A New Polar Transfer Alignment Algorithm with the Aid of a Star Sensor and Based on an Adaptive Unscented Kalman Filter

Abstract
:1. Introduction
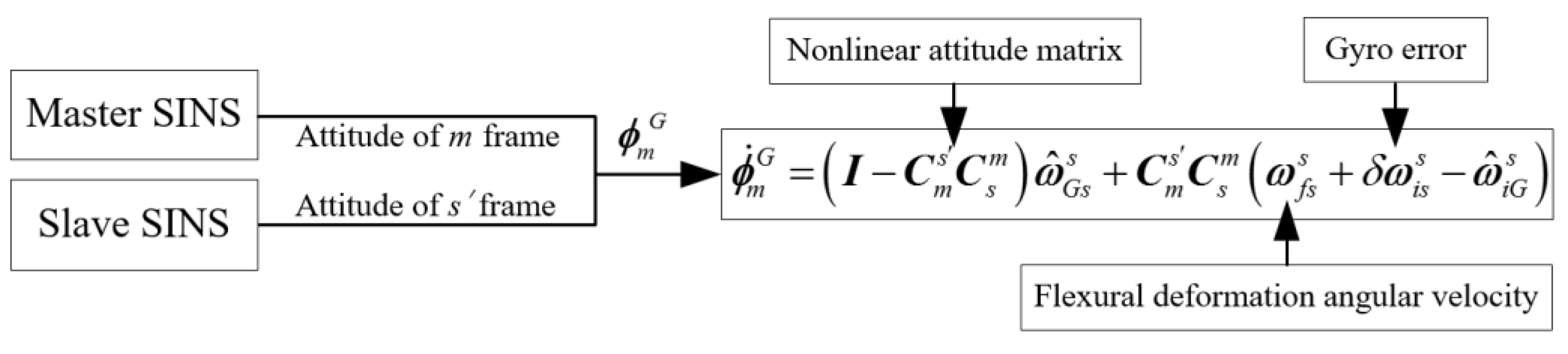
2. Polar TA Equations in the Grid Frame
- frame—body frame of master SINS;
- frame—body frame of slave SINS;
- frame—calculated body frame of slave SINS;
- frame—grid frame;
- frame—inertial frame;
- frame—geographic frame;
- frame—earth centered earth fixed frame.
2.1. State Equations
2.1.1. Velocity Error Equation
2.1.2. Attitude Error Equations
2.2. Measurement Equations
2.2.1. Modeling of the Star Sensor
2.2.2. Attitude Matching Method
3. Filter Models and Algorithm
3.1. Filter Models for Polar TA
3.2. Adatipive Unscented Kalman Filter Algorithm
- Initialization of state parameter:
- Calculation of the sigma points:and the associated weights:where and are the associated weights of mean value and covariance, respectively.
- Time Updating:
- Measurement Updating
4. Results
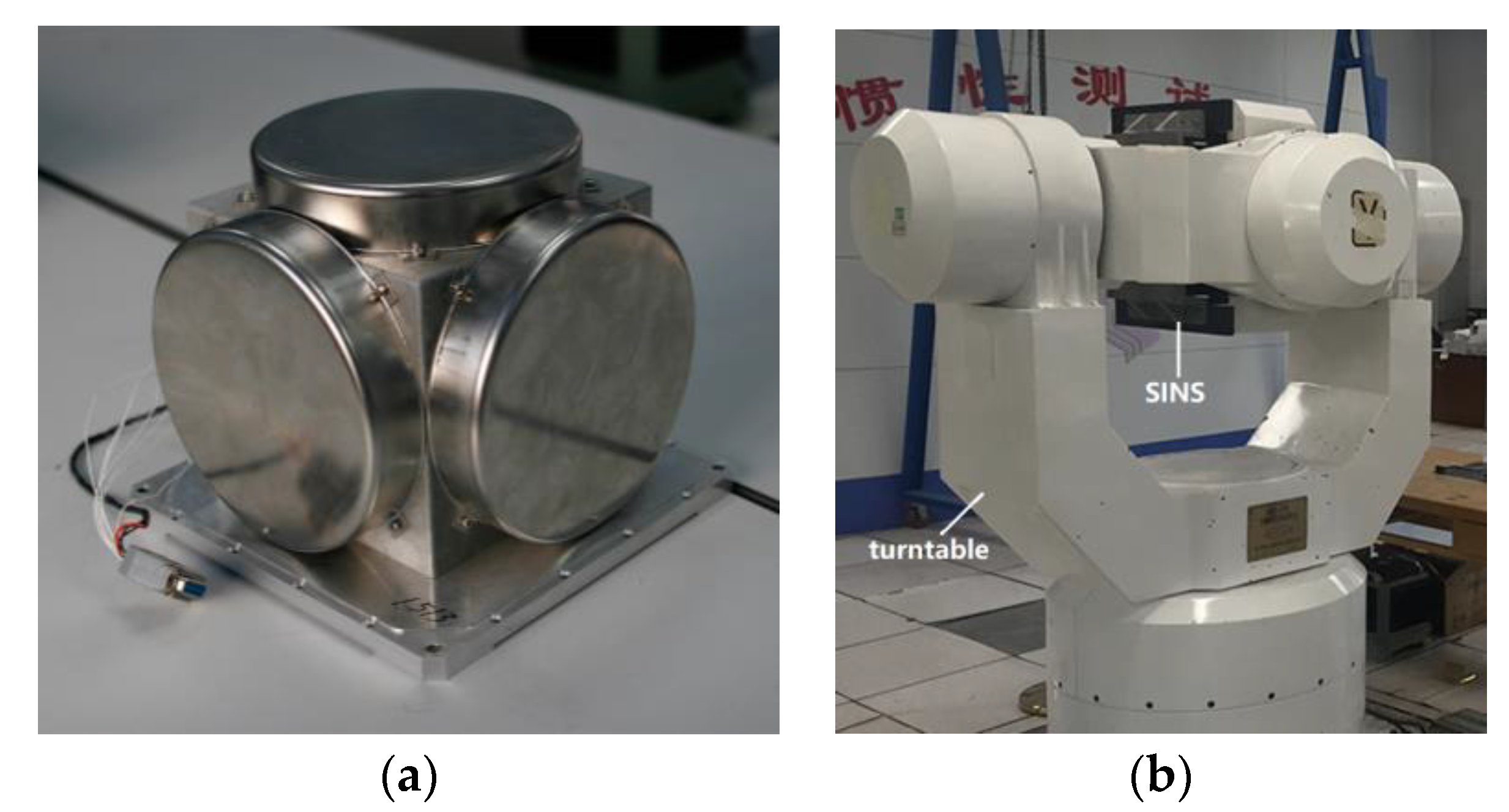
4.1. Experiment Condition
- (1)
- In this paper, attitudes of ship are set as sine functions and are set as follows: when ship sails in calm sea state, the amplitude/period of pitch angle, roll angle and yaw angle are s, s and s, respectively; when ship sails in medium sea state, the amplitude/period of pitch angle, roll angle and yaw angle are s, s and s, respectively; the initial phase and heading are and , respectively. units not in italics and with a space after number
- (2)
- Maneuvers of ship are set as follows: the initial latitude is and initial longitude is ; when ship is in uniform linear motion, the velocity of ship is set as 10 nm/h; when ship is in linear motion with constant acceleration, the initial velocity of ship is set as 10 nm/h and the acceleration of ship is set as 0.1 m/s2.
- (3)
- Drifts of IMU extracted from practical measured data are as follows: the three-axis gyro constant drifts are rad/s, rad/s and rad/s, respectively; the three-axis accelerometer constant drifts are m/s2, m/s2 and m/s2, respectively; the three-axis gyro random drifts variances are , and , respectively; the three-axis accelerometer random drifts variances are , and , respectively.
- (4)
- In the case of a large azimuth misalignment angle, the true values of actual physical misalignment angles are set as , and , respectively. The lengths of three-axis lever-arm are , and , respectively. The constant installation error of star sensor are set as , and , respectively; the random installation error of star sensor are set as , and , respectively. Simulation time is and filter frequency is . In the condition that the master SINS is not accurate, the initial attitude errors of master SINS are set as , and , respectively.
