
Sine Rotation Vector Method for Attitude Estimation of an Underwater Robot



Abstract
:
1. Introduction
2. Problem Formulation
2.1. Nomenclature
| attitude of a robot at time t; , where , and indicate roll, pitch and yaw | |
| attitude estimated at time t through prediction and a correction procedure; | |
| error covariance of the estimated attitude | |
| attitude predicted at time t, before it is corrected by the measurements; | |
| error covariance of the predicted attitude | |
| acceleration measured in the instrument coordinate frame; | |
| normalized acceleration measurement; | |
| magnetic field measured in the instrument coordinate frame; | |
| normalized magnetic field measurement; | |
| measurements of roll, pitch and yaw calculated from the and at time t; | |
| linear velocity of the robot in the robot coordinate frame; | |
| rotational velocity of the robot in the robot coordinate frame; | |
| motion model of a robot that relates the robot attitude and the linear velocity to the rotational velocity of the robot; | |
| the measurement model that relates state to the measurement ; | |
| the k-th discretized sampling time instant | |
| time period between and ; |
2.2. Problem Formulation
3. Predictions of Attitude and Covariance
4. Corrections of Predicted Attitude and Covariance
5. Innovation by Sine Rotation Vector
5.1. Calculation of Innovation by Sine Rotation Vector
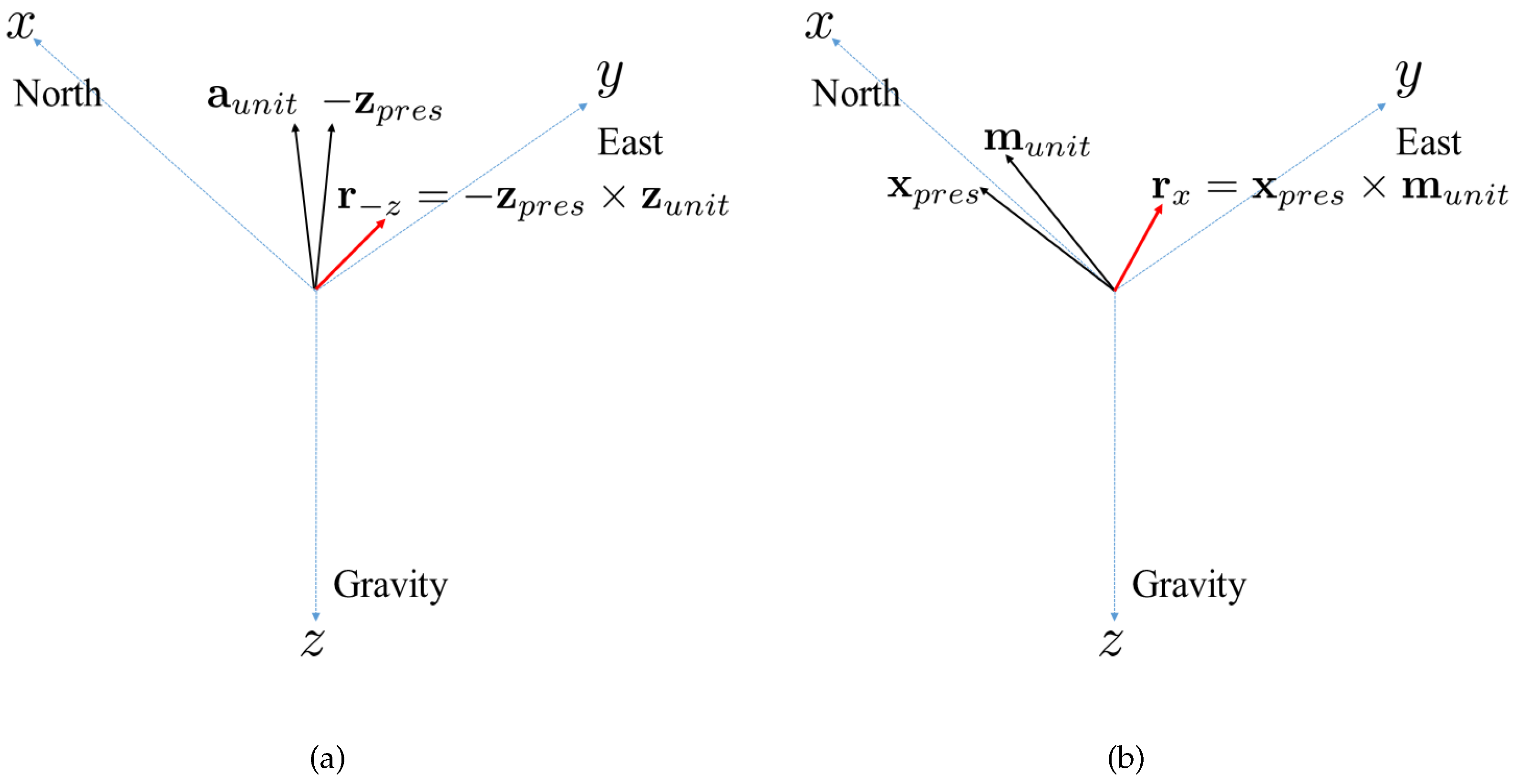
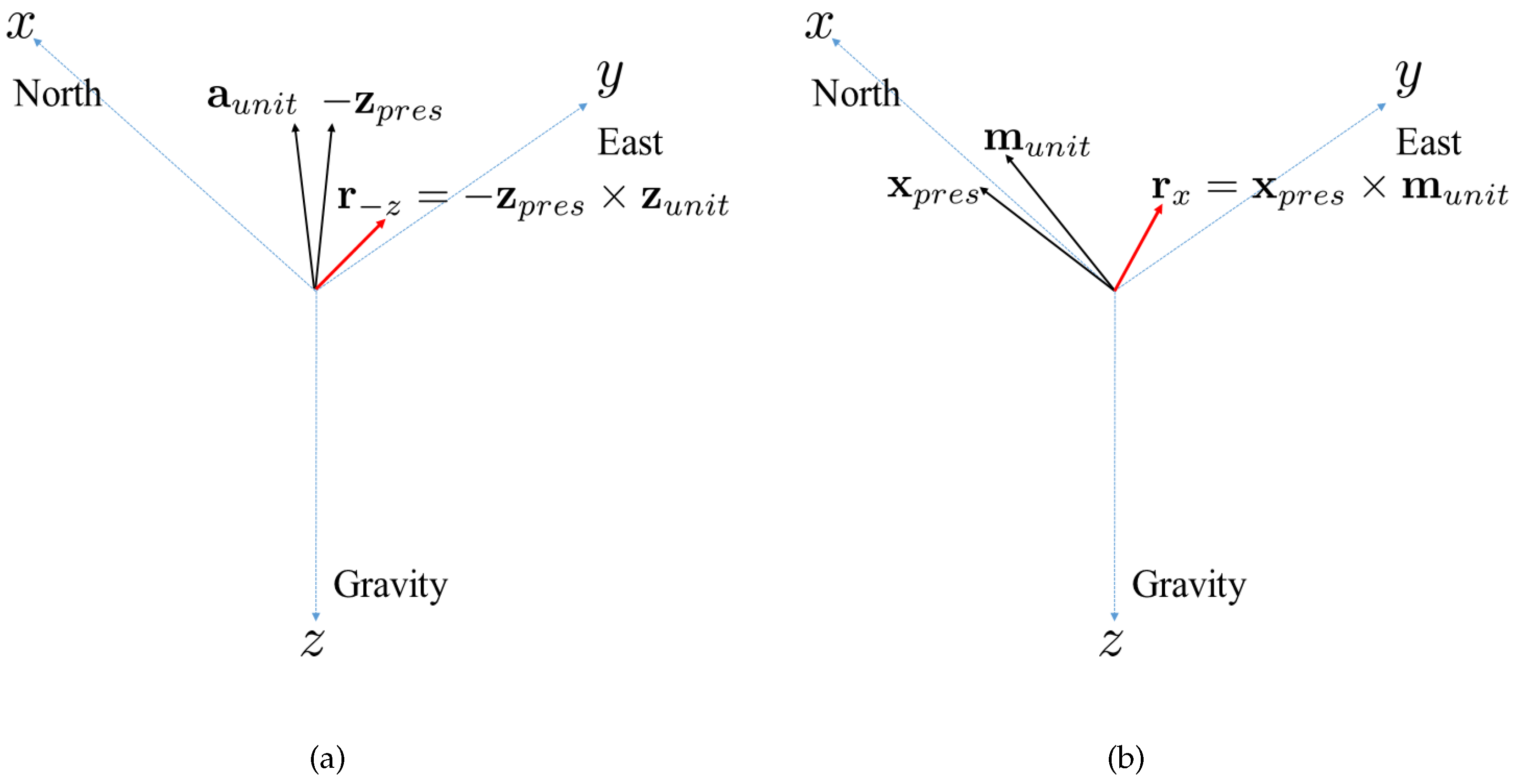
5.2. Sine Rotation Vector
6. Experiments and Results
6.1. Test through Simulation
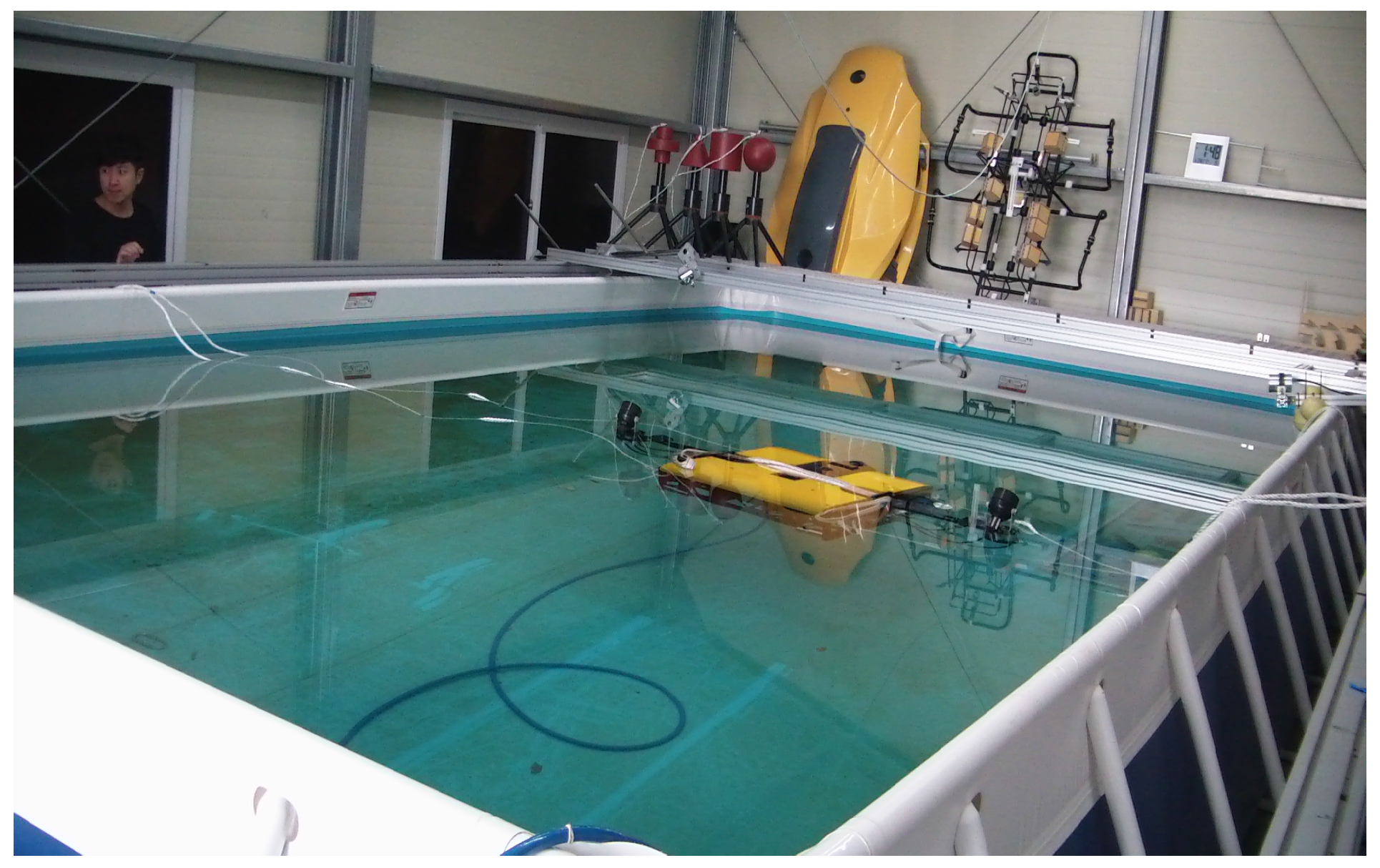
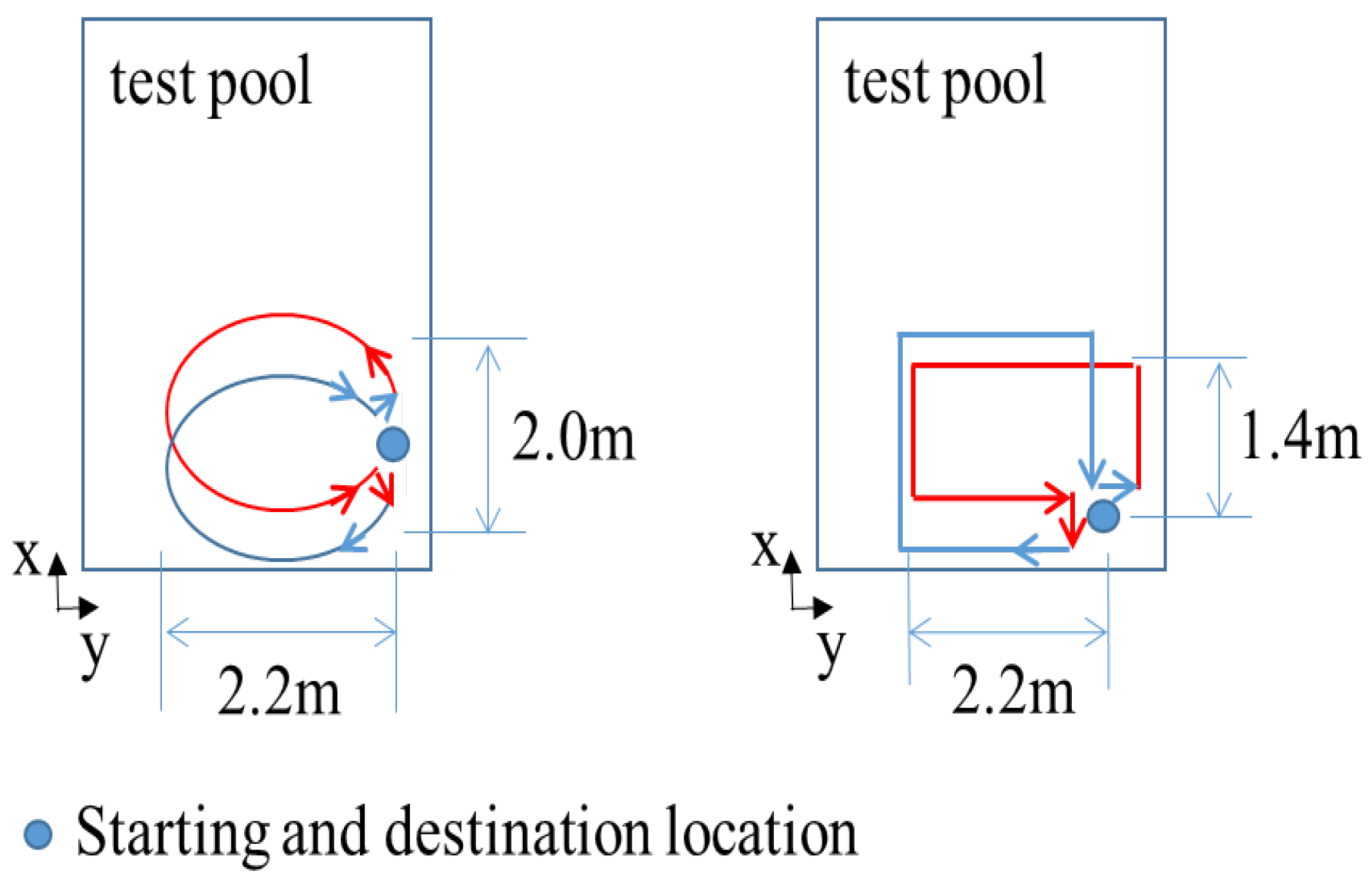
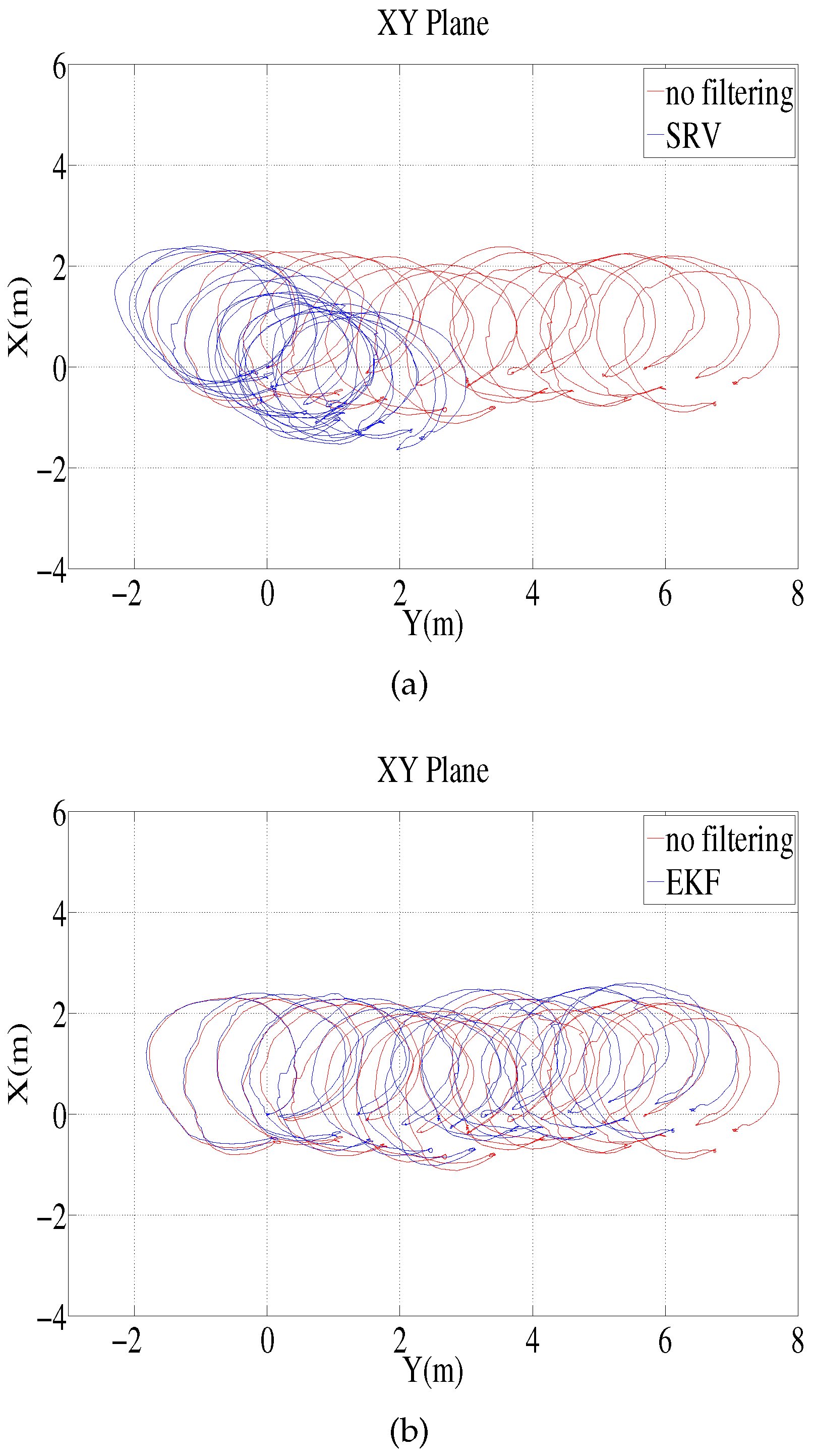
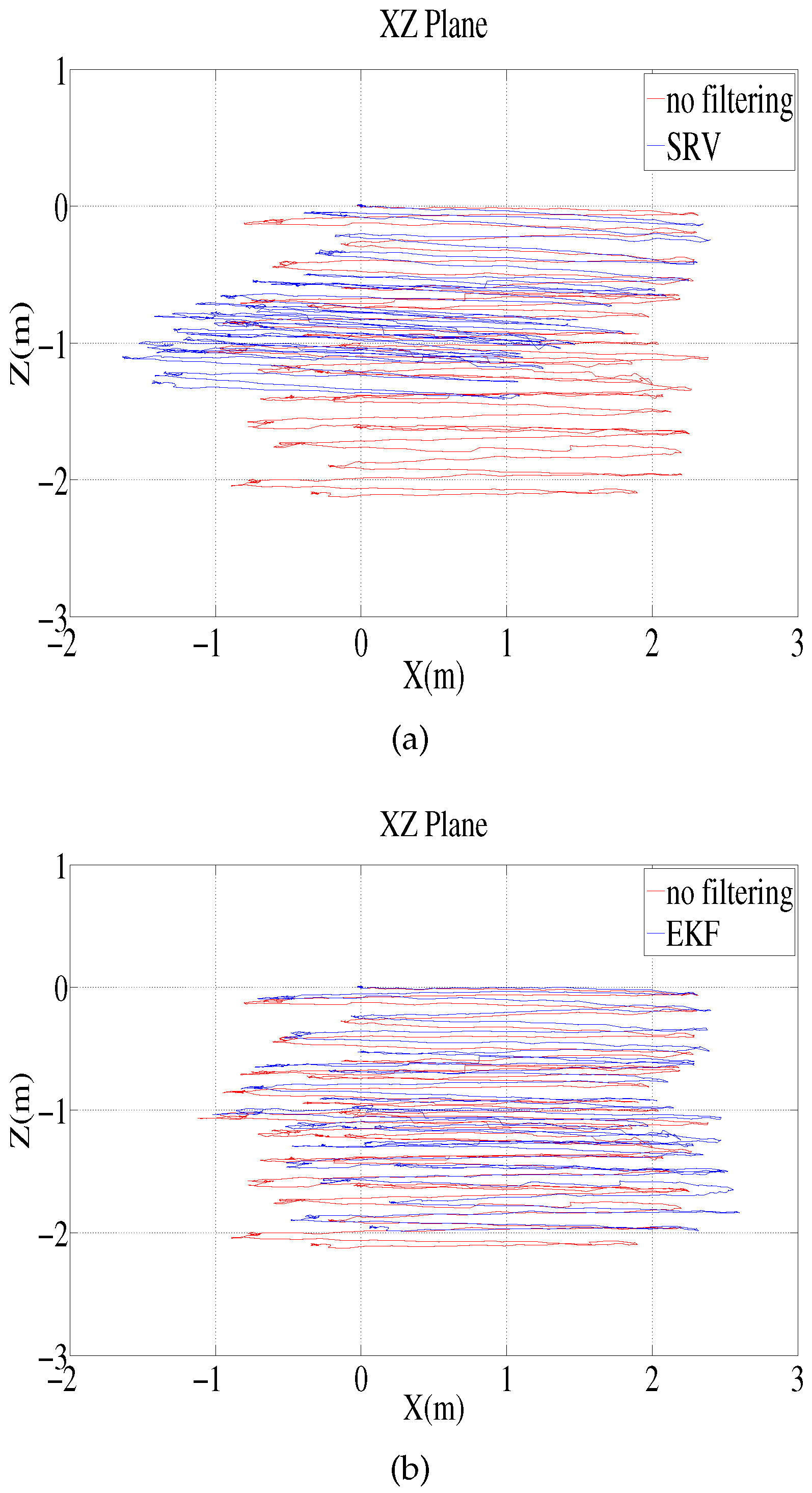
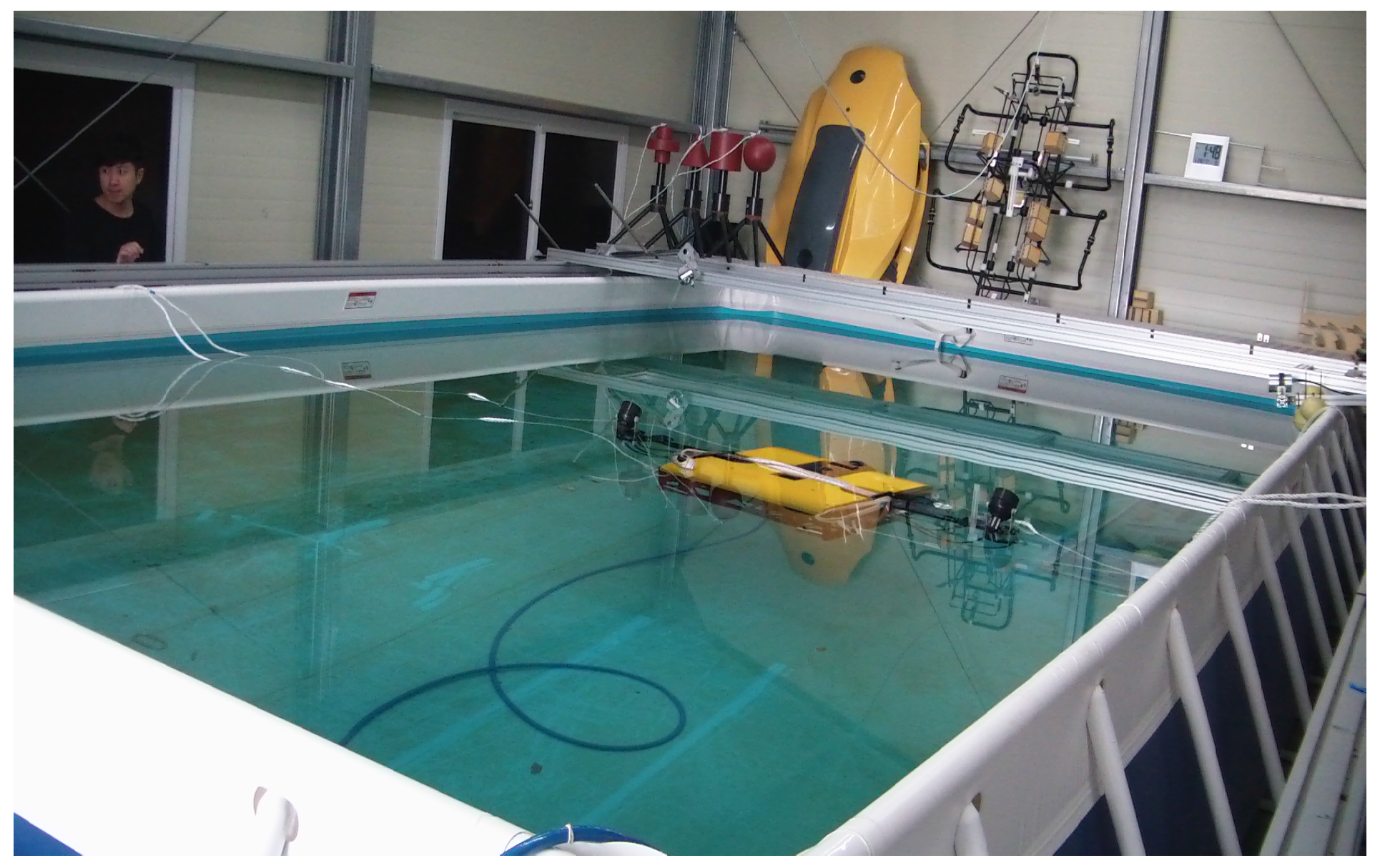
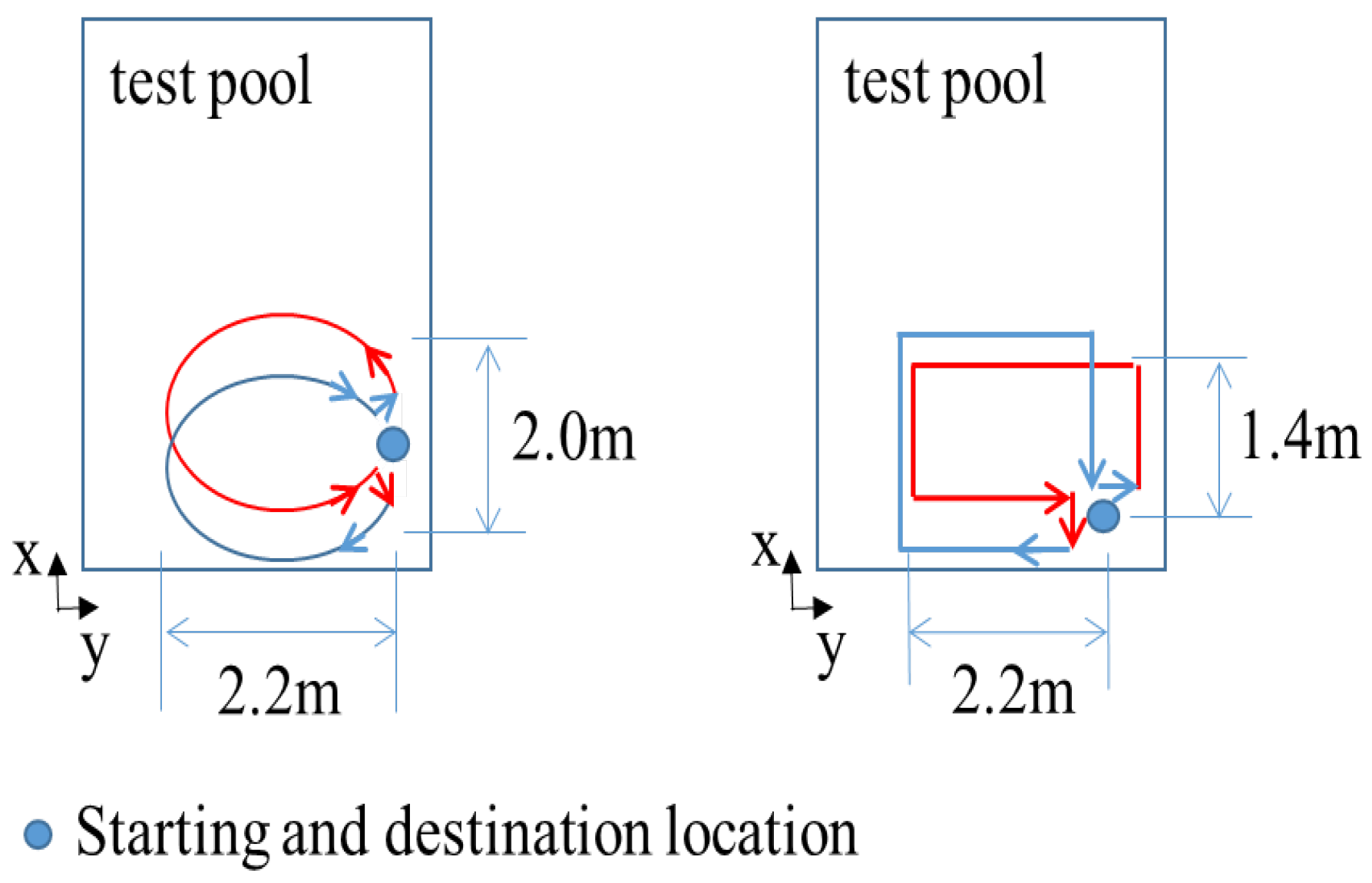
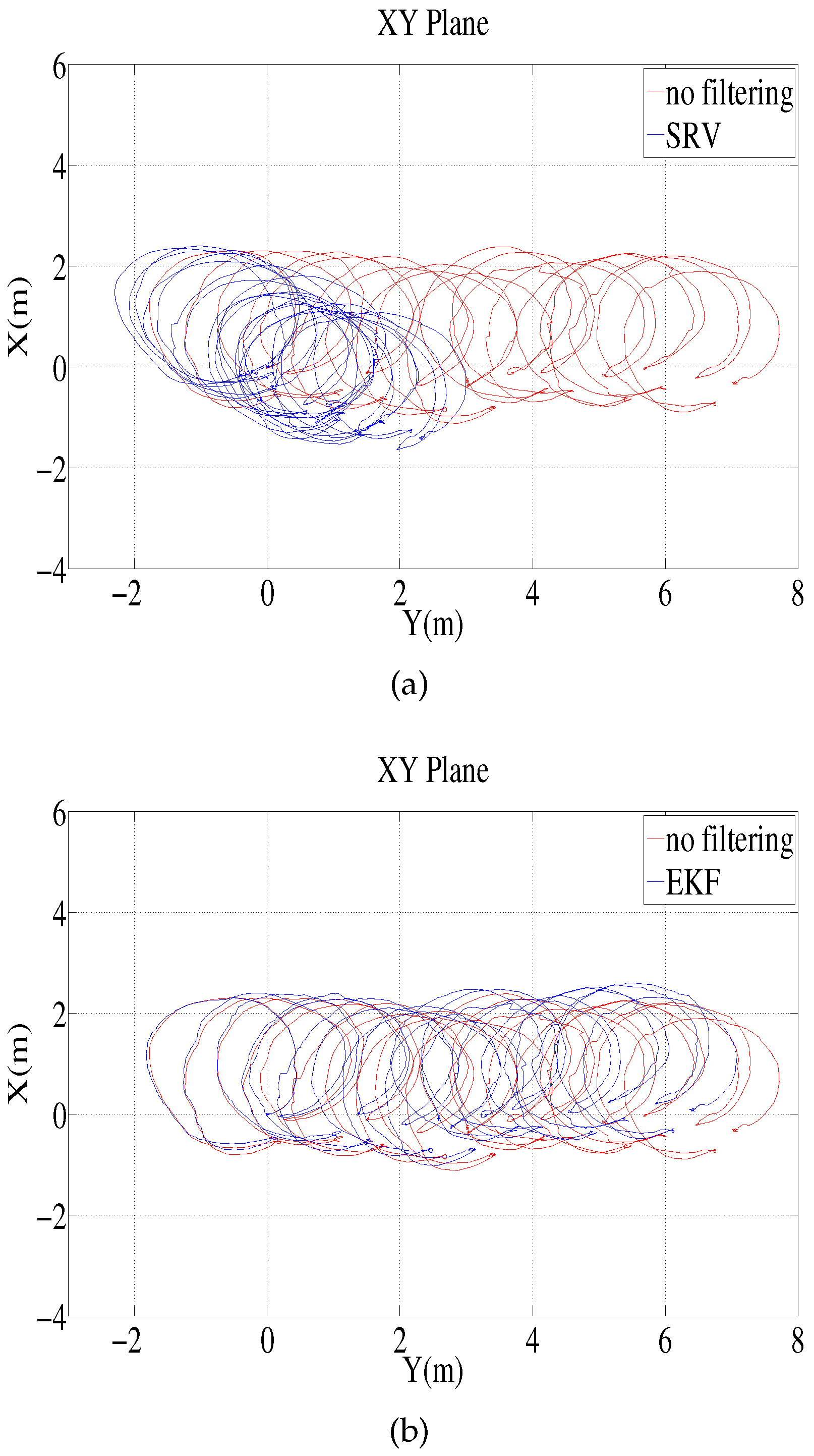
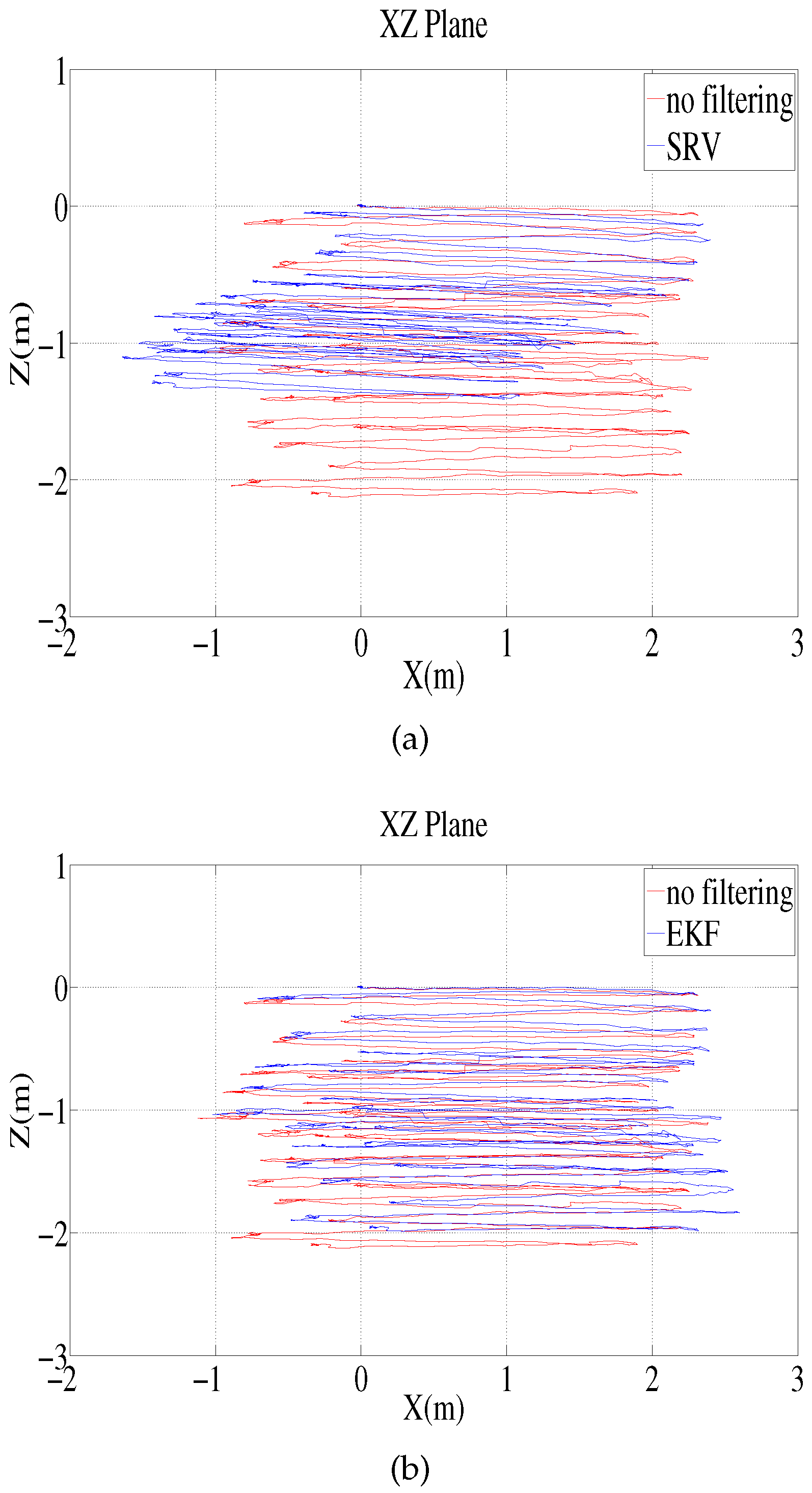
6.2. Experiment in a Test Tank
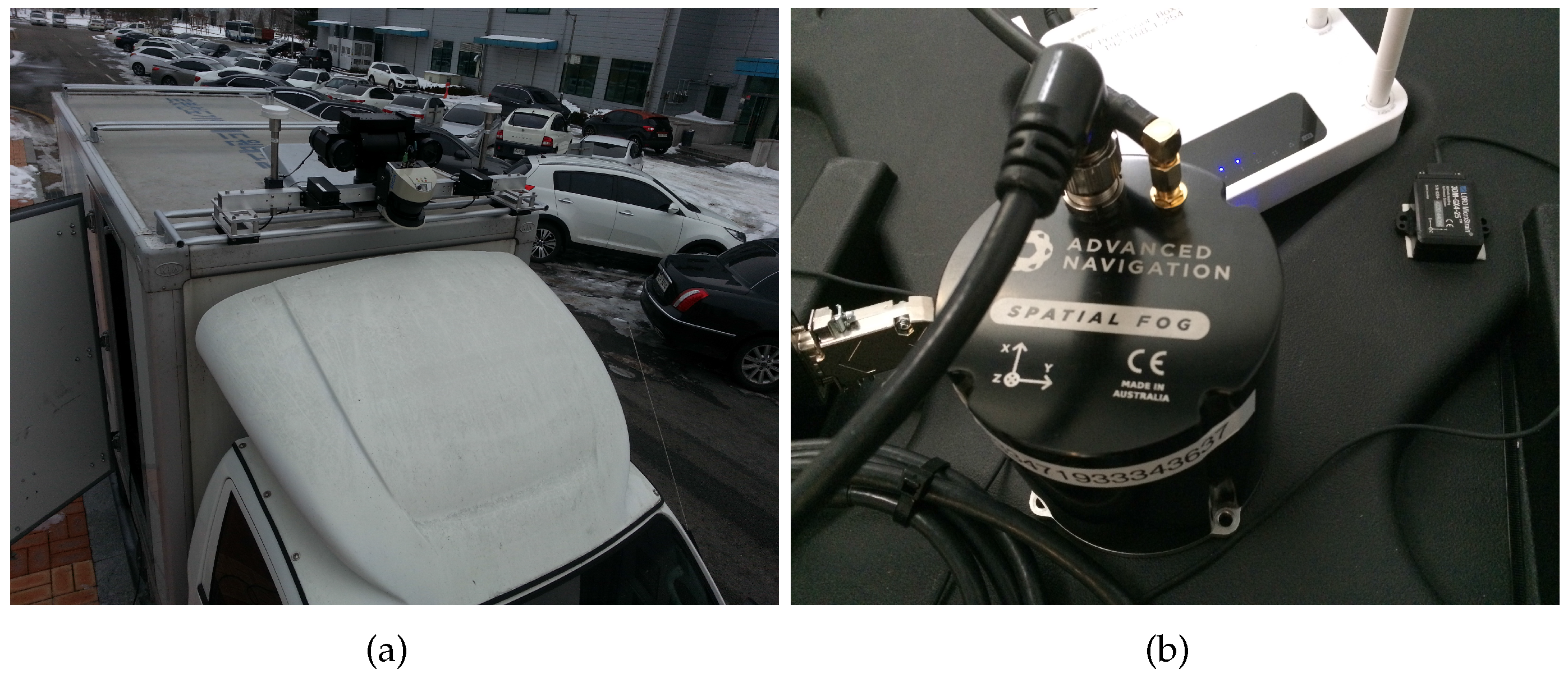
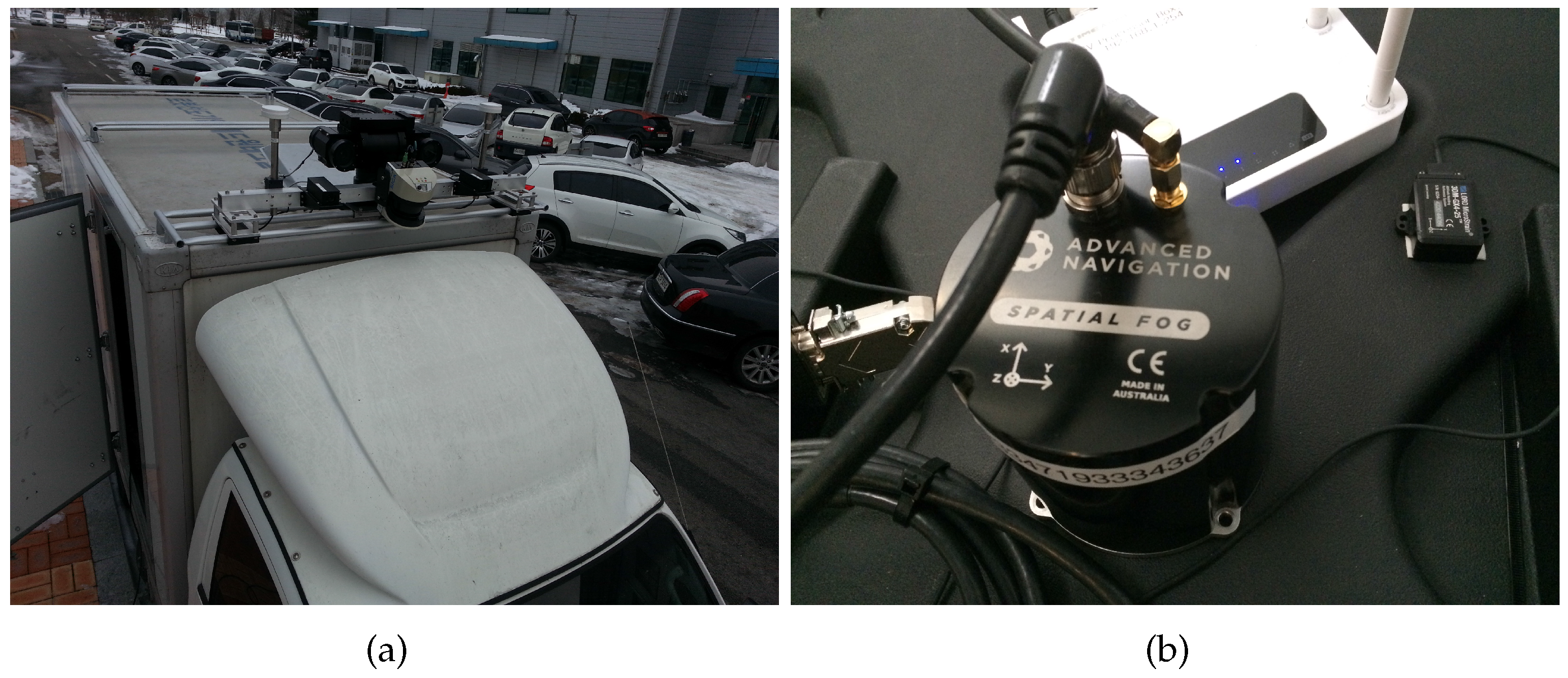
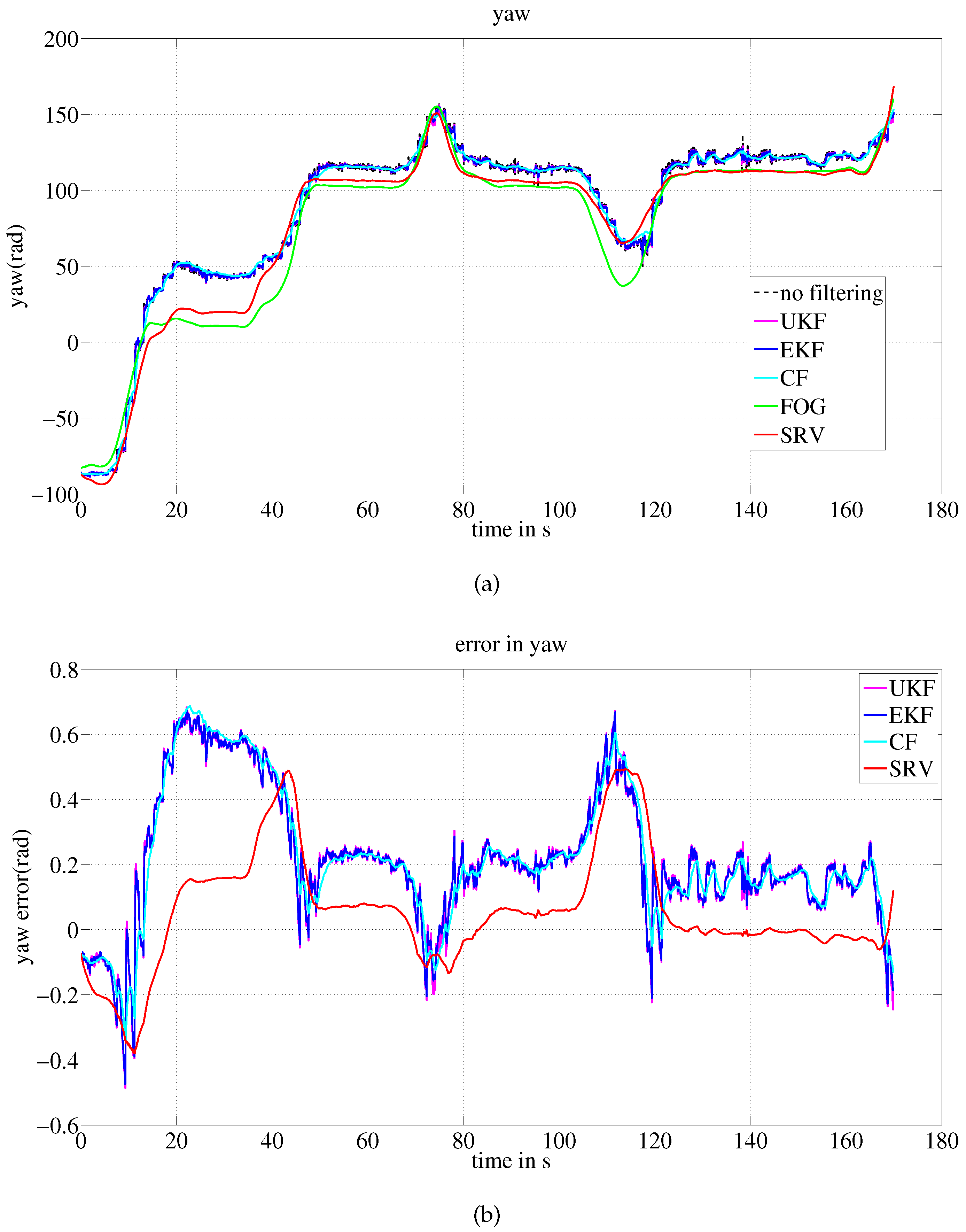
