
Combining CHAMP and Swarm Satellite Data to Invert the Lithospheric Magnetic Field in the Tibetan Plateau



Abstract
:1. Introduction
2. Mathematical Model and Inversion Method
2.1. Mathematical Model
2.2. Inversion Method
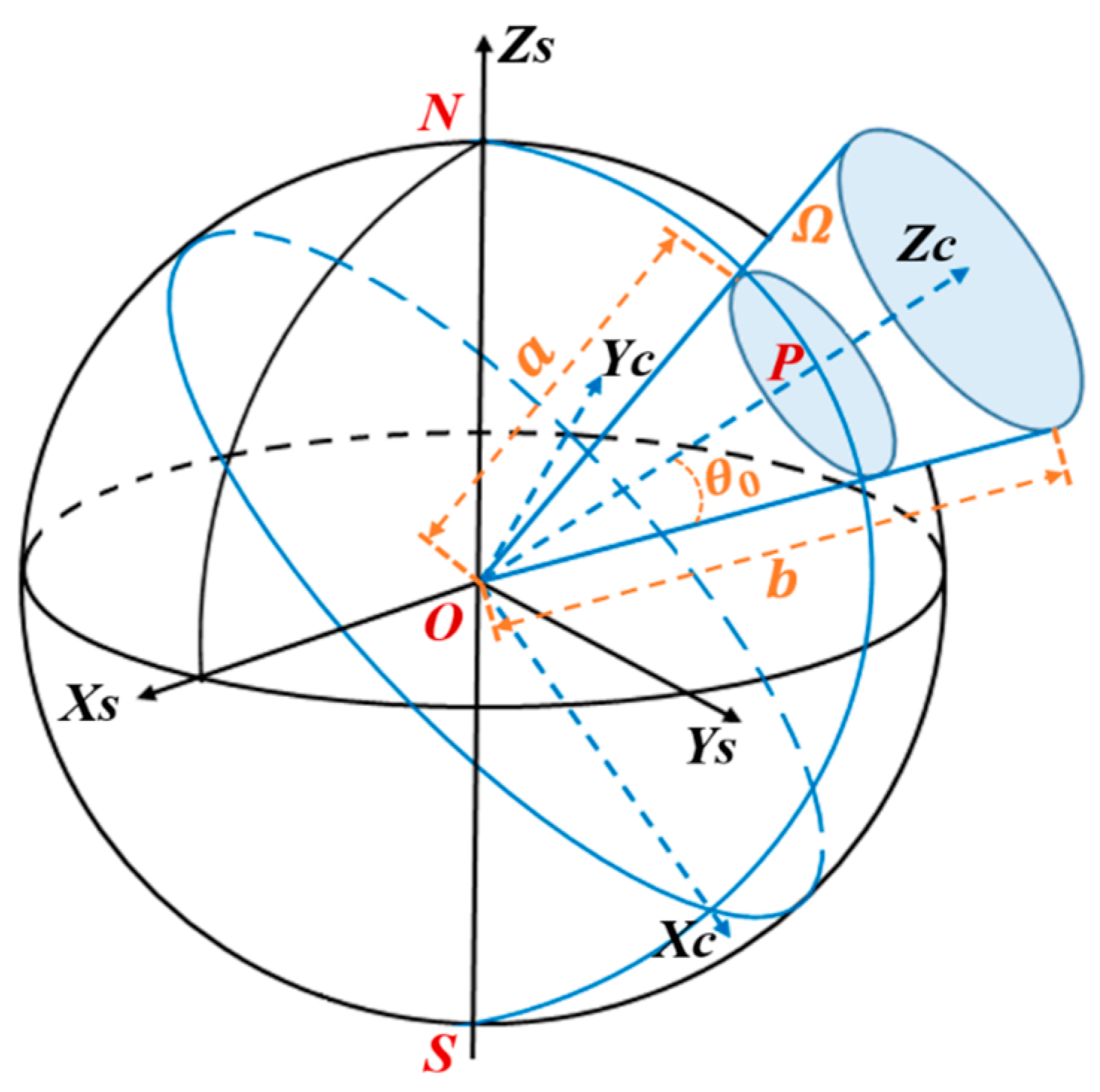
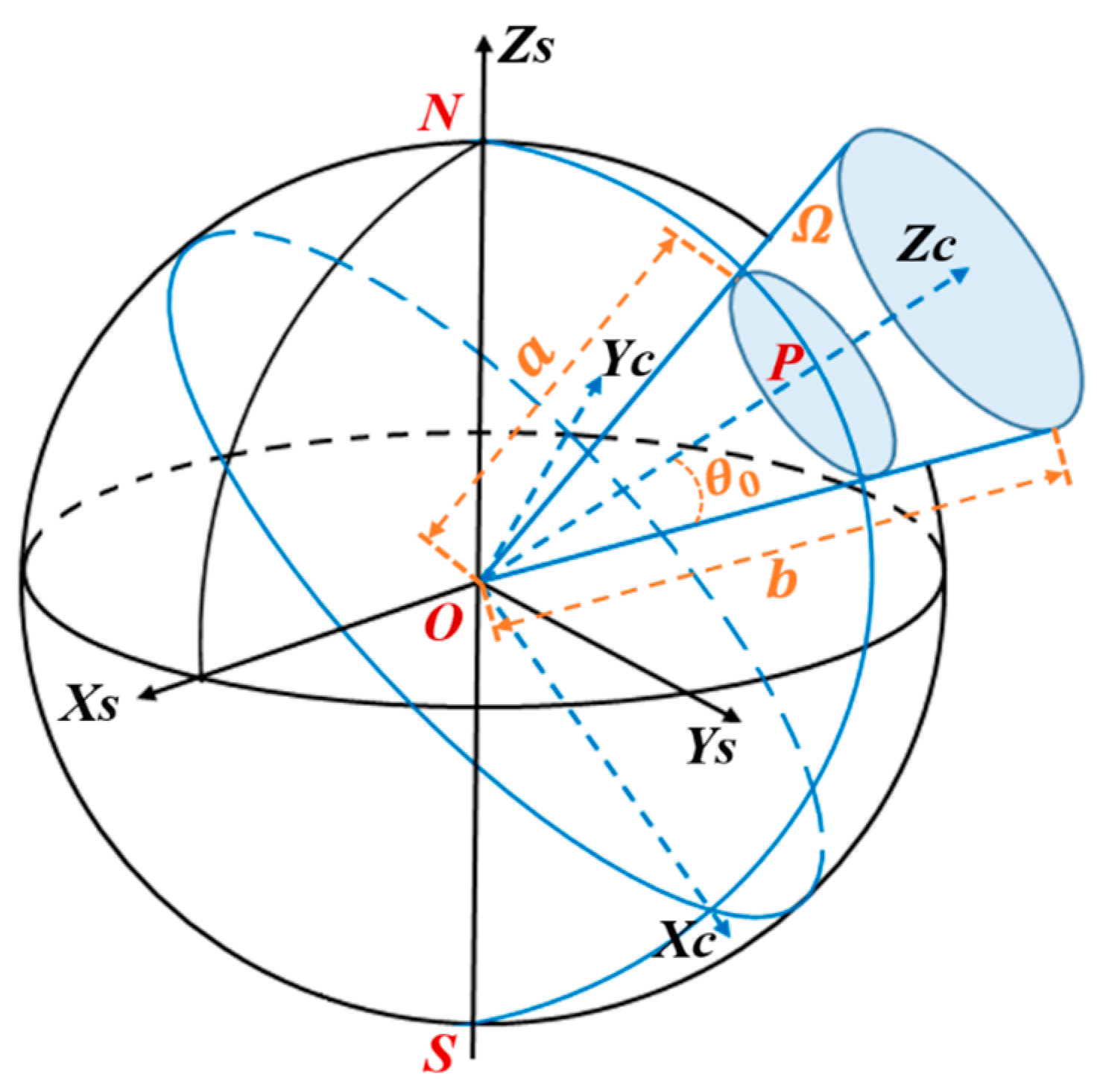
2.3. Coordinate Transformation
2.3.1. Transformation of Geographical Coordinates
2.3.2. Transformation of Geomagnetic Observation Component
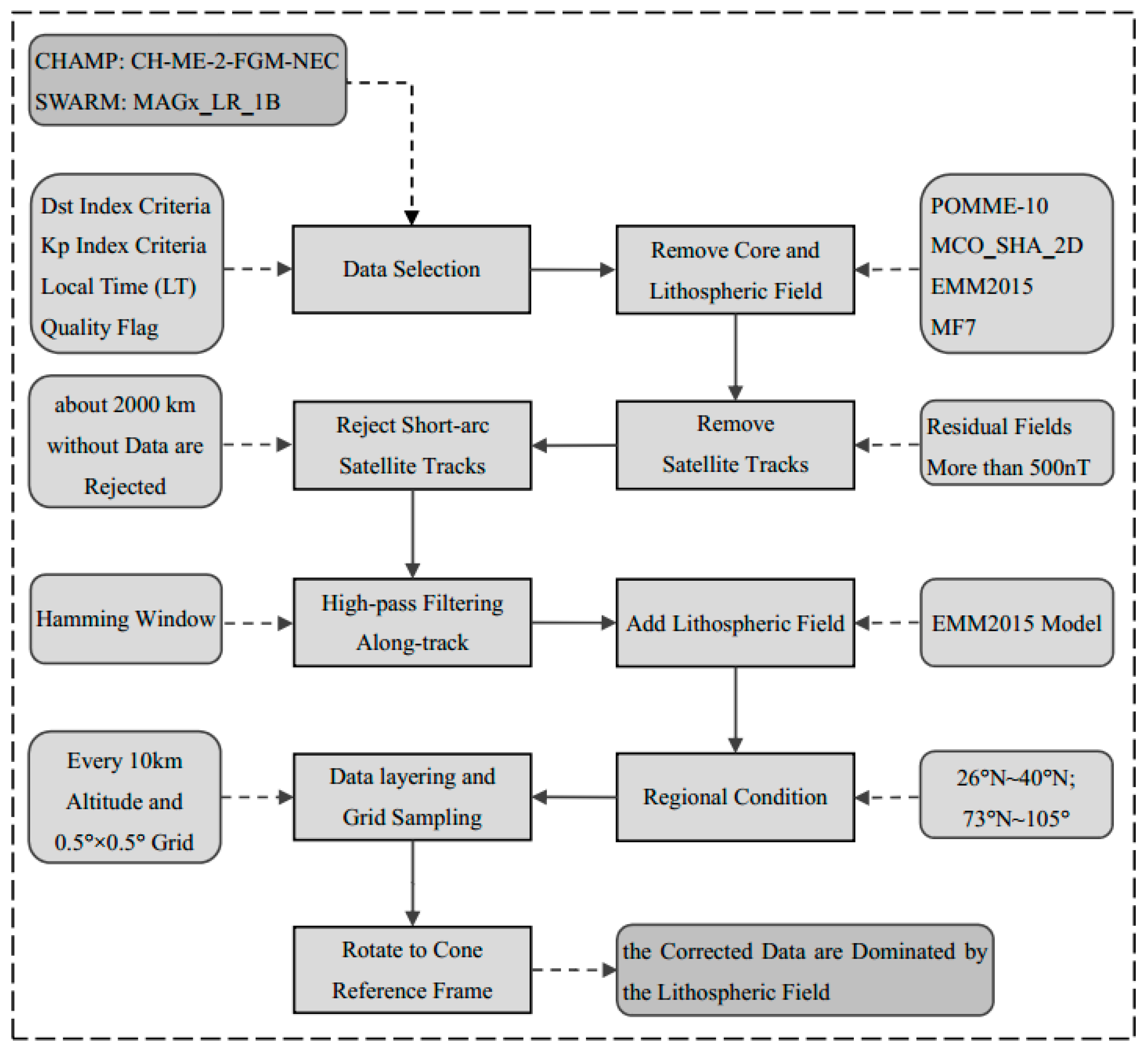
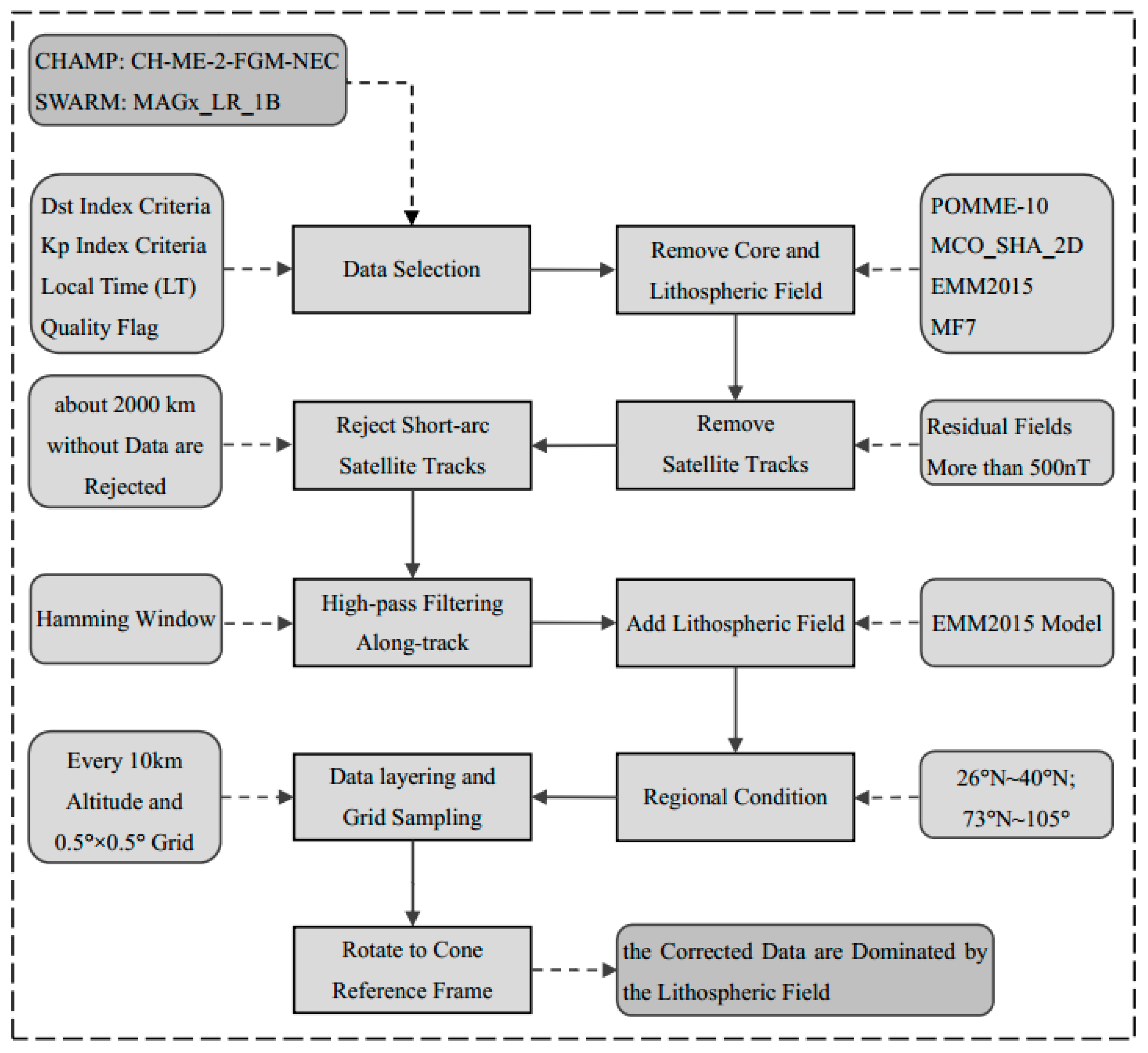
3. Data Source and Data Preprocessing
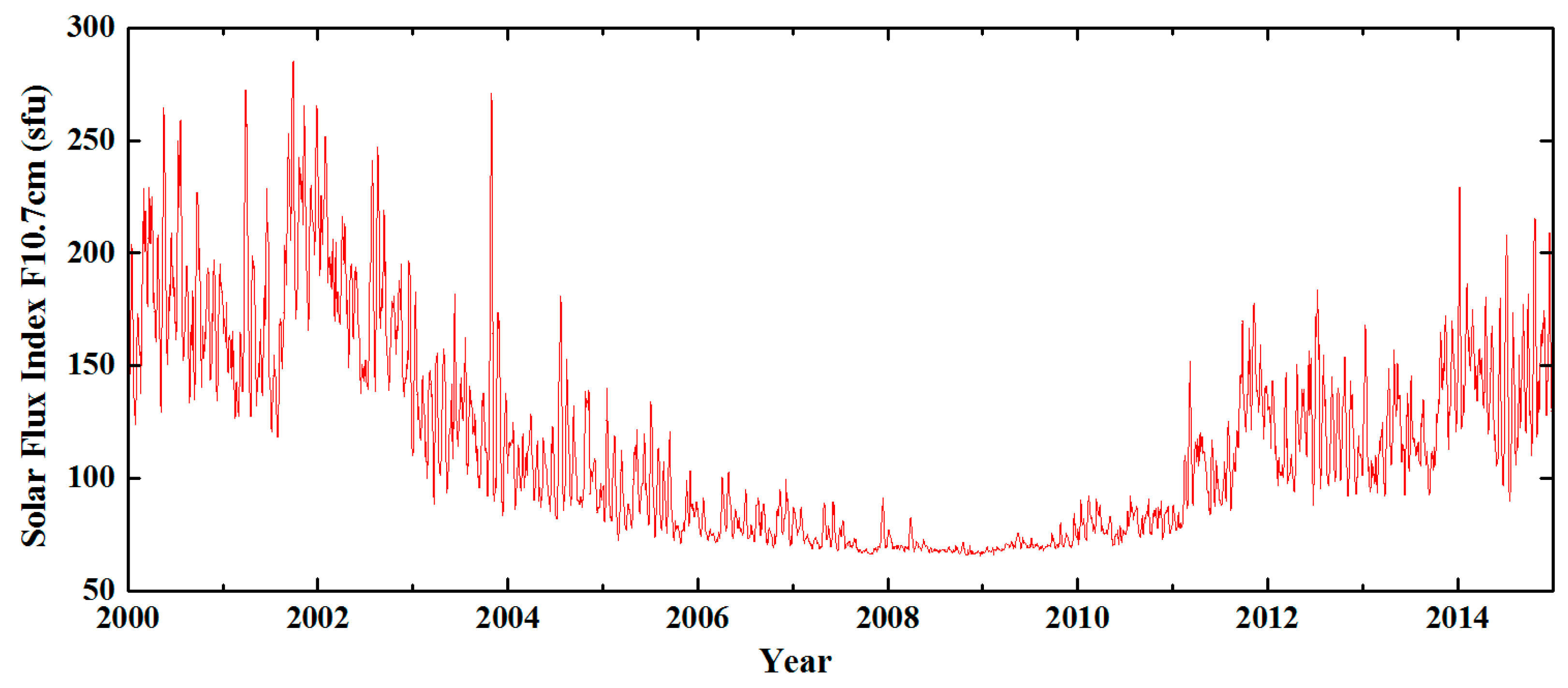
3.1. Data Source
3.2. Data Screening
3.3. Main Magnetic Field and External Magnetic Field Correction
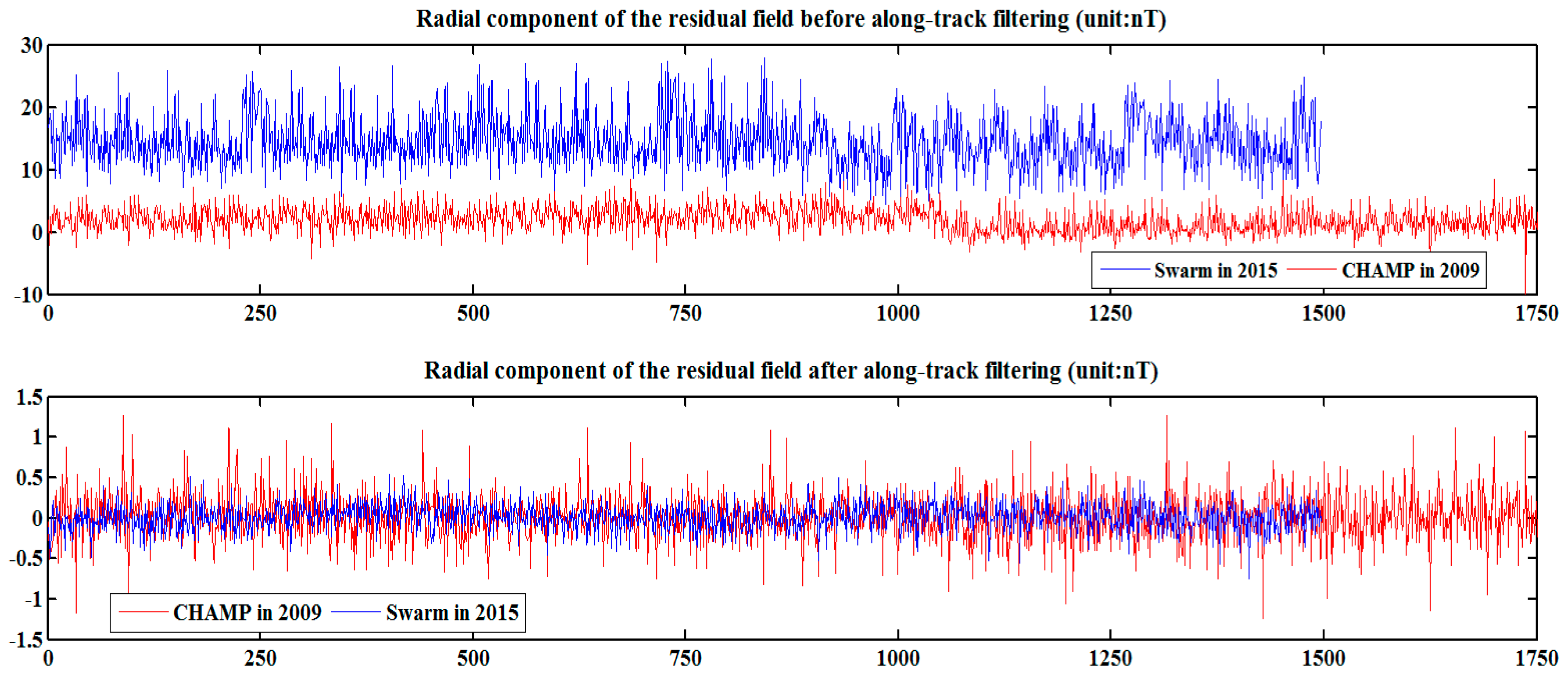
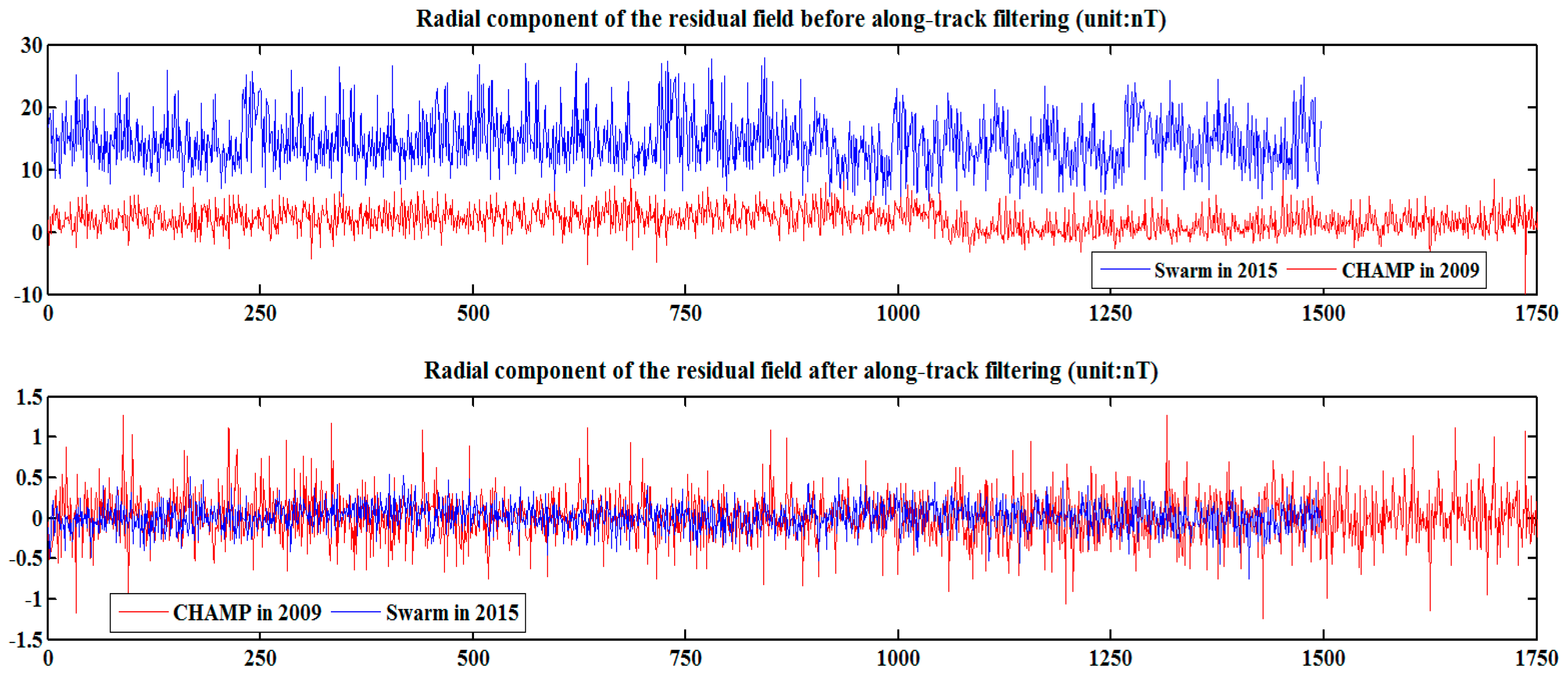
3.4. Along-Track Filtering
3.5. Data Hierarchical Gridding
4. Lithospheric Magnetic Field Model of the Tibetan Plateau
4.1. Related Parameter Setting
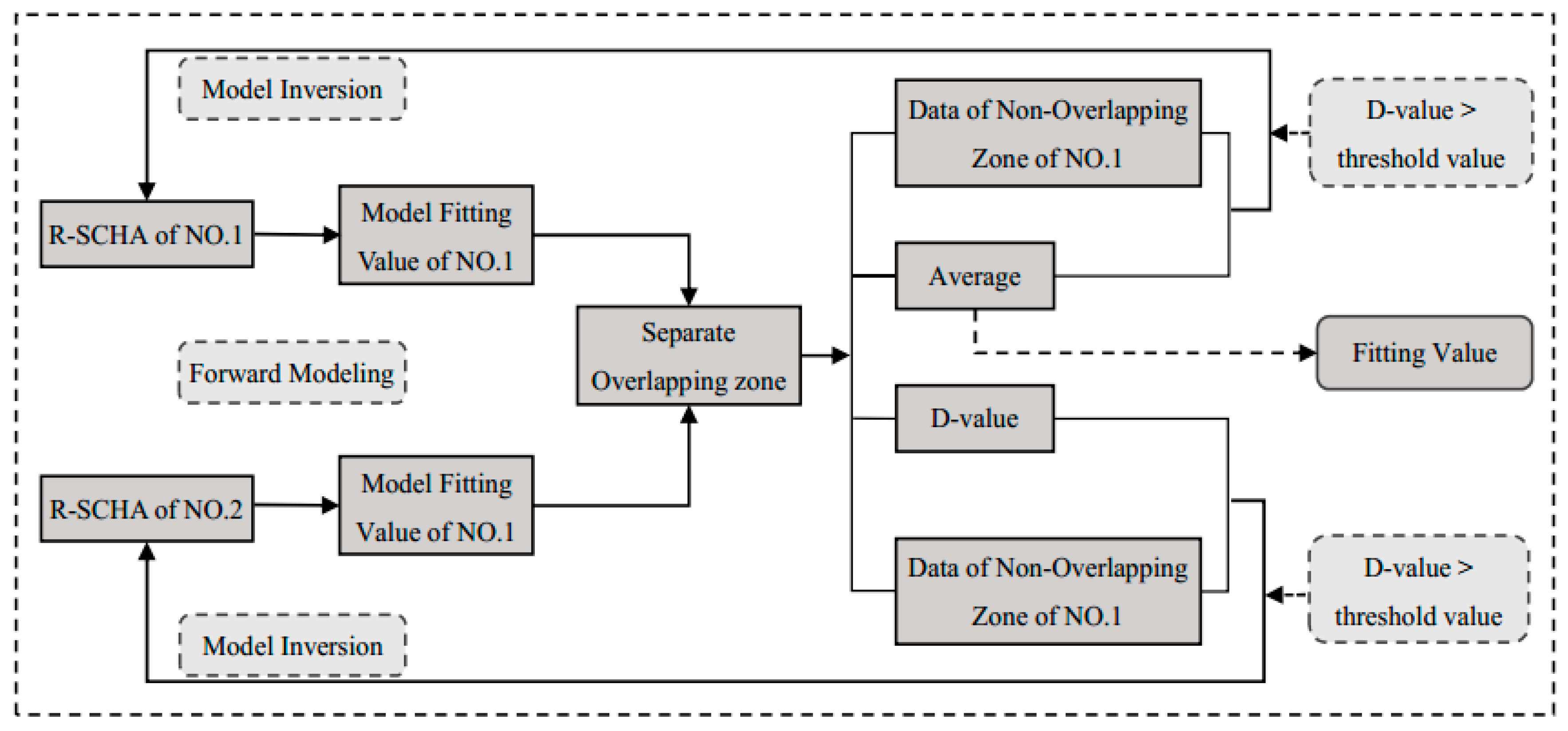
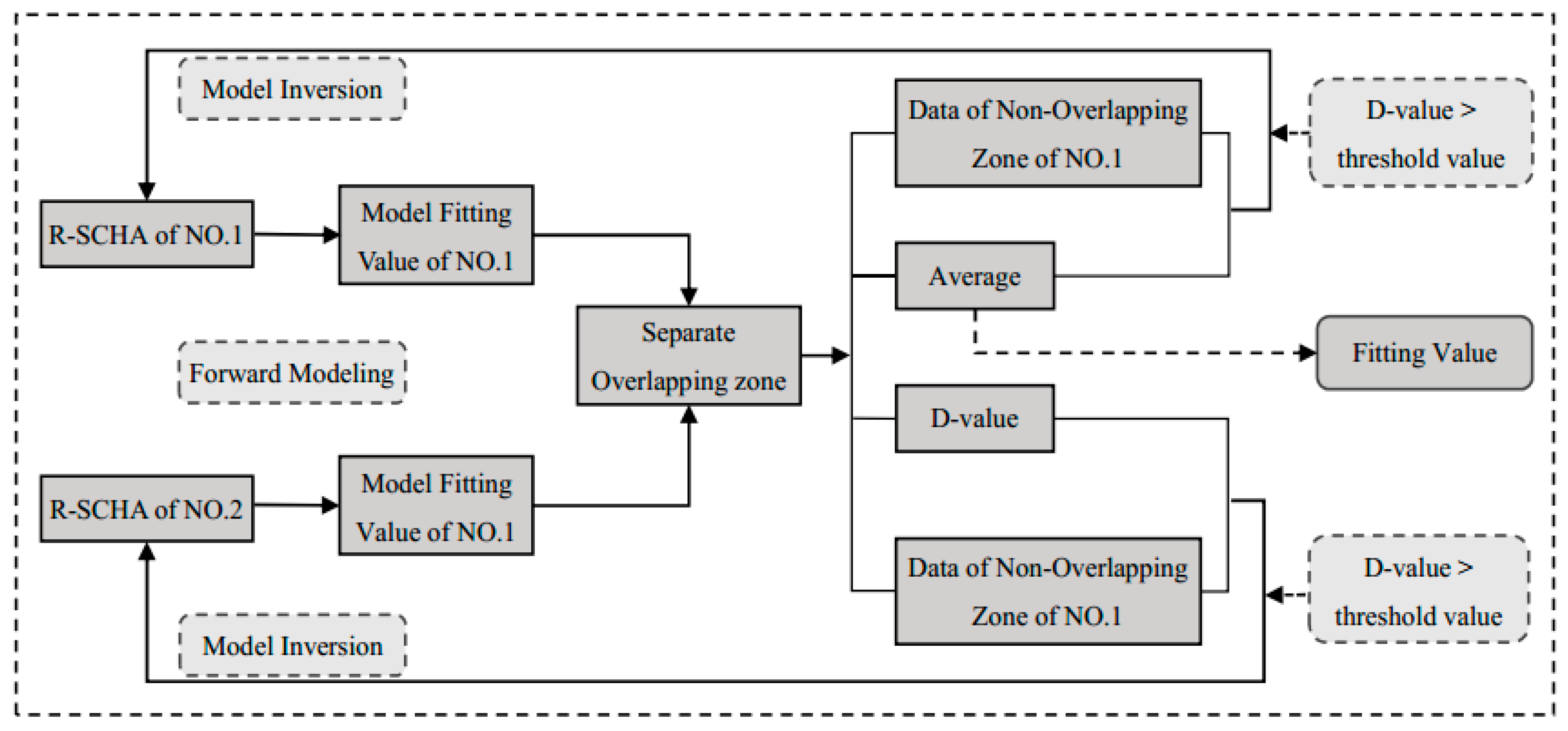
4.2. Spherical Cap Splicing
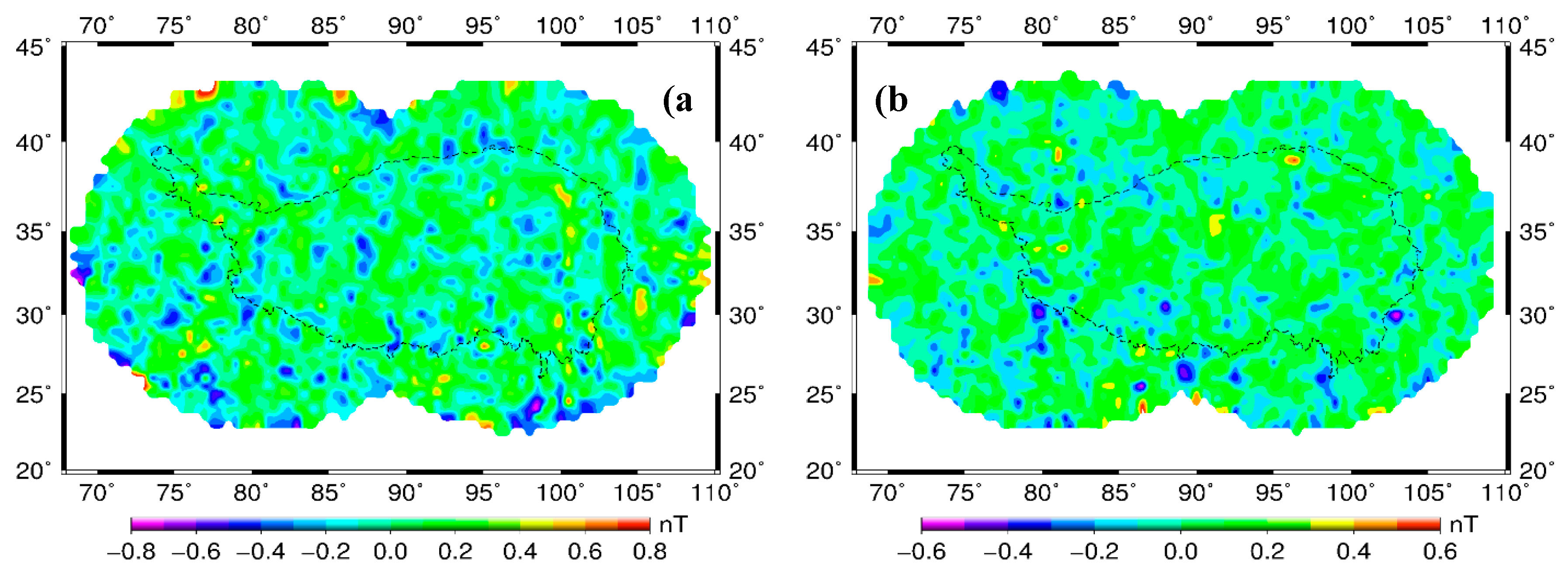
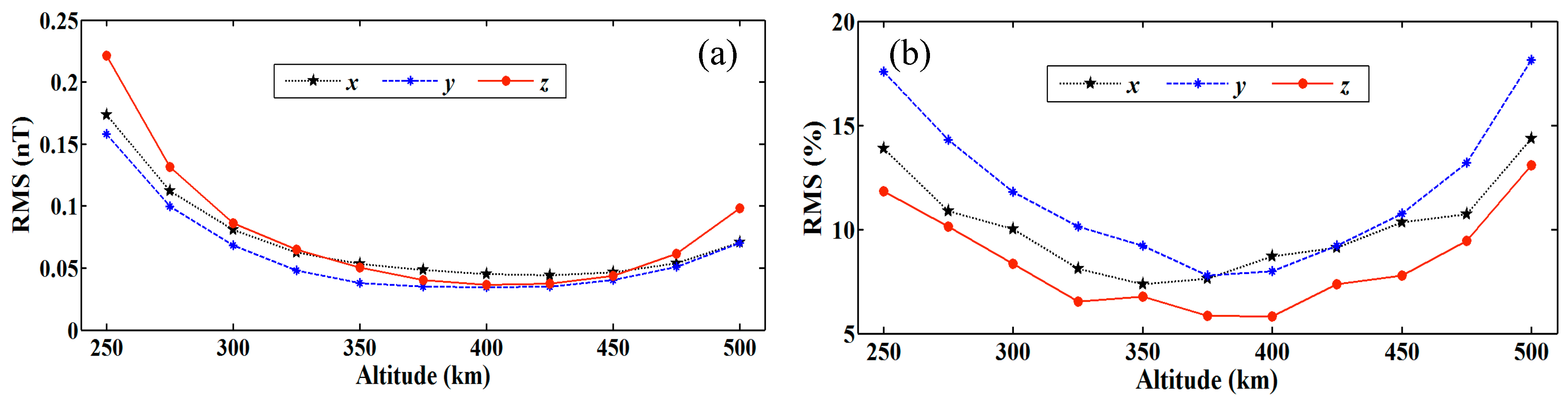
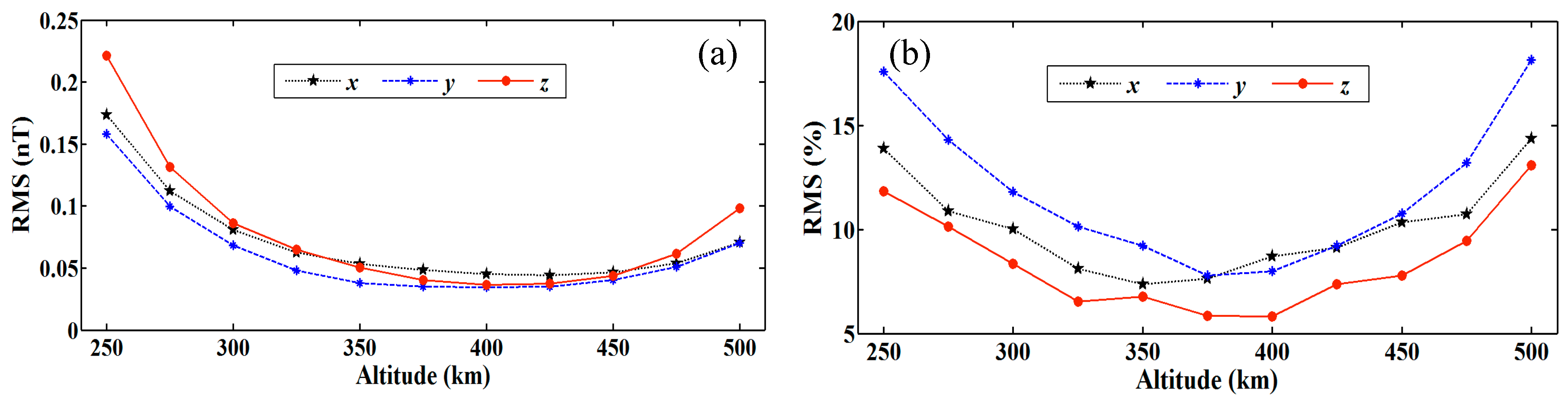
4.3. Error Analysis
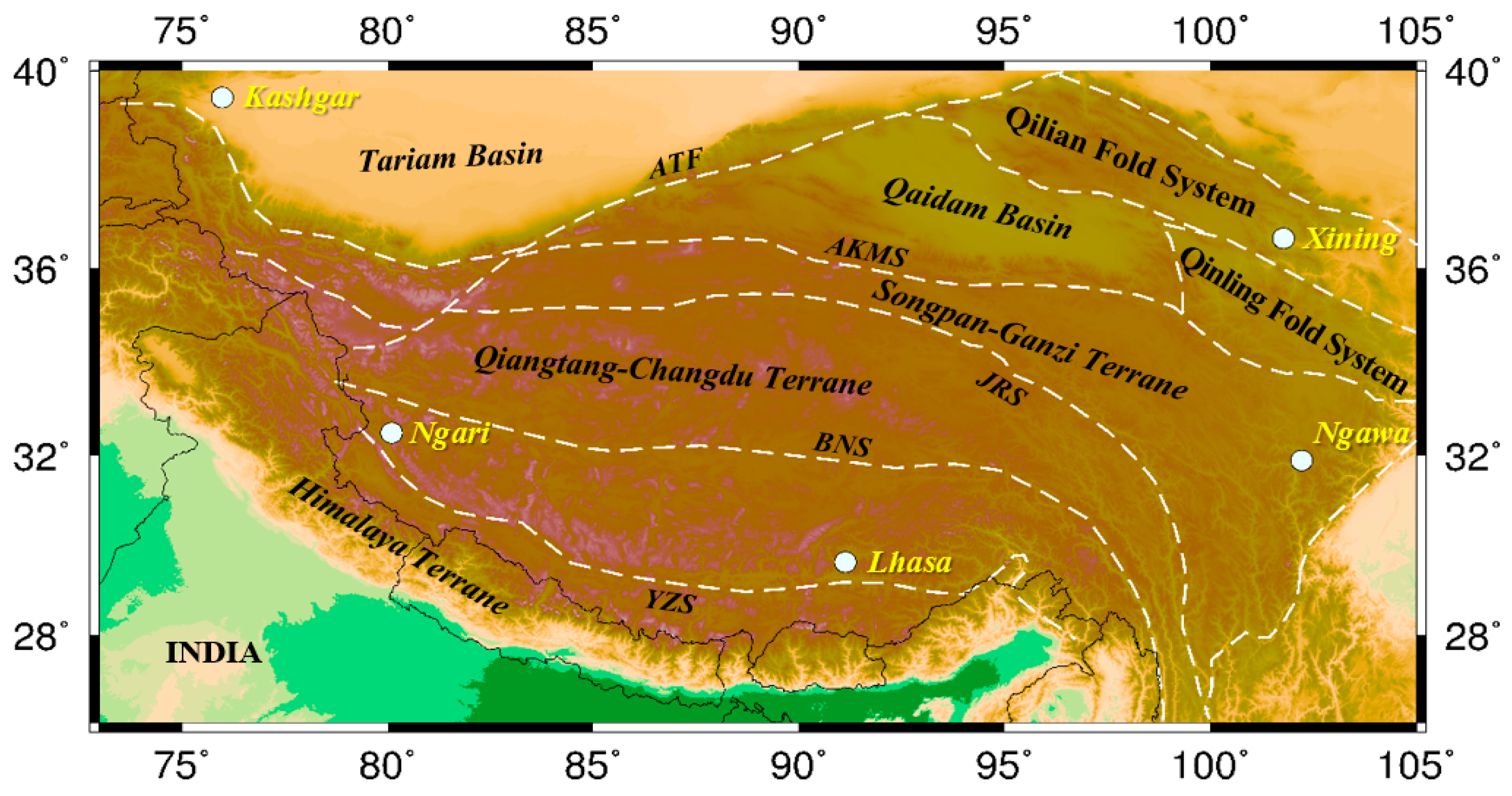
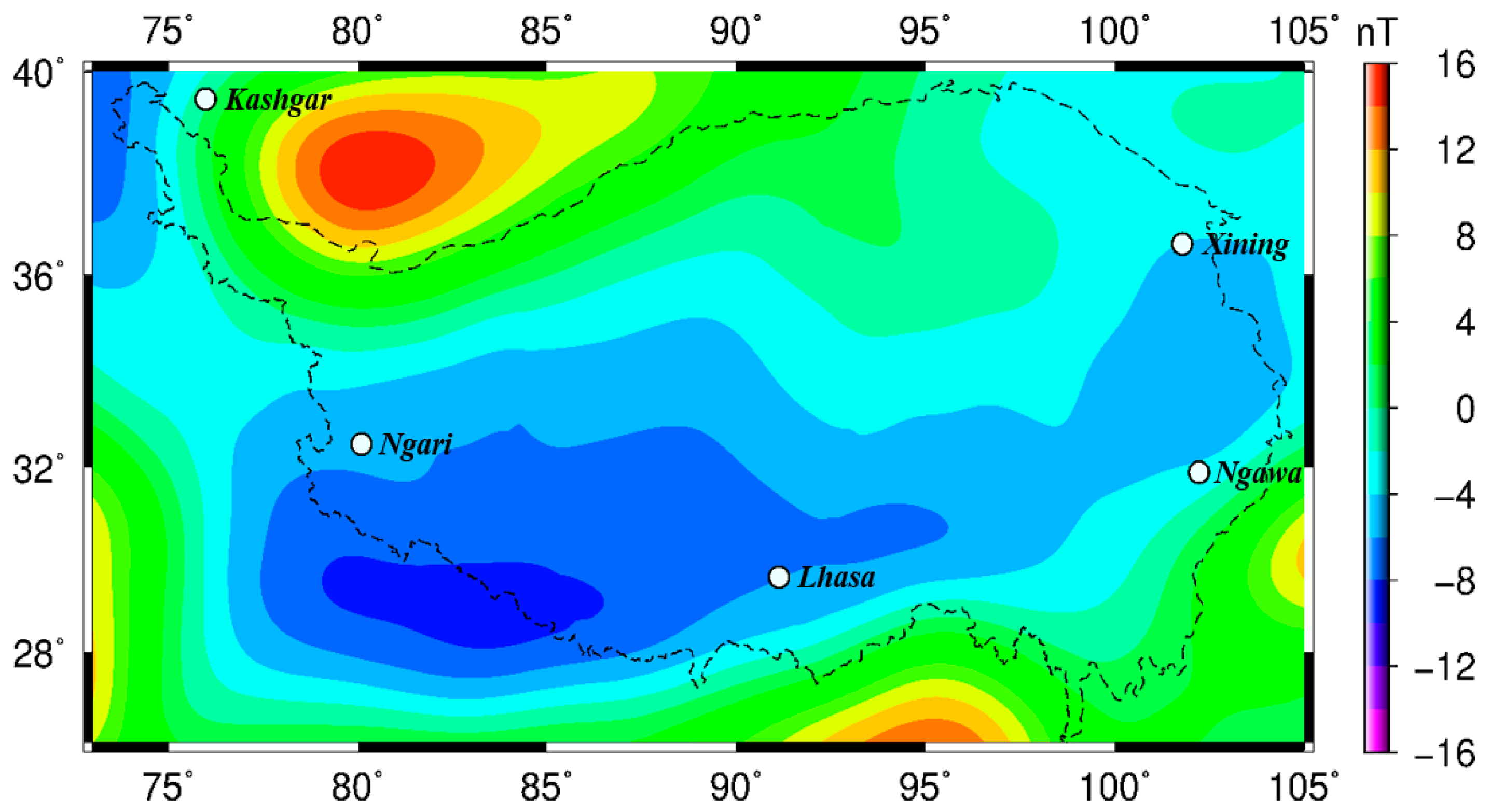
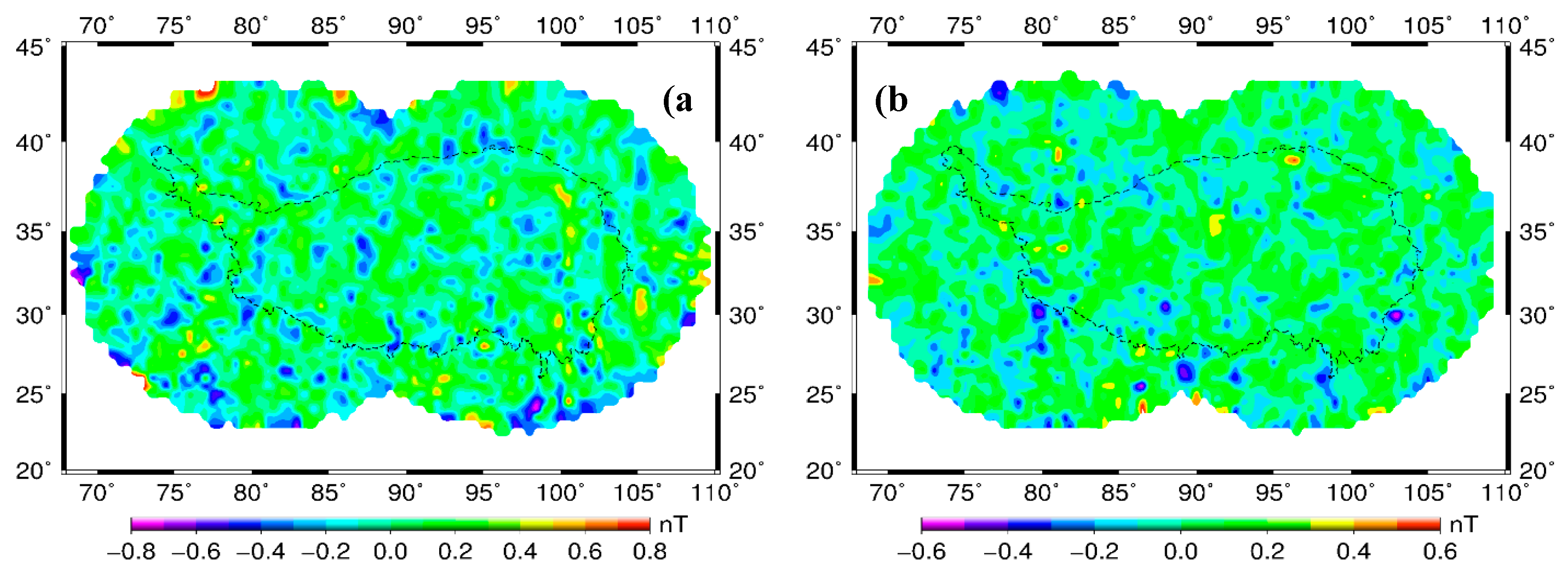
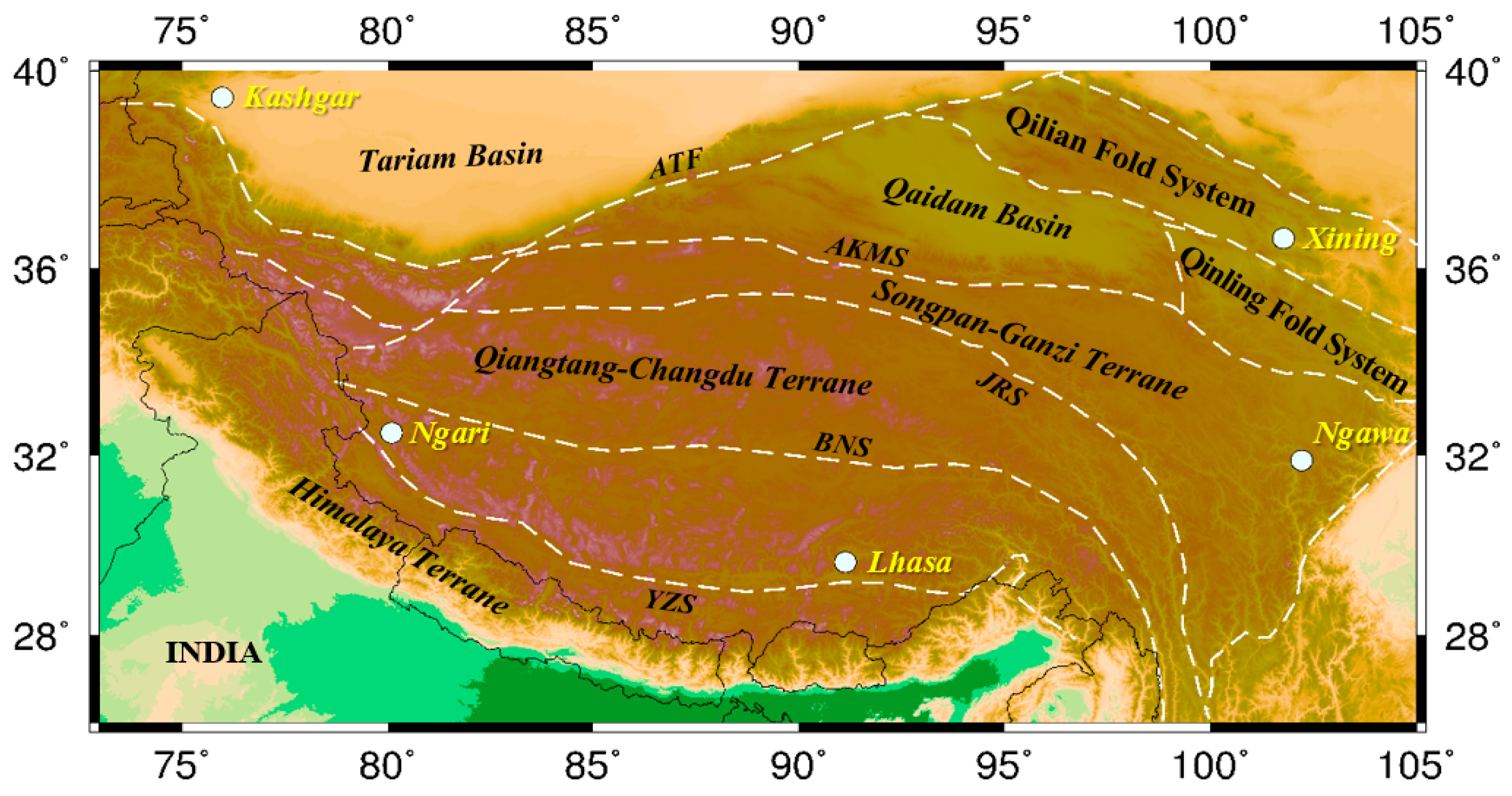
4.4. Geological Structures Analysis of Magnetic Anomalies in the Tibetan Plateau
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, W.Y. Treatise on Geophysics. In Geomagnetism, 1st ed.; Kono, M., Ed.; Seismological Press: Beijing, China, 2003; pp. 18–19. [Google Scholar]
- Du, J.S.; Chen, C. Progress and outlook in global lithosgheric magnetic field modelling by satellite magnetic measurements. Prog. Geophys. 2015, 30, 1017–1033. [Google Scholar] [CrossRef]
