
Target Capturing Control for Space Robots with Unknown Mass Properties: A Self-Tuning Method Based on Gyros and Cameras


Abstract
:1. Introduction
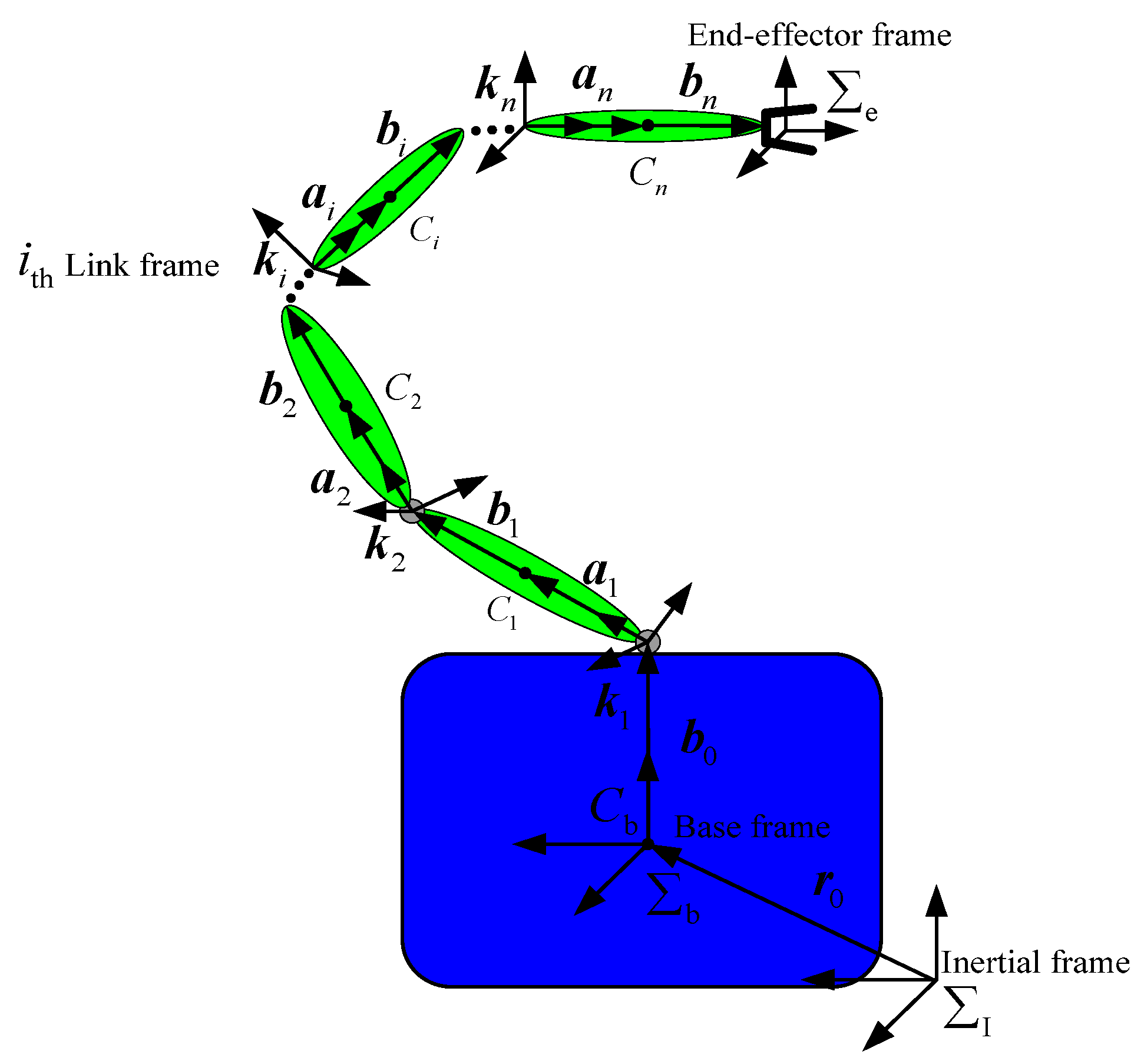
2. Free-Floating Space Robot Kinematics Modeling
- (1)
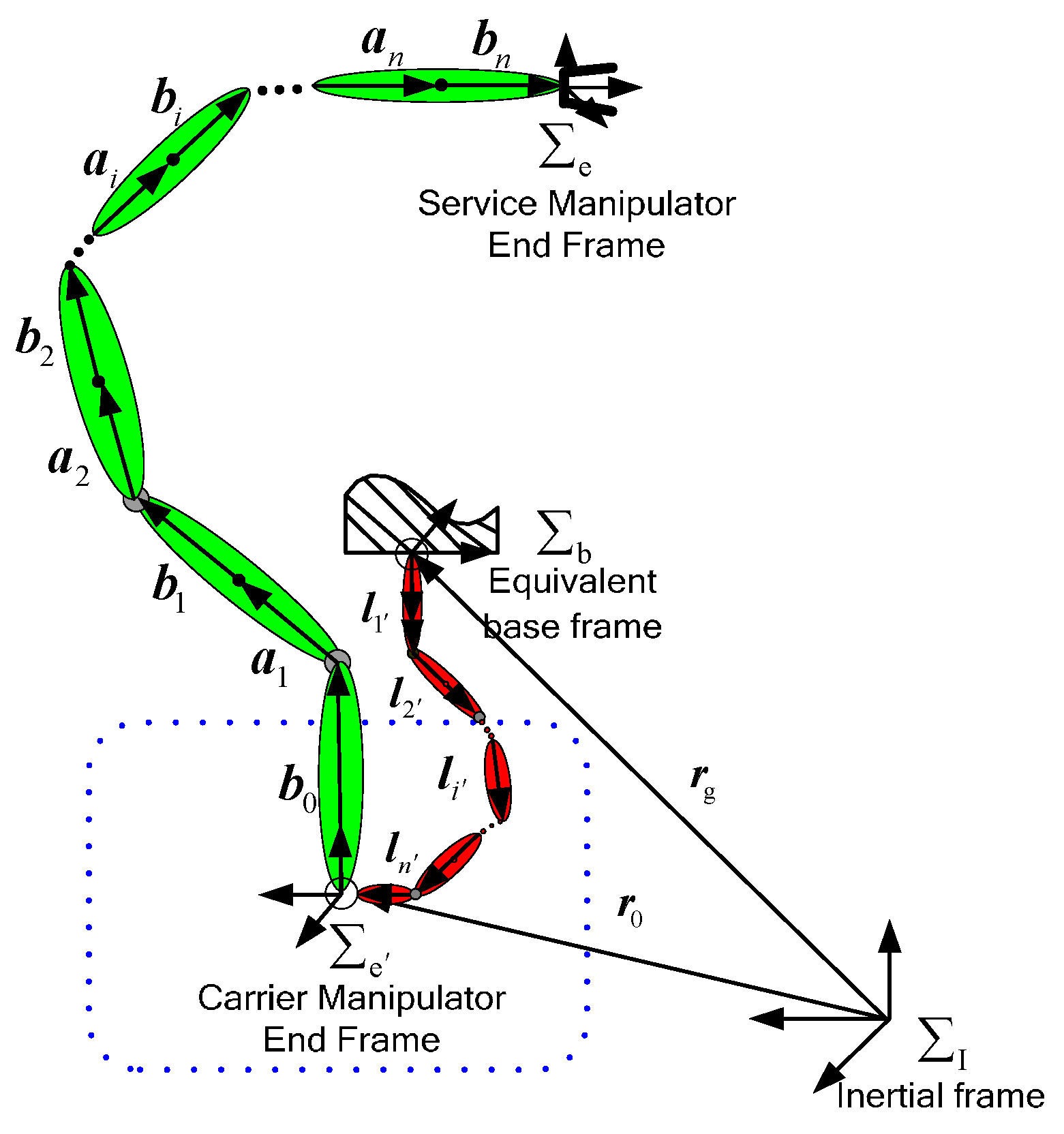
- Since the free-floating space robot system is kinematically equivalent to the hypothetical robotic system, this new space robot model is not complex to compute because only ground-fixed robot kinematics are involved in the calculations.
- (2)
- In the new translational-motion equations, the undetermined carrier satellite mass, which is a challenge in parameter estimating as suggested in [32], only impacts a constant factor, namely γ. Accordingly, this new modeling method is more convenient in identifying the satellite mass properties.
