
Multiple Drosophila Tracking System with Heading Direction


Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
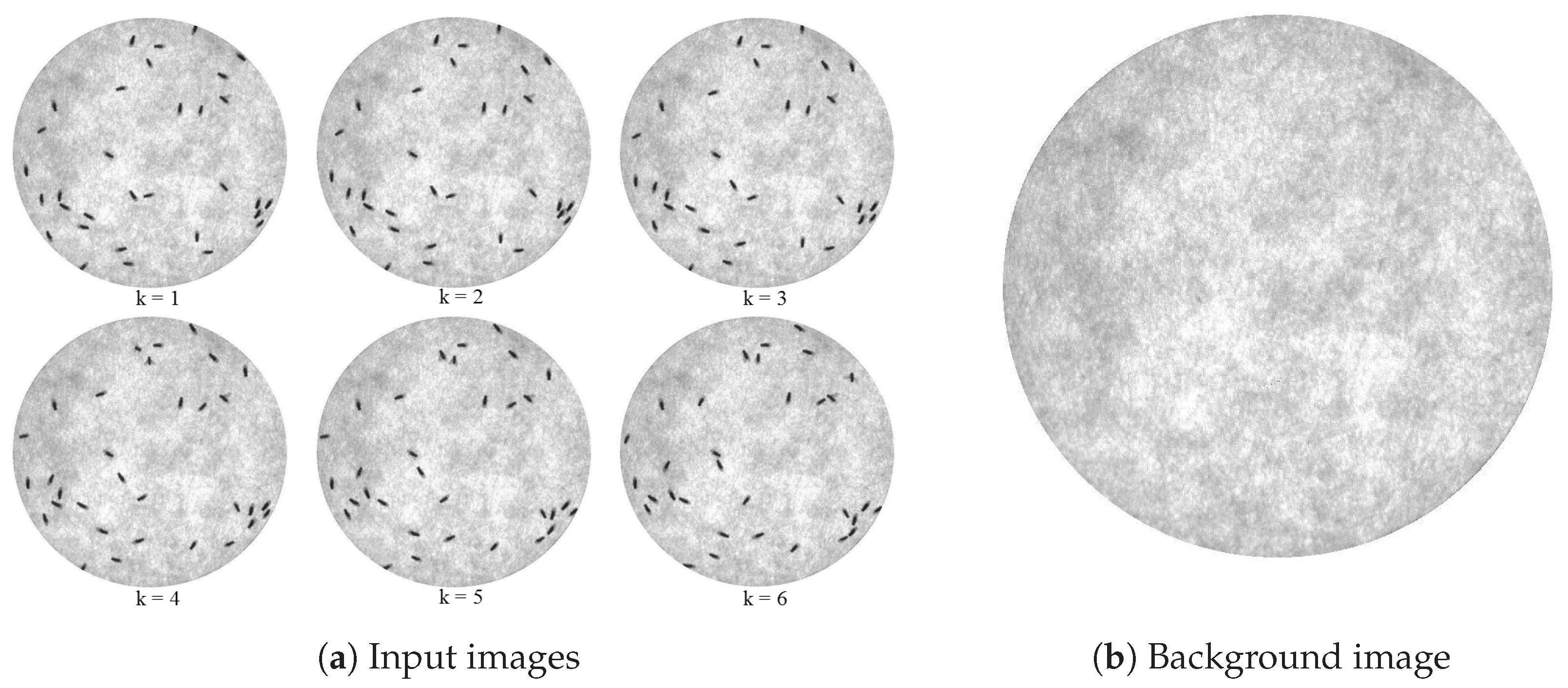
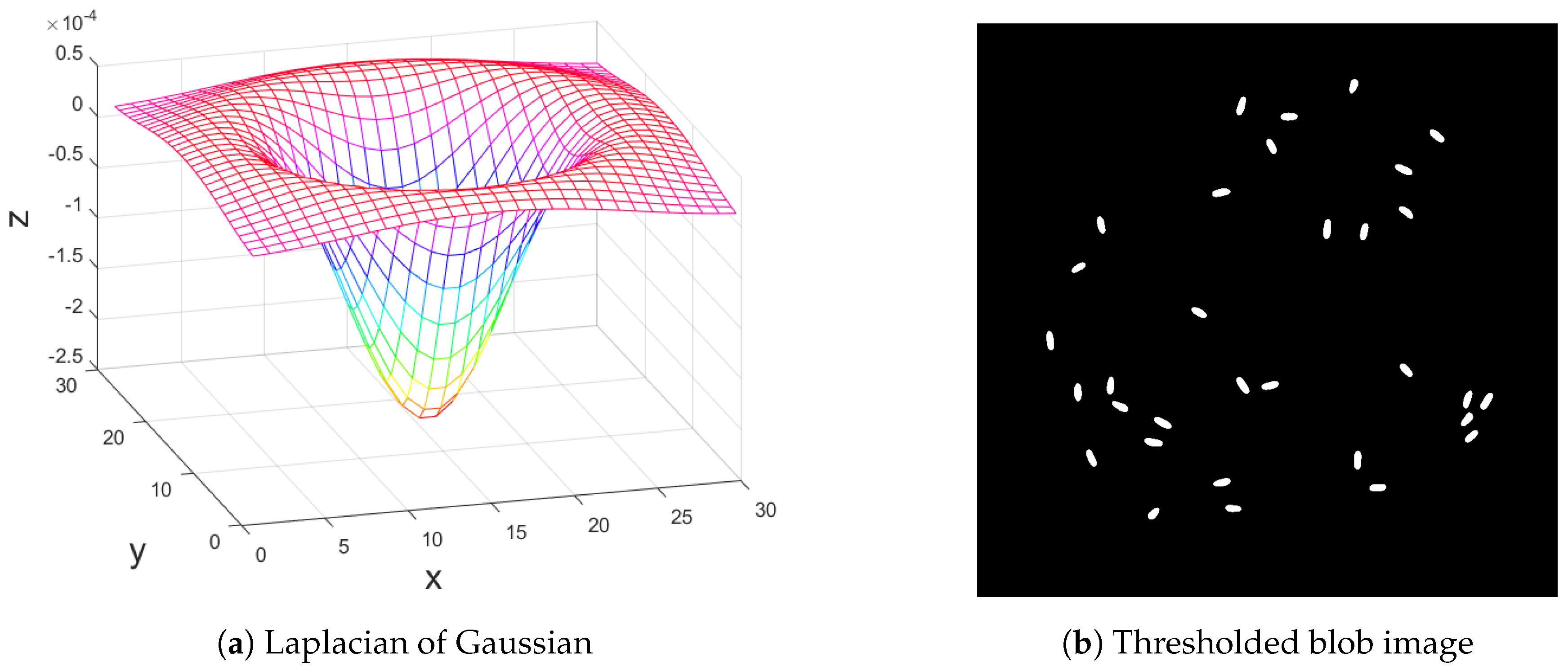
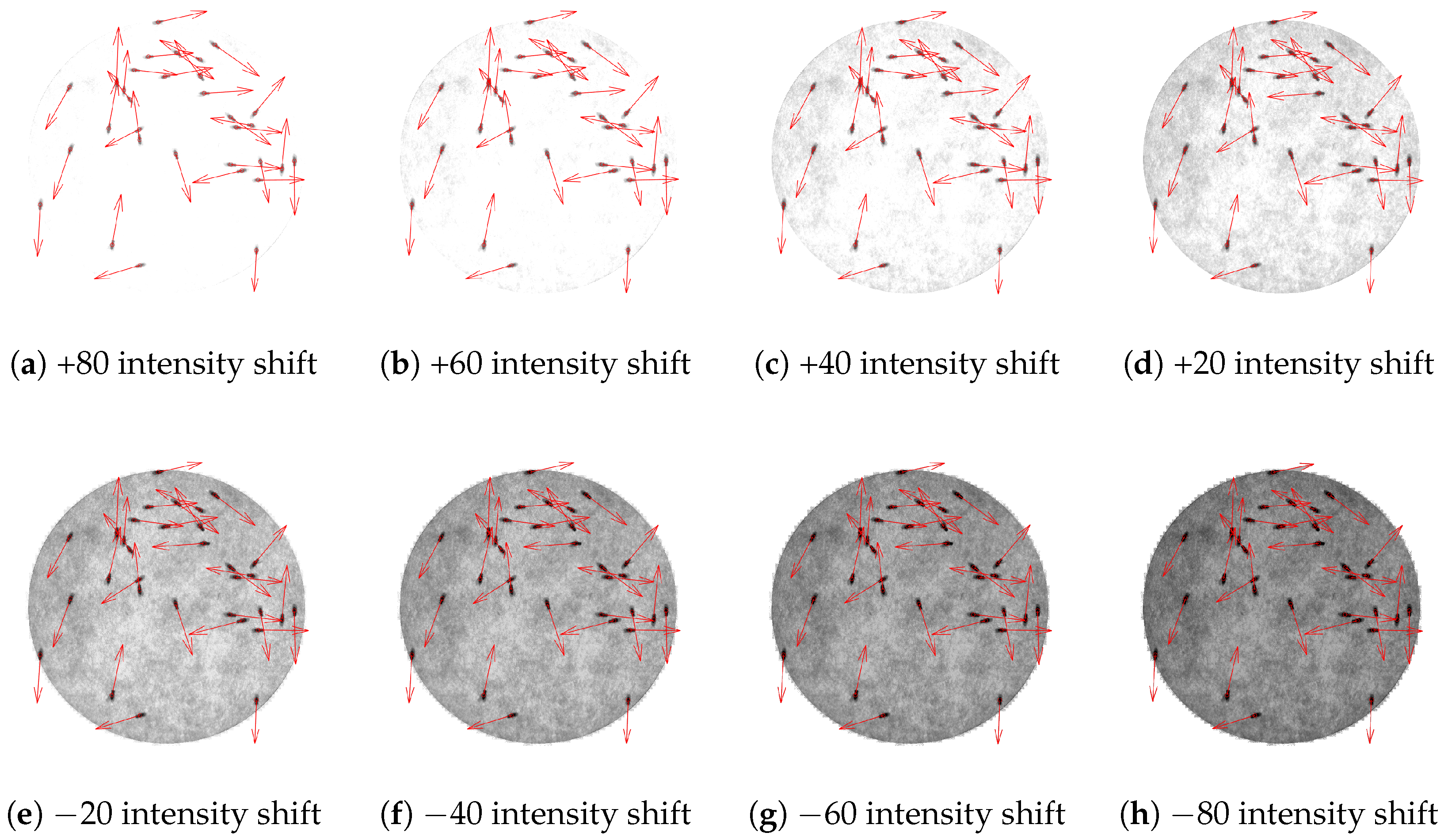
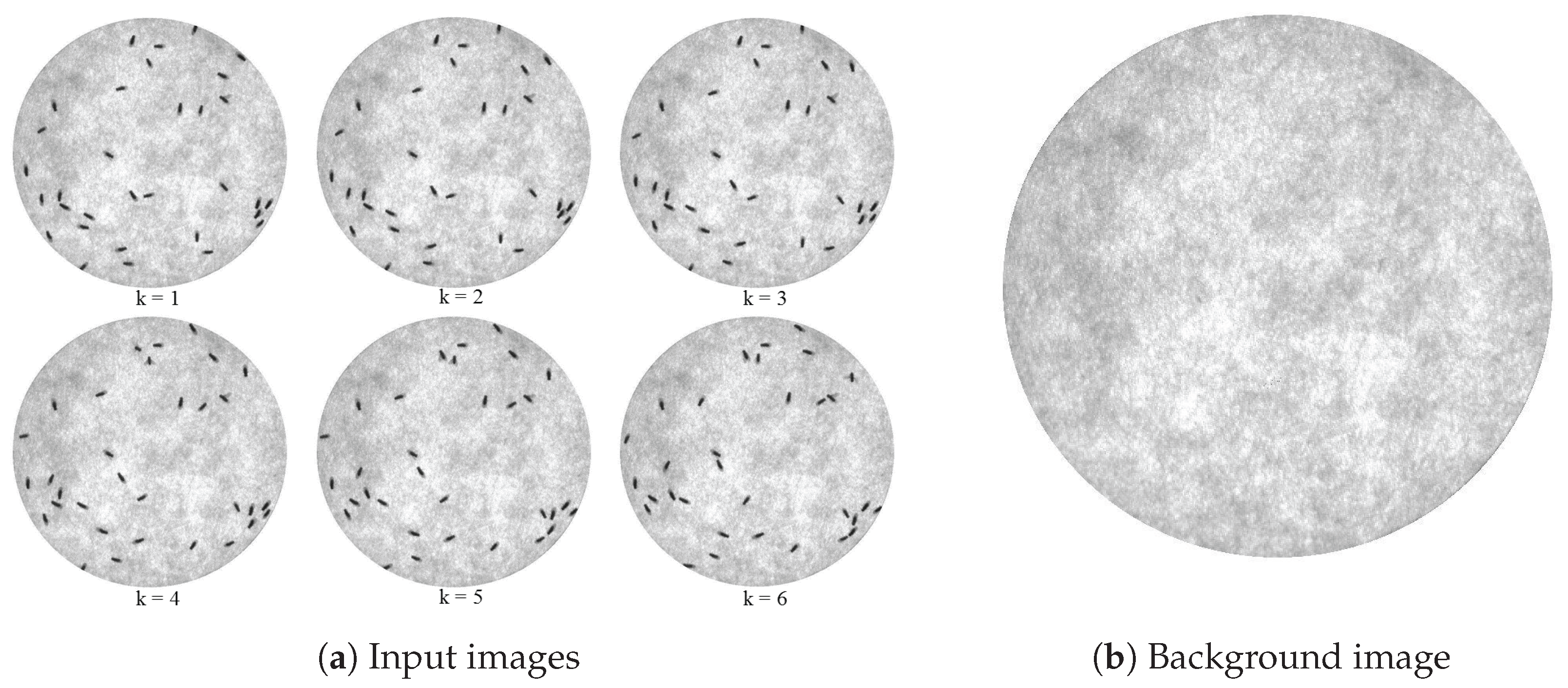
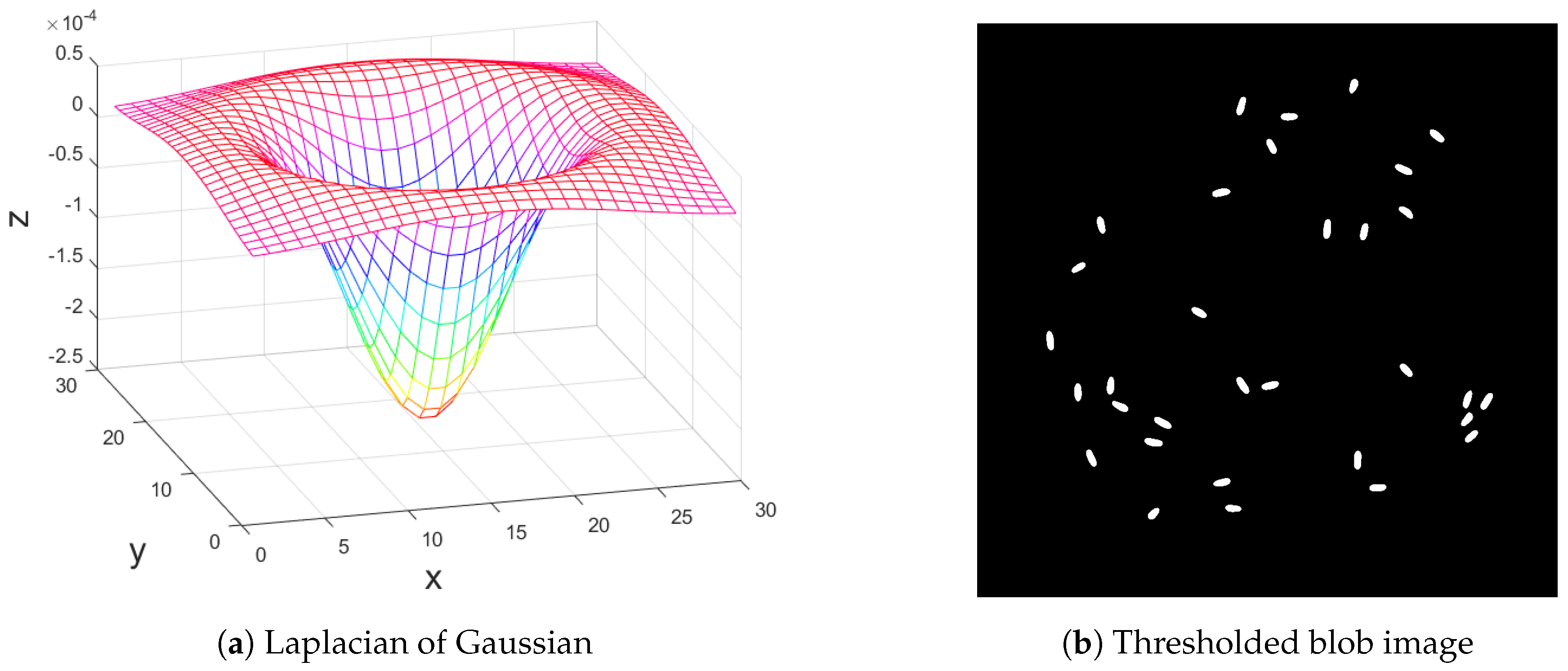
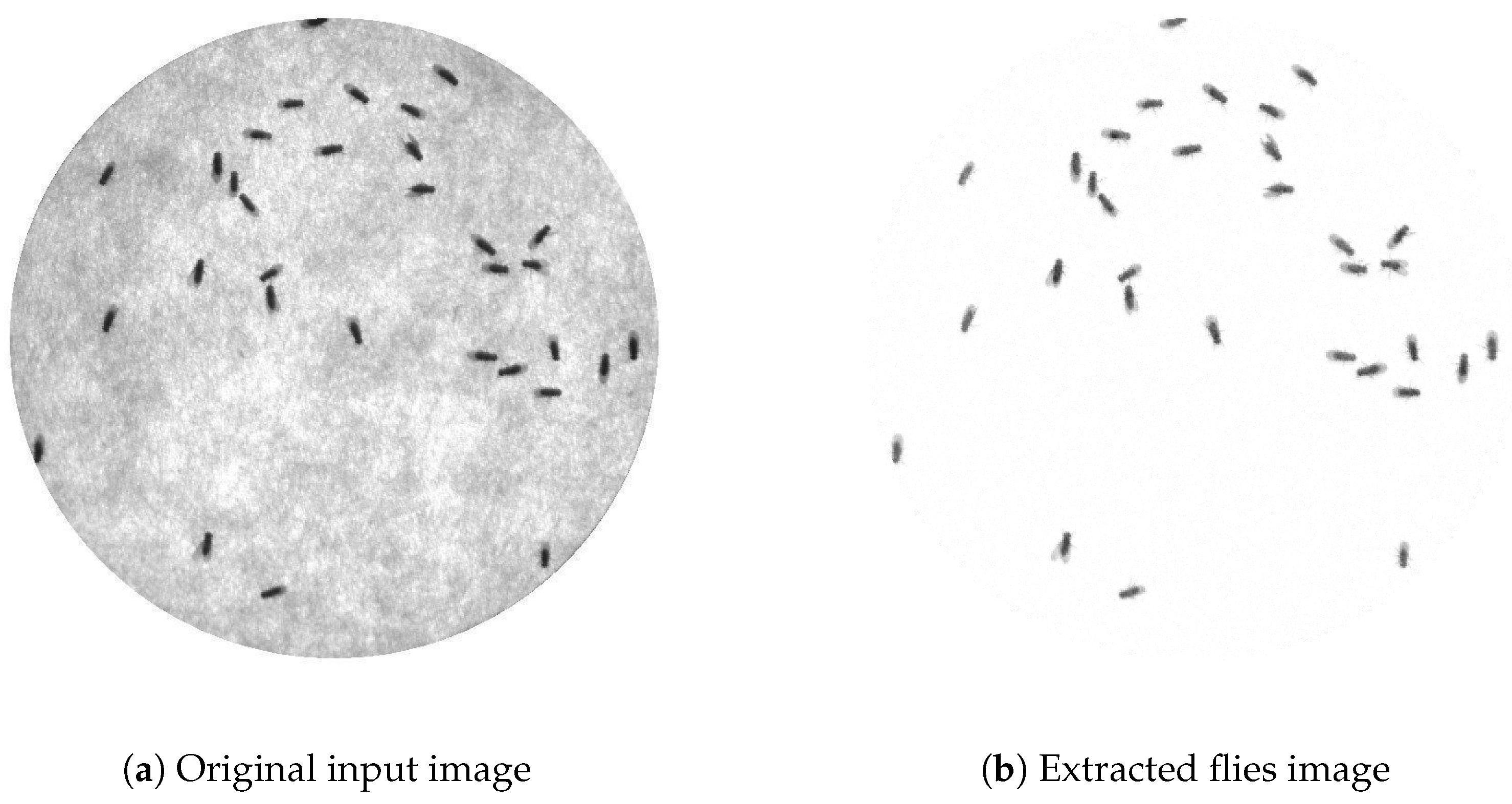
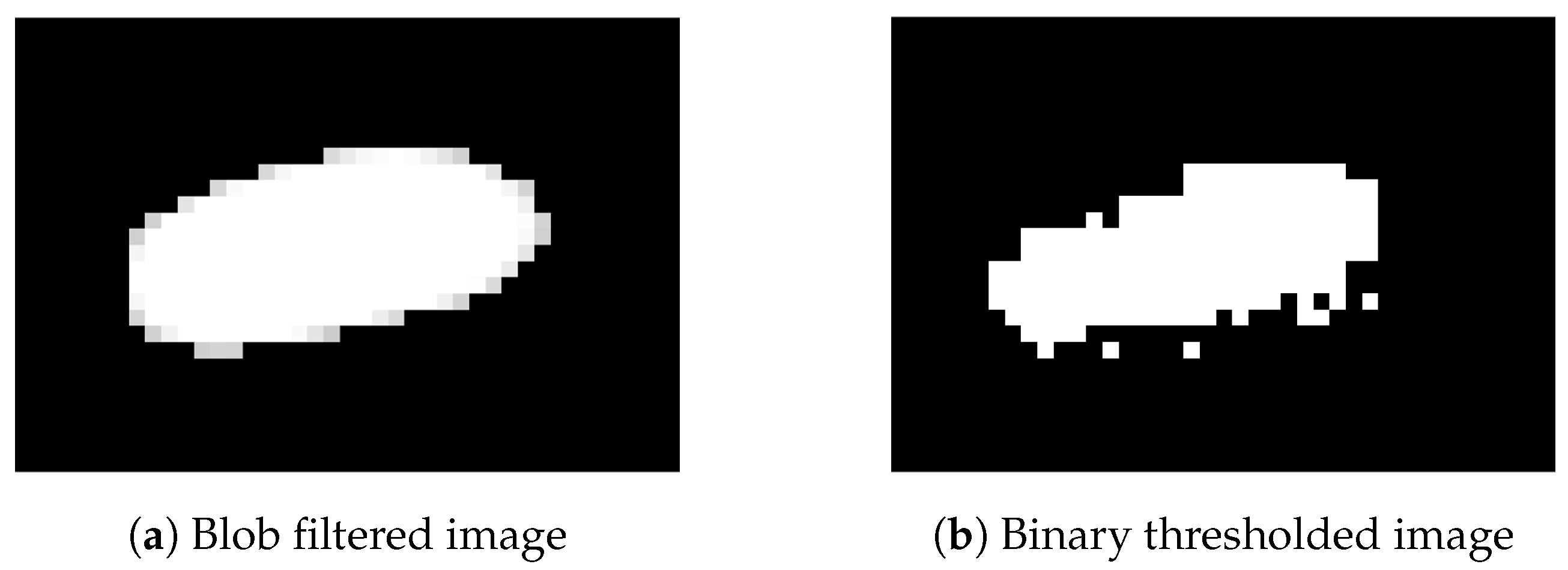
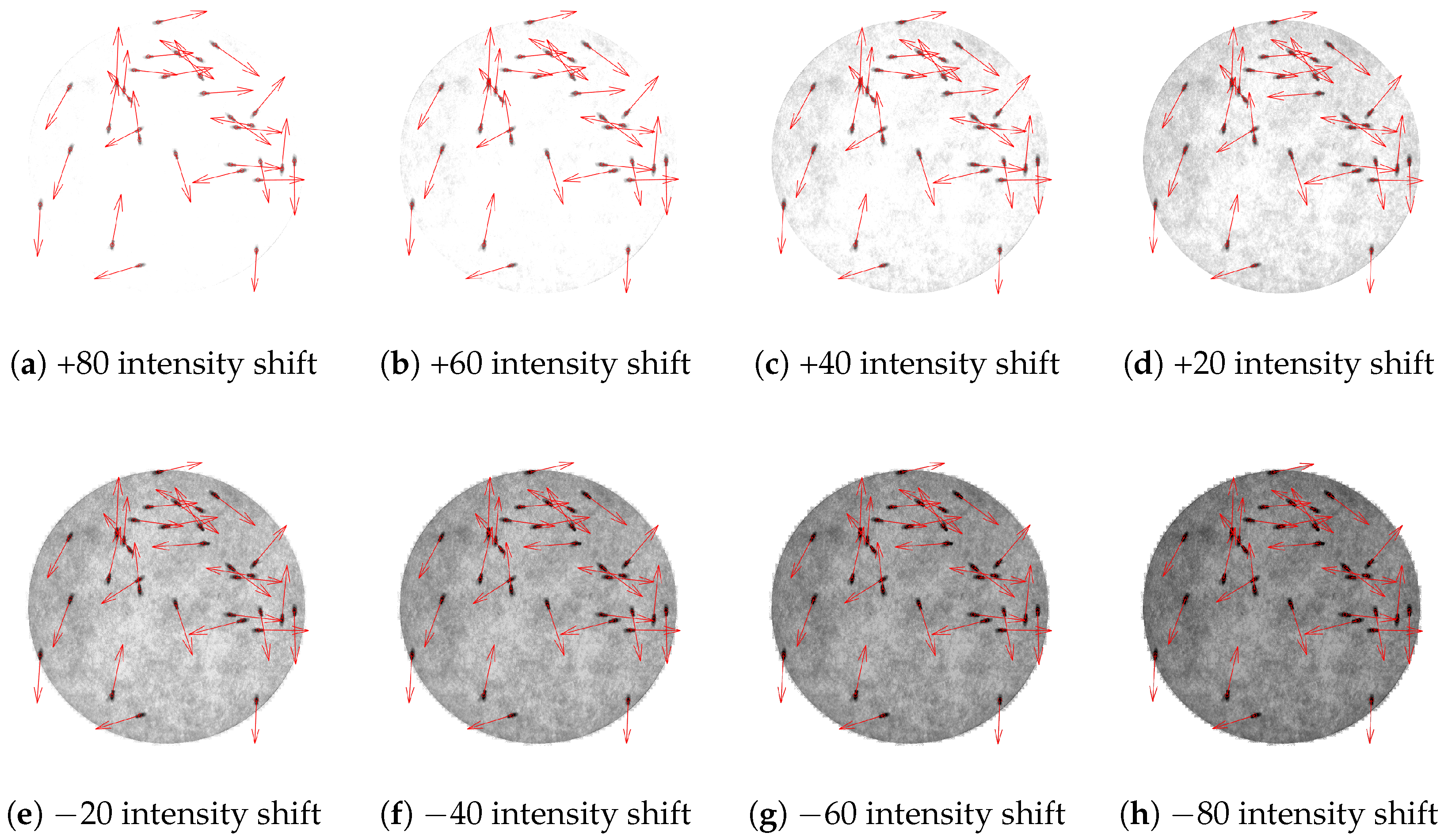
3.1. Foreground Detection
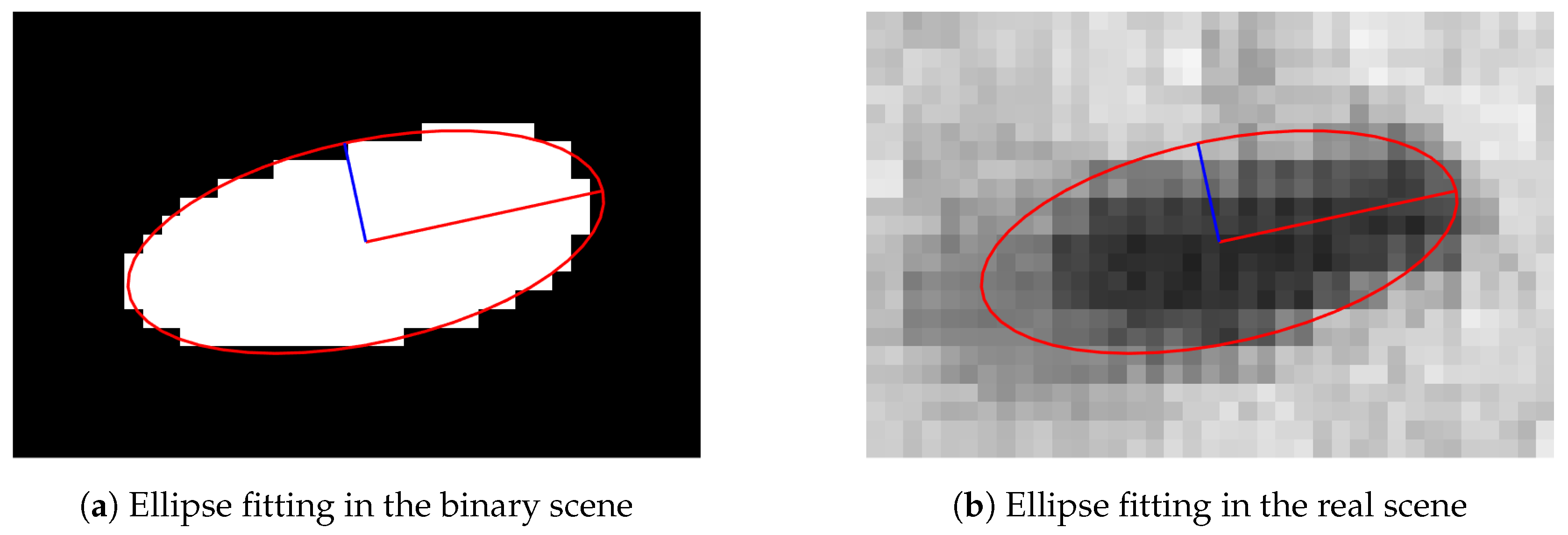
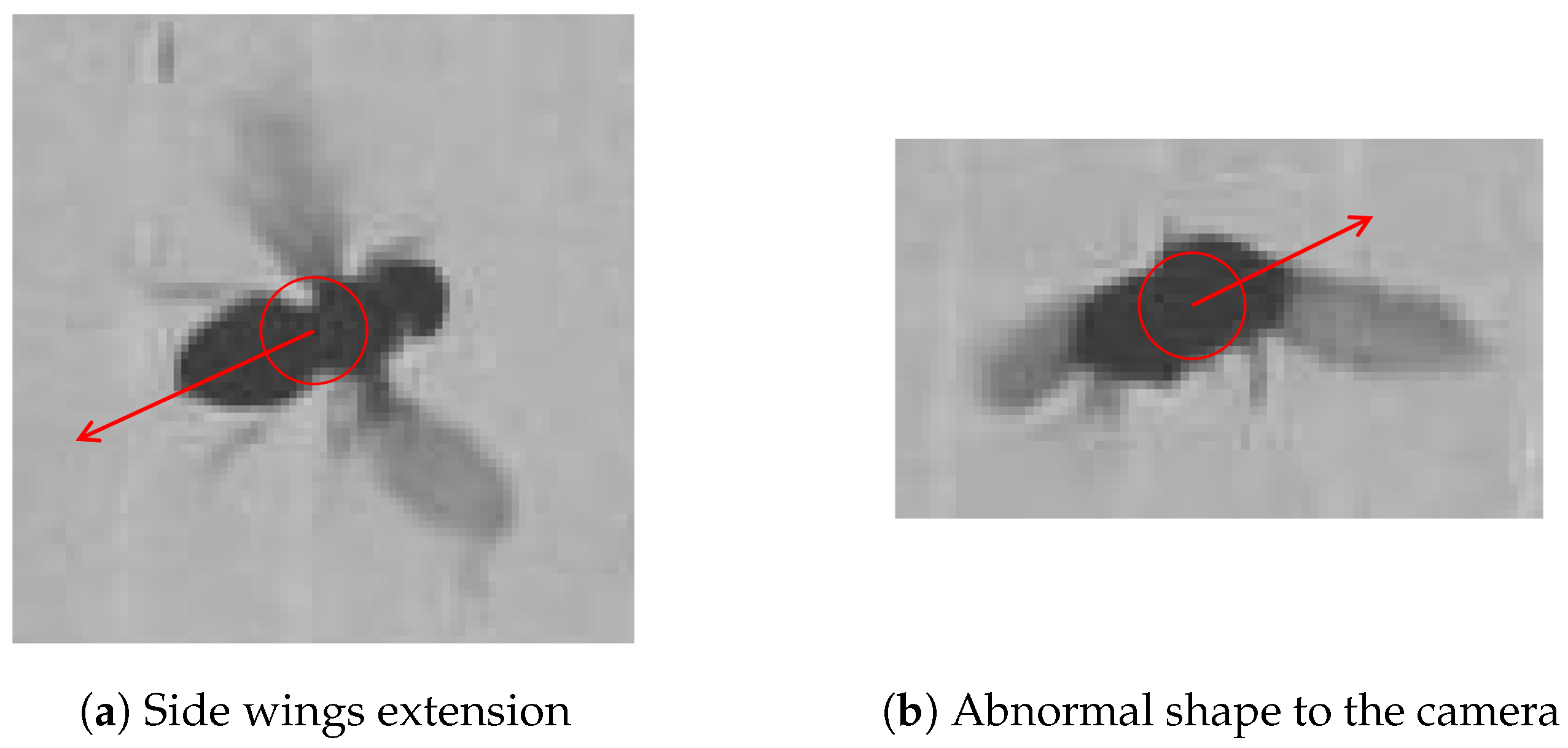
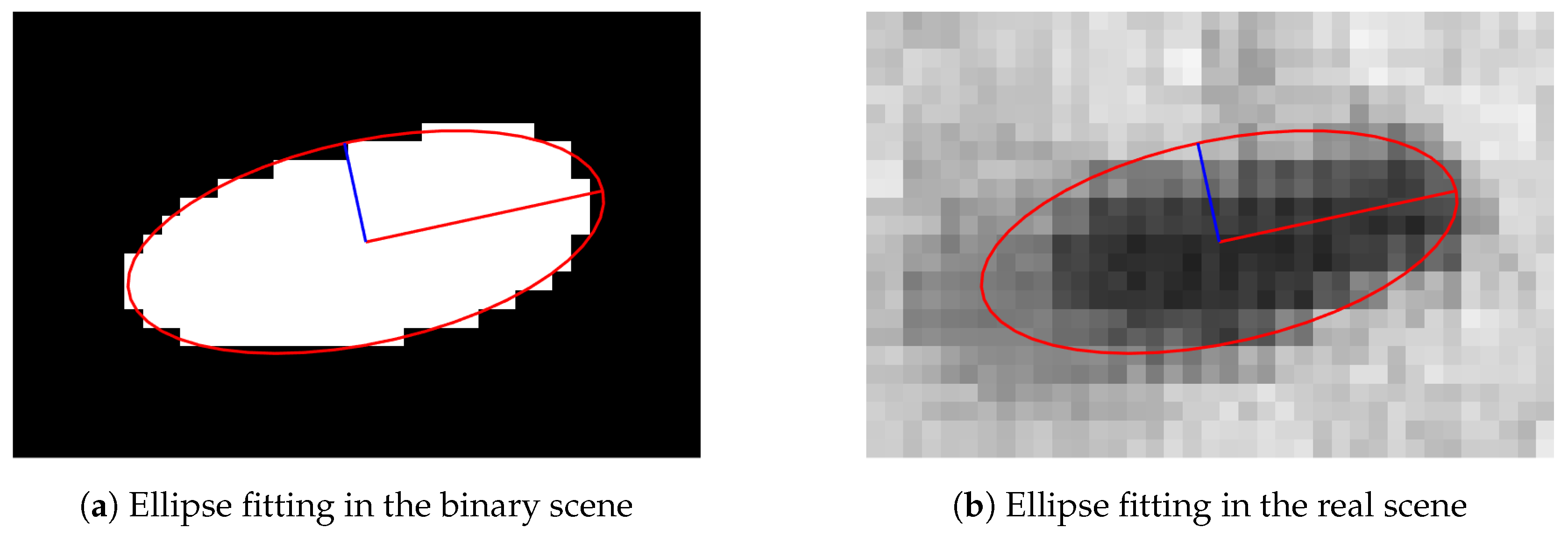
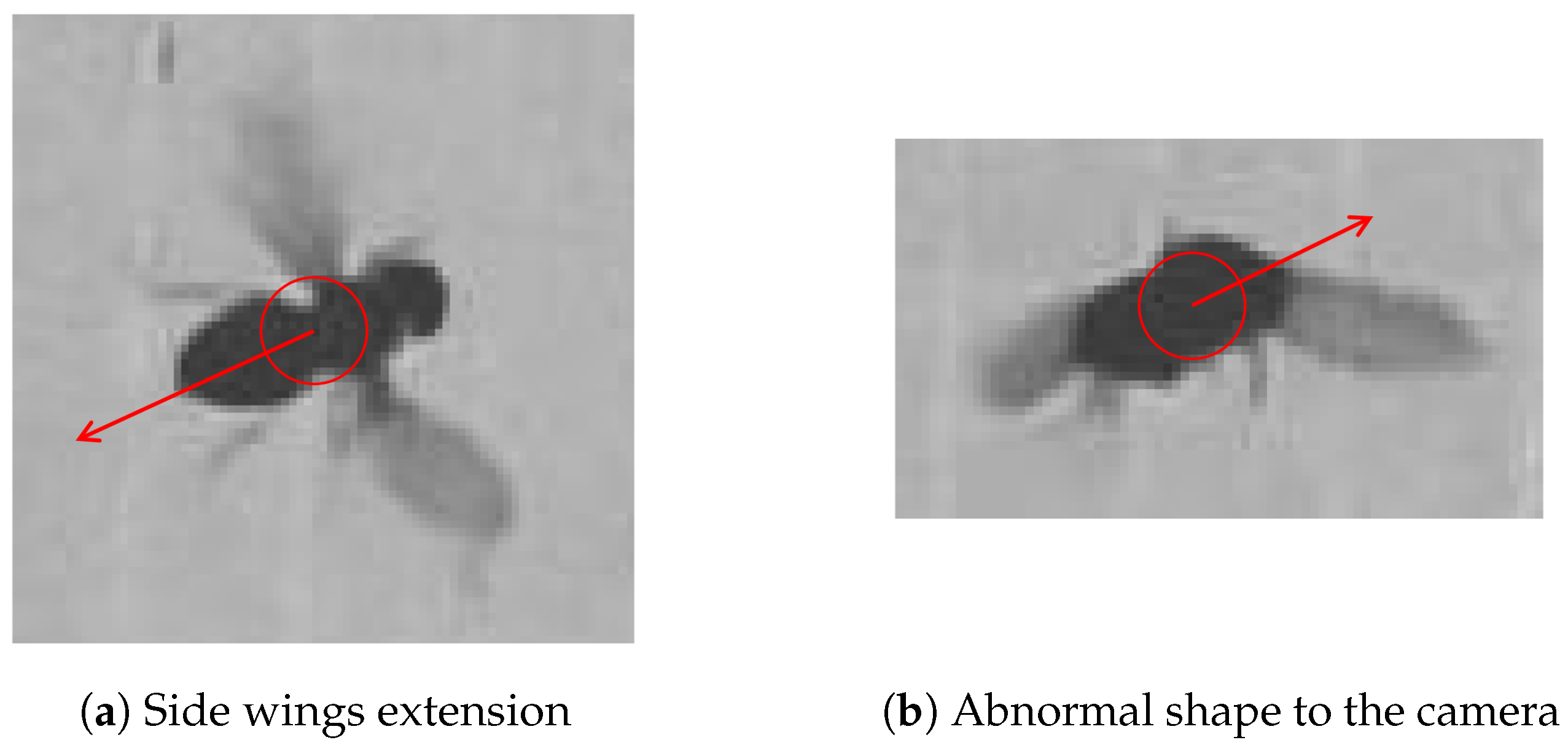
3.2. Posture Modeling
| Algorithm 1: Heading direction detection algorithm. |
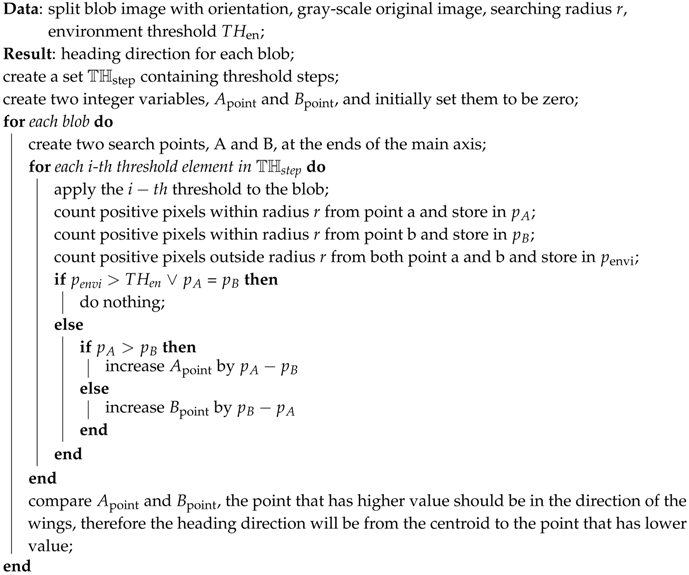 |
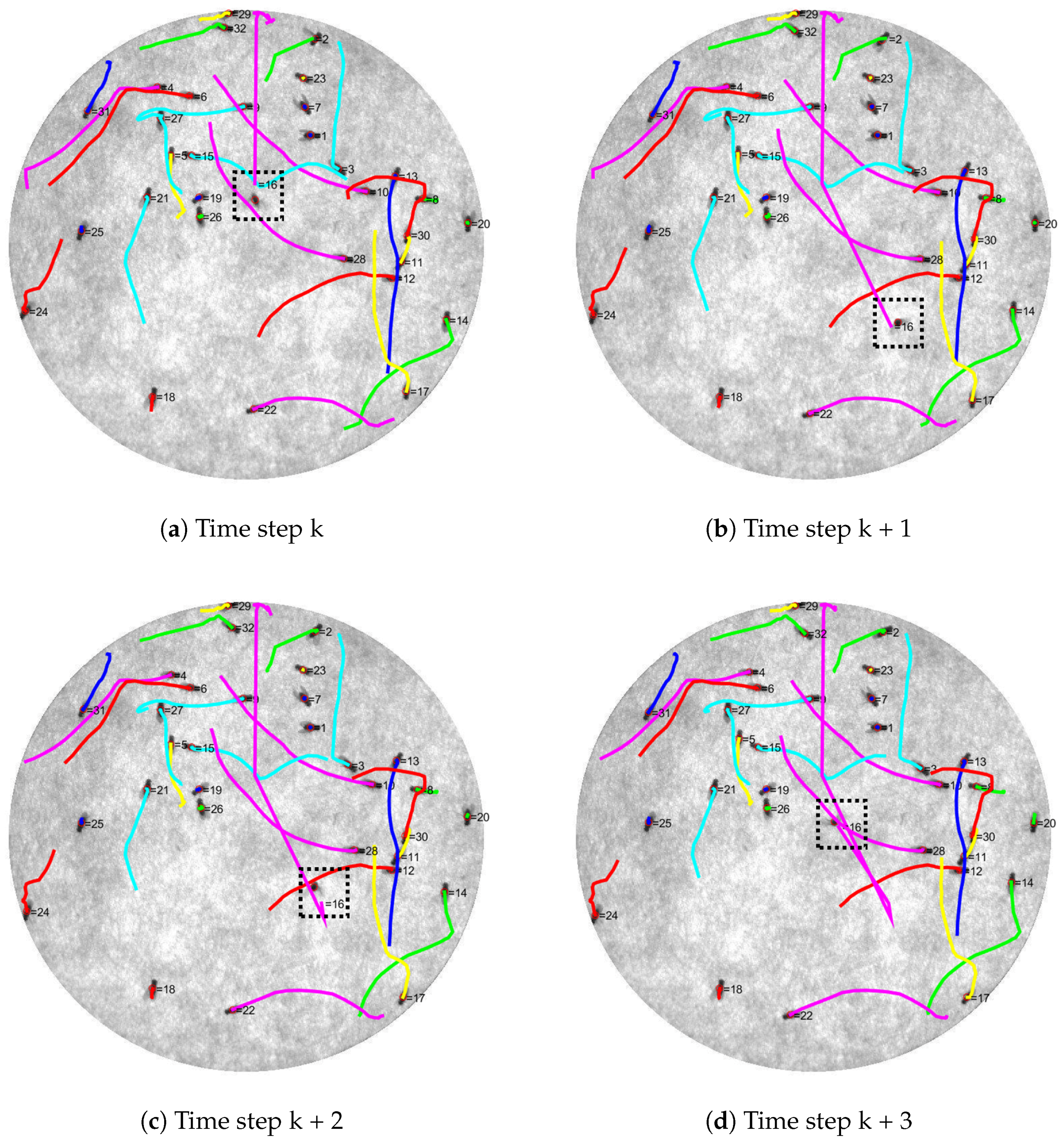
3.3. Tracking
3.3.1. Kalman Filter
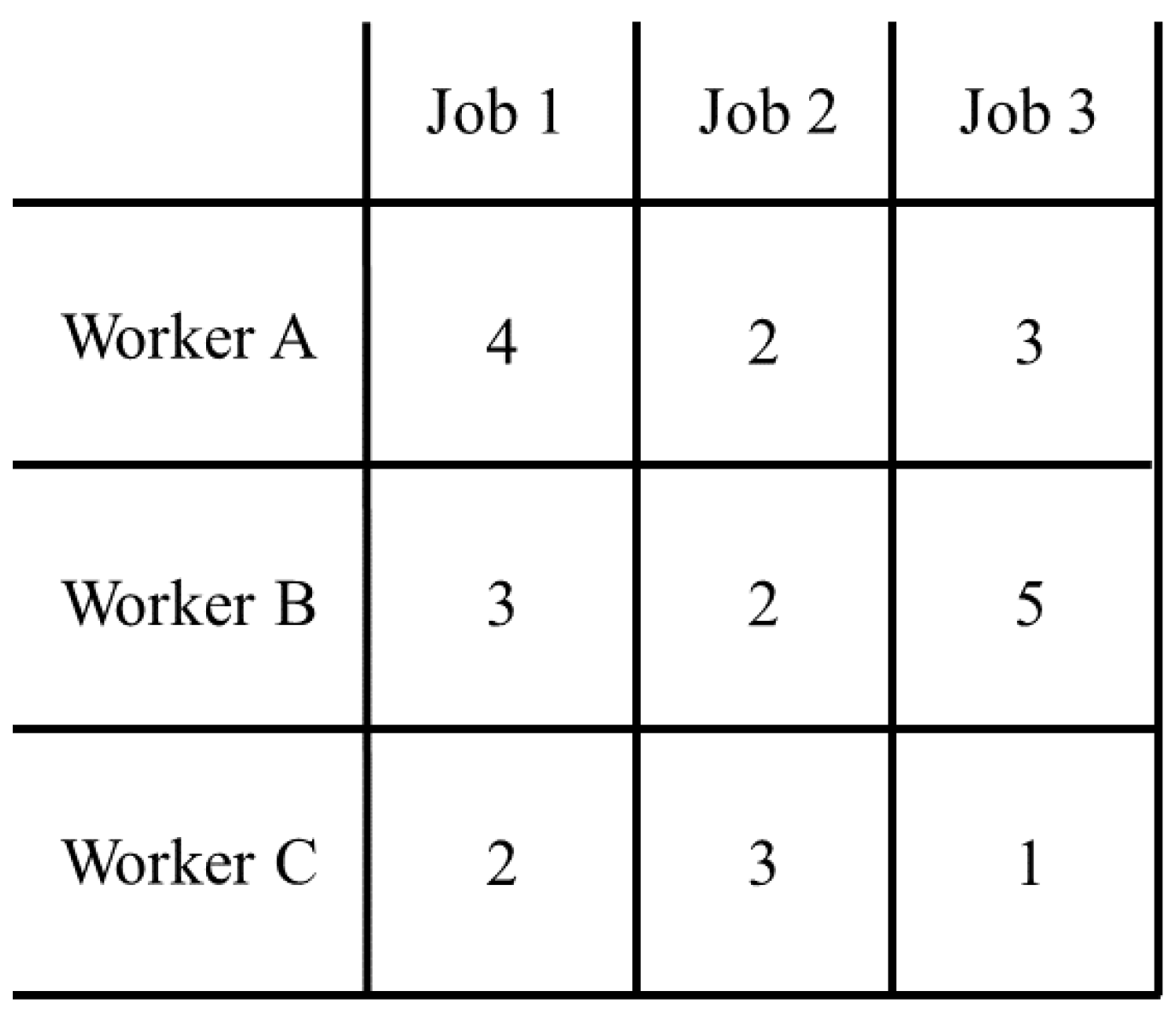
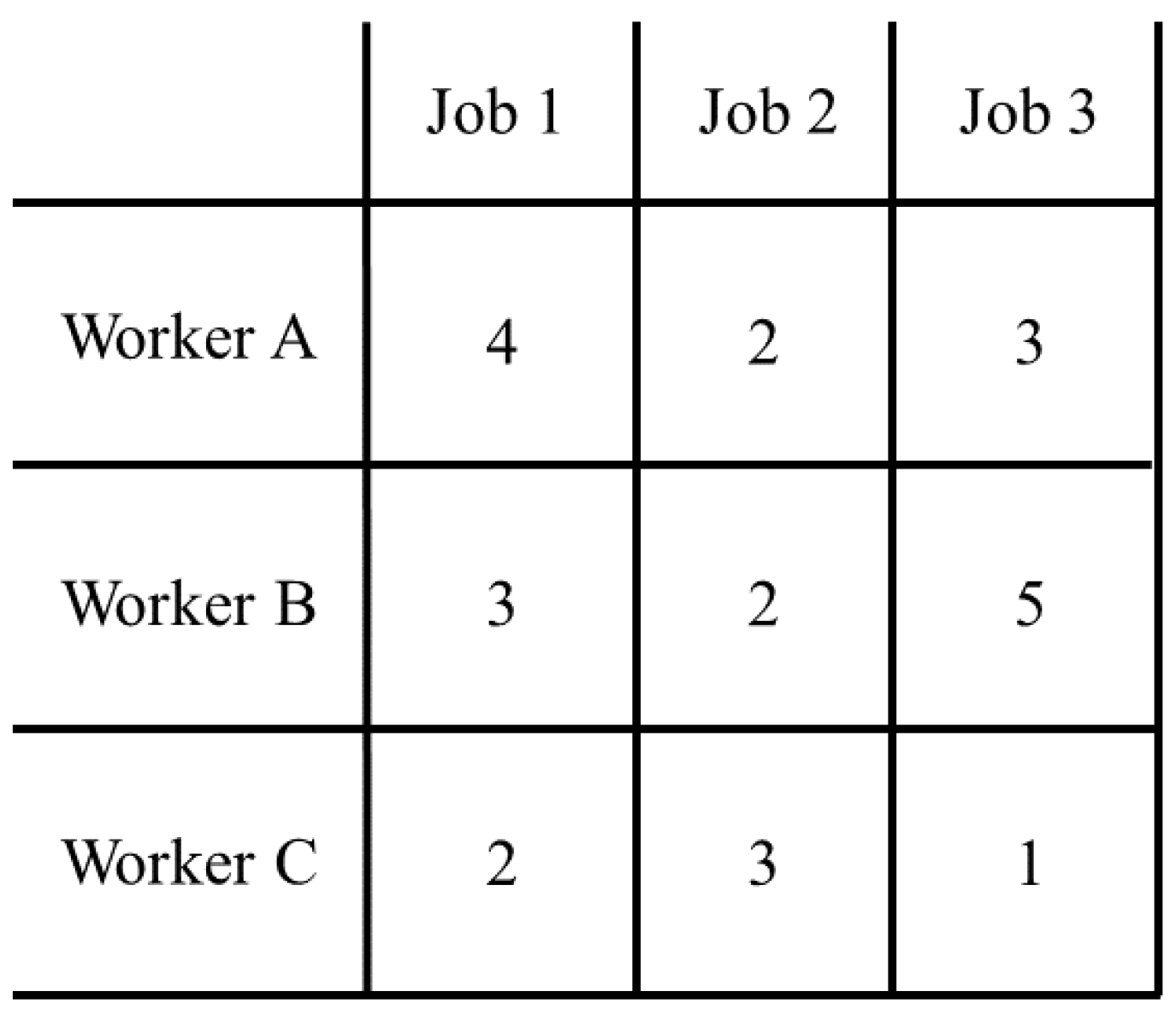
3.3.2. Hungarian Assignment Algorithm
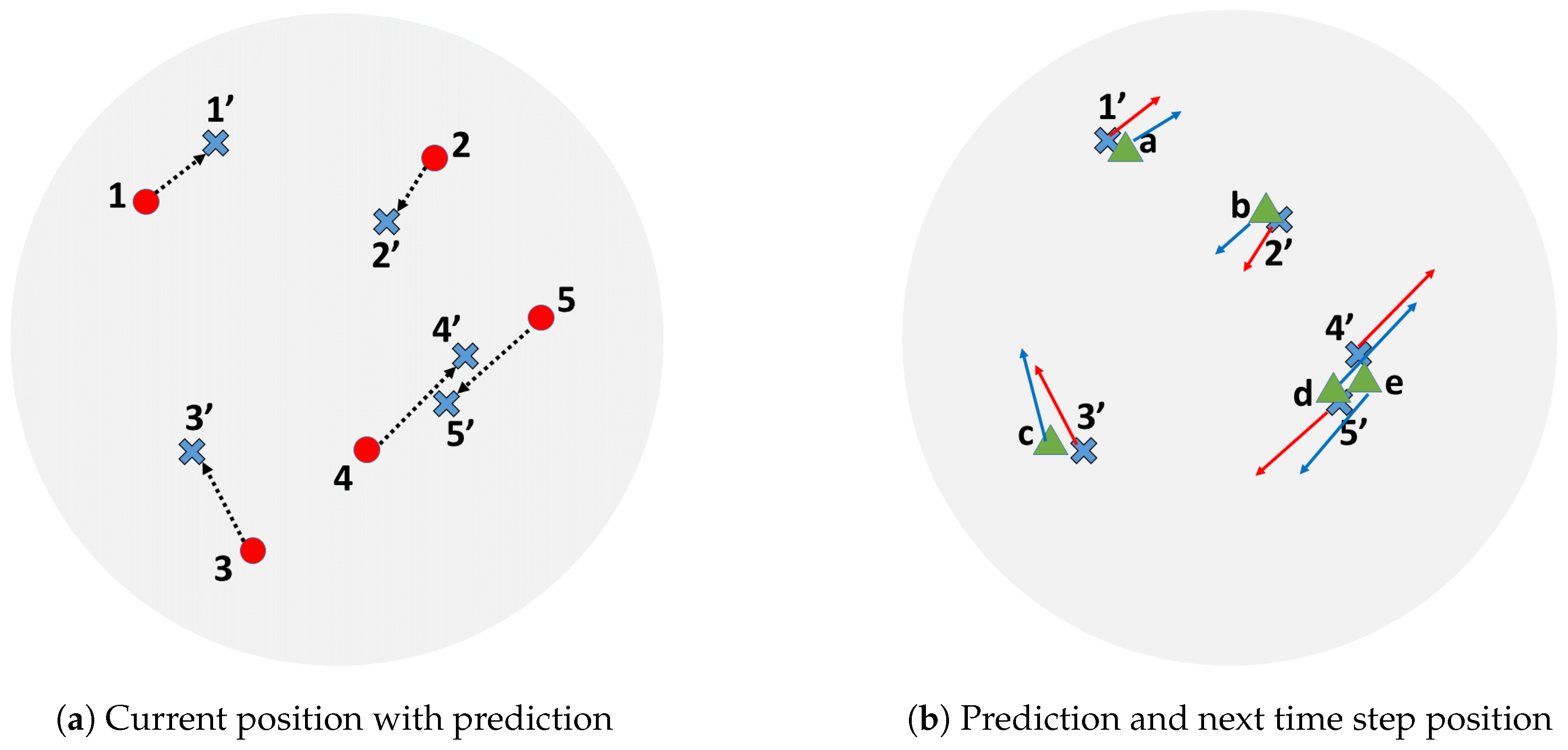
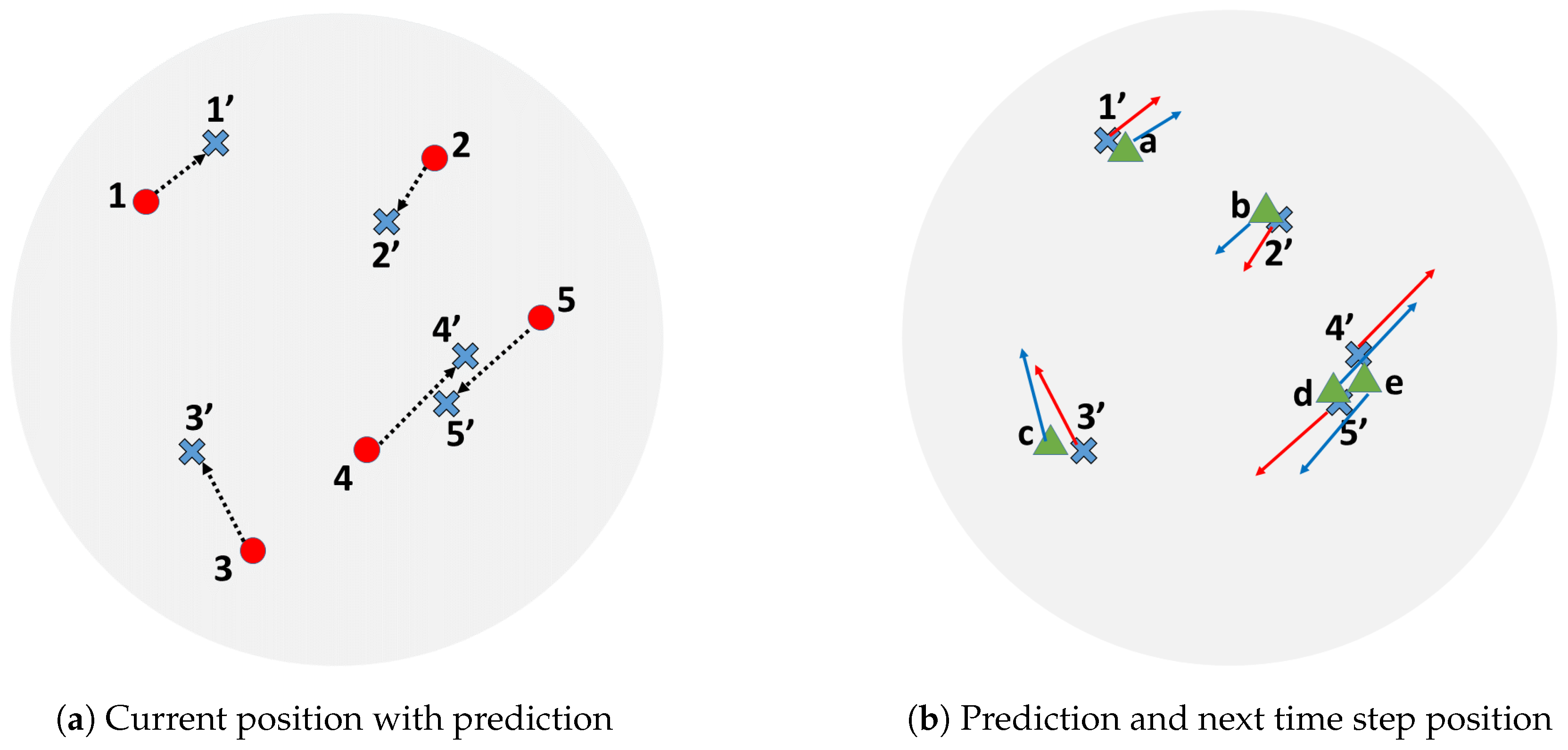
