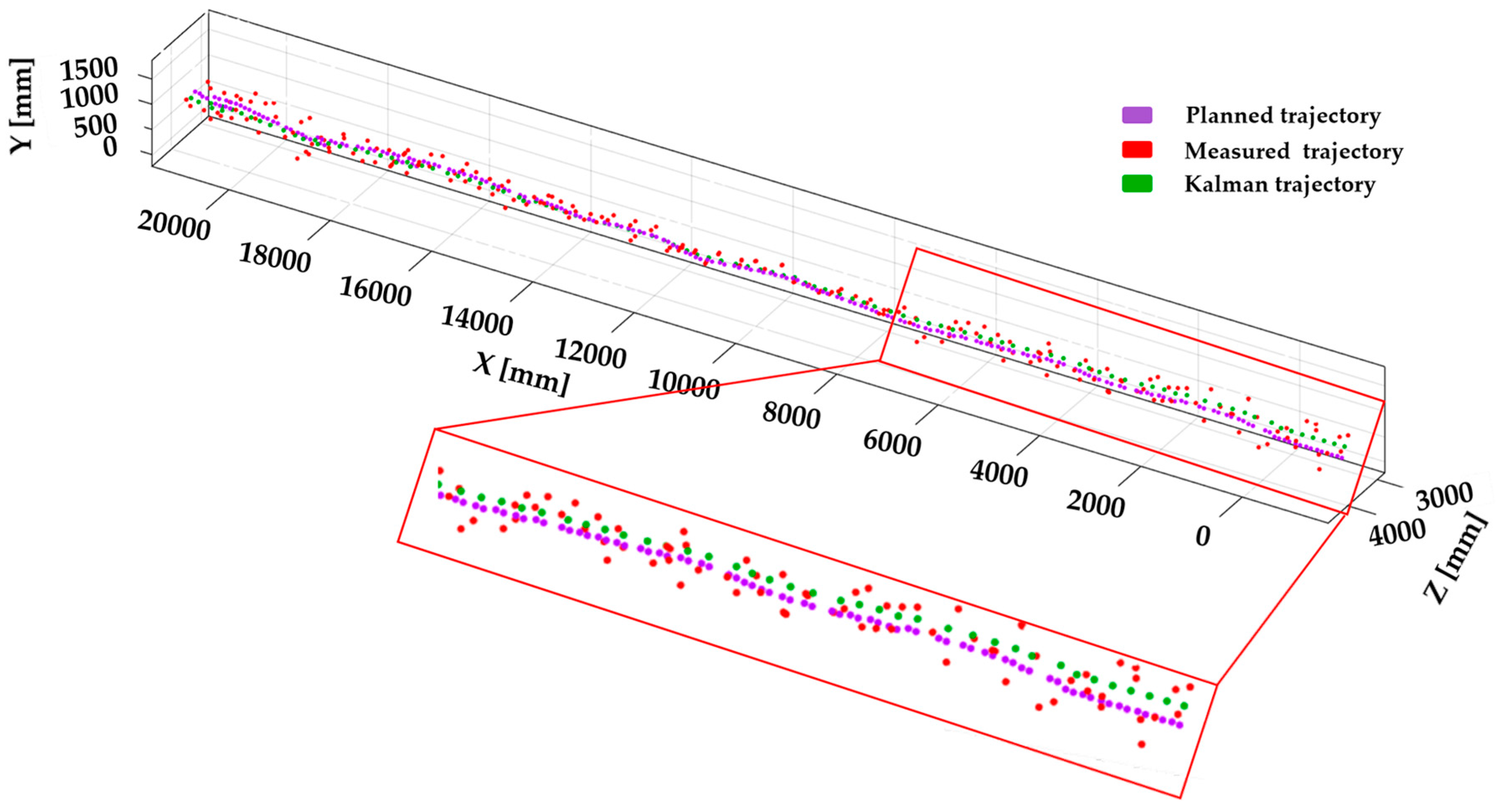
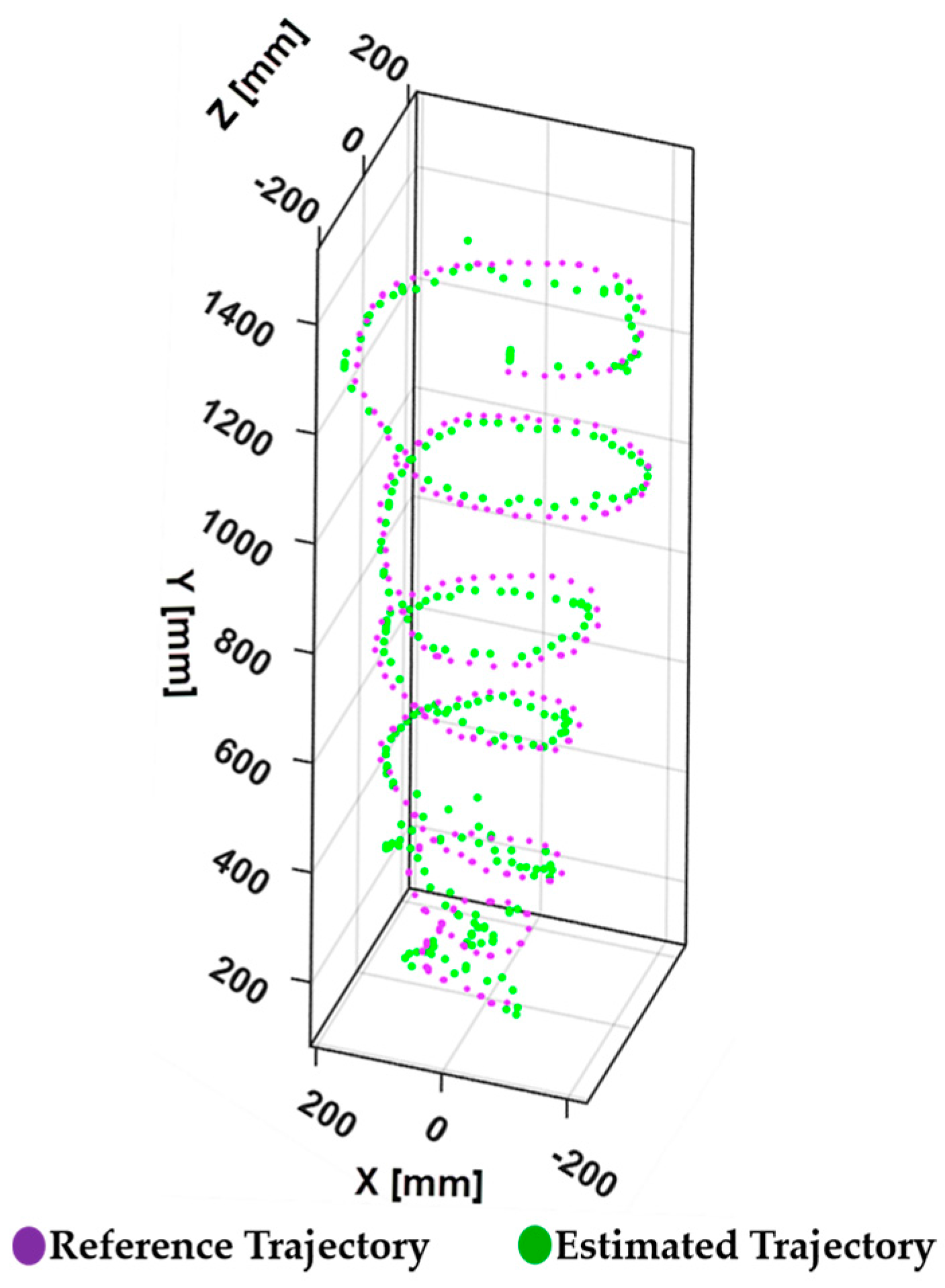
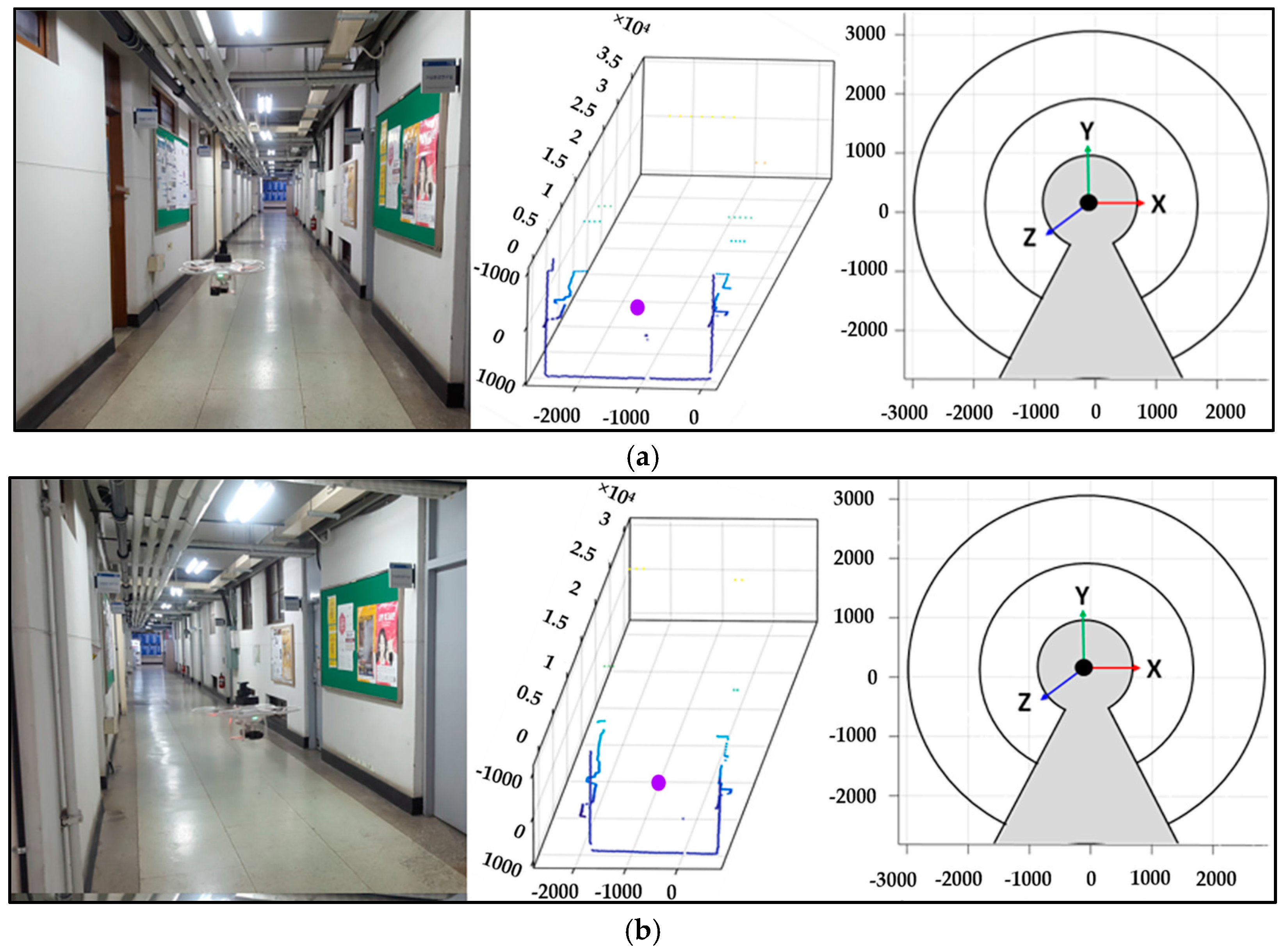
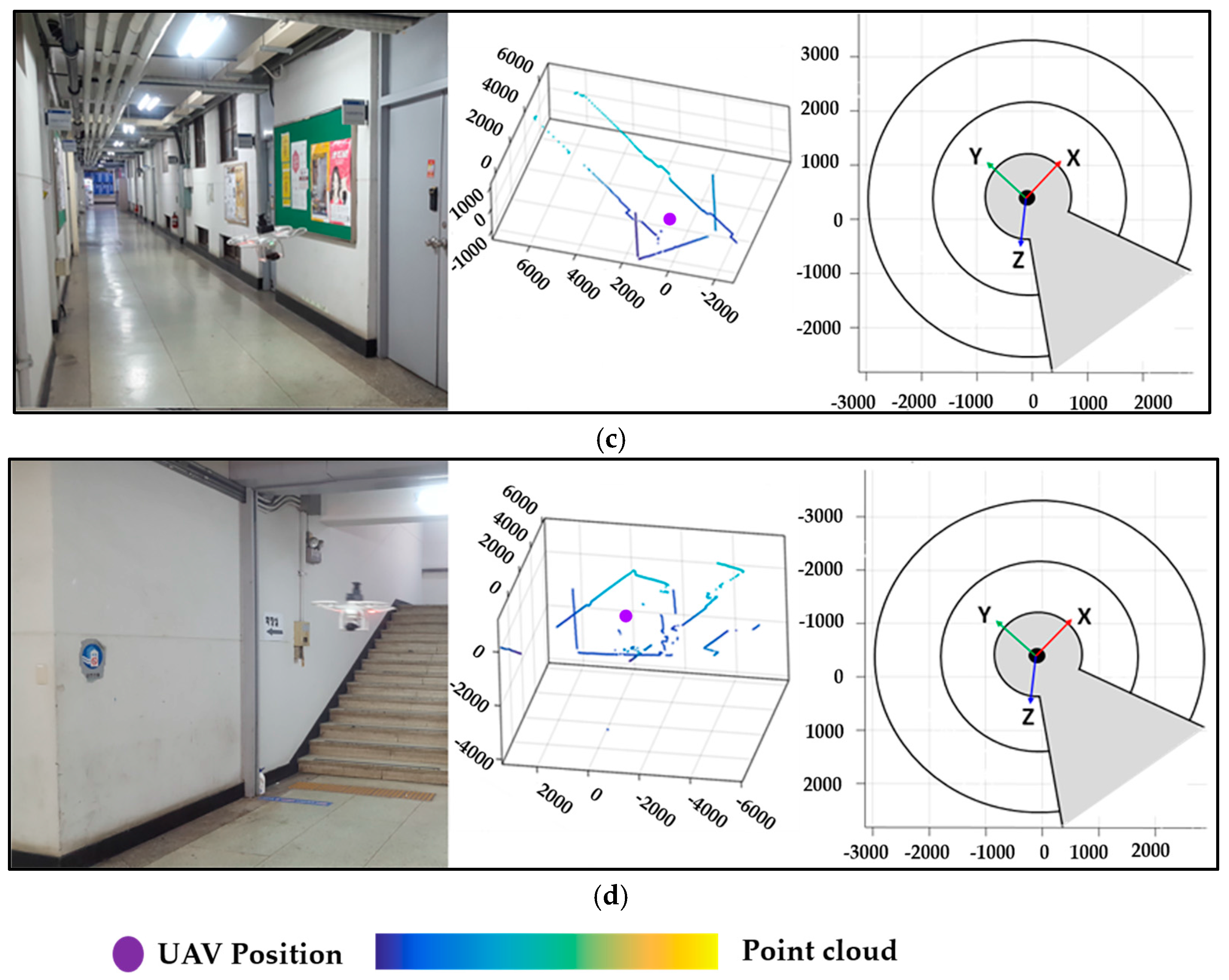
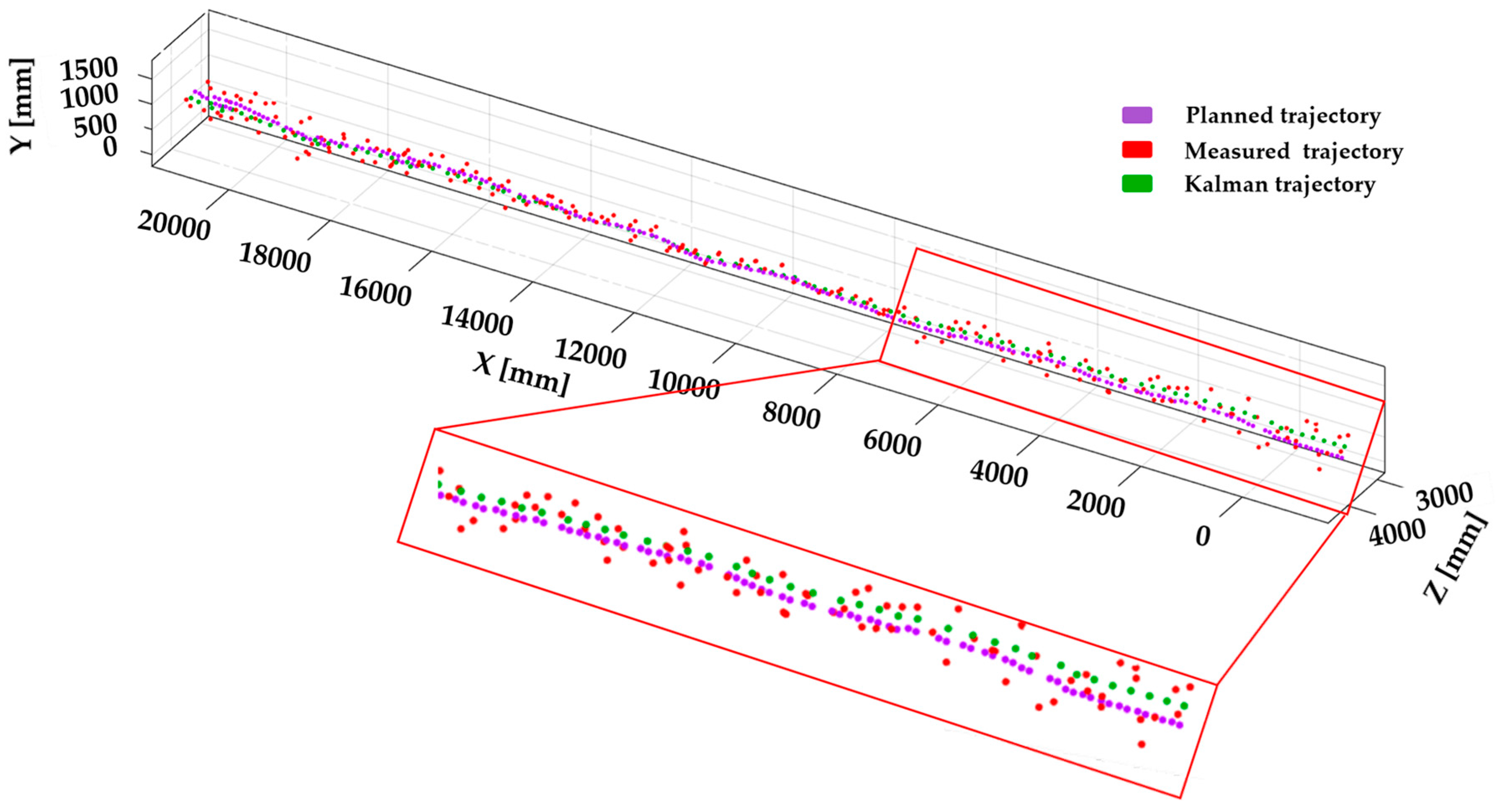
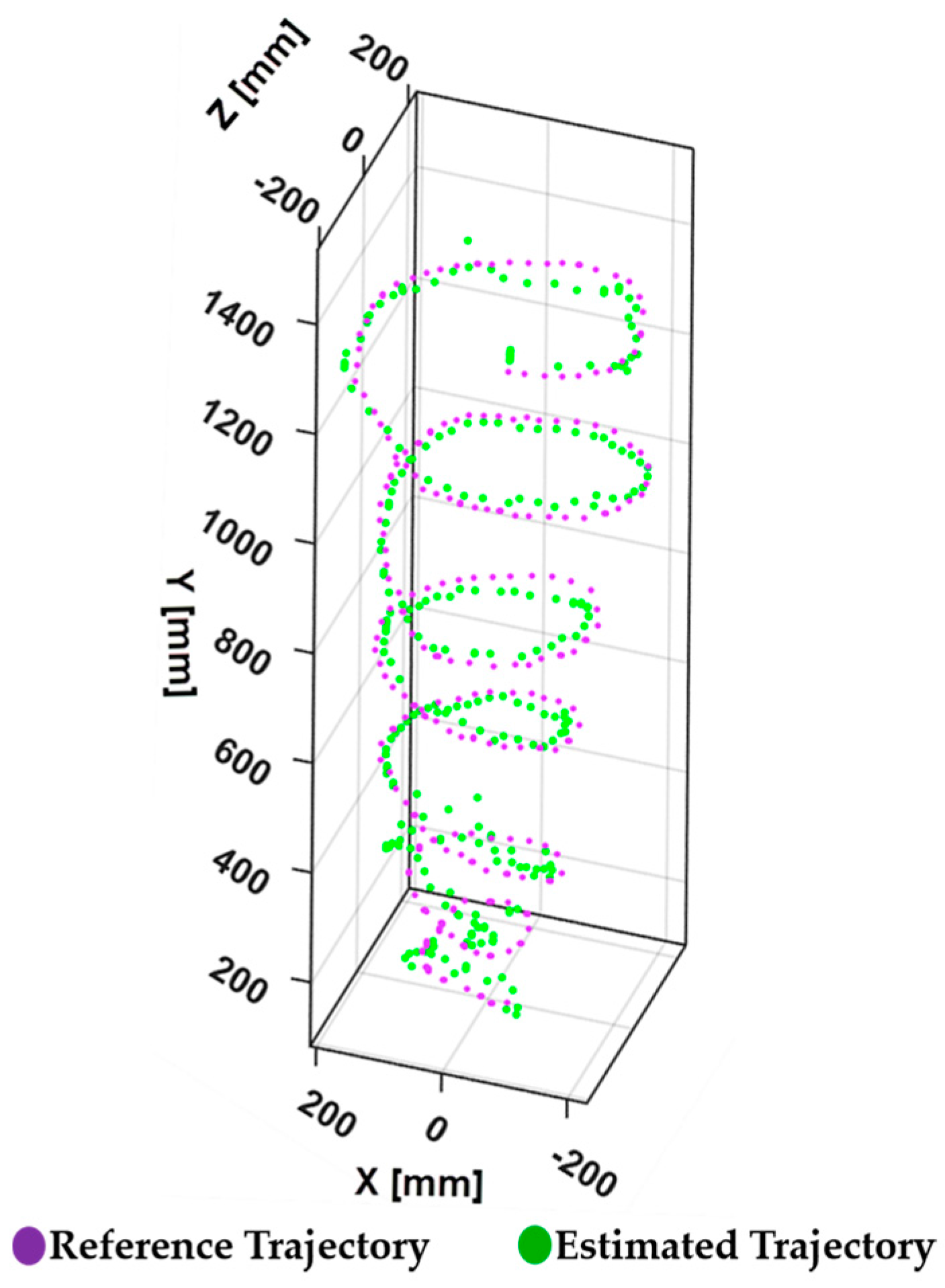
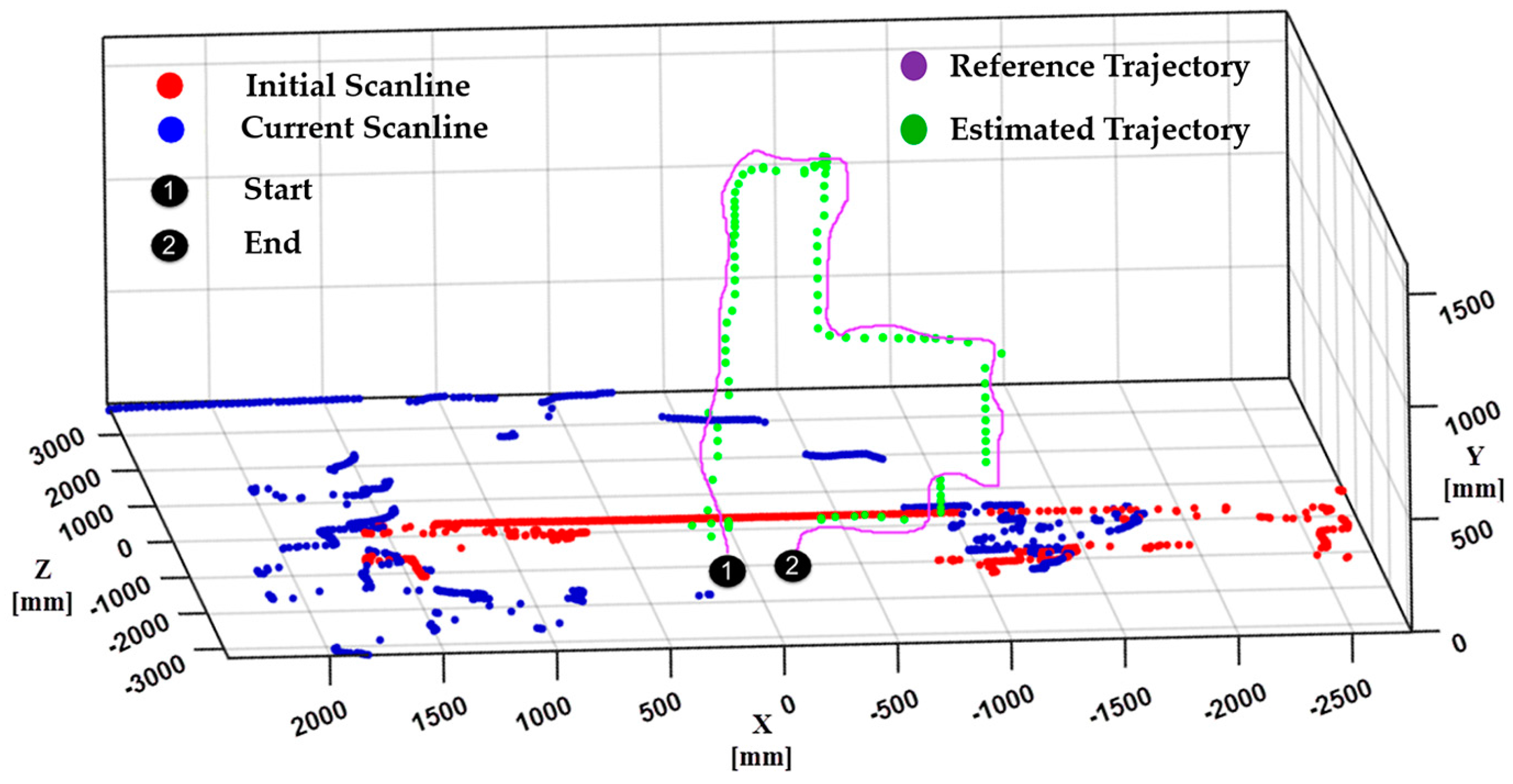
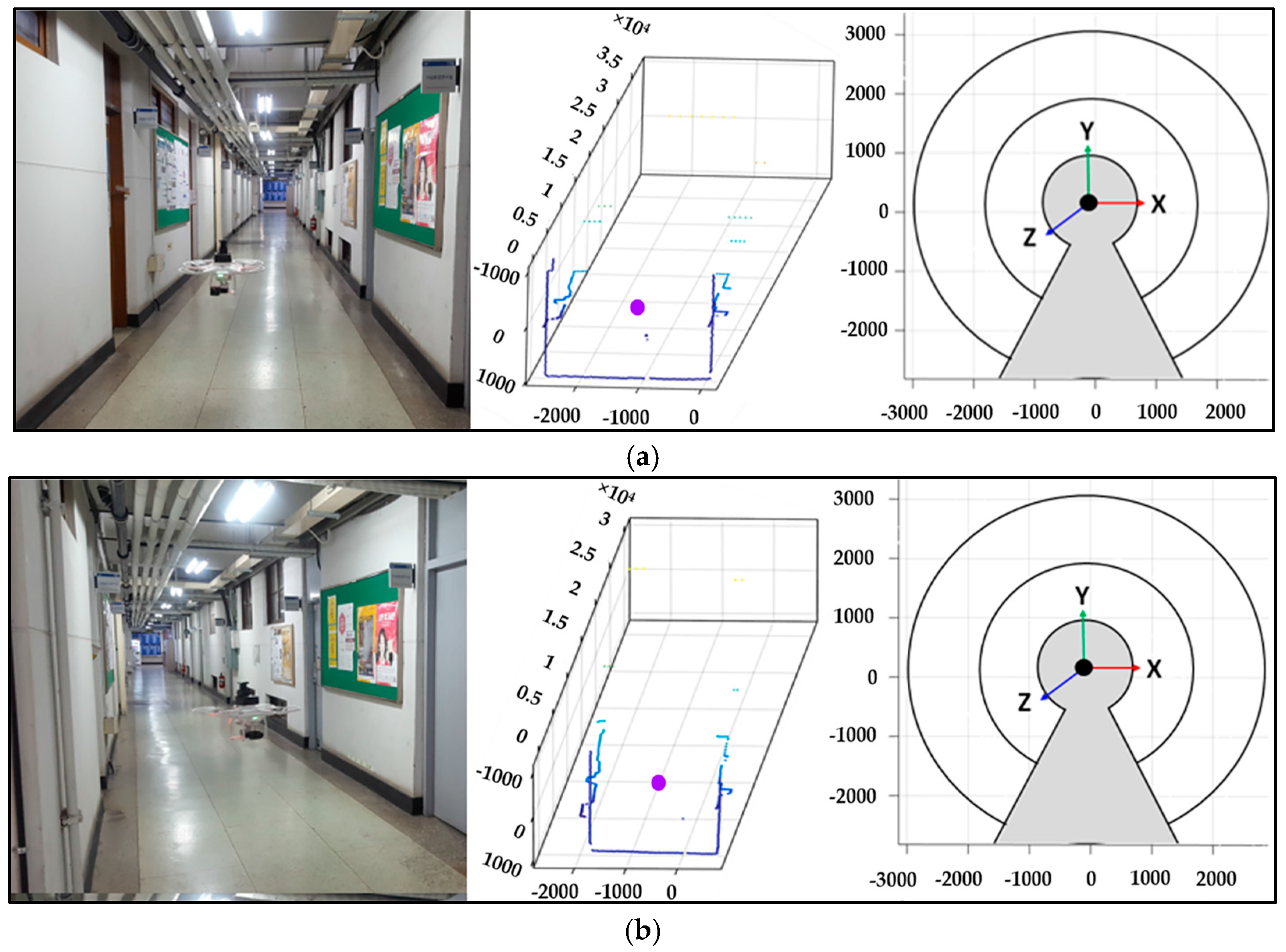
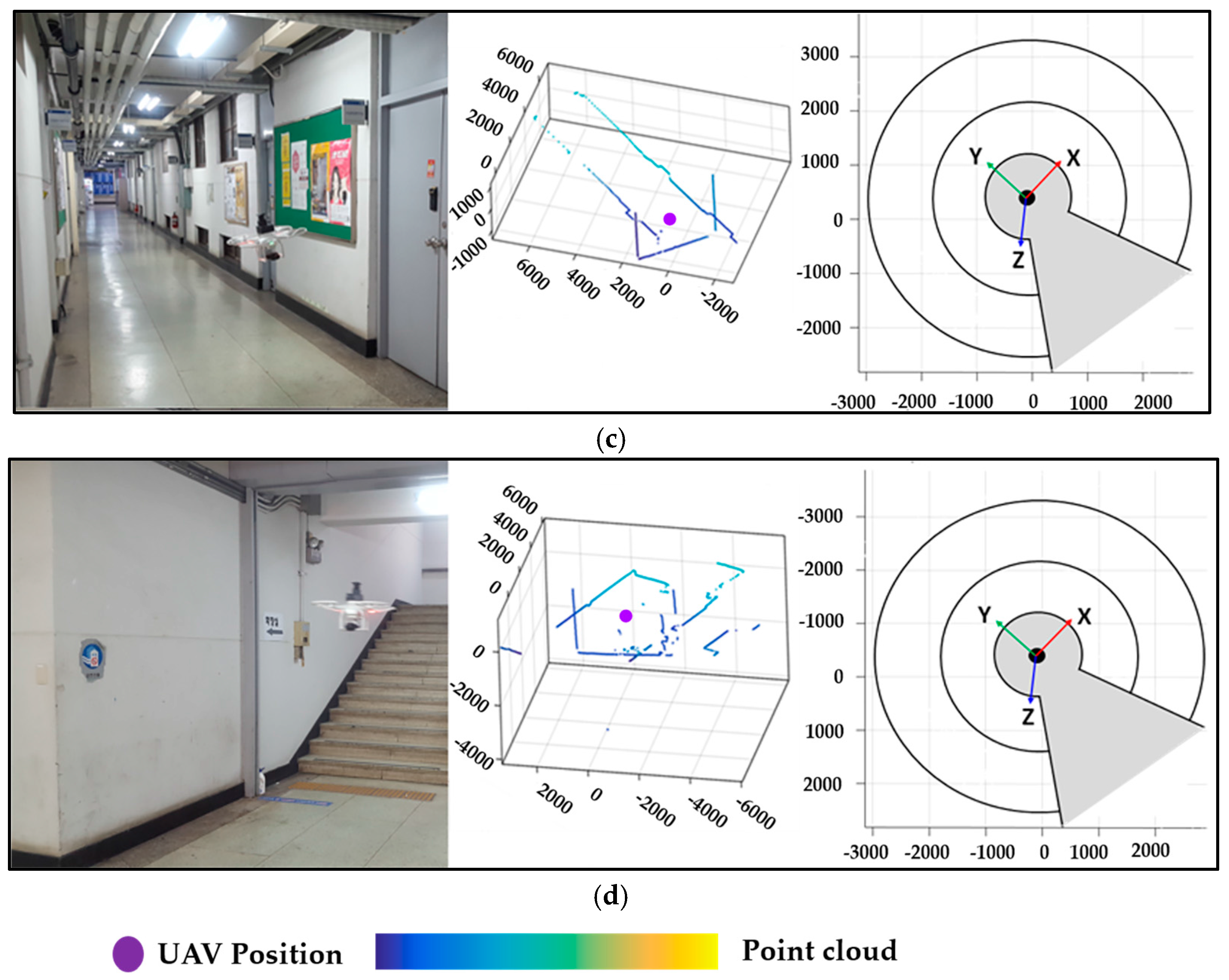
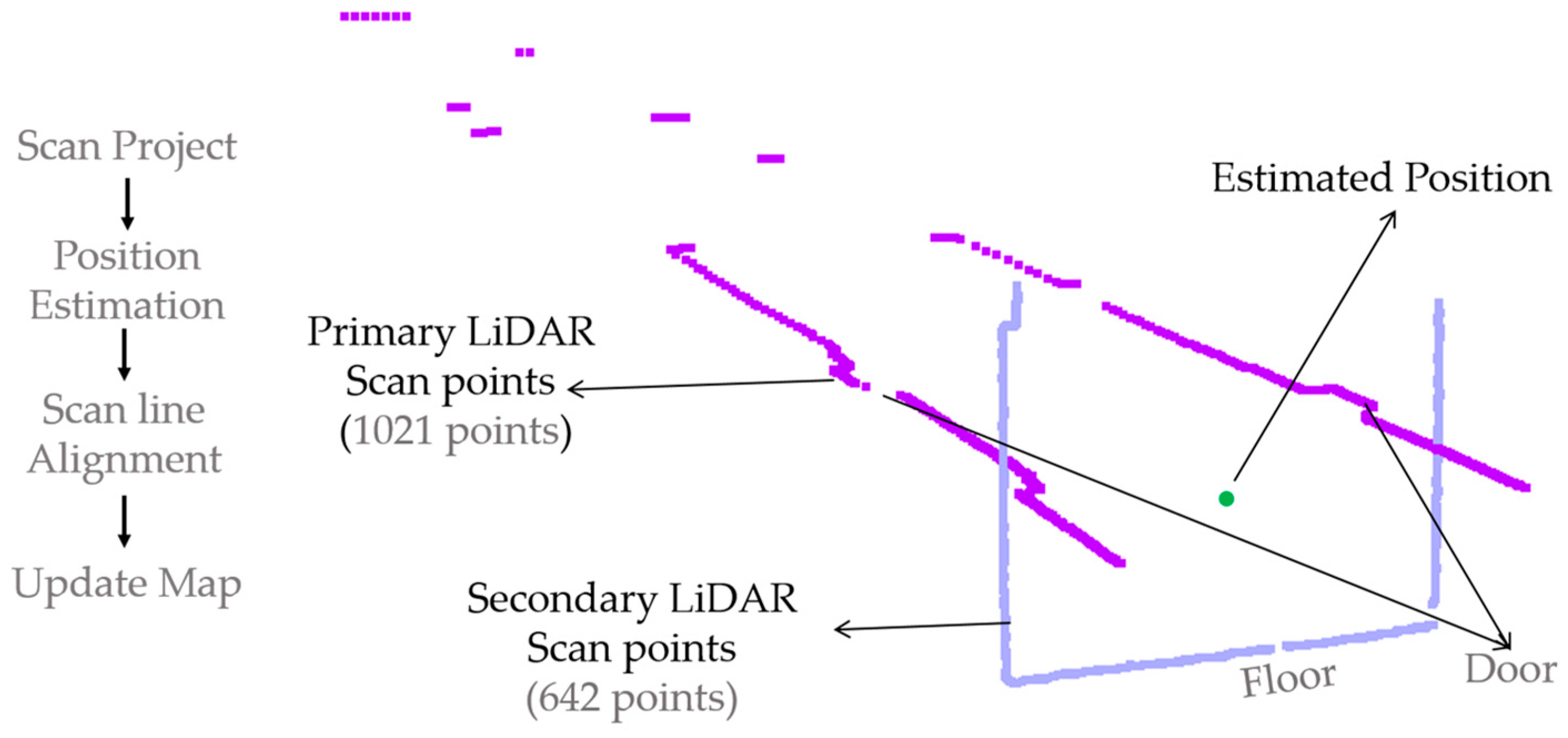
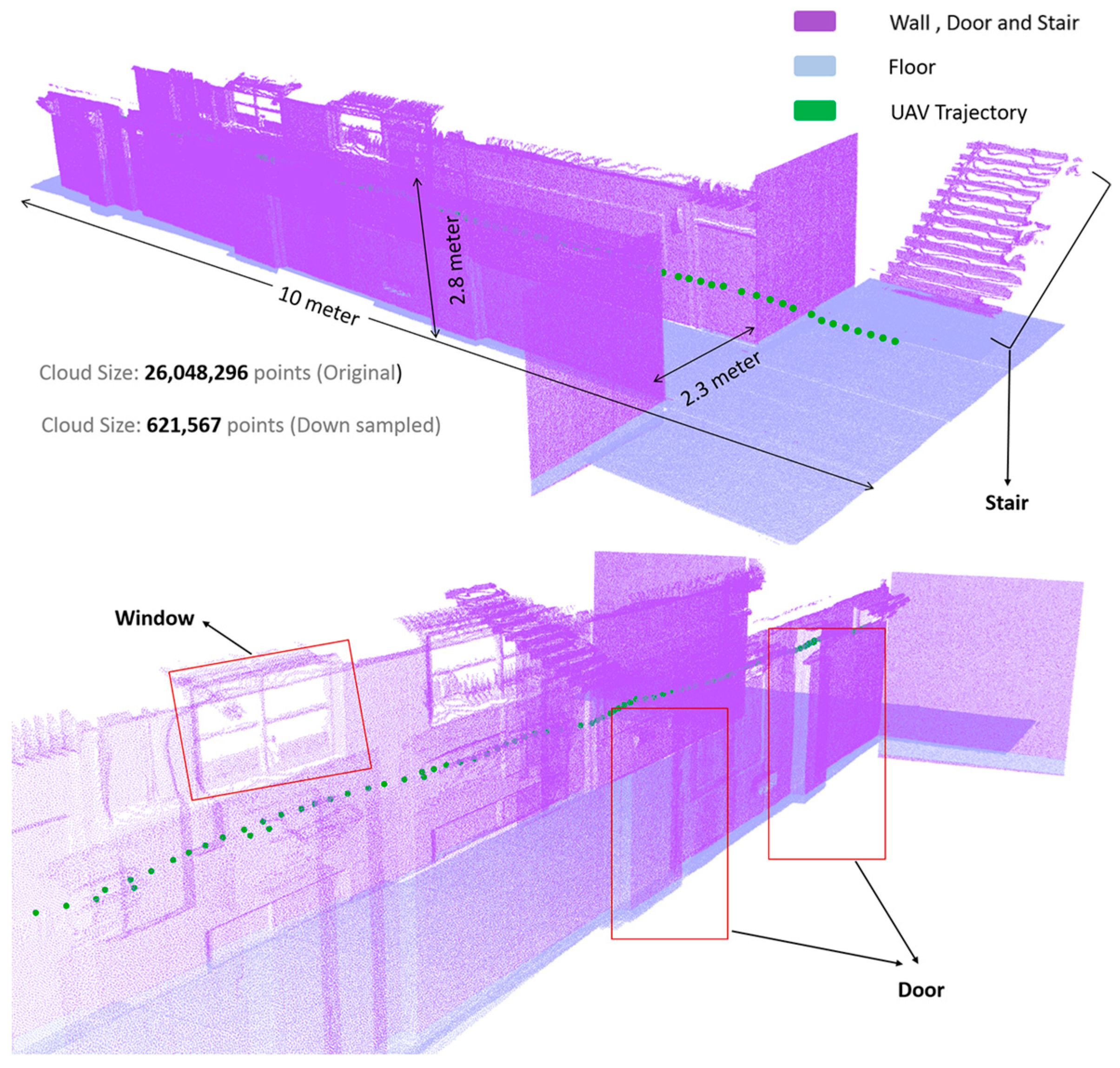
5.2. Indoor Navigation and Mapping
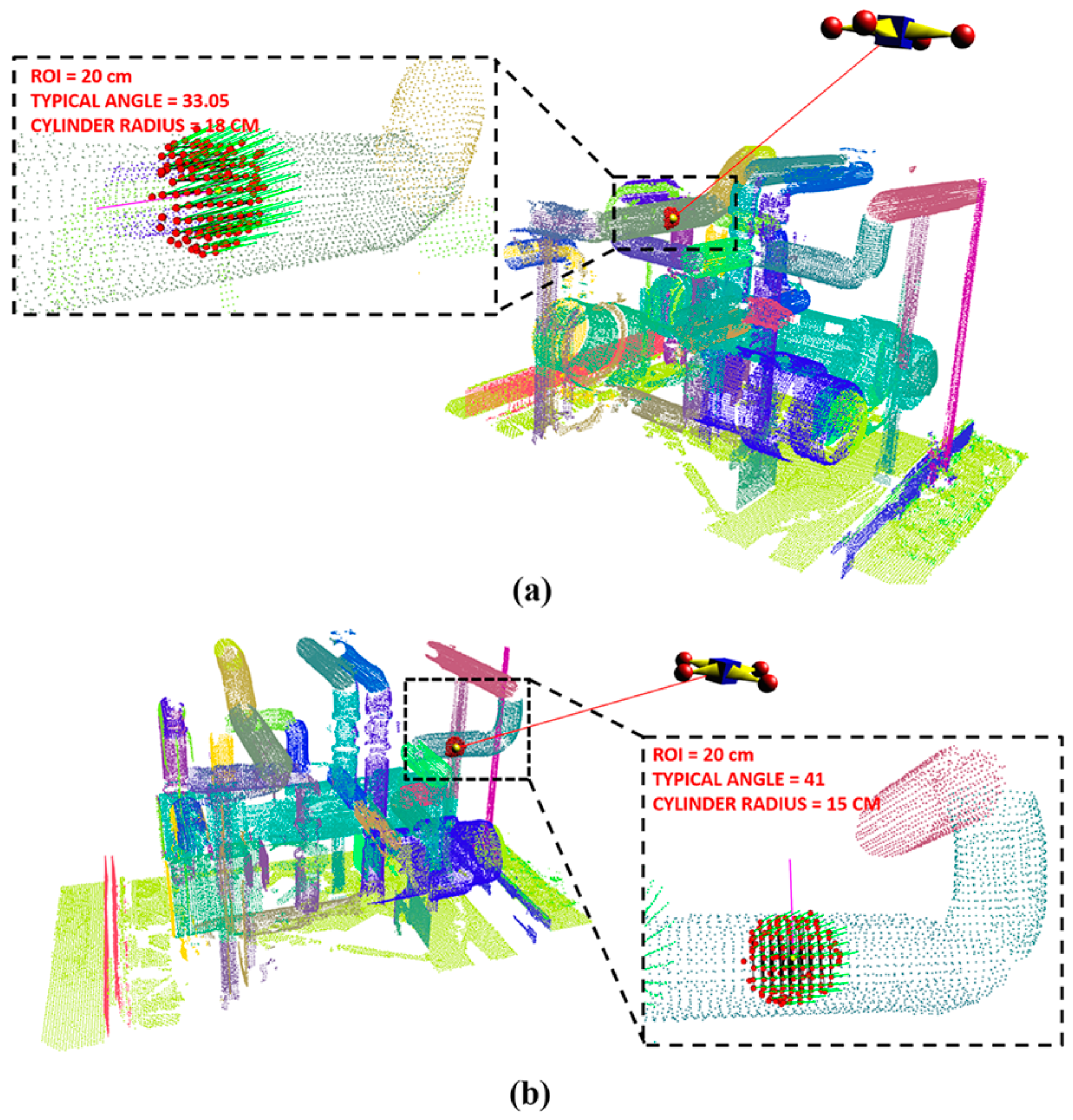
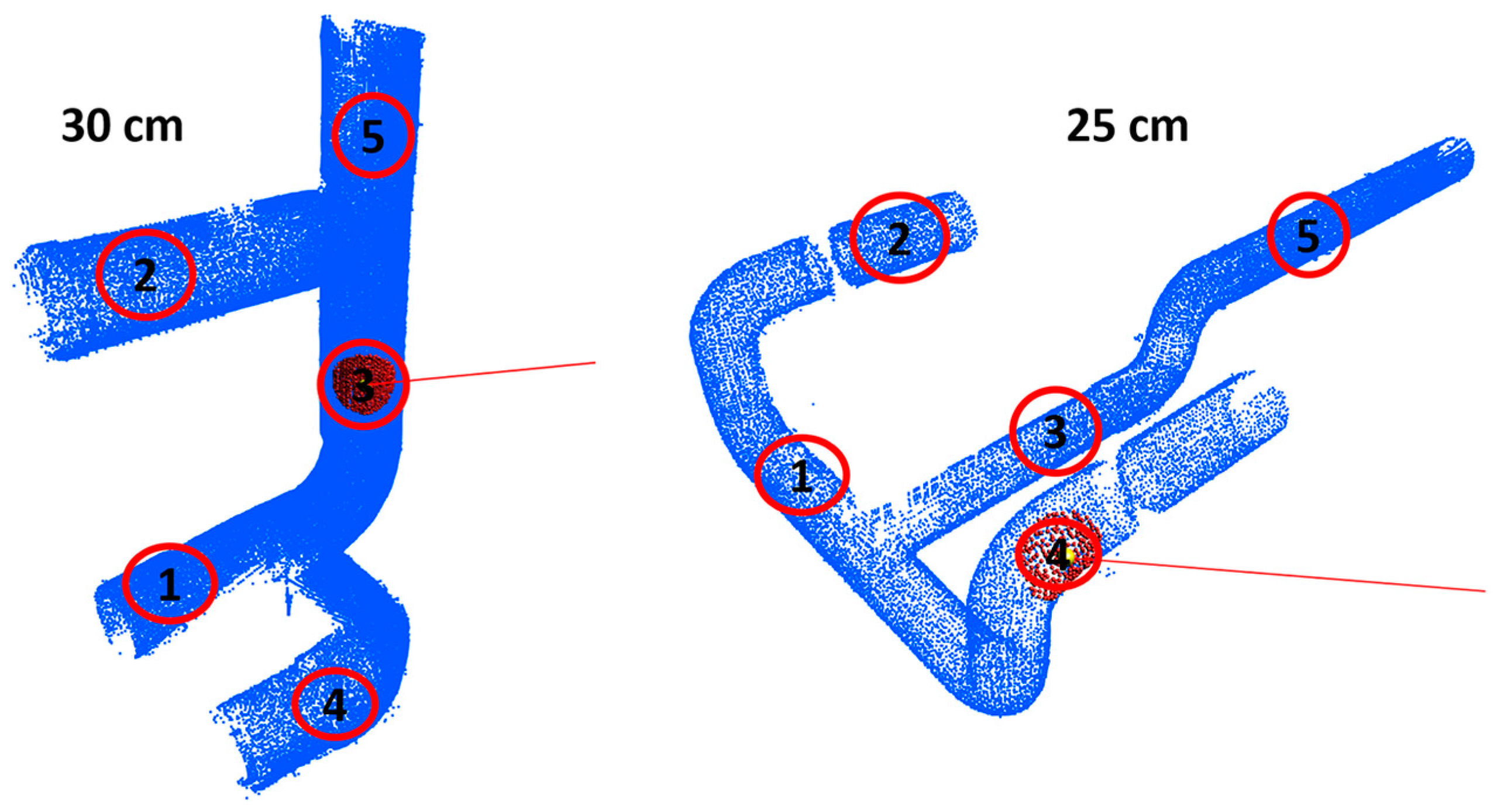
5.3 Pipeline Classification
5.4. Comparision and Accuracy Evaluation
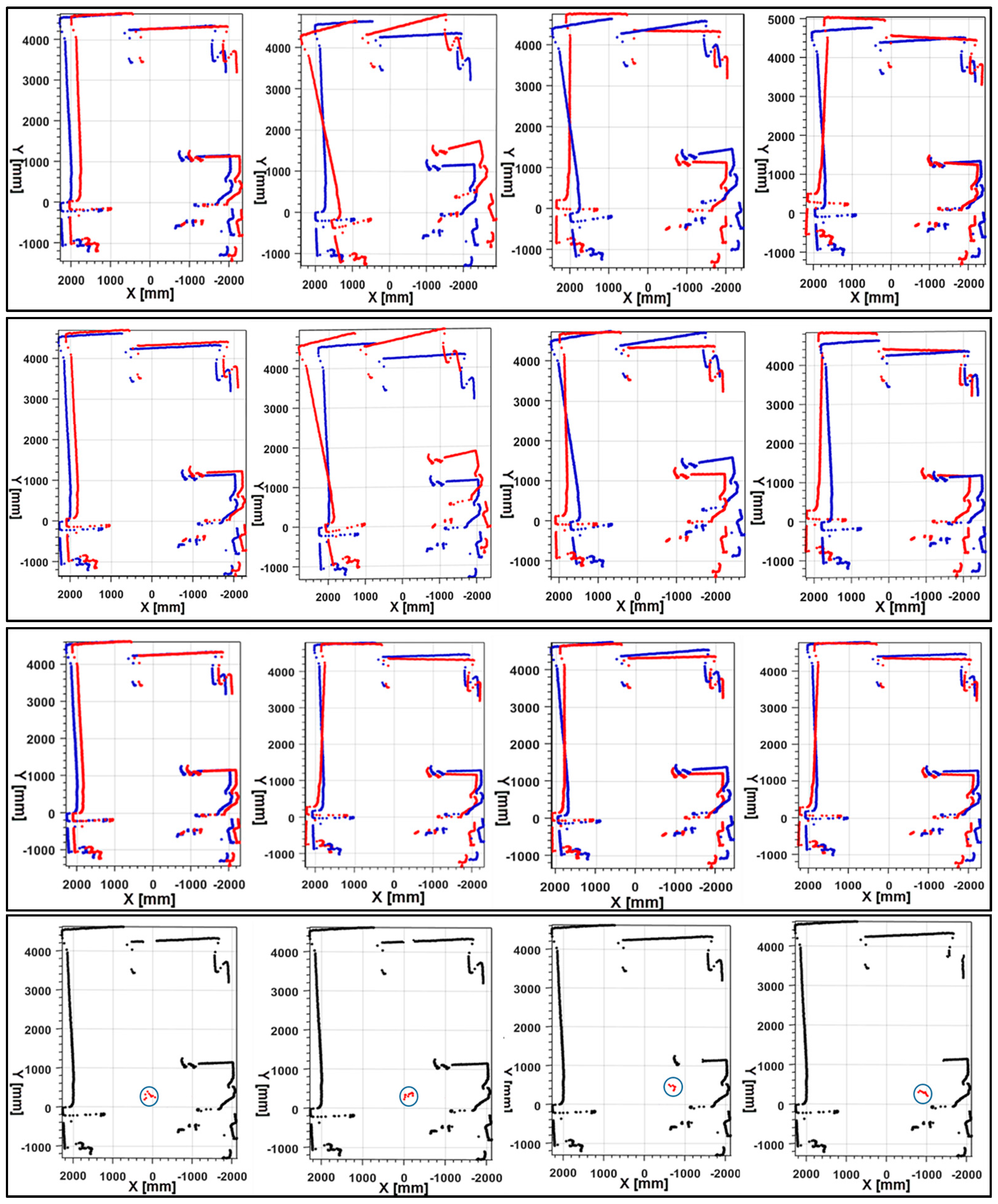
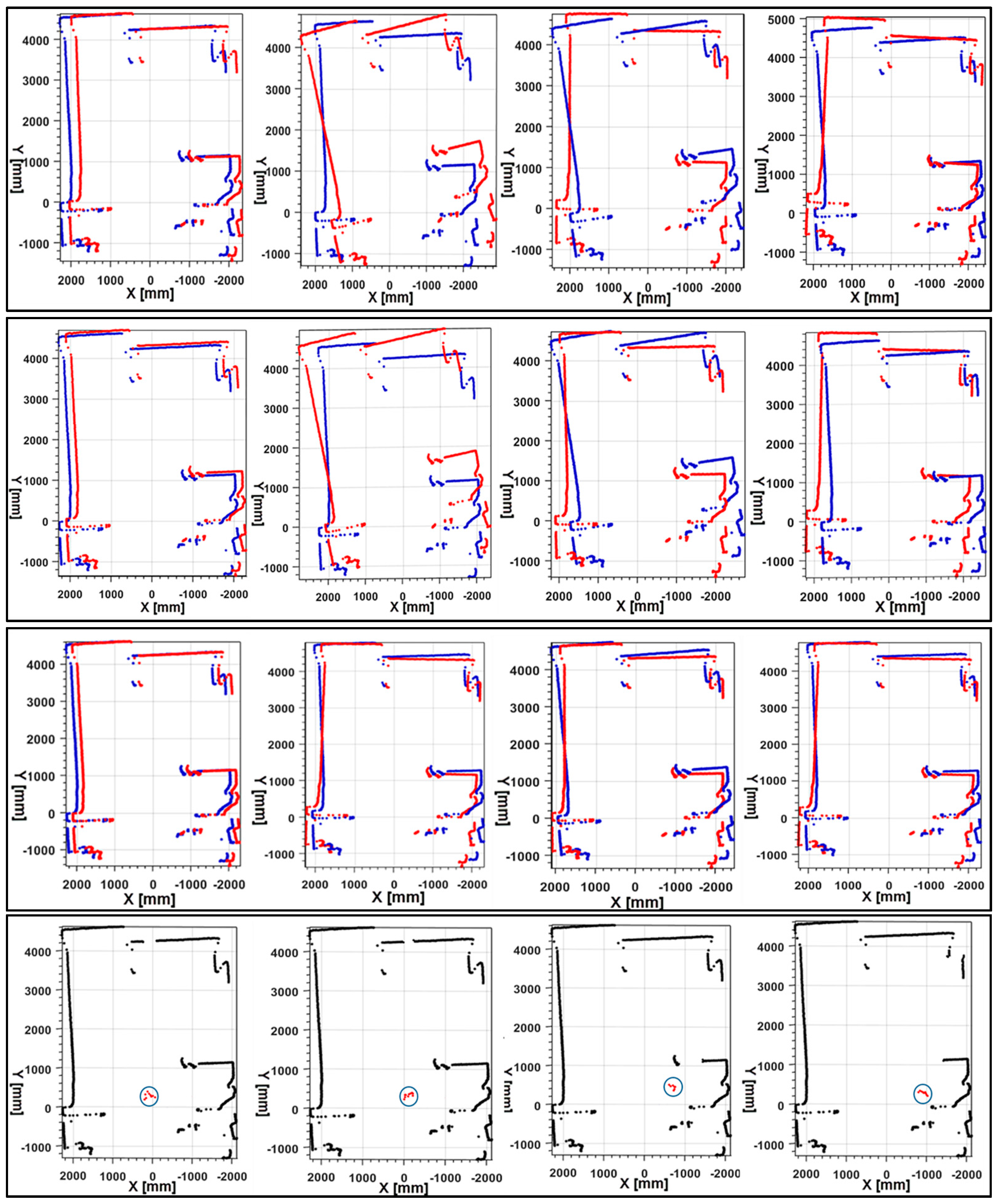
5.4.1. Accuracy of Scan Matching
5.4.2. Computational Time
5.4.3. Error Statistics Analysis
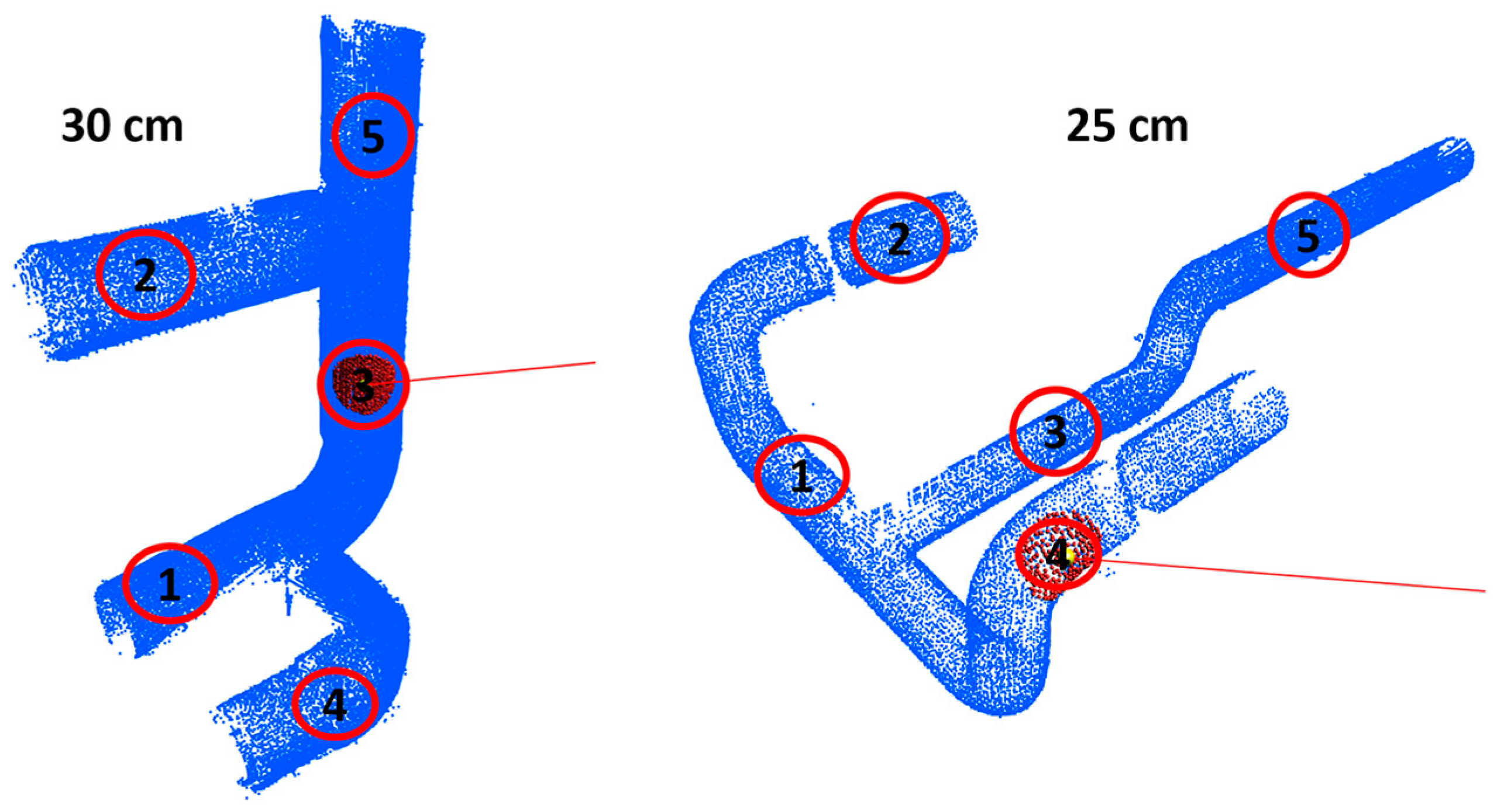
5.4.4. Accuracy analysis for Pipeline Classification
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zunino, G. Simultaneous Localization and Mapping for Navigation in Realistic Environments. Ph.D. Thesis, Royal Institue of Technology, Stockholm, Sweden, 2002. [Google Scholar]
- Sobers, M.; Chowdhary, G.; Johnson, E.N. Indoor navigation for unmanned aerial vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Li, J.; Zhong, R.; Hu, Q.; Ai, M. Feature-Based Laser Scan Matching and Its Application for Indoor Mapping. Sensors 2016, 16, 1265. [Google Scholar] [CrossRef] [PubMed]
