
Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops


 ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
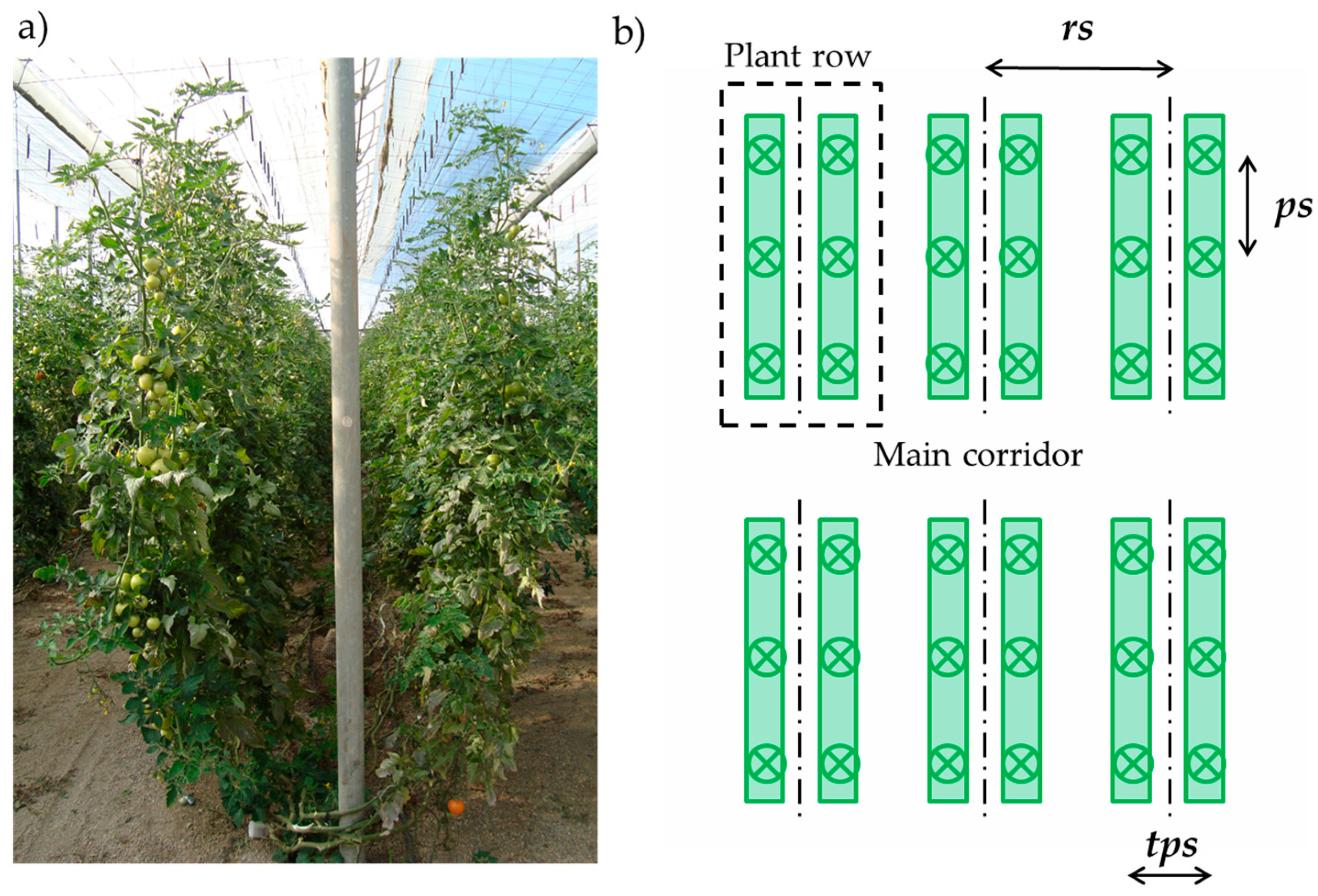
2.1. Experimental Fields
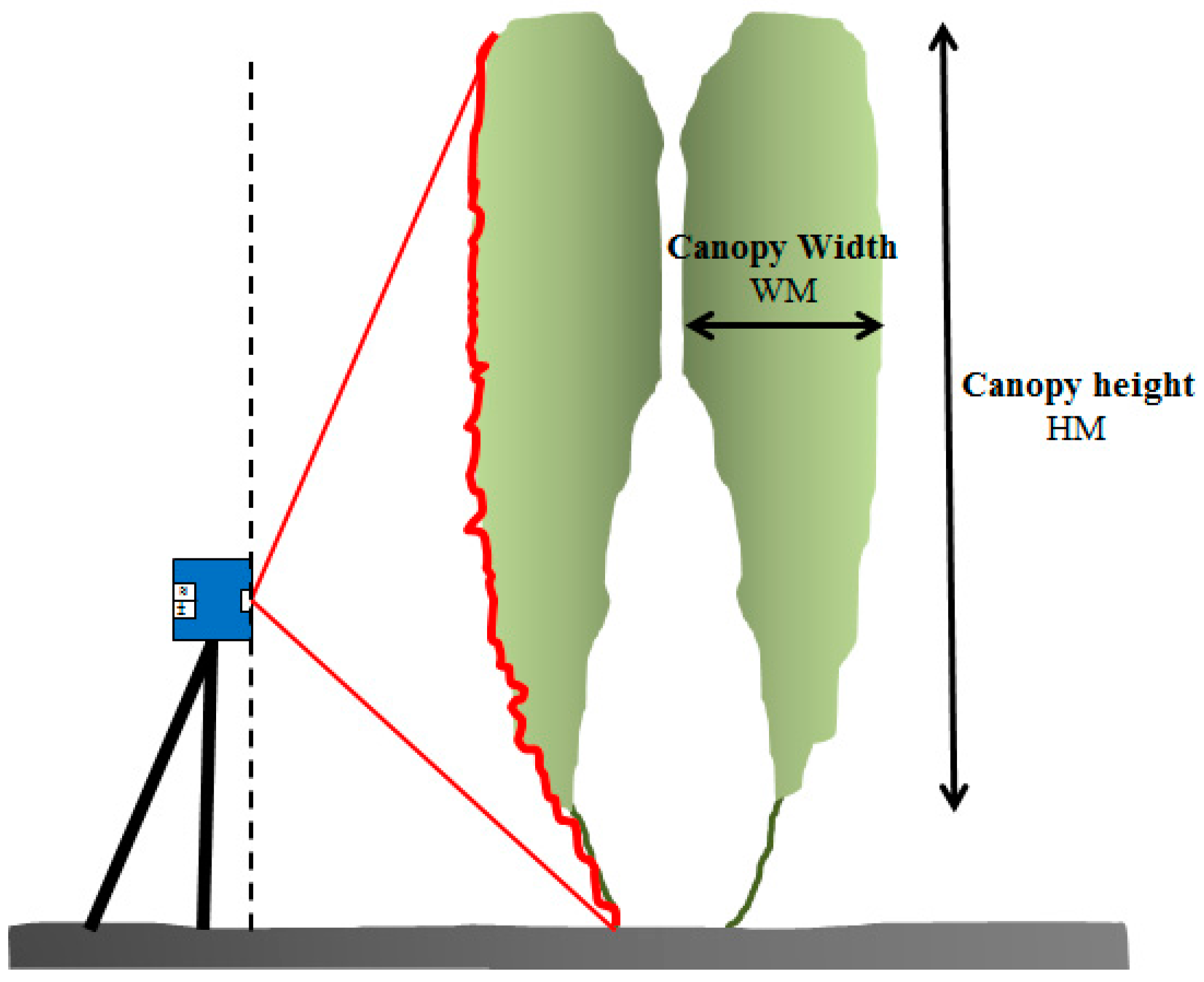
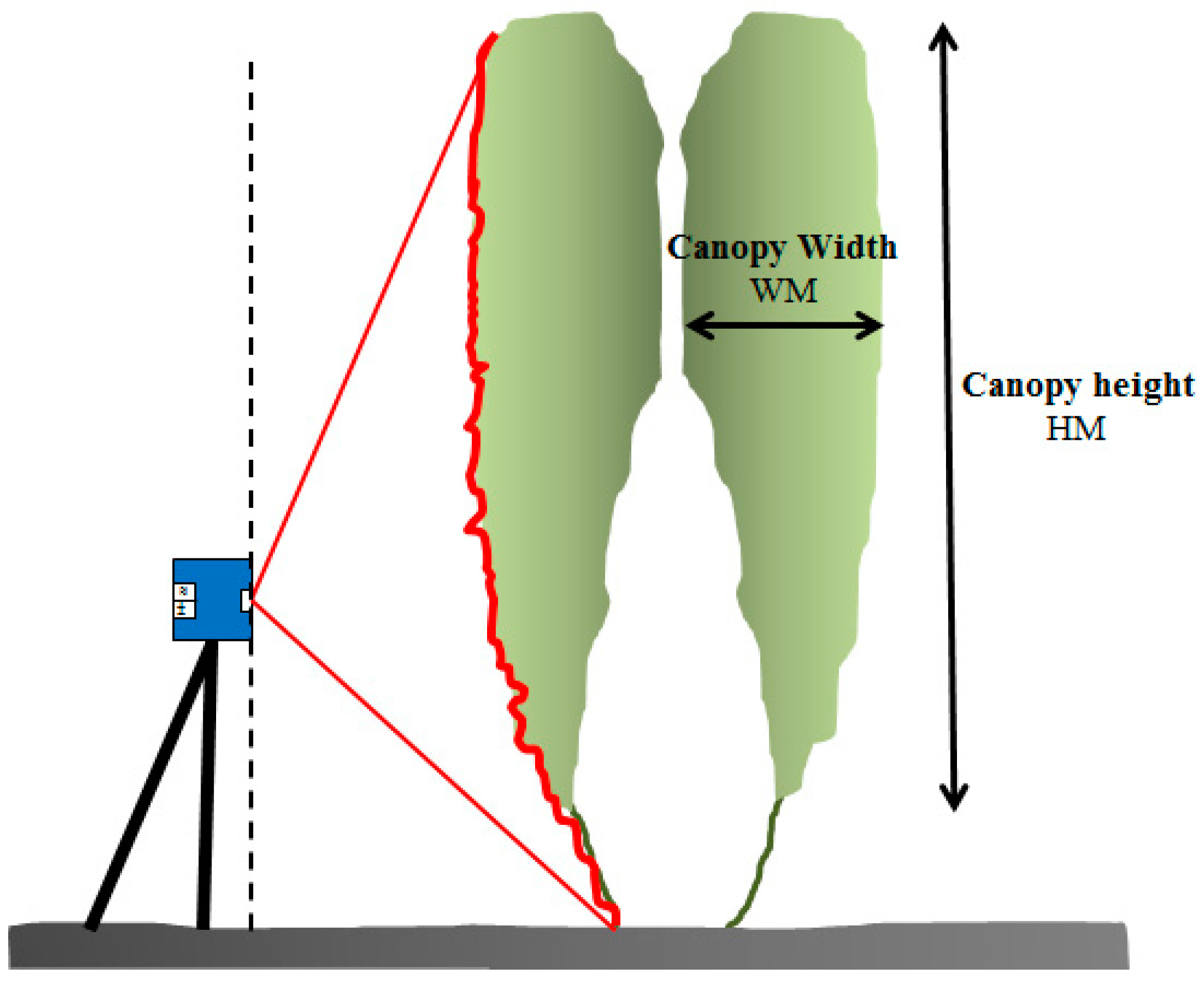
2.2. Manual Canopy Characterization
2.3. LiDAR Canopy Characterization
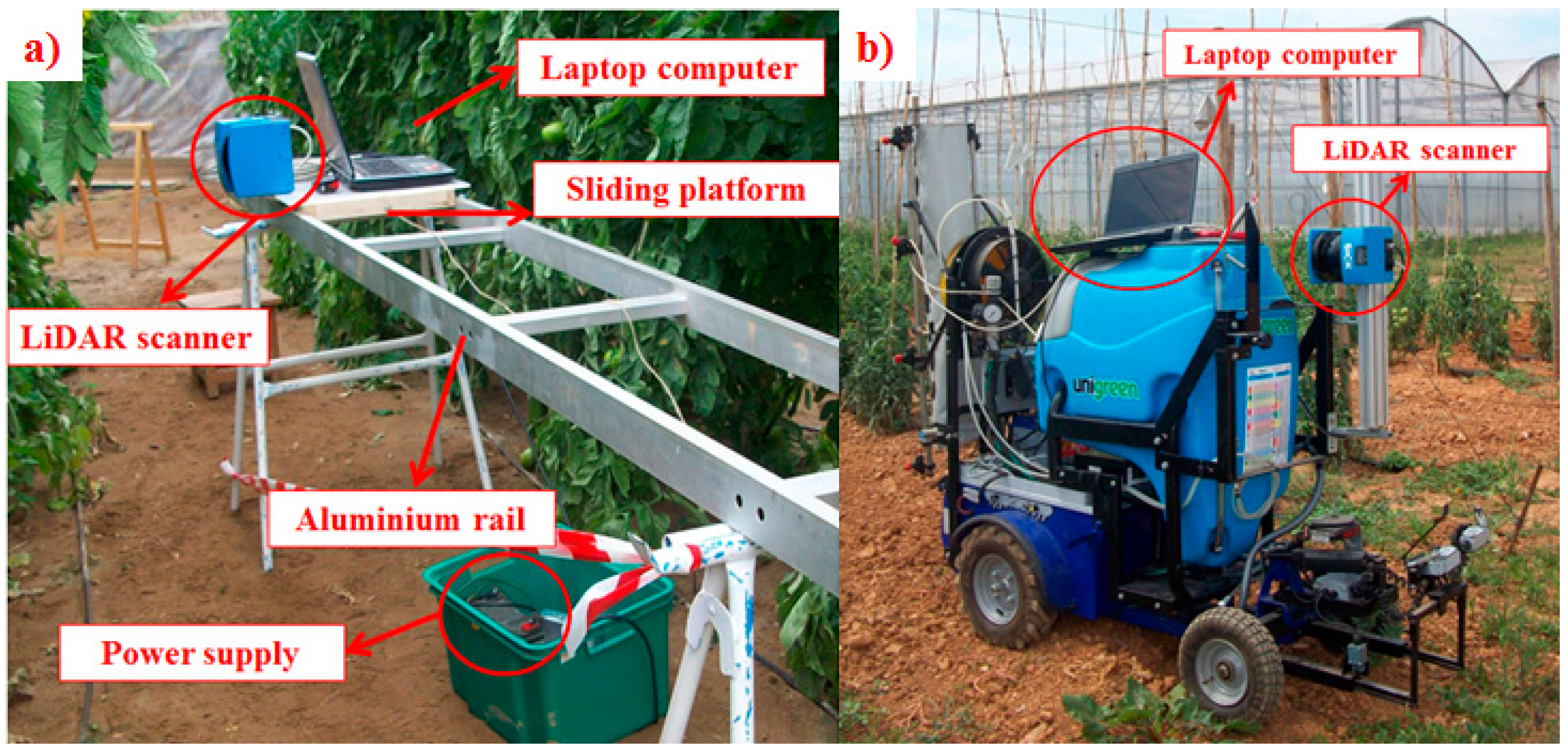
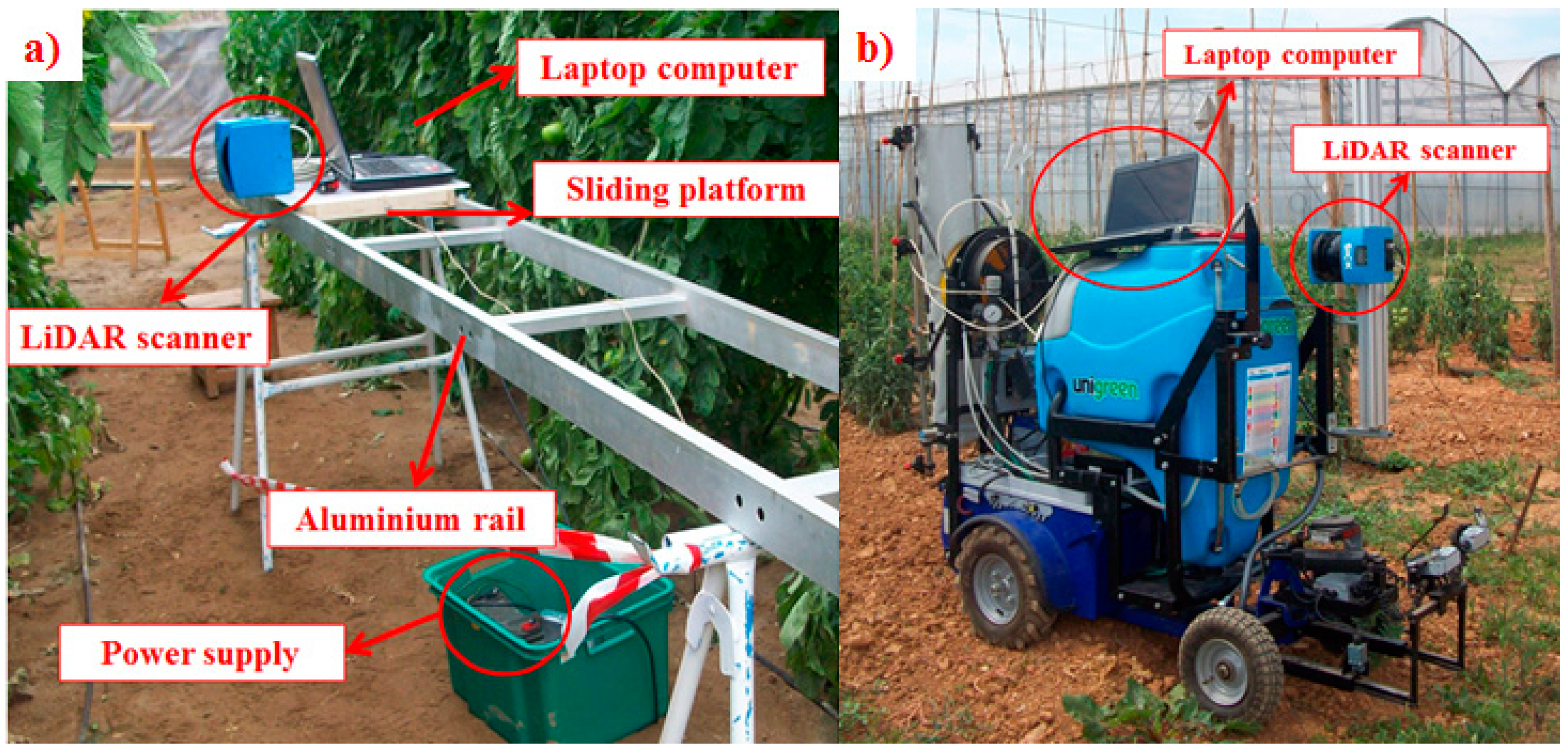
2.3.1. Canopy Scanning
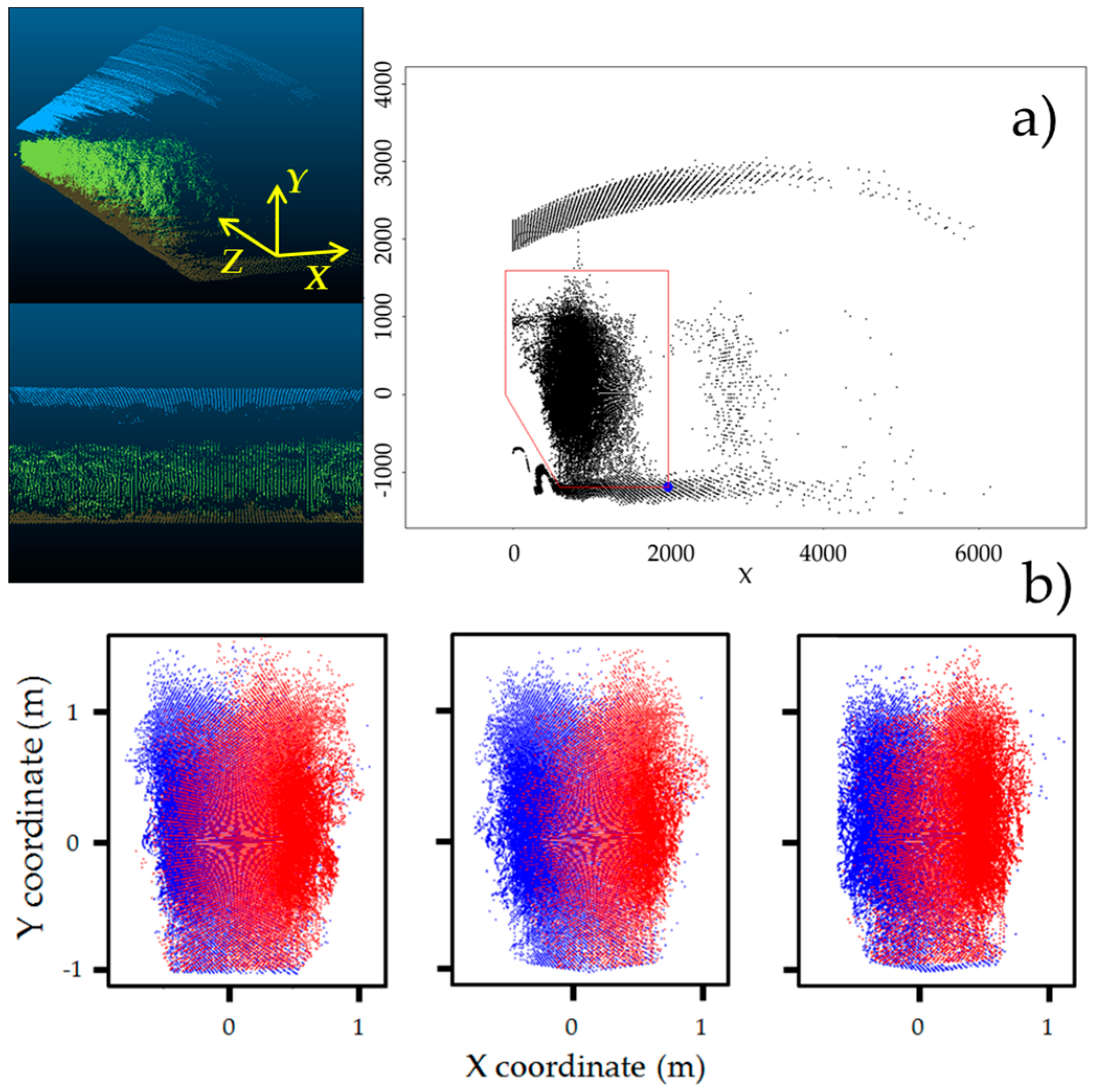
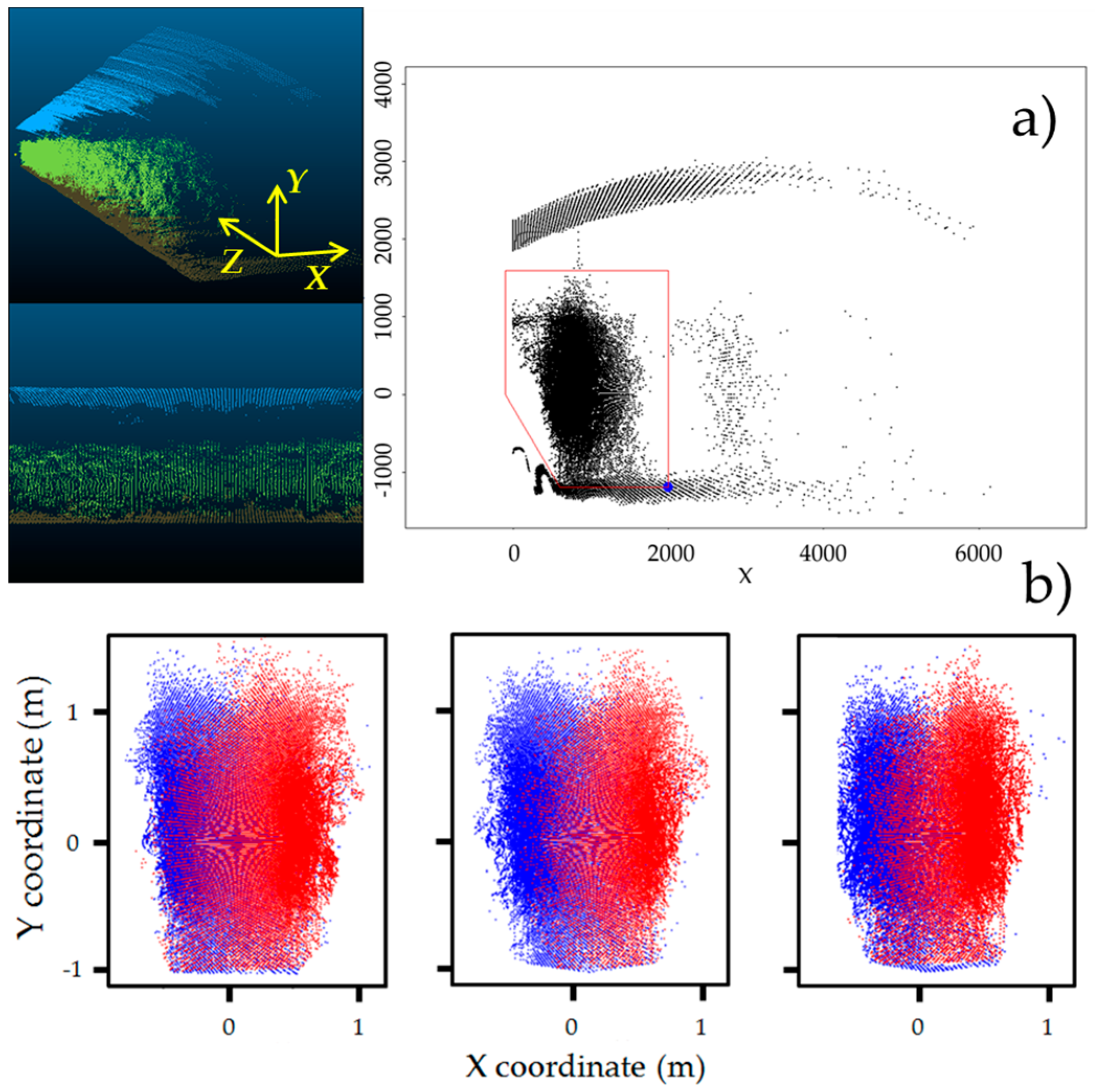
