1. Introduction
The process of improving the precision of the inertial sensor used in an inertial navigation system (INS) is very difficult. Not only new manufacturing process techniques but also advanced assembly techniques and neoteric original materials are necessary to achieve the higher precision [
1,
2,
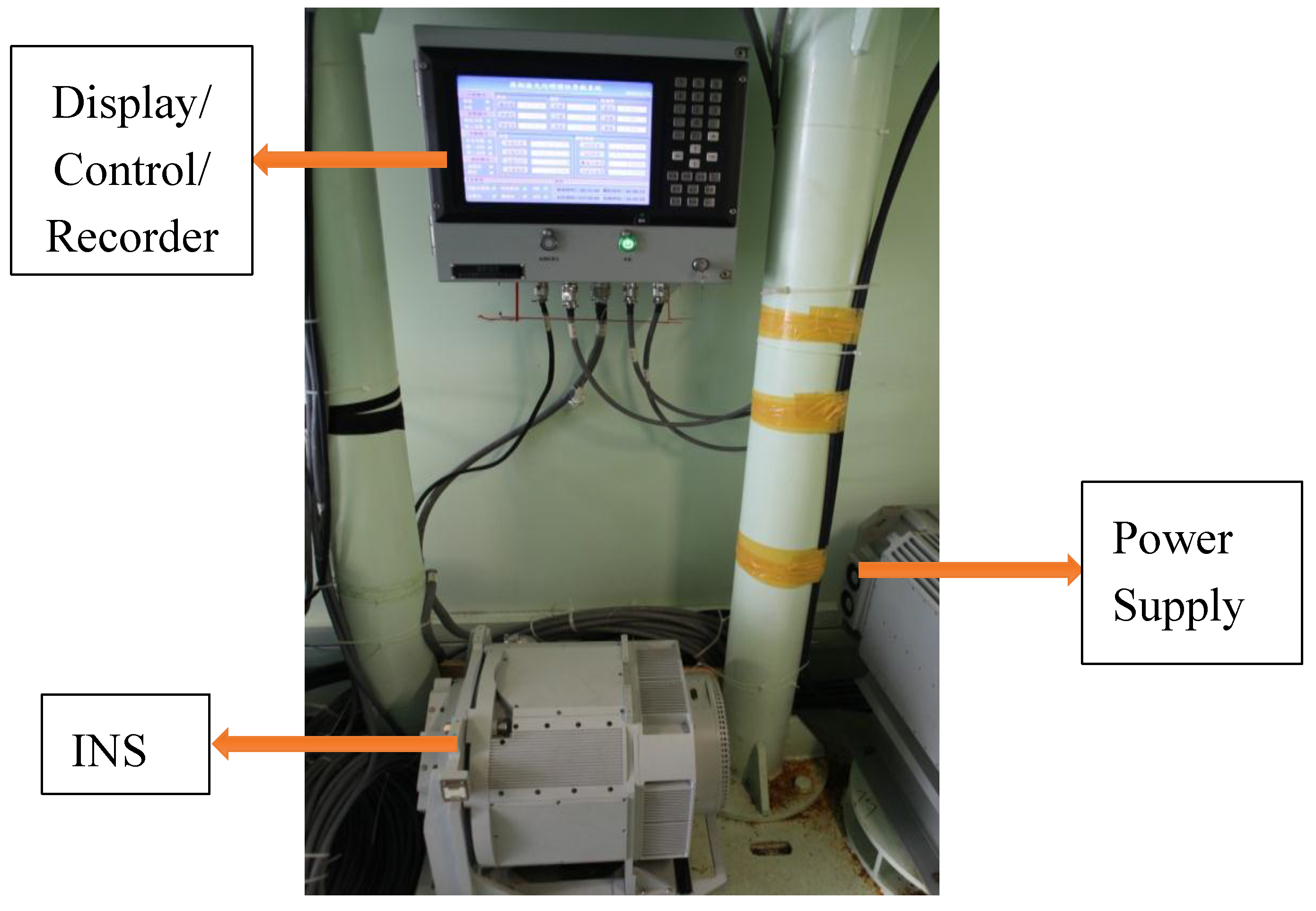
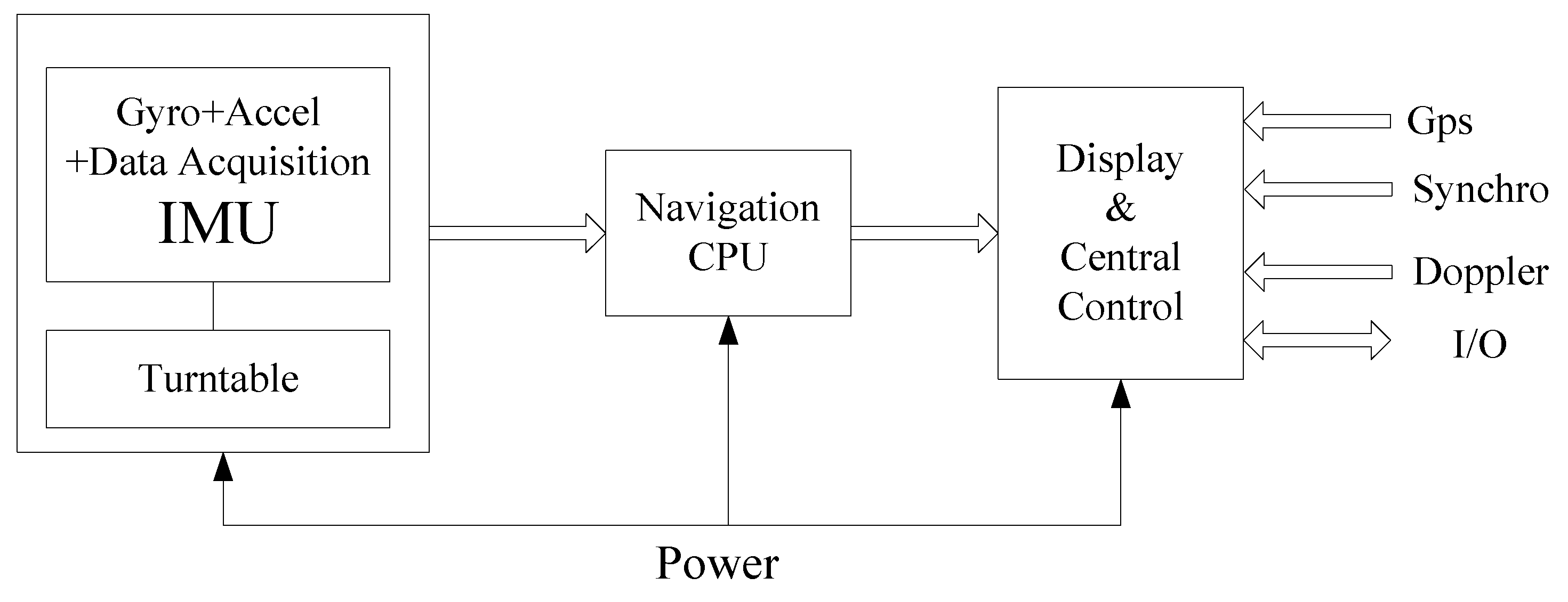
3]. This is obviously costly. The dual-axis rotation modulating technique means the precision of an INS can be improved without using higher precision gyros. It is one of the strategies of improving the system precision performance at the system level. The key building blocks of the INS comprise an inertial measurement unit, a turntable, a navigation center processing unit (CPU), a display unit, and a control unit. The inertial measurement unit (IMU) has three gyroscopes and three accelerometers. Because the random drift noise cannot be modulated, normally dithered ring laser gyroscopes are used in the rotation modulating INS [
4].
Obviously this is much more economical and convenient than the technique of improving the precision of the inertial sensors in an INS. Therefore, this technology has received wide attention in recent years in marine navigation for achieving high performance and low cost [
4]. The North Atlantic Treaty Organization (NATO) including the United States uses this technology widely in naval ships and submarines [
5,
6].
