
Shadow-Based Vehicle Detection in Urban Traffic

Abstract
:1. Introduction
2. Related Work
3. Hypotheses Generation Method
3.1. Searching Image Region
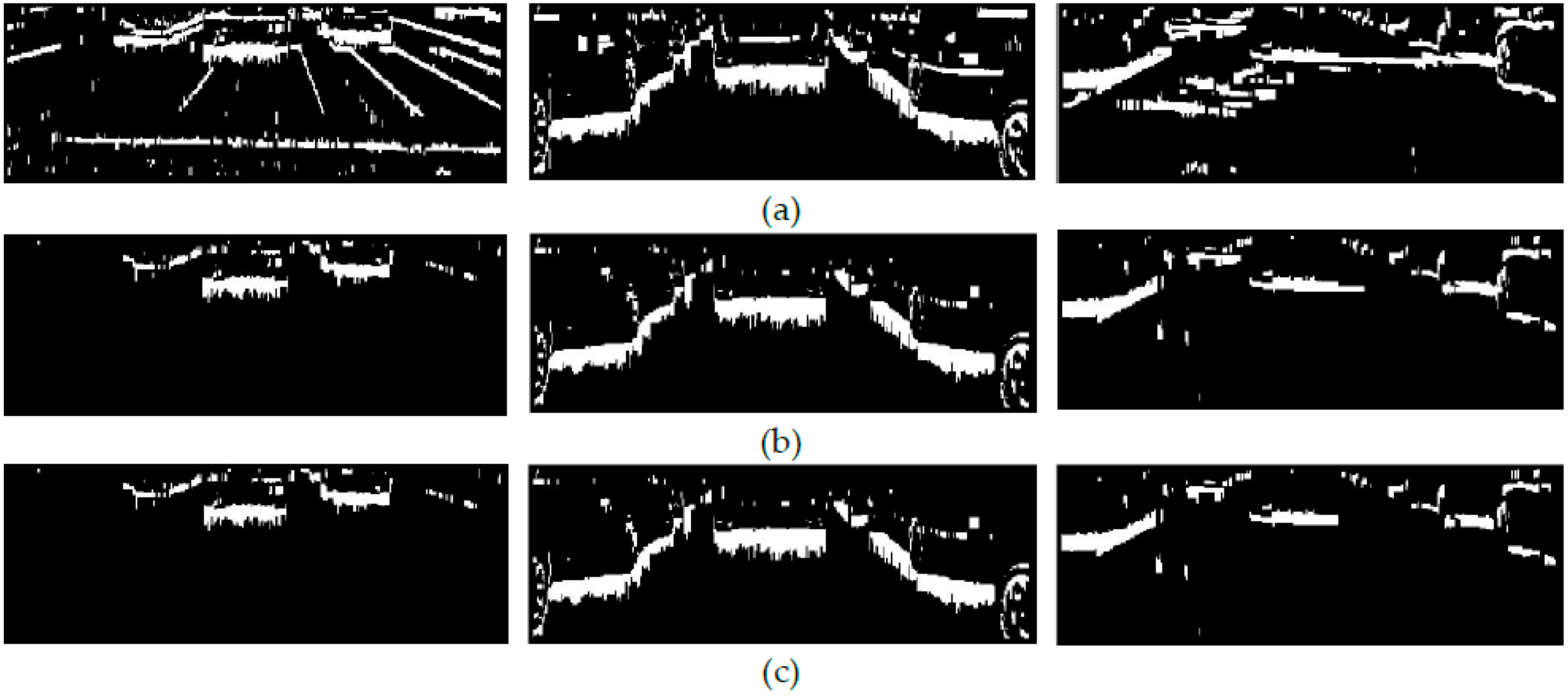
