
A Mobility-Aware Adaptive Duty Cycling Mechanism for Tracking Objects during Tunnel Excavation


Abstract
:1. Introduction
2. Background and Related Work
2.1. Duty Cycling Concept
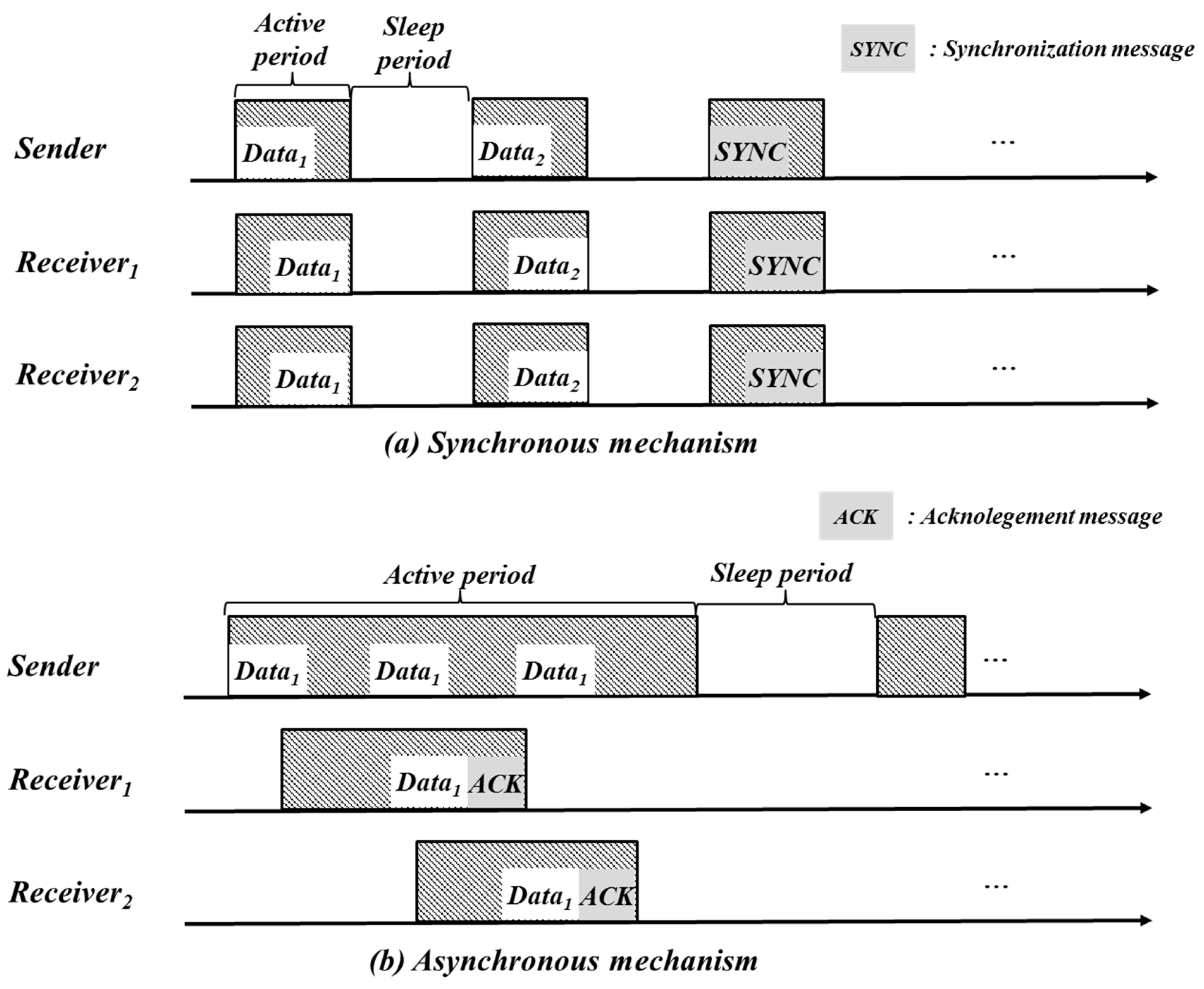
