
A Movement-Assisted Deployment of Collaborating Autonomous Sensors for Indoor and Outdoor Environment Monitoring

Abstract
:1. Introduction
2. Deployment Strategies in a WSN
2.1. Classification of Deployment Strategies
- random dropping,
- stationary deployment,
- movement-assisted deployment.
2.2. Overview of Movement-Assisted Deployment Strategies
- sensors conveyed by single or several mobile platforms,
- mobile sensors.
- one-stage deployment,
- multi-stage deployment.
- pre-defined deployment,
- self-organizing deployment,
- hybrid deployment.
- centralized deployment,
- distributed deployment,
- deployment with coordination.
3. Problem Statement
3.1. Application Scenarios Definition
- Pre-defined deployment: each network node is forced to move in the advisable direction to reach its target location , . The target location can change over time.
- Self-organizing deployment: all devices can move and organize themselves in an as large as possible network to cover the taking into account their detectors and radio ranges.
- Hybrid deployment: the combination of pre-defined and self-organizing strategies.
3.2. Performance Metrics
3.2.1. Connectivity
3.2.2. Compact Coverage
3.2.3. Quality of Transmission
3.2.4. Cost of Deployment
4. Collaborative Mobile Sensing Network Design
4.1. Algorithm for Optimal Displacement of Sensing Device Calculation
4.1.1. Model of a Sensing Device
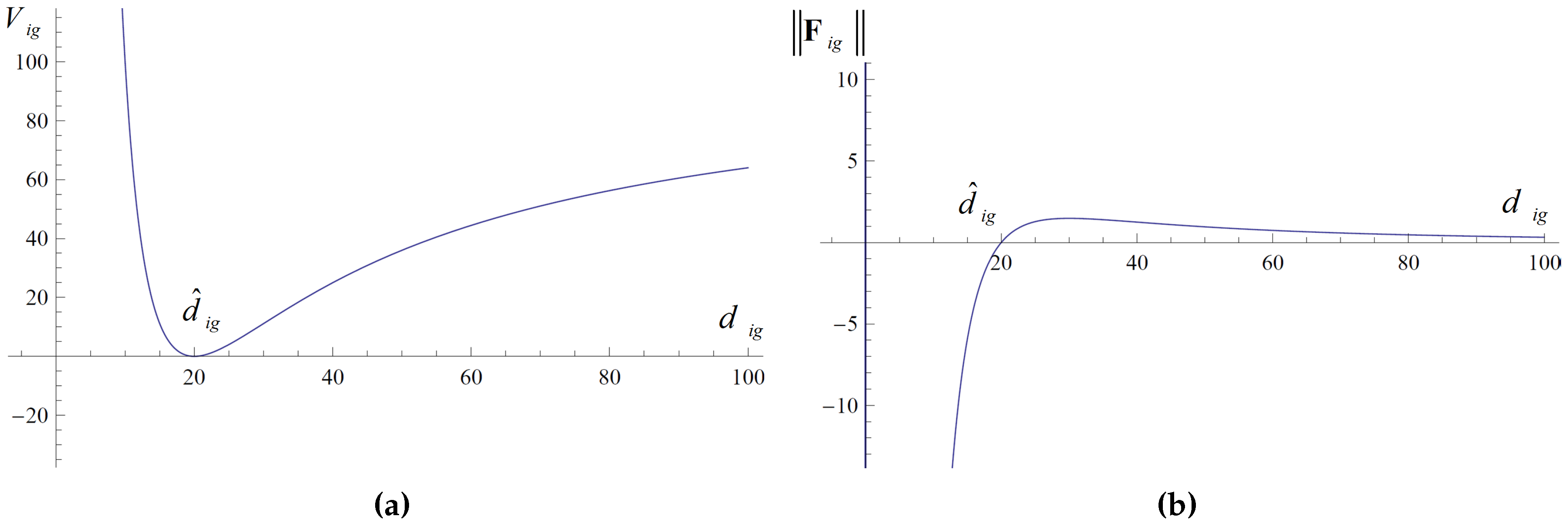
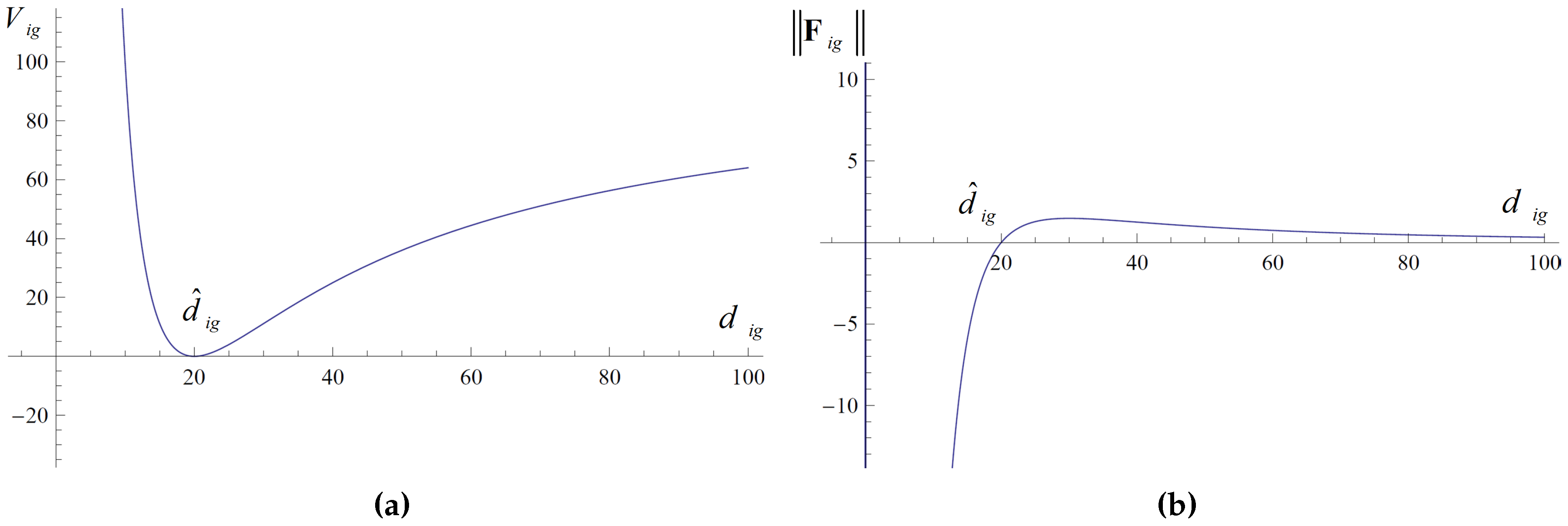
4.1.2. Virtual Force Mobility Model
4.1.3. Algorithm for Collision-Free Traversing Pattern Calculation
- Step 1:
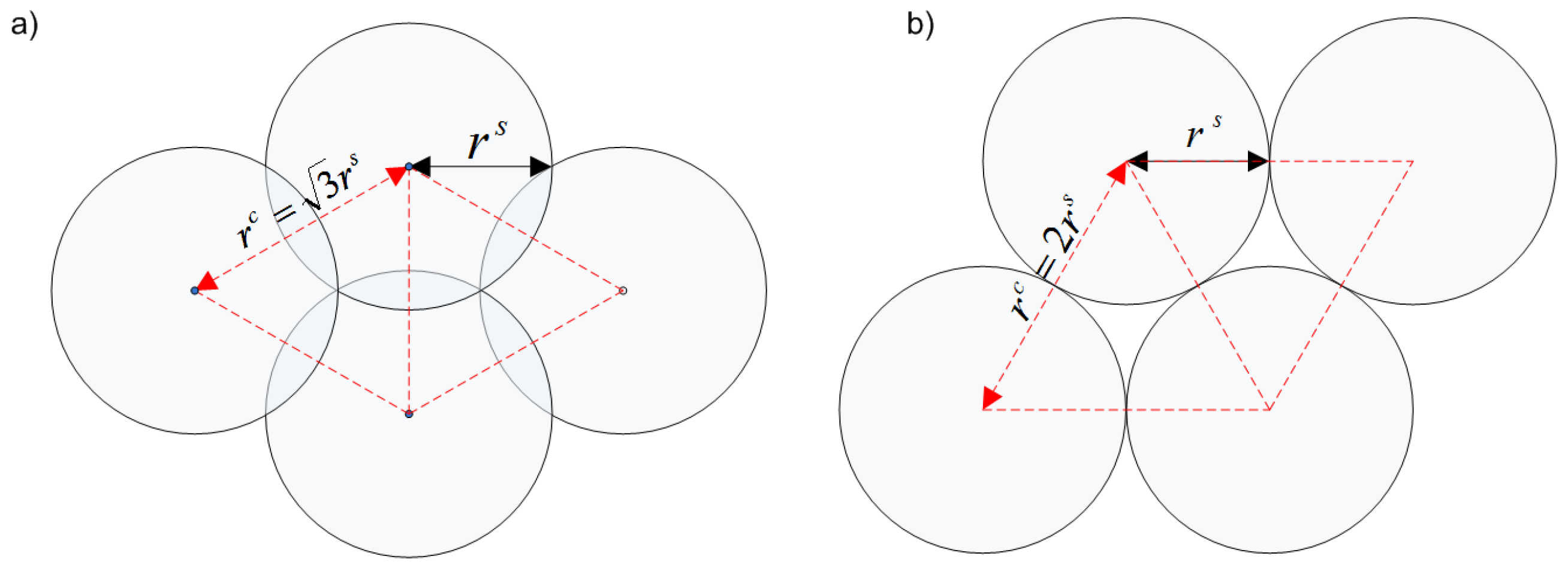
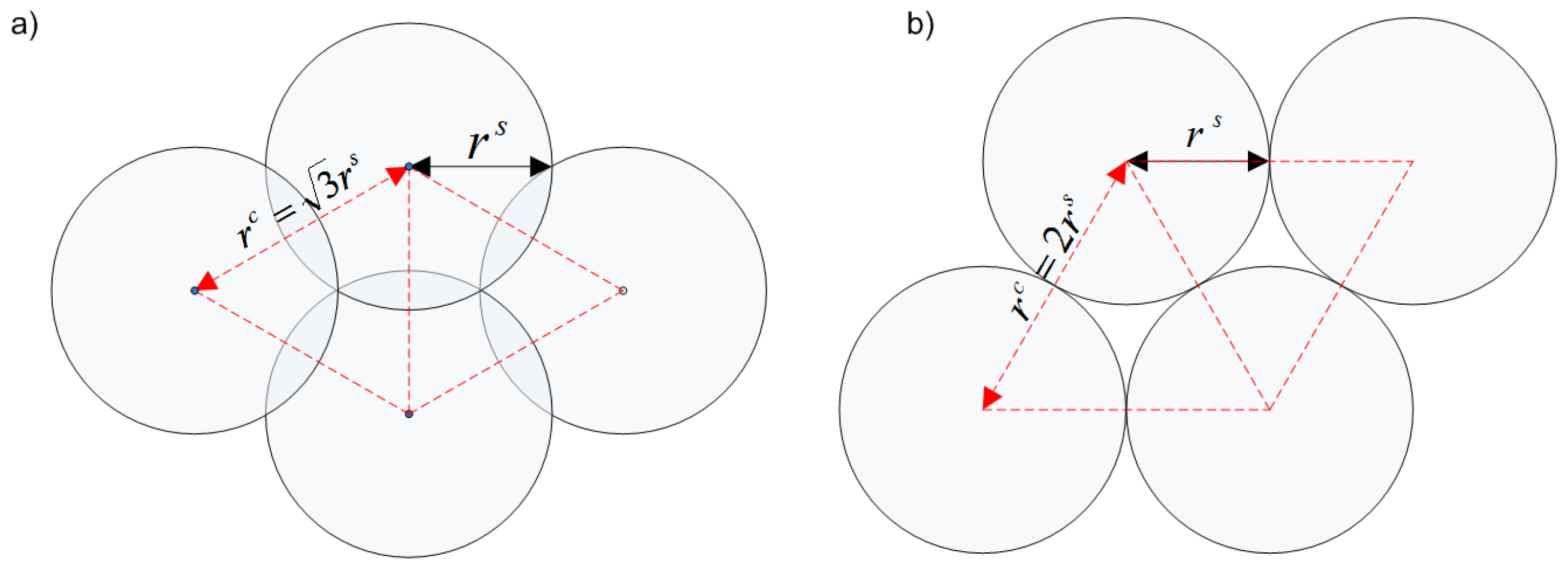
- Estimation of the reference internode distances (, , ) based on the current sensing and transmission ranges of all .
