1. Introduction
Research on remote sensing techniques involving unmanned aerial vehicles (UAV) is important to improve search and rescue in disaster-stricken areas because such technologies enable prompt action regardless of the terrain. Search and rescue tasks with UAV rely mainly on vision, which is vulnerable to poor lighting conditions or occlusions. A UAV-embedded microphone array system is expected to be effective for the detection of people needing assistance in disaster-stricken areas. Since a UAV-embedded microphone array system receives rotor and wind noise as well as environmental sounds, the target sound is contaminated by ego-noise and other noise. Sound source processing should be able to localize, and discriminate a target sound from noise. Robot audition software [
1,
2,
3] has been developed to cope with a mixture of sounds contaminated by noise. In particular, the open source robot audition software HARK (Honda Research Institute Japan Audition for Robots with Kyoto University) [
4,
5] provides noise-robust sound processing functions: sound source localization, source separation and recognition of separated sounds. Basic technologies of robot audition have been developed for use in indoor environments, and it is necessary to advance these technologies for use in outdoor environments, such as for search and rescue tasks using UAV. Five main challenges to developing such a system for UAV include:
sound source localization;
sound source separation and sound enhancement;
sound source classification;
real-time processing and intuitive visualization tools;
robustness of the device in outdoor environments.
The first challenge has been addressed in recent years in several studies including as a main research topic to find people in disaster situations, e.g., localization of an emergency signal from a safety whistle [
6], and that of speech with a low signal-to-noise ratio (SNR) [
7,
8,
9]. To locate the source of a sound, algorithms based on multiple signal classification (MUSIC) [
10] are often used because they can effectively localize sound sources in highly noisy environments. In particular, MUSIC based on incremental generalized singular value decomposition with correlation matrix scaling (iGSVD-MUSIC-CMS) developed by Ohata et al. demonstrated good performance under dynamically changing noise [
9]. iGSVD-MUSIC-CMS could localize sound sources in a low SNR environment,
dB. There is a severe trade-off between the speed and performance of the signal processing. Since only offline processing was reported in their evaluation, evaluation in real time is necessary for application to search and rescue tasks.
The second challenge, in order to identify a target sound source in extremely noisy environments, is also important, in two goals: to improve SNR of the target sound and to improve intelligibility of the separated signals. The first goal of the present study was to improve sound source classification (the third challenge). Recent studies on restoration of distorted signals have been reported including: sound source separation with a linear process [
11] and integrated frameworks of sound source separation and classification using end-to-end training [
12,
13]. While the first goal targeted machine listening, the second goal targets human listening, that is, an operator tries to identify a target sound source manually, e.g., by inspecting sound spectrograms or by listening to separated sounds. In this case, intelligibility is a primary requirement. This second goal has not been reported as a function for UAV, although it is important to the UAV operator.