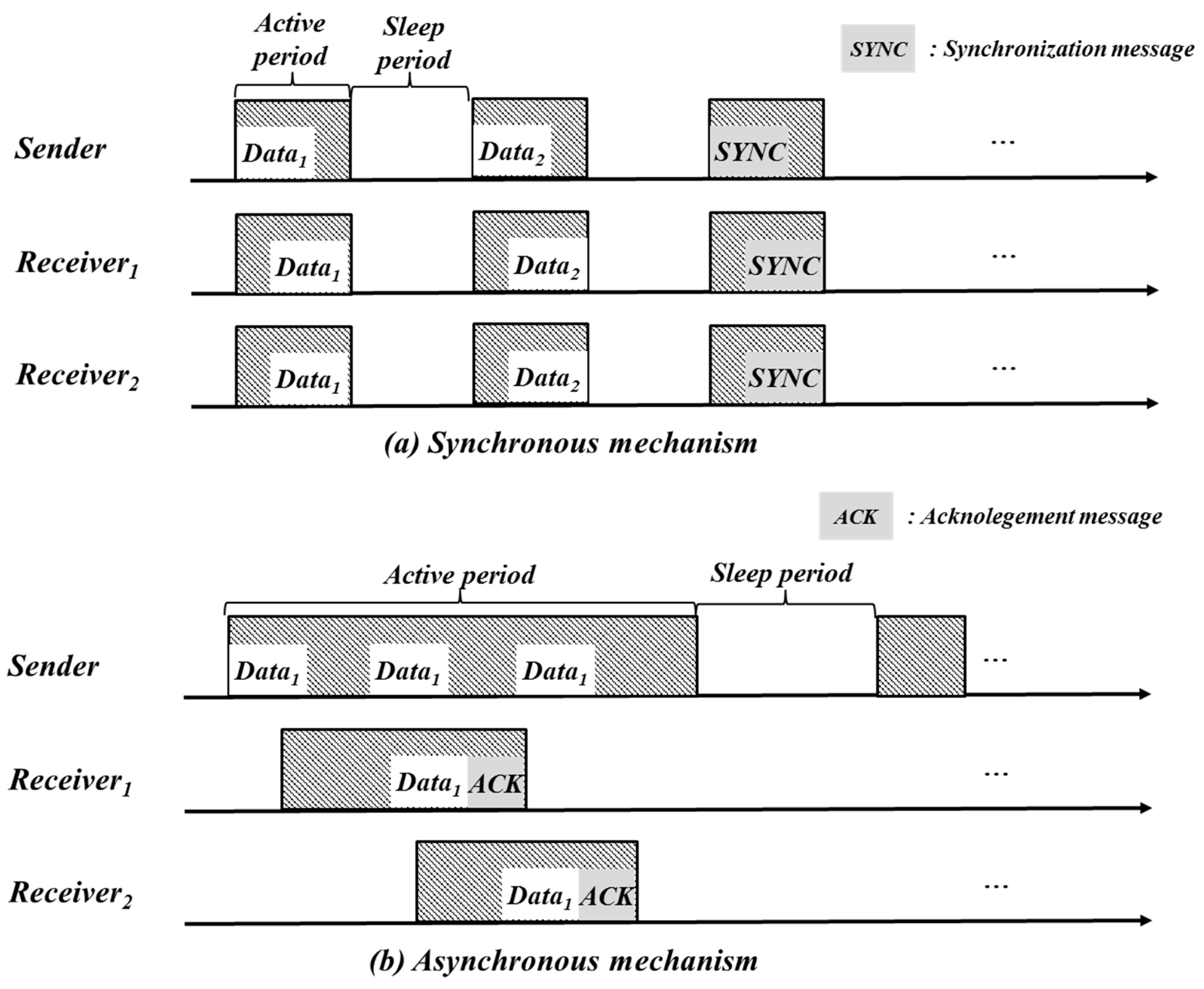
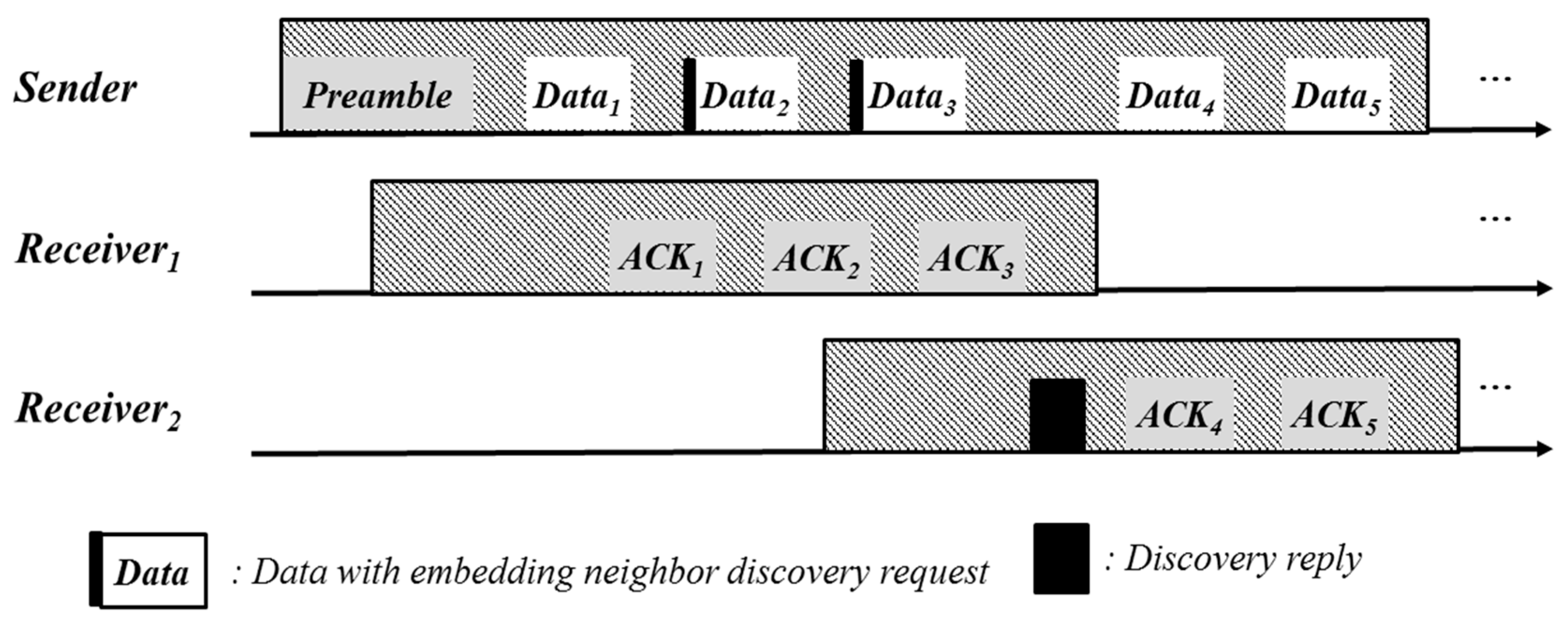
2.2. Synchronous and Asynchronous Duty Cycling
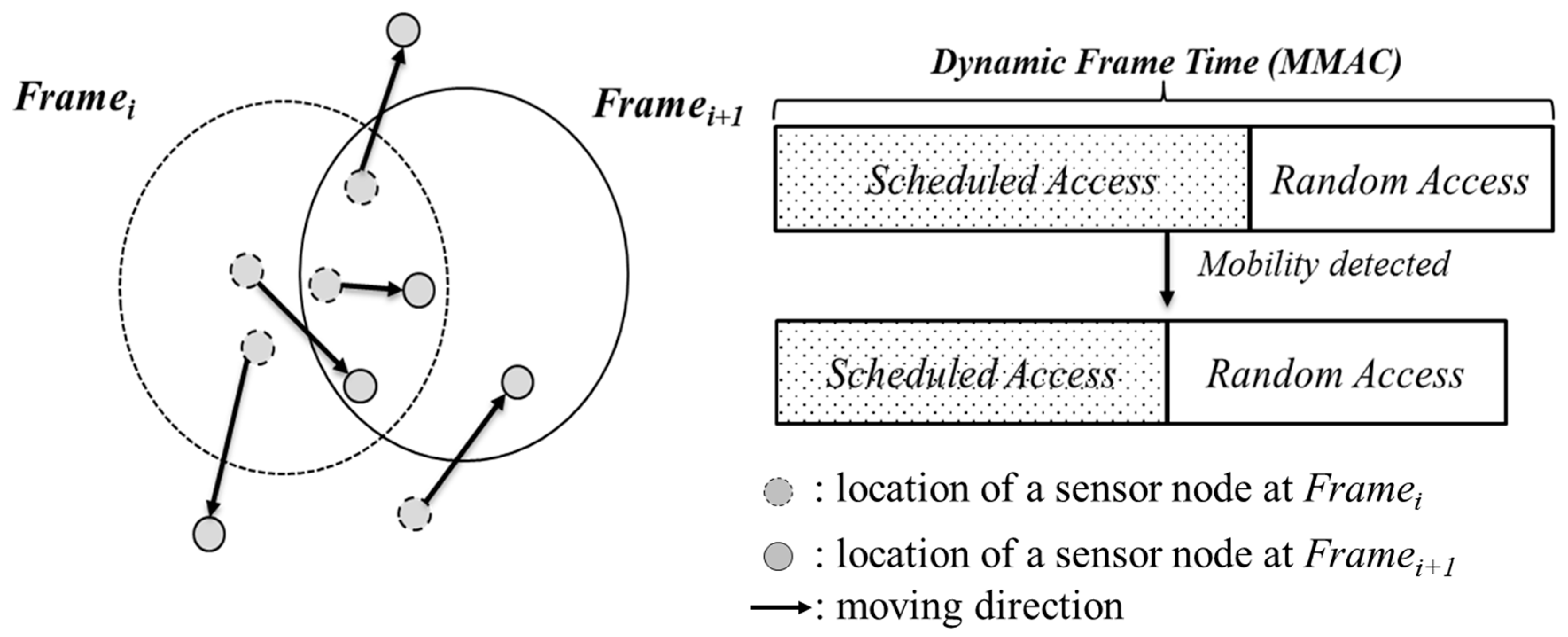
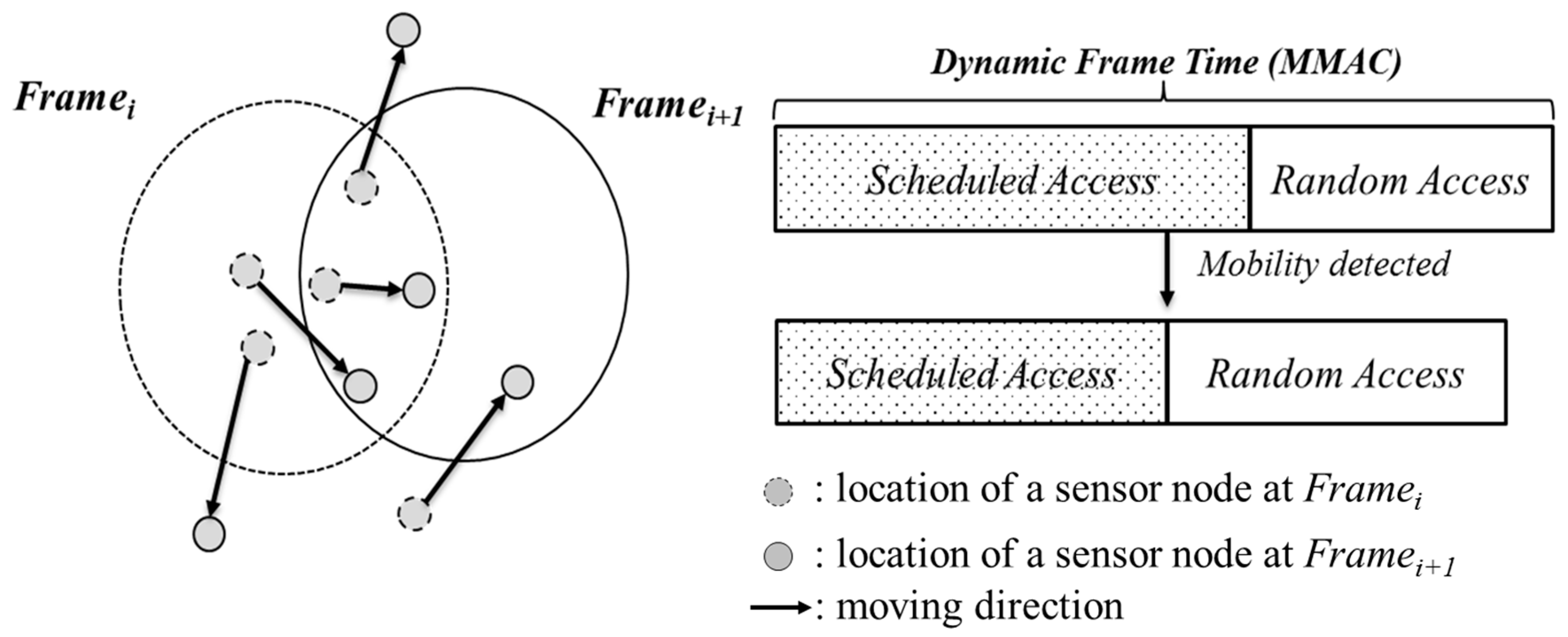