6.3. Experiment on the Ground
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Allotta, B.; Costanzi, R.; Fanelli, F.; Ridolfi, A. Underwater vehicles attitude estimation in presence of magnetic disturbances. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2612–2617.
- Lee, Y.-P.; Moon, Y.S.; Ko, N.Y.; Choi, H.-T.; Huang, L.; Bae, Y. Measurement of DS-CDMA Propagation Distance in Underwater Acoustic Communication Considering Attenuation and Noise. Int. J. Fuzzy Logic Intell. Syst. 2015, 15, 20–26. [Google Scholar] [CrossRef]
- Lee, Y.-P.; Moon, Y.S.; Ko, N.Y.; Choi, H.-T.; Huang, L.; Bae, Y. DSSS-Based Channel Access Technique DS-CDMA for Underwater Acoustic Transmission. Int. J. Fuzzy Logic Intell. Syst. 2015, 15, 53–59. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Ko, N.Y.; Kuc, T.-Y. Fusing Range Measurements from Ultrasonic Beacons and a Laser Range Finder for Localization of a Mobile Robot. Sensors 2015, 15, 11050–11075. [Google Scholar] [CrossRef] [PubMed]
- Kinsey, J.C.; Yang, Q.; Howland, J.C. Nonlinear Dynamic Model-Based State Estimators for Underwater Navigation of Remotely Operated Vehicles. IEEE Trans. Control Syst. Technol. 2014, 22, 1845–1854. [Google Scholar] [CrossRef]
- Hegrenaes, Ø.; Hallingstad, O. Model-aided INS with sea current estimation for robust underwater navigation. IEEE J. Ocean. Eng. 2011, 36, 316–337. [Google Scholar]
- Morgado, M.; Oliveira, P.; Silvestre, C.; Vasconcelos, J.F. Embedded Vehicle Dynamics Aiding for USBL/INS Underwater Navigation System. IEEE Trans. Control Syst. Technol. 2014, 22, 322–330. [Google Scholar] [CrossRef]
- Fagogenis, G.; Flynn, D.; Lane, D.M. Improving Underwater Vehicle Navigation State Estimation Using Locally Weighted Projection Regression. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6549–6554.
- Krishnamurthy, P.; Khorrami, F. A self-aligning underwater navigation system based on fusion of multiple sensors including DVL and IMU. In Proceedings of the 2013 9th IEEE Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013.