2.3.2. Data Processing
2.4. Statistical Analysis
3. Results
3.1. Canopy Characterization Parameters
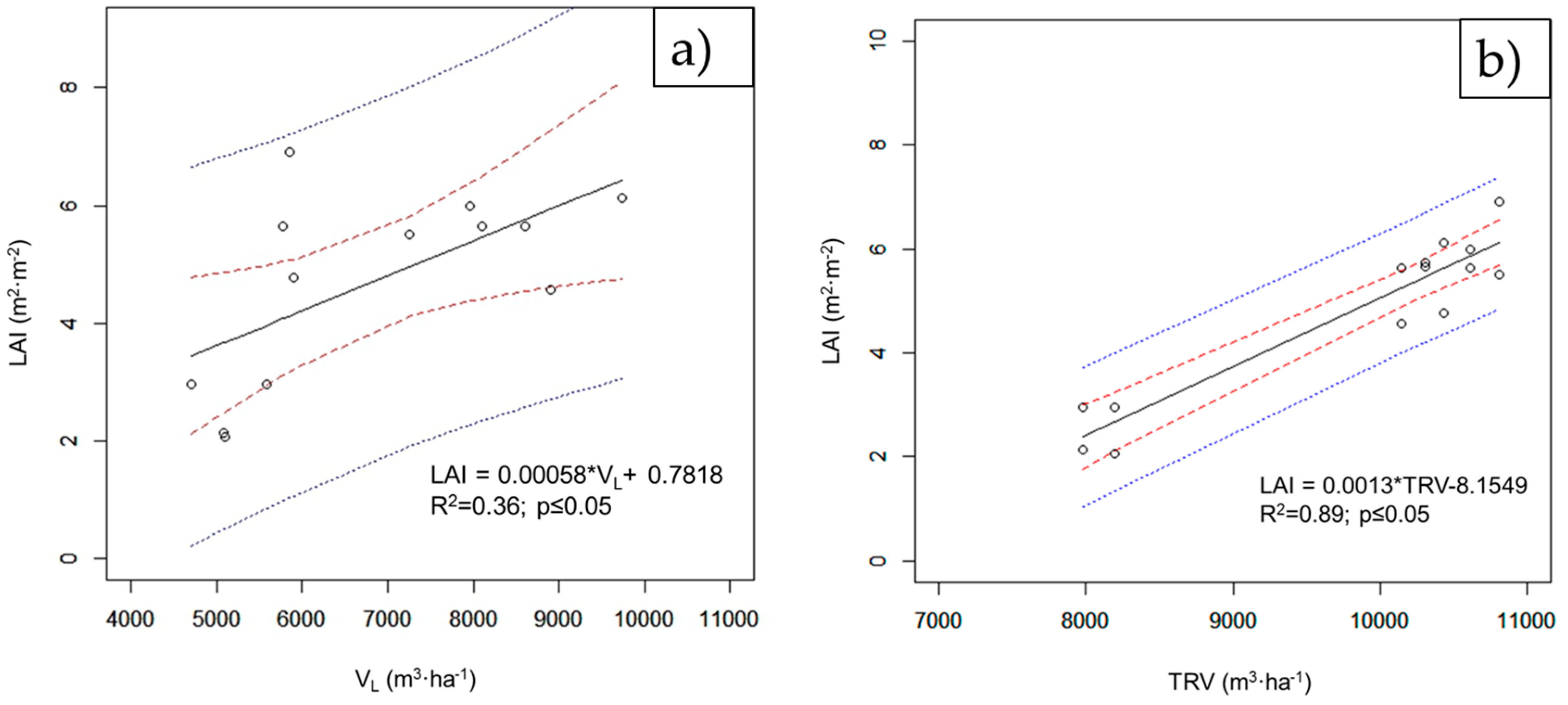
3.2. Correlations among Parameters Obtained with Manual and Electronic Methodologies
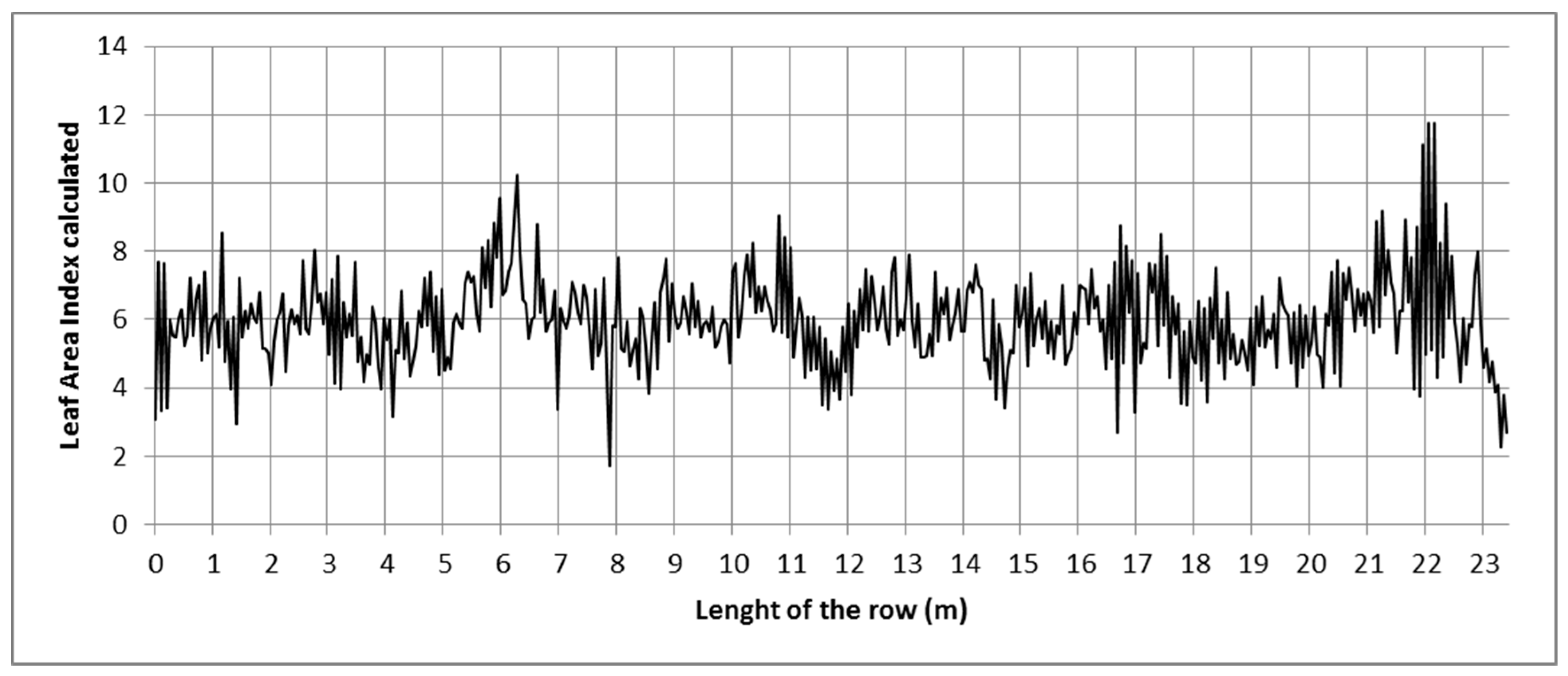
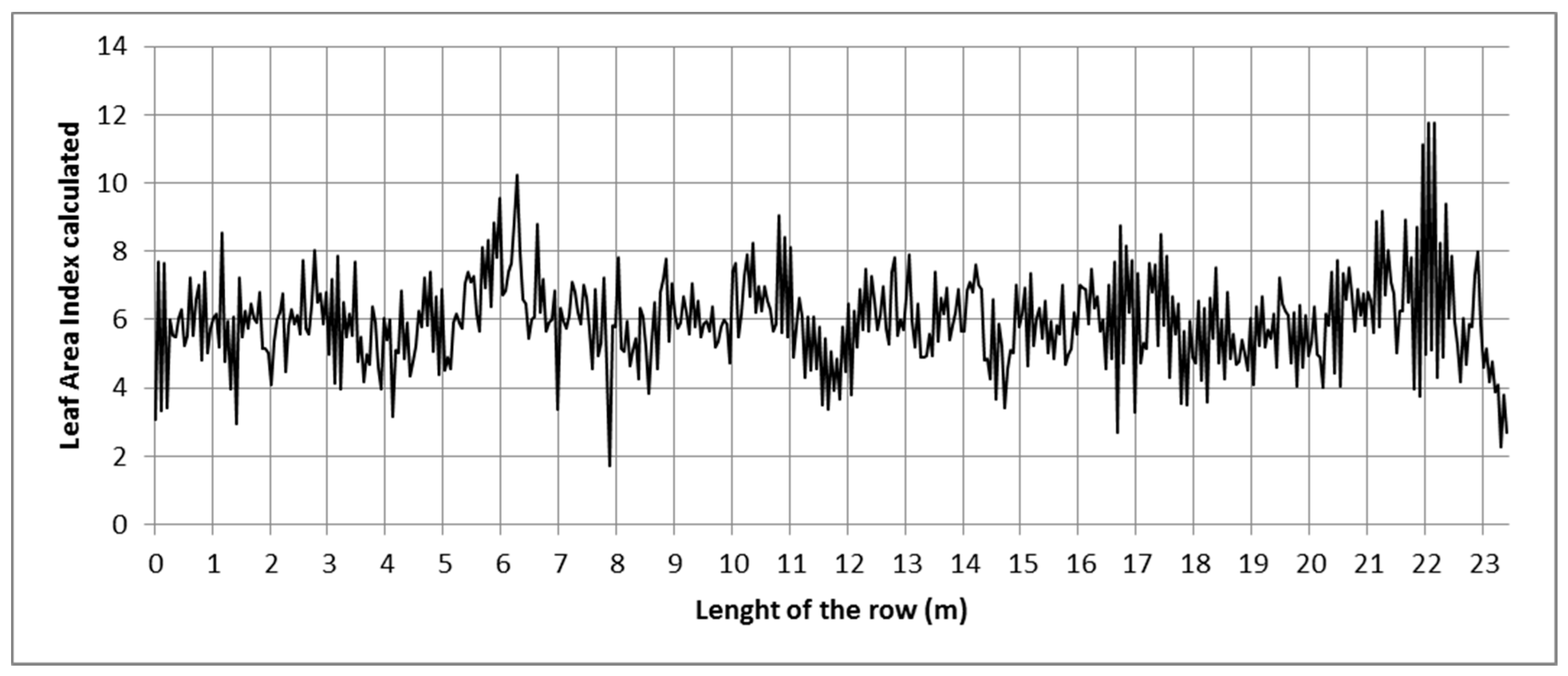
3.3. Canopy Characterization Along a Row Based on LiDAR Scanner Measurements
4. Discussion
5. Conclusions
