1. Introduction
Aircraft engine health monitoring (EHM) plays an important role in many of the nation’s key industries, including aerospace, manufacturing, and energy. Central to EHM, lubrication monitoring is essential to provide an early warning in failure progression and also extends the quantity of lubrication oil, in order to ensure engine reliability and security and reduces maintenance costs and environmental pollution.
Flowing lubrication oil can not only cool the working parts and protect metal surfaces against corrosion, but it also transports the debris/particles produced by mechanical wear, which can reflect the healthy status of the engine and its components. The wear particles in lubrication oil maintain a constant concentration and small size in normal working conditions; however, when abnormal wear occurs, the concentration and size of the particles increase and may result in overheating and component failure [
1]. Therefore, the detection of lubrication oil debris is an essential and effective means for identifying an engine’s wear condition and providing a prognosis in pending failure. Generally, the types of debris can be divided into ferrous and nonferrous. It has been shown that the size and forms of debris produced in different wear states are different, as illustrated in
Table 1.
Many studies from academia and industry have been made in the past decade, to detect the conditions of lubrication oil. Laboratory (offline) and in situ (online) methods are both used in metal particle analysis. The offline approaches require a physical sample of the lubrication oil collected from the lubrication oil circulation system. Therefore, a diagnostic database and a long period are needed. Currently, these offline measurement methods include ferrography [