- Kang, G.F.; Gao, G.M.; Bai, C.H.; Dan, S.; Feng, L.L. Characteristics of the crustal magnetic anomaly and regional tectonics in the Qinghai-Tibet Plateau and the adjacent areas. Sci. China Earth Sci. 2012, 55, 1028–1036. [Google Scholar] [CrossRef]
- Arkani-Hamed, J.; Zhao, S.K.; Strangway, D.W. Geophysical interpretation of the magnetic anomalies of China derived from Magsat, data. Geophys. J. Int. 1988, 95, 347–359. [Google Scholar] [CrossRef]
- Bai, D.; Unsworth, M.J.; Meju, M.A.; Ma, X.B.; Teng, J.W.; Kong, X.R.; Sun, Y.; Sun, J.; Wang, L.F.; Jiang, C.S.; et al. Crustal deformation of the eastern Tibetan plateau revealed by magnetotelluric imaging. Nat. Geosci. 2010, 3, 358–362. [Google Scholar] [CrossRef]
- Gao, G.; Kang, G.; Bai, C.; Li, G. Distribution of the crustal magnetic anomaly and geological structure in Xinjiang, China. J. Asian Earth Sci. 2013, 77, 12–20. [Google Scholar] [CrossRef]
- Goodge, J.W.; Finn, C.A. Glimpses of East Antarctica: Aeromagnetic and satellite magnetic view from the central Transantarctic Mountains of East Antarctica. J. Geophys. Res. 2010, 115, 633–650. [Google Scholar] [CrossRef]
- Peng, C. Deep Tectonic Framework of China’s Mainland: Serial Explanation of Magnetic Characteristics. Acta Geosci. Sinica 2013, 34, 121–125. [Google Scholar]
- Holschneider, M.; Lesur, V.; Mauerberger, S.; Baerenzung, J. Correlation based modelling and separation of geomagnetic field components. J. Geophys. Res. 2016, 121, 3142–3160. [Google Scholar] [CrossRef]
- Friis-Christensen, E.; Luhr, H.; Hulot, G. Swarm: A constellation to study the Earth’s magnetic field. Earth Planets Space 2006, 58, 351–358. [Google Scholar] [CrossRef]