The third challenge, to effectively discriminate a target sound source, such as a human-induced sound, from other sound sources has been investigated [
11,
12,
13], albeit these studies only reported offline processing and did not mention real-time processing.
Regarding the fourth challenge, latency in visualizing flight and sound source information should be as short as possible for efficient operation of UAV. Since UAV operators may be situated far from the UAV, visualization tools should be capable of displaying accurate information regarding UAV location and sound source. Finally, regarding the fifth challenge, to ensure system efficiency, all-weather acoustic sensors and reliability of wireless communication using a Wi-Fi signal that carries acoustic signals, which are necessary in outdoor environments, should be proven.
In this paper, we report the development of a UAV-embedded microphone array system that resolved four of the above five challenges. The third challenge, sound classification, which we regard to be at a higher level than the other four, will be investigated in a separate study. The remaining of the paper is organized as follows:
Section 2 describes the design method and details of the UAV-embedded microphone array system.
Section 3 evaluates and discusses the performance of the system.
Section 4 is the conclusion.
2. Methods
2.1. Design of Water-Resistant Microphone Array for Use Onboard UAV
To address the first and fifth challenges in
Section 1, we designed and developed a microphone array.
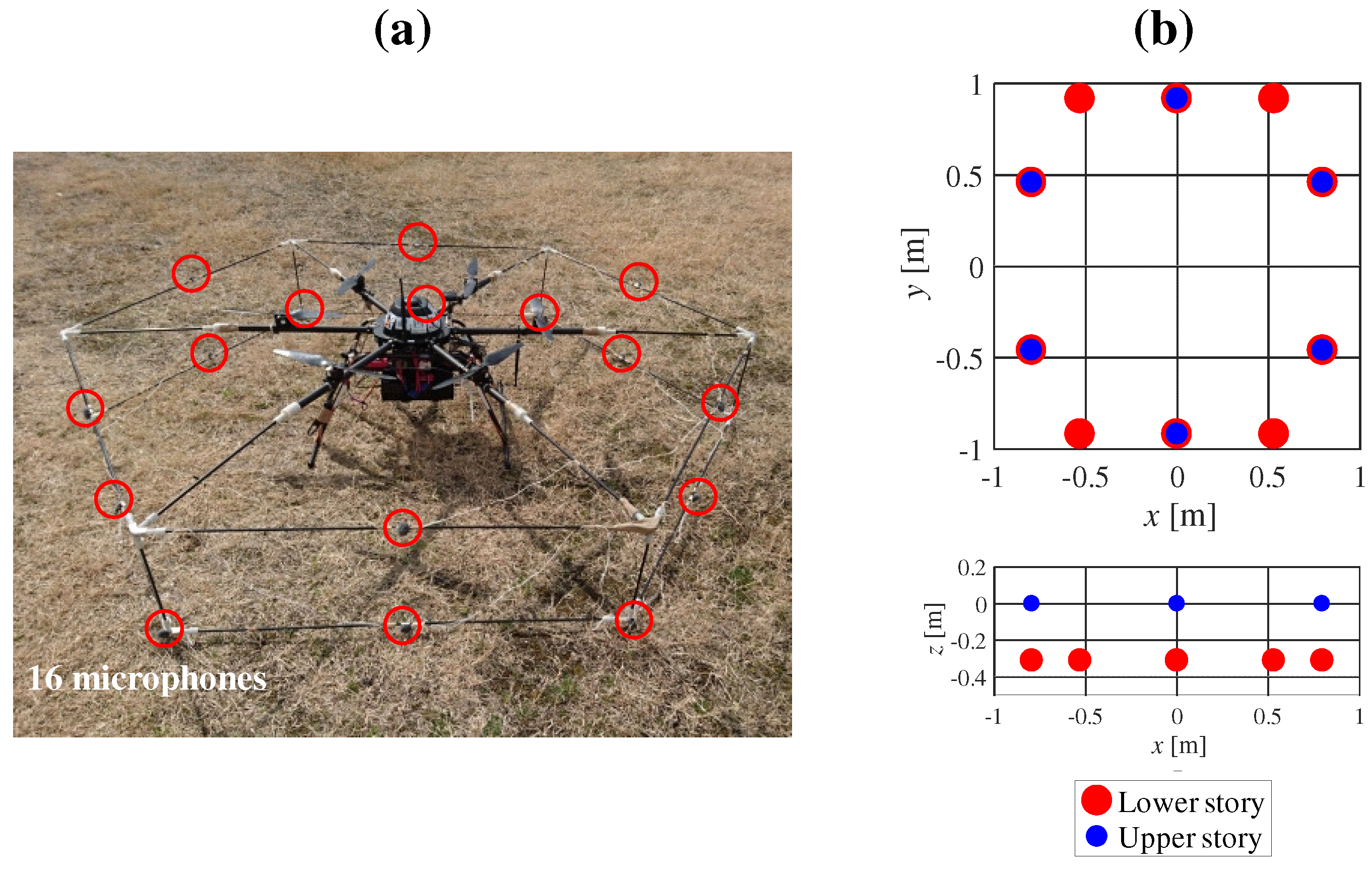
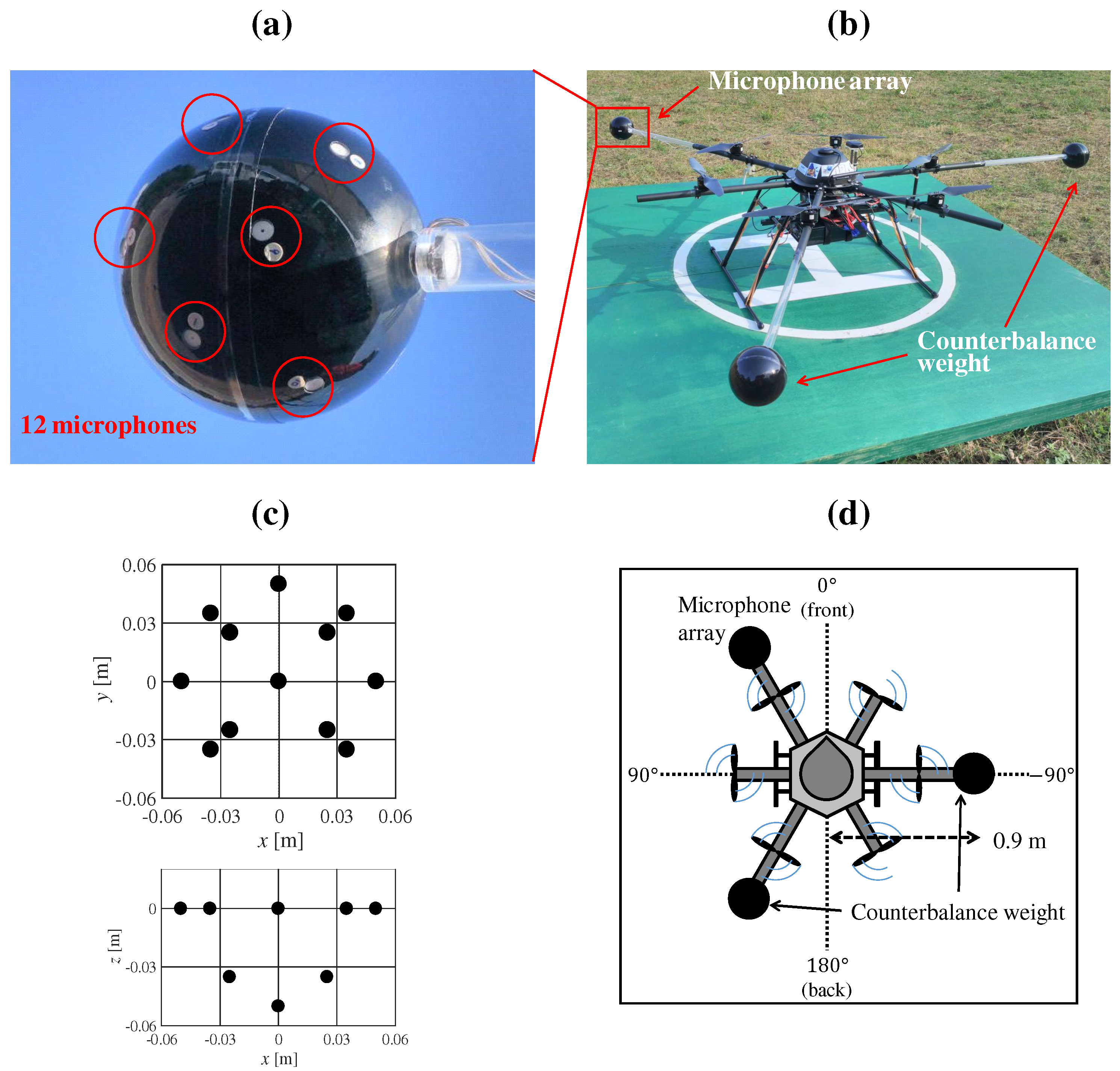
Figure 1 shows our prototype hexagonal microphone array system (HMAS). Sixteen redMEMS (Micro Electro Mechanical Systems) microphones are set on a two-story hexagonal frame whose diagonal length is 1.8 m. The microphones and cables, being exposed, were vulnerable to water, and risk of disconnection. Additionally, the complexity of the frame demanded a lot of time for assembly of the HMAS. To solve these problems, we designed a spherical microphone array system (SMAS), which is water resistant and simple to assemble in a UAV (
Figure 2). As shown in
Figure 2a or
Figure 2c, twelve MEMS microphones are embedded in a spherical body with a diameter of 0.1 m. Since a single strut and one cable connects the array to the UAV, its assembly is simple and the risk of disconnection is reduced. Unlike with the HMAS, where the microphones are equidistant around the UAV, the weight of the UAV is unbalanced with the SMAS. To solve this, we added two weights, each of the same size and mass, to counterbalance the SMAS. As shown in
Figure 2d, the SMAS and weights are set at intervals of
, and the direction of the SMAS is
on the UAV coordinates.
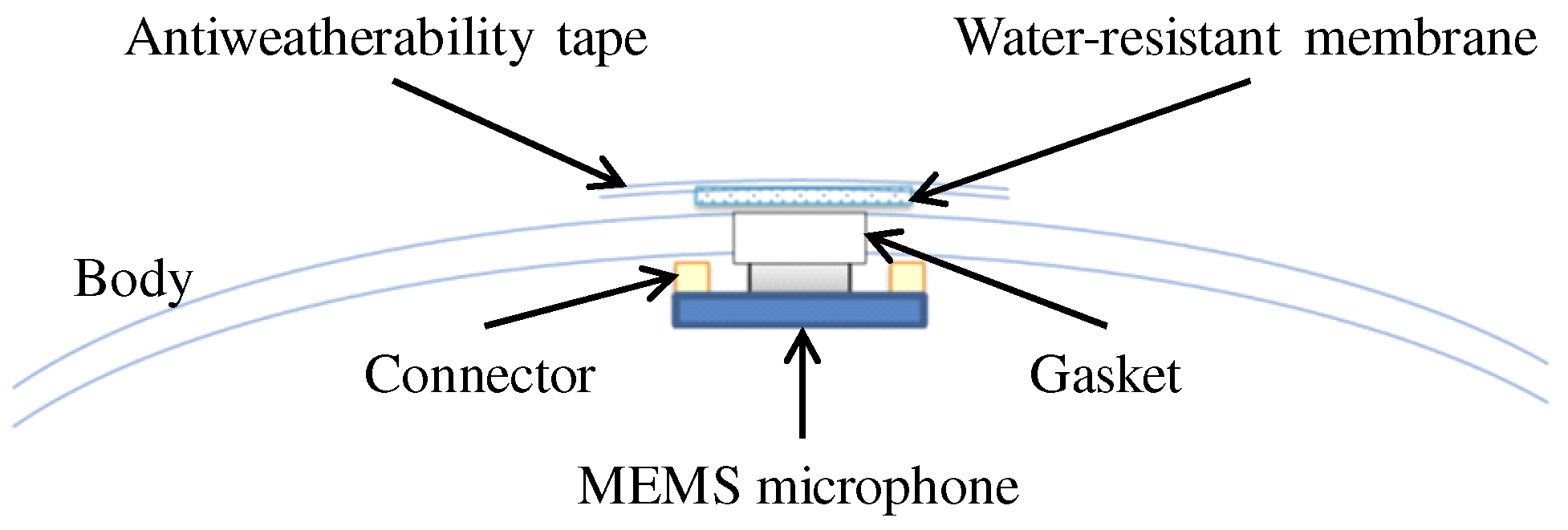
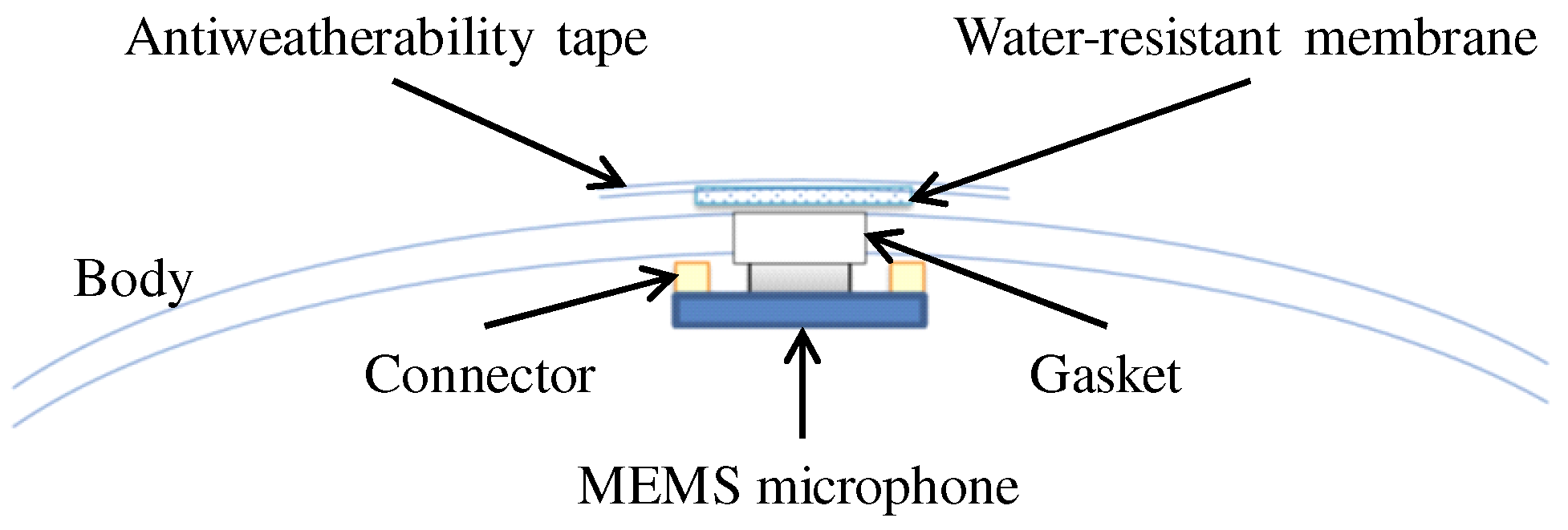
Figure 3 shows internal structure of the SMAS. To embed microphones into the body, gaskets were used. The microphone was attached to the gasket so that holes of the microphone and the gasket were coincident. When there is a gap between the microphone and the body, the microphone cannot receive acoustic signals precisely because of reverberations in the body. To fill gaps between microphones and the body, ring-shaped connectors were used. To ensure water resistance of the SMAS, holes of gaskets were covered with a water-resistant membrane and an antiweatherability tape. Since a water-resistant membrane and an antiweatherability tape are enough thin to pass acoustic signals through, they do not influence signals received by microphones.