2] and spectrometric analysis [
3]. In comparison, online methods normally utilize sensors installed on the engine to continuously monitor circulating lubrication oil during operation. Online methods can perform real time analysis with no request for complicated setup and long-time analysis in a laboratory. In situ monitoring of lubricant oil quality has become an important issue in today’s military, transportation and manufacturing industries [
4].
Over the years, scientists and experts have developed a wide range of online lubrication oil condition methodologies that can provide continuous monitoring of an engine’s health condition. These methods include optical detection [
5], photoelectric and magnetic hybrid detection [
6], inductive detection [
7,
8], capacitance detection [
9,
10,
11], ultrasonic/acoustic detection [
12], electrical impedance detection [
13], online x-ray spectrography [
14], high temperature dynamic viscosity sensor [
15] and electrostatic charge detection [
16]. The advantages and disadvantages of all these online condition monitoring technologies have been listed in the literature [
17]. Wu et al. [
18] (2013) comprehensively reviewed the progress of on-line lubrication oil monitoring techniques, mainly focusing on sensor technologies, their scopes and industrial applications. The final goal of all of the above-mentioned technologies is to achieve lubrication of the oil health condition in a complex engine and solve some challenges, such as environmental compensation, compatibility with structures and electromagnetic property, high reliability and robustness, high resolution and accuracy for weak and random signals.