- Step 2:
- Step 3:
- Relocation of to the determined position avoiding all nearby obstacles.
4.2. Deployment Strategies and Computing Schemes
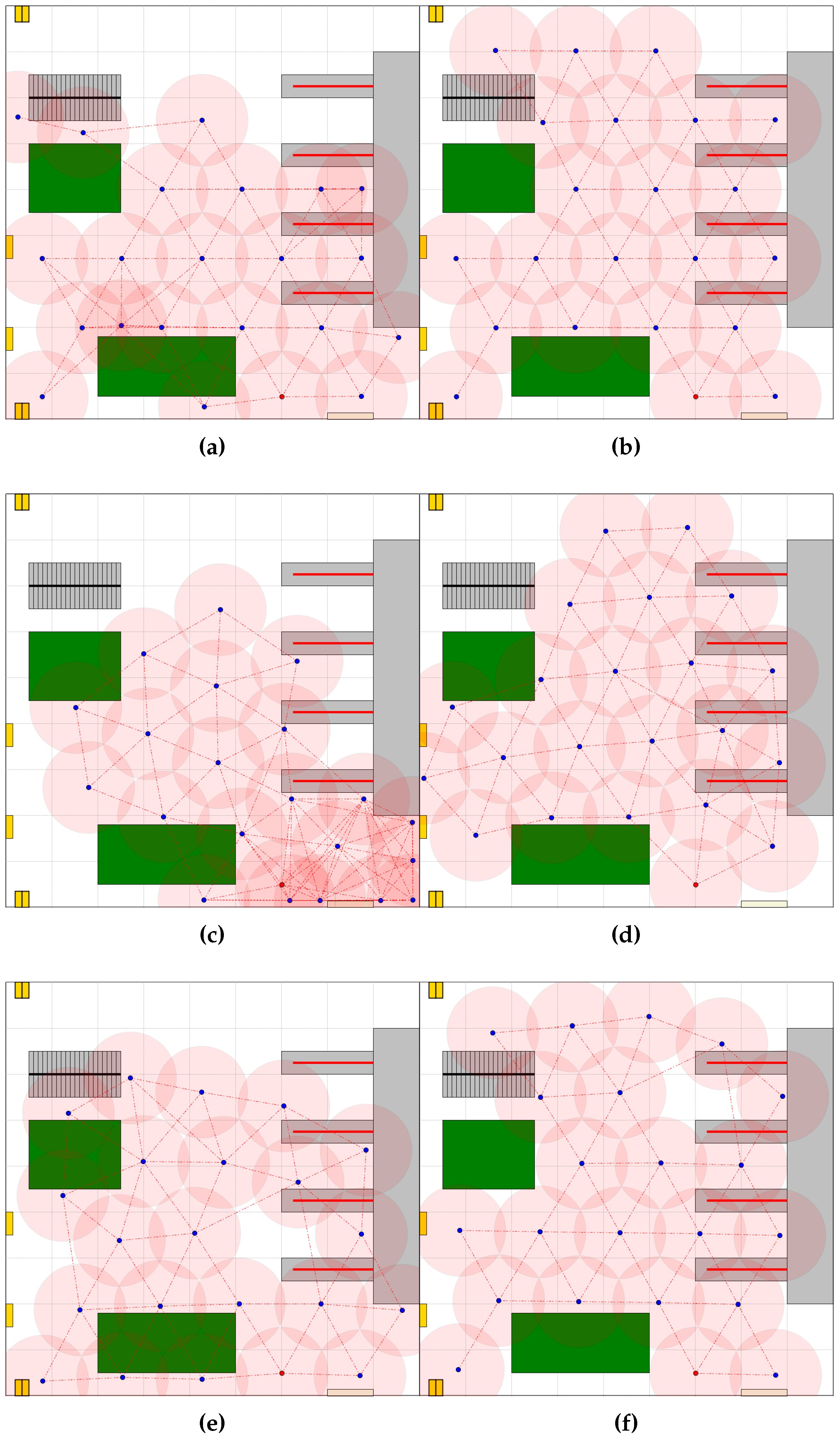
4.2.1. Pre-Defined Deployment
- Variant A: unknown map of W (unknown locations of obstacles).
- Variant B: known map of W (full knowledge about all obstacles is provided).
4.2.2. Self-Organizing Deployment
- Variant A:
- Variant B:
4.2.3. Hybrid Deployment
- Hybrid 1:
- concentration of nodes in a given subregion and switching into self-organizing deployment.