2.2. Stabilization of Wireless Communication
To resolve the fifth challenge, to stabilize wireless communication, we incorporated a high-gain antenna that could receive a Wi-Fi signal from the UAV, which carries acoustic signals at a ground station. In addition, a communication protocol was also implemented to improve robustness.
For sound source localization, acoustic signals recorded by SMAS on the UAV are sent via wireless communication using a Wi-Fi signal to a ground station, and processed by a computer. A network system was constructed by assuming that the distance between the UAV and the ground station is short. However, in an outdoor environment, the network communication has the potential to be unstable as the distance increases. To ensure reliable wireless communication, two improvements were made.
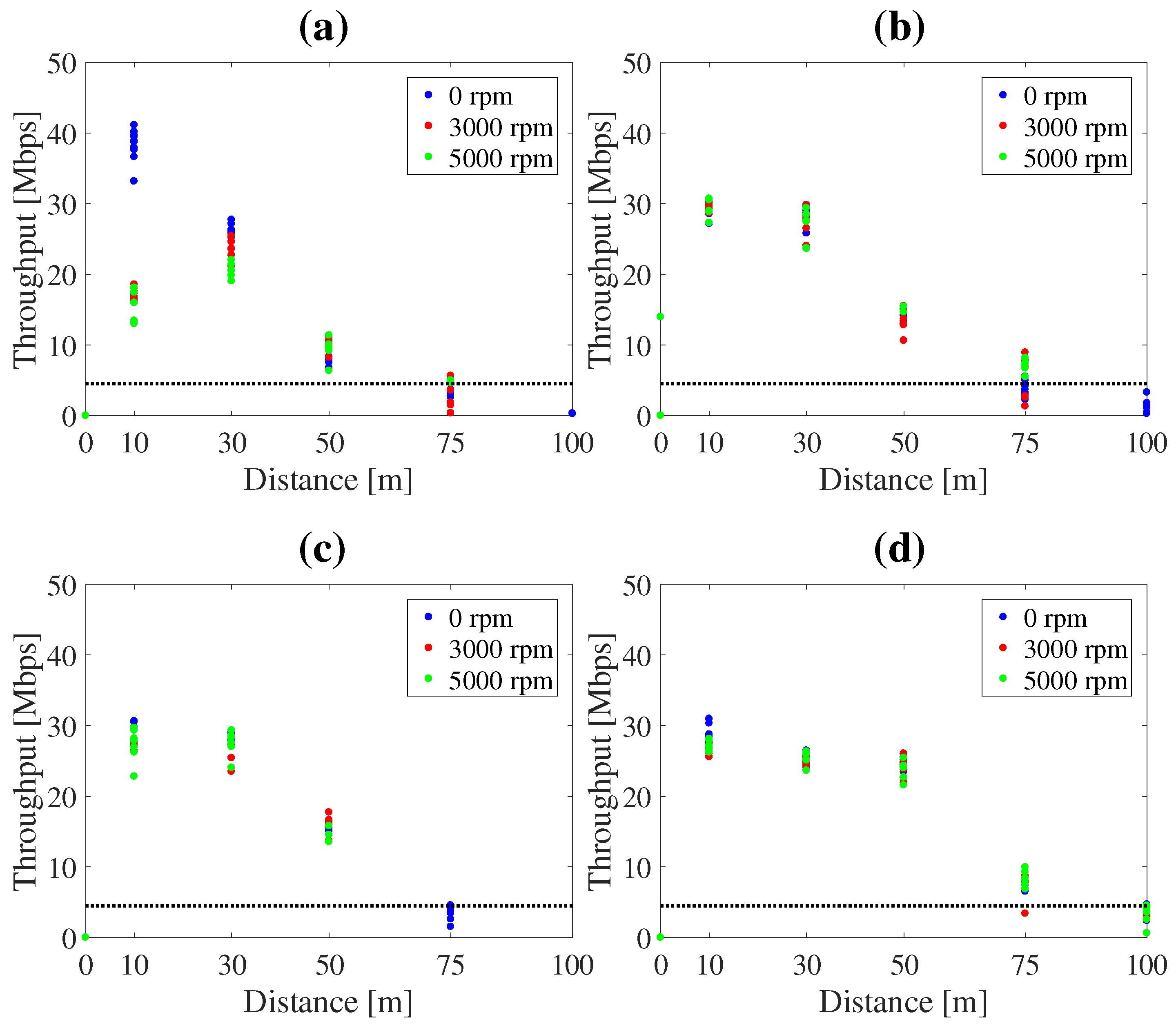
First, we replaced an antenna at the ground station with the Yagi antenna (FX-ANT-A5, CONTEC (Osaka, Japan)) [
14] to improve throughput of communication [
15]. For acoustic signals recorded by 12 microphones, throughput of approximately 5 Mbps is necessary. Therefore, a high gain antenna was used for reliable wireless communication in outdoor environments.
Figure 4 shows antennas (FX-ANT-A7, CONTEC) [
16] on the UAV and the Yagi antenna at a ground station. On the UAV, two antennas was assembled to arms of UAV. At a ground station, the Yagi antenna was set on a tripod.
Second, we changed the communication protocol from TCP (Transmission Control Protocol) to UDP (User Datagram Protocol). In wireless communication tests at tens of meters of distance between the hovering UAV and the ground station, packet loss occurred approximately 400 times per minute. With TCP, each packet loss caused a retransmission request, greatly reducing acoustic signal throughput. Hence, the protocol was changed to UDP. Because UDP provides no guarantee of data integrity, no retransmission request is sent and throughput is maintained. When a packet loss occurs, the ground station receives defective acoustic signals. However, because the minimum frame size for sound source localization is much larger than one packet, the impact is negligible.
2.3. Development of Intuitive Visualization Tools for Operators
For the second and fourth challenges, we developed three visualization tools that display information regarding the sound source on the UAV coordinates and acoustic signals before and after their enhancement.
Essential to the system is a visualization tool to display sound source localization results. Several groups have developed such a tool for sound source localization [
17,
18,
19].