As integration is essence of inertial navigation, the velocity and the position of a carrier can be obtained by integrating the output signals of the gyros and accelerations. Through the presentable symmetrical rotation around the axis with the IMU, some kinds of errors’ mean values such as the constant drift, asymmetry error of scale factor, etc., can be shifted to sinusoidal form [
7,
8,
9,
10]. Through the integration, these parameters can approach to zero. Then, the precision of the system is improved indirectly [
11,
12,
13]. Thus the higher position accuracy can be obtained by the rotating modulation technique without raising the inertial component precision.
All technologies have two sides. Either case rotation or platform rotation creates coning errors. The disadvantage of rotation modulation is that it brings out an additional drift rate caused by the rotating vector, and then the attitude error is produced [
14]. The nonconforming angle between the axis of casing rotation or the axis of platform rotation and the sensitive axis of the gyroscope obviously exists. In particular, misalignment will cause attitude error [
15]. Another disadvantage of modulating technology is that demodulation is needed to show the real attitude of the carrier. That means that the attitude accuracy processing equation is more complex in dual-axis rotation modulation INS than in the strap down inertial navigation system (SINS) and single-axis rotation modulation INS. The attitude transformation matrix considered regarding the nominal trajectory of platform movement, case rolling non-alignment angle, gimbal-angle error, and setting error has been built in [
14]. The matrix is suitable for space-stable systems, especially electrostatically suspended gyroscope (ESG) monitors. For dual-axis rotation modulation INS, the attitude transformation matrix should be rebuilt. This has not discussed completely up to now.
The attitude error propagation equation in [
16] is concentrated by the fixing error angle between the two axes. A calibration method based on the theoretical study is put forward in this article. A demodulation program has been built regarding the angle conversion between the six different coordinate systems. The angle between the IMU and inner axis and the angle between the inner axis and outer axis are calculated by traditional calibration. [
17] discusses the influence of the installation inclination angle on attitude accuracy. Because the analysis is based on the single-axis system, only the azimuth angle is considered. An approximate sinusoidal principle mathematic model is established and applied to the compensation of the vehicle attitude output deviation. [
18] provides the error model considering the gyro drift, accelerometer error, misalignment angle of the gyro case rotation axis, installation error, and frame angle bias. The system parameters are identified by the least squares identification method. The discussion focuses on the attitude accuracy of space-stable INS. [
19] builds the calibration and compensation method for the precision of the output attitude in the dual-axis rotational INS. The mounting errors between the inertial measurement unit and the turntable are analyzed and calibrated. The calibration method is a thin-shell (TS) algorithm. Again, the turntable frame is an orthogonal coordinate frame. Only article [
20] talks about the redundancy angle variation causing the cross coupling effect. It can also cause velocity and attitude disturbances. The model is still based on the coordinate transformation between the platform frame and ESG.
All the articles mentioned above do not analyze the axis non-orthogonal angle. The research done before also does not consider the coupled effects caused by this angle. Therefore, the attitude error caused by the shaft swing angle cannot be compensated thoroughly. The variation of the velocity and attitude are increased with the increase of the axis non-orthogonal angle. This article puts emphasis on the non-orthogonal angle of the axes and the shaft swing angle among all the diathesis.
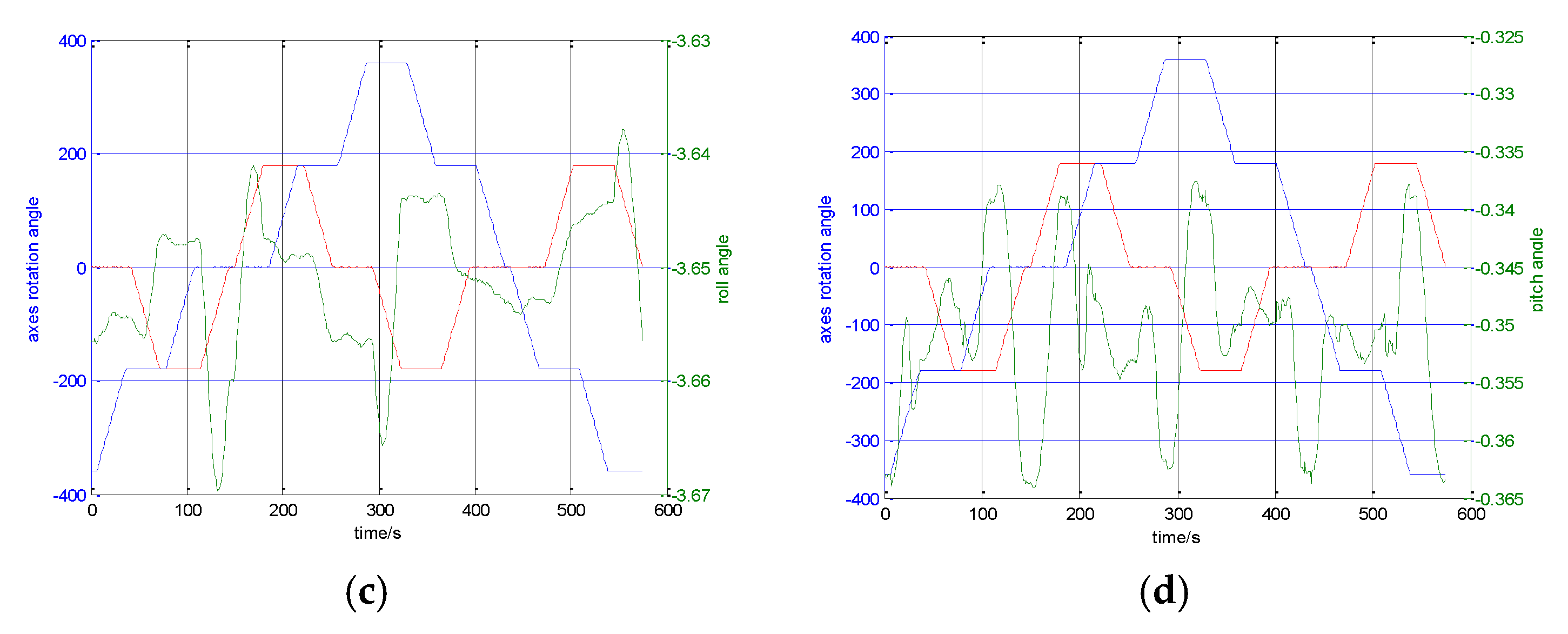
The structure diagram is used to illustrate that these two angles are indeed unavoidable. The variation component of the shaft swing angle will increase the uncertainty component in the attitude error. Observing the actual uncompensated attitude of the designed dual-axis rotational system, two main kinds of error are shown. One has a sinusoidal curve, and the other has a jagged curve. The quantity of the former is about scores of arc-min and the latter is about 10% of the former. As for the sinusoidal curve, the core of the theory is the coning error which is evidenced by the rotating vector differential equation. Besides, the rolling non-alignment angle, axis non-orthogonal angle, and shaft swing angle all influence the attitude transform matrix through coining error formation. So the attitude precision is determined greatly by these factors. It also decides the platform price of mainly the two axis platform. The cross coupling effect due to shaft swing angle and its variation should make the platform rolling non-alignment angle not be compensated completely. Due to the axis non-orthogonal angle, periodic components exist. When the IMU rotates around the horizontal axis, the X gyro and Y gyro will produce periodic components on the horizontal axis. In order to obtain high precision attitude, we need to determine the axis non-orthogonal angle and the shaft swing angle. Then we can compensate for them.
The direction-cosine matrix (DCM) including the axis non-orthogonal angle and platform rolling angle is described based on the geometric projection of the error vectors. In order to obtain the values of the parameters, the calibration and compensation methods are given based on the attitude error matrix. Notice that the attitude angle and heading angle are unchanged under the static condition, and the fluctuation of the attitude angle and heading angle can be used as observations. Five resolutions of vectors which are decomposed by the non-orthogonal angle and shaft swing angle in the navigation coordinate can be taken as state vectors. Then, the observed equation is developed in this article. 500 Monte Carlo simulations are performed to verify the filtering accuracy. Simulation and test results show that, with the new compensation model, the attitude errors can be reduced by about three or four times.