- Konecny, J.; Prauzek, M.; Kromer, P.; Musilek, P. Novel Point-to-Point Scan Matching Algorithm Based on Cross-Correlation. Mob. Inf. Syst. 2016, 2016, 6463945. [Google Scholar] [CrossRef]
- Liu, S.; Atia, M.M.; Karamat, T.B.; Noureldin, A. A LiDAR-Aided Indoor Navigation System for UGVs. J. Navig. 2015, 68, 253–273. [Google Scholar] [CrossRef]
- Wang, F.; Wang, K.; Lai, S.; Phang, S.K.; Chen, B.M.; Lee, T.H. An efficient UAV navigation solution for confined but partially known indoor environments. In Proceedings of the 11th IEEE International Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 1351–1356. [Google Scholar]
- Li, R.; Liu, J.; Zhang, L.; Hang, Y. LIDAR/MEMS IMU integrated navigation (SLAM) method for a small UAV in indoor environments. In Proceedings of the Inertial Sensors and Systems Symposium (ISS), DGON, Karlsruhe, Germany, 16–17 September 2014; pp. 1–15. [Google Scholar]
- Liu, Y.; Zhang, H. Towards improving the efficiency of sequence-based SLAM. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 4–7 August 2013; pp. 1261–1266. [Google Scholar]
- Burguera, A.; Oliver, G.; Tardos, J.D. Robust scan matching localization using ultrasonic range finders. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1367–1372. [Google Scholar]