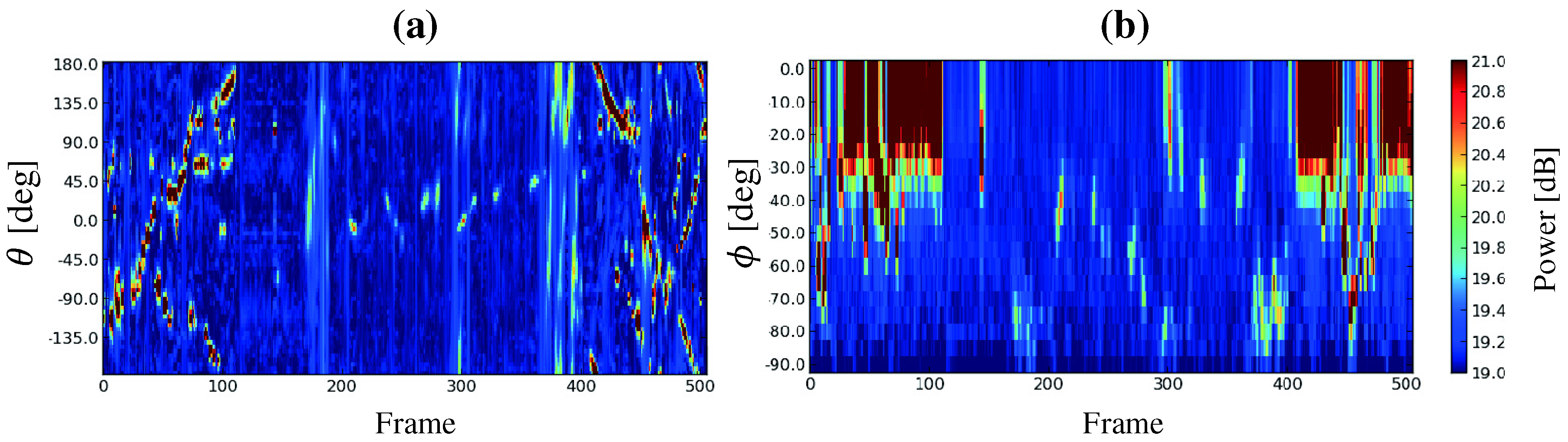
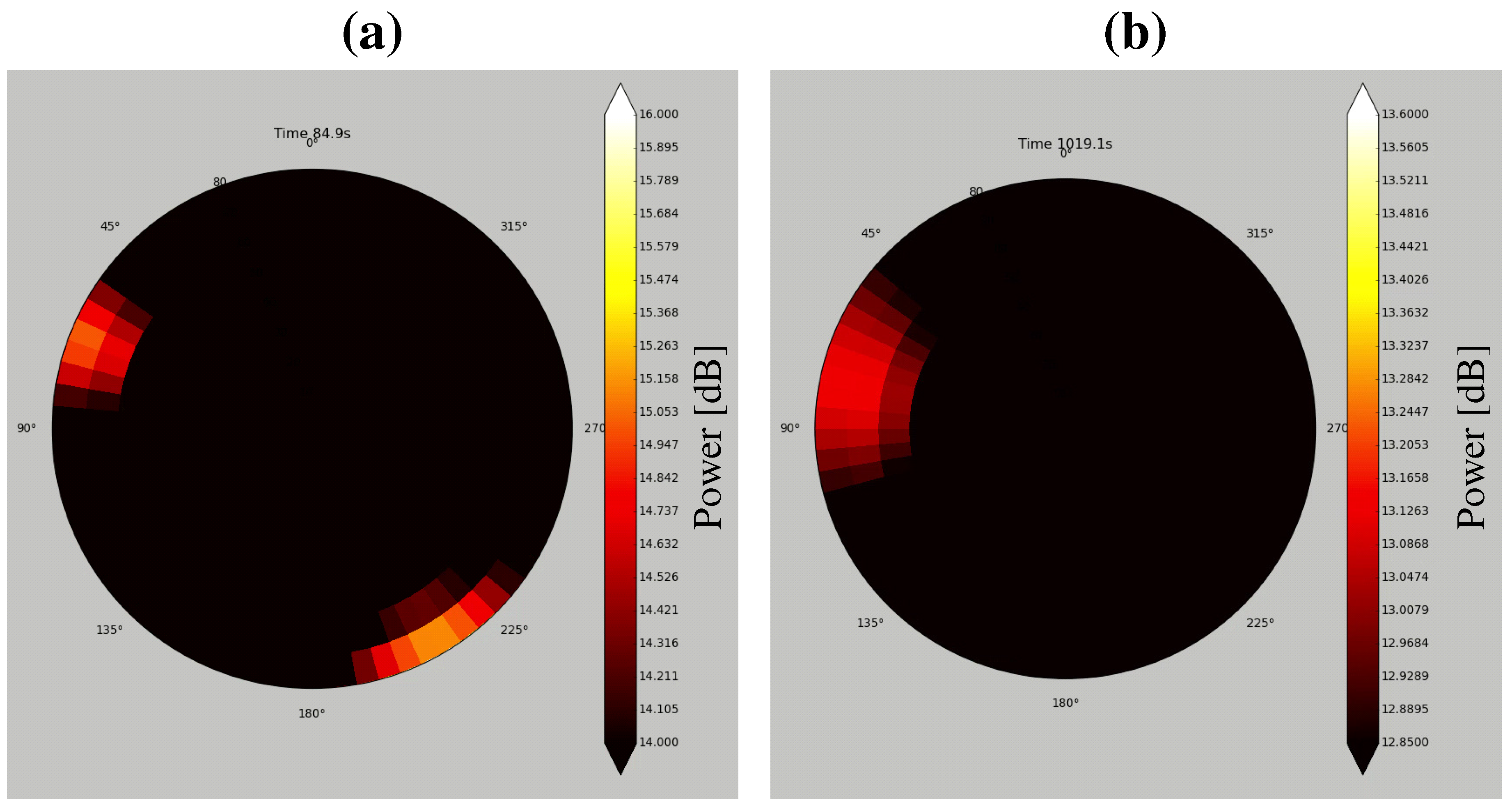
Figure 5 shows MUSIC spectra produced by the MUSIC method [
10]. It visualizes sound power arriving from each direction. The horizontal axis represents the frame number (time) and the vertical axis represents the azimuth angle
(
a) or the elevation angle
(
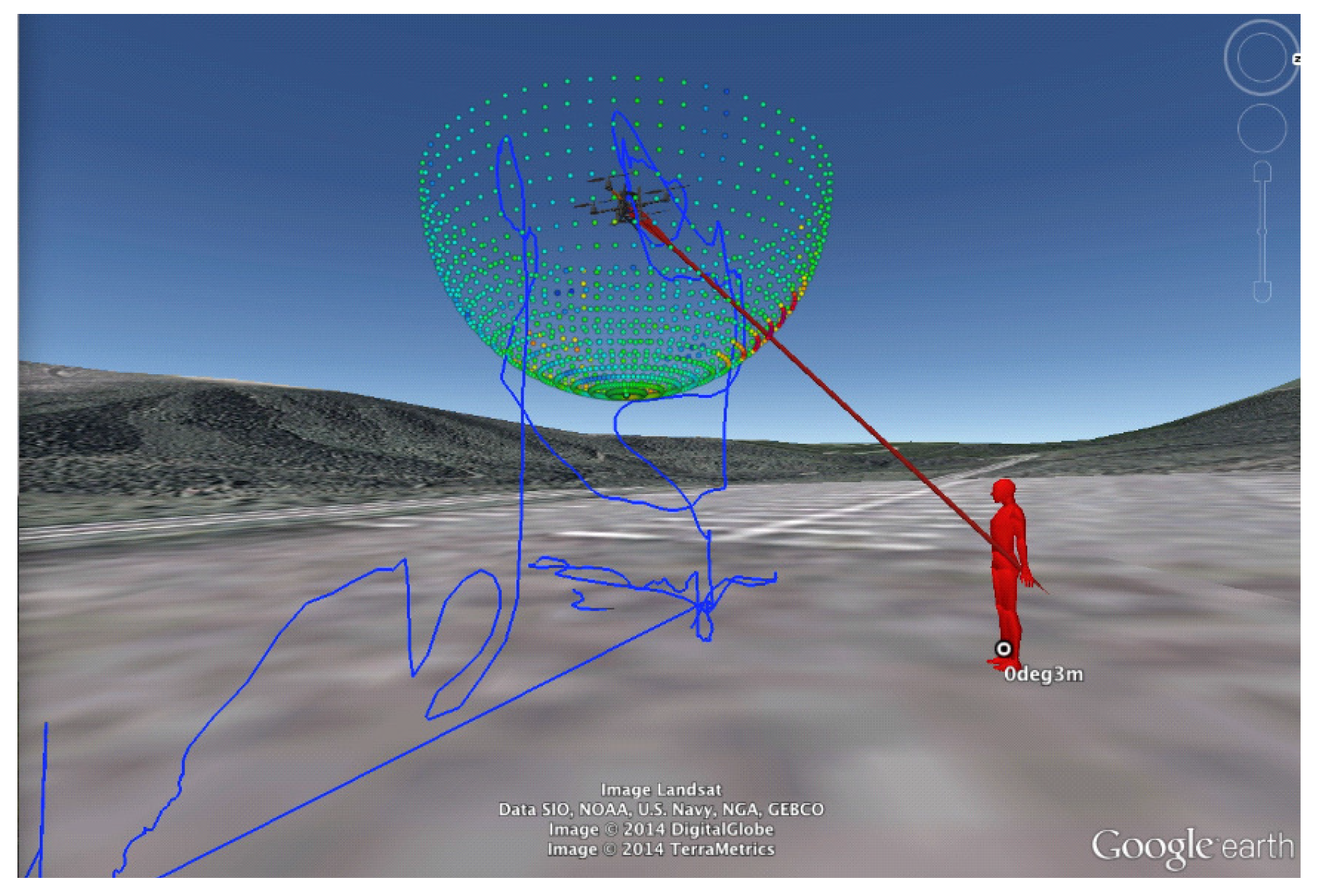
b). The sound power is represented as a color map. It is difficult to quickly determine the direction and time of a sound source with the MUSIC spectrum. In order to visualize sound source localization and the UAV location and orientation, we developed a tool to display such data on Google Earth
TM (Google (Los Angeles, CA, USA)) (
Figure 6) [
20]. Because users can change their viewpoint freely on Google Earth
TM, they can intuitively grasp the situation of the environment, the UAV, and the sound source. However, this tool is for observers only and not for the operator. Unlike an indoor environment, in an outdoor environment, the distance between the UAV and the operator may be large, necessitating a tool for its effective operation. Therefore, we developed visualization tools for operators.