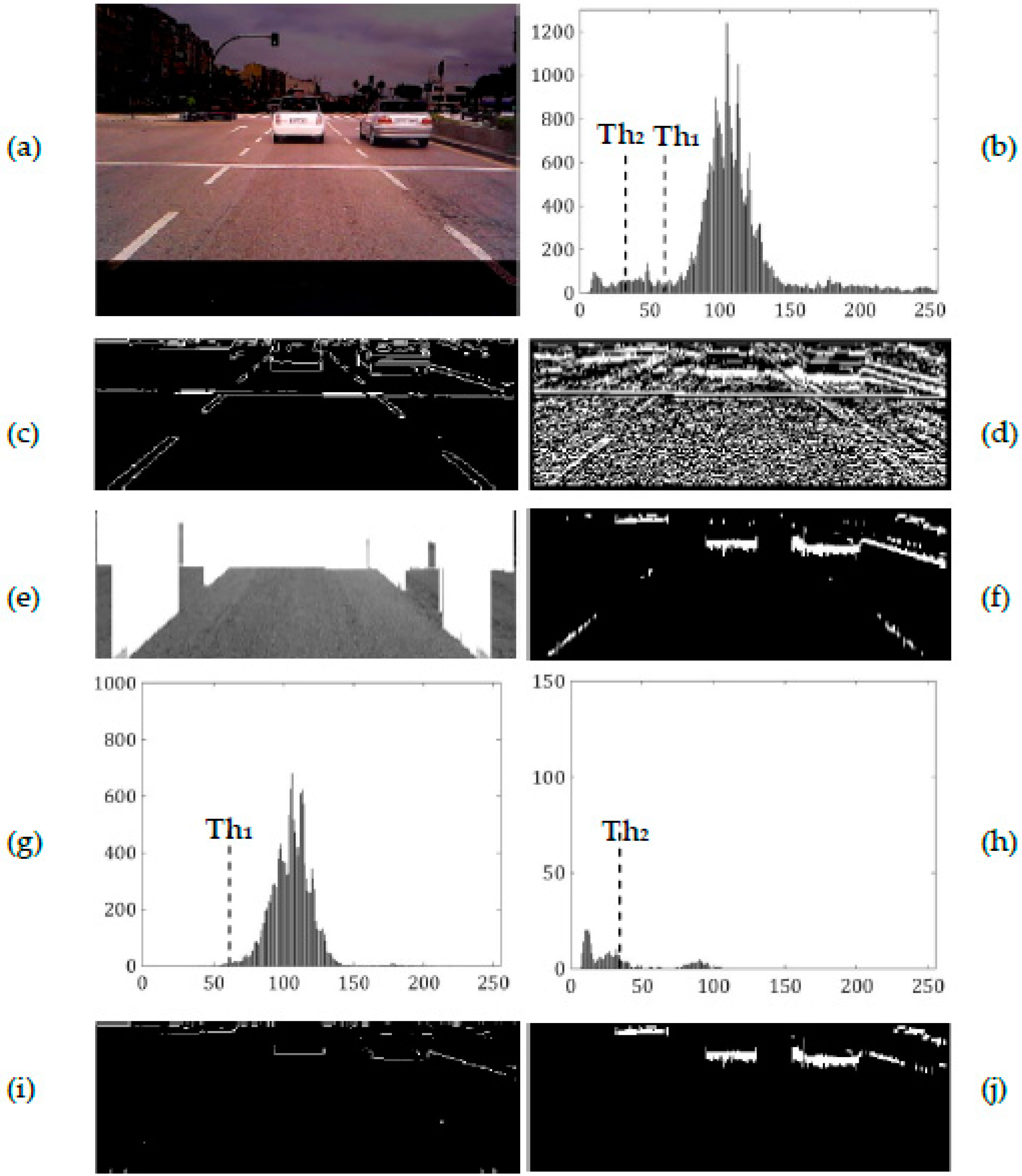
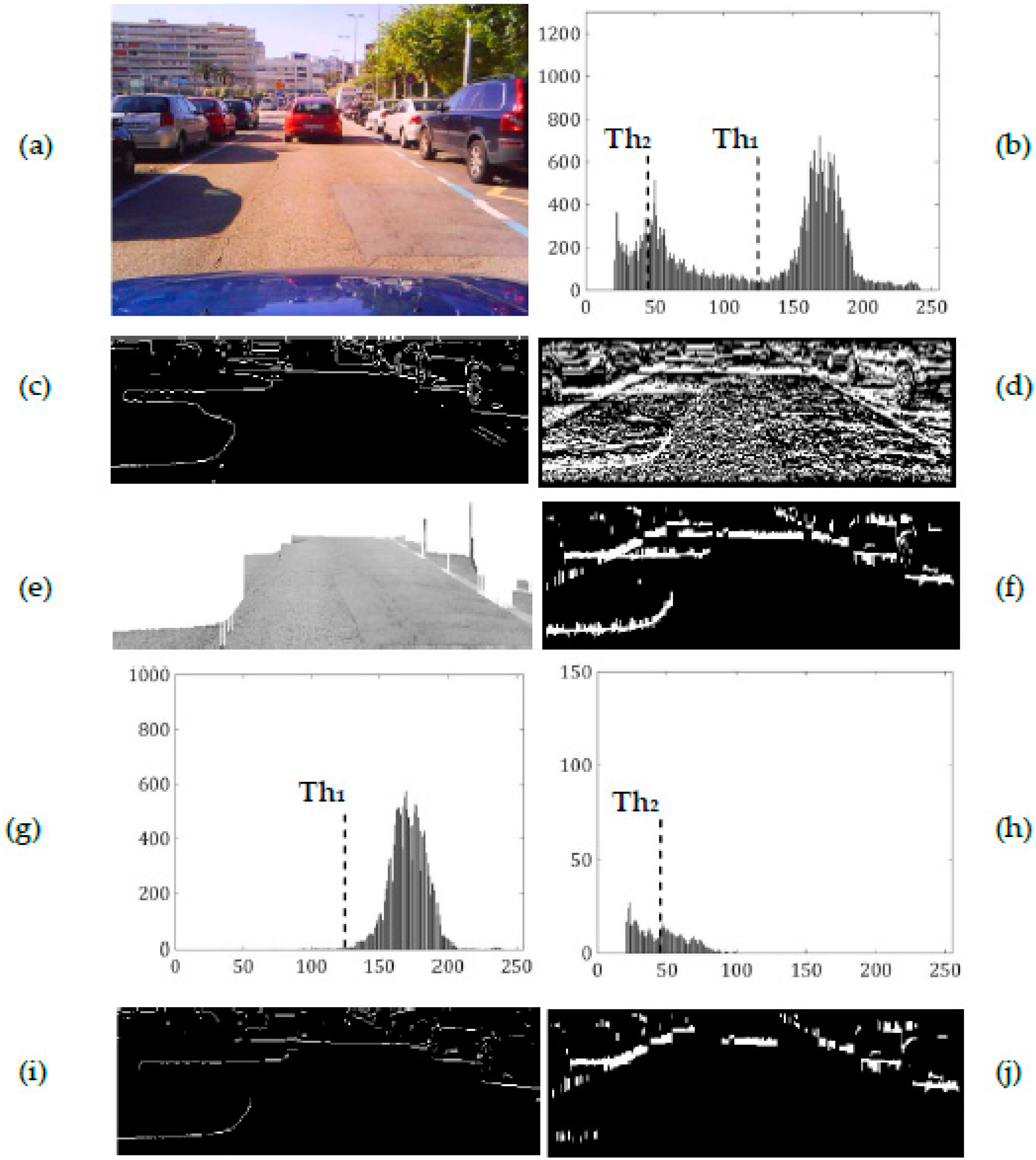
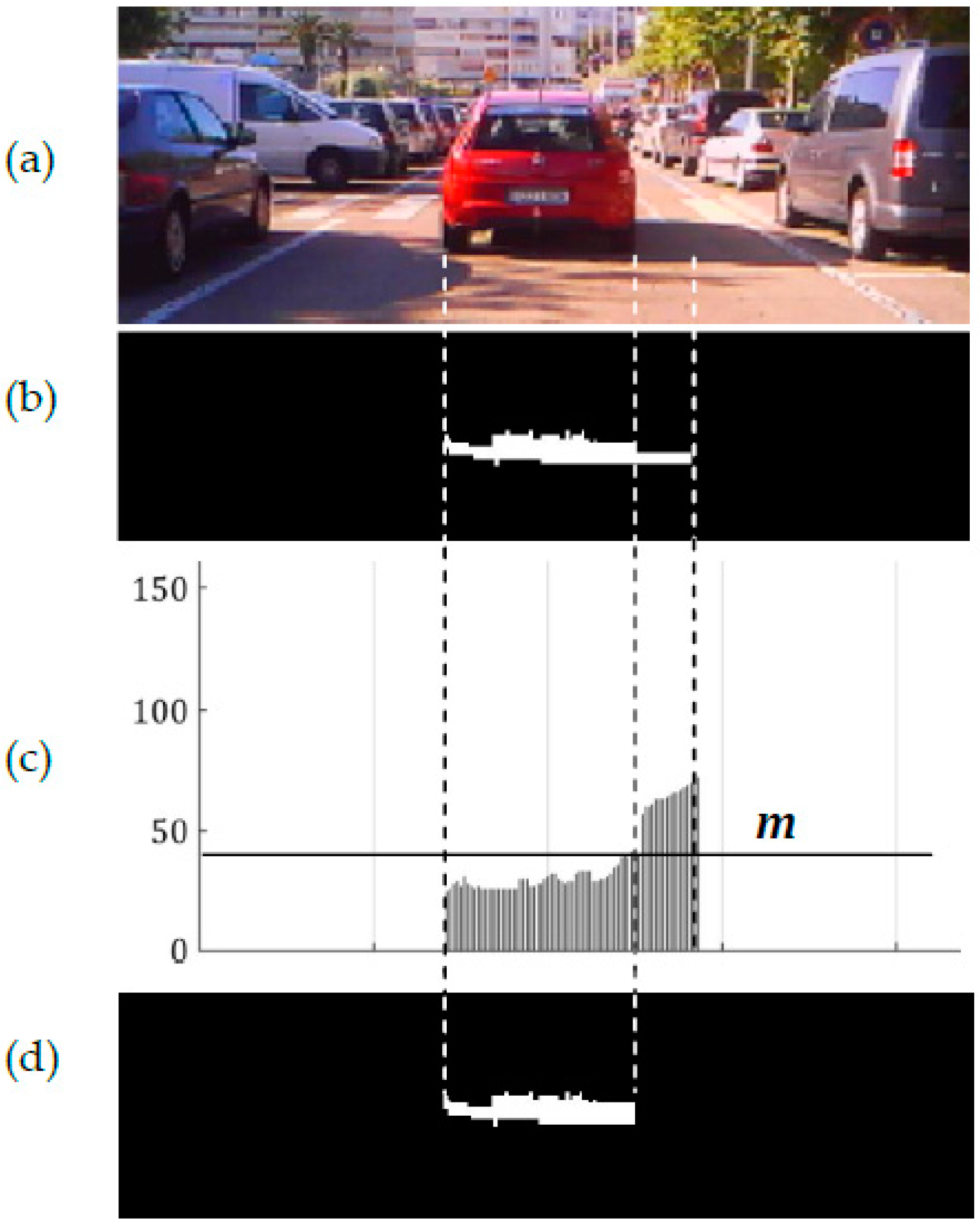
3.2. Vertical Intensity Gradients of Shadow