To remedy the limitation of a single method, many researchers have proposed some integrated approaches to play their own advantages. For example, Appleby et al. [
10] (2013) combined ultrasonic, capacitance and inductance-based methods to detect lubrication oil debris contents and analyze other physical parameters associated with lubricating oil degradation. Matsumoto et al. [
2] (2016) presented a hybrid approach combining scanning electron microscopy (SEM) and ferrography to observe the wear debris particles in lubricant oil during a stable wear state and an abnormal wear state. Xu et al. [
12] (2015) adopted matching pursuit and quantum-behaved particle swarm optimization to extract the ultrasonic echo wave shape features that can distinguish debris with different shapes and air bubbles. Some useful apparatuses have been developed with microfluidic techniques to detect the individual particles based on different principles [
19]. These devices include the resistive pulse sensor, capacitance counter sensor and inductive counter sensors [
20].
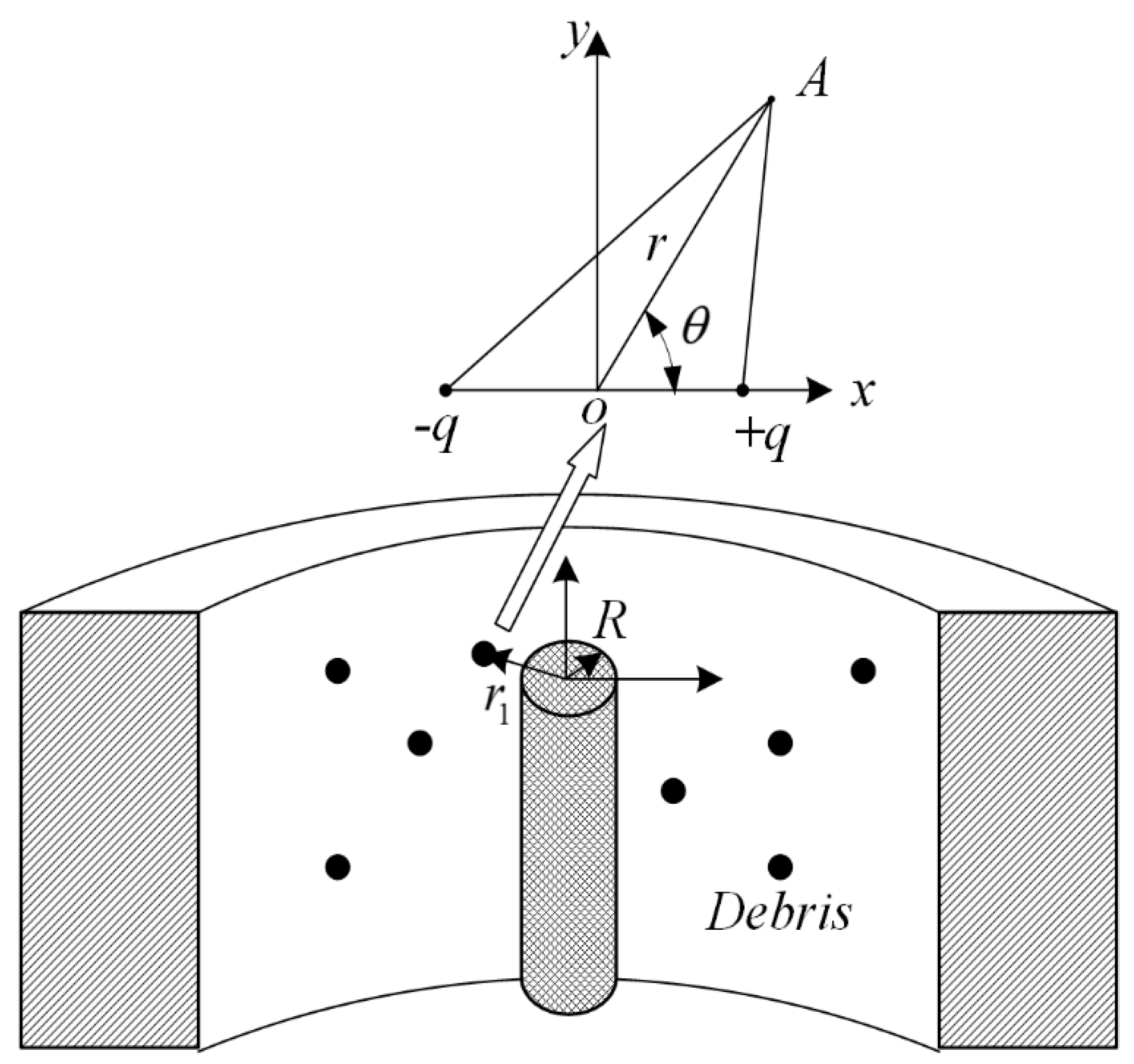
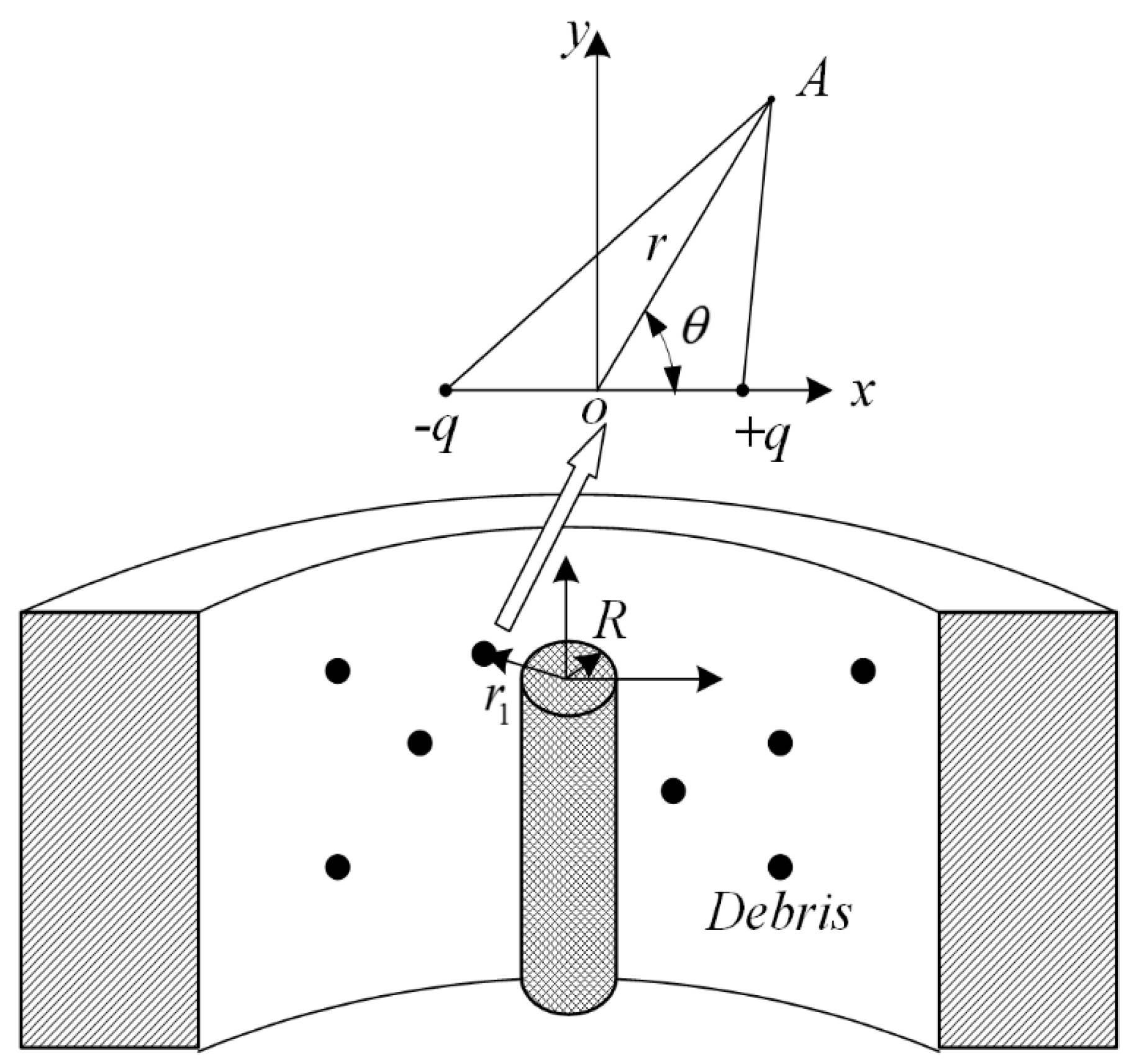
Among all these means, capacitive sensors have been widely used because of the advantages of good temperature stability, simple structure, strong adaptability, good dynamic response, and noncontact measurement [
21]. Although the capacitance methods have some problems, such as sensitive to lubrication oil quality, such as total acid number, water content and viscosity, they are still the most practical and effective methods in many applications [
22,
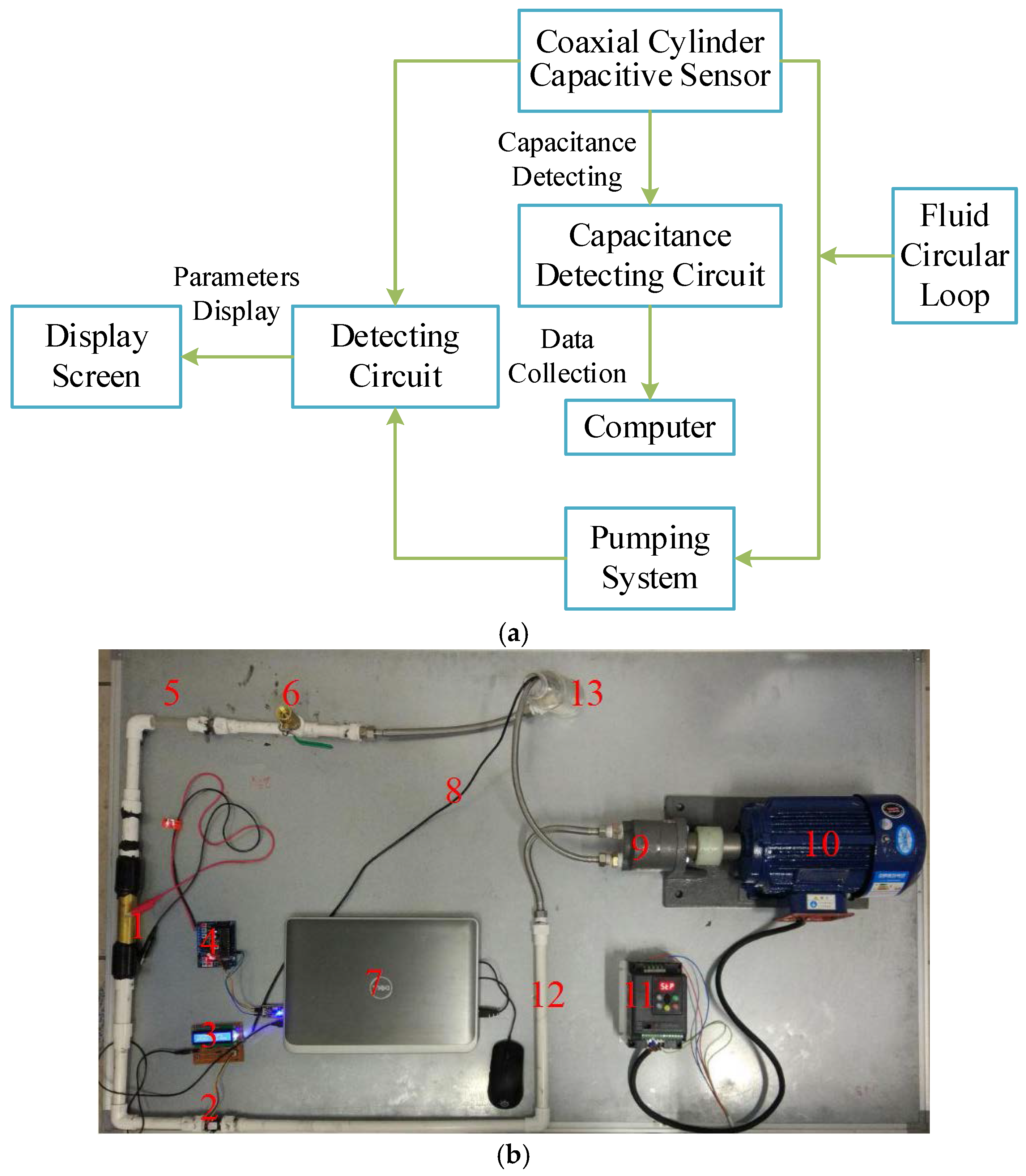
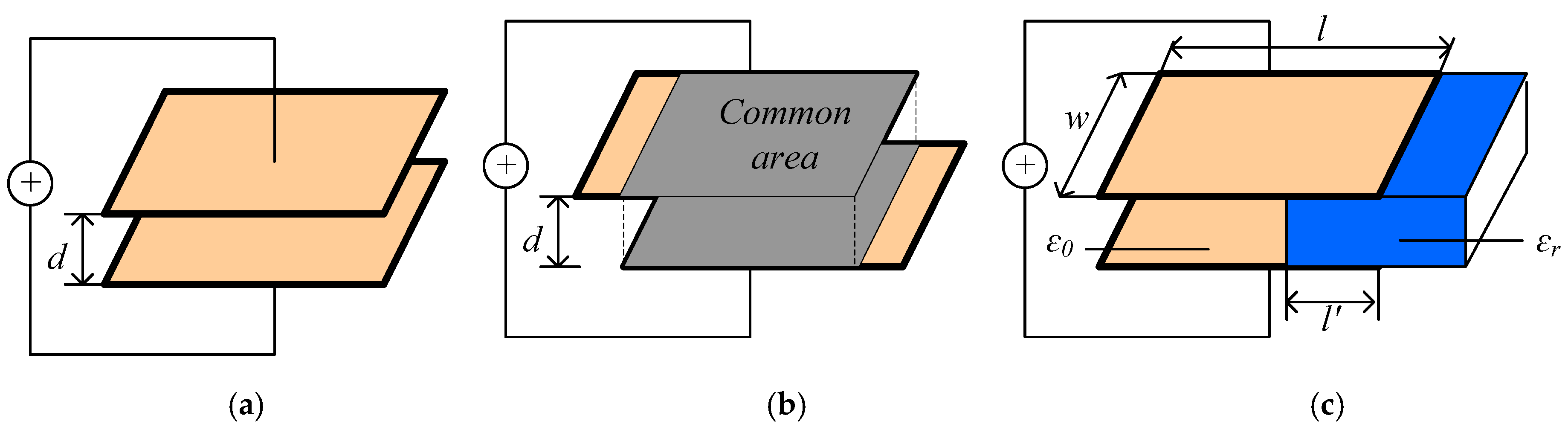