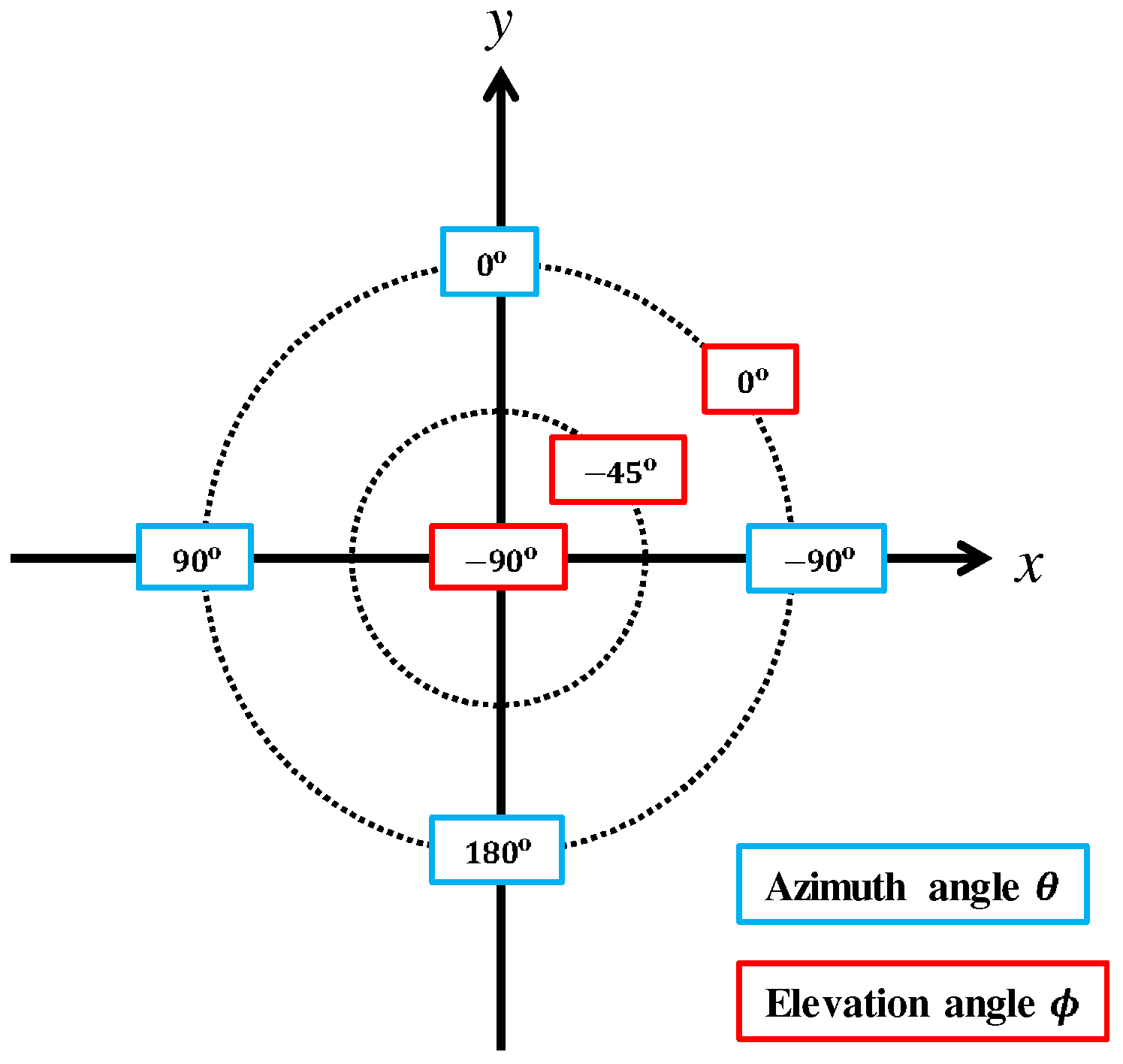
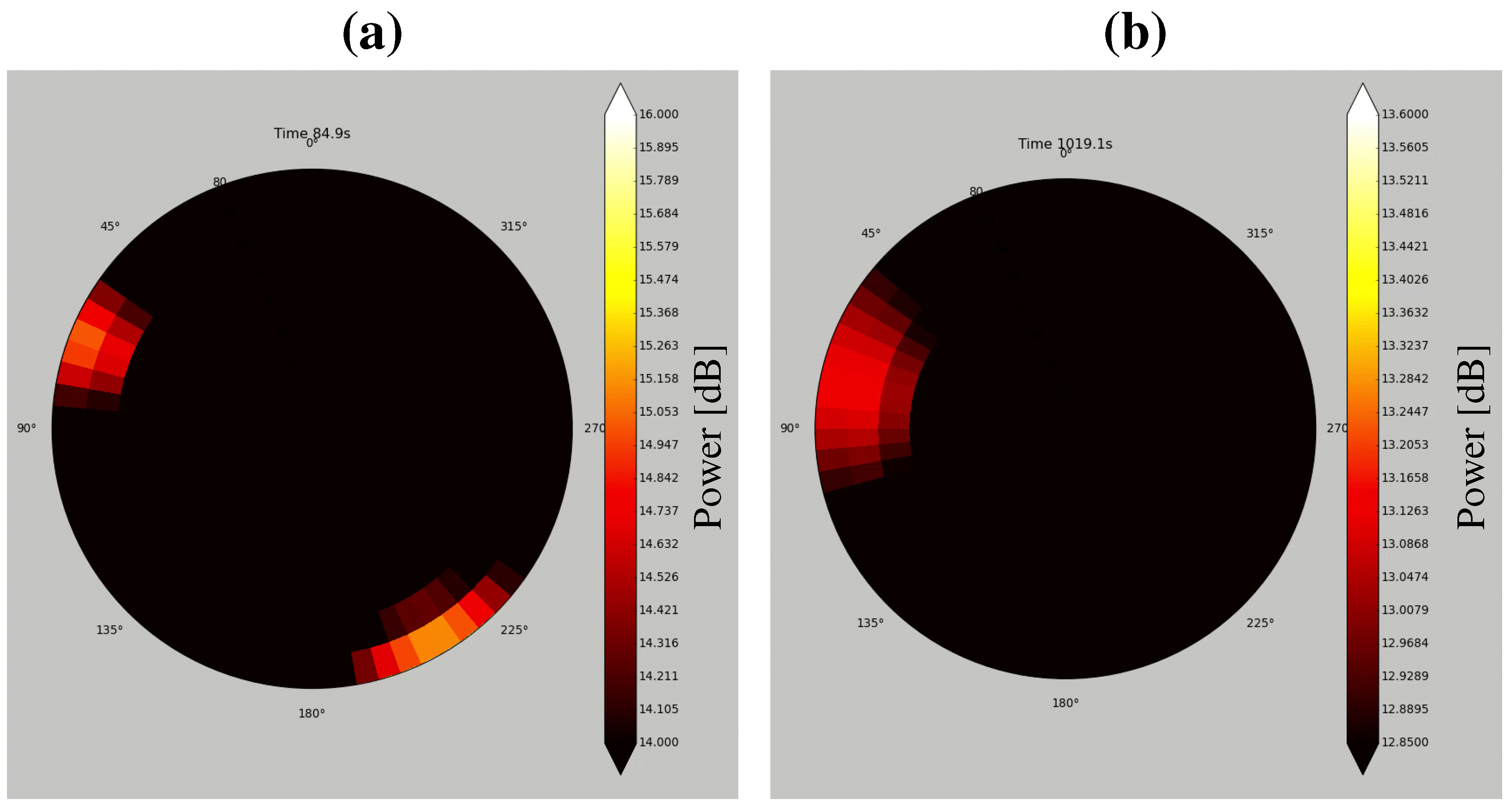
Because an operator controls the UAV with reference to its coordinates, a user friendly method would be to display sound source directions on the UAV’s coordinates. Therefore, the coordinate system shown in
Figure 7 was defined. Forward direction of the UAV is defined as the positive direction of the
y-axis, and the azimuth and elevation are projected to the circumferential and radial directions, respectively. Using this coordinate system, two visualization tools to display sound source directions were developed as shown in
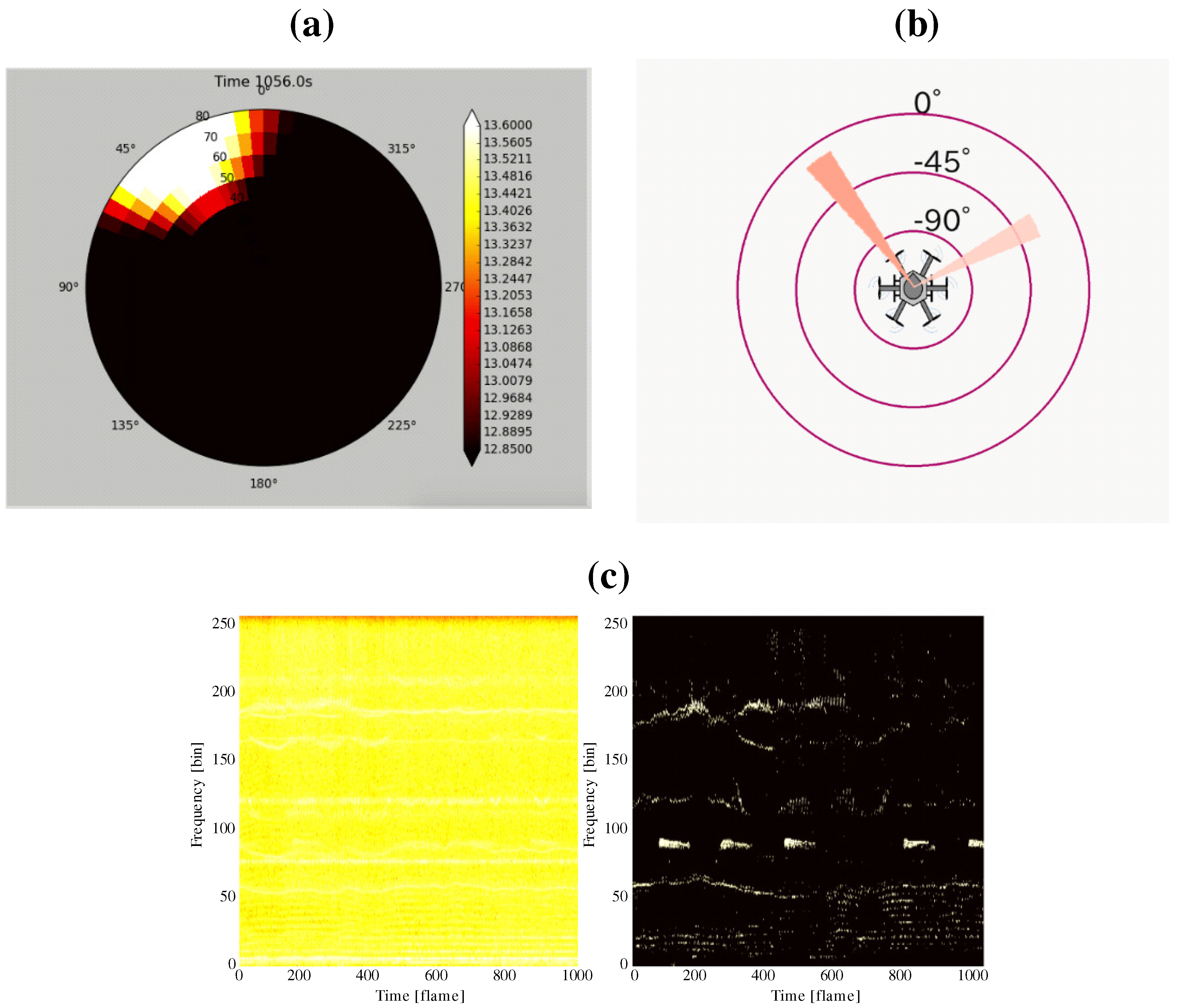
Figure 8.