The outline of this paper is as follows:
Section 1 is the introduction. The brief description about the gimbaled structure of the dual-axis rotation inertial navigation system is introduced briefly in
Section 2, and the cause of the non-orthogonal angle and the shaft swing angle is also given in this section.
Section 3 provides the definition of correlative coordinates. The modulation average frame is especially defined here to help set up the projection of the axis non-orthogonal angle. The expression form and the influence of the coning error are explained in detail by the rotating vector differential equation in
Section 4, and the attitude transform matrix and attitude error equation are built in this section. In
Section 5, the calibration method is shown. The simulation results and the practical experiment results are shown in
Section 6 along with the discussion. The conclusions are given in
Section 7 with some necessary discussions.
2. Structure of the Dual-Axis
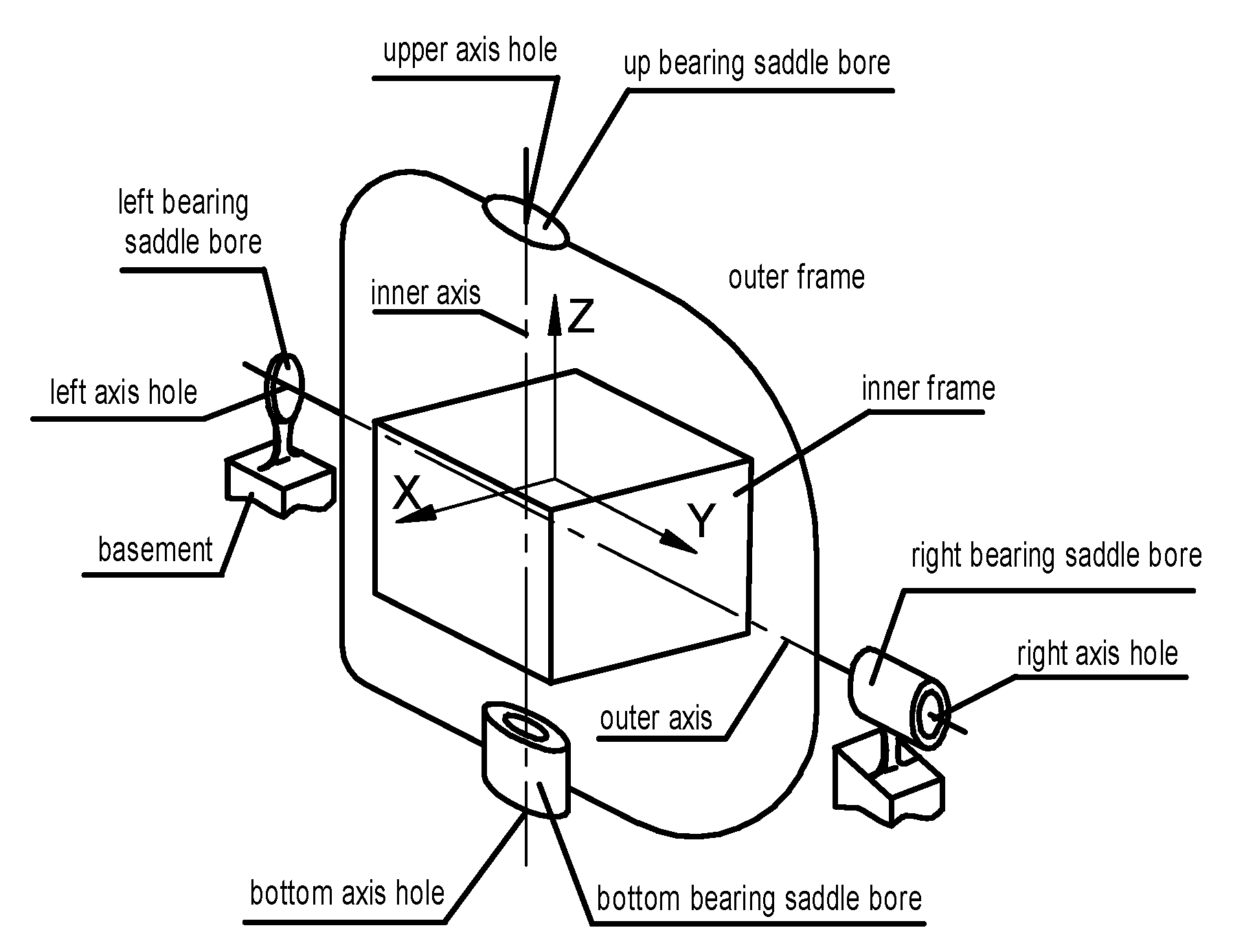
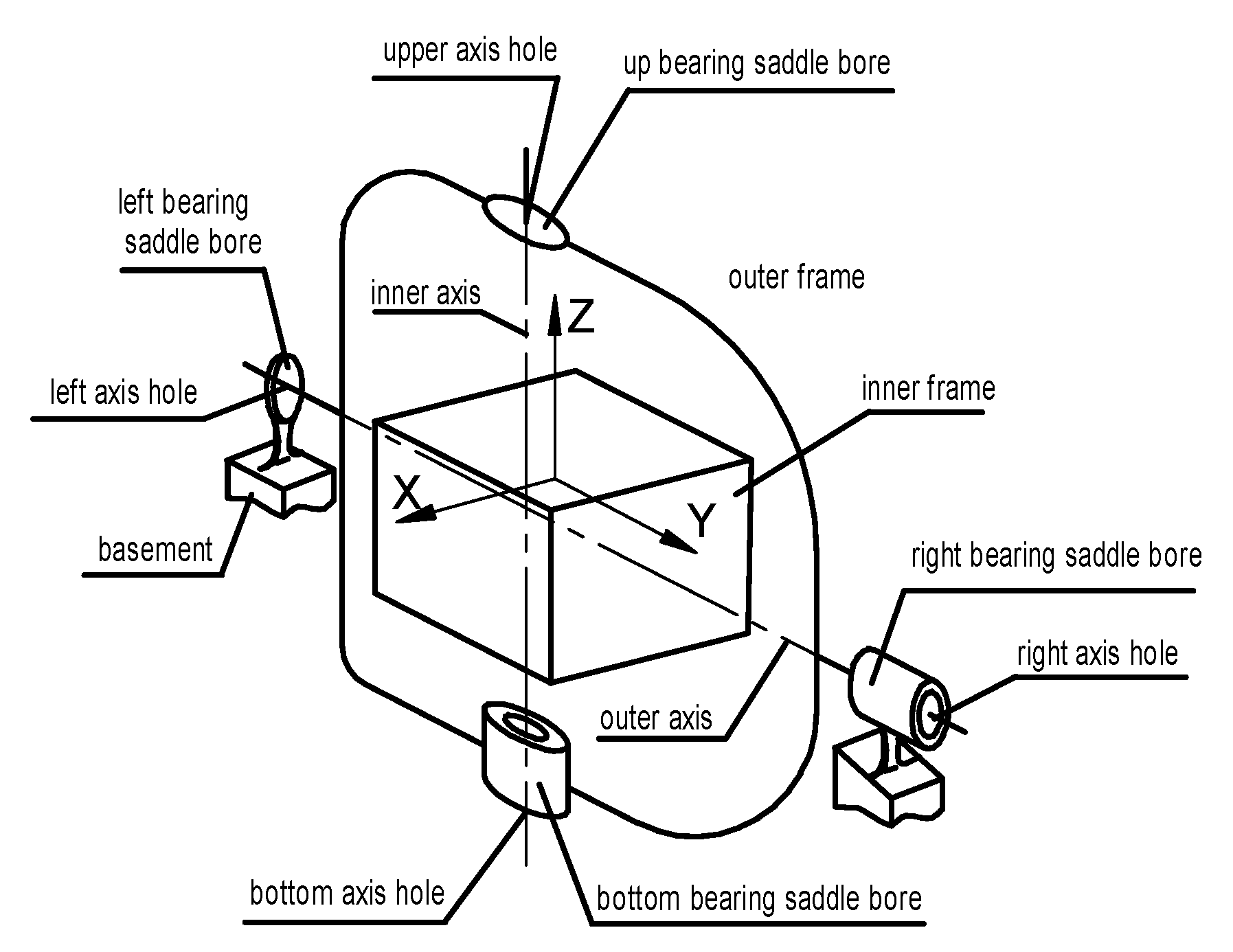
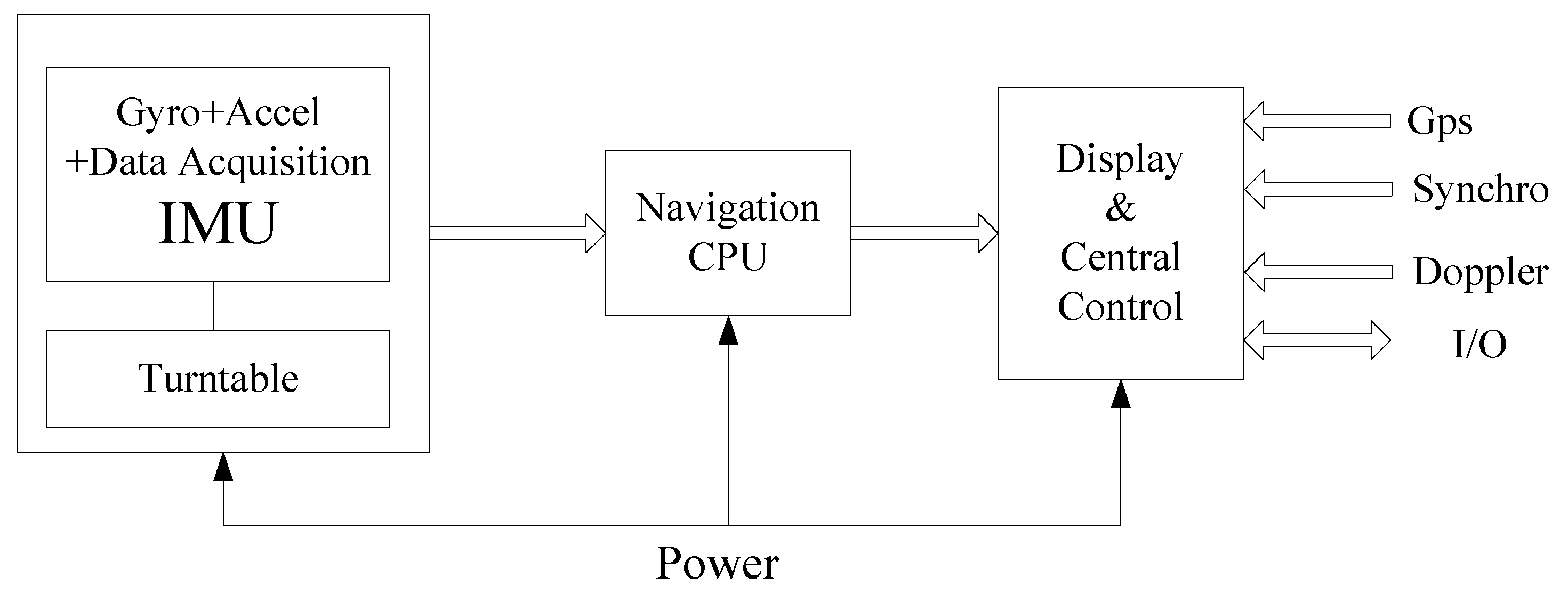
The axes of the dual-axis rotational inertial navigation system should be orthogonal in space. The structure of the dual-axis rotational INS is shown in
Figure 1.
Notice that any one of the axes consists of two discontinuous parts due to the IMU. The figure shows that the inner axis is neither the upper axis nor the lower axis. The communal axis which is determined by the upper and lower axes is actually the real rotational axis which is not any one of the physical axes. It is the same as the outer axis. The outer axis is the communal axis determined by the left and right axis. This means the center lines’ positions of the rotary axes are determined by the axis hole and the axis itself. The swing amplitude of the axis is affected by the coaxial degree between the shaft