Radio Frequency Compatibility Evaluation of S Band Navigation Signals for Future BeiDou

Abstract
:1. Introduction
2. Radio Frequency Compatibility Evaluation Methods
2.1. Compatibility Evaluation Method for Acquisition
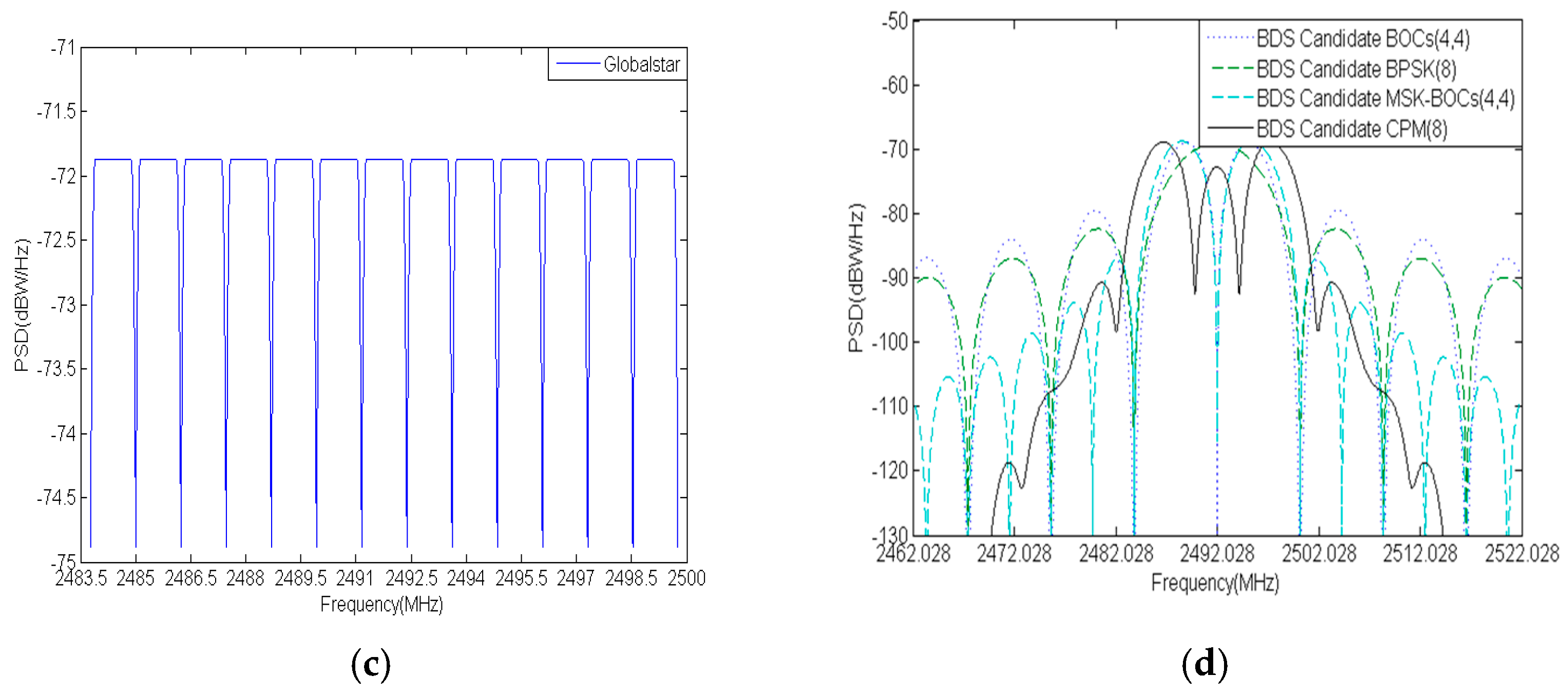
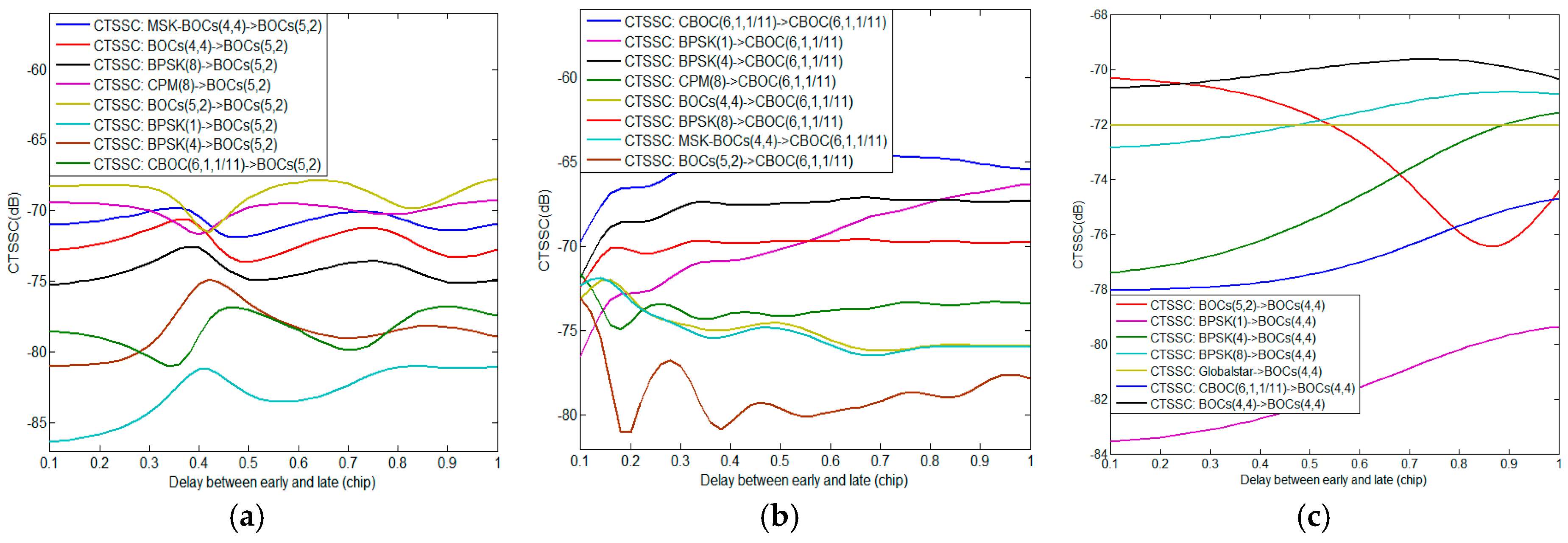
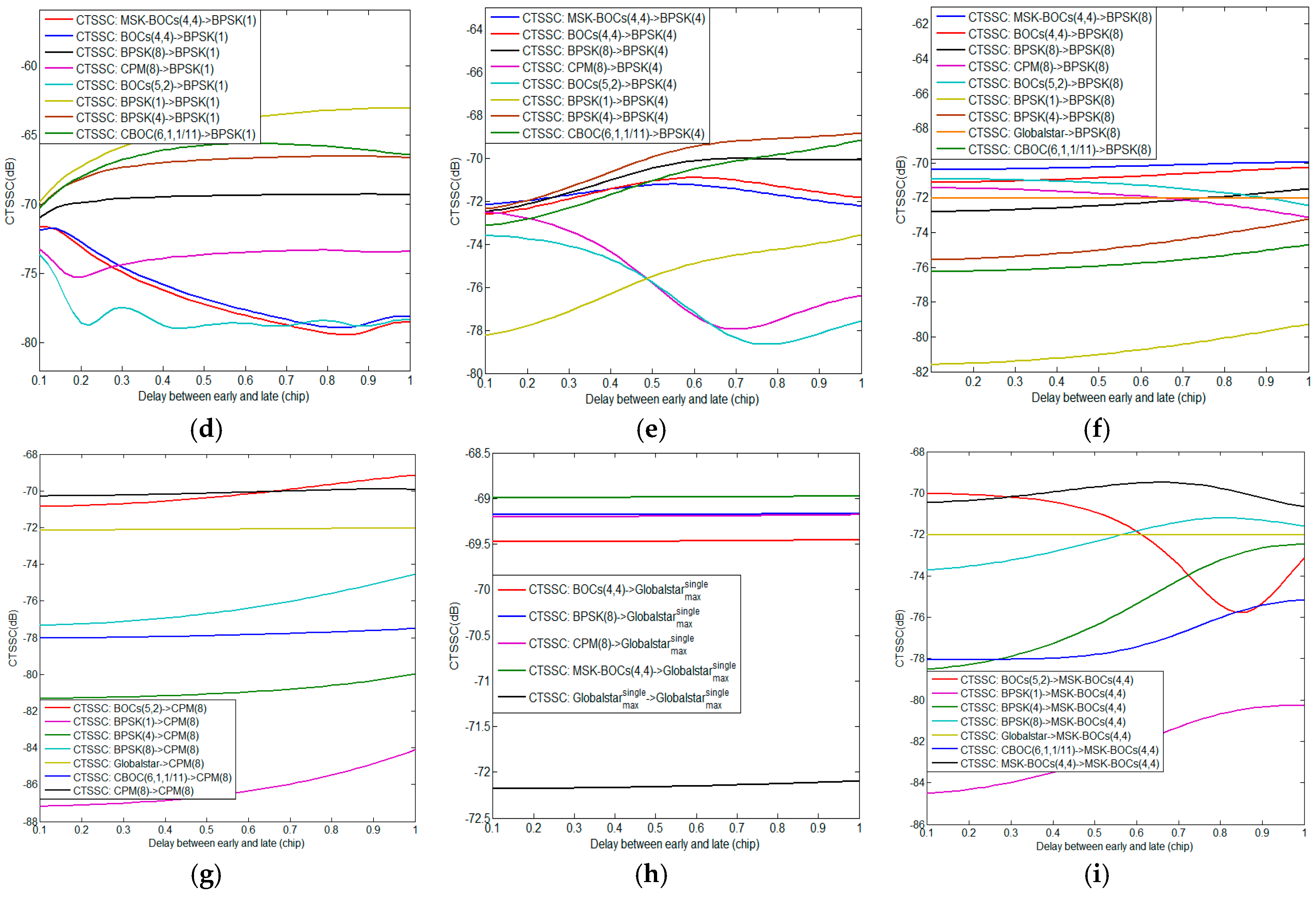
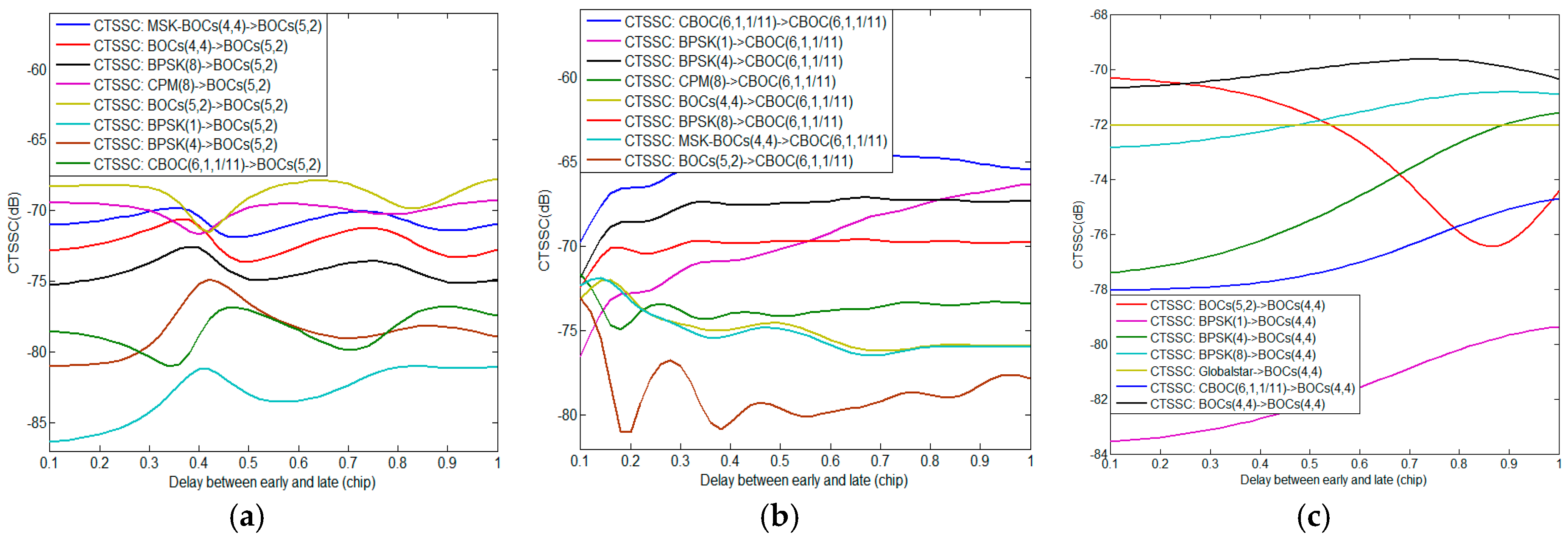
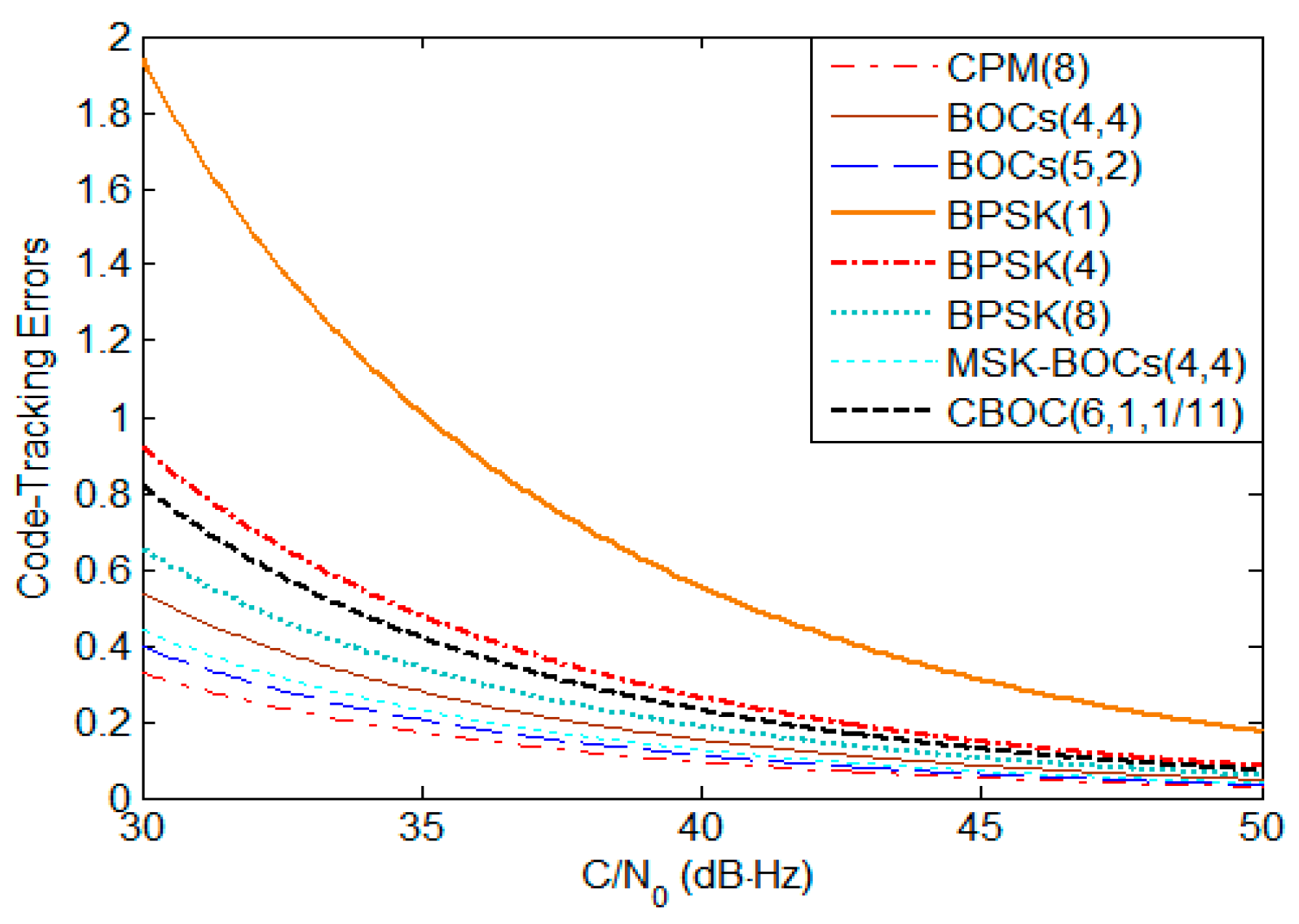
2.2. Compatibility Evaluation Method for Code Tracking
3. Space Constellation and Signal Parameters
3.1. Space Constellation
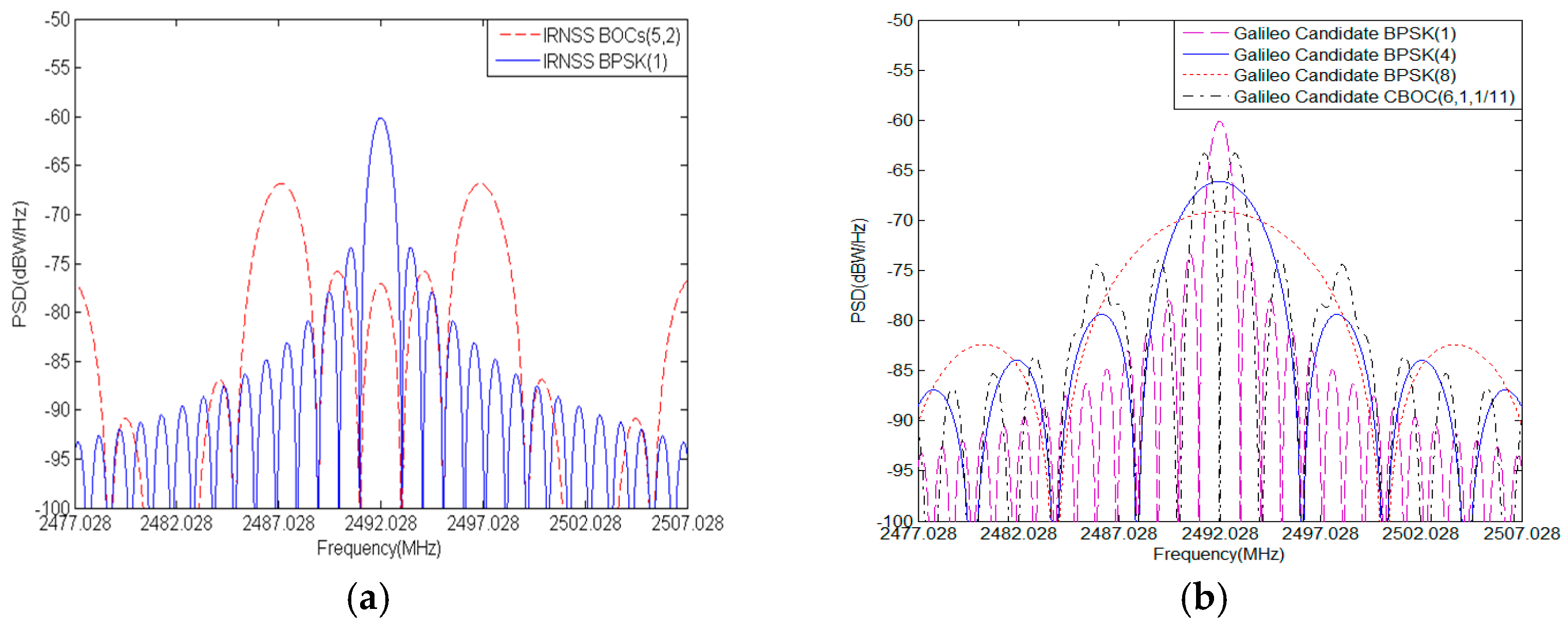
3.2. S Band Signals
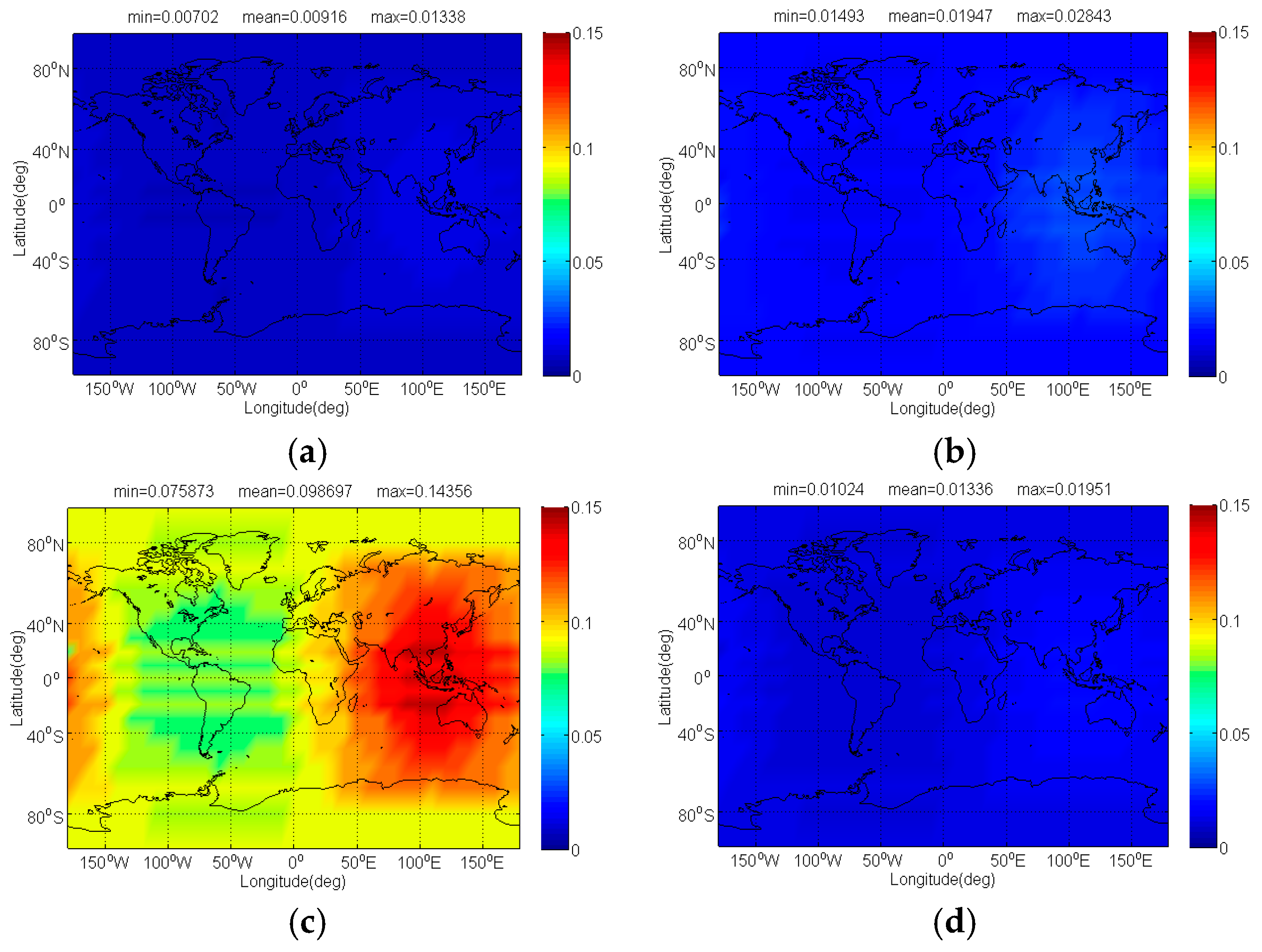
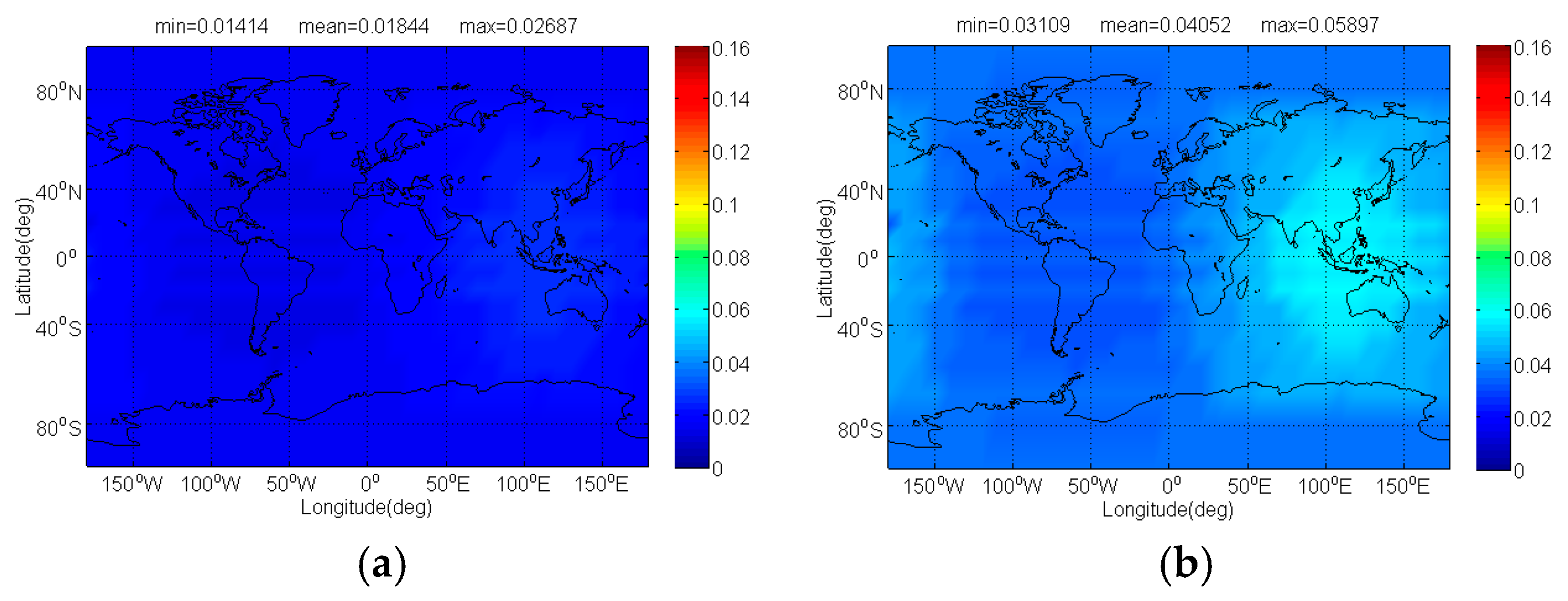