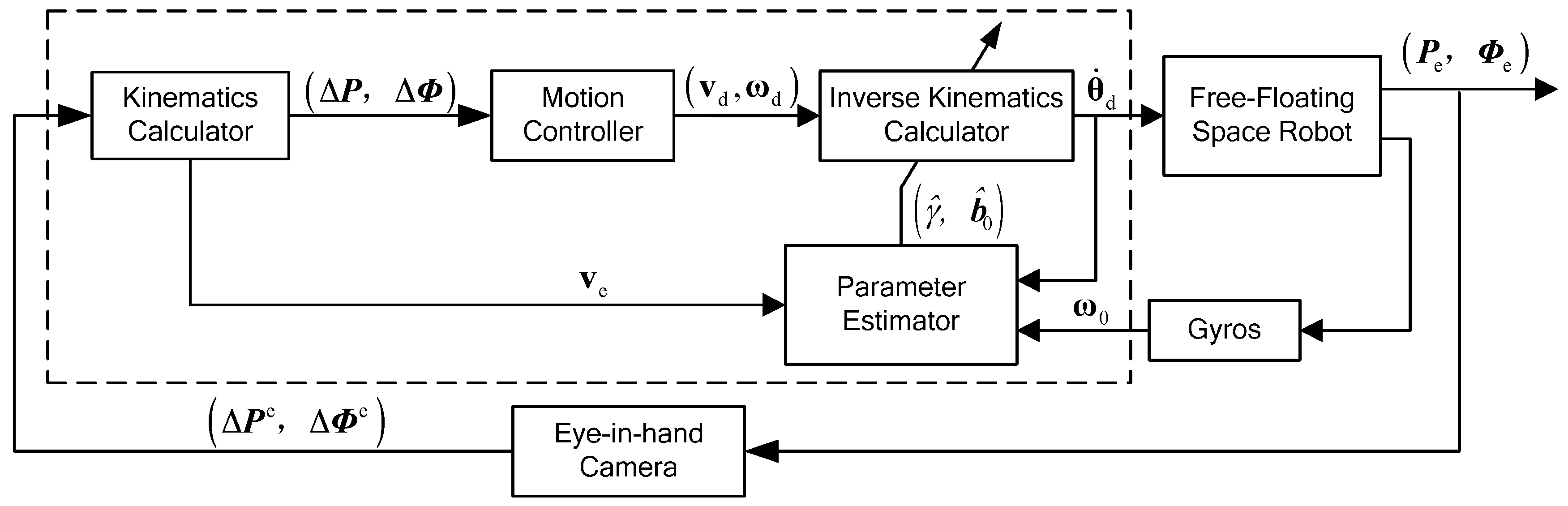
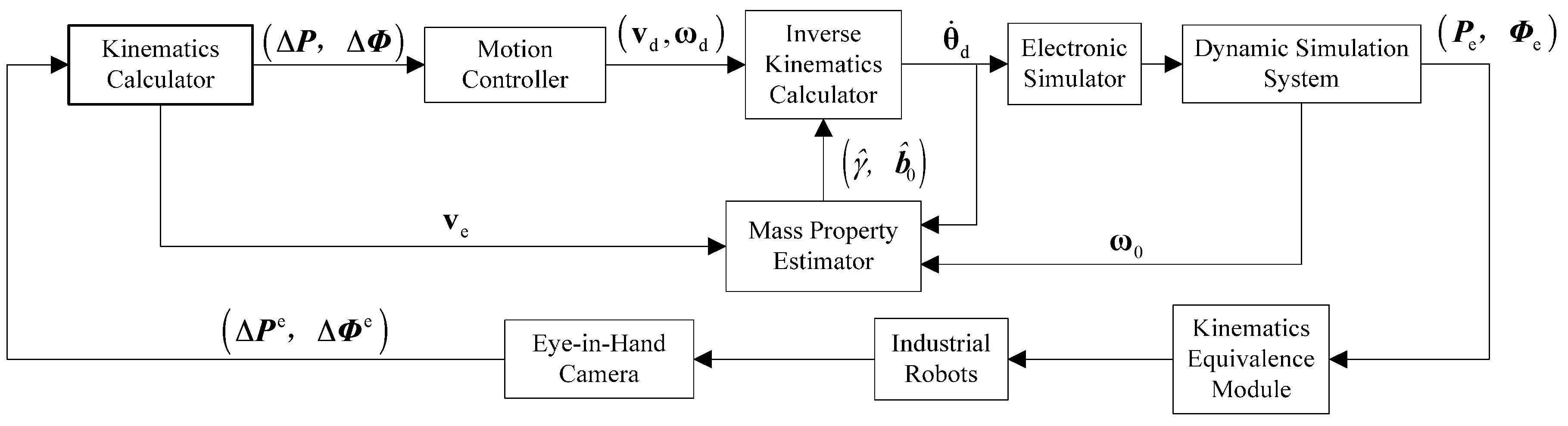
3. Self-Tuning Control Designing
3.1. Kinematics Calculator Designing
3.2. Motion Controller Designing
3.3. Inverse Kinematics Calculating
3.4. Mass Property Estimating
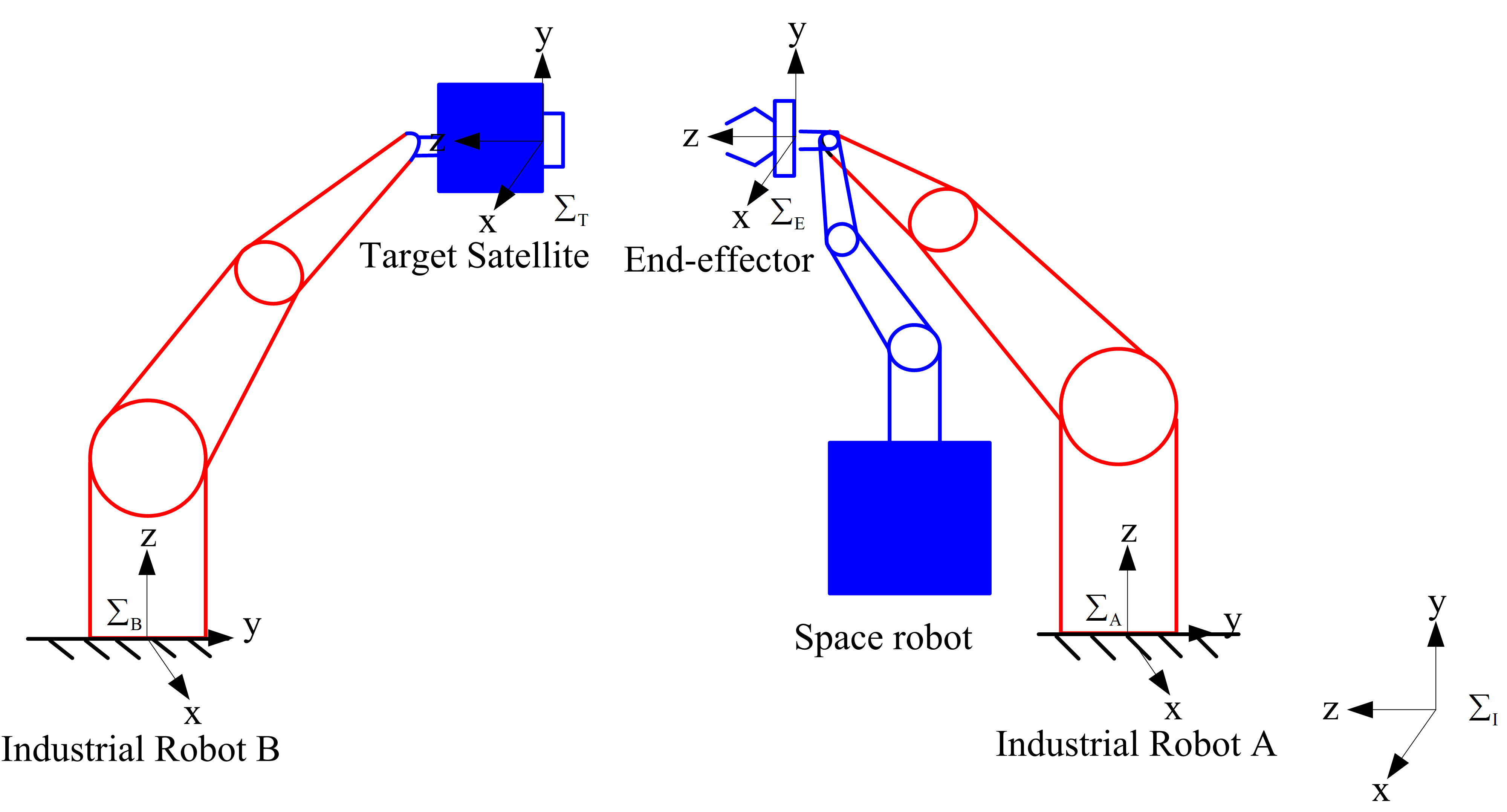
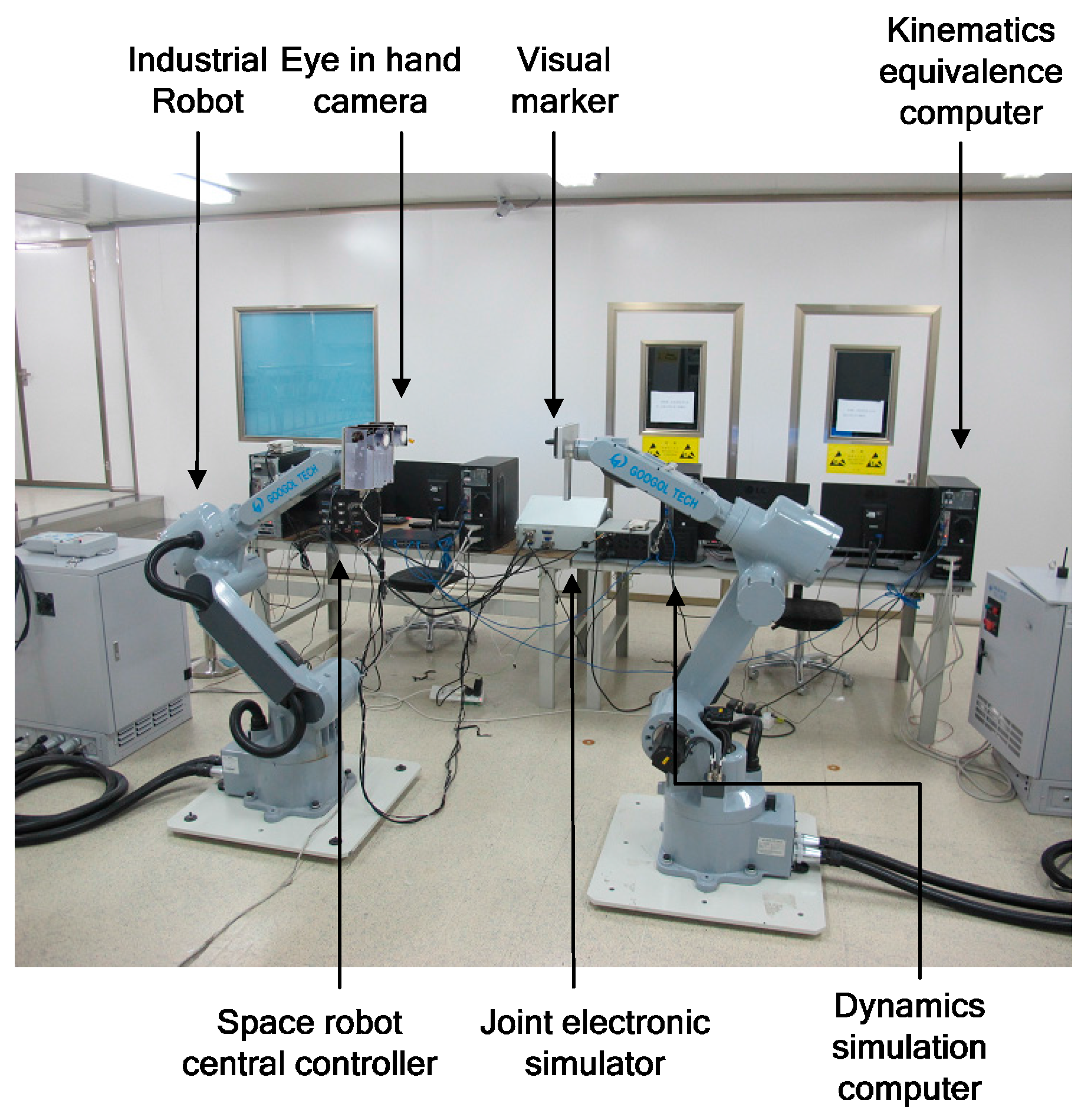
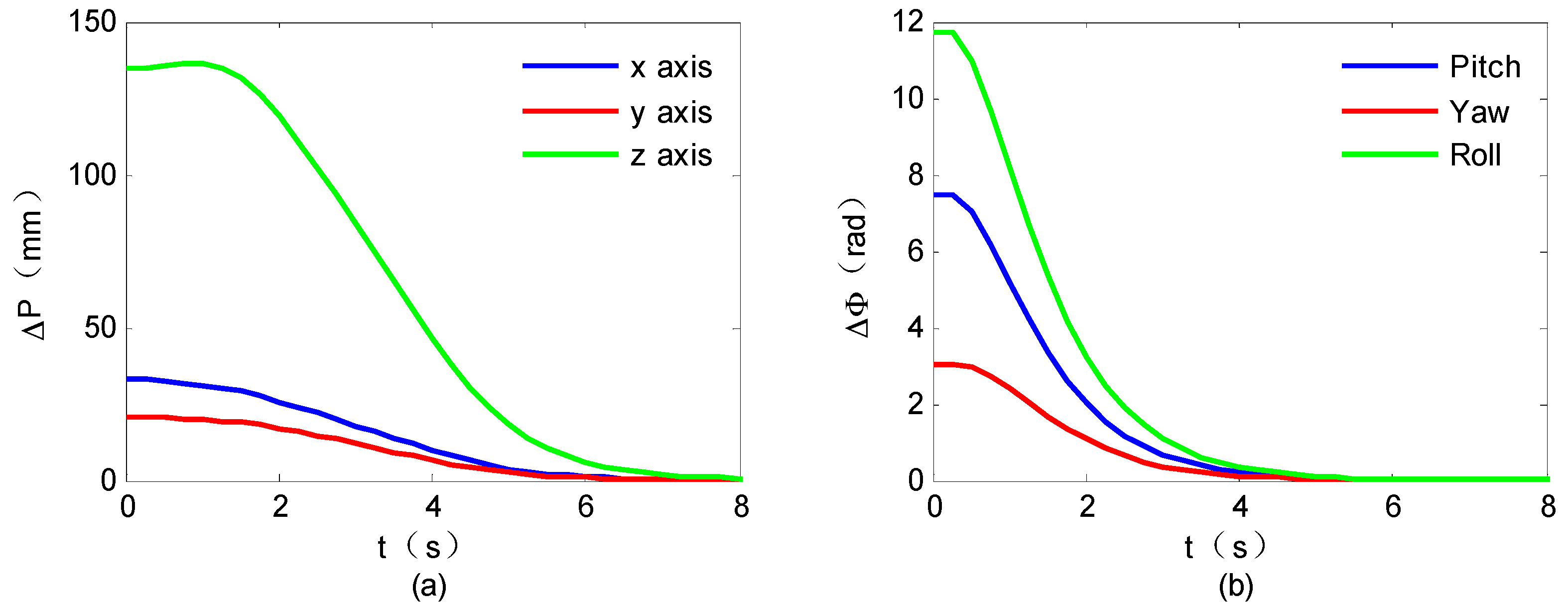
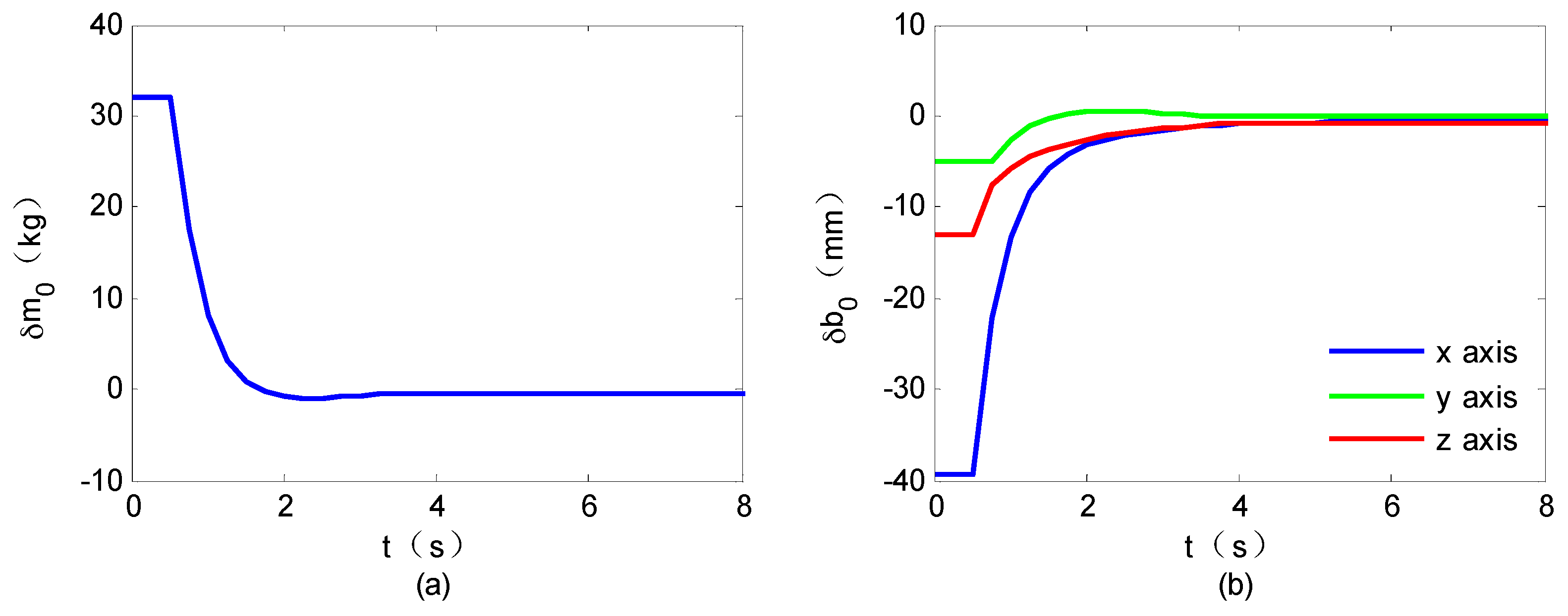
4. Ground Testing Based on Hardware-in-the-Loop Simulation System
- (1)
- Compared with the propulsion-based methods as presented in [37], because the thrusters are not applied in the proposed method, no satellite fuel will be consumed.
- (2)