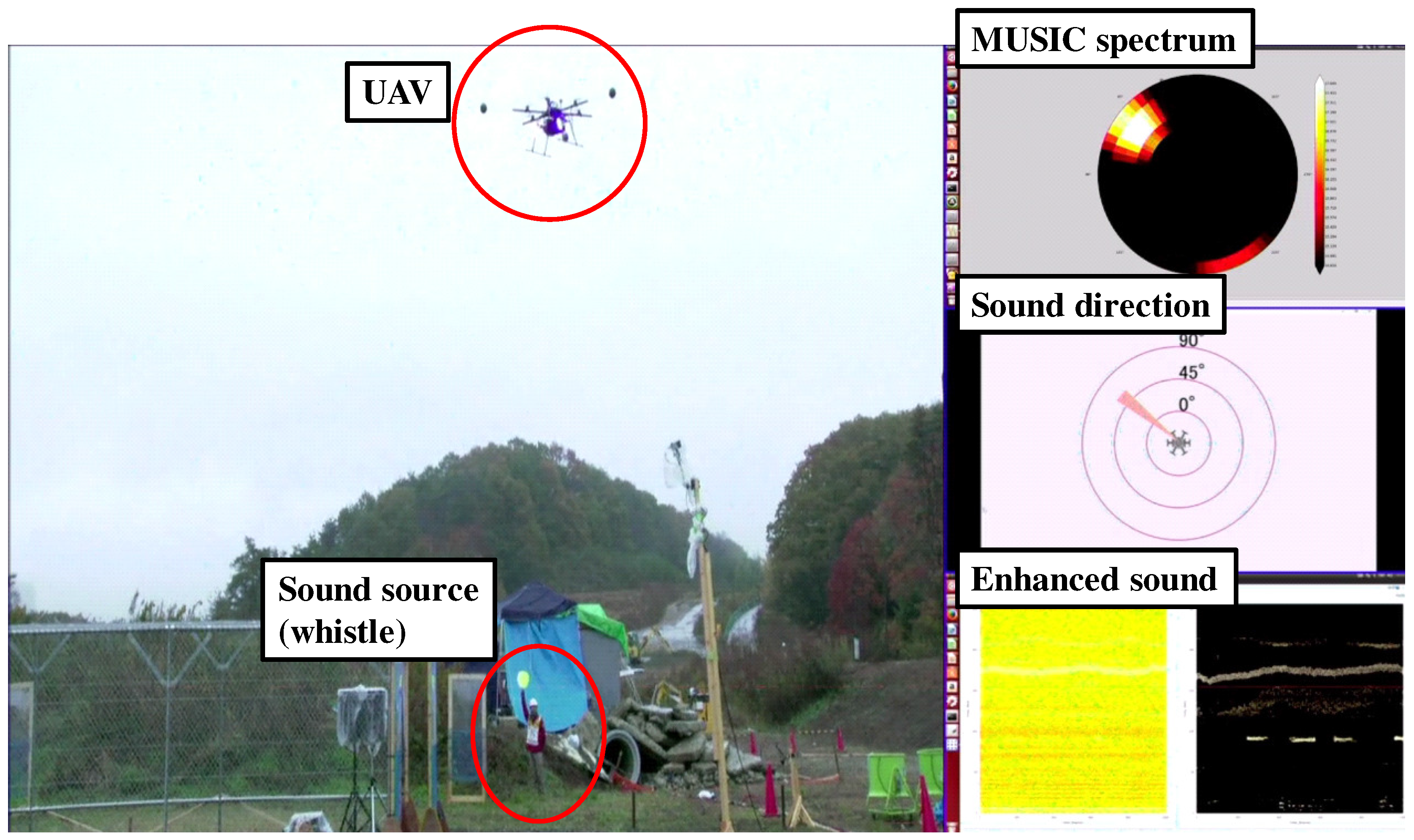
Figure 8a shows the MUSIC spectrum. The sound power in each direction is depicted by a color map.
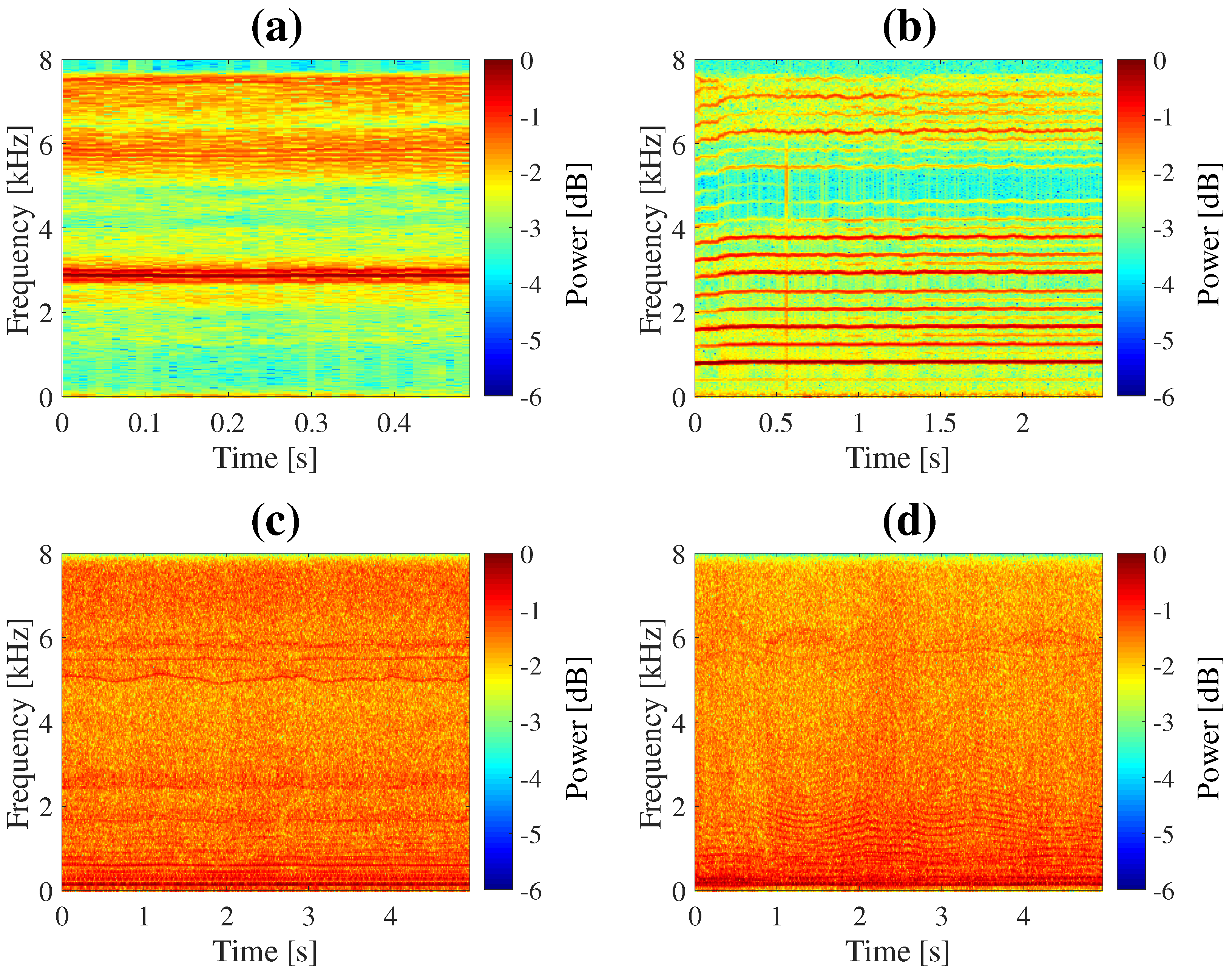
Figure 8b illustrates only the sound directions after threshold processing for the MUSIC spectrum. In addition, spectrograms of the recorded sound and after sound enhancement by online robust principal component analysis (ORPCA) [
21] are displayed as in
Figure 8c. The left panel shows a spectrogram of the recorded acoustic signal, and the right panel shows it after enhancement. The horizontal and vertical axes represent time and frequency, respectively. By viewing these three sets of data in real time, even when located far from the UAV, the operator knows the relationship between the UAV and the sound source.