4. Radio Frequency Compatibility Evaluation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Betz, J.W. Signal structures for satellite-based navigation: Past, present and future. Inside GNSS 2013, 8, 34–42. [Google Scholar]
- Gao, G.X.; Enge, P. How Many GNSS Satellites are Too Many. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2865–2874. [Google Scholar] [CrossRef]
- Wallner, S.; Eissfeller, B.; Issler, J.-L. A vision on new frequencies, signals and concepts for future GNSS systems. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007; pp. 1–19. [Google Scholar]
- Mansoor, S.; Janjua, N. Globalstar Satellites system for ranging and positioning analytical study. J. Indep. Stud. Res. Comput. 2008, 6, 1–6. [Google Scholar]
- Paonni, M.; Mateau, I.; Issler, J.L.; Hein, G.W. A search for spectrum: GNSS signals in S-Band part 2. Inside GNSS 2010, 1, 46–53. [Google Scholar]
- Mateu, I.; Paonni, M.; Issler, J.L.; Hein, G.W. A search for spectrum: GNSS signals in S-Band part 1. Inside GNSS 2010, 2, 65–71. [Google Scholar]
- Issler, J.L.; Eissfeller, B. Toward centimetric positioning thanks to L-and S-Band GNSS and to meta-GNSS signals. In Proceedings of the 2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, Toulouse, France, 8–10 December 2010; pp. 1–8. [Google Scholar]
- Paonni, M.; Curran, J.T.; Bavaro, M.; Fortuny, J. GNSS Meta-signals: Coherently Composite Processing of Multiple GNSS Signals. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 2592–2601. [Google Scholar]
- Thoelert, S.; Montenbruck, O.; Meurer, M. IRNSS-1A: Signal and clock characterization of the Indian regional navigation system. GPS Solut. 2014, 18, 147–152. [Google Scholar] [CrossRef]