- Olsen, N.; Friis-Christensen, E.; Floberghagen, R.; Alken, P.; Beggan, C.D.; Chulliat, A.; Doornbos, E.; Encarnação, J.T.; Hamilton, B.; Hulot, G.; et al. The Swarm Satellite Constellation Application and Research Facility (SCARF) and Swarm data products. Earth Planets Space 2013, 65, 1189–1200. [Google Scholar] [CrossRef]
- Maule, C.F.; Purucker, M.E.; Olsen, N.; Mosegaard, K. Heat flux anomalies in Antarctica revealed by satellite magnetic data. Science 2005, 309, 464–467. [Google Scholar] [CrossRef] [PubMed]
- Rajaram, M. Depth to Curie temperature. In Encyclopedia of Geomagnetism and Paleomagnetism, 1st ed.; Gubbins, D., Herrero-Bervera, E., Eds.; Springer: Berlin, Germany, 2007; pp. 157–159. [Google Scholar]
- Rajesh, S.; Majumdar, T.J. Satellite-derived geoid for the estimation of lithospheric cooling and basal heat flux anomalies over the northern Indian Ocean lithosphere. J. Earth Syst. Sci. 2015, 124, 1677–1691. [Google Scholar] [CrossRef]
- Reeves, C.; Korhonen, J.V. Magnetic anomalies for geology and resources. In Encyclopedia of Geomagnetism and Paleomagnetism, 1st ed.; Gubbins, D., Herrero-Bervera, E., Eds.; Springer: Berlin, Germany, 2007; pp. 477–481. [Google Scholar]
- Vervelidou, F.; Thébault, E. Global maps of the magnetic thickness and magnetization of the Earth’s lithosphere. Earth Planets Space 2015, 67, 1–19. [Google Scholar] [CrossRef]
- Bouligand, C.; Glen, J.M.G.; Blakely, R.J. Mapping Curie temperature depth in the western United States with a fractal model for crustal magnetization. J. Geophys. Res. 2009, 114, 337–343. [Google Scholar] [CrossRef]
- Ou, J.M.; Du, A.M.; Thébault, E.; Xu, W.Y.; Tian, X.B.; Zhang, T.L. A high resolution lithospheric magnetic field model over China. Sci. China Earth Sci. 2013, 56, 1759–1768. [Google Scholar] [CrossRef]
