Wireless Energy Harvesting Two-Way Relay Networks with Hardware Impairments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We have presented a self-powered TWR energy harvesting and signal transmission models for both DF and AF protocols suffered by hardware impairments considered at all nodes.
- We obtained the new signal-to-noise-plus-distortion ratio (SNDR) expressions, and derived the exact analytical expressions of the achievable sum rate and ergodic capacities in integral closed-form for both DF and AF protocols respectively.
- In order to obtain more engineering insights, we formulate and solve the optimal power splitting (OPS) ratio that maximizes the instantaneous achievable sum rate for both DF and AF protocols.
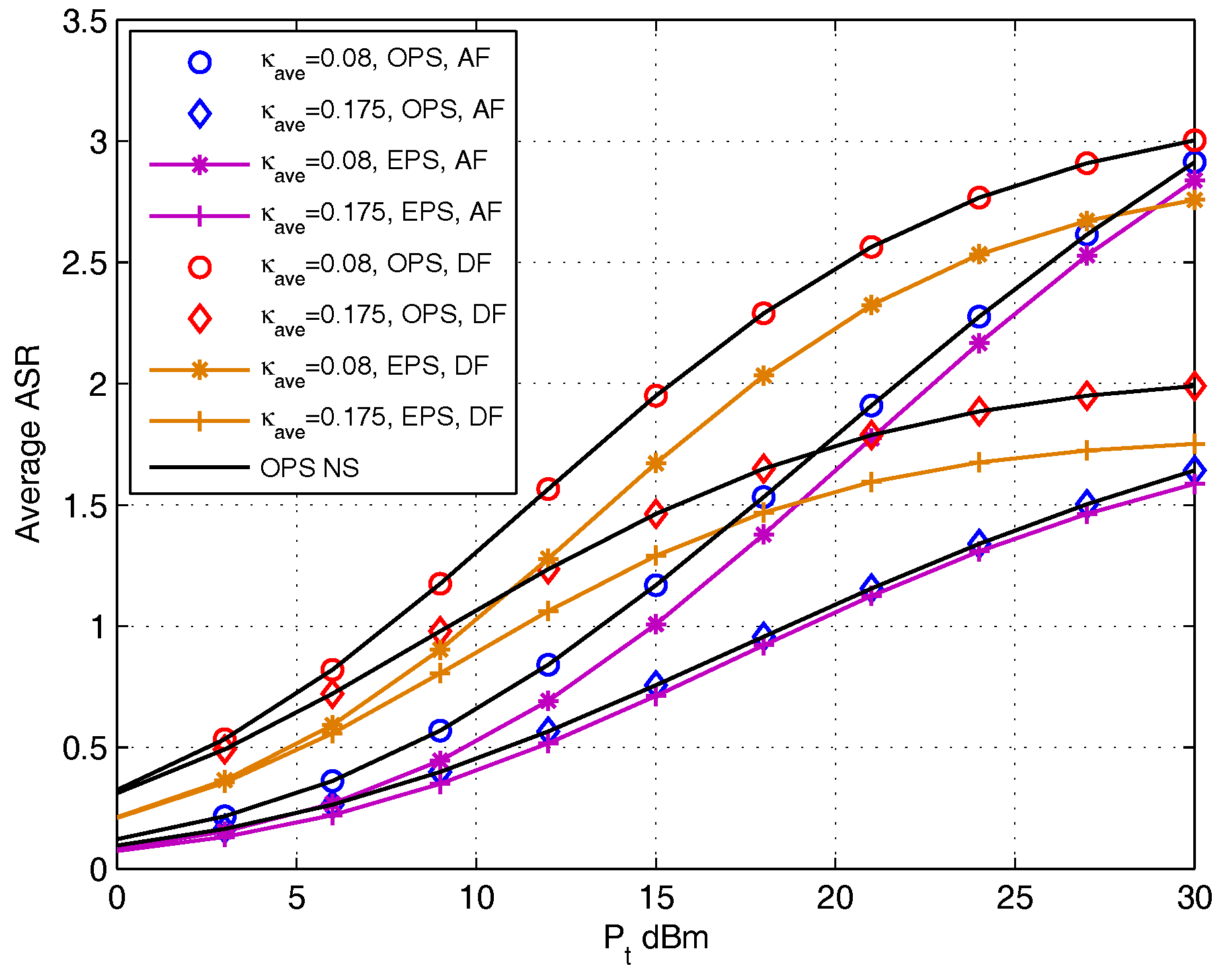
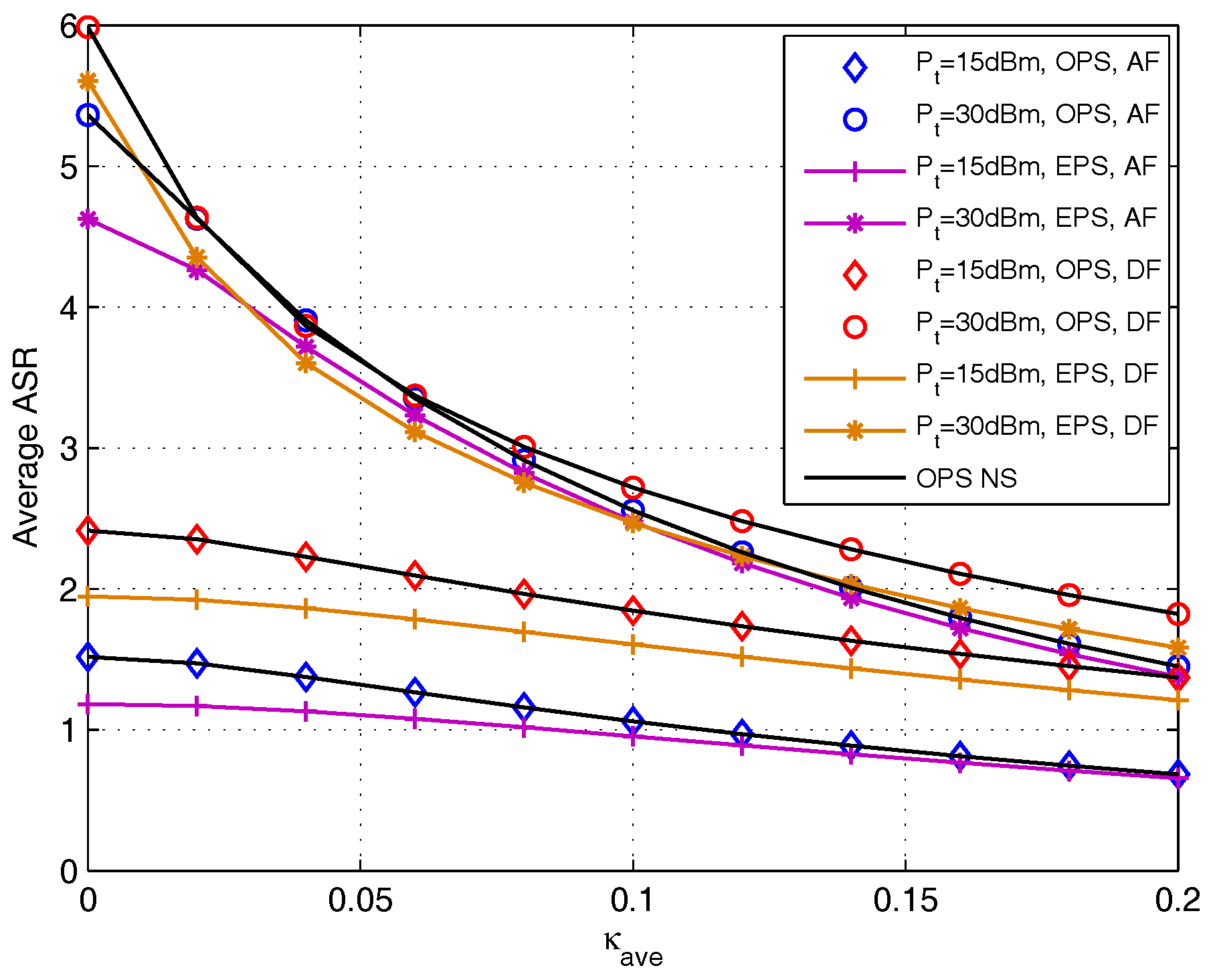
- Simulation and numerical results are presented to verify our derivation and to assess the effects of various parameter settings on system performance. The achieved sum rate with the OPS design are compared that with the equal power splitting (EPS) design, and the performance of DF and AF protocols are also compared and discussed.
2. System and Signal Model
2.1. TWR EH and Hardware-Impairment-Distortion Model
2.2. Information Transmission in TWR
2.3. Instantaneous Achievable Sum Rate: DF Relaying
2.4. Instantaneous Achievable Sum Rate: AF Relaying
3. Ergodic Capacities Analysis
3.1. Ergodic Capacity of DF Relaying
3.2. Capacity of AF Relaying
4. Optimal Power Splitting Design
4.1. The Optimum PS Design for the DF Protocol
4.1.1. Case I:
4.1.2. Case II:
- Subcase 1:Since is a decreasing function in the range of , it is easy to obtain that is also a decreasing function. Thus in this case, the optimum power splitting ratio is .