3.3.3. The Closest Neighbor Assignment Algorithm
| Algorithm 2: The closest neighbor assignment algorithm. |
 |
3.3.4. Tracking Process
4. Results and Discussion
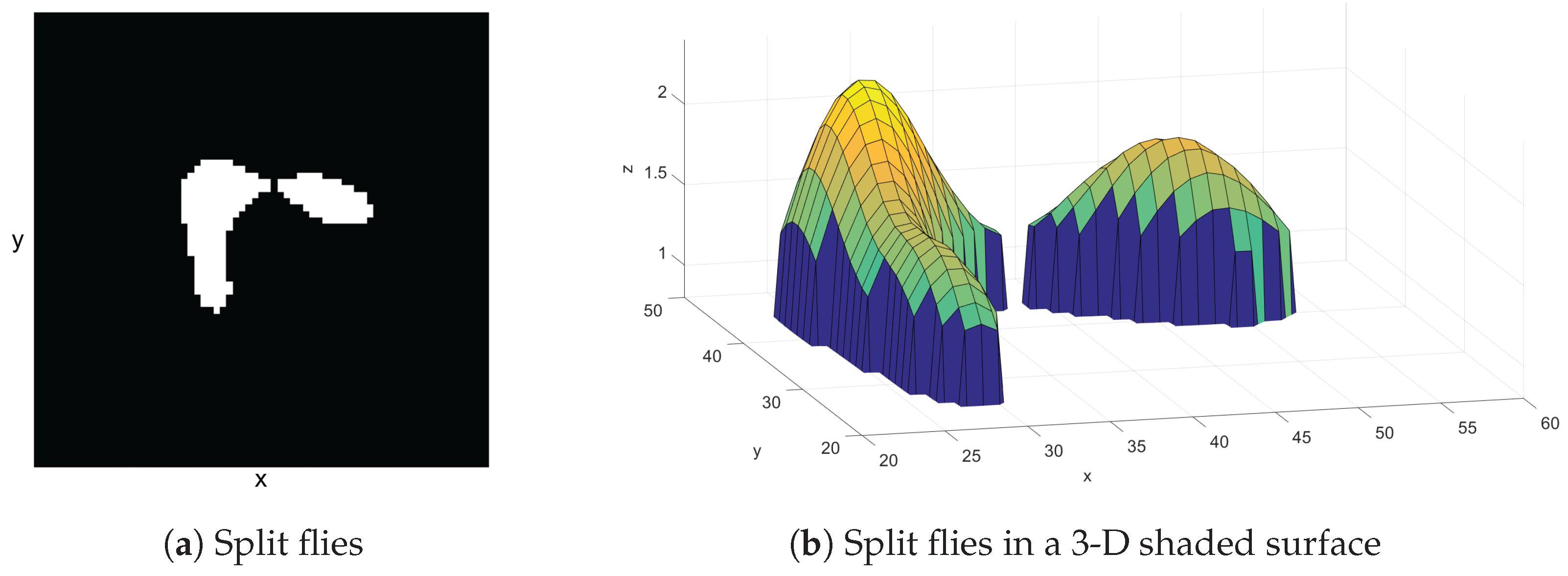
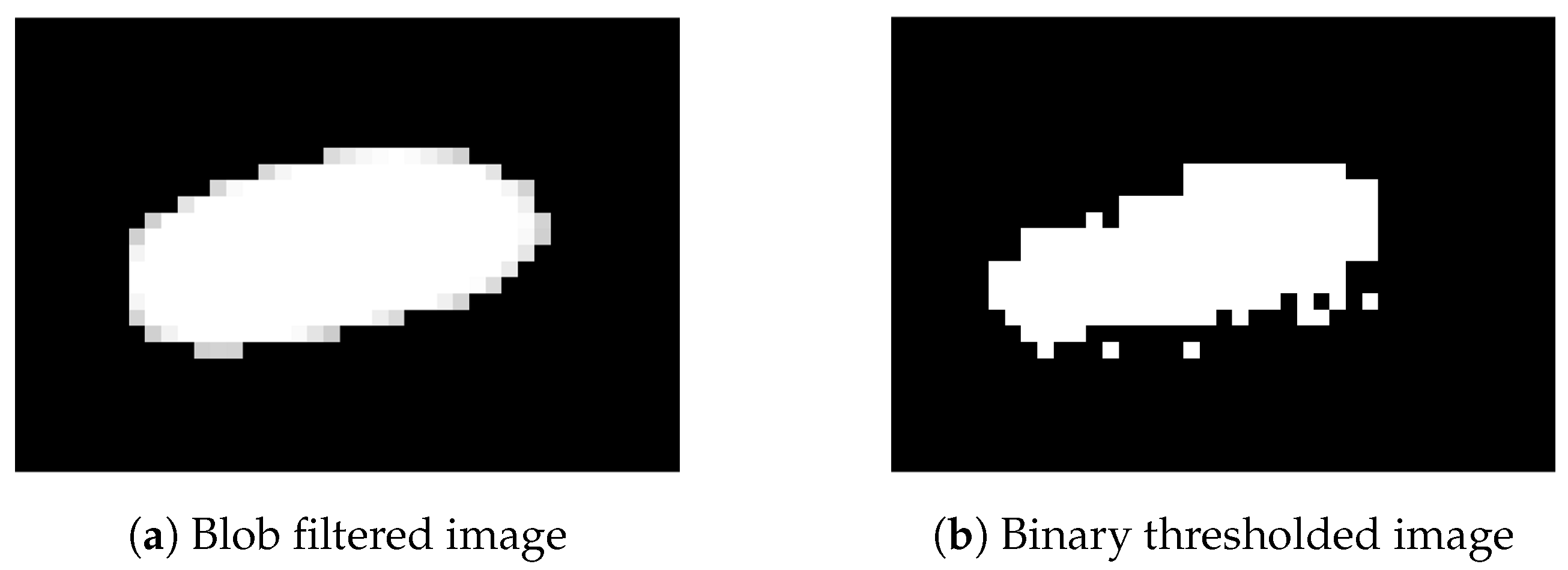
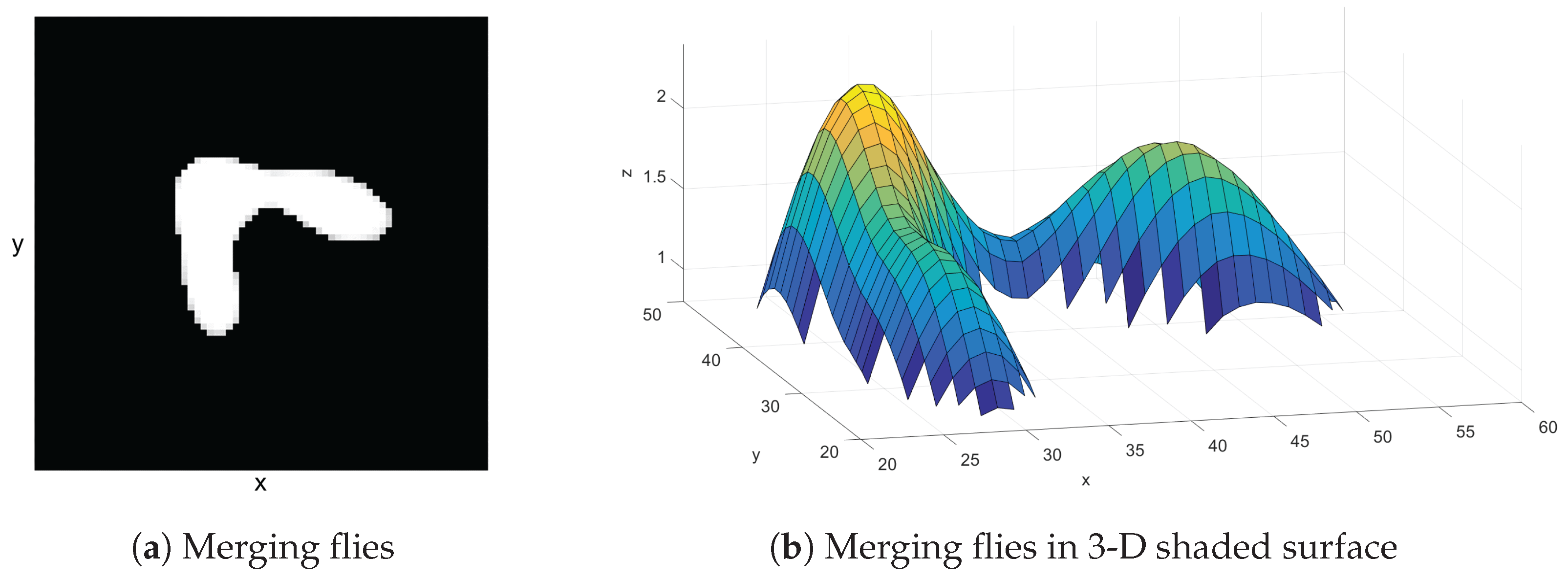
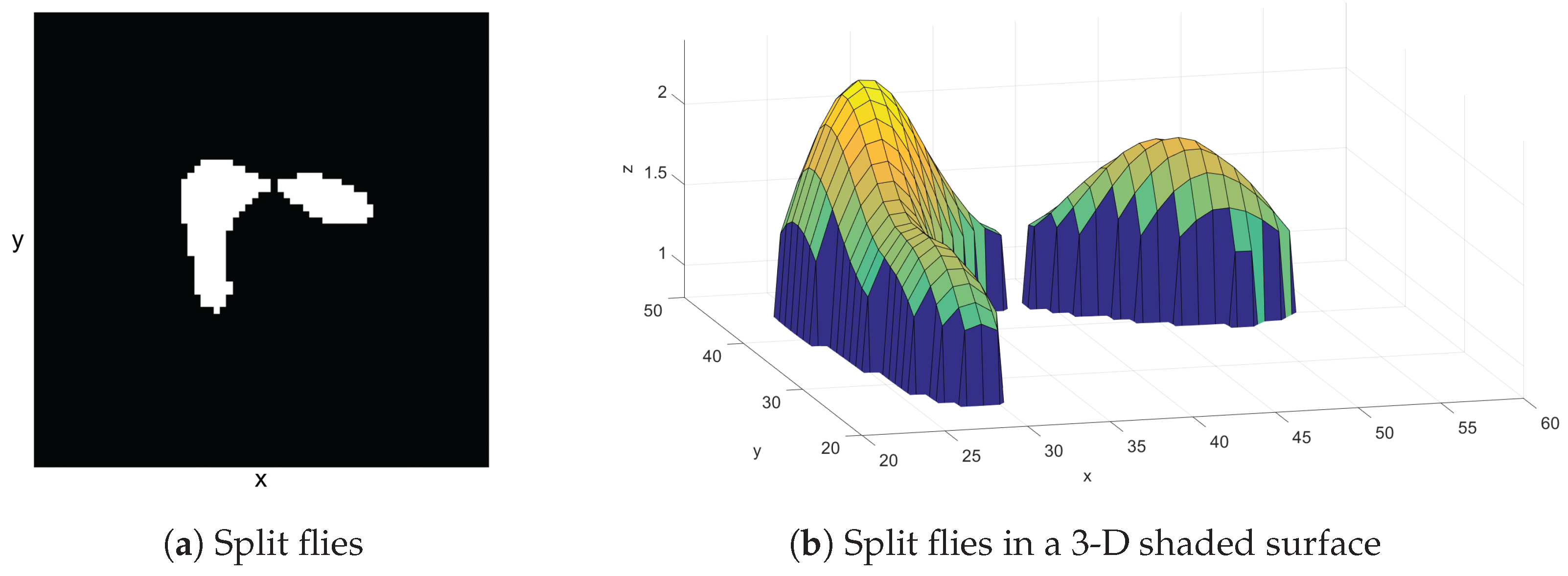
4.1. Blob Filtering and Splitting of Merging Flies
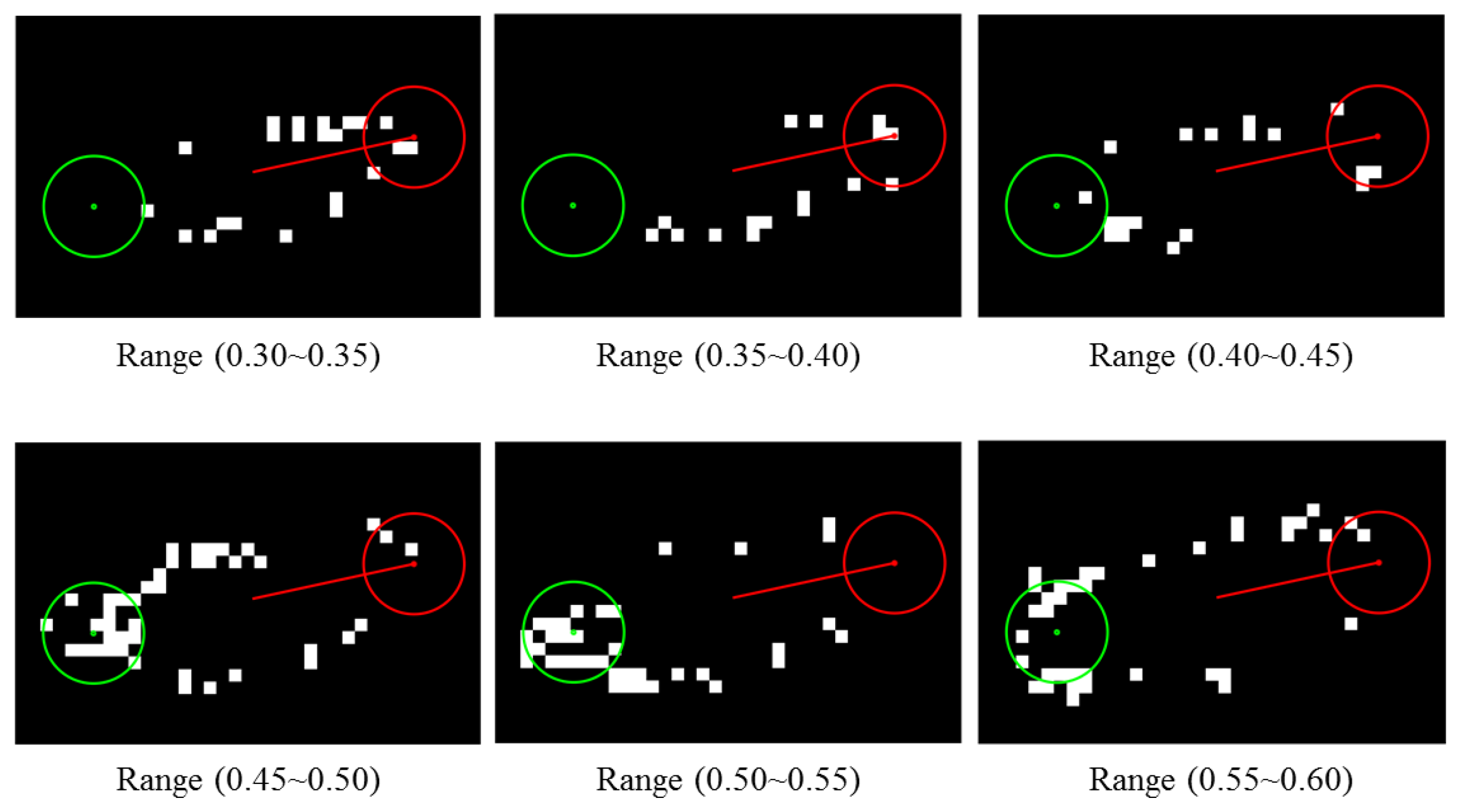
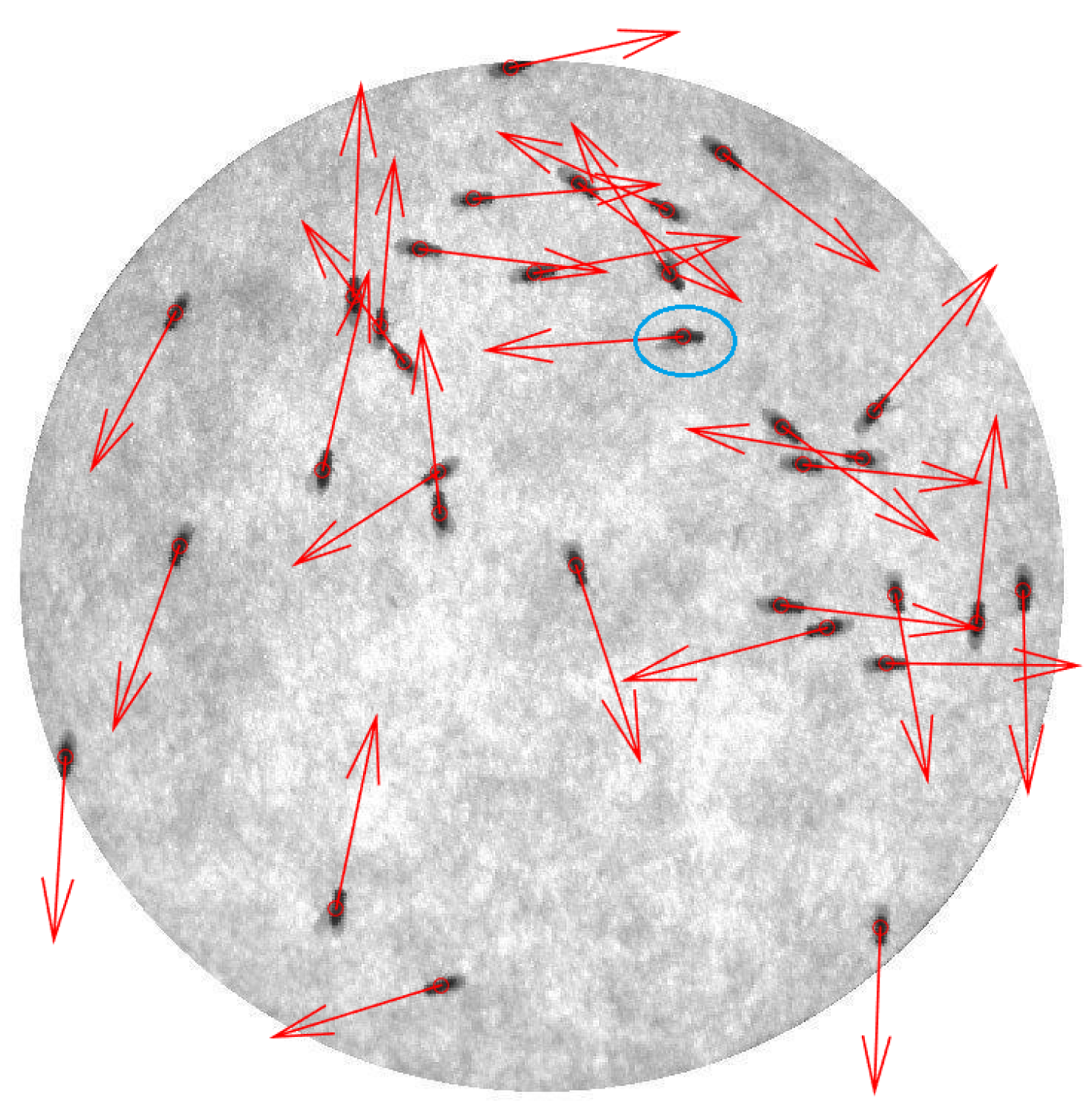
4.2. Heading Direction
4.3. Identity Assignment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Thoma, V.; Knapek, S.; Arai, S.; Hartl, M.; Kohsaka, H.; Sirigrivatanawong, P.; Abe, A.; Hashimoto, K.; Tanimoto, H. Functional dissociation in sweet taste receptor neurons between and within taste organs of Drosophila. Nat. Commun. 2016, 7, 10678. [Google Scholar] [CrossRef] [PubMed]
- Arai, S.; Sirigrivatanawong, P.; Hashimoto, K. Multiple Drosophila tracking and posture estimation algorithm. In Proceedings of the 4th International Conference on Informatics, Electronics & Vision (ICIEV), Fukuoka, Japan, 15–18 June 2015; pp. 1–6.