- Unlike the direct torque-sensing method proposed in [38], this proposed method doesn’t demand any torque or acceleration measurements, not only in theory but also in engineering.
- (3)
- Compared with the method based on measuring the reaction wheel motion rates presented in [32], which has difficulty estimating the satellite mass, the proposed method identifies both satellite mass and centroid position by adopting eye-in-hand camera signals and gyro information.
- (4)
- Compared with the method presented in [33], which estimates the satellite mass properties base on sensing the satellite rotation and translation, this proposed method doesn’t require the linear velocity of the carrier satellite, which is usually integrated from accelerometer data and brings drifting errors.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Yoon, W.; Goshozono, T.; Kawabe, H.; Kinami, M.; Tsumaki, Y.; Uchiyama, M.; Oda, M.; Doi, T. Model based space robot teleoperation of ETS-VII manipulator. IEEE Trans. Robot. Autom. 2004, 20, 602–612. [Google Scholar] [CrossRef]
- Yoshida, K.; Hasizume, K.; Nenchev, D.N.; Inaba, N.; Oda, M. Control of a space manipulator for autonomous target capture-ETS-VII flight experiments and analysis. Guid. Navig. Control 2000. [Google Scholar] [CrossRef]
- Yoshida, K.; Hashizume, K.; Abiko, S. Zero reaction maneuver: Flight validation with ETS-VII space robot and extension to kinematically redundant arm. In Proceedings of the IEEE International Conference on Robotics & Automation, Seoul, Korea, 21–26 May 2001; IEEE Computer Society: Washington, DC, USA.
- Motaghedi, P. On-orbit performance of the Orbital Express Capture System. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 15 April 2008; SPIE: Bellingham, WA, USA.
- Ogilvie, A.; Allport, J.; Hannah, M.; Lymer, J. Autonomous satellite servicing using the Orbital Express demonstration manipulator system. In Proceedings of the 9th International Symposium on Artificial Intelligence, Robotics and Automation in Space, Hollywood, SC, USA, 25–29 February 2008; IEEE Computer Society: Washington, DC, USA.