- (5)
- The initial state estimation covariance matrix , system process noise covariance matrix , and measurement noise covariance matrix are set as follows:
- (6)
- The initializations of the filter state vector are set as follows:
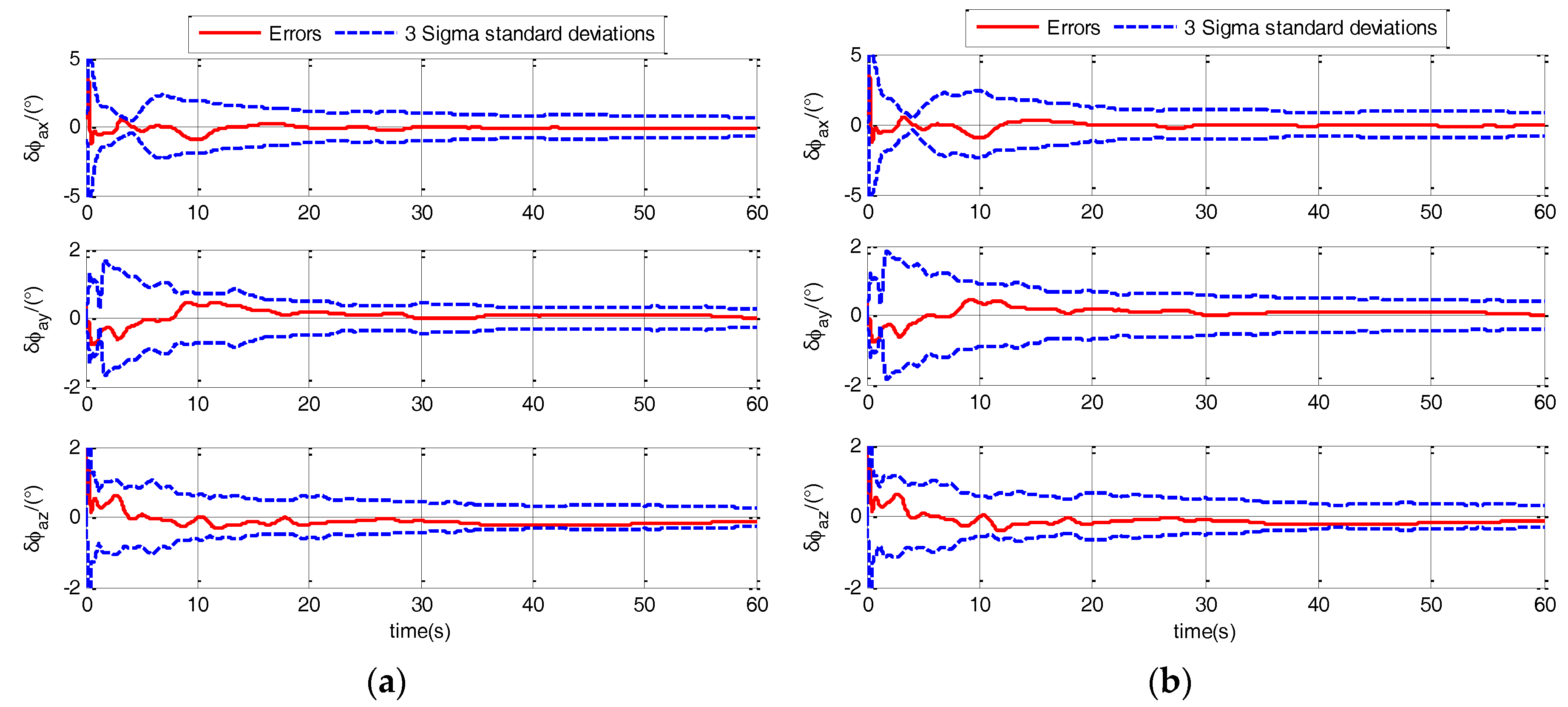
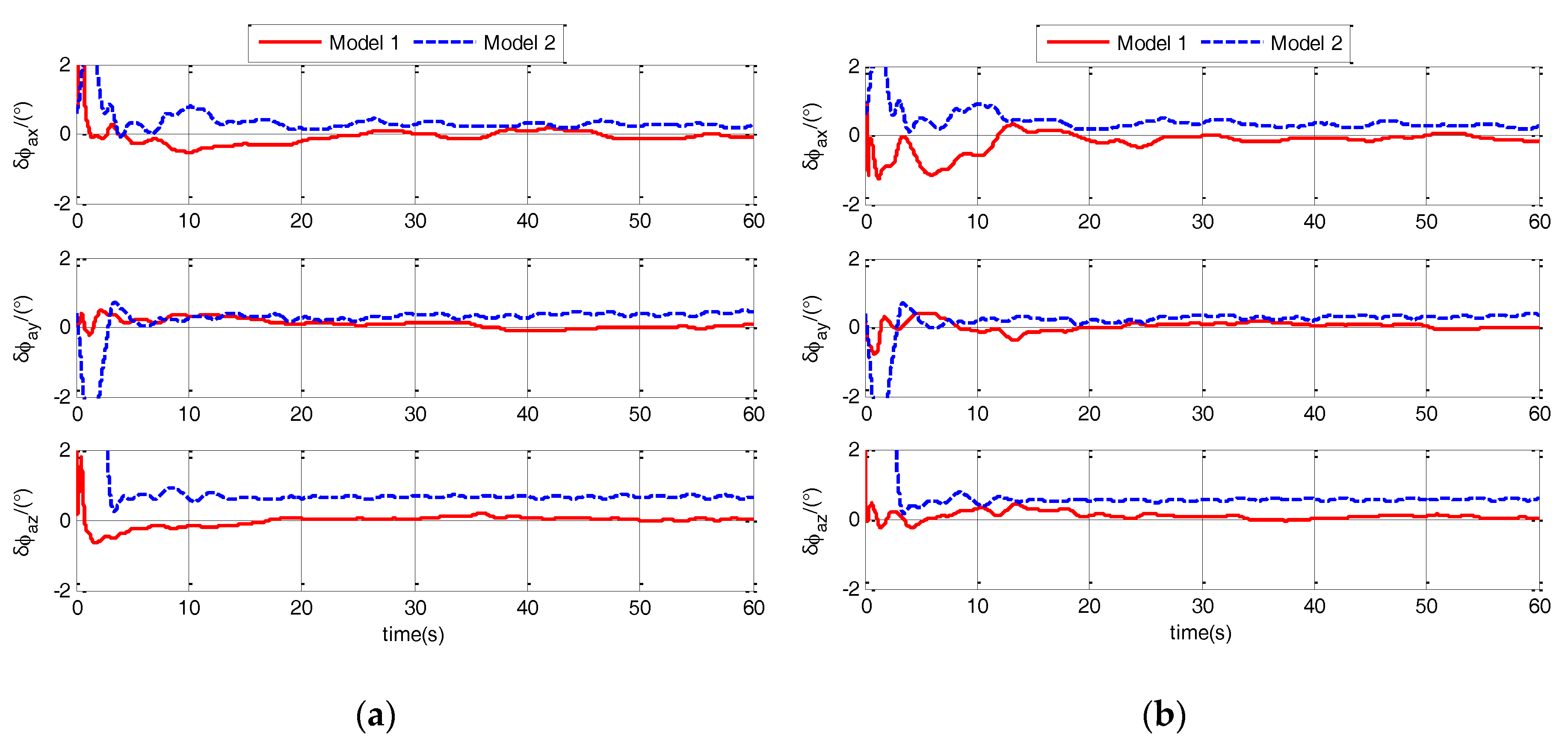
4.2. Results and Analyses
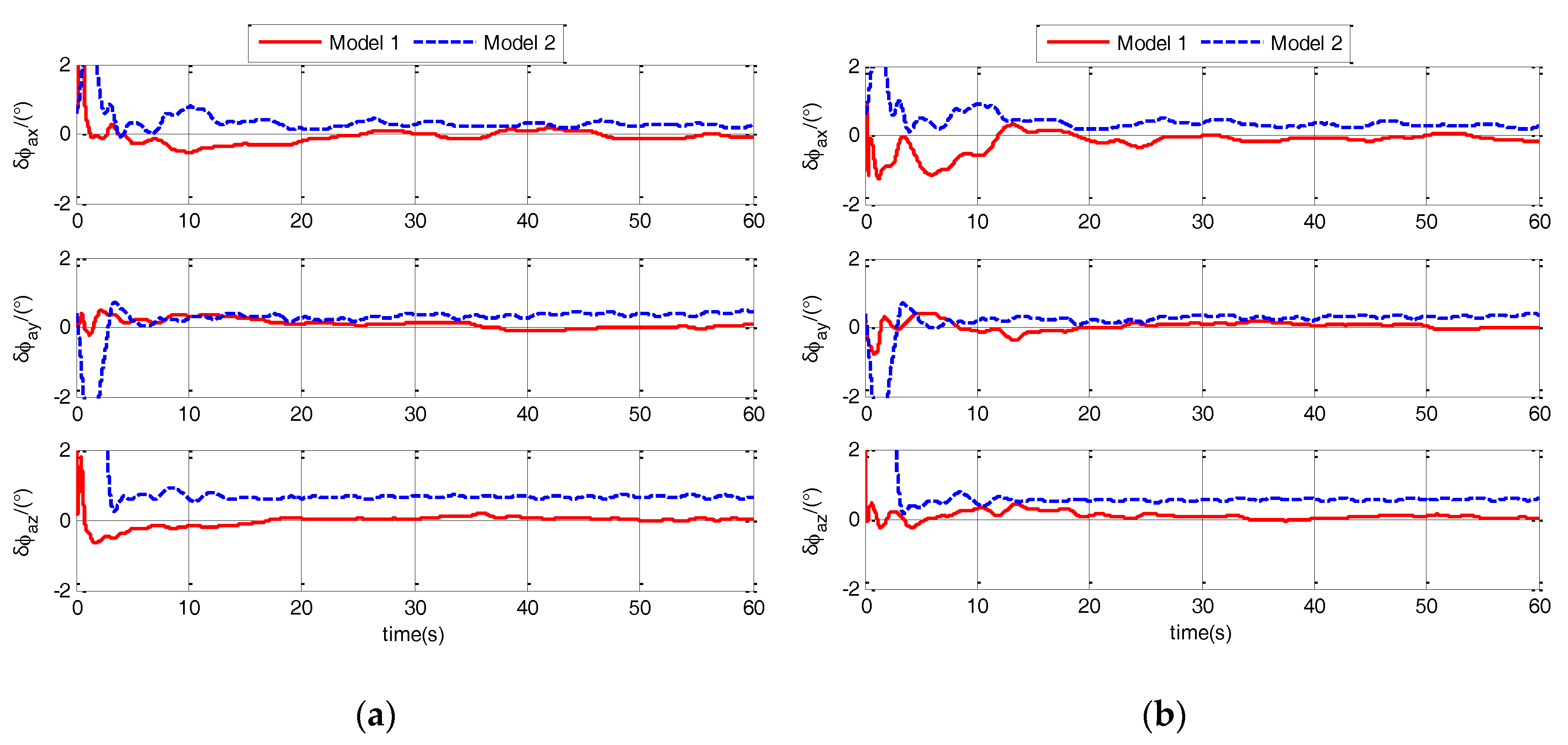