- Subcase 2:In this case, is an increasing function in the range of and is a decreasing function in the range of . Thus, is a concave function and obtain its maximum at .
- Subcase 3:is an increasing function in the range of . So in this case is an increasing function of . Its optimum is laid on the border .
4.2. The Optimum PS Design of AF Protocol
5. Numerical Results
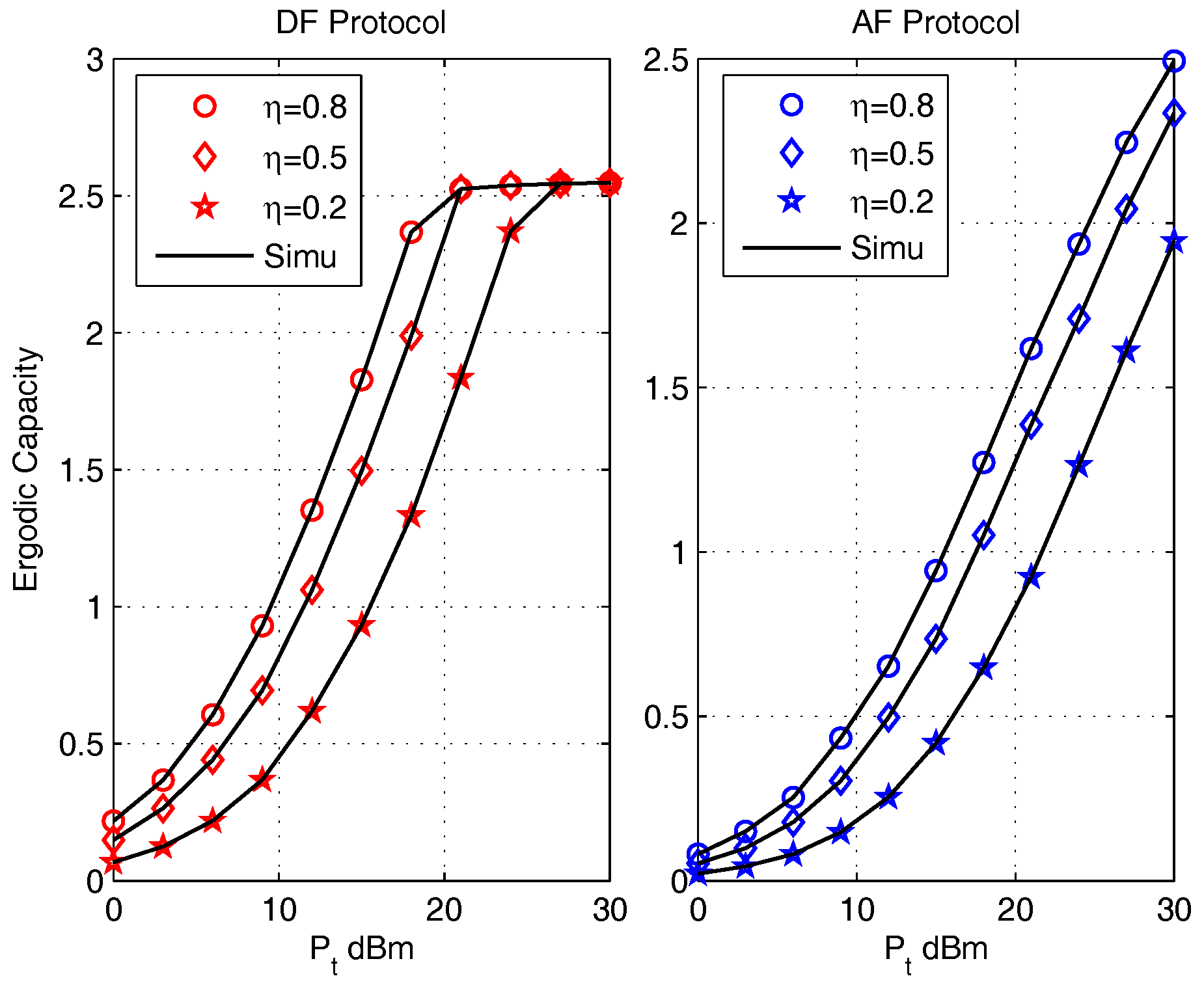
5.1. Effects of Various Parameters on Ergodic Capacity
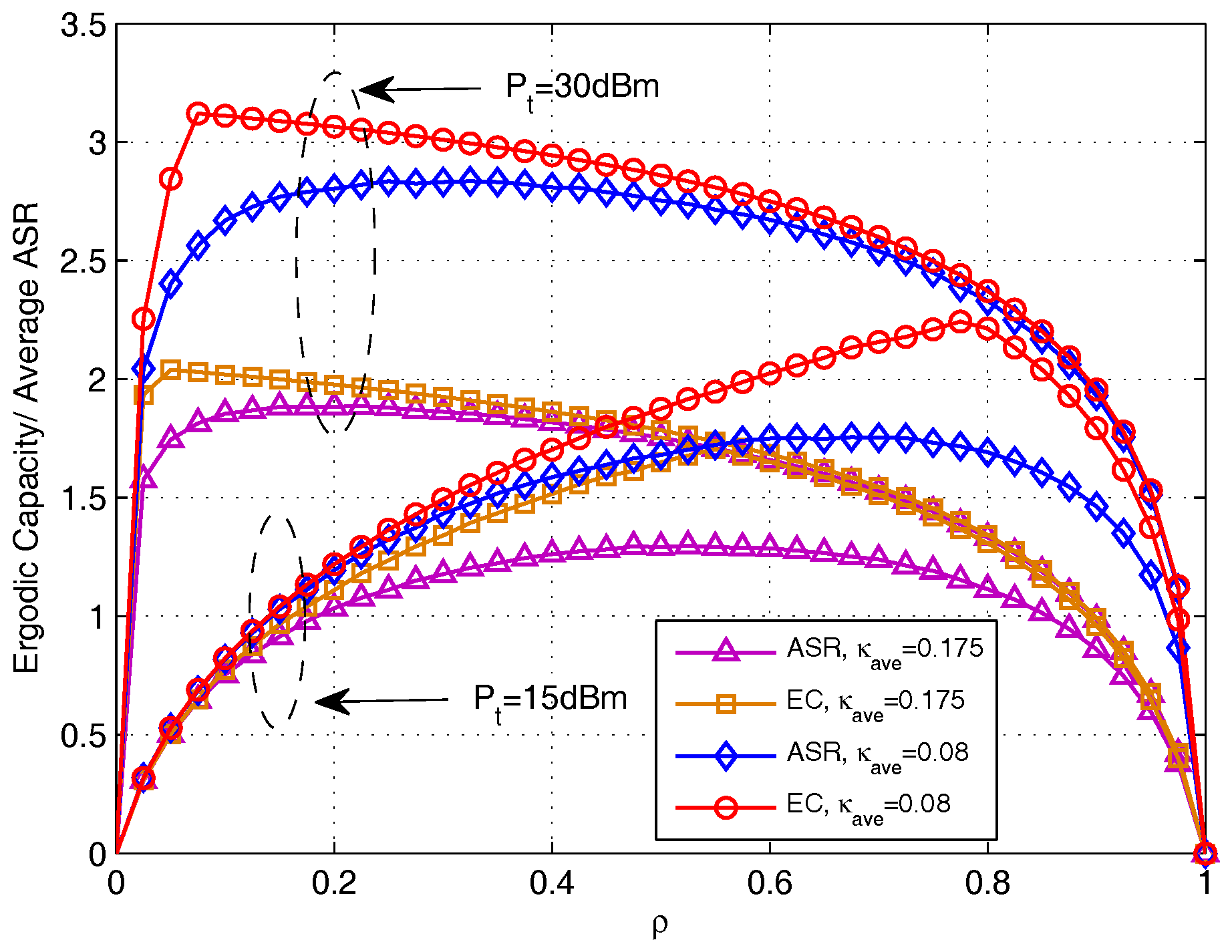
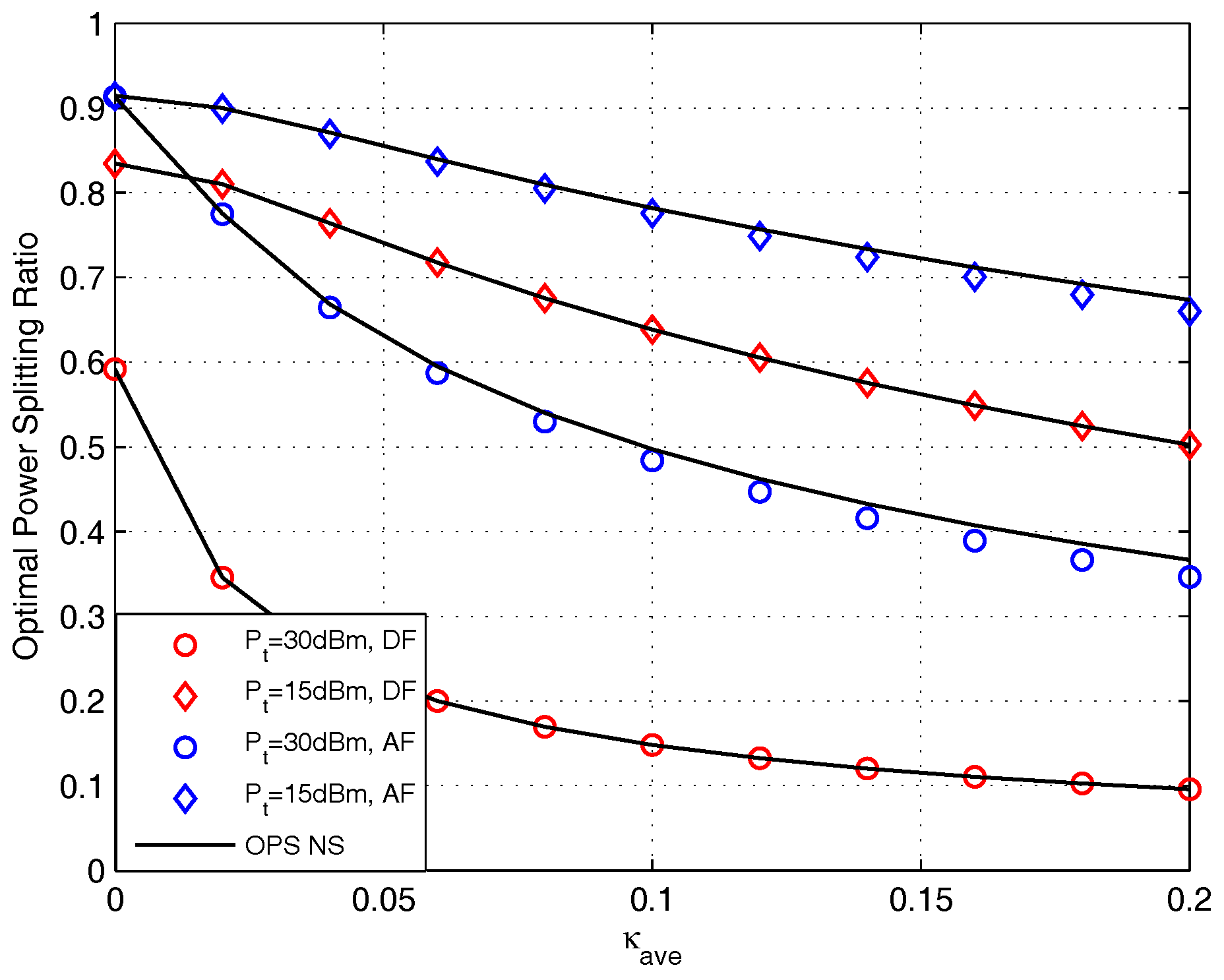
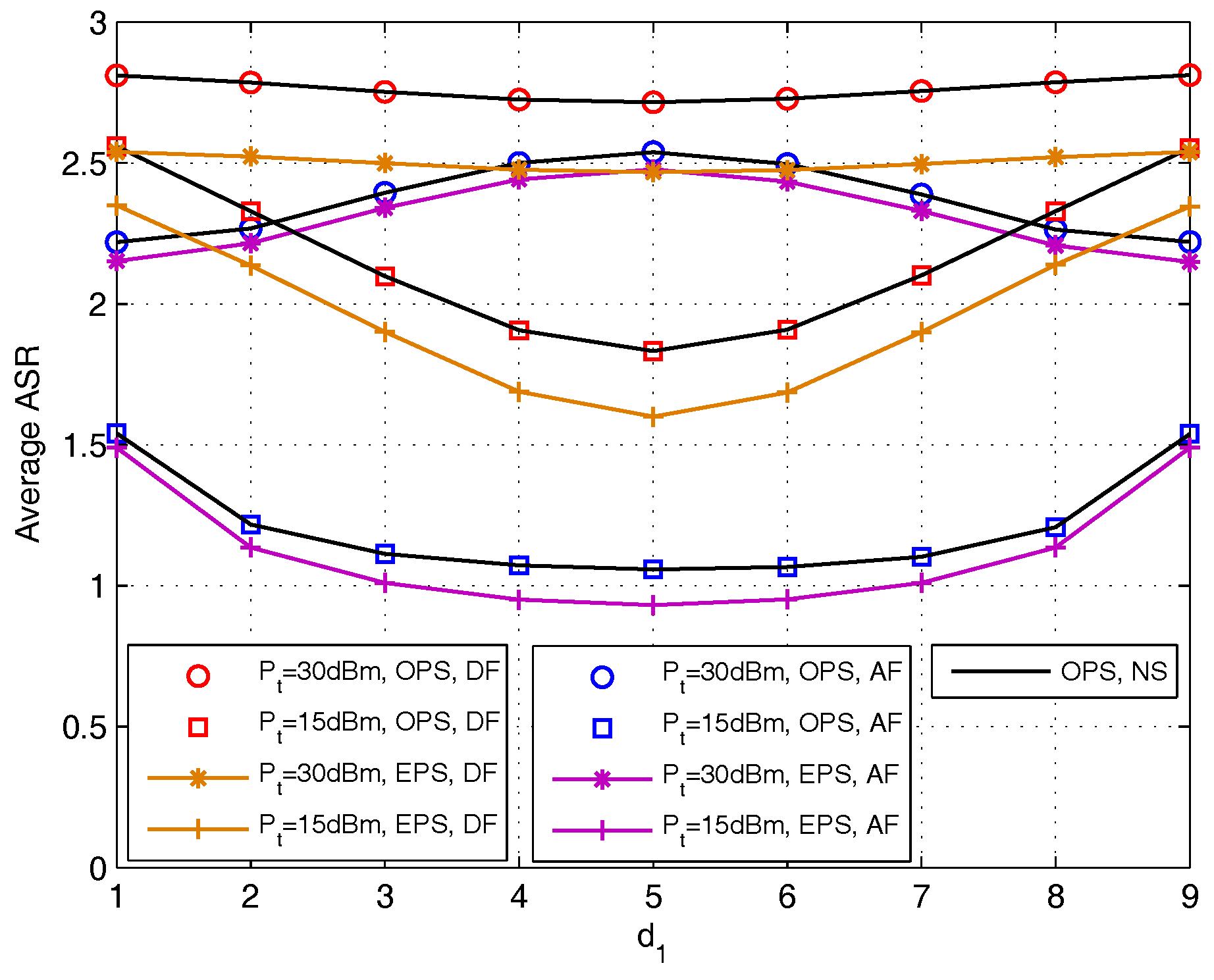
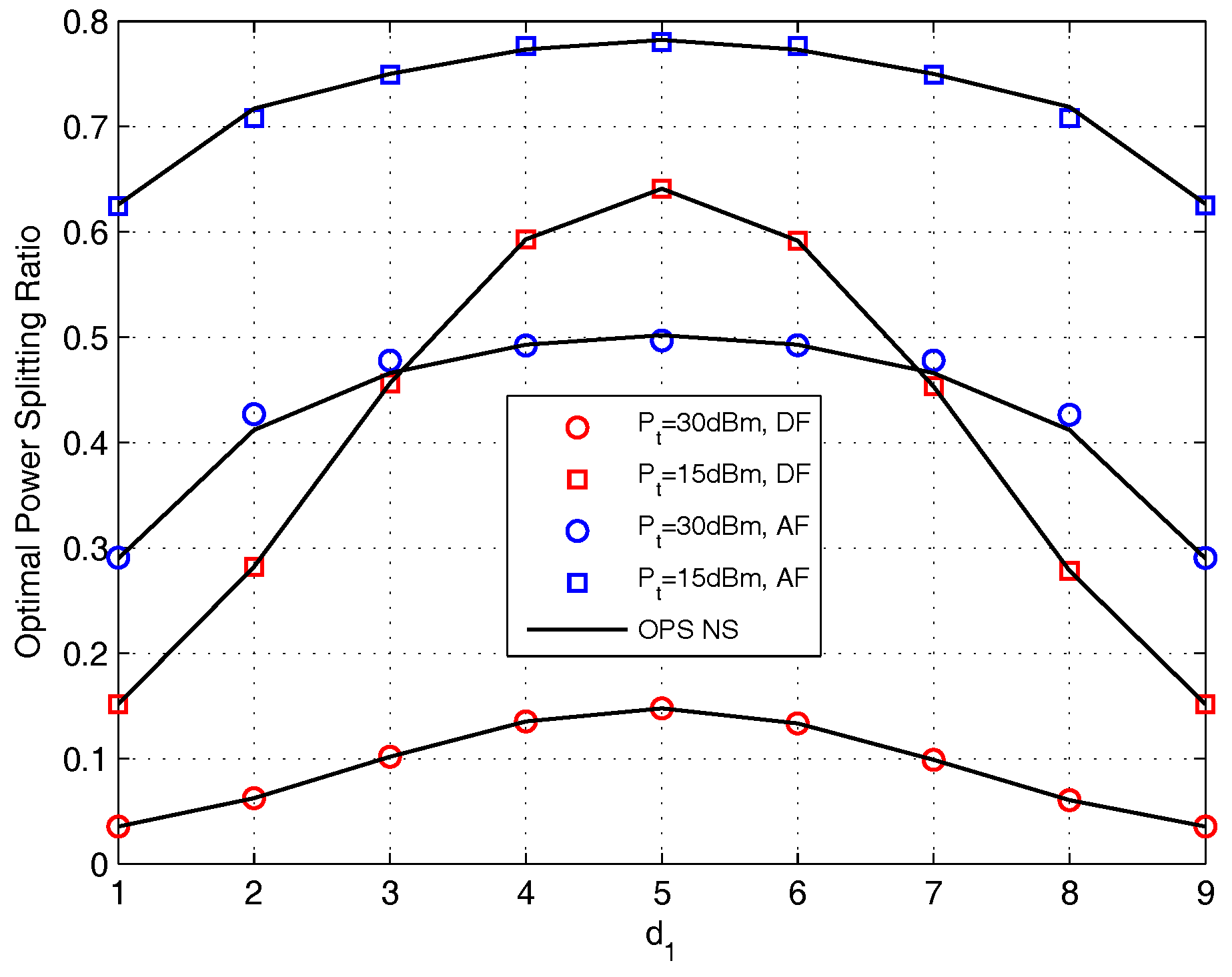
5.2. Effects of Various Parameters on OPS design
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
Appendix B.1. The Derivation of
Appendix B.2. The Derivation of
Appendix B.3. The Derivation of
Appendix C
Appendix D
References
- Guo, S.; Wang, F.; Yang, Y.; Xiao, B. Energy-Efficient Cooperative Transmission for Simultaneous Wireless Information and Power Transfer in Clustered Wireless Sensor Networks. IEEE Trans. Commun. 2015, 63, 4405–4417. [Google Scholar] [CrossRef]