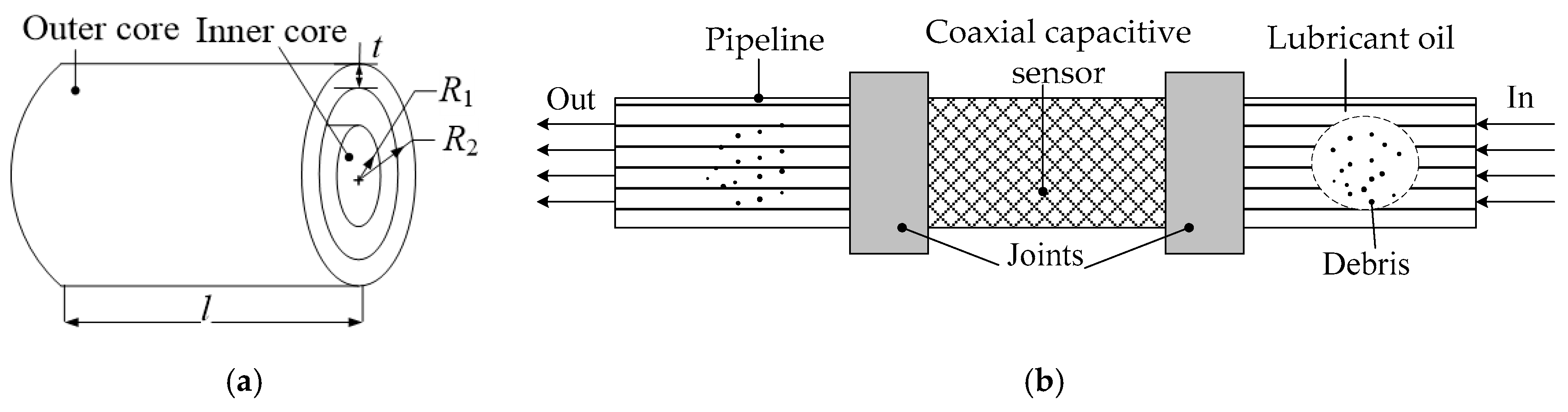
23]. However, further studies on the characteristics of capacitive sensors are required to improve their technology maturity. Therefore, in this article, we not only study the design of an in-situ capacitive sensor for monitoring debris of engine lubrication oil, but also explore the characteristics of capacitive sensors. The basic principle of designing is to utilize the influence of dielectric permittivity. Namely, when the debris gets into the lubrication oil and causes a change in the dielectric constant of lubrication oil, the capacitance will vary as well. Hence, we can use the capacitance change to characterize whether the lubrication oil contains debris or not. The novelty of the presented capacitance sensor can be summarized by two aspects. One is that the sensor structure is simple and characterized by two coaxial cylinders as electrodes, while conventional capacitive sensors are composed of two parallel plates as electrodes. This structure feature is beneficial as it allows easy integration with the lubrication oil pipeline. The other is that the sensing mechanism and physical model of the presented sensor is verified and validated by a simple proof-of-principle experimental system.
The aim of this work was to conduct a feasibility study on the application of the capacitive sensing principle for detecting debris in lubricant oil. The paper is organized as follows: Firstly, the theoretical model of the capacitive sensor is developed to analyze sensor characteristics. Next, the preliminary experimental results are presented and key conclusions are drawn. Finally, a compensation for temperature and flow rate is proposed.