- Ko, N.Y.; Noh, S.W.; Choi, H.-T. Simultaneous estimation of sea level and underwater vehicle location. In Proceedings of the OCEANS 2014-TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–5.
- Shabani, M.; Gholami, A.; Davari, N. Asynchronous direct Kalman filtering approach for underwater integrated navigation system. Nonlinear Dyn. 2015, 80, 71–85. [Google Scholar] [CrossRef]
- Ko, N.Y.; Kim, T.G.; Moon, Y.S. Particle filter approach for localization of an underwater robot using time difference of arrival. In Proceedings of the OCEANS, 2012-Yeosu. IEEE, Yeosu, Korea, 21–24 May 2012.
- Donovan, G.T. Position Error Correction for an Autonomous Underwater Vehicle Inertial Navigation System (INS) Using a Particle Filter. IEEE J. Ocean. Eng. 2012, 37, 431–445. [Google Scholar] [CrossRef]
- Troni, G.; Eustice, R.M. Magnetometer bias calibration based on relative angular position: Theory and experimental comparative evaluation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 444–450.
- Yun, X.; Bachmann, E.R.; McGhee, R.B. A simplified quaternion-based algorithm for orientation estimation from earth gravity and magnetic field measurements. IEEE Trans. Instrum. Meas. 2008, 57, 638–650. [Google Scholar]
- Tarek, H.; Mahony, R. Attitude estimation on SO(3) based on direct inertial measurements. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2170–2175.
- Mahony, R.; Hamel, T.; Pflimlin, J.-M. Complementary filter design on the special orthogonal group SO(3). In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 1477–1484.
- Bar-Itzhack, I.Y.; Deutschmann, J.; Markley, F.L. Quaternion normalization in additive EKF for spacecraft attitude determination. In Proceedings of the Flight Mechanics/Estimation Theory Symposium, Greenbelt, MD, USA, 21–23 May 1991; pp. 403–421.
- Pittelkau, M.E. Rotation vector in attitude estimation. J. Guid. Control Dyn. 2003, 26, 855–860. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Lai, K.-L.; Harman, R.R. Real-time attitude-independent three-axis magnetometer calibration. J. Guid. Control Dyn. 2005, 28, 115–120. [Google Scholar] [CrossRef]
- Troni, G.; Whitcomb, L.L. Preliminary experimental evaluation of a Doppler-aided attitude estimator for improved Doppler navigation of underwater vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 4134–4140.
- Shuster, M.D. The kinematic equation for the rotation vector. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 263–267. [Google Scholar] [CrossRef]
- LORD Corporation. LORD product datasheet, 3DM-GX3-25™, Miniature Attitude Heading Reference System (AHRS). 2014. Available online: http://files.microstrain.com/3DM-GX3-25-Attitude-Heading-Reference-System-Data-Sheet.pdf (accessed on 30 July 2016).