- Veeraraghavan, A.; Chellappa, R.; Srinivasan, M. Shape-and-Behavior Encoded Tracking of Bee Dances. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 463–476. [Google Scholar] [CrossRef] [PubMed]
- Wehrhahn, C.; Poggio, T.; Bülthoff, H. Tracking and chasing in houseflies (Musca). Biol. Cybern. 1982, 45, 123–130. [Google Scholar] [CrossRef]
- Khan, Z.; Balch, T.; Dellaert, F. An MCMC-Based Particle Filter for Tracking Multiple Interacting Targets. In Computer Vision—ECCV 2004, Proceedings of the 8th European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; Pajdla, T., Matas, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 279–290. [Google Scholar]
- Zabala, F.A. Directionality control and flight stability of takeoff. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 4213–4218.
- Zabala, F.A.; Card, G.M.; Fontaine, E.I.; Dickinson, M.H.; Murray, R.M. Flight Dynamics and Control of Evasive Maneuvers: The Fruit Fly’s Takeoff. IEEE Trans. Biomed. Eng. 2009, 56, 2295–2298. [Google Scholar] [CrossRef] [PubMed]
- Fry, S.N.; Rohrseitz, N.; Straw, A.D.; Dickinson, M.H. TrackFly: Virtual reality for a behavioral system analysis in free-flying fruit flies. J. Neurosci. Methods 2008, 171, 110–117. [Google Scholar] [CrossRef] [PubMed]
- Fan, J.; Jiang, N.; Wu, Y. Automatic video-based analysis of animal behaviors. In Proceedings of the 2010 IEEE International Conference on Image Processing, Hong Kong, China, 26–29 September 2010; pp. 1513–1516.
- Li, M.; Zhu, Y.; Huang, J. Video Background Extraction Based on Improved Mode Algorithm. In Proceedings of the 2009 3rd International Conference on Genetic and Evolutionary Computing, Guilin, China, 14–17 October 2009; pp. 331–334.
- Elgammal, A. Background Subtraction: Theory and Practice. In Wide Area Surveillance: Real-time Motion Detection Systems; Asari, K.V., Ed.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–21. [Google Scholar]