5. Compensation Method
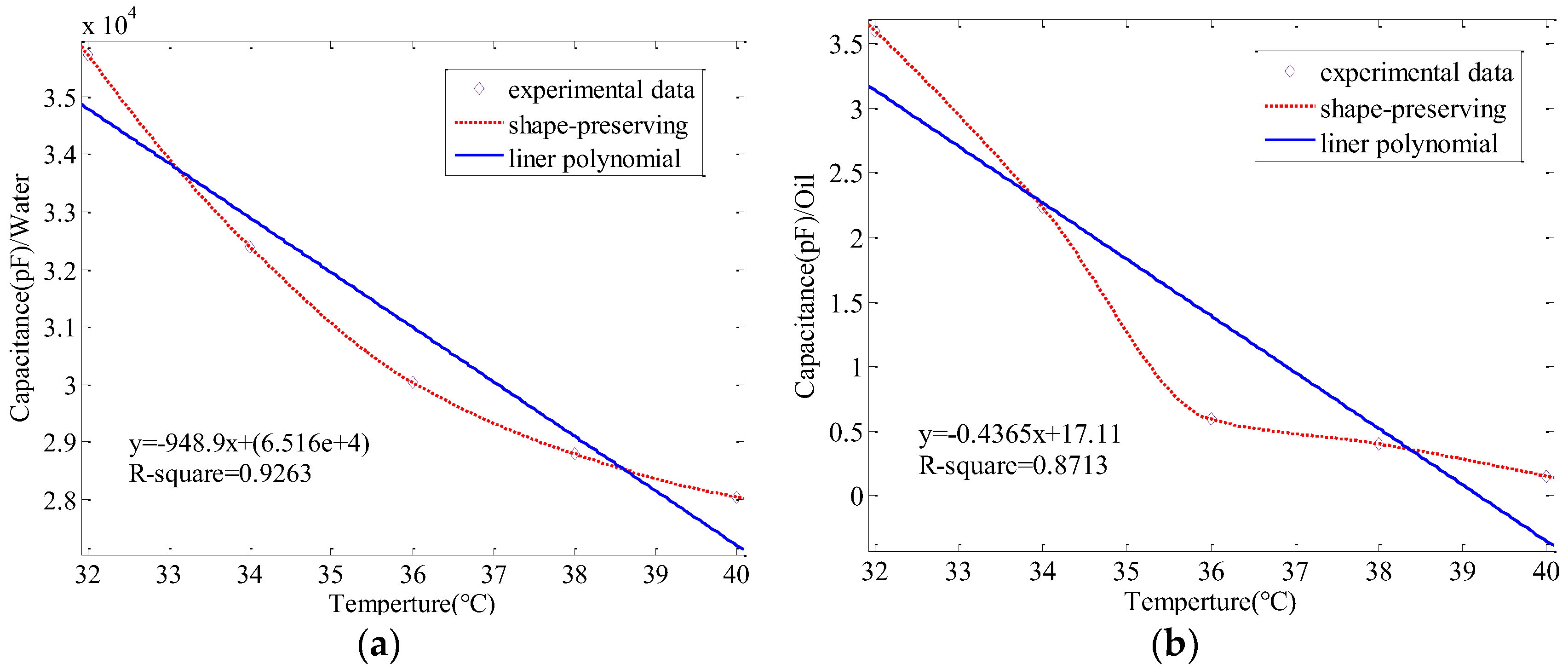
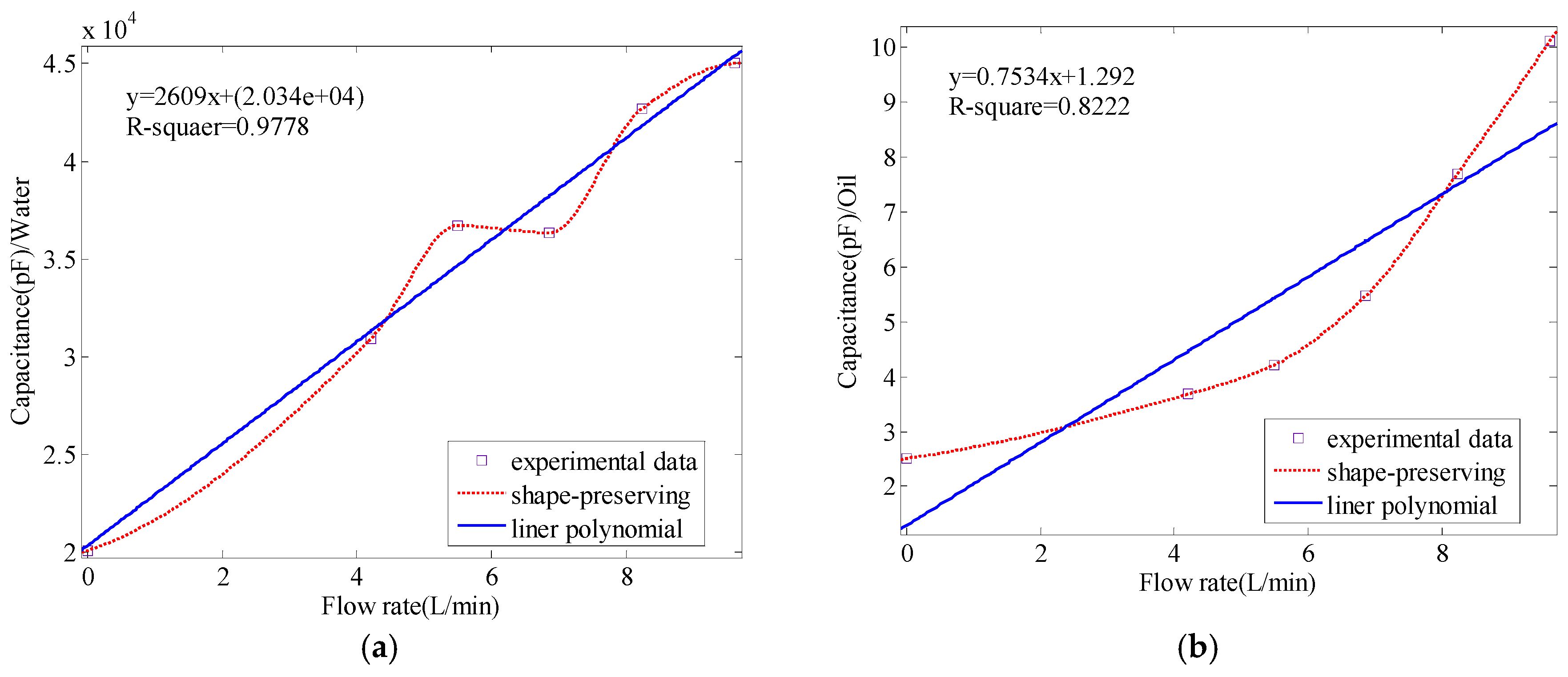
Section 4.2 and
Section 4.3 have elucidated the influences of temperature and flow rate. In the actual oil debris detection, the temperature and the flow rate are often varied; this will be detrimental to experimental results and affect judgments about the content of oil debris. Hence, this section proposes a compensation method.