- LinkQuest Inc. NavQuest300/NavQuest600/NavQuest600 Micro Doppler Velocity Log, Users Guide; LinkQuest Inc.: San Diego, CA, USA, 2006. [Google Scholar]
- Advanced Navigation. Spatial FOG Reference Manual, Version 2.2. April 2014. Available online: https://www.advancednavigation.com.au/ (accessed on 30 July 2016).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
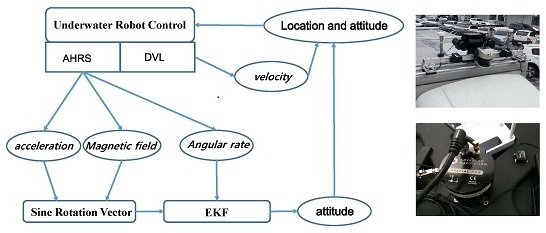
| Short-Term Use | Long-Term Use | |
|---|---|---|
| Angular rate (gyroscope) | prediction | - |
| Gravitational field (accelerometer) | - | correction |
| Magnetic field (magnetometer) | - | correction |
| Velocity (DVL) | - | (1) Location estimation |
| (2) Rejection of dynamic effect | ||
| in gravitational field measurement |
| Simulation | Measurement | Uncertainty | Value (degree) |
|---|---|---|---|
| Simulation 1 | Acceleration | bias | |
| random noise | |||
| Magnetic field | bias | ||
| random noise | |||
| Simulation 2 | Acceleration | bias | |
| random noise | |||
| Magnetic field | bias | ||
| random noise |
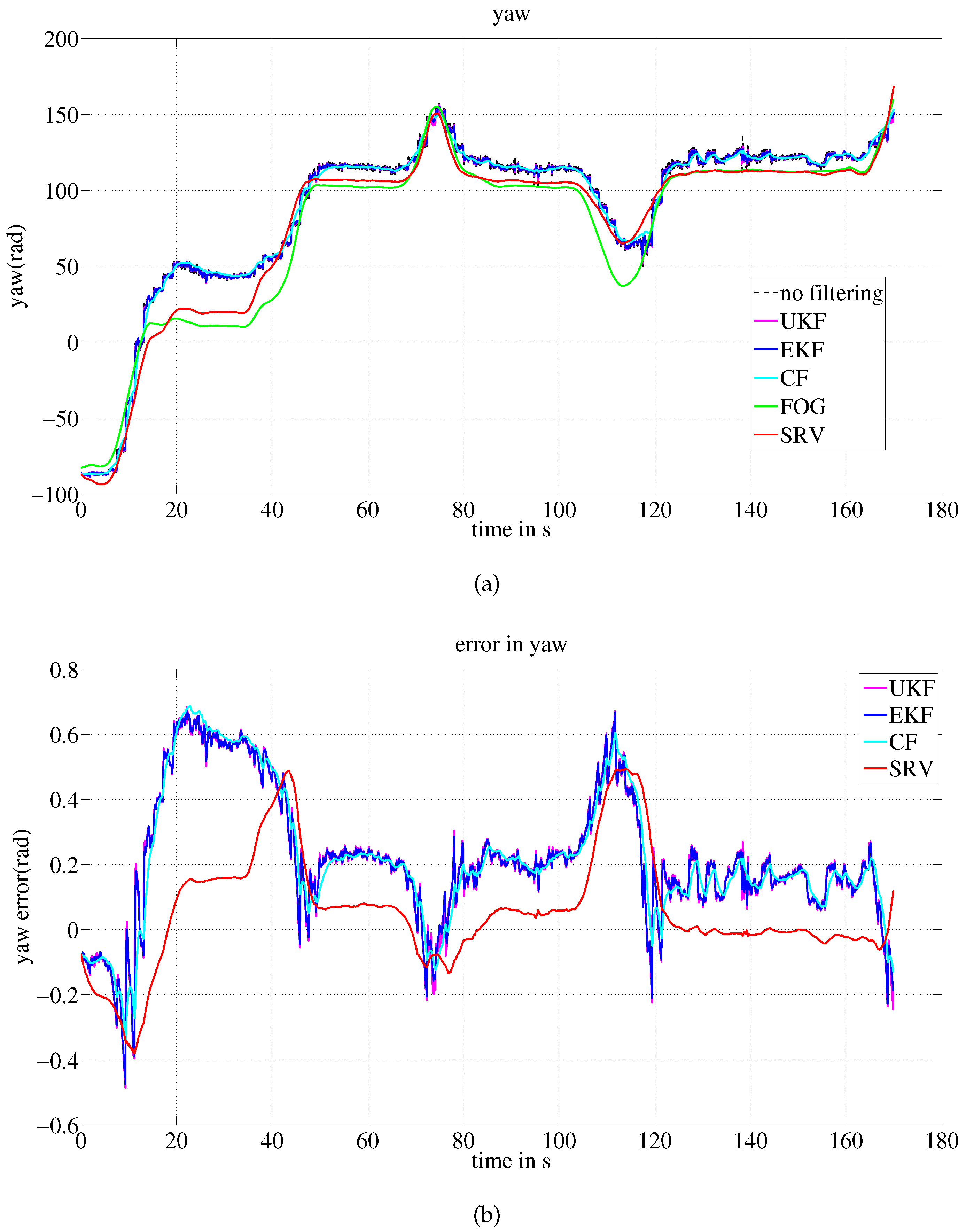
| Simulation | Statistics | SRV | EKF | UKF | CF |
|---|---|---|---|---|---|
| Simulation 1 | Average (rad) | ||||
| RMS (rad) | |||||
| distance error ratio (%) | 1.689 | 1.639 | |||
| Simulation 2 | Average (rad) | ||||
| RMS (rad) | |||||
| distance error ratio (%) | 1.489 | 0.617 |
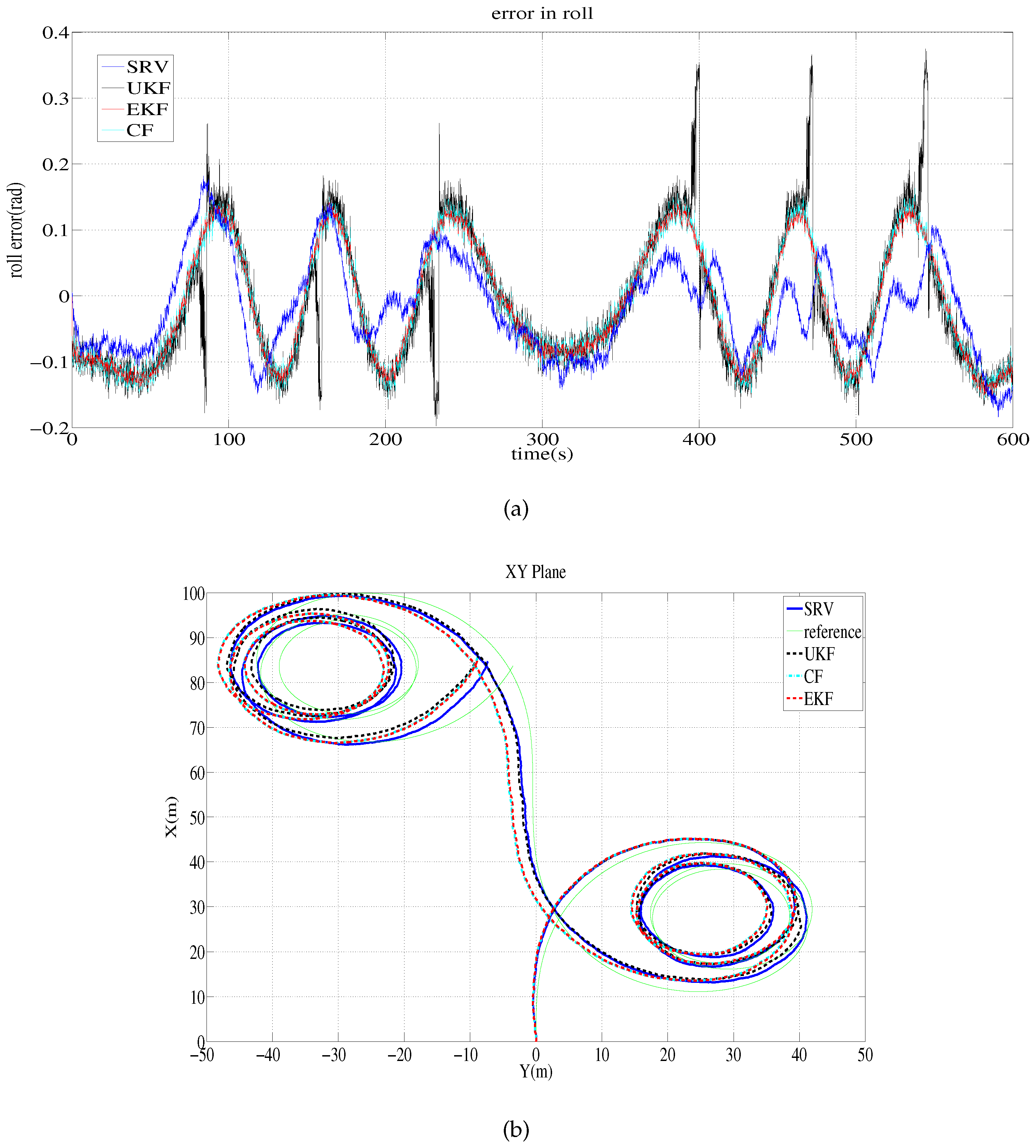
| Trajectory | Distance Error Ratio | |||
|---|---|---|---|---|
| SRV | EKF | UKF | CF | |
| Circular trajectory | 1.08% | 2.38% | 2.68% | 3.37% |
| Rectangular trajectory | 2.06% | 4.07% | 4.82% | 4.82% |
| Statistics | Error (Rad) | |||
|---|---|---|---|---|
| SRV | EKF | UKF | CF | |
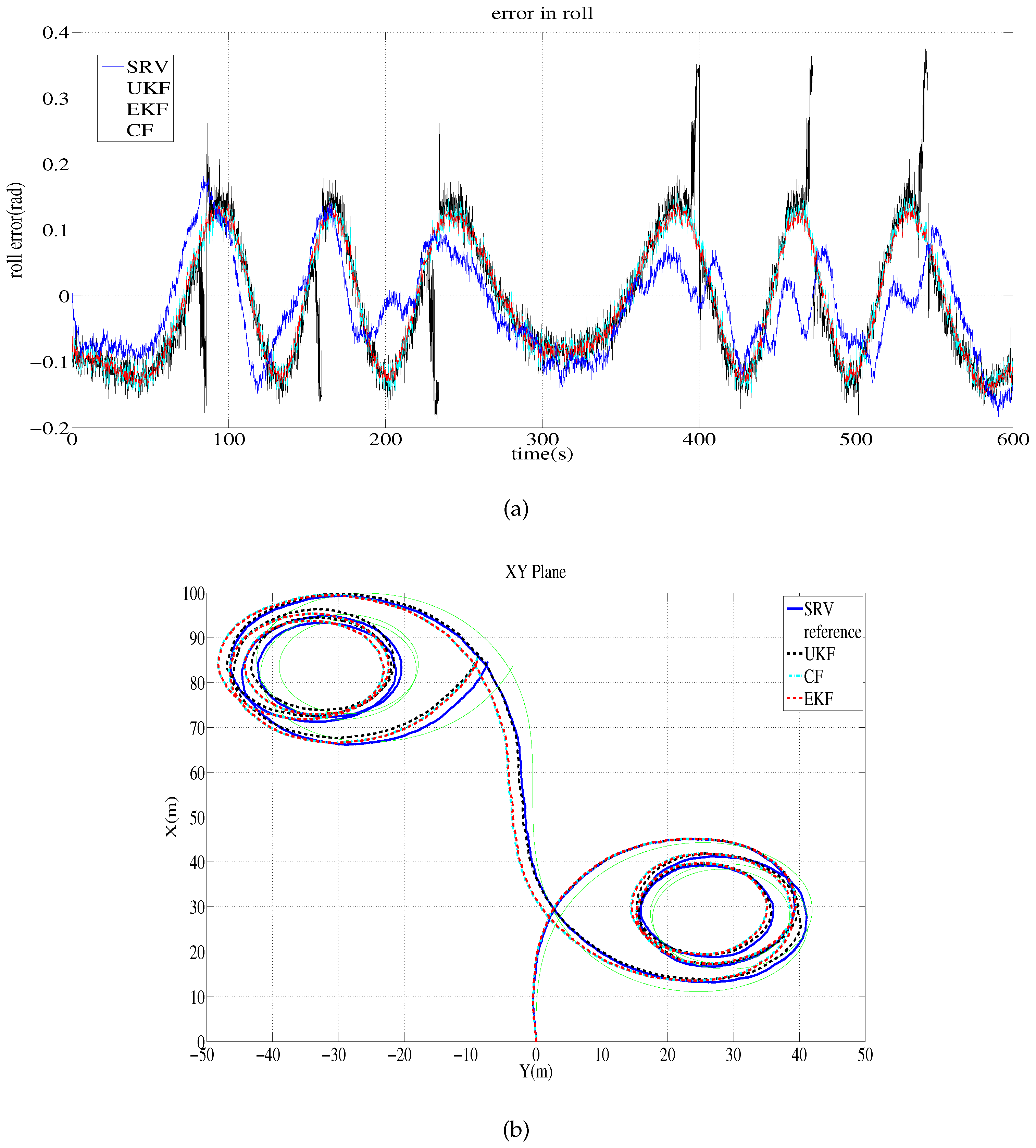
| Average | 0.1264 | 0.2494 | 0.2505 | 0.2476 |
| Root mean square error | 0.1862 | 0.2994 | 0.3001 | 0.3016 |
| Maximum error | 0.4931 | 0.6749 | 0.6826 | 0.6877 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ko, N.Y.; Jeong, S.; Bae, Y. Sine Rotation Vector Method for Attitude Estimation of an Underwater Robot. Sensors 2016, 16, 1213. https://doi.org/10.3390/s16081213
Ko NY, Jeong S, Bae Y. Sine Rotation Vector Method for Attitude Estimation of an Underwater Robot. Sensors. 2016; 16(8):1213. https://doi.org/10.3390/s16081213
Chicago/Turabian StyleKo, Nak Yong, Seokki Jeong, and Youngchul Bae. 2016. "Sine Rotation Vector Method for Attitude Estimation of an Underwater Robot" Sensors 16, no. 8: 1213. https://doi.org/10.3390/s16081213
APA StyleKo, N. Y., Jeong, S., & Bae, Y. (2016). Sine Rotation Vector Method for Attitude Estimation of an Underwater Robot. Sensors, 16(8), 1213. https://doi.org/10.3390/s16081213