- Hybrid 2:
- improvement of combining pre-defined deployment using the self-organizing capabilities of sensing devices.
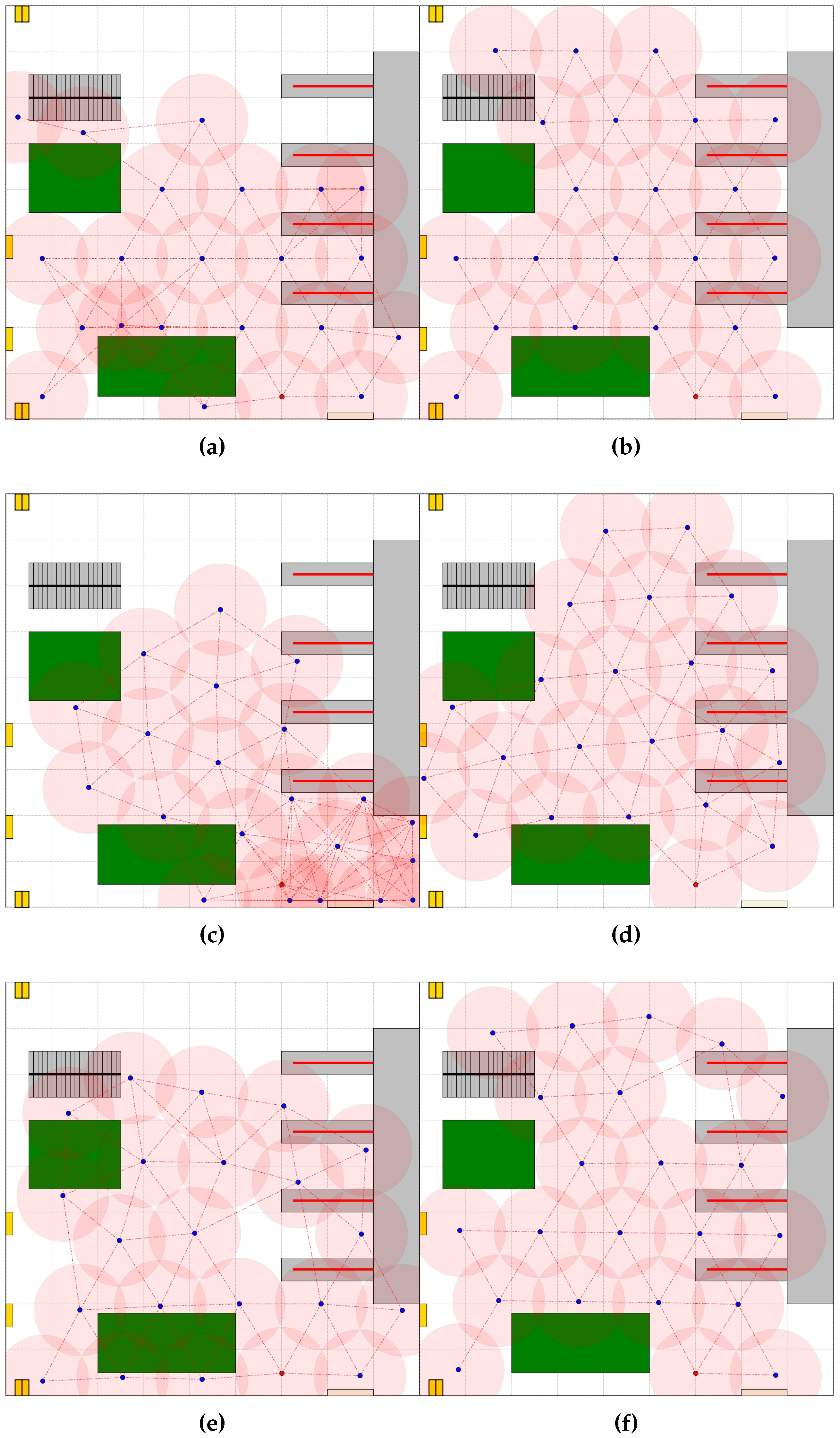
5. Case Study Results
5.1. Simulation Setup
5.2. Scenario 1: Indoor Environment Monitoring
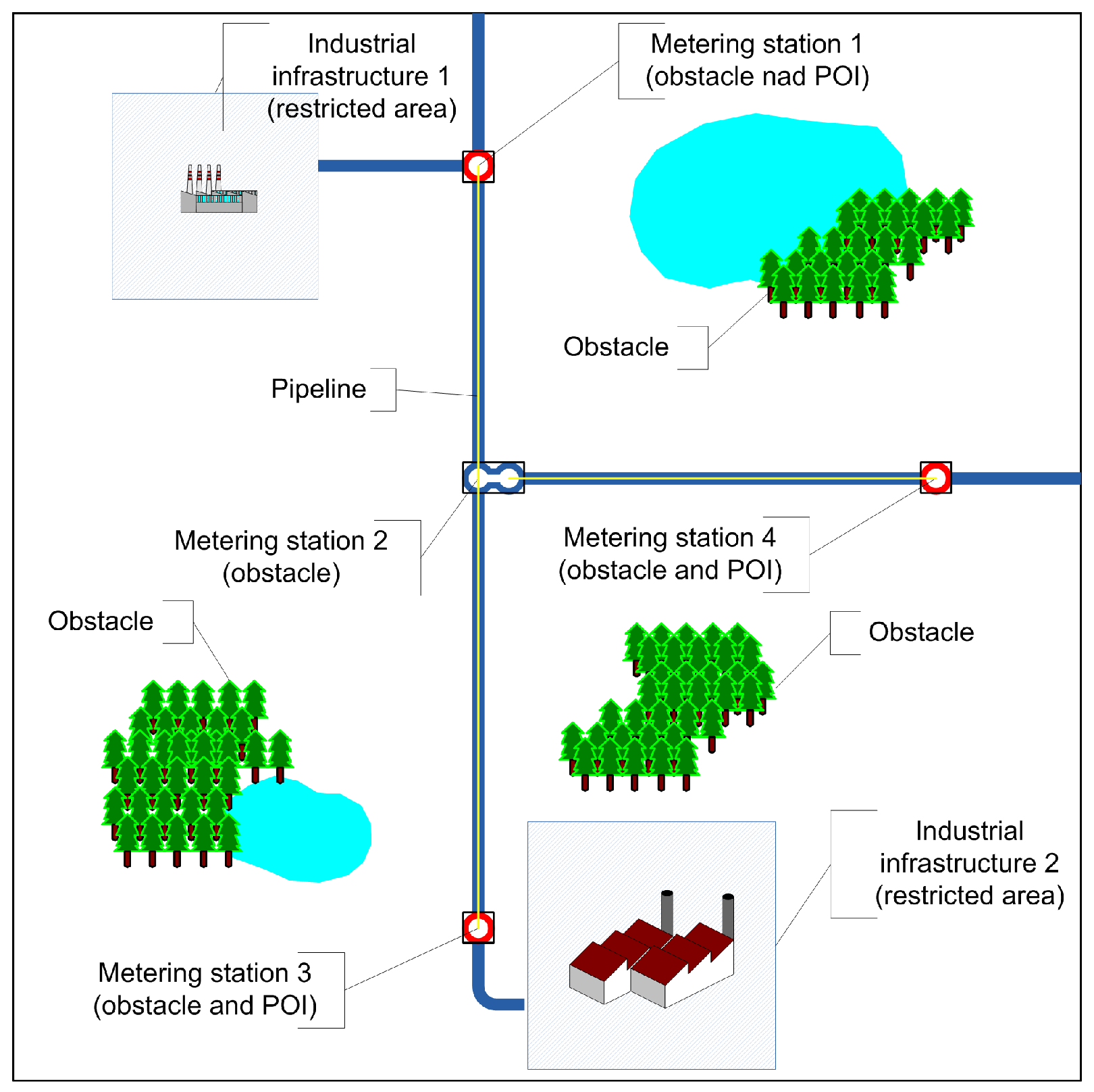
5.3. Scenario 2: Outdoor Environment Monitoring
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Deployment analysis in underwater acoustic wireless sensor networks. In Proceedings of the 1st ACM international workshop on Underwater networks, Los Angeles, CA, USA, 29 September 2006.
