
Ambiguity Resolution for Phase-Based 3-D Source Localization under Fixed Uniform Circular Array

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1
- For the source’s 3-D localization, this paper provides a novel ambiguity resolution method to obtain the source’s actual parameters with satisfactory performance and low computational complexity.
- 2
- As the proposed algorithm does not need rotation, it can achieve real-time source localization, thus the applied scope is wider than the rotary way to resolve ambiguity.
- 3
- The optimal structure of subarrays and subarray selection criteria can be exploited in SGAS to improve the performance and practicability of our approach.
2. Signal Modeling
3. Ambiguity Resolution of Source’s Angles
3.1. Source’s Angle Estimation under Unambiguous Situation
3.2. Ambiguity Resolution by Using the Method of SGAS
- Step 1
- To ascertain the scope of ambiguity, the maximum ambiguity of phase difference needs to be calculated firstly according to the equation in (16).
- Step 2
- After subarray grouping, the phase difference estimate can be computed by using receiving data of each subarray. To find the unambiguous phase difference, phase difference matrix including actual phase difference can be obtained by utilizing the traverse of ambiguity.
- Step 3
- As the unambiguous phase differences of different subarrays could form the same plural, the plural matrix is computed based on and the Equations (10)–(13) to estimate source’s angles without ambiguity.
- Step 4
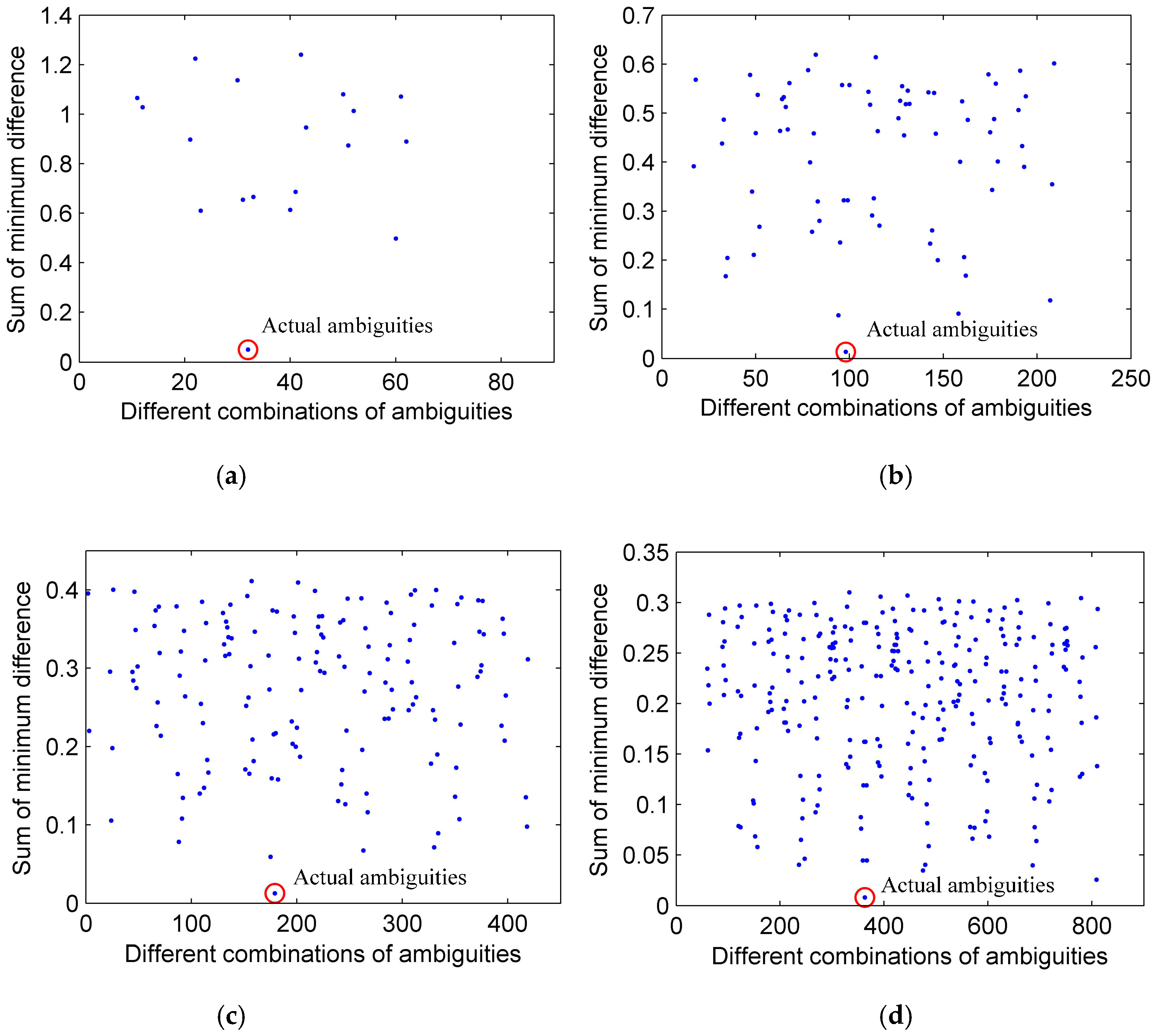
- As each column of matrix includes plural value constructed by the actual angles of the source, the method of searching the most similar plural matrix terms by minimizing magnitude of difference in the Equations (19) and (20) can be utilized to obtain the coordinate corresponding to unambiguous angles. The ambiguity-free estimation of the source’s angles are then computed by substituting the coordinate into Equations (21) and (22).