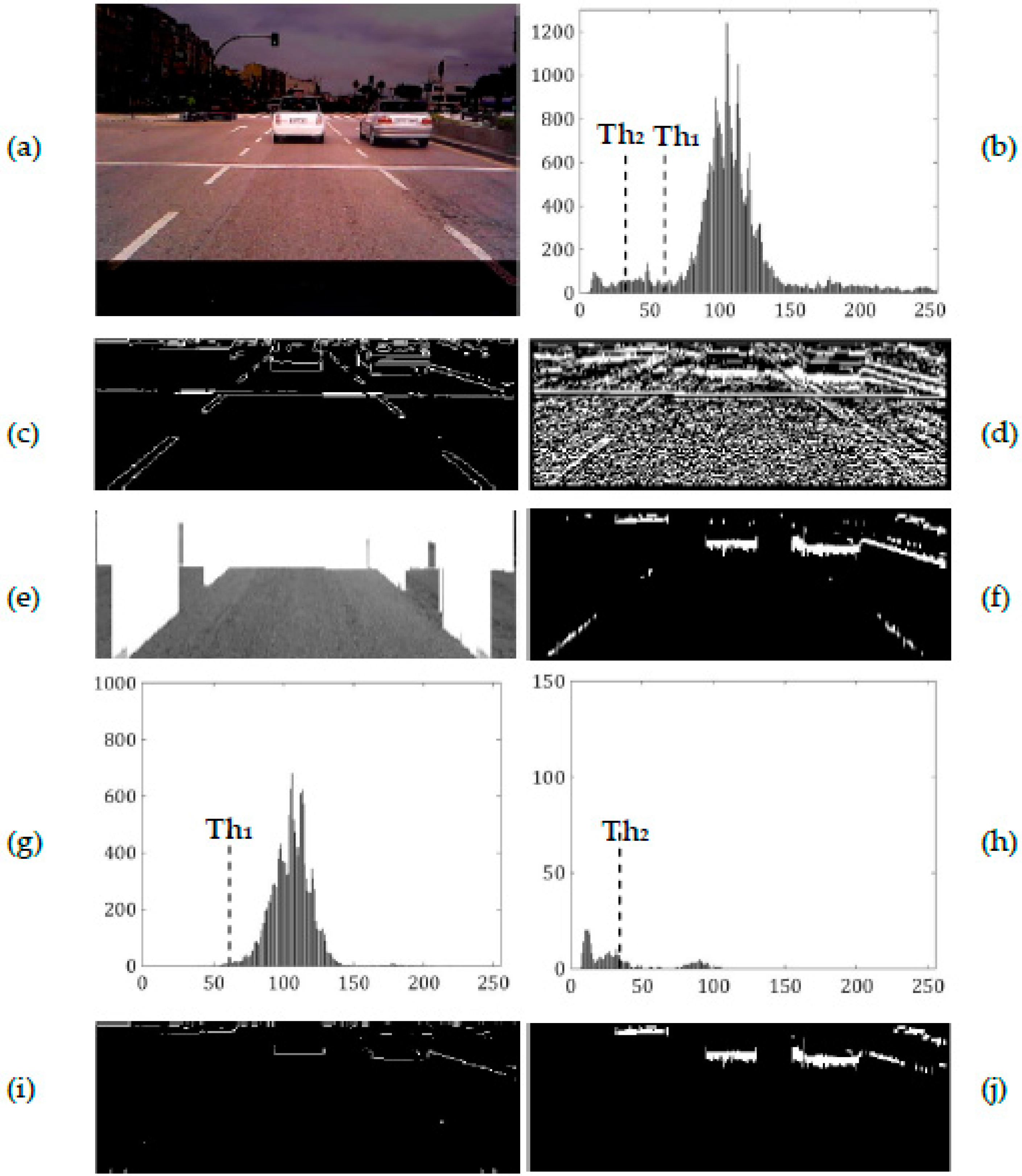
3.3. Intensity Threshold for Shadow
- The shadow is darker than the road illuminated by ambient light, and thus darker than the upper pixels of the gradients due to lane