- Ramadan, R.; El-Rewini, H.; Abdelghany, K. Optimal and approximate approaches for deployment of heterogeneous sensing devices. EURASIP J. Wirel. Commun. Netw. 2007, 1, 1–14. [Google Scholar] [CrossRef]
- Chang, C.; Chang, H.; Hsieh, C.; Chang, C. Ofrd: Obstacle-free robot deployment algorithms for wireless sensor networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4371–4376.
- Fletcher, G.; Li, X.; Nayak, A.; Stojmenovic, I. Back-tracking based sensor deployment by a robot team. In Proceedings of the 7th Annual IEEE Communications Society Conference on Sensor Mesh and Ad Hoc Communications and Networks, Boston, MA, USA, 21–25 June 2010; pp. 1–9.
- Garcia-Sanchez, A.; Garcia-Sanchez, F.; Losilla, F.; Kulakowski, P.; Garcio-Haro, J.; Rodrguez, A.; Lopez-Bao, J.; Palomares, F. Wireless sensor network deployment for monitoring wildlife passages. Sensors 2010, 10, 7236–7262. [Google Scholar] [CrossRef] [PubMed]
- Tuna, G.; Gungor, V.; Gulez, K. An autonomous wireless sensor network deployment system using mobile robots for human existence detection in case of disasters. Ad Hoc Netw. 2014, 13, 54–68. [Google Scholar] [CrossRef]
- Senouci, M.R.; Mellouk, A.; Aissani, A. Random deployment of wireless sensor networks: A survey and approach. Int. J. Ad Hoc Ubiquitous Comput. 2014, 15, 133–146. [Google Scholar] [CrossRef]
- Vales-Alonso, J.; Parrado-Garcia, F.; Lopez-Matencio, P.; Alcaraz, J.; Gonzalez-Castano, F. On the optimal random deployment of wireless sensor networks in non-homogeneous scenarios. Ad Hoc Netw. 2013, 11, 846–860. [Google Scholar] [CrossRef]
- Rout, M.; Roy, R. Dynamic deployment of randomly deployed mobile sensor nodes in the presence of obstacles. Ad Hoc Netw. 2016, 46, 12–22. [Google Scholar] [CrossRef]
- Patan, M. Optimal Sensor Networks Scheduling in Identification of Distributed Parameters; Springer-Verlag: Heidenberg, Germany, 2012. [Google Scholar]
- Marks, M.; Niewiadomska-Szynkiewicz, E.; Kolodziej, J. High performance wireless sensor network localization system. Int. J. Ad Hoc Ubiquitous Comput. 2014, 17, 122–133. [Google Scholar] [CrossRef]
- Marks, M.; Niewiadomska-Szynkiewicz, E.; Kolodziej, J. An integrated software framework for localization in wireless sensor network. Comput. Inform. 2014, 33, 369–386. [Google Scholar]
- Kasprzak, W.; Szynkiewicz, W.; Karolczak, M. Global colour image features for discrete self-localization of an indoor vehicle. In Computer Analysis of Images and Patterns (CAIP); ser. LNCS; Springer: Heidelberg, Germany, 2005; Volume 3691, pp. 620–627. [Google Scholar]
- Basagni, S.; Conti, M.; Giordano, S.; Stojmenovic, I. Mobile Ad Hoc Networking; IEEE Press: New York, NY, USA, 2004. [Google Scholar]
- Bai, F.; Helmy, A. A Survey of Mobility Models in Wireless Ad hoc Networks. In CiteSeerX—Scientific Literature Digital Library and Search Engine (United States); Pennsylvania University: Philadelphia, PA, USA, 2006. [Google Scholar]
- Musolesi, M.; Mascolo, C. Mobility Models for Systems Evaluation. A Survey. In State of the Art on Middleware for Network Eccentric and Mobile Applications (MINEMA); Springer: Heidelberg, Germany, 2009. [Google Scholar]
- Camp, T.; Boleng, J.; Davies, V. A Survey of Mobility Models for Ad Hoc Network Research. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Roy, R. Handbook of Mobile Ad Hoc Networks for Mobility Models; Springer: New York, NY, USA, 2010. [Google Scholar]