4. 3-D Parameter Estimation of Source
5. Complementary Issues to SGAS
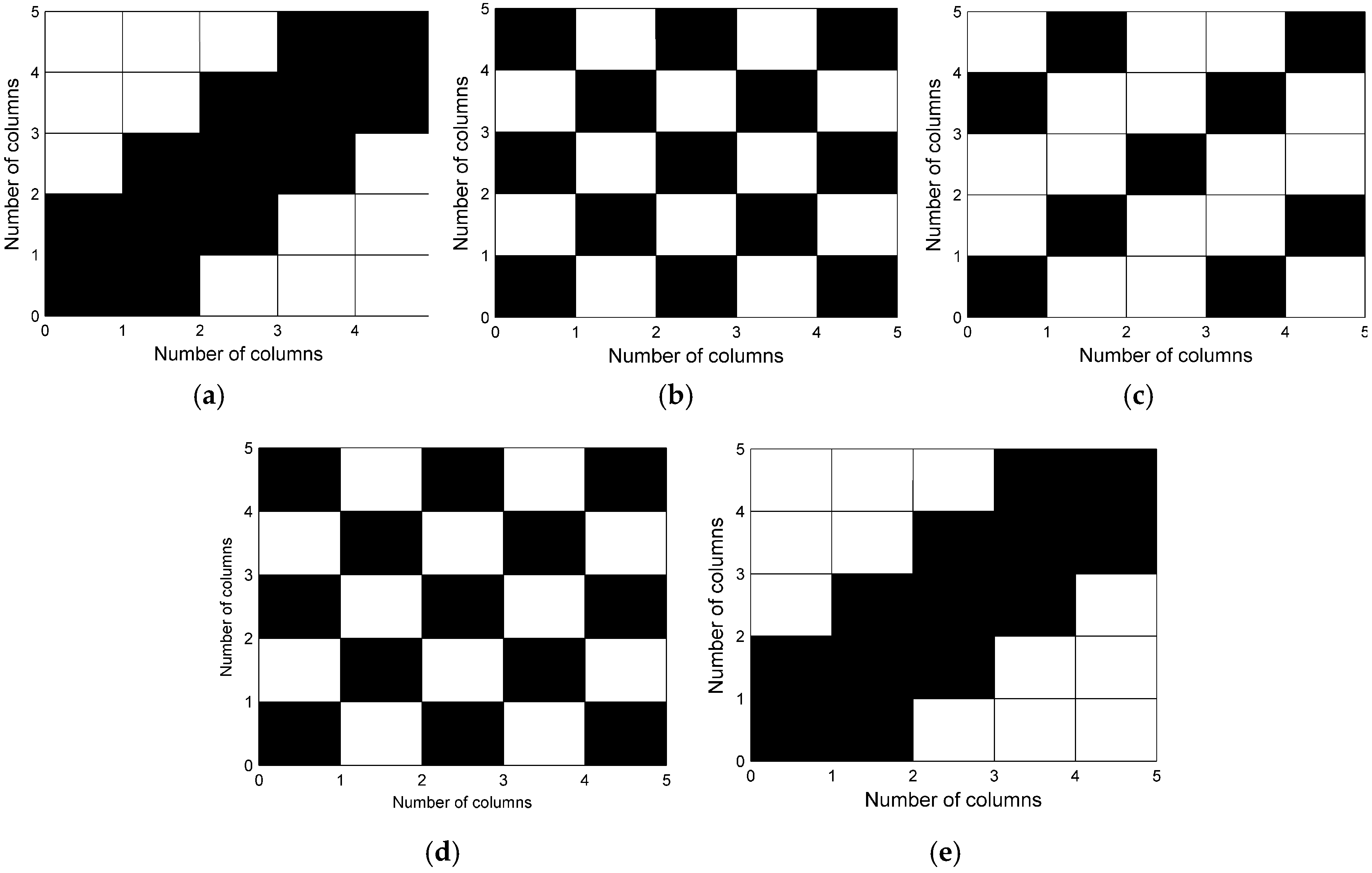
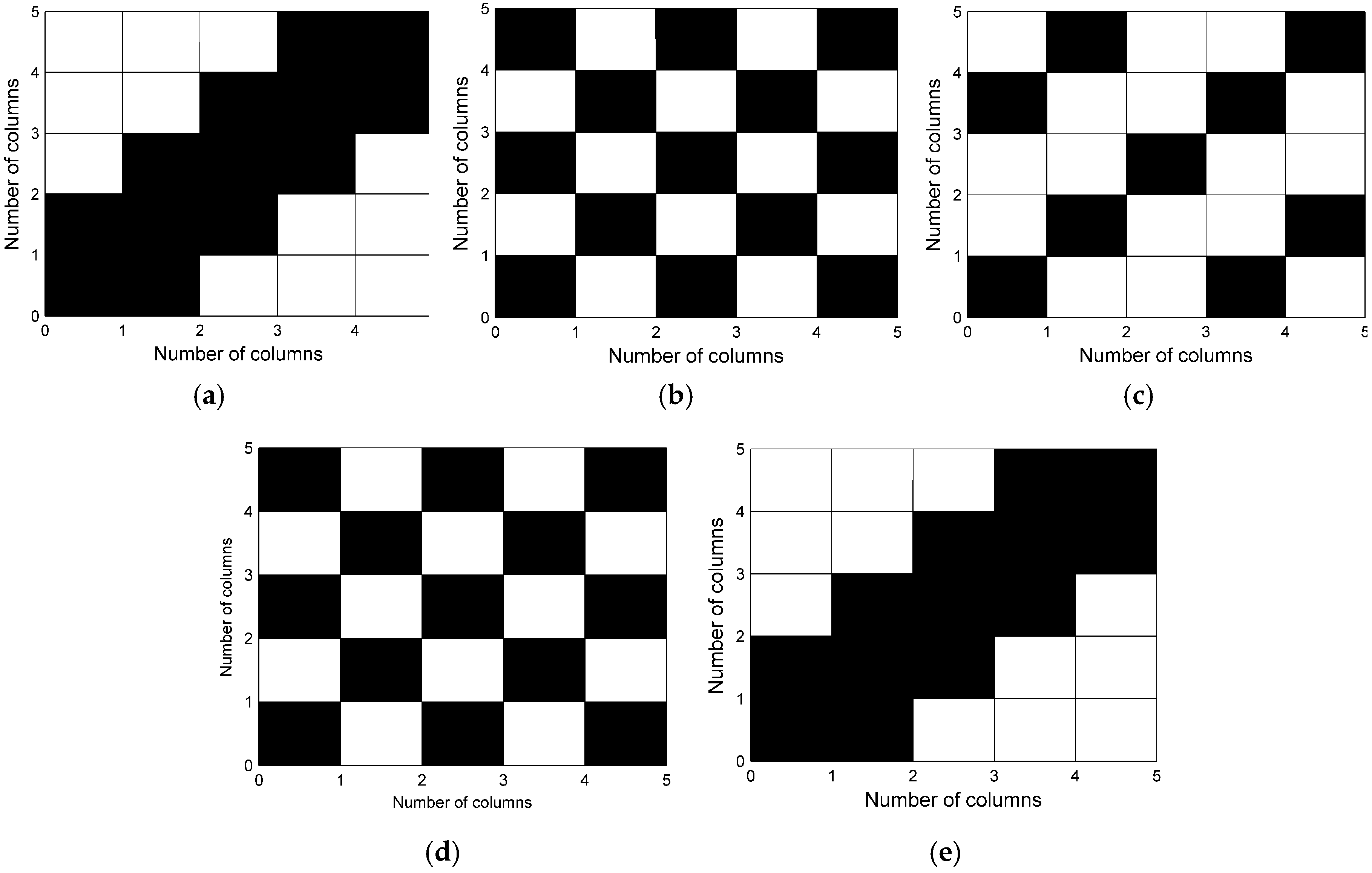
5.1. Selection of Subarray Structure
5.2. Criteria of Subarray Selection
6. Experiments
6.1. Effectiveness of SGAS
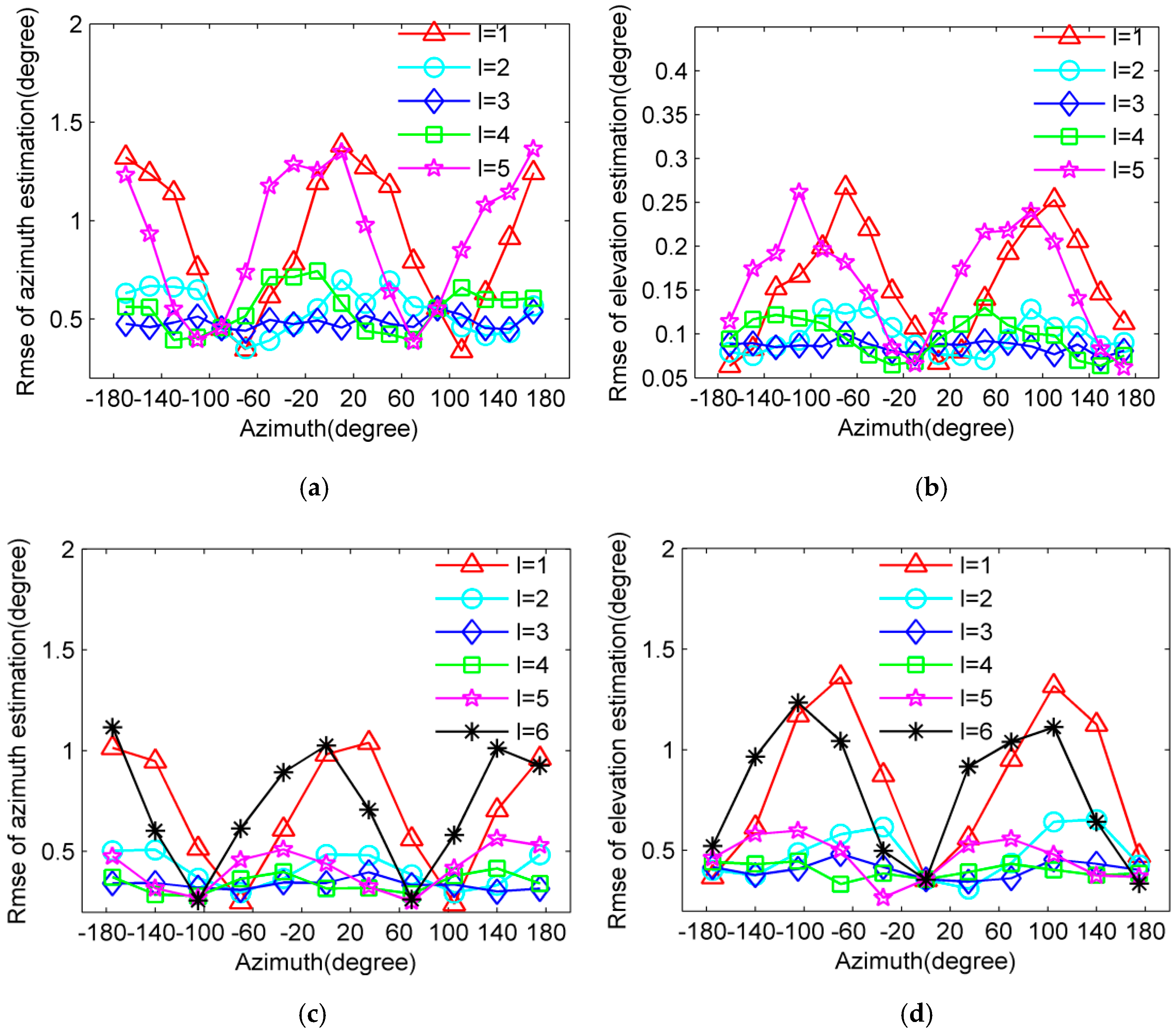
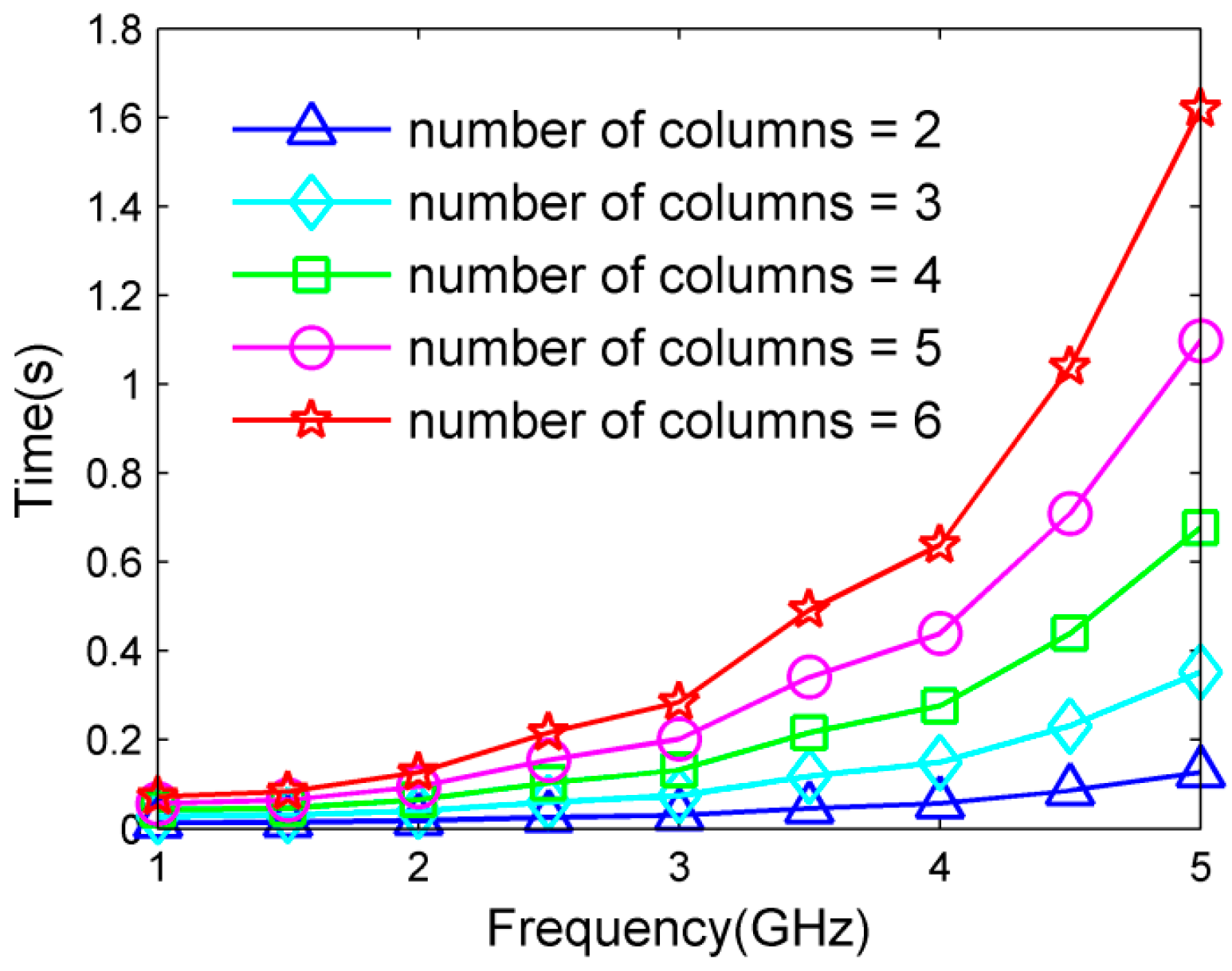
6.2. The Optimal Structure of Subarray
6.3. The Criteria of Subarray Selection
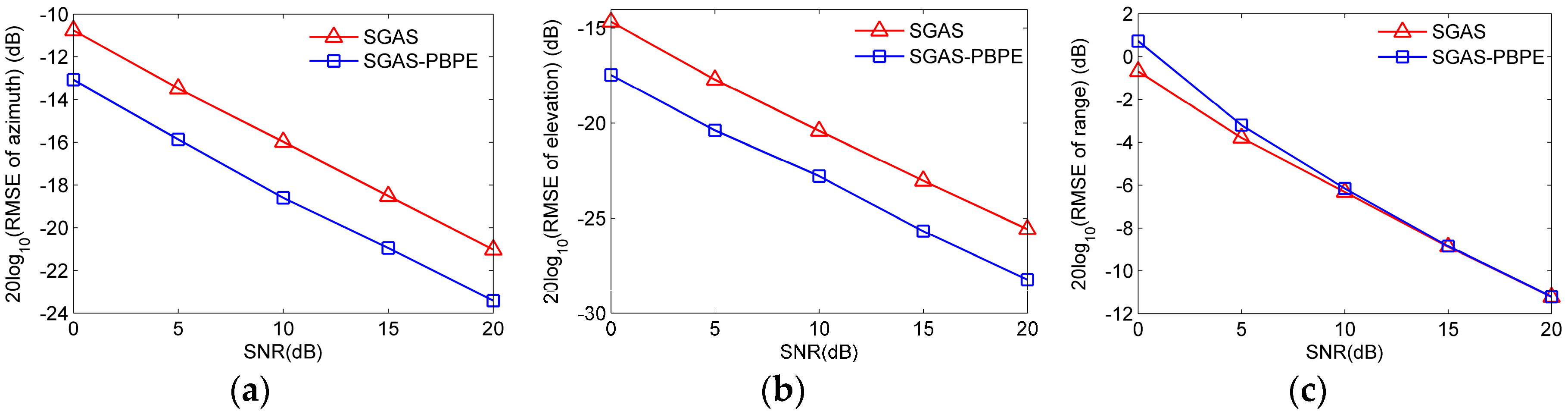
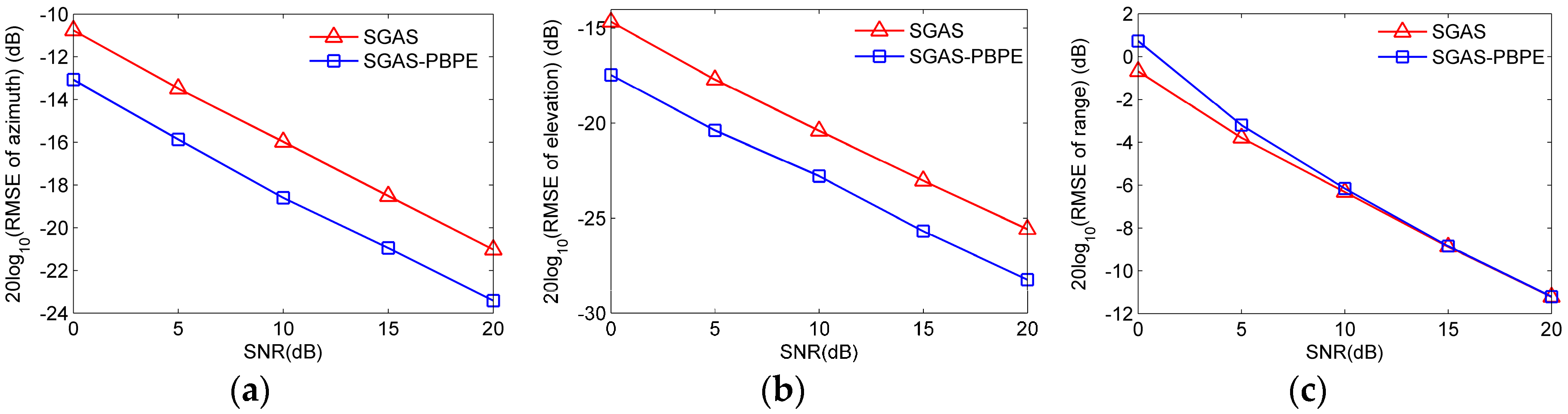
6.4. Comparison of Source’s 3-D Parameter Estimation Performance between SGAS and SGAS-PBPE
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Huang, Y.D.; Barkat, M. Near-Field multiple source localization by passive sensor array. IEEE Trans. Antennas Propag. 1991, 39, 968–975. [Google Scholar] [CrossRef]