- Stauffer, C.; Grimson, W.E.L. Adaptive background mixture models for real-time tracking. In Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Fort Collins, CO, USA, 23–25 June 1999; Volume 2, pp. 1–252.
- Power, P.W.; Schoonees, J.A. Understanding background mixture models for foreground segmentation. In Proceedings of the Image and Vision Computing New Zealand, Auckland, New Zealand, 26–28 November 2002; pp. 10–11.
- Deutscher, J.; Blake, A.; Reid, I. Articulated body motion capture by annealed particle filtering. In Proceedings of the 2000 IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head Island, SC, USA, 15 June 2000; Volume 2, pp. 126–133.
- Oliver, N.M.; Rosario, B.; Pentland, A.P. A Bayesian computer vision system for modeling human interactions. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 831–843. [Google Scholar] [CrossRef]
- Deng, H.; Tian, X.; Yamazaki, K.; Mori, M. Line Extraction with Composite Background Subtract. In Proceedings of the 3rd Canadian Conference on Computer and Robot Vision (CRV’06), Quebec, QC, Canada, 7–9 June 2006; p. 69.
- Robert, M.H. Image Analysis Using Mathematical Morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 532–550. [Google Scholar]
- Kong, H.; Akakin, H.C.; Sarma, S.E. A Generalized Laplacian of Gaussian Filter for Blob Detection and Its Applications. IEEE Trans. Cybern. 2013, 43, 1719–1733. [Google Scholar] [CrossRef] [PubMed]
- Mulchrone, K.F.; Choudhury, K.R. Fitting an ellipse to an arbitrary shape: implications for strain analysis. J. Struct. Geol. 2004, 26, 143–153. [Google Scholar] [CrossRef]
- Branson, K.; Robie, A.A.; Bender, J.; Perona, P.; Dickinson, M.H. High-throughput ethomics in large groups of Drosophila. Nat. Meth. 2009, 6, 451–457. [Google Scholar] [CrossRef] [PubMed]
- Kabra, M.; Robie, A.A.; Rivera-Alba, M.; Branson, S.; Branson, K. JAABA: Interactive machine learning for automatic annotation of animal behavior. Nat. Meth. 2013, 10, 64–67. [Google Scholar] [CrossRef] [PubMed]