4.2.1. Verification for the Superiority of Designed TA Model
- (1)
- : when ship is in calm sea state, the static and ULM errors of Model 1 are decreased to 42.0% and 42.6%, respectively; when ship is in medium sea state, the ULM and LMAC errors of Model 1 are decreased to 38.4% and 36.6%, respectively.
- (2)
- : when ship is in calm sea state, the static and ULM errors of Model 1 are decreased to 29.8% and 22.4%, respectively; when ship is in medium sea state, the ULM and LMAC errors of Model 1 are decreased to 20.1% and 28.2%, respectively.
- (3)
- : when ship is in calm sea state, the static and ULM errors of Model 1 are decreased to 30.23% and 31.97%, respectively; when ship is in medium sea state, the ULM and LMAC errors of Model 1 are decreased to 10.8% and 11.7%, respectively.
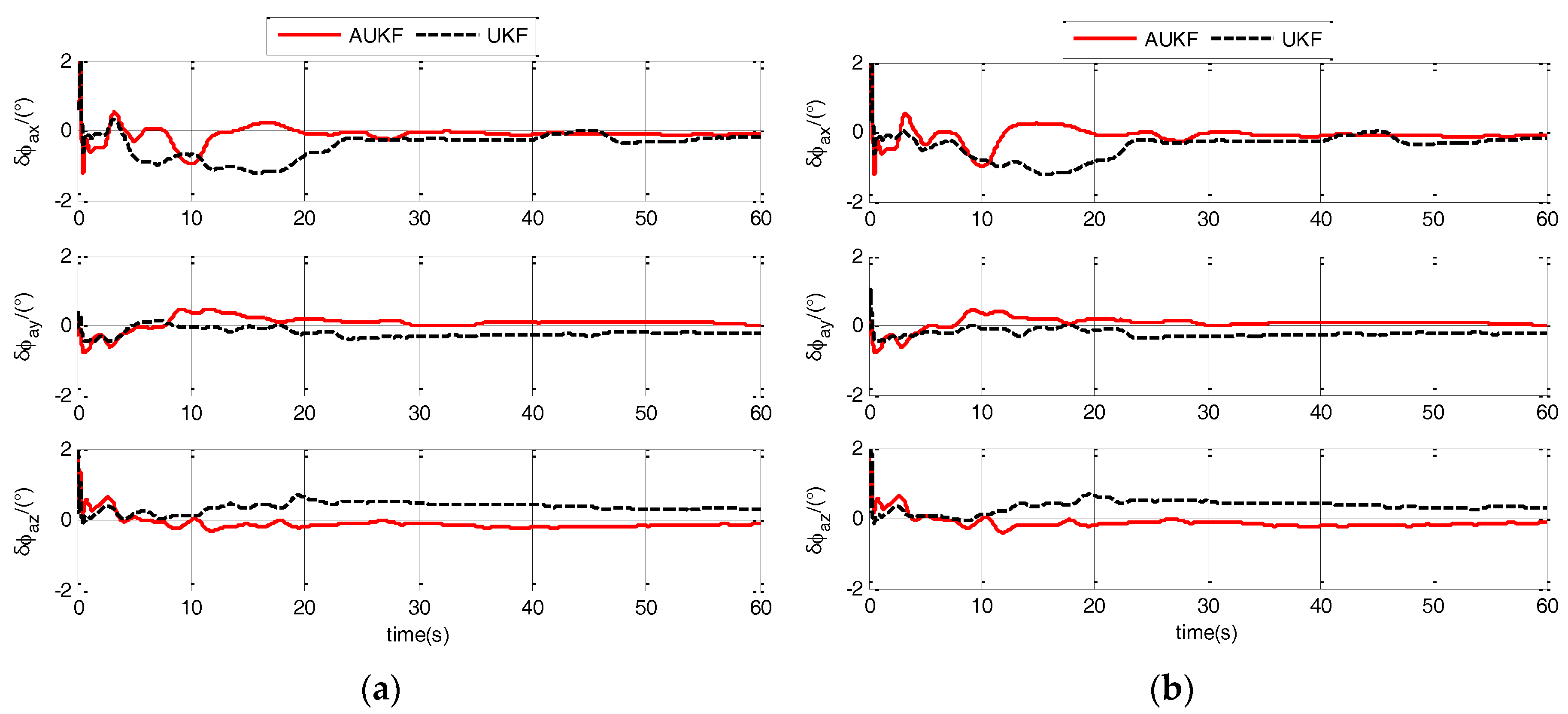
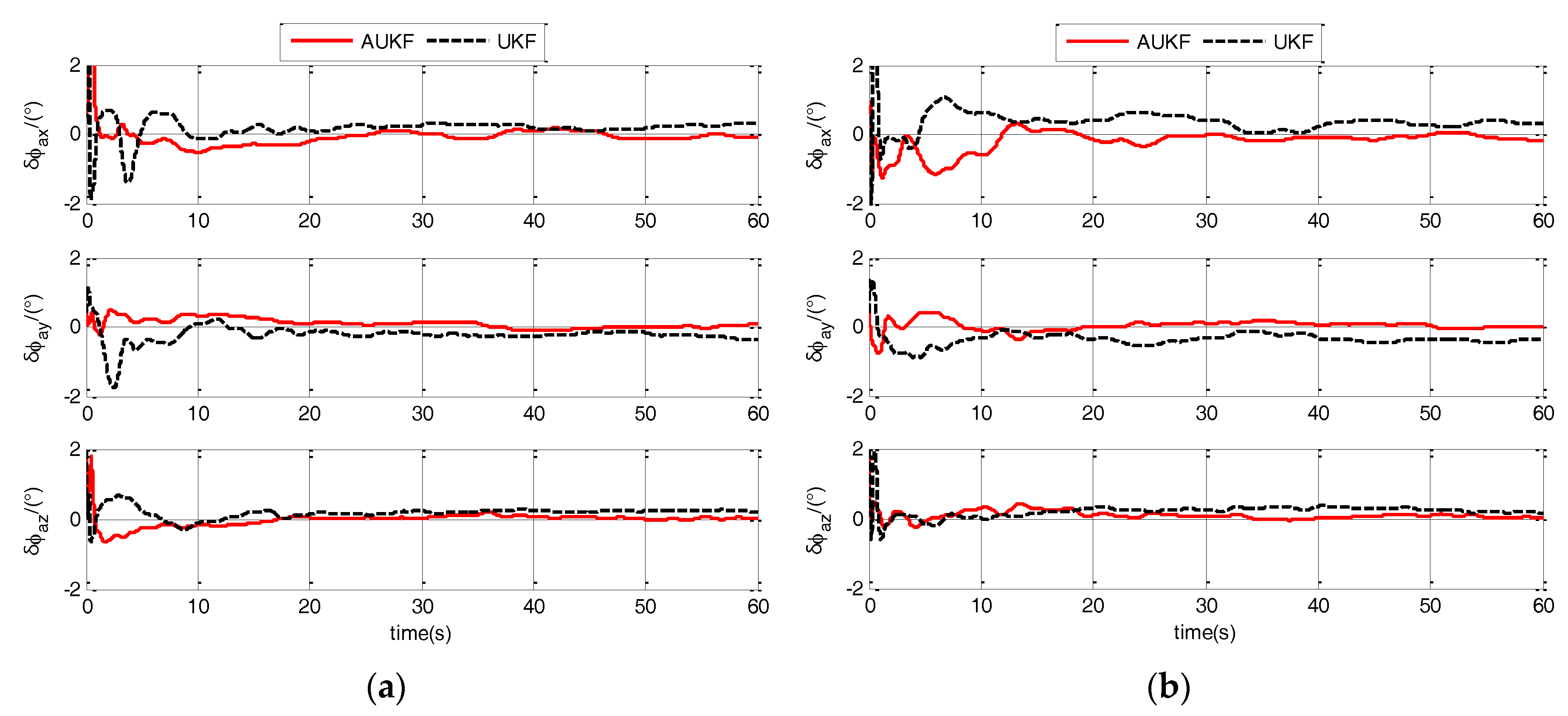
4.2.2. Verification for the Performance of AUKF
- (1)
- : when ship is in calm sea state, the static and ULM errors of Model 1 are decreased to 37.5% and 37.1%, respectively; when ship is in medium sea state, the ULM and LMAC errors of Model 1 are decreased to 44.3% and 37.2%, respectively.