- Ahmed, M.E.; Kim, D.I. Traffic-Pattern Aware Opportunistic Wireless Energy Harvesting in Cognitive Radio Networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Wang, C.; Guo, S.; Yang, Y. An optimization framework for mobile data collection in energy-harvesting wireless sensor networks. IEEE Trans. Mob. Comput. 2016, 15, 2969–2986. [Google Scholar] [CrossRef]
- Guo, S.; Wang, C.; Yang, Y. Joint mobile data gathering and energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 2836–2852. [Google Scholar] [CrossRef]
- Xiao, L.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless Ne tworks With RF Energy Harvesting: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2015, 17, 757–789. [Google Scholar]
- Zhang, R.; Maunder, R.G.; Hanzo, L. Wireless information and power transfer: from scientific hypothesis to engineering practice. IEEE Commun. Mag. 2015, 53, 99–105. [Google Scholar] [CrossRef]
- Varshney, L.R. Transporting Information and Energy Simultaneously. In Proceedings of the IEEE International Symposium on Information Theory, Toronto, ON, Canada, 6–11 July 2008; pp. 1612–1616. [Google Scholar]
- Zhou, X.; Zhang, R.; Ho, C.K. Wireless information and power transfer: Architecture design and rate-energy tradeoff. IEEE Trans. Commun. 2013, 61, 4754–4767. [Google Scholar] [CrossRef]