- Wu, N.; Qu, Z.; Si, W.; Jiao, S. DOA and polarization estimation using an electromagnetic vector sensor uniform circular array based on the ESPRIT algorithm. Sensors 2016, 16, 2109. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Xie, D. Compressed symmetric nested arrays and their application for direction-of-arrival estimation of near-field sources. Sensors 2016, 16, 1939. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.T.; So, H.C. Simple and accurate two-dimensional angle estimation for a single source with uniform circular array. IEEE Antennas Wirel. Propag. Lett. 2008, 7, 78–80. [Google Scholar]
- Wu, Y.T.; Wang, H.; Zhang, Y.B.; Wang, Y. Multiple near-field source localisation with uniform circular array. Electron. Lett. 2013, 49, 1509–1510. [Google Scholar] [CrossRef]
- Starer, D.; Nehorai, A. Passive Localization of Near-Field Sources by Path Following. IEEE Trans. Signal Process. 1994, 3, 677–680. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, D.H.; Park, G.T.; Lee, K.K. Algebraic path-following algorithm for localising 3-D near-field sources in uniform circular array. Electron. Lett. 2003, 37, 1283–1285. [Google Scholar] [CrossRef]
- Bae, E.H.; Lee, K.K. Closed-form 3-D localization for single source in uniform circular array with a center sensor. IEICE Trans. Commun. 2009, E-92B, 1053–1056. [Google Scholar] [CrossRef]
- Shan, Z.Y.; Zhou, X.L.; Wu, L.S. Near-Field Source Localisation Based on a Novel 3-D Music Algorithm. J. Microw. 2005, 21, 20–23. [Google Scholar]