- Pinson, R.; Howard, R.; Heaton, A. Orbital Express Advanced Video Guidance Sensor: Ground Testing, Flight Results and Comparisons. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; AIAA: Reston, VA, USA.
- Jin, M.; Yang, H.; Xie, Z.; Sun, K.; Liu, H. The Ground-based Verification System of Visual Servoing Control for a Space Robot. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; IEEE Computer Society: Washington, DC, USA.
- Liang, B.; Li, C.; Xue, L.; Qiang, W. A Chinese Small Intelligent Space Robotic System for On-Orbit Servicing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE Computer Society: Washington, DC, USA.
- Dubowsky, S.; Papadopoulos, E. The kinematics, dynamics and control of free-flying and free-floating space robotics system. IEEE Trans. Robot. Autom. 1993, 9, 531–543. [Google Scholar] [CrossRef]
- Oda, M.; Ohkami, Y. Coordinated control of spacecraft attitude and space manipulators. Control Eng. Pract. 1997, 5, 11–21. [Google Scholar] [CrossRef]
- Umetani, Y.; Yoshida, K. Resolved motion rate control of space manipulators with generalized jacobian matrix. IEEE Trans. Robot. Autom. 1989, 5, 303–314. [Google Scholar] [CrossRef]
- Vafa, Z.; Dubowsky, S. The kinematics and dynamics of Space manipulators: The virtual manipulator approach. Int. J. Robot. Res. 1990, 9, 3–21. [Google Scholar] [CrossRef]
- Papadopoulos, E.; Dubowsky, S. On the nature of control algorithms for free-floating space manipulators. IEEE Trans. Robot. Autom. 1991, 7, 750–758. [Google Scholar] [CrossRef]
- Fang, Y.; Zhang, W.; Ye, X. Variable Structure Control for Space Robots Based on Neural Networks. Int. J. Adv. Robot. Syst. 2014, 11. [Google Scholar] [CrossRef]
- Huang, P.; Xu, X.; Meng, Z. Optimal Trajectory Planning and Coordinated Tracking Control Method of Tethered Space Robot Based on Velocity Impulse. Int. J. Adv. Robot. Syst. 2014, 11. [Google Scholar] [CrossRef]
- Meng, Z.; Huang, P. An Effective Approach Control Scheme for the Tethered Space Robot System. Int. J. Adv. Robot. Syst. 2014, 11. [Google Scholar] [CrossRef]
- Wang, D.; Huang, P.; Cai, J.; Meng, Z. Coordinated control of tethered space robot using mobile tether attachment point in approaching phase. Adv. Space Res. 2014, 54, 1077–1091. [Google Scholar] [CrossRef]
- Huang, P.; Wang, D.; Meng, Z.; Zhang, F.; Liu, Z. Impact dynamic modelling and adaptive target capturing control for tethered space robots with uncertainties. IEEE/ASME Trans. Mechatron. 2016, 21, 2260–2271. [Google Scholar] [CrossRef]
- Huang, P.; Wang, D.; Meng, Z.; Zhang, F. Adaptive postcapture backstepping control for tumbling tethered space robot–target combination. J. Guid. Control Dyn. 2016, 39, 150–155. [Google Scholar] [CrossRef]
- Huang, P.; Wang, M.; Meng, Z.; Zhang, F.; Liu, Z.; Chang, H. Reconfigurable spacecraft attitude takeover control in post-capture of target by space manipulators. J. Frankl. Inst. 2016, 353, 1985–2008. [Google Scholar] [CrossRef]
- Pathak, P.M.; Kumar, R.P.; Mukherjee, A.; Dasgupta, A. A scheme for robust trajectory control of space robots. Simul. Model. Pract. Theory 2008, 16, 1337–1349. [Google Scholar] [CrossRef]
- Tsuchiya, K. Breakwell Memorial Lecture: Attitude dynamics of satellite—From spinning satellite to space robot. Acta Astronaut. 2008, 62, 131–139. [Google Scholar] [CrossRef]
- Rastegari, R.; Moosavian, S.A.A. Multiple impedance control of space free-flying robots via virtual linkages. Acta Astronaut. 2010, 66, 748–759. [Google Scholar] [CrossRef]
- Zarafshan, P.; Moosavian, S.A.A. Dynamics modeling and Hybrid Suppression Control of space robots performing cooperative object manipulation. Commun. Nonlinear Sci. Numer. Simulat. 2013, 18, 2807–2824. [Google Scholar] [CrossRef]
- Hutchinson, S.; Hager, G.D.; Corke, P.I. A tutorial on visual servo control. IEEE Trans. Robot. Autom. 1996, 12, 651–670. [Google Scholar] [CrossRef]