- The LiDAR scanner underestimates certain manual values, but this can be due to the inherent higher resolution (larger number of point measurements) when compared with manual methodology.
- Volume parameters, such as the TRV and LWA, can be estimated with the laser scanner with a high statistical significance and high determination coefficients. This is very important to satisfy the new requirements for dose harmonization according to these parameters in the European Union to ensure the most optimal dose rate adjustments.
- LAI can be estimated by the sensor from the calculated height or volume, but not from the number of impacts per hedgerow length unit, as expected. Further improvements in the laser scanning process could improve this estimation.
- Canopy variations along a single row are very important to determine the exact input needed in each part of the field, and therefore, manual methods are unsuitable because of their low longitudinal resolution. LiDAR scanners can adapt to this variability and hence are an appropriate alternative for generating canopy density maps.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- European Parliament. European Directive 2009/128/EC for the Sustainable Use of Pesticides; European Parliament: Brussels, Belgium, 2009; pp. 71–86. [Google Scholar]
- MAGRAMA. Encuesta Sobre Superficies y Rendimientos de Cultivos; MAGRAMA: Madrid, Spain, 2013.
- Lozowicka, B. Health risk for children and adults consuming apples with pesticide residue. Sci. Total Environ. 2015, 502, 184–198. [Google Scholar] [CrossRef] [PubMed]
- Sánchez-Hermosilla, J.; Páez, F.; Rincón, V.J.; Pérez-Alonso, J. Volume application rate adapted to the canopy size in greenhouse tomato crops. Sci. Agricola 2013, 70, 390–396. [Google Scholar]
- Medina, R.; Sanchez-Hermosilla, J.; Gázquez, J.C. Deposition Analysis of Several Application Volumes of Pesticides Adapted to the Growth of a Greenhouse Tomato Crop. In Proceedings of the International Conference on Sustainable Greenhouse Systems (Greensys2004), Leuven, Belgium, 12–16 September 2005; pp. 179–186.