- Cox, I.J. Blanche-an experiment in guidance and navigation of an autonomous robot vehicle. IEEE Trans. Robot. Autom. 1991, 7, 193–204. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, J.; Xiang, Z. Scan matching based on CLS relationships. In Proceedings of the IEEE International Conference on Robotics, Intelligent Systems and Signal Processing, Changsha, China, 8–13 October 2003; pp. 99–104. [Google Scholar]
- Biber, P.; Straßer, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 2743–2748. [Google Scholar]
- Friedman, C.; Chopra, I.; Rand, O. Perimeter-based polar scan matching (PB-PSM) for 2D laser odometry. J. Intell. Robot. Syst. 2015, 80, 231–254. [Google Scholar] [CrossRef]
- Borges, G.A.; Aldon, M.J. A split-and-merge segmentation algorithm for line extraction in 2d range images. In Proceedings of the 15th International Conference on Pattern Recognition, Barcelona, Spain, 3–7 September 2000; Volume 1, pp. 441–444. [Google Scholar]
- Huang, J.; You, S. Detecting objects in scene point cloud: A combinational approach. In Proceedings of the 2013 International Conference on 3DTV-Conference, Seattle, WA, USA, 29 June–1 July 2013; pp. 175–182. [Google Scholar]
- Czerniawski, T.; Nahangi, M.; Haas, C.; Walbridge, S. Pipe spool recognition in cluttered point clouds using a curvature-based shape descriptor. Autom. Constr. 2016, 71, 346–358. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, C. 3D reconstruction of as-built industrial instrumentation models from laser-scan data and a 3D CAD database based on prior knowledge. Autom. Constr. 2015, 49, 193–200. [Google Scholar] [CrossRef]
- Diebel, J.; Reutersward, K.; Thrun, S.; Davis, J.; Gupta, R. Simultaneous localization and mapping with active stereo vision. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; Volume 4, pp. 3436–3443. [Google Scholar]
- Diosi, A.; Kleeman, L. Laser scan matching in polar coordinates with application to SLAM. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3317–3322. [Google Scholar]
- Paul, J.B.; Neil, D.M. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; Robotics-DL Tentative; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; pp. 586–606. [Google Scholar]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 19–23 May 2008; pp. 19–25. [Google Scholar]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef]
- Montesano, L.; Minguez, J.; Montano, L. Probabilistic scan matching for motion estimation in unstructured environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3499–3504. [Google Scholar]