- Rankov, B.; Wittneben, A. Spectral efficient protocols for half-duplex fading relay channels. IEEE J. Sel. Areas Commun. 2007, 25, 379–389. [Google Scholar] [CrossRef]
- Dai, M.; Wang, P.; Zhang, S.; Chen, B.; Wang, H.; Lin, X.; Sun, C. Survey on cooperative strategies for wireless relay channels. Trans. Emerg. Telecommun. Technol. 2014, 25, 926–942. [Google Scholar] [CrossRef]
- Nasir, A.A.; Zhou, X.; Durrani, S.; Kennedy, R.A. Relaying protocols for wireless energy harvesting and information processing. IEEE Trans. Wirel. Commun. 2013, 12, 3622–3636. [Google Scholar] [CrossRef]
- Yin, S.; Qu, Z.; Zhang, L. Wireless information and power transfer in cooperative communications with power splitting. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Chen, Z.; Xu, P.; Ding, Z.; Dai, X. Cooperative transmission in simultaneous wireless information and power transfer networks. IEEE Trans. Veh. Technol. 2016, 65, 8710–8715. [Google Scholar] [CrossRef]
- Yu, H.; Wang, D.; Pan, G.; Shi, R.; Zhang, J.; Chen, Y. On outage of WPC system with relay selection over Nakagami-m fading channels. IEEE Trans. Veh. Technol. 2017, 99, 8590–8594. [Google Scholar] [CrossRef]