markings, asphalt noise and lateral shadows.
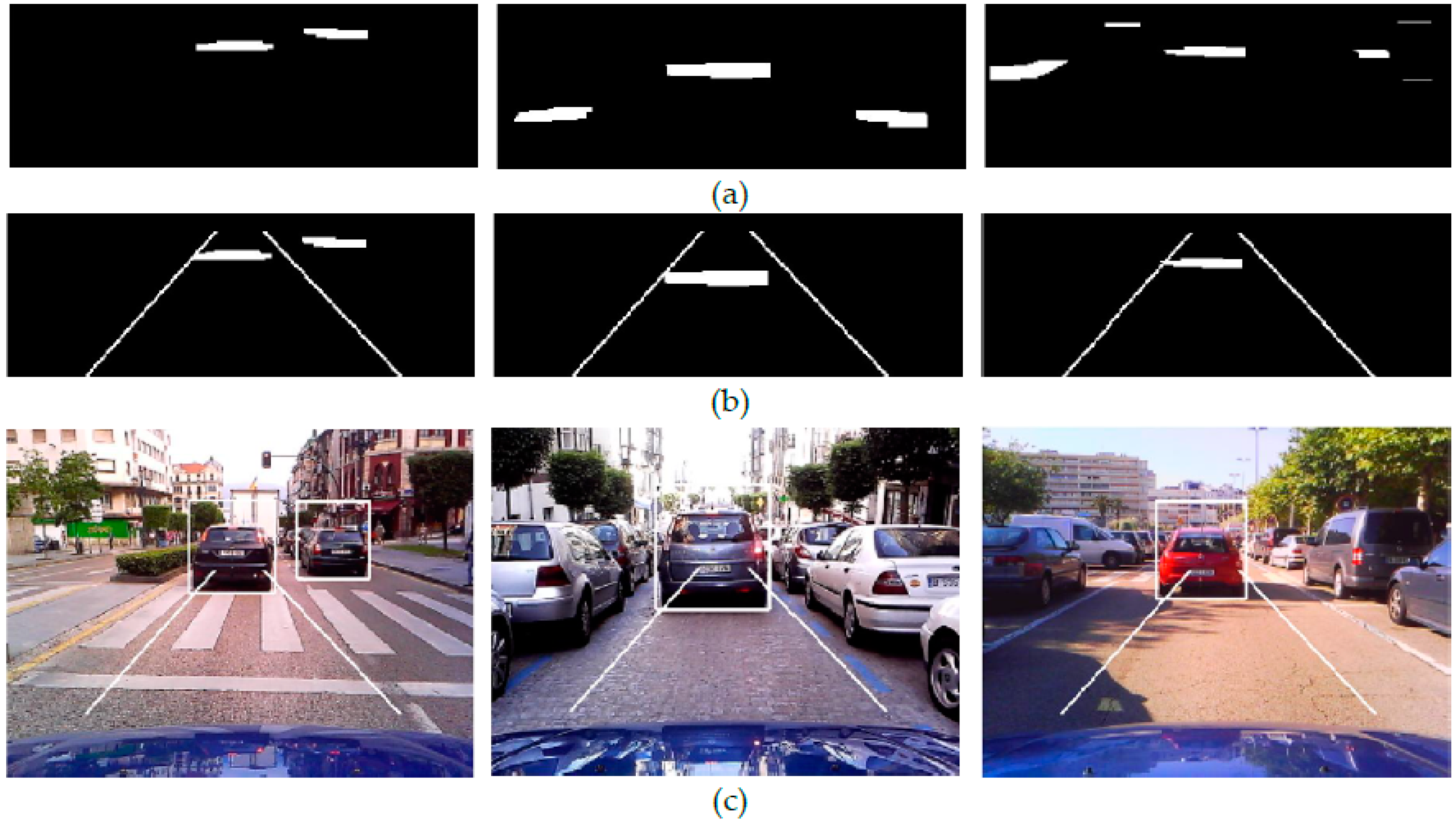
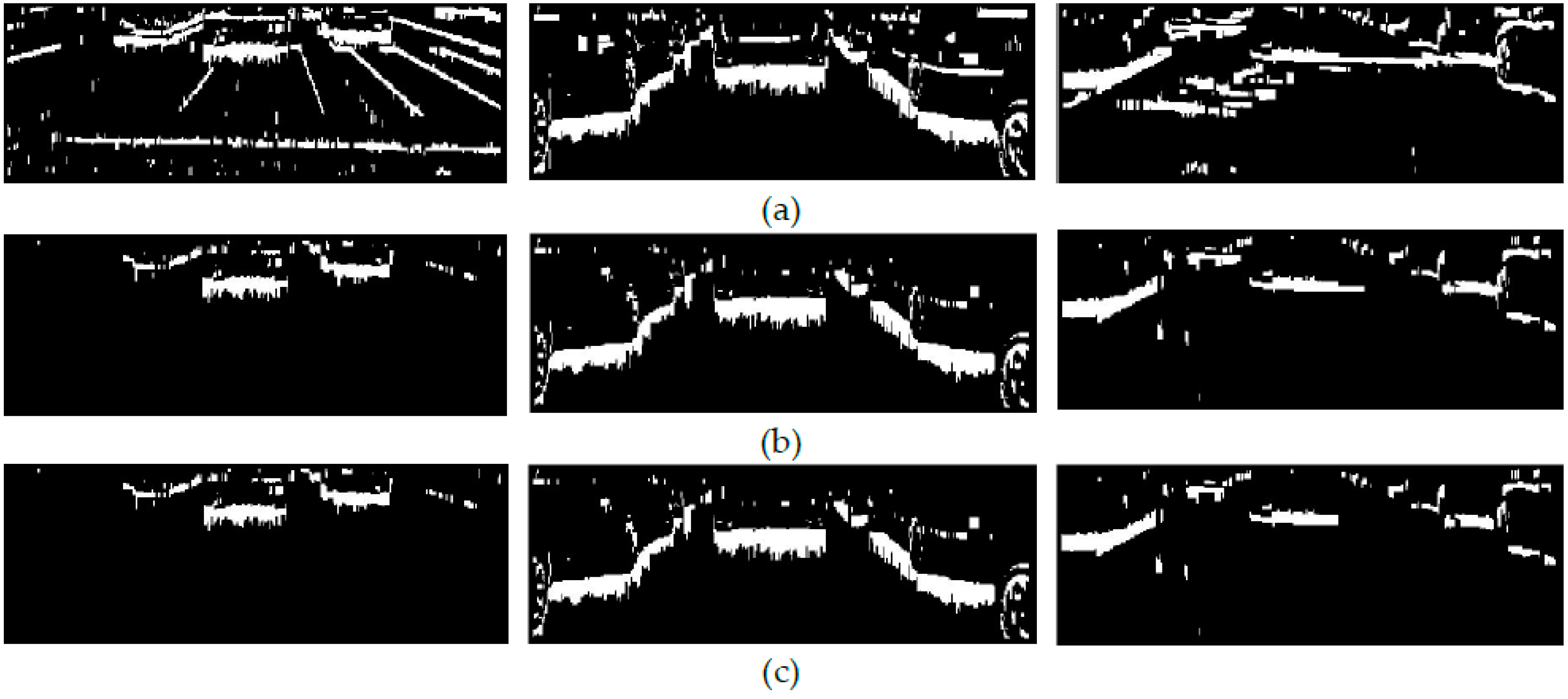
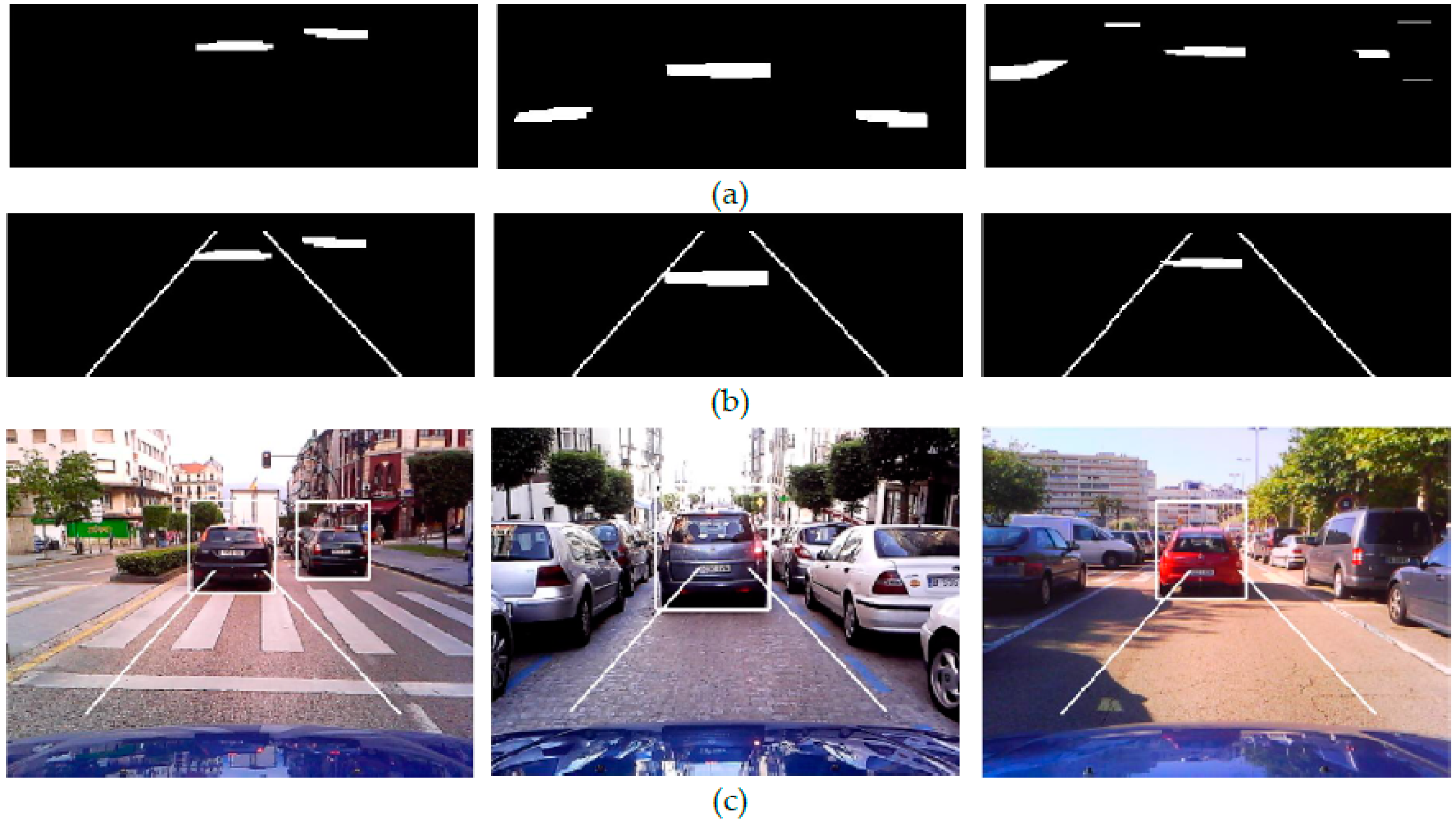