- Fei, W.; Jin-Qiang, C.U.I.; Ben-Mei, C.H.E.N.; Tong, H.L. A comprehensive UAV indoor navigation system based on vision optical flow and laser FastSLAM. Acta Autom. Sin. 2013, 39, 1889–1899. [Google Scholar]
- Bachrach, A.; He, R.; Roy, N. Autonomous flight in Unknown Indoor Environments. Int. J. Micro Air Veh. 2009, 1, 217–228. [Google Scholar] [CrossRef]
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A Complementary filter for attitude estimation of fixed-wing UAV. In Proceedings of the IEEE/SJ International Conference on Intelligent Robotos and Systems IROS, Nice, France, 22–26 September 2008; pp. 340–345. [Google Scholar]
- Chintalapalli, H.R.; Patil, S.; Nam, S.; Park, S.; Chai, Y.H. 6DOF wireless tracking wand using MARG and vision sensor fusion. Int. J. Distrib. Sens. Netw. 2014, 10, 864768. [Google Scholar] [CrossRef]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M.; Savvaris, A. LiDAR-inertial integration for UAV localization and mapping in complex environments. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 649–656. [Google Scholar]
- Romaniuk, S.; Gosiewski, Z. Kalman filter realization for orientation and position estimation on dedicated processor. Acta Mech. Autom. 2014, 8, 88–94. [Google Scholar] [CrossRef]
- Revelles, J.; Urena, C.; Lastra, M. An efficient parametric algorithm for octree traversal. J. WSCG 2000, 8, 212–219. [Google Scholar]