- Chen, Z.; Xia, B.; Liu, H. Wireless information and power transfer in two-way amplify-and-forward relaying channels. In Proceedings of the 2014 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Atlanta, GA, USA, 3–5 Decemebr 2014; pp. 168–172. [Google Scholar]
- Do, T.P.; Song, I.; Kim, Y.H. Simultaneouly wireless information and power transfer in a decode-and-forward two-way relaying network. IEEE Trans. Wirel. Commun. 2017, 13, 1579–1592. [Google Scholar] [CrossRef]
- Costa, E.; Pupolin, S. m-QAM-OFDM system performance in the presence of a nonlinear amplifier and phase noise. IEEE Trans. Wirel. Commun. 2002, 50, 462–472. [Google Scholar] [CrossRef]
- Schenk, T. RF Imperfections in High-Rate Wireless Systems: Impact and Digital Compensation; Springer International Publishing: Cham, Switzerland, 2008. [Google Scholar]
- Bjornson, E.; Debbah, M. A new look at dual-hop relaying: performance limits with hardware impairments. IEEE Trans. Commun. 2013, 61, 4512–4525. [Google Scholar] [CrossRef]
- Matthaiou, M.; Papadogiannis, A.; Bjornson, E.; Debbah, M. Two-way relaying under the presence of relay transceiver hardware impairments. IEEE Commun. Lett. 2013, 17, 1136–1139. [Google Scholar] [CrossRef]