hole, the bearing saddle bore, and the bearing precision. The verticality of the common axes of the two sets of holes on the outer gimbal and the coaxiality of the two holes on the inner gimbal influence the initial static perpendicularity of the inner axis and the outer axis. The vertical and lateral degrees of the inner and outer axes are affected by the common axis, each of which consists of two holes on the outer gimbal. There are many factors that determine the stability of the actual axis, such as the machining precision of the holes, the precision of the bearings, the assembly precision, etc. As a result, the inner axis cannot be perpendicularly rigid with the outer axis. Even the co-planarity requirement of the two axes is difficult to ensure. So the actual rotation axis is swaying all the time when the physical axis is rotating.
The turntable frame is a non-orthogonal coordinate system because of the non-perpendicularity of the two rotational axes. Furthermore, the rotational axes are unstable with the rotation of the shaft. The non-orthogonal angle between the inner axis and the outer axis and the swaying of each communal axis introduce additional errors of the attitude. A quantitative analysis in theory is necessary to determine the effects of the orthogonal error and the swaying error and whether to compensate for such errors.
3. Coordinate Systems
The error analysis is developed in the determined orthogonal and right-handed coordinate frames. However, it is obvious that the sensitive axes of gyros and accelerometers are not orthogonal in the actual physical structures [
19]. In addition, the turntable frame is also non-orthogonal. All useful frames should be established for modeling and analysis.
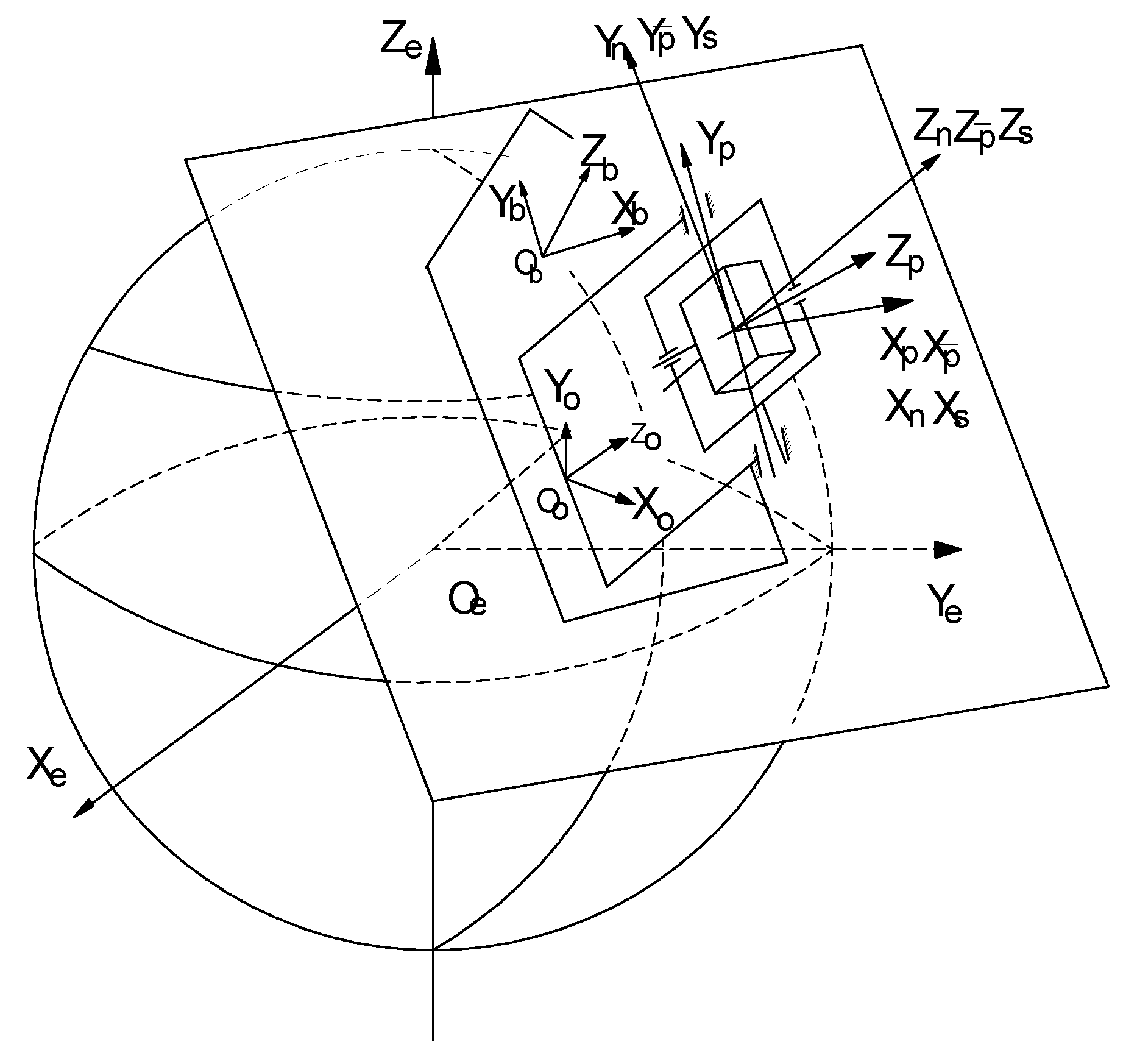
The frames include the IMU, turntable, modulation average, basement, the body, and navigation frames.