- Line and Segment Intersections. Available online: http://geomalgorithms.com/a05-_intersect-1.html (accessed on 27 March 2017).
- Aldoma, A.; Marton, Z.C.; Tombari, F.; Wohlkinger, W.; Potthast, C.; Zeisl, B.; Rusu, R.B.; Gedikli, S.; Vincze, M. Point cloud library. IEEE Robot. Autom. Mag. 2012, 19, 80–91. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Beetz, M. Persistent point feature histograms for 3D point clouds. In Intelligent Autonomous Systems (IAS-10); IOS Press: Baden-Baden, Germany, 2008; pp. 119–128. [Google Scholar]
- Patil, A.K.; Holi, P.; Lee, S.K.; Chai, Y.H. An adaptive approach for the reconstruction and modeling of as-built 3D pipelines from point clouds. Autom. Constr. 2017, 75, 65–78. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ROI (cm) | Typical Angle Range | |||
|---|---|---|---|---|
| 30 cm Pipe | 25 cm Pipe | 18 cm Pipe | 15 cm Pipe | |
| 10 | 7°~10° | 11°~13° | 16°~28° | 18°~25° |
| 20 | 16°~19° | 20°~25° | 30°~38° | 40°~54° |
| 30 | 31°~37° | 37°~41° | 40°~59° | - |
| Scans | Scan Pair1 | Scan Pair 2 | Scan Pair 3 | Scan Pair 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | LiDAR | IMU | LiDAR | IMU | LiDAR | IMU | LiDAR | IMU | ||||
| tx/cm | tz/cm | /rad | tx/cm | tz/cm | /rad | tx/cm | tz/cm | /rad | tx/cm | tz/cm | /rad | |
| ICP | 28.82 | 12.71 | 0.52 | 15.33 | 18.82 | 1.02 | 8.24 | 9.42 | 1.36 | 14.23 | 13.56 | 0.95 |