- Pergher, G.; Petris, R. Pesticide dose adjustment in vineyard spraying and potential for dose reduction. Agric. Eng. Int.: CIGR J. 2008, 10, 1–9. [Google Scholar]
- Byers, R.E.; Lyons, C.G.J.; Yoder, K.S.; Horsburgh, R.L.; Barden, J.A.; Donohue, S.J. Effect of apple tree size and canopy density on spray chemical deposit. Hortscience 1984, 19, 93–94. [Google Scholar]
- Sutton, T.B.; Unrath, C.R. Evaluation of the Tree-Row-Volume concept with density adjustments in relation to spray deposits in apple orchards. Plant Dis. 1984, 68, 480–484. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Llop, J.; Fàbregas, X.; Escolà, A.; Rosell-Polo, J.R. Variable rate sprayer. Part 2—Vineyard prototype: Design, implementation, and validation. Comput. Electron. Agric. 2013, 95, 136–150. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escola, A. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 2010, 29, 239–248. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Rodriguez-Lizana, A.; Cuenca, A.; Gil, E.; Blanco-Roldán, G.L.; Gil-Ribes, J.A. Assessing the optimal liquid volume to be sprayed on isolated olive trees according to their canopy volume. Sci. Total Environ. 2016, 568, 296–305. [Google Scholar] [CrossRef] [PubMed]
- Morgan, N.G. Minimizing pesticide waste in orchard spraying. Outlook Agric. 1981, 10, 342–344. [Google Scholar]
- EPPO. Dose expression for plant protection products. EPPO Bull. 2012, 42, 409–415. [Google Scholar]
- Walklate, P.J.; Cross, J.V. An examination of Leaf-Wall-Area dose expression. Crop Prot. 2012, 35, 132–134. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Landers, A.; Llop, J.; Giralt, L. Field validation of DOSAVIÑA, a decision support system to determine the optimal volume rate for pesticide application in vineyards. Eur. J. Agron. 2011, 35, 33–46. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A. Design of a decision support method to determine volume rate for vineyard spraying. Appl. Eng. Agric. 2009, 25, 145–152. [Google Scholar] [CrossRef]
- Walklate, P.J.; Cross, J.V.; Pergher, G. Support system for efficient dosage of orchard and vineyard spraying products. Comput. Electron. Agric. 2011, 75, 355–362. [Google Scholar] [CrossRef]
- Walklate, P.J.; Cross, J.V.; Richardson, G.M.; Baker, D.E.; Murray, R.A. A generic method of pesticide dose expression: Application to broadcast spraying of apple trees. Ann. Appl. Biol. 2003, 143, 11–23. [Google Scholar] [CrossRef]
- Gamarra-Diezma, J.L.; Miranda-Fuentes, A.; Llorens, J.; Cuenca, A.; Blanco-Roldán, G.L.; Rodríguez-Lizana, A. Testing accuracy of long-range ultrasonic sensors for olive tree canopy measurements. Sensors 2015, 15, 2902–2919. [Google Scholar] [CrossRef] [PubMed]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [PubMed]
- Escolà, A.; Planas, S.; Rosell, J.; Pomar, J.; Camp, F.; Solanelles, F.; Gracia, F.; Llorens, J.; Gil, E. Performance of an ultrasonic ranging sensor in apple tree canopies. Sensors 2011, 11, 2459–2477. [Google Scholar] [CrossRef] [PubMed]
- Andersen, H.; Reng, L.; Kirk, K. Geometric plant properties by relaxed stereo vision using simulated annealing. Comput. Electron. Agric. 2005, 49, 219–232. [Google Scholar] [CrossRef]
- Sinoquet, H.; Sonohat, G.; Phattaralerphong, J.; Godin, C. Foliage randomness and light interception in 3-D digitized trees: An analysis from multiscale discretization of the canopy. Plant Cell Environ. 2005, 28, 1158–1170. [Google Scholar] [CrossRef]
- Sanz-Cortiella, R.; Llorens-Calveras, J.; Escolà, A.; Arno-Satorra, J.; Ribes-Dasi, M.; Masip-Vilalta, J.; Camp, F.; Gracia-Aguila, F.; Solanelles-Batlle, F.; Planas-DeMarti, S.; et al. Innovative LIDAR 3D dynamic measurement system to estimate fruit-tree leaf area. Sensors 2011, 11, 5769–5791. [Google Scholar] [CrossRef] [PubMed]
- Gil, E.; Llorens, J.; Llop, J.; Fàbregas, X.; Gallart, M. Use of a terrestrial LIDAR sensor for drift detection in vineyard spraying. Sensors 2013, 13, 516–534. [Google Scholar] [CrossRef] [PubMed]
- Méndez, V.; Catalán, H.; Rosell-Polo, J.R.; Arnó, J.; Sanz, R. LiDAR simulation in modelled orchards to optimise the use of terrestrial laser scanners and derived vegetative measures. Biosyst. Eng. 2013, 115, 7–19. [Google Scholar] [CrossRef]
- Jensen, J.L.R.; Humes, K.S.; Hudak, A.T.; Vierling, L.A.; Delmelle, E. Evaluation of the MODIS LAI product using independent lidar-derived LAI: A case study in mixed conifer forest. Remote Sens. Environ. 2011, 115, 3625–3639. [Google Scholar] [CrossRef]
- Rosell-Polo, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef]
- Yang, X.; Strahler, A.H.; Schaaf, C.B.; Jupp, D.L.B.; Yao, T.; Zhao, F.; Wang, Z.; Culvenor, D.S.; Newnham, G.J.; Lovell, J.L.; et al. Three-dimensional forest reconstruction and structural parameter retrievals using a terrestrial full-waveform lidar instrument (Echidna®). Remote Sens. Environ. 2013, 135, 36–51. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Gil, E.; Arnó, J.; Llorens, J.; Sanz, R.; Llop, J.; Rosell-Polo, J.; Gallart, M.; Escolà, A. Advanced technologies for the improvement of spray application techniques in spanish viticulture: An overview. Sensors 2014, 14, 691–708. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.-H.; Ehsani, R. Comparison of two 2D laser scanners for sensing object distances, shapes, and surface patterns. Comput. Electron. Agric. 2008, 60, 250–262. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A.; Rosell, J.R.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef]
- Llop, J.; Gil, E.; Llorens, J.; Gallart, M.; Balsari, P. Influence of air-assistance on spray application for tomato plants in greenhouses. Crop Prot. 2015, 78, 293–301. [Google Scholar] [CrossRef]
- Siegfried, W.; Viret, O.; Huber, B.; Wohlhauser, R. Dosage of plant protection products adapted to leaf area index in viticulture. Crop Prot. 2007, 26, 73–82. [Google Scholar] [CrossRef]
- Weisser, P.; Koch, H. Expression of dose rate with respect to orchard sprayer function. Asp. Appl. Biol. 2002, 66, 353–358. [Google Scholar]
- Gil, E.; Gallart, M.; Llorens, J.; Llop, J.; Bayer, T.; Carvalho, C. Spray adjustments based on LWA concept in vineyard. Relationship between canopy and coverage for different application settings. Asp. Appl. Biol. 2014, 122, 25–32. [Google Scholar]
- Pergher, G.; Gubiani, R.; Tonetto, G. Foliar deposition and pesticide losses from three air-assisted sprayers in a hedgerow vineyard. Crop Prot. 1997, 16, 25–33. [Google Scholar] [CrossRef]
- Walklate, P.; Richardson, G.; Cross, J.; Murray, R. Relationship between orchard tree crop structure and performance characteristics of an axial fan sprayer. Asp. Appl. Biol. 2000, 57, 285–292. [Google Scholar]
- Miranda-Fuentes, A.; Llorens, J.; Gamarra-Diezma, J.; Gil-Ribes, J.; Gil, E. Towards an optimized method of olive tree crown volume measurement. Sensors 2015, 15, 3671–3687. [Google Scholar] [CrossRef] [PubMed]
- Balsari, P.; Oggero, G.; Bozzer, C.; Marucco, P. An autonomous self-propelled sprayer for safer pesticide application in glasshouse. Asp. Appl. Biol. 2012, 114, 197–204. [Google Scholar]
- Xu, W.; Su, Z.; Feng, Z.; Xu, H.; Jiao, Y.; Yan, F. Comparison of conventional measurement and LiDAR-based measurement for crown structures. Comput. Electron. Agric. 2013, 98, 242–251. [Google Scholar] [CrossRef]
- Fernández-Sarría, A.; Martínez, L.; Velázquez-Martí, B.; Sajdak, M.; Estornell, J.; Recio, J.A. Different methodologies for calculating crown volumes of Platanus hispanica trees using terrestrial laser scanner and a comparison with classical dendrometric measurements. Comput. Electron. Agric. 2013, 90, 176–185. [Google Scholar] [CrossRef]
- Shapiro, S.S.; Wilk, M.B. An analysis of variance test for normality (Complete samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]
- Razali, N.M.; Wah, Y.B. Power comparisons of Shapiro-Wilk, Kolmogorov-Smirnov, Lilliefors and Anderson-Darling tests. J. Stat. Model. Anal. 2011, 2, 21–33. [Google Scholar]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arnó, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef]
- Tumbo, S.D.; Salyani, M.; Whitney, J.D.; Wheaton, T.A.; Miller, W.M. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric. 2002, 18, 367–372. [Google Scholar] [CrossRef]
- Escolà, A.; Camp, F.; Solanelles, F.; Planas, S.; Gracia, F.; Rosell, J.R.; Gil, E.; Val, L. Spray application volume test in apple and pear orchards in Catalonia (Spain) and Variable Rate Technology for dose adjustment. In Proceedings of the 2006 ASABE Annual International Meeting, Portland, OR, USA, 9–12 July 2006.