- Jung, T.J.; Lee, K.K. Closed-form algorithm for 3-D single-source localization with uniform circular array. IEEE Antennas. Wirel. Propag. Lett. 2014, 13, 1096–1099. [Google Scholar] [CrossRef]
- Wu, Y.T.; Wang, H.; Huang, L.T.; So, H.C. Fast algorithm for three-dimensional single near-field source localization with uniform circular array. In Proceedings of the IEEE CIE International Conference on Radar(CIE), Chengdu, China, 15–18 October 2011; pp. 350–352. [Google Scholar]
- Lin, M.T.; Liu, P.G.; Liu, J.B. Rotary way to resolve ambiguity for planar array. Proceedings of IEEE International Conference on Signal Processing Communications and Computing (ICSPCC), Guilin, China, 5–8 August 2014; pp. 170–174. [Google Scholar]
- Zheng, J.; Liu, Z.H.; Qin, B.; Yu, J.B. Algorithm for passive localization with single observer based on ambiguous phase differences measured by rotating interferometer. In Proceedings of the IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Harbin, China, 16−19 August 2013; pp. 655–659. [Google Scholar]
- Liu, Z.M.; Guo, F.C. Azimuth and elevation estimation with rotating long-baseline interferometers. IEEE Trans. Signal Process. 2015, 63, 2405–2419. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Wei, X.Z. Unambiguous parameter estimation of multiple near-field sources via rotating uniform circular array. IEEE Antennas. Wirel. Propag. Lett. 2017, 16, 872–875. [Google Scholar] [CrossRef]
- Gazzah, H.; Delmas, J. CRB analysis of near-field source localization using uniform circular arrays. Proceedings of International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–30 May 2013; pp. 3996–4000. [Google Scholar]




© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Liu, Z.; Wei, X. Ambiguity Resolution for Phase-Based 3-D Source Localization under Fixed Uniform Circular Array. Sensors 2017, 17, 1086. https://doi.org/10.3390/s17051086
Chen X, Liu Z, Wei X. Ambiguity Resolution for Phase-Based 3-D Source Localization under Fixed Uniform Circular Array. Sensors. 2017; 17(5):1086. https://doi.org/10.3390/s17051086
Chicago/Turabian StyleChen, Xin, Zhen Liu, and Xizhang Wei. 2017. "Ambiguity Resolution for Phase-Based 3-D Source Localization under Fixed Uniform Circular Array" Sensors 17, no. 5: 1086. https://doi.org/10.3390/s17051086
APA StyleChen, X., Liu, Z., & Wei, X. (2017). Ambiguity Resolution for Phase-Based 3-D Source Localization under Fixed Uniform Circular Array. Sensors, 17(5), 1086. https://doi.org/10.3390/s17051086