- Choset, H.; Lynch, K.M.; Hutchinson, S.; Kantor, G.; Burgard, W.; Kavraki, L.; Thrun, S. Principles of Robot Motion: Theory, Algorithms, and Implementations; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Kasprzak, W.; Szynkiewicz, W.; Zlatanov, D.; Zielinska, T. A hierarchical csp search for path planning of cooperating self-reconfigurable mobile fixtures. Eng. Appl. Artif. Intell. 2014, 34, 85–98. [Google Scholar] [CrossRef]
- Nayak, A.; Stojmenovic, I. Wireless Sensor and Actuator Networks: Algorithms and Protocols for Scalable Coordination and Data Communication; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Younis, M.F.; Akkaya, K. Strategies and techniques for node placement in wireless sensor networks: A survey. Ad Hoc Netw. 2008, 6, 621–655. [Google Scholar] [CrossRef]
- Ucinski, D.; Patan, M. Sensor network design for the estimation of spatially distributed processes. Int. J. Appl. Math. Comput. Sci. 2010, 20, 459–481. [Google Scholar] [CrossRef]
- Li, X.; Frey, H.; Santoro, N.; Stojmenovic, I. Strictly localized sensor self-deployment for optimal focused coverage. IEEE Trans. Mob. Comput. 2011, 10, 1520–1533. [Google Scholar] [CrossRef]
- Santi, P. Topology Control in Wireless Ad Hoc and Sensor Networks; Wiley: Chichester, UK, 2005. [Google Scholar]
- Niewiadomska-Szynkiewicz, E.; Sikora, A.; Kolodziej, J. Modeling mobility in cooperative ad hoc networks. Mob. Netw. Appl. 2013, 18, 610–621. [Google Scholar] [CrossRef]
- Papadopoulos, G.Z.; Kritsis, K.; Gallais, A.; Chatzimisios, P.; Noel, T. Performance evaluation methods in ad hoc and wireless sensor networks: A literature study. IEEE Commun. Mag. 2016, 54, 122–128. [Google Scholar] [CrossRef]
- Gallais, A.; Carle, J.; Simplot-Ryl, D.; Stojmenovic, I. Localized sensor area coverage with low communication overhead. IEEE Trans. Mob. Comput. 2008, 7, 661–672. [Google Scholar] [CrossRef]
- Mišić, J.; Shafi, S.; Mišić, V. The impact of MAC parameters on the performance of 802.15.4 PAN. Ad Hoc Netw. 2005, 3, 509–528. [Google Scholar] [CrossRef]
- IEEE 802.15 Working Group. IEEE Standard for Low-Rate Wireless Personal Area Networks (WPANs). In IEEE Std 802.15.4-2015 (Revision of IEEE Std. 802.15.4-2011); Available online: http://standards.ieee.org/about/get/802/802.15.html (accessed on 6 September 2016).
- Watteyne, T.; Adjih, C.; Vilajosana, X. Lessons learned from large-scale dense IEEE802.15.4 connectivity traces. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Gothenburg, Sweden, 24–28 August 2015; pp. 145–150.
- Singh, S. Liquid Crystals: Fundamentals; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2002. [Google Scholar]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Ns-3 Network Simulator. Available online: https://www.nsnam.org/ (accessed on 6 September 2016).
- TOSSIM Simulator. Available online: http://tinyos.stanford.edu/tinyos-wiki/index.php/TOSSIM (accessed on 6 September 2016).
- Cooja Simulator. Available online: http://anrg.usc.edu/contiki/index.php/Cooja_Simulator (accessed on 6 September 2016).
- V-Rep: Virtual Robot Experimental Platform. Available online: www.coppeliarobotics.com (accessed on 6 September 2016).