- Nadarajah, N.; Khodabandeh, A.; Teunissen, P.J. Assessing the IRNSS L5-signal in combination with GPS, Galileo, and QZSS L5/E5a-signals for positioning and navigation. GPS Solut. 2016, 20, 289–297. [Google Scholar] [CrossRef]
- Mateu, I.; Boulanger, C.; Issler, J.-L.; Ries, L.; Avila-Rodriguez, J.-A.; Wallner, S.; Kraus, T.; Eissfeller, B.; Mulassano, P.; Germaine, S.; et al. Exploration of possible GNSS signals in S-band. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; pp. 1573–1587. [Google Scholar]
- Qin, P. The research of the signal in the S frequency band. In Proceedings of the China Satellite Navigation Conference, Wuhan, China, 15–16 May 2013; pp. 1–5. [Google Scholar]
- Xue, R.; Sun, Y.; Zhao, D. CPM Signals for Satellite Navigation in the S and C Bands. Sensors 2015, 15, 13184–13200. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Zeng, D.; Li, R. Study on MSK Modulation for S-band. In Proceedings of the 2013 China Satellite Navigation Conference, Wuhan, China, 15–17 May 2013; pp. 61–69. [Google Scholar]
- M.1831: A Coordination Methodology for RNSS Inter-System Interference Estimation. Available online: https://www.itu.int/rec/R-REC-M.1831-1-201509-I/en (accessed on 5 May 2017).
- Soualle, F.; Burger, T. Radio frequency compatibility criterion for code tracking performance. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007; pp. 1201–1210. [Google Scholar]