| PSM | 24.12 | 10.46 | 0.53 | 8.96 | 15.42 | 1.03 | 6.22 | 7.98 | 1.46 | 12.54 | 11.32 | 1.02 |
| Proposed | 16.48 | 7.32 | 0.48 | 9.51 | 10.43 | 1.01 | 3.88 | 8.97 | 1.49 | 11.03 | 7.58 | 0.97 |
| Gound truth | 18.60 | 6.83 | 0.5 | 12.12 | 13.11 | 1.0 | 5.96 | 11.04 | 1.5 | 10.24 | 8.95 | 1.0 |
| Methods | 180/ms | 360/ms | 720/ms | 1080/ms |
|---|---|---|---|---|
| ICP | 23 | 87 | 312 | 463 |
| PSM | 9 | 17 | 31 | 56 |
| Proposed | 2 | 5 | 11 | 16 |
| Method | Data | RMS Error | Mean Error | Maximum Error |
|---|---|---|---|---|
| LiDAR | X | 0.001 | 0.004 | 0.012 |
| Y | 0.000 | 0.000 | 0.000 | |
| Z | 0.003 | 0.006 | 0.015 | |
| Heading | 0.000(deg) | 0.000(deg) | 0.000(deg) | |
| IMU + LiDAR | X | 0.004 | 0.018 | 0.024 |
| Y | 0.000 | 0.000 | 0.000 | |
| Z | 0.013 | 0.018 | 0.027 | |
| Heading | 0.058(deg) | 0.066(deg) | 0.116(deg) |
| Method | Data | RMS Error | Mean Error | Maximum Error |
|---|---|---|---|---|
| LiDAR | X | 0.356 | 0.528 | 1.312 |
| Y | 0 | 0 | 0 | |
| Z | 0.258 | 0.624 | 2.014 | |
| Heading | 0.124(deg) | 0.523(deg) | 0.339(deg) | |
| IMU + LiDAR | X | 0.008 | 0.010 | 0.016 |
| Y | 0 | 0 | 0 | |
| Z | 0.0132 | 0.089 | 0.195 | |
| Heading | 0.023(deg) | 0.015(deg) | 0.042(deg) |
| ROI | GR | Measured Typical Angle/Radius | Fr | Pr | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||||