3.4. Morphological Filter and Region of Interest
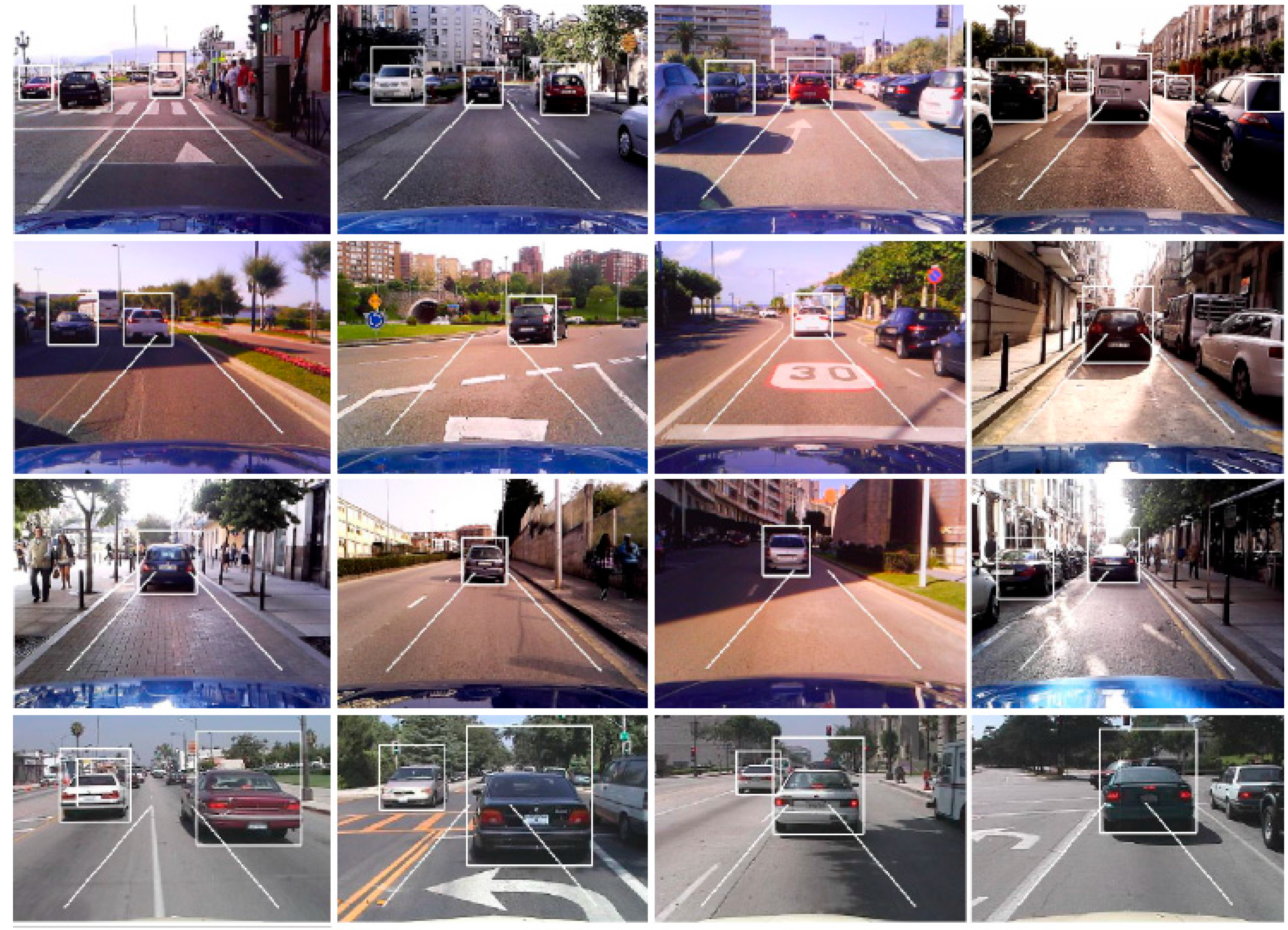
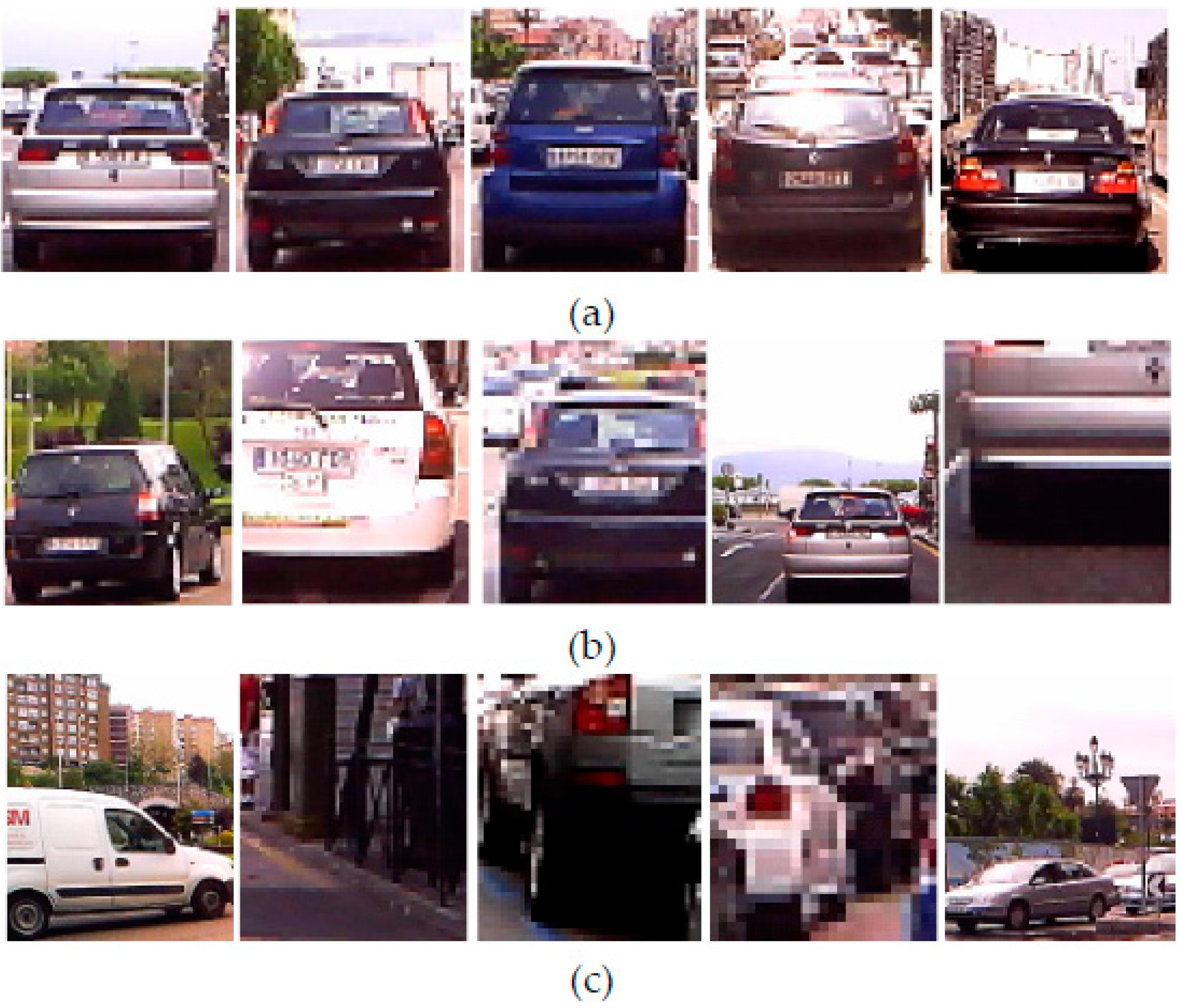
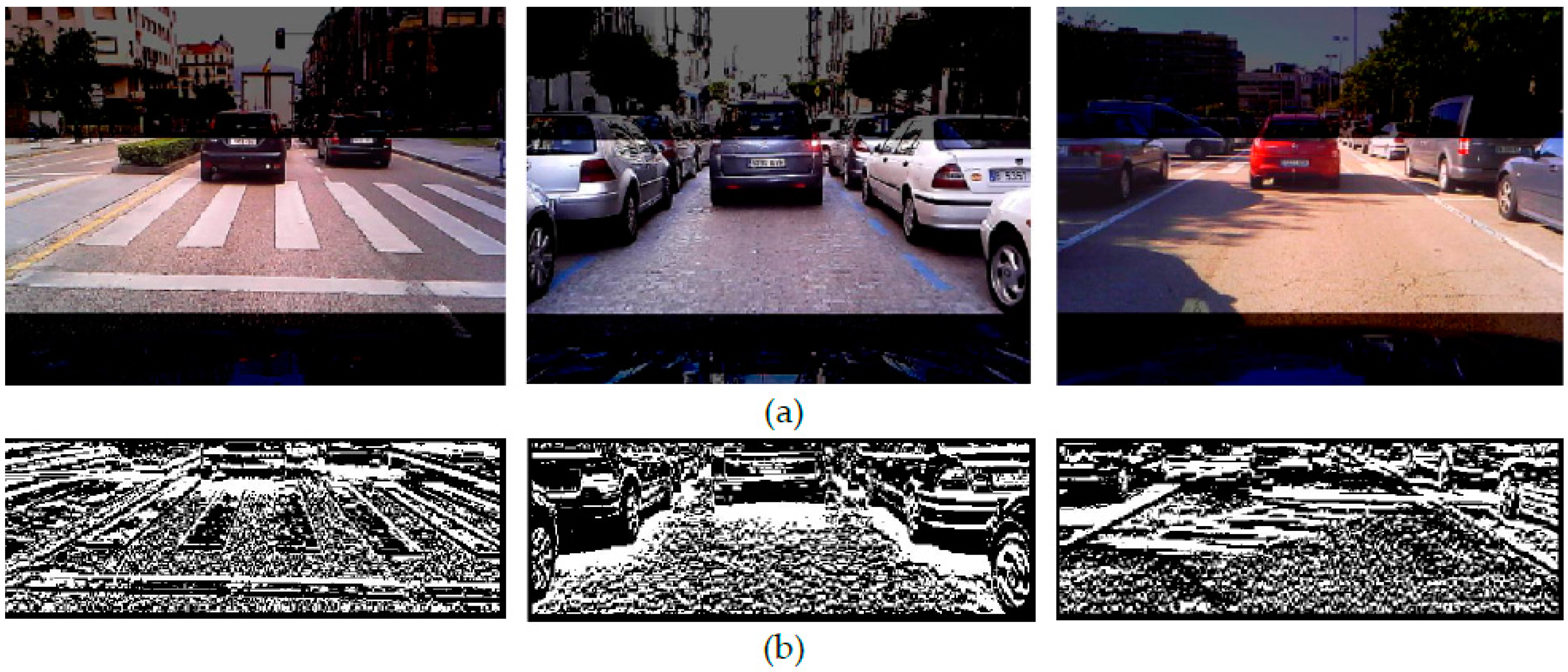
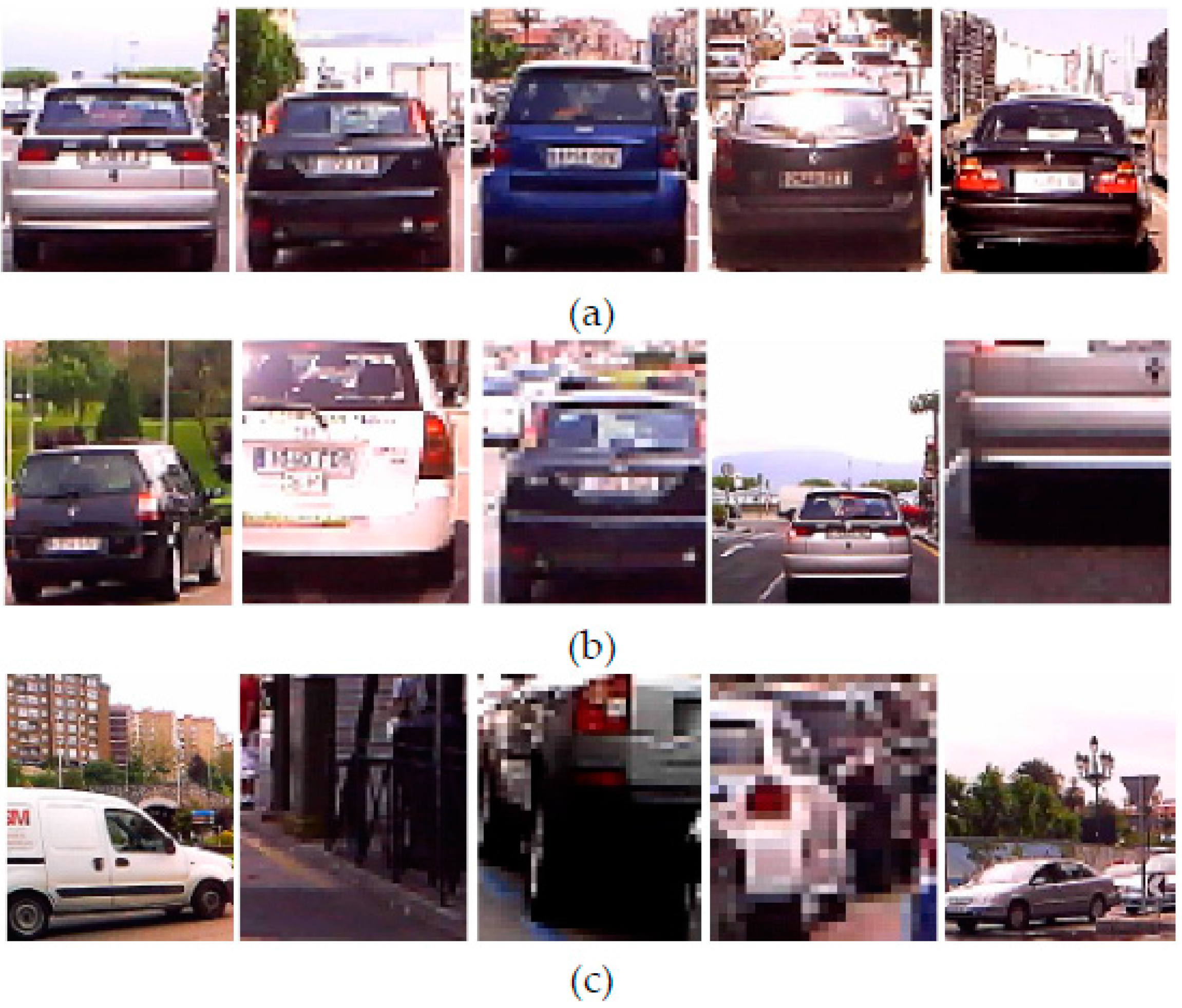
4. Experimental Results
5. Conclusions
- Gradients ensure the detection of gradual shadow boundaries whose edge detection can easily fail, thus minimizing the number of missed vehicles.