- Betz, J.W.; Kolodziejski, K.R. Generalized theory of code tracking with an early-late discriminator part II: Noncoherent processing and numerical results. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1551–1564. [Google Scholar] [CrossRef]
- Zhang, J.; Yao, Z.; Lu, M. Generalized Theory and Decoupled Evaluation Criteria for Unmatched Despreading of Modernized GNSS Signals. Sensors 2016, 16, 1128. [Google Scholar] [CrossRef] [PubMed]
- Betz, J.W. Effect of Partial-Band interference on receiver estimation of C/N0: Theory. In Proceedings of the Institute of Navigation, Long Beach, CA, USA, 22–24 January 2001; pp. 817–828. [Google Scholar]
- Betz, J.W.; Kolodziejski, K.R. Generalized theory of code tracking with an early-late discriminator part I: Lower bound and coherent processing. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1538–1556. [Google Scholar] [CrossRef]
- Sekhar, C.R.; Dutt, V.S.I.; Rao, G.S. GDoP estimation using Simulated Annealing for GPS and IRNSS combined constellation. Eng. Sci. Technol. Int. J. 2016, 19, 1881–1886. [Google Scholar] [CrossRef]
- Gupta, R.K.; Swearingen, D. Mobile Satellite Communications Markets: Dynamics and Trends. In Handbook of Satellite Applications, 2nd ed.; Springer International Publishing: Boston, MA, USA, 2017; pp. 171–196. [Google Scholar]
- Santangelo, A.D.; Skentzos, P. Utilizing the Globalstar Network for Satellite Communications in Low Earth Orbit. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; pp. 1–8. [Google Scholar]
- European GNSS (Galileo) Open Service Signal in Space Interface Control Document; European Union: Stadt Brüssel, Belgium, 2016.