Figure 2 shows the relationship between these when the INS is settled on a horizontal plane.
3.1. IMU Frame
The IMU frame, denoted by S, is an orthogonal coordinate frame. All the accelerometers and gyros are not strictly orthogonally mounted. For ensuring correct calculations, all sensor outputs should be transformed into an orthogonal coordinate frame called the IMU frame. The origin of this frame is the centroid of the IMU. At the beginning time, the Ys is defined to coincide with the Yg. The Xs is perpendicular with the Ys in the same plane. The Zs axis is orthogonal to both Xs and Ys, which make up a right-hand orthogonal frame. Because the non-orthogonal angles between the gyros and accelerometers are not considered here, the errors between the IMU frame, gyro frame, and accelerometer frame are considered as zero. The S frame is strapped to the turntable and rotates with it. At the beginning time, the S frame coincides with the n frame. At the same time, the angles of the two encoders mounted on the gimbals are marked as zero.
3.2. Turntable Frame
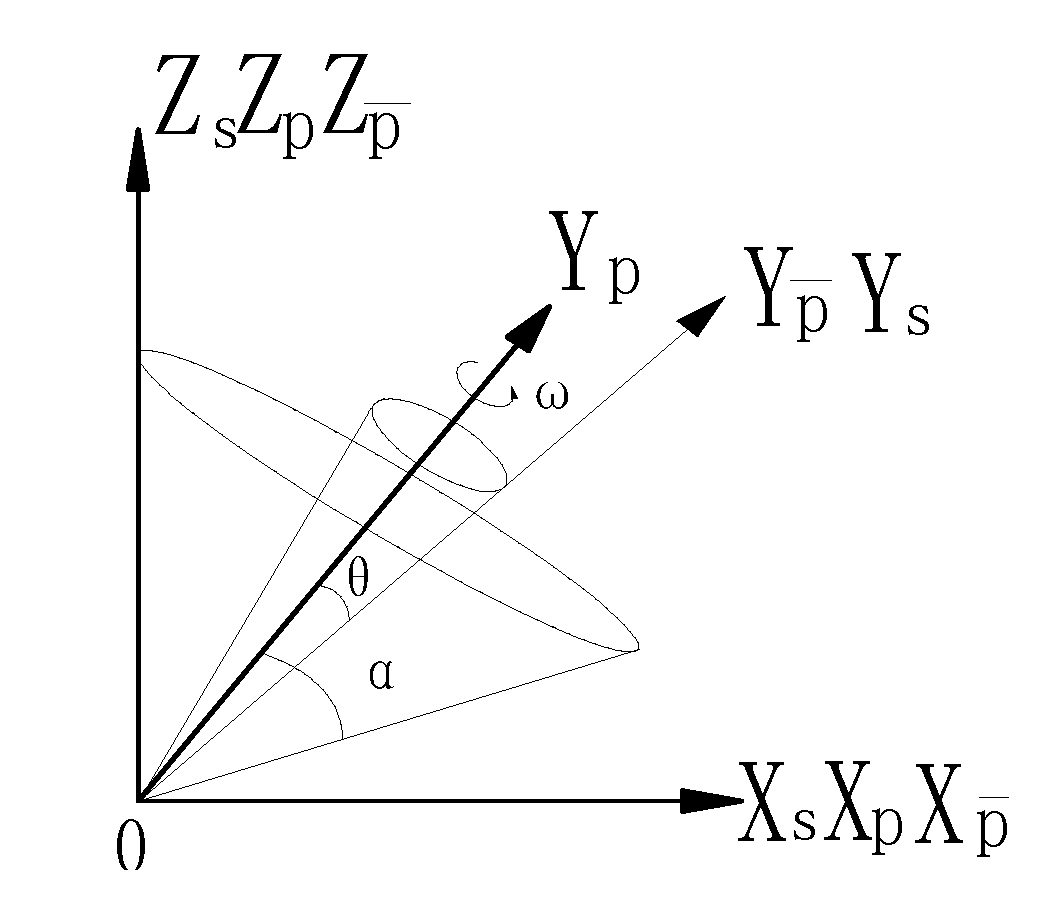
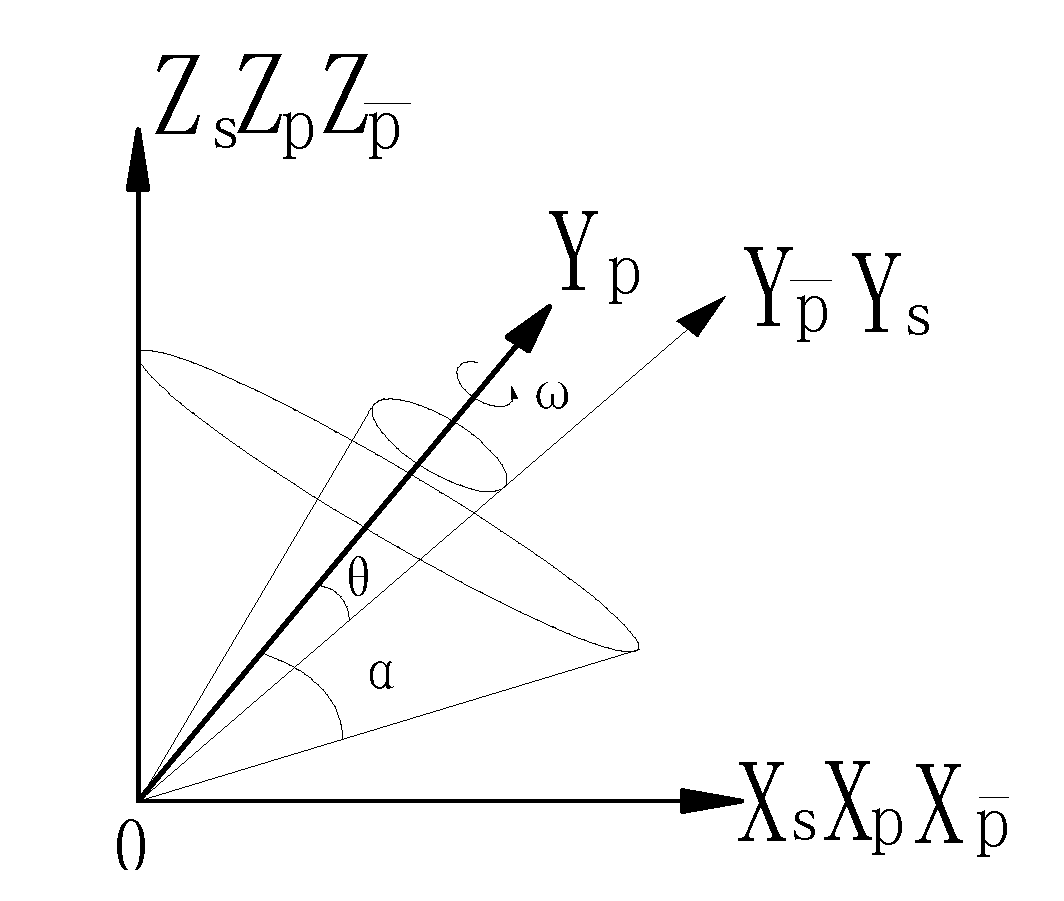
The turntable frame, denoted by P, is defined by the turntable’s two axes as a real frame. The Yp axis is defined to coincide with the direction of the outer axis of the turntable. The Zp axis is consistent with the inner axis of the turntable. The Xp axis is orthogonal to both Yp and Zp axes and makes up a right-hand orthogonal frame. The P frame is a non-orthogonal frame because the Zp axis is not perpendicular to the Yp axis. This frame can be also expressed as {Yp × Zp ,Yp, Zp} Of course, it is a dynamic coordinate system.