- Kim, H.R.; Frese, R.R.B.V.; Golynsky, A.V.; Taylor, P.T.; Kim, J.W. Application of satellite magnetic observations for estimating near-surface magnetic anomalies. Earth Planets Space 2004, 56, 955–966. [Google Scholar] [CrossRef]
- Thébault, E.; Vigneron, P.; Maus, S.; Chulliat, A.; Sirol, O.; Hulot, G. Swarm SCARF Dedicated lithospheric field inversion chain. Earth Planets Space 2013, 65, 1257–1270. [Google Scholar] [CrossRef]
- Olsen, N.; Sabaka, T.J.; Gaya-Pique, L.R. Study of an Improved Comprehensive Magnetic Field Inversion Analysis for Swarm; DNSC Scientific Report; Danish National Space Center: Copenhagen, Danmark, 2007. [Google Scholar]
- Sabaka, T.J.; Tøffner-Clausen, L.; Olsen, N. Use of the Comprehensive Inversion method for Swarm satellite data analysis. Earth Planets Space 2013, 65, 1201–1222. [Google Scholar] [CrossRef]
- Sabaka, T.J.; Olsen, N.; Tyler, R.H.; Kuvshinov, A. CM5, a pre-Swarm comprehensive geomagnetic field model derived from over 12yr of CHAMP, Ørsted, SAC-C and observatory data. Geophys. J. Int. 2015, 200, 1596–1626. [Google Scholar] [CrossRef]
- Maus, S.; Yin, F.; Lühr, H.; Manoj, C.; Rother, M.; Rauberg, J.; Michaelis, I.; Stolle, C.; Müller, R.D. Resolution of direction of oceanic magnetic lineations by the sixth-generation lithospheric magnetic field model from CHAMP satellite magnetic measurements. Geochem. Geophys. Geosyst. 2008, 9, 1335–1346. [Google Scholar] [CrossRef]
- Kother, L.; Hammer, M.D.; Finlay, C.C.; Olsen, N. An equivalent source method for modelling the global lithospheric magnetic field. Geophys. J. Int. 2015, 203, 553–566. [Google Scholar] [CrossRef]
- Alldredge, L.R. Rectangular harmonic analysis applied to the geomagnetic field. J. Geophys. Res. 1981, 86, 3021–3026. [Google Scholar] [CrossRef]