- Niewiadomska-Szynkiewicz, E.; Sikora, A. A software tool for federated simulation of wireless sensor networks and mobile ad hoc networks. In Applied Parallel and Scientific Computing; ser. LNCS; Springer: Heidelberg, Germany, 2012; Volume 7133, pp. 303–313. [Google Scholar]
- Papadopoulos, G.Z.; Beaudaux, J.; Gallais, A.; Noel, T.; Schreiner, G. Adding value to wsn simulation using the iot-lab experimental platform. In Proceedings of the IEEE 9th International Conference on Wireless and Mobile Computing, Networking and Communications, Lyon, France, 7–9 October 2013; pp. 485–490.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
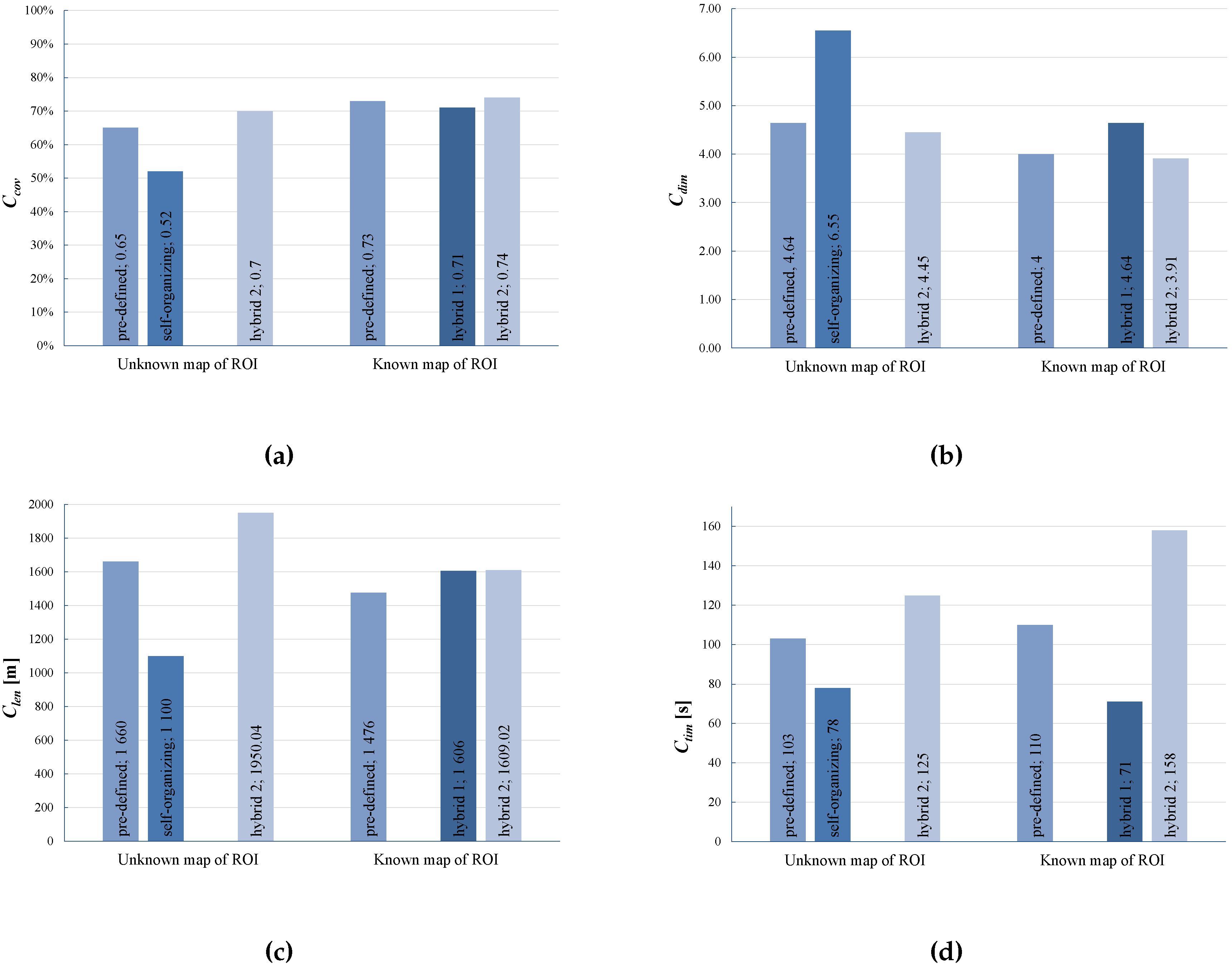
| Deployment Strategy | Unknown Map of ROI (Variant A) | Known Map of ROI (Variant B) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| pre-defined | 65 | 0 | 4.64 | 1659.55 | 103 | 73 | 0 | 4.00 | 1475.60 | 110 |
| self-organizing | 52 | 0 | 6.55 | 1099.57 | 78 | - | - | - | - | - |
| Hybrid 1 | - | - | - | - | - | 71 | 0 | 4.64 | 1605.58 | 71 |
| Hybrid 2 | 70 | 0 | 4.45 | 1950.04 | 125 | 74 | 0 | 3.91 | 1609.02 | 158 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niewiadomska-Szynkiewicz, E.; Sikora, A.; Marks, M. A Movement-Assisted Deployment of Collaborating Autonomous Sensors for Indoor and Outdoor Environment Monitoring. Sensors 2016, 16, 1497. https://doi.org/10.3390/s16091497
Niewiadomska-Szynkiewicz E, Sikora A, Marks M. A Movement-Assisted Deployment of Collaborating Autonomous Sensors for Indoor and Outdoor Environment Monitoring. Sensors. 2016; 16(9):1497. https://doi.org/10.3390/s16091497
Chicago/Turabian StyleNiewiadomska-Szynkiewicz, Ewa, Andrzej Sikora, and Michał Marks. 2016. "A Movement-Assisted Deployment of Collaborating Autonomous Sensors for Indoor and Outdoor Environment Monitoring" Sensors 16, no. 9: 1497. https://doi.org/10.3390/s16091497
APA StyleNiewiadomska-Szynkiewicz, E., Sikora, A., & Marks, M. (2016). A Movement-Assisted Deployment of Collaborating Autonomous Sensors for Indoor and Outdoor Environment Monitoring. Sensors, 16(9), 1497. https://doi.org/10.3390/s16091497