- Chaumette, F.; Hutchinson, S. Visual servo control. I. Basic approaches. IEEE Robot. Autom. Mag. 2006, 13, 82–90. [Google Scholar] [CrossRef]
- Chaumette, F.; Hutchinson, S. Visual servo control. II. Advanced approaches. IEEE Robot. Autom. Mag. 2007, 14, 109–118. [Google Scholar] [CrossRef]
- Rouleau, G.; Rekleitis, I.; L’Archeveque, R.; Martin, E. Autonomous capture of a tumbling satellite. J. Field Robot. 2007, 24, 275–296. [Google Scholar]
- Sabatini, M.; Monti, R.; Gasbarri, P.; Palmerini, G. Adaptive and robust algorithms and tests for visual-based navigation of a space robotic manipulator. Acta Astronaut. 2013, 83, 65–84. [Google Scholar] [CrossRef]
- Sabatini, M.; Monti, R.; Gasbarri, P.; Palmerini, G. Deployable space manipulator commanded by means of visual-based guidance and navigation. Acta Astronaut. 2013, 83, 27–43. [Google Scholar] [CrossRef]
- Dong, G.; Zhu, Z.H. Position-based visual servo control of autonomous robotic manipulators. Acta Astronaut. 2015, 115, 291–302. [Google Scholar] [CrossRef]
- Yoshida, K.; Abiko, S. Inertia Paramter Identification for a Free-flying Space Robot. AIAA Guid. Navig. Control Conf. Exhib. 2002, 38, 1–8. [Google Scholar]
- Ma, O.; Dang, H.; Pham, K. On-Orbit Identification of Inertia Properties of Spacecraft Using a Robotic Arm. J. Guid. Control Dyn. 2008, 31, 1761–1771. [Google Scholar] [CrossRef]
- Ma, O.; Wang, J.; Misra, S.; Liu, M. On the validation of SPDM task verification facility. J. Robot. Syst. 2004, 21, 219–235. [Google Scholar] [CrossRef]
- Xu, W.; Liu, Y.; Liang, B.; Xu, Y.; Qiang, W. Autonomous Path Planning and Experiment Study of Free-floating Space Robot for Target Capturing. J. Intell. Robot. Syst. 2008, 51, 303–331. [Google Scholar] [CrossRef]
- Boge, T.; Ma, O. Using Advanced Industrial Robotics for Spacecraft Rendezvous and Docking Simulation. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE Computer Society: Washington, DC, USA.
- Rackl, W.; Lampariello, R.; Albu-Schäffer, A. Parameter identification methods for free-floating space robots with direct torque sensing. In Proceedings of the IFAC Symposium on Automatic Control in Aerospace, Würzburg, Germany, 2–6 September 2013; Elsevier: Amsterdam, The Netherlands.
- Xu, W.; Hu, Z.; Zhang, Y.; Wang, Z.; Wu, X. A practical and effective method for identifying the complete inertia parameters of space robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; IEEE Computer Society: Washington, DC, USA.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (unit) | Base | Pole 1 | Pole 2 | Pole 3 | Pole 4 | Pole 5 | Pole 6 |
|---|---|---|---|---|---|---|---|
| (kg) | 648 | 1.5 | 9.6 | 1.5 | 9.0 | 1.5 | 10.5 |
| (mm) | 0 | 0 | −493.5 | 0 | 289 | 0 | −112 |
| (mm) | 0 | 0 | 56 | −123 | −123 | 127 | 0 |
| (mm) | 0 | 120 | 0 | 0 | 0 | 0 | 0 |
| (mm) | 539 | 0 | −493.5 | 123 | 333 | −123 | −123 |
| (mm) | 5 | 189 | −56 | 0 | 12 | 0 | 0 |
| (mm) | 813 | 0 | 0 | 0 | 0 | 0 | 0 |
| (kg∙m2) | 198 | 0.82 | 0.91 | ||||
| (kg∙m2) | 198 | 1.92 | 0.64 | 0.91 | |||
| (kg∙m2) | 198 | 1.92 | 0.67 | 0.11 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wang, B.; Liu, H. Target Capturing Control for Space Robots with Unknown Mass Properties: A Self-Tuning Method Based on Gyros and Cameras. Sensors 2016, 16, 1383. https://doi.org/10.3390/s16091383
Li Z, Wang B, Liu H. Target Capturing Control for Space Robots with Unknown Mass Properties: A Self-Tuning Method Based on Gyros and Cameras. Sensors. 2016; 16(9):1383. https://doi.org/10.3390/s16091383
Chicago/Turabian StyleLi, Zhenyu, Bin Wang, and Hong Liu. 2016. "Target Capturing Control for Space Robots with Unknown Mass Properties: A Self-Tuning Method Based on Gyros and Cameras" Sensors 16, no. 9: 1383. https://doi.org/10.3390/s16091383
APA StyleLi, Z., Wang, B., & Liu, H. (2016). Target Capturing Control for Space Robots with Unknown Mass Properties: A Self-Tuning Method Based on Gyros and Cameras. Sensors, 16(9), 1383. https://doi.org/10.3390/s16091383