- Li, M.M.; Huang, X.L.; Lu, H.Q.; Hang, Y. Modeling of high accuracy local geomagnetic field base on rectangular harmonic analysis. J. Astronaut. 2010, 31, 1730–1736. [Google Scholar]
- Haines, G.V. Spherical cap harmonic analysis of geomagnetic secular variation over Canada 1960–1983. J. Geophys. Res. 1985, 901, 12563–12574. [Google Scholar] [CrossRef]
- Stening, R.J.; Reztsova, T.; Ivers, D.; Turner, J.; Winch, D.E. Spherical cap harmonic analysis of magnetic variations data from mainland Australia. Earth Planets Space 2008, 60, 1177–1186. [Google Scholar] [CrossRef]
- Thébault, E.; Schott, J.J.; Mea, M. Revised spherical cap harmonic analysis (R-SCHA): Validation and properties. J. Geophys. Res. 2006, 111, 279–288. [Google Scholar] [CrossRef]
- Thébault, E.; Mandea, M.; Schott, J.J. Modeling the lithospheric magnetic field over France by means of revised spherical cap harmonic analysis (R-SCHA). J. Geophys. Res. 2006, 111, 303–306. [Google Scholar] [CrossRef]
- Feng, Y.; Jiang, Y.; Jiang, Y.; Li, Z.; Jiang, J.; Liu, Z.W.; Ye, M.C.; Wang, H.S.; Li, X.M. Regional magnetic anomaly fields: 3d taylor polynomial and surface spline models. J. Appl. Geophys. 2016, 13, 59–68. [Google Scholar] [CrossRef]
- Ou, J.M.; Du, A.M.; Xu, W.Y.; Hong, M.H.; Chen, G.X.; Luo, H.; Zhao, X.D.; Bai, C.H.; Wang, Y. The Legendre polynomials modeling method of small-scale geomagnetic fields. Chin. J. Geophys. Chin. Ed. 2012, 55, 2669–2675. [Google Scholar]
- Zhang, S.Q.; Fu, C.H.; Zhao, X.D. Study of regional geomagnetic model of Fujian and adjacent areas based on 3D Taylor Polynomial model. Chin. J. Geophys. 2016, 59, 1948–1956. [Google Scholar]
- Thébault, E.; Schott, J.J.; Mandea, M.; Hoffbeck, J.P. A new proposal for spherical cap harmonic modelling. Geophys. J. Int. 2004, 159, 83–103. [Google Scholar] [CrossRef]