3.3. Modulation Average Frame
The modulation average frame, denoted by , is an orthogonal coordinate system. Since the P frame is non-orthogonal, it is necessary to build a new orthogonal frame so that the navigation parameter resolution can be calculated in this frame. In order to simplify the calculation and using the projection method, we define the axis, the axis overlap with the Zp axis, and the Xp axis, respectively, when the P frame is in the initial state. The axis is orthogonal to both and axes and makes up a right-hand orthogonal frame. This frame can be also expressed as {Yp × Zp , Zp × (Yp × Zp), Zp}. The misalignment angle between the frame and the n frame is considered as zero to simplify the calibration. This frame is a dynamic coordinate system rotating with the turntable.
3.4. Body Frame
The body frame, denoted by b, is rigidly attached to the vehicle. The Xb axis points rightward, the Yb axis points forward, and the Zb axis points upwards. The origin of this frame is in the centroid of the vehicle. In the initial state, the body frame coincides with the frame.
3.5. Navigation Frame
The navigation frame, denoted by n, is defined by the East-North-Up geographic frame. The Xn axis points in the direction of geodetic east. The Yn axis points in the direction of geodetic north. The Zn axis points in the direction of geodetic vertical. The attitude of the ship is defined by the Euler angles of the body frame with respect to the corresponding navigation frame.
5. Calibration Method
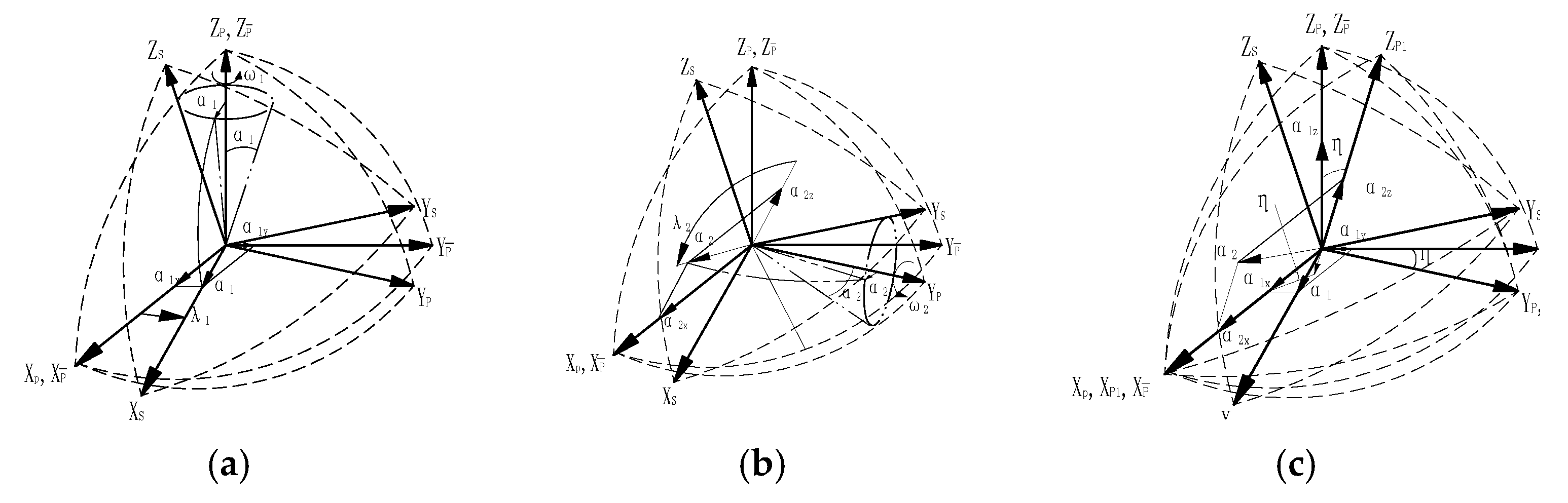
Before calibrating the model parameters of the shaft swing angle (α
1, ϕ
1), (α
2, ϕ