- Perez-Escudero, A.; Vicente-Page, J.; Hinz, R.C.; Arganda, S.; de Polavieja, G.G. idTracker: Tracking individuals in a group by automatic identification of unmarked animals. Nat. Meth. 2014, 11, 743–748. [Google Scholar] [CrossRef] [PubMed]
- Kuhn, H.W. The Hungarian method for the assignment problem. Naval Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Markus Buehre, Functions for the Rectangular Assignment Problem, MATLAB Central File Exchange. 2014. Available online: https://www.mathworks.com/matlabcentral/fileexchange/6543 (accessed on 6 April 2016).
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice with MATLAB; Wiley-IEEE Press: New York, NY, USA, 2014; p. 640. [Google Scholar]
- TPro. Available online: https://drive.google.com/drive/folders/0B2FvzGSXPe3pNEZNcktPbERwSzQ?usp=sharing (accessed on 2 December 2016).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Frames (Flies/Frame) | [Pixel/Second] | Crossing | Swapping (Cross-Swap) | Loss | FP |
|---|---|---|---|---|---|---|
| Video_1 | 1184 (32) | 93.78 | 5 | 10 (4) | 0 | 0 |
| Video_2 | 1500 (26) | 13.34 | 7 | 2 (0) | 0 | 0 |
| Video_3 | 1043 (25) | 22.63 | 14 | 7 (7) | 0 | 0 |
| Video_4 | 987 (27) | 37.48 | 16 | 3 (3) | 0 | 0 |
| Video_5 | 1269 (31) | 34.07 | 16 | 13 (6) | 4 | 472 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sirigrivatanawong, P.; Arai, S.; Thoma, V.; Hashimoto, K. Multiple Drosophila Tracking System with Heading Direction. Sensors 2017, 17, 96. https://doi.org/10.3390/s17010096
Sirigrivatanawong P, Arai S, Thoma V, Hashimoto K. Multiple Drosophila Tracking System with Heading Direction. Sensors. 2017; 17(1):96. https://doi.org/10.3390/s17010096
Chicago/Turabian StyleSirigrivatanawong, Pudith, Shogo Arai, Vladimiros Thoma, and Koichi Hashimoto. 2017. "Multiple Drosophila Tracking System with Heading Direction" Sensors 17, no. 1: 96. https://doi.org/10.3390/s17010096
APA StyleSirigrivatanawong, P., Arai, S., Thoma, V., & Hashimoto, K. (2017). Multiple Drosophila Tracking System with Heading Direction. Sensors, 17(1), 96. https://doi.org/10.3390/s17010096