- Hesse, K.; Sloan, I.H.; Womersley, R.S. Numerical integration on the sphere. In Handbook of Geomathematics, 1st ed.; Freeden, W., Nashed, M.Z., Sonar, T., Eds.; Springer: Berlin, Germany, 2010; pp. 1185–1219. [Google Scholar]
- Torta, J.M.; García, A.; Curto, J.J.; Santis, A.D. New representation of geomagnetic secular variation over restricted regions by means of spherical cap harmonic analysis: Application to the case of Spain. Phys. Earth Planet. Int. 1992, 74, 209–217. [Google Scholar] [CrossRef]
- Liu, D.C. Matrix Analysis, 1st ed.; Wuhan University Press: Wuhan, China, 2004. [Google Scholar]
- Korte, M.; Holme, R. Regularization of spherical cap harmonics. Geophys. J. Int. 2003, 153, 253–262. [Google Scholar] [CrossRef]
- OuYang, Y.Z. On Key Technologies of Data Processing for Air-sea Gravity Surveys. Acta Geod. Cartogr. Sin. 2014, 43, 435. [Google Scholar]
- Wang, Z.J. Research on the Regularization Solutions of Ill-Posed Problems in Geodesy. Ph.D. Thesis, The Chinese Academy of Sciences Measurement and Geophysical Institute, Wuhan, China, June 2003. [Google Scholar]
- Zhong, B. Study on the Determination of the Earth’s Gravity Field from Satellite Gravimetry Mission GOCE. Ph.D. Thesis, Wuhan University, Wuhan, China, June 2010. [Google Scholar]
- Xiong, X.T.; Liu, X.H.; Yan, Y.M.; Guo, H.B. A numerical method for identifying heat transfer coefficient. Appl. Math. Model. 2010, 34, 1930–1938. [Google Scholar] [CrossRef]
- Thébault, E.; Gaya-Piqué, L. Applied comparisons between SCHA and R-SCHA regional modeling techniques. Geochem. Geophys. Geosyst. 2008, 9, 3562–3585. [Google Scholar] [CrossRef]