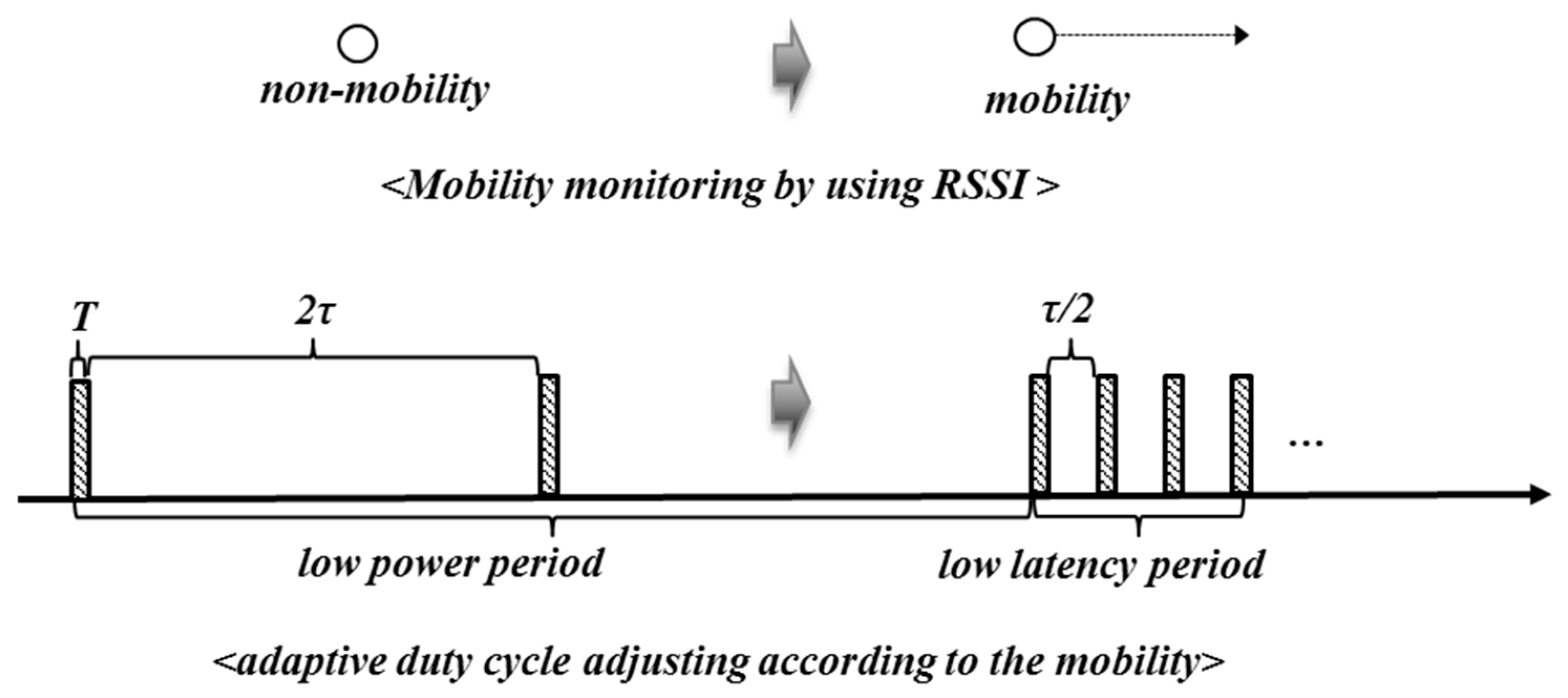
2.3. Adaptive Duty Cycling Based on Mobility
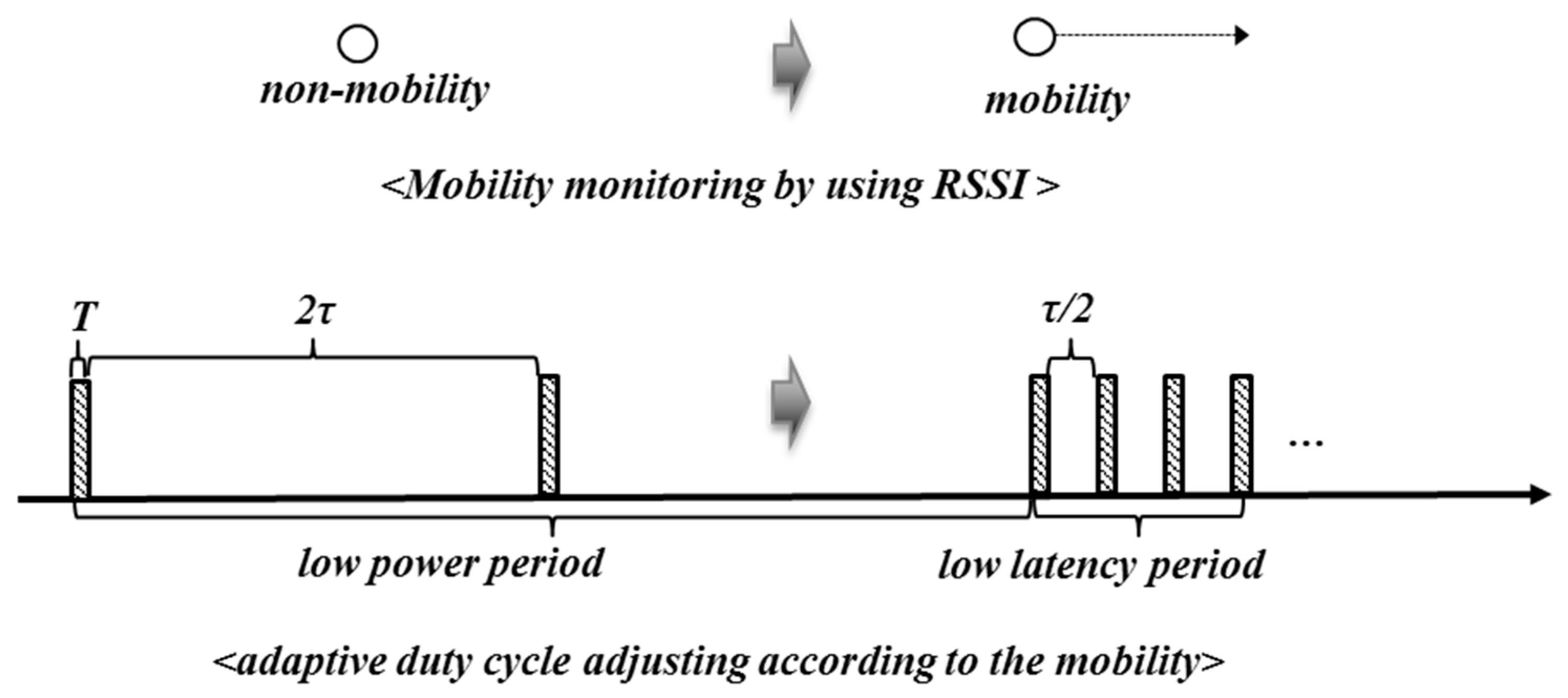
3. Mobility-Aware Adaptive Duty Cycling Mechanism in Tunnel Excavation