- (2)
- : when ship is in calm sea state, the static and ULM errors of Model 1 are decreased to 28.7% and 28.9%, respectively; when ship is in medium sea state, the ULM and LMAC errors of Model 1 are decreased to 31.5% and 24.9%, respectively.
- (3)
- : when ship is in calm sea state, the static and ULM errors of Model 1 are decreased to 50.9% and 51.2%, respectively; when ship is in medium sea state, the ULM and LMAC errors of Model 1 are decreased to 31.3% and 24.3%, respectively.
5. Discussion
- (1)
- In the condition that the master SINS has low accuracy, the measurement information would be inaccurate. In Model 2, the measurement and become inaccurate due to the low accurate master SINS, so the alignment accuracy of Model 2 is decreased. Because the star sensor can keep a high attitude accuracy in the polar region, the misalignment angle between frame and frame is more accurate than . By choosing attitude matching method and using as the measurement, measurement information of Model 1 can keep accurate. Meanwhile, due to the estimate of , the value of can be constant corrected. Thus, Model 1 can achieve a high alignment accuracy with the aid of star sensor.
- (2)
- Model 2 does not consider and compensate the lever arm effect, which exists in the practical application of TA. By estimating and compensating the lever-arm , Model 1 can reduce and eliminate the influence caused by lever-arm. Therefore, Model 1 has more effectiveness in promoting the accuracy of TA.
- (3)
- Since the harsh environment of the polar region, the information of system model is abnormal. With the proper value of adaptive factor, AUKF can balance the prediction and measurement information and adaptively adjust the state information. Thus, the proposed algorithm based on AUKF can and perform better than the state-of-the-art algorithm based on UKF in adjusting the harsh polar environment and improving the estimating accuracy.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gao, Y.B.; Liu, M.; Li, G.C.; Guang, X.X. Initial Alignment for SINS Based on Pseudo-Earth Frame in Polar Regions. Sensors 2017, 17, 1416. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.P.; Wang, L.; Zhang, W.; Zhou, J.J.; Wang, M. Polar Grid Navigation Algorithm for Unmanned Underwater Vehicles. Sensors 2017, 17, 1599. [Google Scholar] [CrossRef]
- Zhang, Q.; Niu, X.J.; Zhang, H.P.; Shi, C. Using Allan variance to evaluate the relative accuracy on different time scales of GNSS/INS systems. Meas. Sci. Technol. 2013, 24, 085006. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; IET Inc.: Chicago, IL, USA, 2004. [Google Scholar]
- Kain, J.E.; Cloutier, J.R. Rapid Transfer Alignment for Tactical Weapon Applications. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Boston, MA, USA, 1989; pp. 1290–1300. [Google Scholar]
- Ren, C.H.; Pan, Y.J.; He, T.; Xiong, N.X. Research and implementation of a new orientation & incline instrument used in oil and gas wells. In Proceedings of the International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 1027–1030. [Google Scholar]
- Huang, W.Q.; Fang, T.; Luo, L.; Zhao, L.; Che, F.Z. A Damping Grid Strapdown Inertial Navigation System Based on a Kalman Filter for Ships in Polar Regions. Sensors 2017, 17, 1551. [Google Scholar] [CrossRef] [PubMed]
- Bekir, E. Introduction to Modern Navigation Systems; World Scientific: Hackensack, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Zhou, Q.; Qin, Y.Y.; Fu, Q.W.; Yue, Y.Z. Grid Mechanization in Inertial Navigation Systems for Transpolar Aircraft. J. Northwest. Polytech. Univ. 2013, 31, 210–217. (In Chinese) [Google Scholar]
- Wu, F.; Qin, Y.Y.; Zhou, Q. Airborne weapon transfer alignment algorithm in polar regions. J. Chin. Inert. Technol. 2013, 21, 141–146. (In Chinese) [Google Scholar]