- Santis, A.D.; Torta, J.M.; Falcone, C. A simple approach to the transformation of spherical harmonic models under coordinate system rotation. Geophys. J. Int. 1996, 126, 263–270. [Google Scholar] [CrossRef]
- Sabaka, T.J.; Olsen, N.; Purucker, M.E. Extending comprehensive models of the Earth’s magnetic field with Ørsted and CHAMP data. Geophys. J. Int. 2004, 159, 521–547. [Google Scholar] [CrossRef]
- Beggan, C.D.; Macmillan, S.; Hamilton, B.; Thomson, A.W.P. Independent validation of swarm level 2 magnetic field products and ‘quick look’ for level 1b data. Earth Planets Space 2013, 65, 1345–1353. [Google Scholar] [CrossRef]
- Hamilton, B. Rapid modelling of the large-scale magnetospheric field from Swarm satellite data. Earth Planets Space 2013, 65, 1295–1308. [Google Scholar] [CrossRef]
- Thébault, E.; Vervelidou, F.; Lesur, V.; Hamoudi, M. The satellite along-track analysis in planetary magnetism. Geophys. J. Int. 2012, 188, 891–907. [Google Scholar] [CrossRef]
- Langel, R.A. The use of low altitude satellite data bases for modeling of core and crustal fields and the separation of external and internal fields. Surv. Geophys. 1993, 14, 31–87. [Google Scholar] [CrossRef]
- Zhao, J.H.; Wang, S.P.; Liu, H.; Li, D.-F. Study on establishing local geomagnetic model using spherical cap harmonic analysis. Sci. Surv. Map. 2010, 35, 50–52. [Google Scholar]
- Li, H.; Li, S.; Song, X.D.; Gong, M.; Li, X.; Jia, J. Crustal and uppermost mantle velocity structure beneath northwestern china from seismic ambient noise tomography. Geophys. J. Int. 2012, 188, 131–143. [Google Scholar] [CrossRef]
- Tong, Y.B.; Yang, Z.; Gao, L.; Wang, H.; Zhang, X.D.; An, C.Z. Paleomagnetism of upper cretaceous red-beds from the eastern qiangtang block: Clockwise rotations and latitudinal translation during the India-Asia collision. J. Asian Earth Sci. 2015, 114, 732–749. [Google Scholar] [CrossRef]