- Escolà, A.; Rosell-Polo, J.R.; Planas, S.; Gil, E.; Pomar, J.; Camp, F.; Llorens, J.; Solanelles, F. Variable rate sprayer. Part 1—Orchard prototype: Design, implementation and validation. Comput. Electron. Agric. 2013, 95, 122–135. [Google Scholar] [CrossRef]
- Balsari, P.; Doruchowski, G.; Marucco, P.; Tamagnone, M.; Van de Zande, J.; Wenneker, M. A system for adjusting the spray application to the target characteristics. Agric. Eng. Int. CIGR J. 2008, X, 1–11. [Google Scholar]
- Sanz, R.; Rosell, J.R.; Llorens, J.; Gil, E.; Planas, S. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D dynamic measurement system. Agric. For. Meteorol. 2013, 171–172, 153–162. [Google Scholar] [CrossRef]
- Chen, Y.; Ozkan, H.E.; Zhu, H.; Derksen, R.C.; Krause, C.R. Spray Deposition inside tree canopies from a newly developed variable-rate air-assisted sprayer. Trans. ASABE 2013, 56, 1263–1272. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Greenhouse ID | Location | Plant Layout (Row Spacing × Plant Spacing) (m × m) | Crop | BBCH Scale |
|---|---|---|---|---|
| GH 1 | El Ejido (Almería) | 2.5 × 0.4 | Solanum lycopersicum L. cv. Velasco | 79 |
| GH 2 | El Ejido (Almería) | 2.8 × 0.4 | Solanum lycopersicum L. cv. Velasco | 79 |
| GH 3 | Viladecans (Barcelona) | 2.0 × 0.4 | Solanum lycopersicum L. cv. Barbastro | 76 |
| Parameter | Greenhouse ID | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | |||
| Manual characterization | Manual Height | HM (m) | 2.19 ± 0.02 | 2.50 ± 0.02 | 1.96 ± 0.04 |
| Manual Width | WM (m) | 0.62 ± 0.02 | 0.43 ± 0.04 | 0.53 ± 0.01 | |
| Tree Row Volume | TRV (m3·ha−1) | 10,882 ± 397 | 7711 ± 212 | 10,397 ± 252 | |
| Leaf Wall Area | LWA (m2·ha−1) | 35,111 ± 360 | 35,683 ± 290 | 39,170 ± 755 | |
| Leaf Area Density | LAD (m2·m−3) | 5.81 ± 0.28 | 3.15 ± 0.15 | 5.30 ± 0.19 | |
| Electronic characterization | LiDAR Height | HL (m) | 1.90 ± 0.07 | 2.12 ± 0.01 | 1.93 ± 0.03 |
| LiDAR Width | WL (m) | 0.71 ± 0.02 | 0.64 ± 0.02 | 0.59 ± 0.03 | |
| LiDAR Volume | VL (m3) | 1.13 ± 0.07 | 1.32 ± 0.03 | 2.42 ± 0.12 | |
| Manual Measurements | LiDAR Measurements | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| HM | WM | LAI | TRV | LWA | LAD | IMP | HL | WL | VL | |||
| (m) | (m) | (m2·m−2) | (m3·ha−1) | (m2·ha−1) | (m2·m−3) | (m−1) | (m) | (m) | (m3) | |||
| Manual | HM | (m) | 1 | 0.29 ** | 0.60 ** | 0.50 ** | 0.21 * | 0.53 ** | 0.20 * | 0.59 ** | 0.003 | 0.69 ** |
| WM | (m) | 1 | 0.70 ** | 0.86 ** | 0.01 | 0.65 ** | 0.20 * | 0.52 ** | 0.10 | 0.16 | ||
| LAI | (m2·m−2) | 1 | 0.89 ** | 0.02 | 0.97 ** | 0.01 | 0.52 ** | 0.01 | 0.36 ** | |||
| TRV | (m3·ha−1) | 1 | 0.08 | 0.79 ** | 0.03 | 0.46 ** | 0.01 | 0.37 ** | ||||
| LWA | (m2·ha−1) | 1 | 0.01 | 0.51 ** | 0.004 | 0.29 ** | 0.33 ** | |||||
| LAD | (m2 m−3) | 1 | 0.01 | 0.47 ** | 0.01 | 0.32 ** | ||||||
| LiDAR | IMP | (m−1) | 1 | 0.0001 | 0.17 | 0.27 * | ||||||
| HL | (m) | 1 | 0.10 | 0.31 ** | ||||||||
| WL | (m) | 1 | 0.03 | |||||||||
| VL | (m3) | 1 | ||||||||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Llop, J.; Gil, E.; Llorens, J.; Miranda-Fuentes, A.; Gallart, M. Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops. Sensors 2016, 16, 1435. https://doi.org/10.3390/s16091435
Llop J, Gil E, Llorens J, Miranda-Fuentes A, Gallart M. Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops. Sensors. 2016; 16(9):1435. https://doi.org/10.3390/s16091435
Chicago/Turabian StyleLlop, Jordi, Emilio Gil, Jordi Llorens, Antonio Miranda-Fuentes, and Montserrat Gallart. 2016. "Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops" Sensors 16, no. 9: 1435. https://doi.org/10.3390/s16091435
APA StyleLlop, J., Gil, E., Llorens, J., Miranda-Fuentes, A., & Gallart, M. (2016). Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops. Sensors, 16(9), 1435. https://doi.org/10.3390/s16091435