- Gradients enclose the penumbra of shadows. Thus, pixel properties comparison avoids pixels in penumbra which is partially illuminated by ambient light.
- The upper pixels of gradients correspond to the bottom of the vehicle making a more accurate framing of its rear especially on sunny days when the sun is in front and the vehicle cast a rear lateral shadow.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, Z.; Bebis, G.; Miller, R. On-road vehicle detection: A review. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 694–711. [Google Scholar] [PubMed]
- Bertozzi, M.; Broggi, A. GOLD: A Parallel Real-Time Stereo Vision System for Generic Obstacle and Lane Detection. IEEE Trans. Image Process. 1998, 7, 62–81. [Google Scholar] [CrossRef] [PubMed]
- Nedevschi, S.; Danescu, R.; Marita, T.; Oniga, F.; Pocol, C.; Sobol, S.; Tomiuc, X.; Vancea, C.; Meinecke, M.M.; Graf, T.; et al. A Sensor for Urban Driving Assistance Systems Based on Dense Stereovision. In Proceedings of the IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 276–283. [Google Scholar]
- Broggi, A.; Cerri, P.; Debattisti, S.; Laghi, M.C.; Medici, P.; Panciroli, M.; Prioletti, A. PROUD-public road urban driverless test: Architecture and result. In Proceedings of the IEEE Intelligent Vehicles Symposium 2014, Dearborn, MI, USA, 8–11 June 2014; pp. 648–654. [Google Scholar]
- Michalke, T.; Stein, F.; Franke, U. Towards a closer fusion of active and passive safety: Optical flow-based detection of vehicle side collisions. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Stuttgart, Germany, 5–9 June 2011; pp. 181–188. [Google Scholar]
- Li, Y.; Liu, Y.; Su, Y.; Hua, G.; Zheng, N. Three-Dimensional Traffic Scenes Simulation from Road Image Sequences. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1121–1134. [Google Scholar] [CrossRef]
- Parodi, P.; Piccioli, G. A feature-based recognition scheme for traffic scenes. In Proceedings of the Intelligent Vehicles ’95 Symposium, Detroit, MI, USA, 25–26 September 1995; pp. 229–234. [Google Scholar]
- Tsai, W.K.; Wu, S.L.; Lin, L.J.; Chen, T.M.; Li, M.H. Edge-based Forward Vehicle Detection Method for Complex Scenes. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE-TW), Taipei, Taiwan, 26–28 May 2014; pp. 173–174. [Google Scholar]
- Llorca, D.F.; Sánchez, S.; Ocaña, M.; Sotelo, M.A. Vision-Based Traffic Data Collection Sensor for Automotive Applications. Sensors 2010, 10, 860–875. [Google Scholar] [CrossRef] [PubMed]
- Satzoda, R.K.; Trivedi, M.M. Multipart Vehicle Detection Using Symmetry-Derived Analysis and Active Learning. IEEE Trans. Intell. Transp. Sys. 2016, 17, 926–937. [Google Scholar] [CrossRef]
- Peiqun, L.; Jianmin, X.; Jianyong, B. Robust Vehicle detection in vision systems based on fast wavelet transform and texture analysis. In Proceedings of the IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 2958–2963. [Google Scholar]
- Creusot, C.; Munawar, A. Real-time small obstacle detection on highways using compressive RBM road reconstruction. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 162–167. [Google Scholar]
- Guo, D.; Fraichard, T.; Xie, M.; Laugier, C. Color modelling by spherical influence field in sensing driving environment. In Proceedings of the IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 3–5 October 2000; pp. 249–254. [Google Scholar]
- Chen, H.T.; Wu, Y.C.; Hsu, C.C. Daytime Preceding Vehicle Brake Light Detection Using Monocular Vision. IEEE Sens. J. 2016, 16, 120–131. [Google Scholar] [CrossRef]
- O’Malley, R.; Jones, E.; Glavin, M. Rear-Lamp Vehicle Detection and Tracking in Low-Exposure Color Video for Night Conditions. IEEE Trans. Intell. Transp. Syst. 2010, 11, 453–462. [Google Scholar] [CrossRef]
- Kosaka, N.; Ohashi, G. Vision-Based Nighttime Vehicle Detection Using CenSurE and SVM. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2599–2608. [Google Scholar] [CrossRef]
- Mori, H.; Charkai, N. Shadow and rhythm as sign patterns of obstacle detection. In Proceedings of the International Symposium on Industrial Electronics, Budapest, Hungary, 1–3 June 1993; pp. 271–277. [Google Scholar]
- Thomanek, F.; Dickmanns, E.D.; Dickmanns, D. Multiple object recognition and scene interpretation for autonomous road vehicle guidance. In Proceedings of the Intelligent Vehicles ’94 Symposium, Paris, France, 24–26 October 1994; pp. 231–236. [Google Scholar]
- Raboisson, S.; Schmouker, P. Obstacle Detection in Highway Enviroment by Colour CCD Camera and Image Processing Prototype Installed in a Vehicle. In Proceedings of the Intelligent Vehicles ’94 Symposium, Paris, France, 24–26 October 1994; pp. 44–49. [Google Scholar]
- Kalinke, T.; Tzomakas, C.; Seelen, W. A textured-based object detection and an adaptive model-based classification. In Proceedings of the International Conference on Intelligent Vehicles, Stuttgart, Germany, 28–30 October 1998; pp. 143–148. [Google Scholar]
- Tzomakas, C.; Seelen, W. Vehicle Detection in Traffic Scenes using Shadows; Technical Report; Institut FurNeuroinformatik, Ruht-universitat: Bochum, Germany, 1998; pp. 98–106. [Google Scholar]
- Handman, U.; Kalinke, T.; Tzomakas, C.; Werner, M.; Seelen, W.V. An Image Processing System for Driver Assistance. Image Vis. Comput. 2000, 18, 367–376. [Google Scholar] [CrossRef]
- Hoffmann, C.; Dang, T.; Stiller, C. Vehicle detection fusing 2D visual features. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 280–285. [Google Scholar]