2), and the non-orthogonal angle η, traditional methods should be used to calibrate and compensate for the IMU errors in the conventional sensor model. Then the mounting errors should be calibrated using the method mentioned in article [
17].
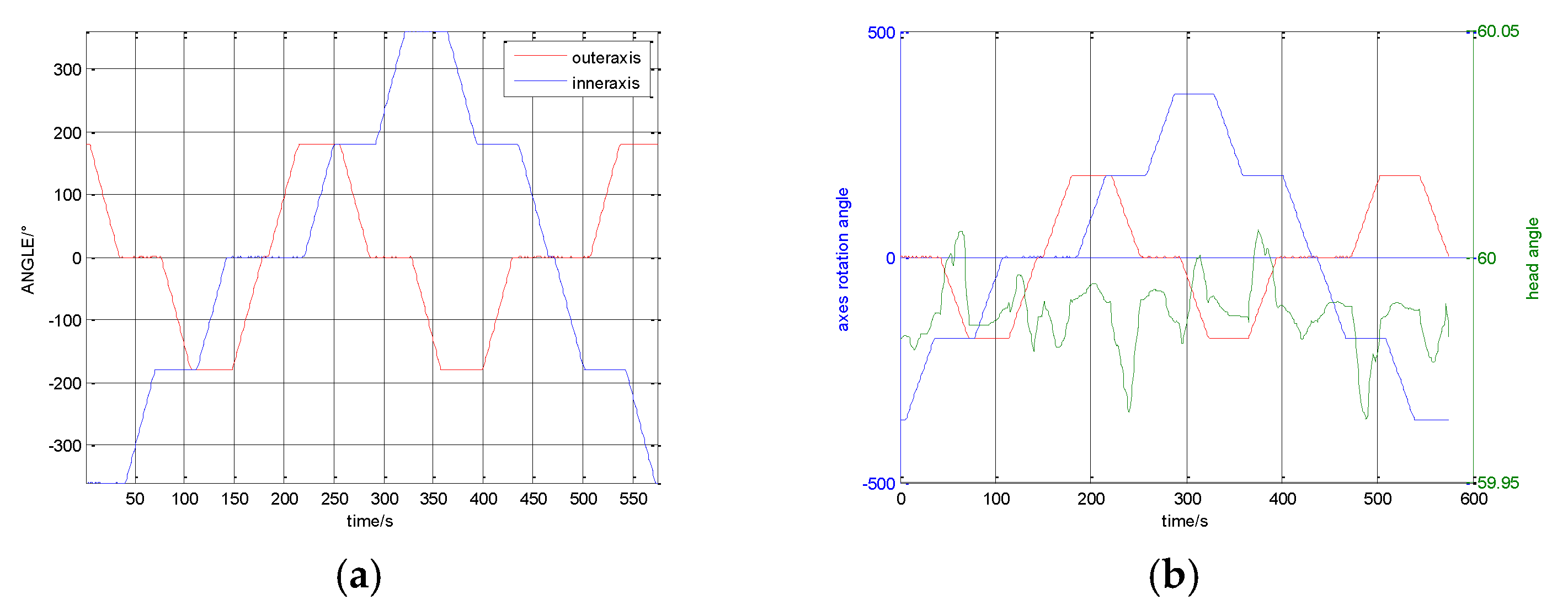
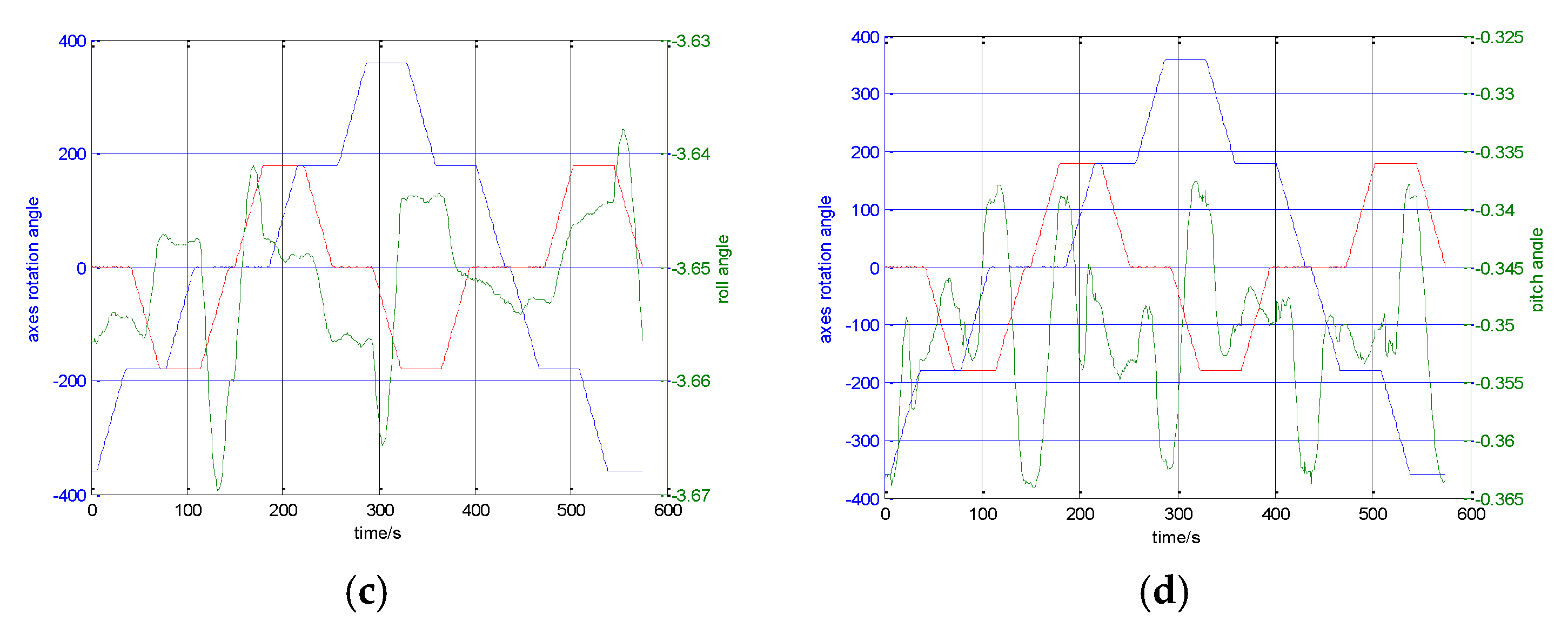
The parameters (α1, ϕ1), (α2, ϕ2), and η can be calibrated by using the difference between the in-situ test data and the known attitude angle. The roll and pitch angles are zero when the system is set on a horizontal basement. At the same time, the head angle is a fixed value. We can use this information to calibrate the parameters by the Kalman filter.
The state vectors of the filter can be set as:
The measurement vectors are
From Equation (28), the measurement equation is
where H is the measurement matrix.
υ is the measurement noise that has the nature of white noise. It satisfies
where R is a symmetic, positive, definite matrix.
is the Kronecher δ function.
Suppose that x
0 has
as its mean value and P
0 as the covariance matrix is independent with {υ}. Thus, the state Kalman filter is
According to the measurement vector z(t
k), the filter state estimation vector
can be obtained. When the output of the filter is stable, the estimated variables converge to the true value, and the calibration process is over. After obtaining the estimate of the variables, the shaft swing angle and the non-orthogonal angle can be calculated as follows:
7. Conclusions