- Meng, W.; Liu, E.; Han, S.; Yu, Q. Research and Development on Satellite Positioning and Navigation in China. IEICE Trans. Commun. 2012, B, 3385–3392. [Google Scholar] [CrossRef]
- Sun, F.; Liu, S.; Zhu, X.; Men, B. Research and progress of Beidou satellite navigation system. Sci. China Inf. Sci. 2012, 55, 2899–2907. [Google Scholar] [CrossRef]
- BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal (Version 2.1); China Satellite Navigation Office: Beijing, China, 2016.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | BDS | IRNSS | Galileo | Globalstar |
|---|---|---|---|---|
| Satellite Types | 27MEO + 5GSO + 3IGSO | 3GSO + 4IGSO | 27MEO | 32LEO |
| Constellation | 5GSO: 58.75° E, 80° E, 110.5° E, 140° E, and 160° E; 3GSO: 118° E; 27MEO:Walker 27/3/1. | 3GSO: 32.5° E, 83° E, and 131.5° E;2IGSO:55° E; 2IGSO:111.75° E; | Walker 27/3/1 | 32/8 |
| Eccentricity | 0° | 0° | 0° | 0 |
| Inclination | 55° | 29° | 56° | 52° |
| Semimajor Axis | GSO:42157.4 km; IGSO:42157.4 km; MEO:27899.4 km | GSO:42166.3 km; IGSO: 42166.3 km | MEO: 29601.3 km | LEO: 7785.4 km |
| Simulation Parameter | Parameter Setting |
|---|---|
| Simulation Time | 10 days |
| Time Resolution | 1 min |
| Grid Resolution | Longitude: 10°; Latitude: 10° |
| Minimum Elevation Angle | 10° |
| Receiver Bandwidth | Navigation signal: 16.363 MHz; Globalstar signal: 1.23 MHz |
| SSC(dB) | Interference Signals | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| CPM(8) | BOCs(4,4) | BPSK(8) | MSK-BOCs(4,4) | BPSK(1) | BPSK(4) | BOCs(5,2) | CBOC(6,1,1/11) | Globalstar | ||
| Desired Signals | CPM(8) | −70.54 | −73.81 | −74.36 | −72.28 | −73.24 | −74.99 | −70.62 | −74.84 | −72.16 |
| BOCs(4,4) | −73.81 | −70.93 | −72.17 | −70.62 | −79.93 | −73.91 | −73.10 | −75.36 | −72.72 | |
| BPSK(8) | −74.36 | −72.17 | −70.90 | −72.09 | −69.32 | −69.93 | −74.98 | −70.07 | −72.48 | |
| MSK-BOCs(4,4) | −72.28 | −70.62 | −72.09 | −70.14 | −80.32 | −74.30 | −71.60 | −75.50 | −72.08 | |
| BPSK(1) | −73.24 | −79.93 | −69.32 | −80.32 | −61.86 | −66.50 | −77.89 | −68.28 | −72.04 | |
| BPSK(4) | −74.99 | −73.91 | −69.93 | −74.30 | −66.5 | −67.88 | −78.37 | −67.76 | −72.26 | |
| BOCs(5,2) | −70.62 | −73.10 | −74.98 | −71.60 | −77.89 | −78.37 | −69.36 | −78.62 | −72.86 | |
| CBOC(6,1,1/11) | −74.84 | −75.36 | −70.07 | −75.50 | −68.28 | −67.76 | −78.62 | −65.66 | 72.31 | |
| −80.23 | −80.51 | −80.29 | −80.03 | −72.71 | −77.36 | −78.37 | −77.52- | −83.13 | ||
| (dBW) | Maximum Received Power | Minimal Received Power |
|---|---|---|
| CPM(8) | −167.2 | −170.2 |
| BOCs(4,4) | −163.4 | −166.4 |
| BOCs(5,2) | −165.8 | −168.8 |
| CBOC(6,1,1/11) | −159.8 | −162.8 |
| BPSK(1) | −152.3 | −155.3 |
| BPSK(4) | −158.7 | −161.7 |
| BPSK(8) | −161.6 | −164.6 |
| MSK-BOCs(4,4) | −164.9 | −167.9 |
| Globalstar | −155.4 | −158.4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Xue, R.; Zhao, D.; Wang, D. Radio Frequency Compatibility Evaluation of S Band Navigation Signals for Future BeiDou. Sensors 2017, 17, 1039. https://doi.org/10.3390/s17051039
Sun Y, Xue R, Zhao D, Wang D. Radio Frequency Compatibility Evaluation of S Band Navigation Signals for Future BeiDou. Sensors. 2017; 17(5):1039. https://doi.org/10.3390/s17051039
Chicago/Turabian StyleSun, Yanbo, Rui Xue, Danfeng Zhao, and Dun Wang. 2017. "Radio Frequency Compatibility Evaluation of S Band Navigation Signals for Future BeiDou" Sensors 17, no. 5: 1039. https://doi.org/10.3390/s17051039
APA StyleSun, Y., Xue, R., Zhao, D., & Wang, D. (2017). Radio Frequency Compatibility Evaluation of S Band Navigation Signals for Future BeiDou. Sensors, 17(5), 1039. https://doi.org/10.3390/s17051039