- Van Leeuwen, M.B.; Groen, F.C.A. Vehicle Detection with a Mobile Camera, Spotting Midrange, Distant and Passing Cars. IEEE Robot. Autom. Mag. 2005, 12, 37–43. [Google Scholar] [CrossRef]
- Lim, K.H.; Ang, L.M.; Seng, K.P.; Chin, S.V. Lane-vehicle detection and tracking. In Proceedings of the International Multi Conference of Engineers and Computer Scientists, Hong Kong, China, 18–20 March 2009; Volume II. [Google Scholar]
- Nieto, M.; Arróspide Laborda, J.; Dalgado, L. Road Enviroment Modelling using Robust Perspective Analysis and Recursive Bayesian Segmentation. Mach. Vis. Appl. 2011, 22, 927–945. [Google Scholar] [CrossRef]
- Cheon, M.; Lee, W.; Yoon, C.; Park, M. Vision-Based Vehicle Detection System with Consideration of the Detecting location. IEEE Trans. Intell. Trans. Syst. 2012, 13, 1243–1252. [Google Scholar] [CrossRef]
- Ismail, L.; Eliyan, L.; Younes, R.; Ahmed, R. Monocular vision-based collision avoidance system using shadow detection. In Proceedings of the 7th IEEE GCC Conference and Exhibition, Doha, Qatar, 17–20 November 2013; pp. 589–594. [Google Scholar]
- Sun, D.; Watada, J. Detecting pedestrians and vehicles in traffic scene based on boosted HOG features and SVM. In Proceedings of the IEEE 9th International Symposium on Intelligent Signal Processing (WISP), Siena, Italy, 15–17 May 2015; pp. 1–7. [Google Scholar]
- Ibarra, M.; Pérez, J.M.; Torre, C.; Alonso, L. MonoVision-Based Vehicle Detection, Distance and Relative Speed Measurement in Urban Traffic. IET Intell. Trans. Syst. 2014, 8, 655–664. [Google Scholar]
- Rubin, J.M.; Richards, W.A. Color Vision and Image Intensities: When are Changes Material? Biol. Cybern. 1982, 45, 215–226. [Google Scholar] [CrossRef] [PubMed]
- Salvador, E.; Cavallaro, A.; Ebrahimi, T. Cast Shadow Segmentation Causing Invariant Color Features. Comput. Vis. Image Underst. 2004, 95, 238–259. [Google Scholar] [CrossRef]
- Hanbury, A. A 3D-polar coordinate colour representation well adapted to image analysis. In Proceedings of the 13th Scandinavian Conference on Image Analysis, Halmstad, Sweden, 29 June–2 July 2003; pp. 804–811. [Google Scholar]
- Kender, J. Saturation, Hue, Normalized Color: Calculation, Digitization Effects, and Use; Technical Report; Carnegie-Mellon University: Pittsburgh, PA, USA, 1976. [Google Scholar]
- Otha, Y.; Kanade, T.; Sakai, T. Color Information for Region Segmentation. Comput. Graph. Image Process. 1980, 13, 222–241. [Google Scholar]
- Healey, G. Segmenting Images Using Normalized Color. IEEE Trans. Syst. Man. Cybern. 1992, 22, 64–73. [Google Scholar] [CrossRef]
- Ikonomakis, N.; Plataniotis, K.N.; Venersanopoulos, A.N. Color Image Segmentation for Multimedia Applications. J. Intell. Robot. Syst. 2000, 28, 5–20. [Google Scholar] [CrossRef]
- Sotelo, M.A.; Rodriguez, F.J.; Magdalena, L.; Bergasa, L.M.; Boquete, L. A Color Vision-Based Lane Tracking System for Autonomous Driving on Unmarked Roads. Auton. Robots 2004, 16, 95–116. [Google Scholar] [CrossRef]
- Sural, S.; Quin, G.; Pramanic, S. Segmentation and histogram generation using the HSV color space for image retrieval. In Proceedings of the IEEE International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; pp. 589–592. [Google Scholar]
- Shafer, S.A. Using Color to Separate Reflection Components. Color Res. Appl. 1985, 10, 210–218. [Google Scholar] [CrossRef]
- Gershon, R.; Jepson, A.D.; Tsotsos, J.K. Ambient Illumination and the Dtermination of Mterial Canges. J. Opt. Soc. Am. A 1986, 3, 1700–1707. [Google Scholar] [CrossRef] [PubMed]
- The Caltech Database (Computational Vision at California Institute of Technology, Pasadena). Available online: http://www.vision.caltech.edu/html-files/archive.html (accessed on 19 October 2015).
- Fergus, R.; Perona, P.; Zisserman, A. Object class recognition by unsupervised scale-invariant learning. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 16–22 June 2003; pp. 264–271. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cloudy | Sunny | |
|---|---|---|
| Total number of frames | 7920 | 5806 |
| Total number of vehicles within the ROI (V) | 7303 | 5115 |
| Total number of hypotheses generated (H) | 7830 | 5555 |
| Positives: Vehicle hypotheses correctly framed (P) | 7160 | 4998 |
| False positives: hypotheses of non-vehicle (FP) | 532 | 449 |
| Vehicle hypotheses incorrectly framed (FNVIF) | 138 | 108 |
| False negatives: vehicles missed (FNVM) | 5 | 9 |
| Positive rate (PR) | 98.04% | 97.71% |
| False positive rate (FPR) | 6.79% | 8.08% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ibarra-Arenado, M.; Tjahjadi, T.; Pérez-Oria, J.; Robla-Gómez, S.; Jiménez-Avello, A. Shadow-Based Vehicle Detection in Urban Traffic. Sensors 2017, 17, 975. https://doi.org/10.3390/s17050975
Ibarra-Arenado M, Tjahjadi T, Pérez-Oria J, Robla-Gómez S, Jiménez-Avello A. Shadow-Based Vehicle Detection in Urban Traffic. Sensors. 2017; 17(5):975. https://doi.org/10.3390/s17050975
Chicago/Turabian StyleIbarra-Arenado, Manuel, Tardi Tjahjadi, Juan Pérez-Oria, Sandra Robla-Gómez, and Agustín Jiménez-Avello. 2017. "Shadow-Based Vehicle Detection in Urban Traffic" Sensors 17, no. 5: 975. https://doi.org/10.3390/s17050975
APA StyleIbarra-Arenado, M., Tjahjadi, T., Pérez-Oria, J., Robla-Gómez, S., & Jiménez-Avello, A. (2017). Shadow-Based Vehicle Detection in Urban Traffic. Sensors, 17(5), 975. https://doi.org/10.3390/s17050975