2.4. Sound Source Localization Method
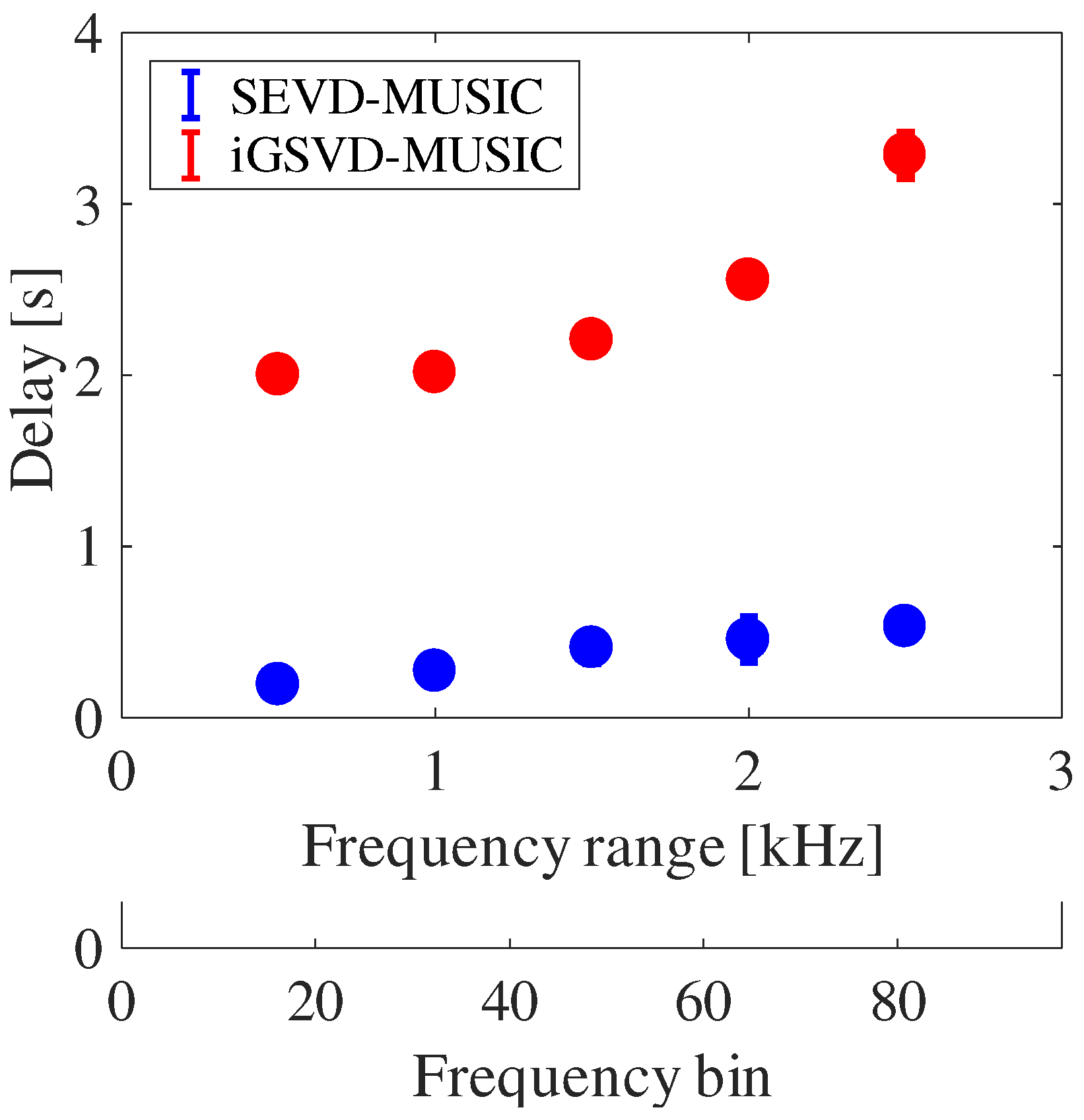
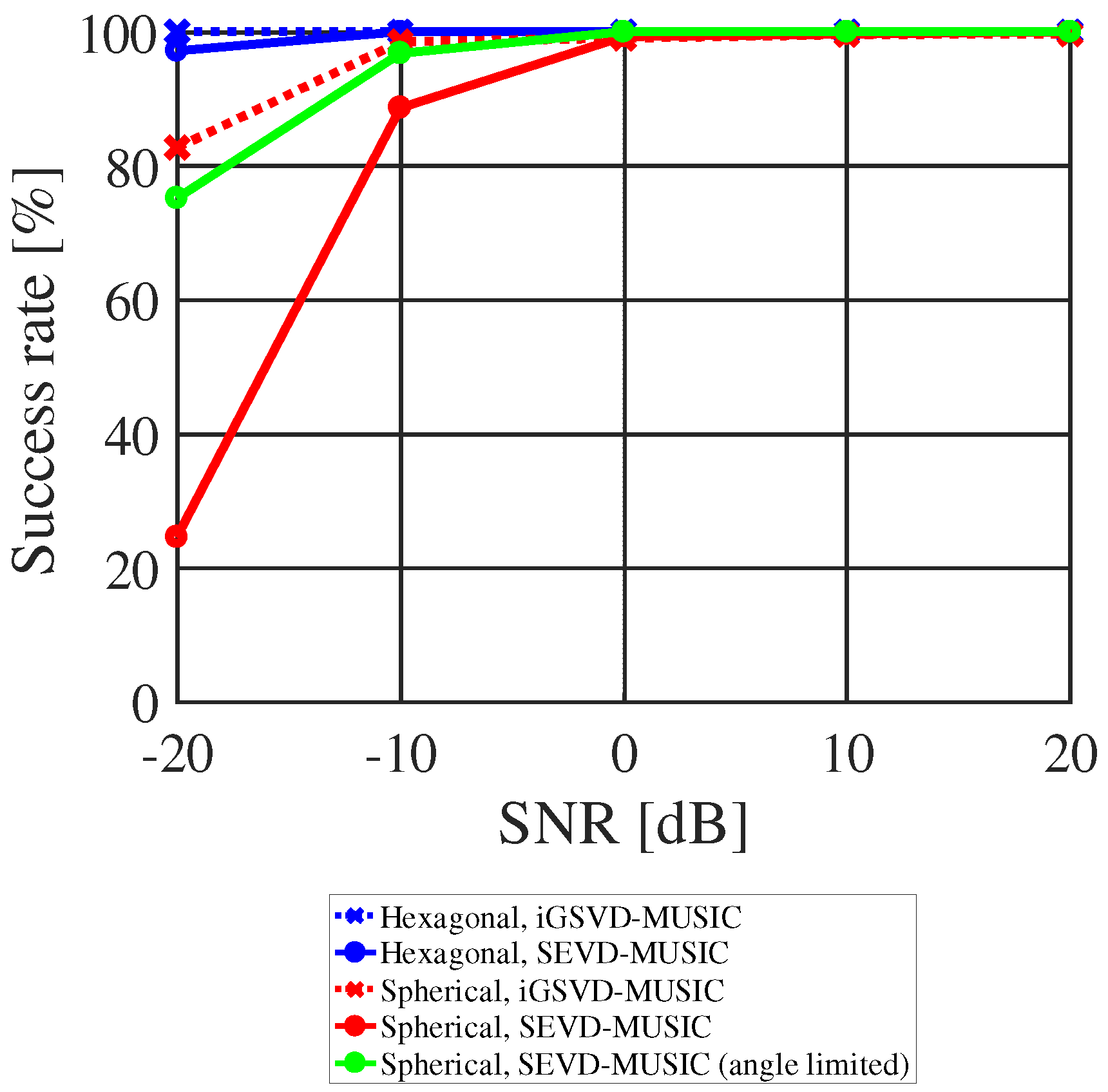
We used two methods of sound source localization, namely SEVD-MUSIC (MUSIC based on Standard Eigen Value Decomposition), which is an original broadband MUSIC method [
10], and iGSVD-MUSIC [
9]. SEVD-MUSIC has low noise robustness and low computational cost, while iGSVD-MUSIC has high noise robustness and high computational cost. Either of these can be selected according to the circumstances. Algorithms of SEVD-MUSIC and iGSVD-MUSIC are described below.