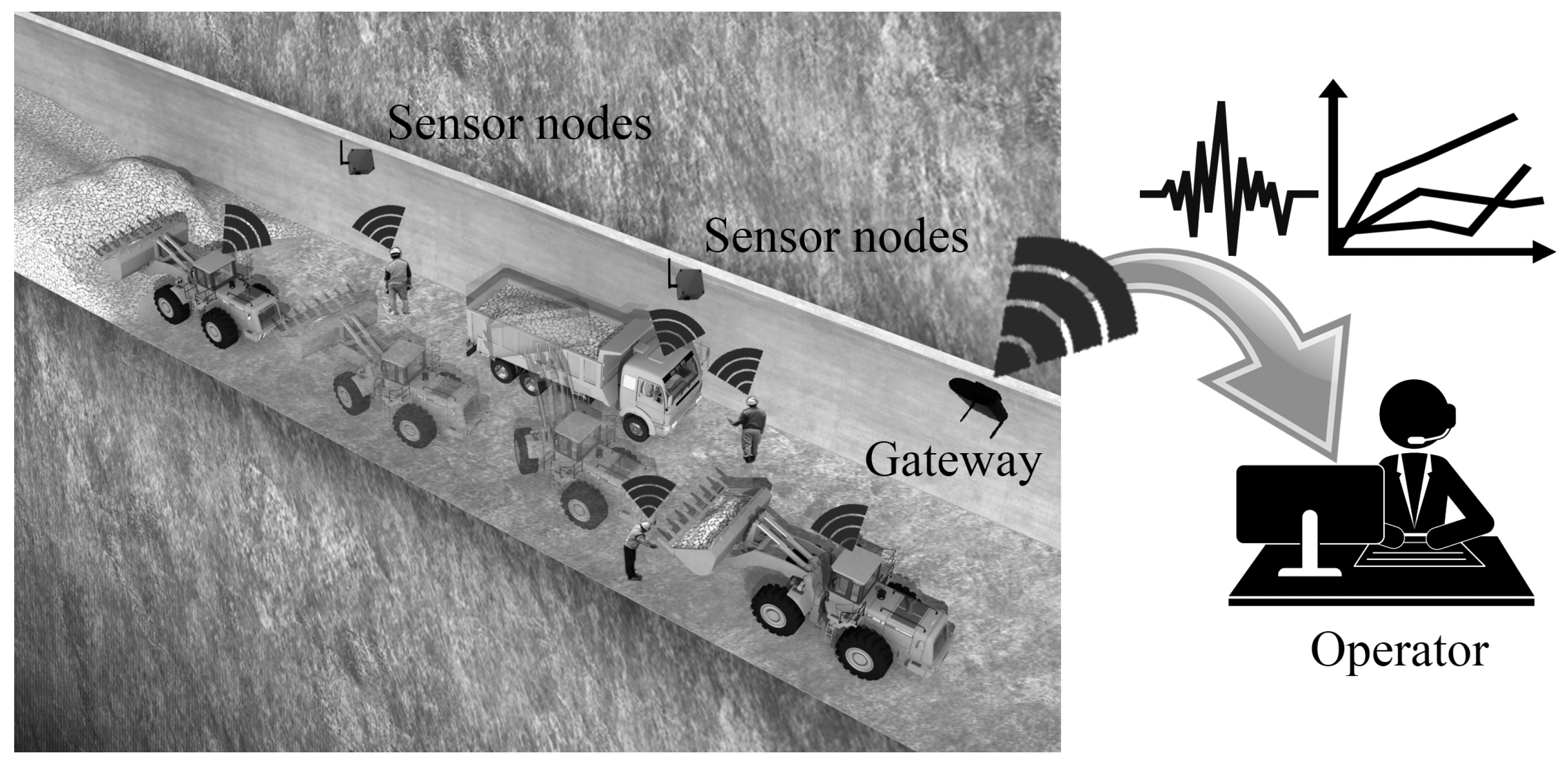
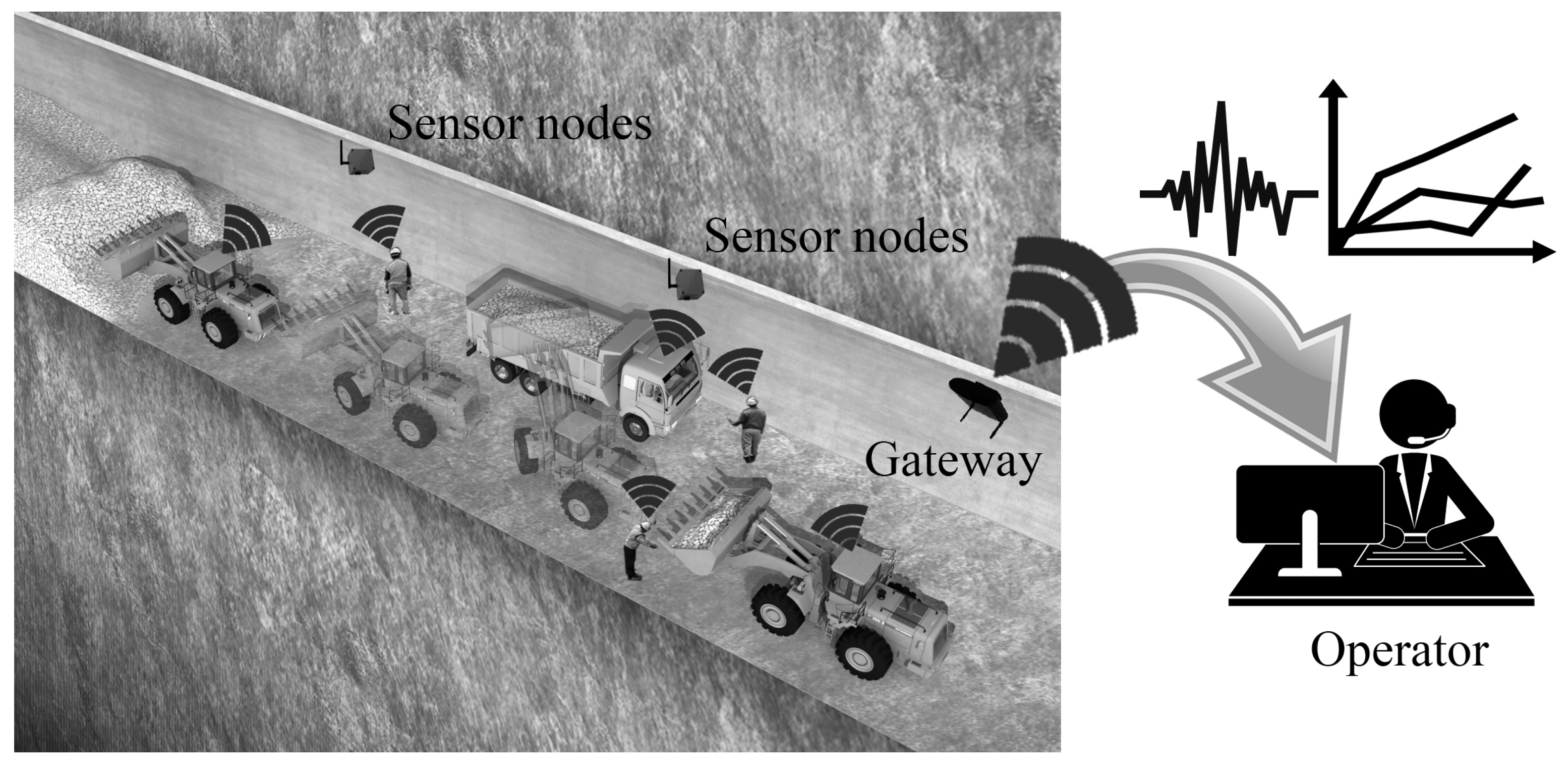
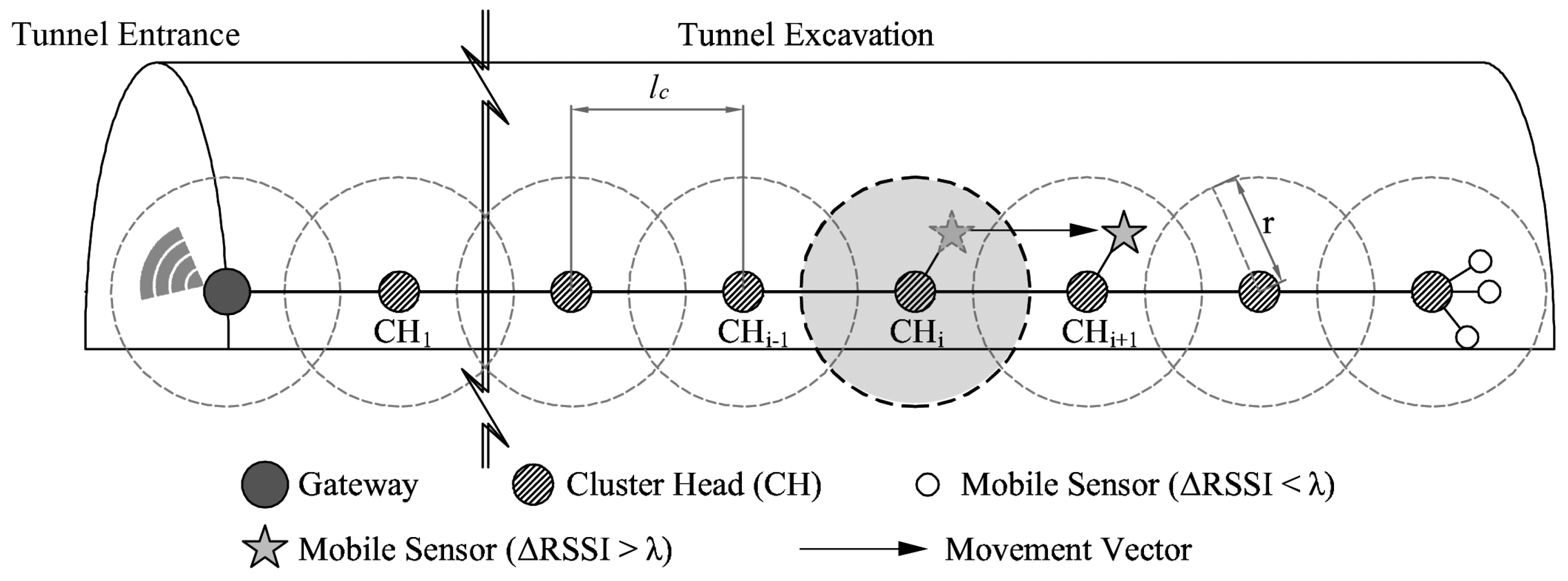
3.1. Tracking Objects
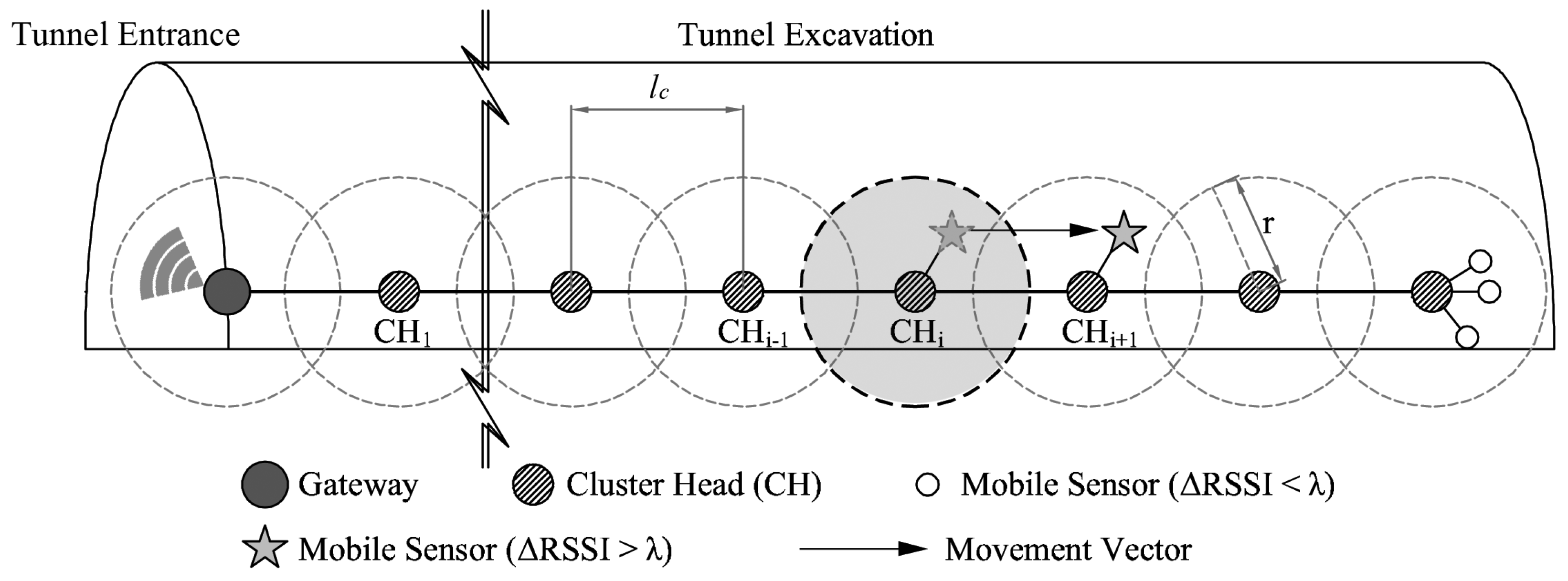
3.2. Network Model