- Tao, W.; Shen, Z. Heat flow distribution in Chinese continent and its adjacent areas. Prog. Nat. Sci. 2008, 18, 843–849. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Boundary | Pole of the Cone | Half Aperture of the Cone | Truncation Degree | ||||
|---|---|---|---|---|---|---|---|---|
| Lower | Upper | Latitude | Longitude | |||||
| No. 1 | 33° | 81° | 10° | 15 | 5 | 10 | ||
| No. 2 | 33° | 97° | 10° | 15 | 5 | 10 | ||
| Satellite Altitude | Item | |||
|---|---|---|---|---|
| CHAMP (250~340km) | Min | –1.070 | –1.419 | –0.829 |
| Max | 0.918 | 1.177 | 0.803 | |
| RMS | 0.235 | 0.285 | 0.196 | |
| Swarm (450~510km) | Min | –1.051 | –0.882 | –0.406 |
| Max | 0.627 | 0.961 | 0.583 | |
| RMS | 0.156 | 0.185 | 0.120 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Y.; Wang, Z.; Jiang, W.; Zhang, B.; Li, F.; Guo, F. Combining CHAMP and Swarm Satellite Data to Invert the Lithospheric Magnetic Field in the Tibetan Plateau. Sensors 2017, 17, 238. https://doi.org/10.3390/s17020238
Qiu Y, Wang Z, Jiang W, Zhang B, Li F, Guo F. Combining CHAMP and Swarm Satellite Data to Invert the Lithospheric Magnetic Field in the Tibetan Plateau. Sensors. 2017; 17(2):238. https://doi.org/10.3390/s17020238
Chicago/Turabian StyleQiu, Yaodong, Zhengtao Wang, Weiping Jiang, Bingbing Zhang, Fupeng Li, and Fei Guo. 2017. "Combining CHAMP and Swarm Satellite Data to Invert the Lithospheric Magnetic Field in the Tibetan Plateau" Sensors 17, no. 2: 238. https://doi.org/10.3390/s17020238
APA StyleQiu, Y., Wang, Z., Jiang, W., Zhang, B., Li, F., & Guo, F. (2017). Combining CHAMP and Swarm Satellite Data to Invert the Lithospheric Magnetic Field in the Tibetan Plateau. Sensors, 17(2), 238. https://doi.org/10.3390/s17020238