- Cheng, J.H.; Wang, T.D.; Guan, D.X.; Li, M.L. Polar transfer alignment of shipborne SINS with a large misalignment angle. Meas. Sci. Technol. 2016, 27, 035101. [Google Scholar] [CrossRef]
- Cheng, J.H.; Wang, T.D.; Dong, N.N.; Kang, Y.Y.; Jiang, G.A. On Lever-Arm Effect Compensation for Polar Transfer Alignment. In Proceedings of the Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 5569–5574. [Google Scholar]
- Chu, H.R.; Sun, T.T.; Zhang, B.Q.; Zhang, H.W.; Chen, Y. Rapid Transfer Alignment of MEMS SINS Based on Adaptive Incremental Kalman Filter. Sensors 2017, 17, 152. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.L.; Zhang, Y.G.; Wu, Z.M.; Li, N.; Chambers, J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Control 2017, PP, 1. [Google Scholar] [CrossRef]
- Liu, R.; Yuen, C.; Do, T.N.; Jiao, D.W.; Liu, X.; Tan, U.X. Cooperative relative positioning of mobile users by fusing IMU inertial and UWB ranging information. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5623–5629. [Google Scholar]
- Yahaya, M.H.; Kamarudin, M.N. Analysis of GPS visibility and satellite-receiver geometry over different latitudinal region. In Proceedings of the International Symposium on Geoinformation, Kuala Lumpur, Malaysia, 13–15 October 2008; pp. 1–8. [Google Scholar]
- Wang, Q.Y.; Diao, M.; Gao, W.; Zhu, M.H.; Xiao, S. Integrated navigation method of a marine strapdown inertial navigation system using a star sensor. Meas. Sci. Technol. 2015, 26, 115101. [Google Scholar] [CrossRef]
- Wang, X.L.; Guan, X.J.; Fang, J.C.; Li, H.N. A high accuracy multiplex two-position alignment method based on SINS with the aid of star sensor. Aerosp. Sci. Technol. 2015, 42, 66–73. [Google Scholar] [CrossRef]
- Li, J.; Wei, X.G.; Zhang, G.J. An Extended Kalman Filter-Based Attitude Tracking Algorithm for Star Sensors. Sensors 2017, 17, 1921. [Google Scholar] [CrossRef]
- Wang, Q.Y.; Li, Y.B.; Diao, M.; Gao, W.; Yu, F. Coarse alignment of a shipborne strapdown inertial navigation system using star sensor. IET Sci. Meas. Technol. 2015, 9, 852–860. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Model | Calm Sea State | Medium Sea State | ||
|---|---|---|---|---|---|
| Static | ULM | ULM | LMAC | ||
| /(°) | Model 1 | 0.0894 | 0.0920 | 0.1027 | 0.1122 |
| Model 2 | 0.2128 | 0.2159 | 0.2673 | 0.3066 | |
| /(°) | Model 1 | 0.0721 | 0.0723 | 0.0753 | 0.0876 |
| Model 2 | 0.2418 | 0.3233 | 0.3746 | 0.3102 | |
| /(°) | Model 1 | 0.1853 | 0.1865 | 0.0717 | 0.0659 |
| Model 2 | 0.6129 | 0.5834 | 0.6654 | 0.5638 | |
| Parameters | Filter | Calm Sea State | Medium Sea State | ||
|---|---|---|---|---|---|
| Static | ULM | ULM | LMAC | ||
| /(°) | AUKF | 0.0894 | 0.0920 | 0.1027 | 0.1122 |
| UKF | 0.2384 | 0.2477 | 0.2318 | 0.3015 | |
| /(°) | AUKF | 0.0721 | 0.0723 | 0.0753 | 0.0876 |
| UKF | 0.2515 | 0.2505 | 0.2394 | 0.3513 | |
| /(°) | AUKF | 0.1853 | 0.1865 | 0.0717 | 0.0659 |
| UKF | 0.3639 | 0.3641 | 0.2292 | 0.2709 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, J.; Wang, T.; Wang, L.; Wang, Z. A New Polar Transfer Alignment Algorithm with the Aid of a Star Sensor and Based on an Adaptive Unscented Kalman Filter. Sensors 2017, 17, 2417. https://doi.org/10.3390/s17102417
Cheng J, Wang T, Wang L, Wang Z. A New Polar Transfer Alignment Algorithm with the Aid of a Star Sensor and Based on an Adaptive Unscented Kalman Filter. Sensors. 2017; 17(10):2417. https://doi.org/10.3390/s17102417
Chicago/Turabian StyleCheng, Jianhua, Tongda Wang, Lu Wang, and Zhenmin Wang. 2017. "A New Polar Transfer Alignment Algorithm with the Aid of a Star Sensor and Based on an Adaptive Unscented Kalman Filter" Sensors 17, no. 10: 2417. https://doi.org/10.3390/s17102417
APA StyleCheng, J., Wang, T., Wang, L., & Wang, Z. (2017). A New Polar Transfer Alignment Algorithm with the Aid of a Star Sensor and Based on an Adaptive Unscented Kalman Filter. Sensors, 17(10), 2417. https://doi.org/10.3390/s17102417