- Huang, H.; Li, Z.; Ai, B.; Wang, G.; Obaidat, M.S. Impact of hardware impairment on spectrum underlay cognitive multiple relays network. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar]
- You, J.; Liu, E.; Wang, R.; Su, W. Joint source and relay precoding design for MIMO two-way relay systems with transceiver impairments. IEEE Commun. Lett. 2017, 21, 572–575. [Google Scholar] [CrossRef]
- Do, N.T.; Costa, D.B.D.; An, B. Performance analysis of multirelay RF energy harvesting cooperative networks with hardware impairments. IIEEE IET Commun. 2016, 10, 2551–2558. [Google Scholar] [CrossRef]
- Nguyen, D.K.; Jayakody, D.N.K.; Chatzinotas, S.; Thompson, J.; Li, J. Wireless energy harvesting assisted two-way cognitive relay networks: protocol design and performance analysis. IEEE Access 2017, 5, 21447–21460. [Google Scholar] [CrossRef]
- Holma, H.; Toskala, A. LTE for UMTS: Evolution to LTE-Advanced; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Kim, S.; Devroye, N.; Mitra, P.; Tarokh, V. Achievable rate regions and performance comparison of half duplex bi-directional relaying protocols. IEEE Trans. Inf. Theory 2011, 10, 6405–6418. [Google Scholar] [CrossRef]
- Xiong, K.; Shi, Q.; Fan, P.; Leitaief, K.B. Resource allocation for two-way relay networks with symmetric data rates: an information theoretic approach. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013; pp. 6060–6064. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products, 4th ed.; Academic Press: Cambridge, MA, USA, 1980. [Google Scholar]













© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.; Li, F.; Liu, H. Wireless Energy Harvesting Two-Way Relay Networks with Hardware Impairments. Sensors 2017, 17, 2604. https://doi.org/10.3390/s17112604
Peng C, Li F, Liu H. Wireless Energy Harvesting Two-Way Relay Networks with Hardware Impairments. Sensors. 2017; 17(11):2604. https://doi.org/10.3390/s17112604
Chicago/Turabian StylePeng, Chunling, Fangwei Li, and Huaping Liu. 2017. "Wireless Energy Harvesting Two-Way Relay Networks with Hardware Impairments" Sensors 17, no. 11: 2604. https://doi.org/10.3390/s17112604
APA StylePeng, C., Li, F., & Liu, H. (2017). Wireless Energy Harvesting Two-Way Relay Networks with Hardware Impairments. Sensors, 17(11), 2604. https://doi.org/10.3390/s17112604