2.4.1. SEVD-MUSIC
M channel input sound signals of the
f-th frame are Fourier transformed to
, from which a correlation matrix
is defined as follows:
is the frequency bin index,
is the number of frames used for the correlation matrix calculation, and
is a complex conjugate transpose of
. The SEVD-MUSIC method calculates eigenvectors through an SEVD of the obtained
:
is a matrix with diagonal components that are eigenvalues in a descending order.
is a matrix containing eigenvectors corresponding to
. Using
, and a transfer function,
, corresponding to the sound source direction,
in the UAV coordinates, the MUSIC spatial spectrum,
, is calculated:
L is the number of target sound sources, and
is the
m-th eigenvector contained in
.
is average over
direction to estimate the direction of the sound source:
and are indices corresponding to the upper and lower limits of the used frequency bin, respectively. Threshold processing and peak detection is performed for and of the obtained peak is detected as the sound source direction.
2.4.2. iGSVD-MUSIC
In iGSVD-MUSIC, for the
f-th frame, the section of the length of
frames from the
-th frame is assumed to be a noise section, and the noise correlation matrix
is calculated:
The iGSVD-MUSIC method estimates noise in each frame and responds to dynamic change in noise. The noise component can be whitened by multiplying
to
from the left. The iGSVD-MUSIC method calculates singular vectors through the GSVD of
:
is a matrix with diagonal components of singular values in a descending order.
and
are matrices containing singular vectors corresponding to
. Then, the MUSIC space spectrum is calculated:
is the
m-th singular vector contained in
.
is averaged over
direction to estimate the direction of the sound source:
Threshold processing and peak detection is performed for and of the obtained peak is detected as the sound source direction.
Both sound source localization methods based on MUSIC basically assume an acoustic far-field. However, by using the transfer function G according to the distance to sound sources, it is possible to localize sound sources at any distance. In addition, at the altitude at which a UAV flies normally (at least a few meters), an acoustic field is a far-field. Therefore, the accuracy of sound source localization depends on a SNR of an acoustic signal rather than a distance between a microphone array to a sound source.
2.5. Structure of Microphone Array System
By integrating the above components, the microphone array system was constructed.
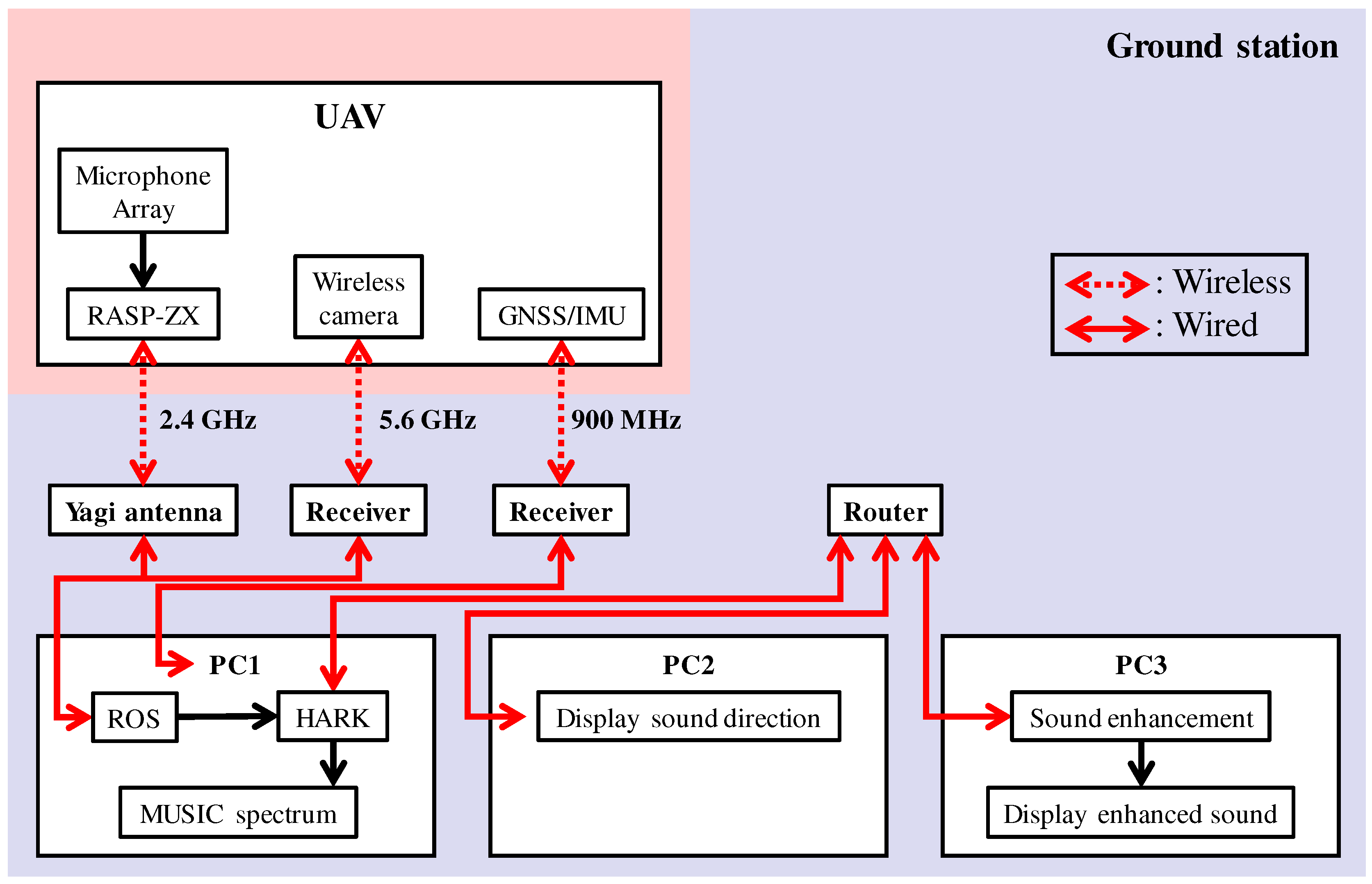
Figure 9 shows the SMAS configuration. The microphone array on the UAV was connected to a multi-channel sound signal recorder, RASP-ZX (System In Frontier (Tokyo, Japan)) [
22] for synchronous recording of 12 ch sound signals. The sound signals were recorded at a sampling frequency of 16 kHz, and a quantization bit rate of 24 bits. Recorded acoustic signals, images from the wireless camera and data from a GNSS/IMU (Global Navigation Satellite System/Inertial Measurement Unit) sensor were transmitted through a wireless network to the ground station. Different frequencies were used for the wireless communications to prevent cross talk. In the SMAS, data from a GNSS/IMU sensor and images from the wireless camera were not used; therefore, only recorded acoustic signals were received by the Yagi antenna. The received data was integrated using ROS (Robot Operating System) to provide general versatility. The acoustic signals were processed by a PC using a sound source localization method. HARK was used for the algorithm implementation. The data after processing was shared by three PCs via a router. To reduce the processing load of one computer for real-time visualization, visualization tools were displayed using three laptops. PC1, PC2 and PC3 displayed the MUSIC spectrum (
Figure 8a), sound direction (
Figure 8b) and enhanced sound (
Figure 8c), respectively. Since the SMAS is a separate system from the UAV, including its power supply, it can be applied to various UAVs.
4. Conclusions
In this paper, we developed a UAV-embedded microphone array system for an outdoor environment. First, a novel microphone array was designed to ensure water resistance and efficiency of assembly. A 12 ch microphone array, including a spherical body of simple structure, was designed. By using coated microphones and a simple structure, water resistance and efficiency of assembly were ensured. Second, the antenna and communication protocol were changed to obtain reliable wireless communication. To improve throughput, the antenna at the ground station was changed to the Yagi antenna. To avoid reducing throughput, the communication protocol was changed from TCP to UDP. Third, intuitive visualization tools for a UAV operator were developed. By integrating the above improvements, the microphone array system was constructed. Tests showed that our microphone array system for an outdoor environment that is independent from the UAV provides highly accurate sound source localization performance in real time, and has effective intuitive operator visualization tools.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}