3.3. Energy Saving Strategy
4. Analysis and Evaluation
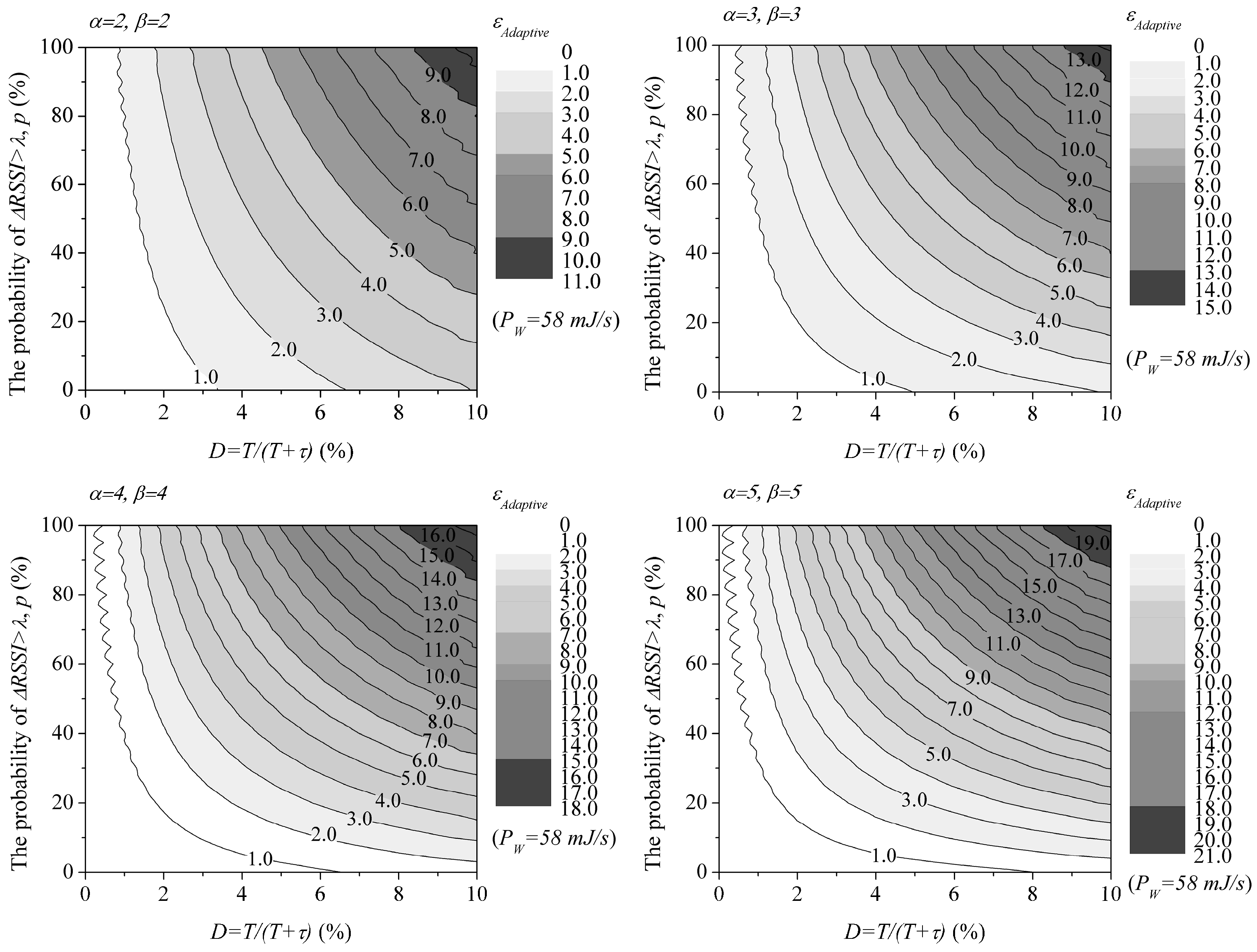
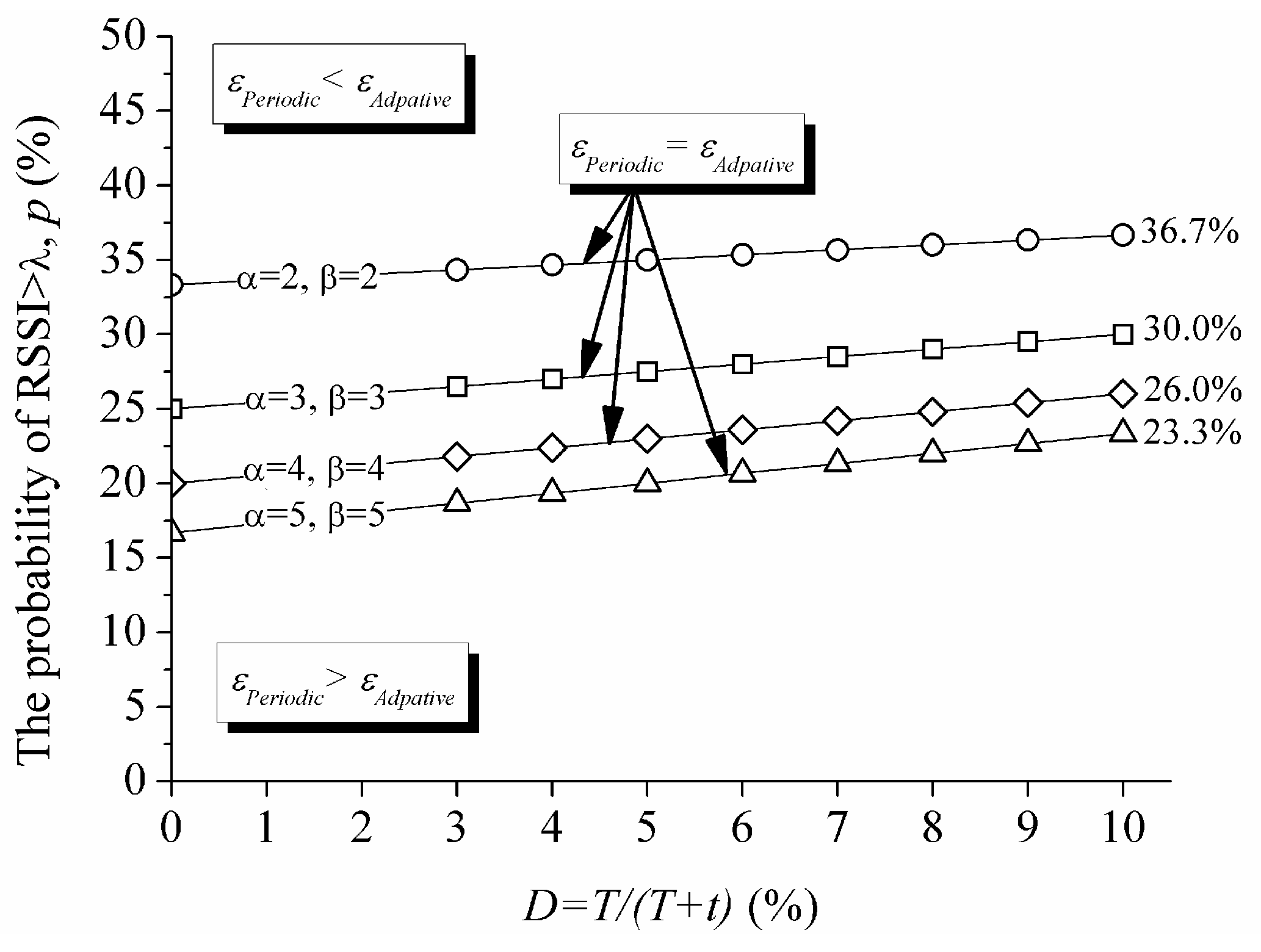
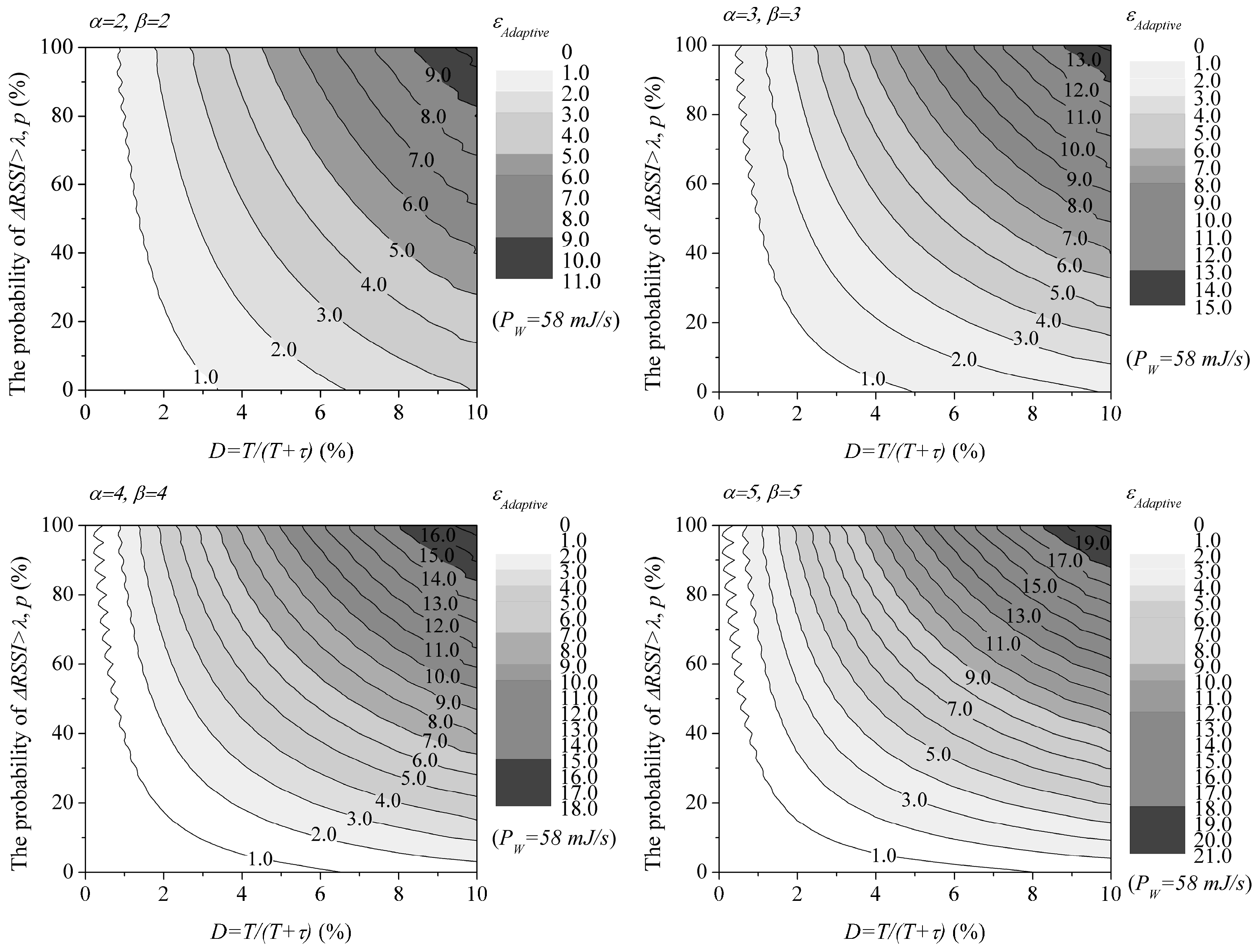
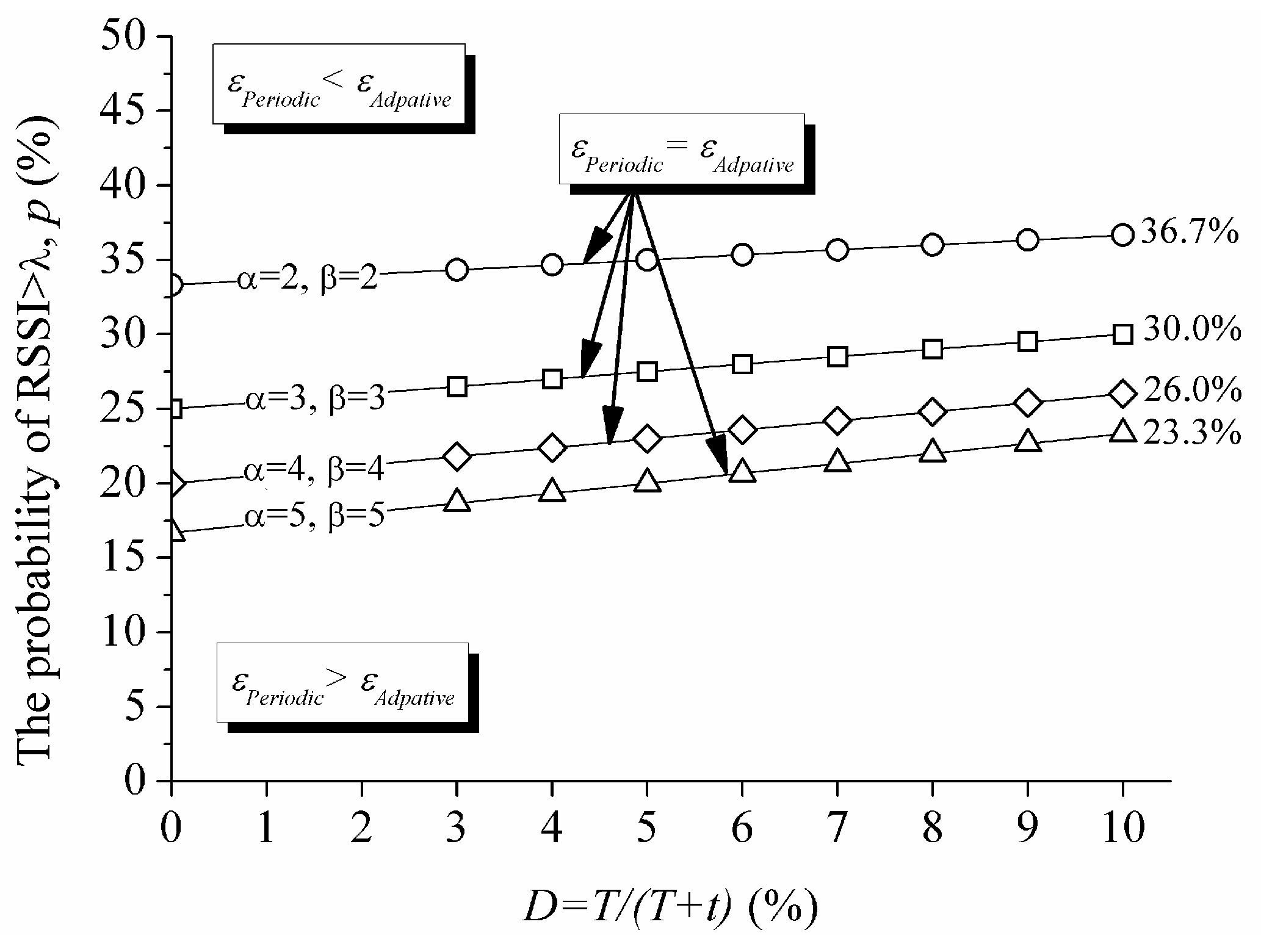