In this paper, we found that the shaft swing angle and the non-orthogonal angle are inevitable errors after analyzing the structure of the dual-axis rotation INS, and they are also coning errors. They not only can reduce the accuracy of the attitude, but can also reduce the position accuracy of the dual-axis rotation INS in long-term navigation. In order to improve the attitude accuracy further, a calibration method is proposed in this paper. Specifically, the following contributions have been made:
The modulation average frame is established. The attitude transformation matrix , attitude, and its error equations including the shaft swing angle and non-orthogonal angle are mainly derived in the frame . The static Kalman filter is used to estimate the coning angles (α1,α2), initial phase angles (ϕ1,ϕ2), and non-perpendicular angle (η).
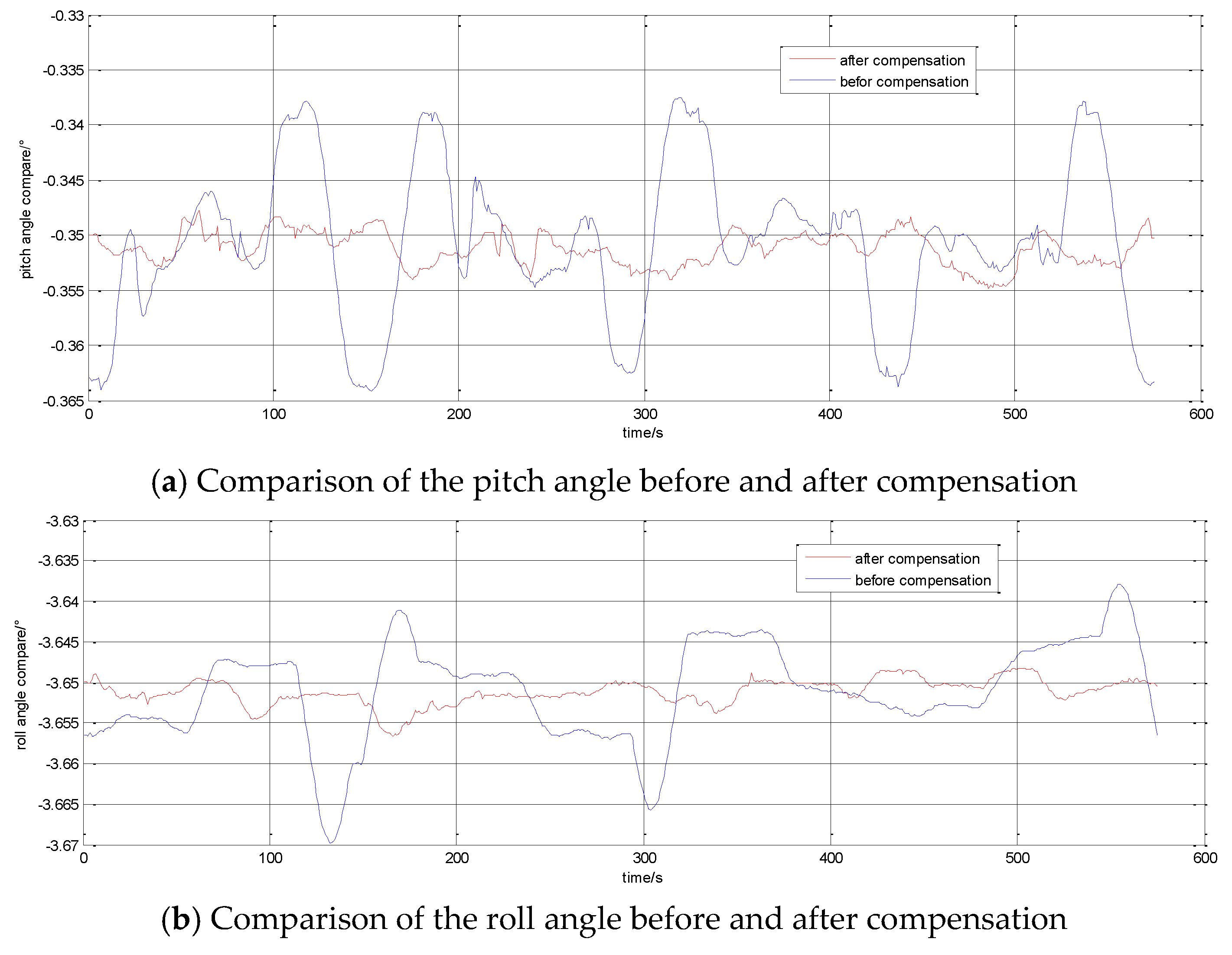
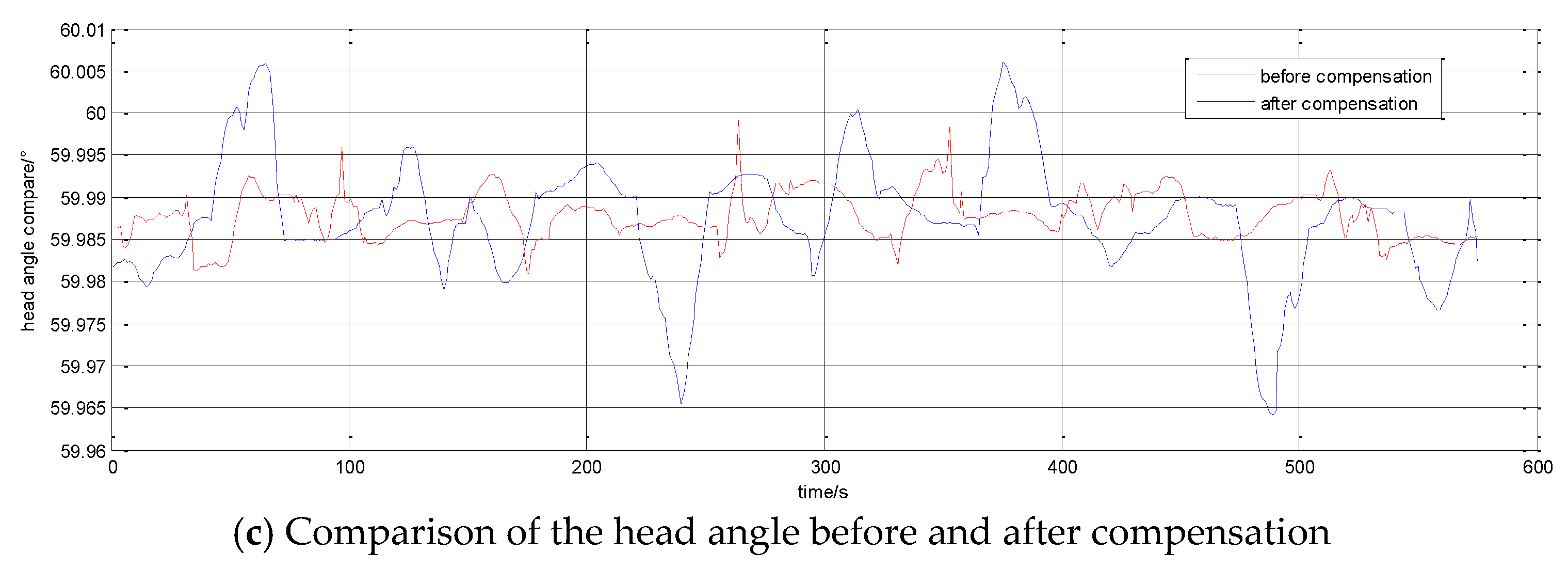
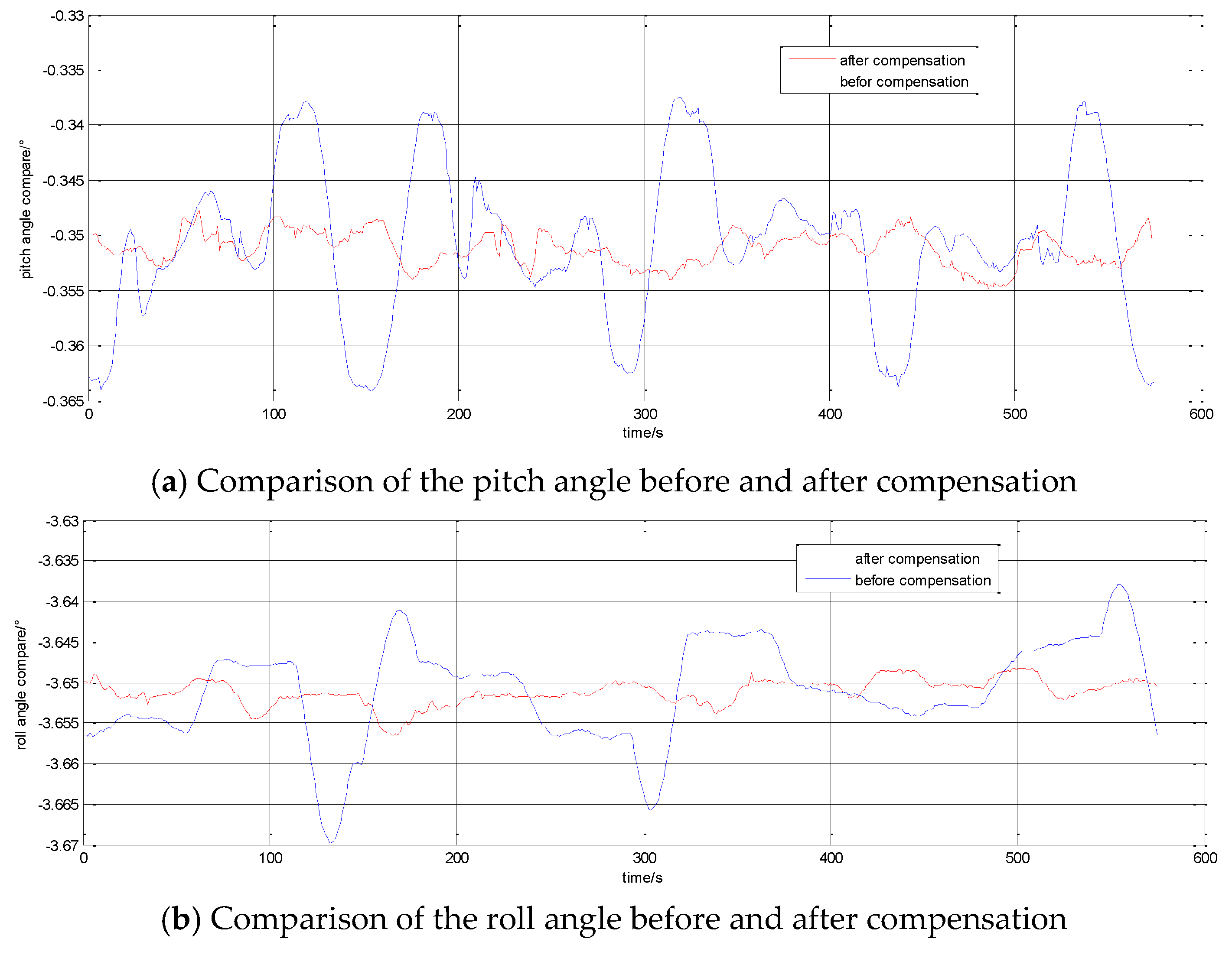
Through the simulation and the static verification of the actual system, the results show that the calibration method is feasible. The attitude accuracy increased about 20%–30% after the precise compensation. The attitude error equation is reasonably simplified and the calibration method is accurate enough.
At the same time, we found that there are still slight perturbations of the attitude angle curve. This is caused by two factors; one is the encoder reading angle, and the other is the shaft swing angle that is not a fixed value. Furthermore, the calibration is established under the static condition and is not feasible for a ship at the docking side. For a wider range of applications, the static Kalman filter based on disturbed specific forces should be designed to identify the model coefficients.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}