| 10 | 30 cm | 8.13/30 | 6.54/NR | 7.38/30 | 11.02/25 | 9.78/30 | 0.4 | 0.6 |
| 20 | 17.08/30 | 18.37/30 | 20.52/25 | 18.49/30 | 16.84/30 | 0.2 | 0.8 | |
| 30 | 33.24/30 | 36.88/30 | 34.53/30 | 30.64/NR | 32.67/30 | 0.2 | 0.8 | |
| 10 | 25 cm | 11.52/25 | 11.86/25 | 13.63/25 | 10.02/30 | 10.89/30 | 0.4 | 0.6 |
| 20 | 21.18/25 | 22.00/25 | 21.33/25 | 23.21/25 | 19.47/18 | 0.2 | 0.8 | |
| 30 | 39.14/25 | 37.63/25 | 40.16/18 | 37.81/25 | 37.19/25 | 0.2 | 0.8 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, G.A.; Patil, A.K.; Patil, R.; Park, S.S.; Chai, Y.H. A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification. Sensors 2017, 17, 1268. https://doi.org/10.3390/s17061268
Kumar GA, Patil AK, Patil R, Park SS, Chai YH. A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification. Sensors. 2017; 17(6):1268. https://doi.org/10.3390/s17061268
Chicago/Turabian StyleKumar, G. Ajay, Ashok Kumar Patil, Rekha Patil, Seong Sill Park, and Young Ho Chai. 2017. "A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification" Sensors 17, no. 6: 1268. https://doi.org/10.3390/s17061268
APA StyleKumar, G. A., Patil, A. K., Patil, R., Park, S. S., & Chai, Y. H. (2017). A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification. Sensors, 17(6), 1268. https://doi.org/10.3390/s17061268