4.1. Energy Consumption
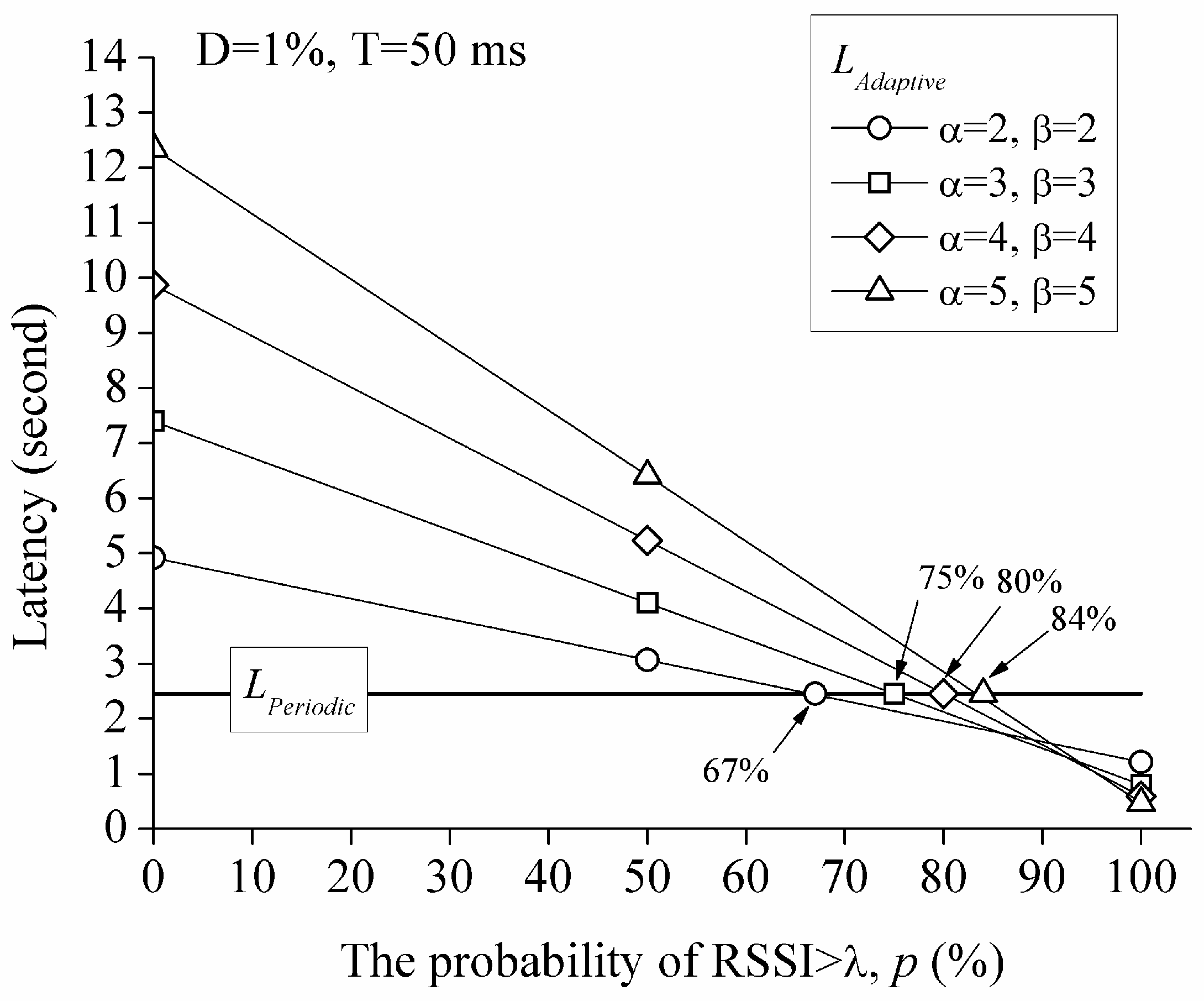
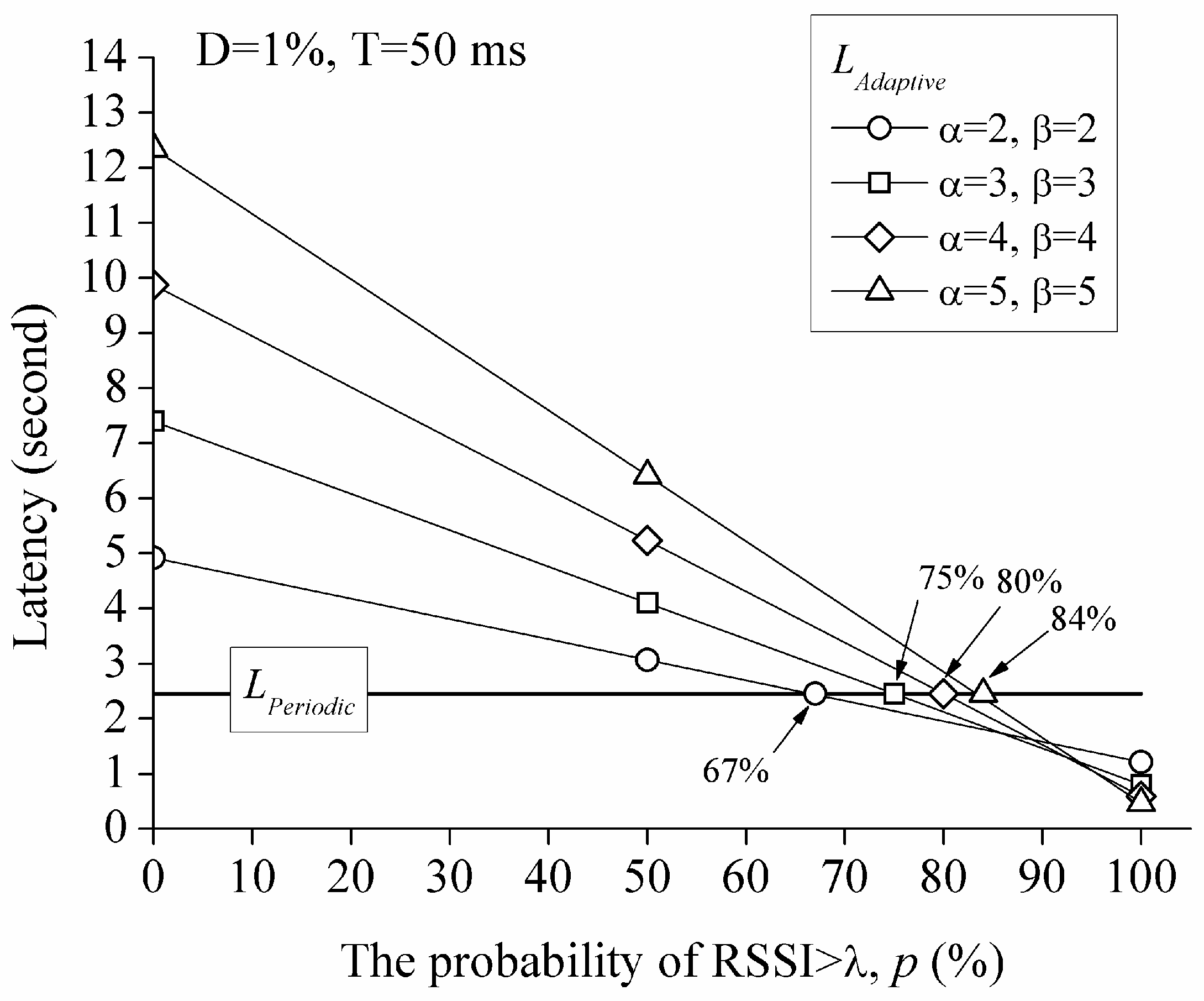
4.2. Expected Latency
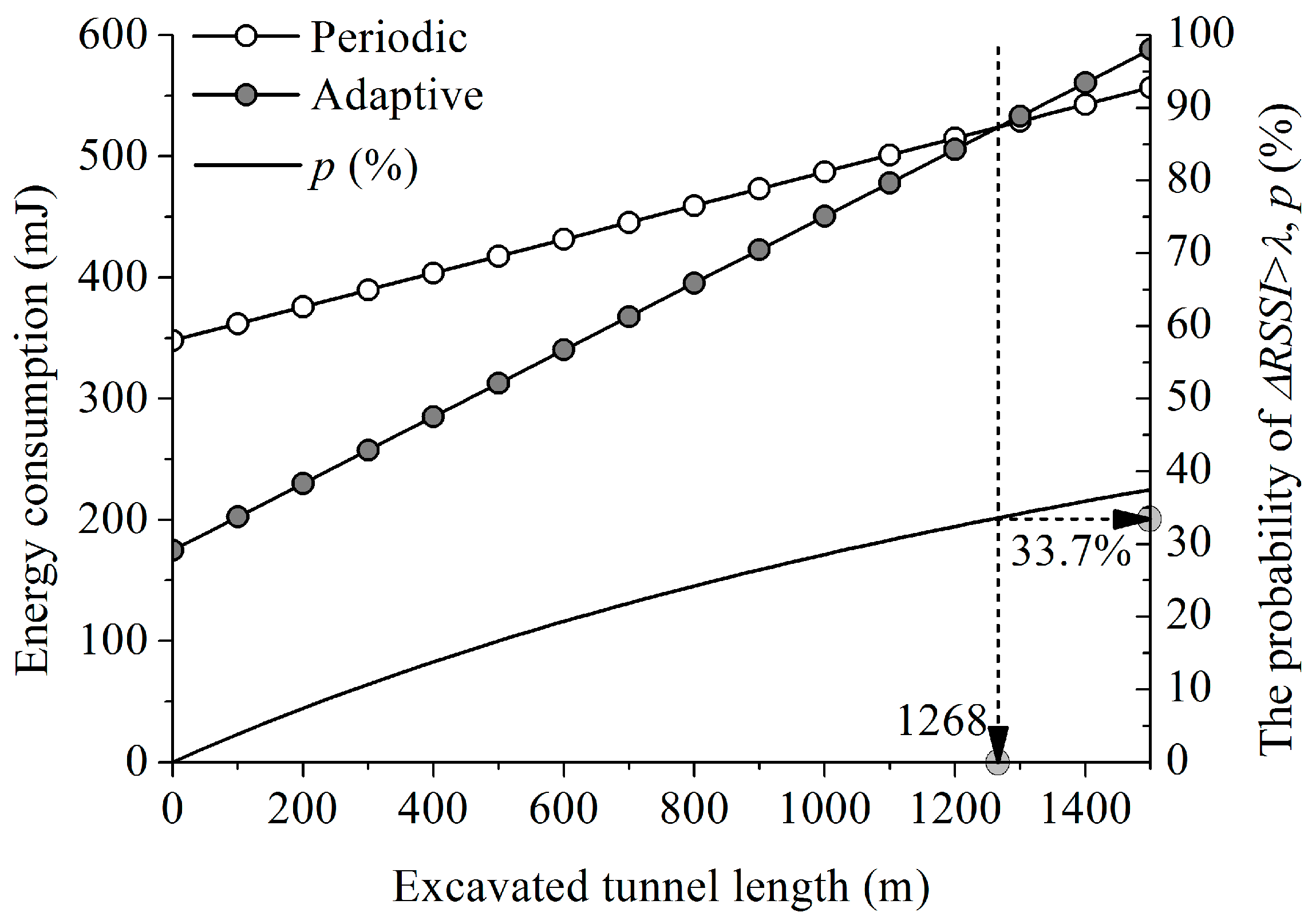
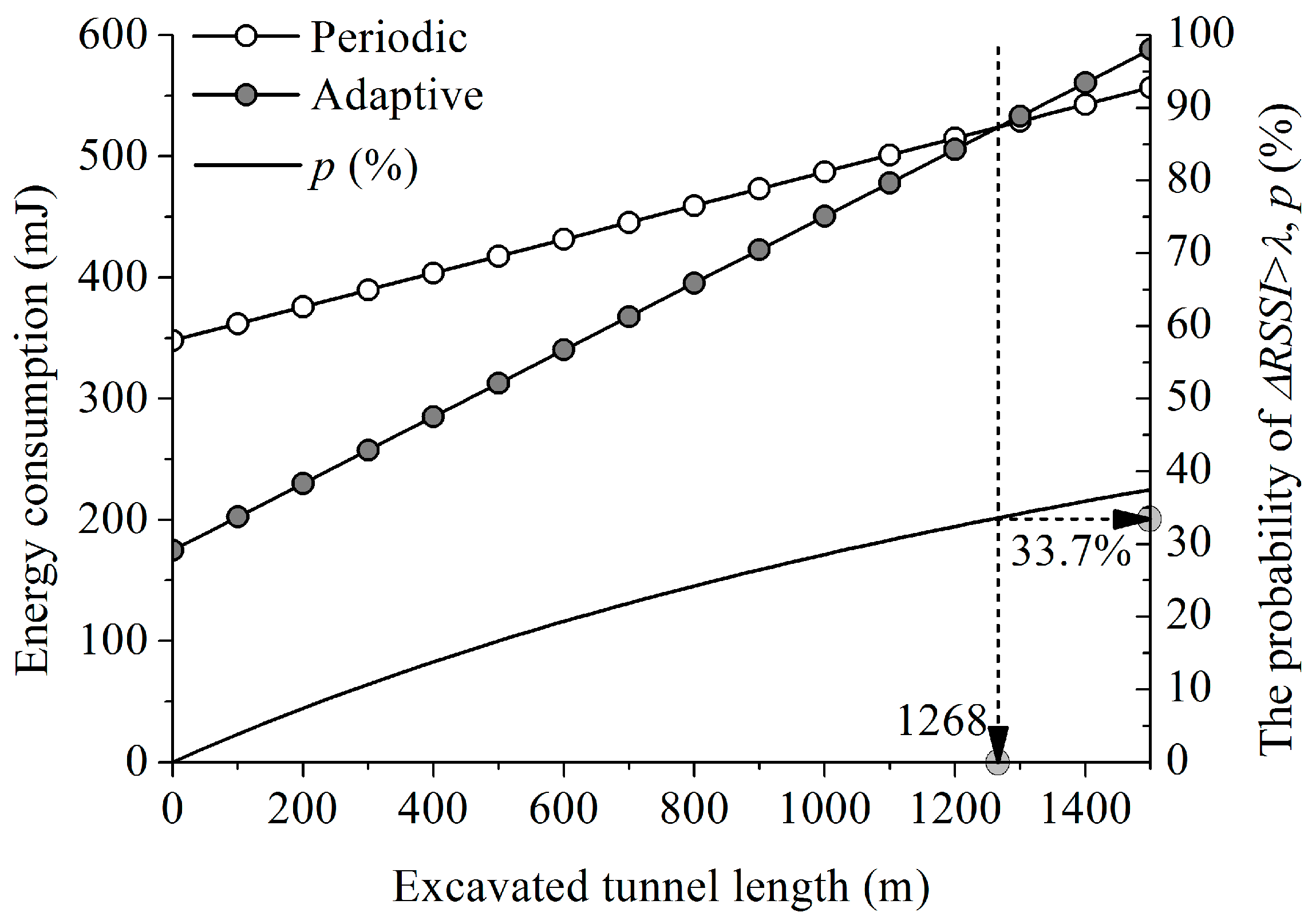
4.3. Evaluation in Tunnel Excavation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Construction Safety Management Information System. Available online: http://www.cosmis.or.kr (accessed on 4 June 2016).