If we assume the relationship between the capacitance and the temperature, the flow rate and the debris quantity as the following:
If the flow rate, the temperature and the debris quantity are changed into
v +
Δv,
t +
Δt and
m +
Δm; the corresponding change in the capacitance can be expressed as follows:
Most of the time, the quantity of wear debris from the engine is unknown. What we can measure is the flow rate change,
Δv, the temperature change,
Δt, and the capacitance change,
ΔC. As stated in
Section 4, the relationship between the measured capacitance and the temperature, the flow rate and the debris quantity can be simplified as a linear relationship in the case of a single parameter. Therefore, the capacitance change caused by the debris can be calculated according to Equation (14) to Equation (16).
Combining Equations (13) and (17), we can acquire the debris quantity using the capacitance change, so the goal of detecting oil debris has come to realization. A set of experimental data was utilized to justify the accuracy of this compensation method.
Because the temperature, 36 °C, is the middle value in temperature experiments, we chose 36 °C as a reference temperature to verify the compensation method. Thus,
Table 3 presents the conditions for a flow rate of 4210 mL/min and no debris, to serve as a baseline. Next, the capacitance was measured when there was 0.4 g debris in the oil with a 9610 mL/min flow rate and a temperature of 40 °C. This data is regarded as an experimental group, as shown in
Table 5.
Hence, according to
Table 4, the capacitance change,
ΔCv, caused by the flow rate is calculated as:
Similarly, according to
Table 3, the capacitance change,
ΔCt, caused by the temperature is calculated as:
The difference in capacitance resulting from changing the experimental condition,
ΔC, is:
These data are listed in
Table 6. The capacitance change,
ΔCm, caused by the debris, can be calculated by Equation (17).
According to
Table 3, the change of capacitance caused by debris,
ΔCm, can be obtained from:
The error between the actual value and the calculated value is:
Considering experiments were conducted in an open environment with large random noises, the error 11.37% can be accepted. This case study verifies the possibility of compensation method for eliminating the influences of the temperature and the flow rate.
6. Conclusions
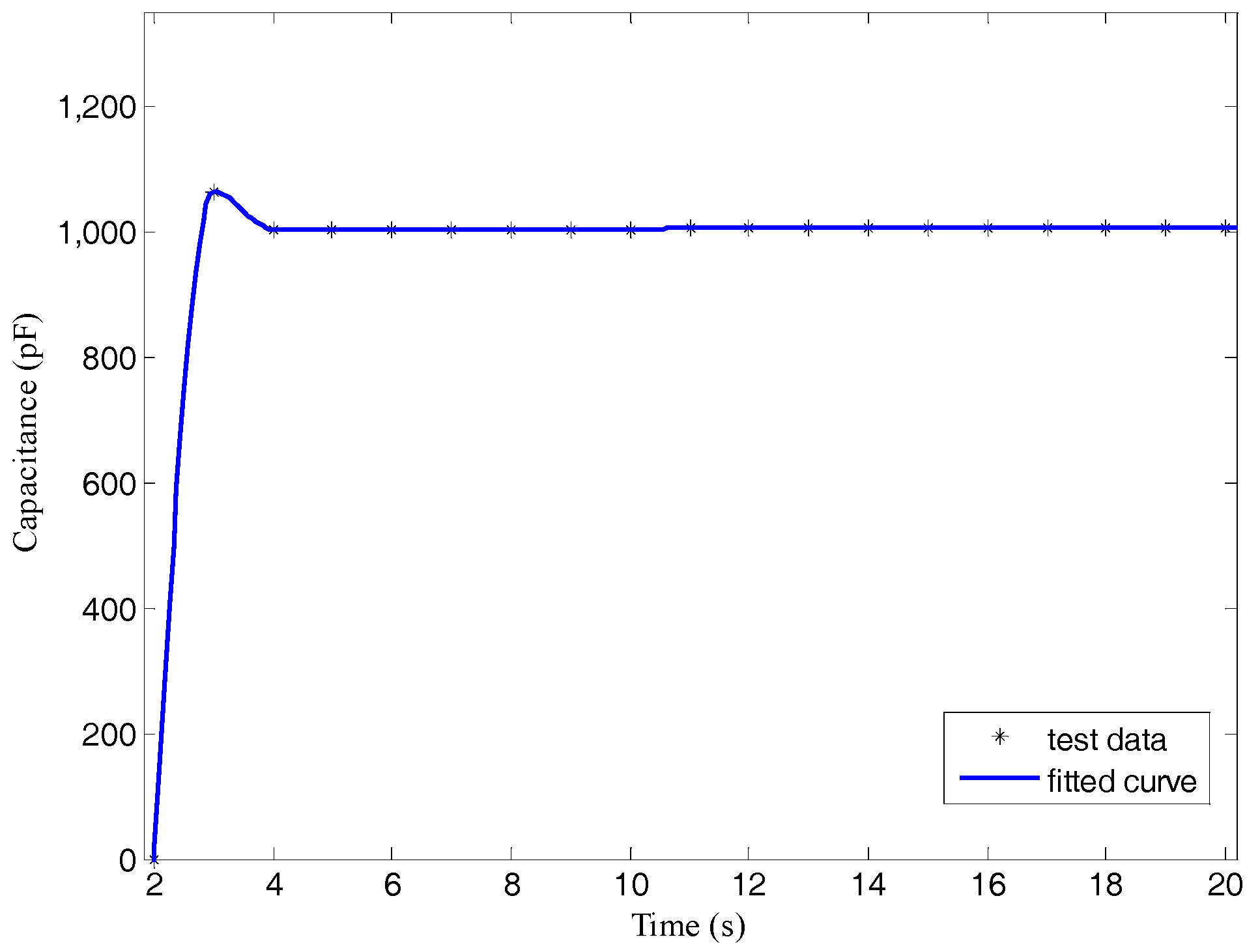
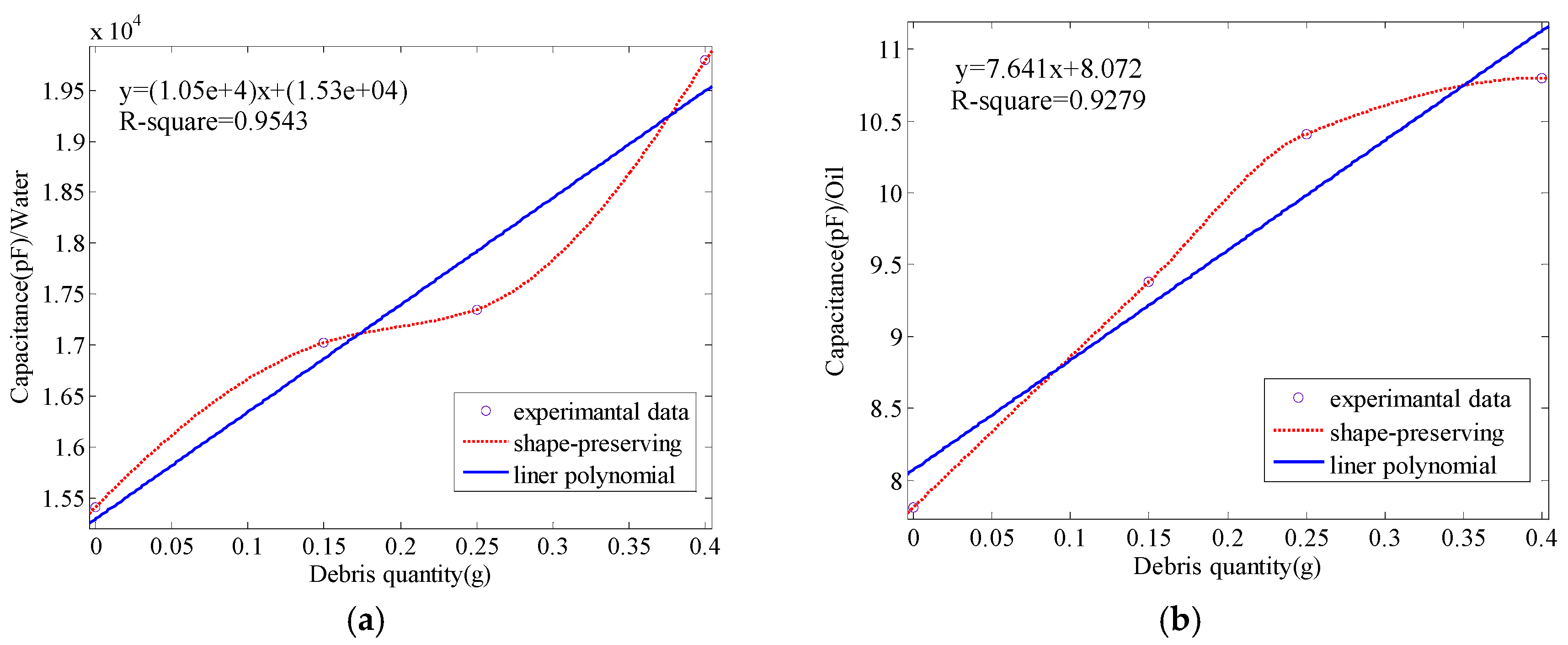
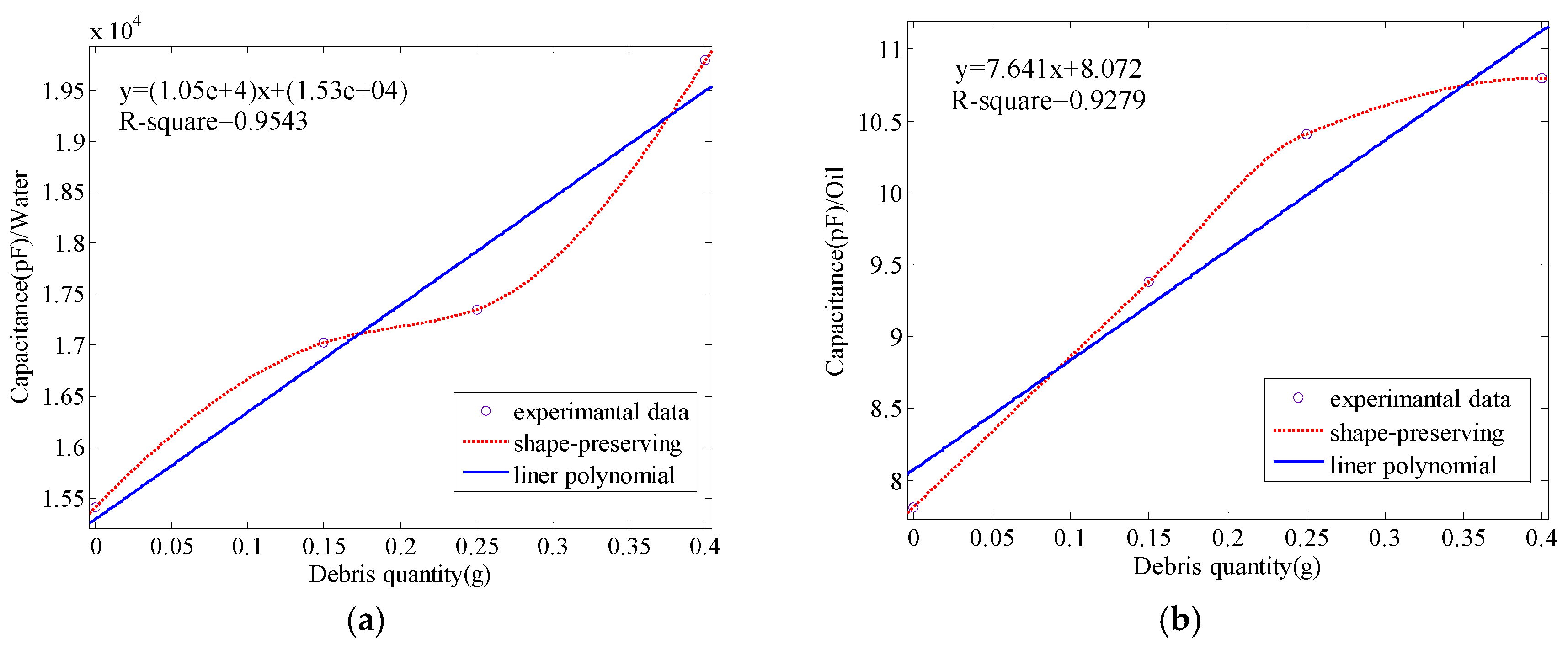
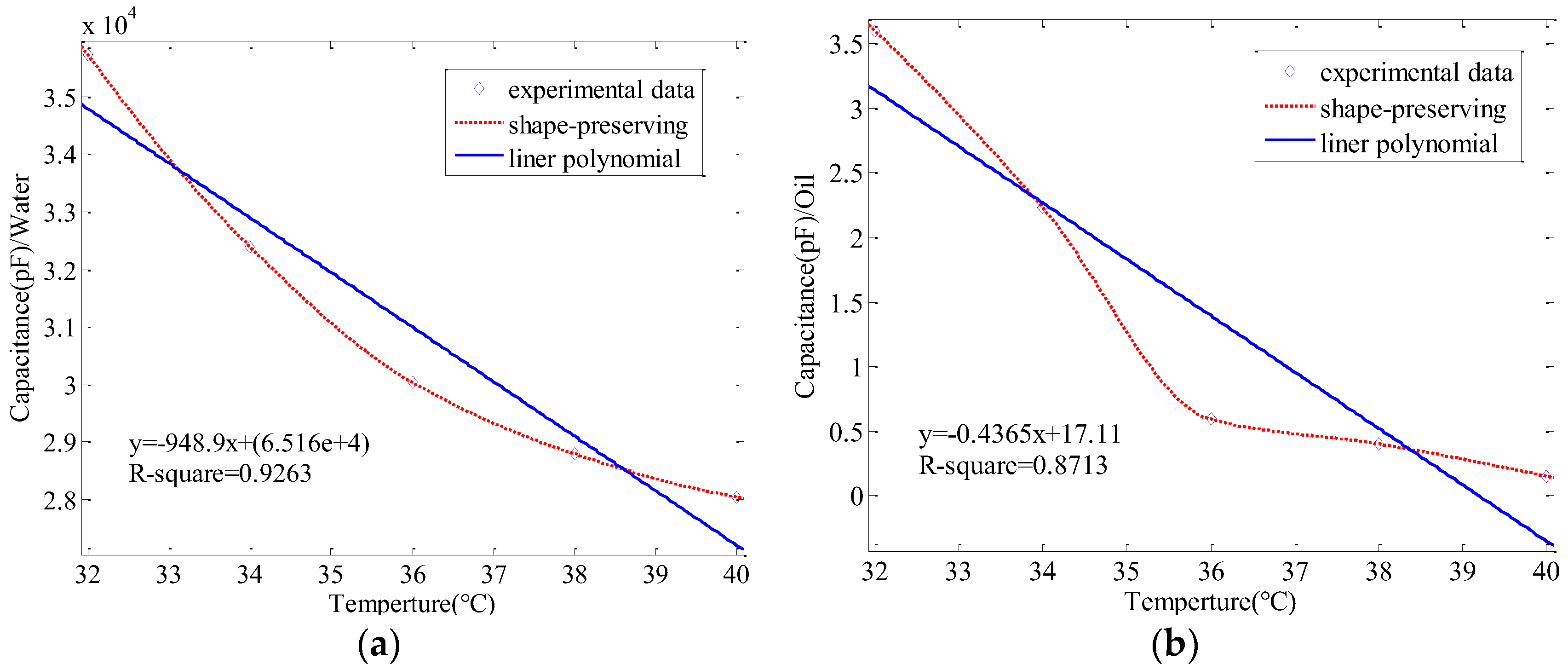
This paper presents a capacitive sensor structure, based on two coaxial cylinders, which is suitable for in-situ monitoring of debris in lubrication oil, and explores its characteristics. Meanwhile, this paper developed a mathematical model to describe the sensing mechanism and relative sensor features. The model proves that capacitance varies linearly with dielectric permittivity. To illustrate the relationship between debris and the capacitive sensor and verify the mathematical model, an experimental device was set up. The experiment verified that the proposed sensor configuration can characterize the debris using capacitance values. It was found that the capacitance values increased almost linearly when the debris quantity increased. Furthermore, a similar pattern was found when the temperature or the flow rate changed. These experimental results coincided with the mathematical model.
In order to eliminate the influences caused by the temperature and the flow rate, this study proposed a compensation method. The method is based on the linear characteristics exhibited by the capacitive sensor and has an acceptable accurancy. However, lots of further work is in order to apply the presented method into the application. In particular, it is necessary to optimize the design parameters of the sensor to eliminate the effect of turbulence, as well as considering integration with a real engine and a more accurate compensation method.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}