- Henshaw, J.L. Underground Construction (Tunneling), Occupational Safety and Health Administration, OSHA 3315-06R 2003. Available online: https://www.osha.gov/Publications/osha3115.pdf (accessed on 18 June 2016).
- Pascale, A.; Nicoli, M.; Deflorio, F.; Chiara, B.D.; Spangolini, U. Wireless sensor networks for traffic management and road safety. IET Intell. Transp. Syst. 2012, 6, 66–77. [Google Scholar] [CrossRef]
- Akerberg, J.; Gidlund, M.; Bjorkman, M. Future Research Challenges in Wireless Sensor and Actuator Networks Targeting Industrial Automation. In Proceedings of the 9th IEEE International Conference on Industrial Informatics, Caprica, Lisbon, Portugal, 26–29 July 2011; pp. 410–415.
- We, W.; Yang, H.; Li, Q.; Chew, D. An integrated information management model for proactive prevention of struck-by-falling-object accidents on construction sites. Autom. Constr. 2013, 34, 67–74. [Google Scholar] [Green Version]
- Carrano, R.C.; Passos, D.; Magalhaes, L.; Albuquerque, C. Survey and Taxonomy of Duty Cycling Mechanisms in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 181–194. [Google Scholar] [CrossRef]
- Zhang, X.; Shin, K.G. E-MiLi: Energy-Minimizing Idle Listening in Wireless Networks. IEEE Trans. Mob. Comput. 2012, 11, 1441–1454. [Google Scholar] [CrossRef]
- Rasul, A.; Erlebach, T. Reducing Idle Listening during Data Collection in Wireless Sensor Networks. In Proceedings of the 10th International Conference on Mobile Ad-Hoc and Sensor Networks, Maui, HI, USA, 19–21 December 2014; pp. 17–23.
- Spenza, D.; Magno, M.; Basagni, S.; Benini, L.; Paoli, M.; Petrioli, C. Beyond duty cycling: Wake-up radio with selective awakenings for long-lived wireless sensing systems. In Proceedings of the IEEE Conference on Computer Communications, Hong Kong, China, 26 April–1 May 2015; pp. 522–530.
- Han, K.; Luo, J.; Liu, Y.; Vasilakos, A.V. Algorithm design for data communications in duty-cycled wireless sensor networks: A survey. IEEE Commun. Mag. 2013, 51, 107–113. [Google Scholar] [CrossRef]
- Carrano, R.C.; Passos, D.; Magalhães, L.; Albuquerque, C. A comprehensive analysis on the use of schedule-based asynchronous duty cycling in wireless sensor networks. Ad Hoc Netw. 2014, 16, 142–164. [Google Scholar] [CrossRef]
- Ye, W.; Heidemann, J.; Estrin, D. An Energy-Efficient MAC protocol for Wireless Sensor Networks. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies, New York, NY, USA, 23–27 June 2002; pp. 1567–1576.
- Dam, T.V.; Langendoen, K. An adaptive energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 171–180.
- Polastre, J.; Hill, J.; Culler, D. Versatile low power media access for wireless sensor networks. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 95–107.
- Buettner, M.; Yee, G.V.; Anderson, E.; Han, R. X-MAC: A short preamble MAC protocol for duty-cycled wireless sensor networks. In Proceedings of the 4th International Conference on Embedded Networked Sensor Systems, Boulder, CO, USA, 1–3 November 2006; pp. 307–320.
- Dunkels, A. The ContikiMAC Radio Duty Cycling Protocol. SICS Technical Reports. Available online: http://soda.swedishict.se/5128 (accessed on 3 May 2016).
- Pham, H.; Jha, S. An adaptive mobility-aware MAC protocol for sensor networks (MS-MAC). In Proceedings of the 1st IEEE International Conference on Mobile Ad-Hoc and Sensor Systems, Fort Lauderdale, FL, USA, 25–27 October 2004; pp. 558–560.
- Khorov, E.; Lyakhov, A.; Krotov, A.; Guschin, A. A survey on IEEE 802.11ah: An enabling networking technology for smart cities. Comput. Commun. 2014, 58, 52–69. [Google Scholar] [CrossRef]
- Ali, M.; Suleman, T.; Uzmi, Z.A. MMAC: A mobility-adaptive, collision-free mac protocol for wireless sensor networks. In Proceedings of the 24th IEEE International Performance, Computing, and Communications Conference, Phoenix, AZ, USA, 7–9 April 2005; pp. 401–407.
- Nabi, M.; Blagojevic, M.; Geilen, M.; Basten, T.; Hendriks, T. MCMAC: An optimized medium access control protocol for mobile clusters in wireless sensor networks. In Proceedings of the 7th Annual IEEE Communications Society Conference on Sensor Mesh and Ad Hoc Communications and Networks, Boston, MA, USA, 21–25 June 2010; pp. 1–9.
- Tang, Z.; Dargie, W. A mobility-aware medium access control protocol for wireless sensor networks. In Proceedings of the 5th IEEE International Workshop on Heterogeneous, Multi-Hop, Wireless and Mobile Networks, Miami, FL, USA, 6–10 December 2010; pp. 109–114.
- Razaque, A.; Elleithy, K.M. Low duty cycle, energy-efficient and mobility-based boarder node—MAC hybrid protocol for wireless sensor networks. J. Signal Process. Syst. 2015, 81, 265–284. [Google Scholar] [CrossRef]
- Farahani, S. ZigBee Wireless Networks and Transceivers; Elsevier: Burlington, MA, USA, 2011; pp. 1–23. [Google Scholar]
- Lu, W.; Huang, G.Q.; Li, H. Scenarios for applying RFID technology in construction project management. Autom. Constr. 2011, 20, 101–106. [Google Scholar] [CrossRef] [Green Version]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2000; pp. 1–10.
- Iqbal, A.; Akbar, M.; Javaid, N.; Bouk, S.H.; Ilahi, M.; Khan, R.D. Advanced LEACH: A Static Clustering-based Heteroneous Routing Protocol for WSNs. J. Basic Appl. Sci. 2013, 3, 864–872. [Google Scholar]
- Jawhar, I.; Mohamed, N.; Agrawal, D.P. Linear wireless sensor networks: Classification and applications. J. Netw. Comput. Appl. 2011, 34, 1671–1682. [Google Scholar] [CrossRef]
- Lee, S.; Cha, H. A grid-based tracking mechanism with satisfaction of energy conservation and guaranteed QoS in wireless sensor networks. In Information Networking. Advances in Data Communications and Wireless Networks, Proceedings of the International Conference on Information Networking, Sendai, Japan, 16–19 January 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 286–295. [Google Scholar]
- Amiri, M. Evaluation of lifetime bounds of wireless sensor networks. arXiv 2010. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| The change of RSSI value | |
| The probability that the of sensor nodes exceeds a threshold | |
| The wake-up time of duty cycle interval | |
| The sleep time of duty cycle interval | |
| D | The duty cycle (i.e.,) |
| The power for wake-up | |
| The expected energy consumption of periodic duty cycling mechanism with an fixed sleep time of | |
| The expected energy consumption of adaptive duty cycling mechanism with two adjusted sleep time, and , according to its change of RSSI value. | |
| The expected latency of periodic duty cycling mechanism with an fixed sleep time of | |
| The expected latency of adaptive duty cycling mechanism with two adjusted sleep time, and , according to its change of RSSI value |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, T.; Min, H.; Jung, J. A Mobility-Aware Adaptive Duty Cycling Mechanism for Tracking Objects during Tunnel Excavation. Sensors 2017, 17, 435. https://doi.org/10.3390/s17030435
Kim T, Min H, Jung J. A Mobility-Aware Adaptive Duty Cycling Mechanism for Tracking Objects during Tunnel Excavation. Sensors. 2017; 17(3):435. https://doi.org/10.3390/s17030435
Chicago/Turabian StyleKim, Taesik, Hong Min, and Jinman Jung. 2017. "A Mobility-Aware Adaptive Duty Cycling Mechanism for Tracking Objects during Tunnel Excavation" Sensors 17, no. 3: 435. https://doi.org/10.3390/s17030435
APA StyleKim, T., Min, H., & Jung, J. (2017). A Mobility-Aware Adaptive Duty Cycling Mechanism for Tracking Objects during Tunnel Excavation. Sensors, 17(3), 435. https://doi.org/10.3390/s17030435