
Passive Wireless Hermetic Environment Monitoring System for Spray Painting Workshop



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Circuits Design
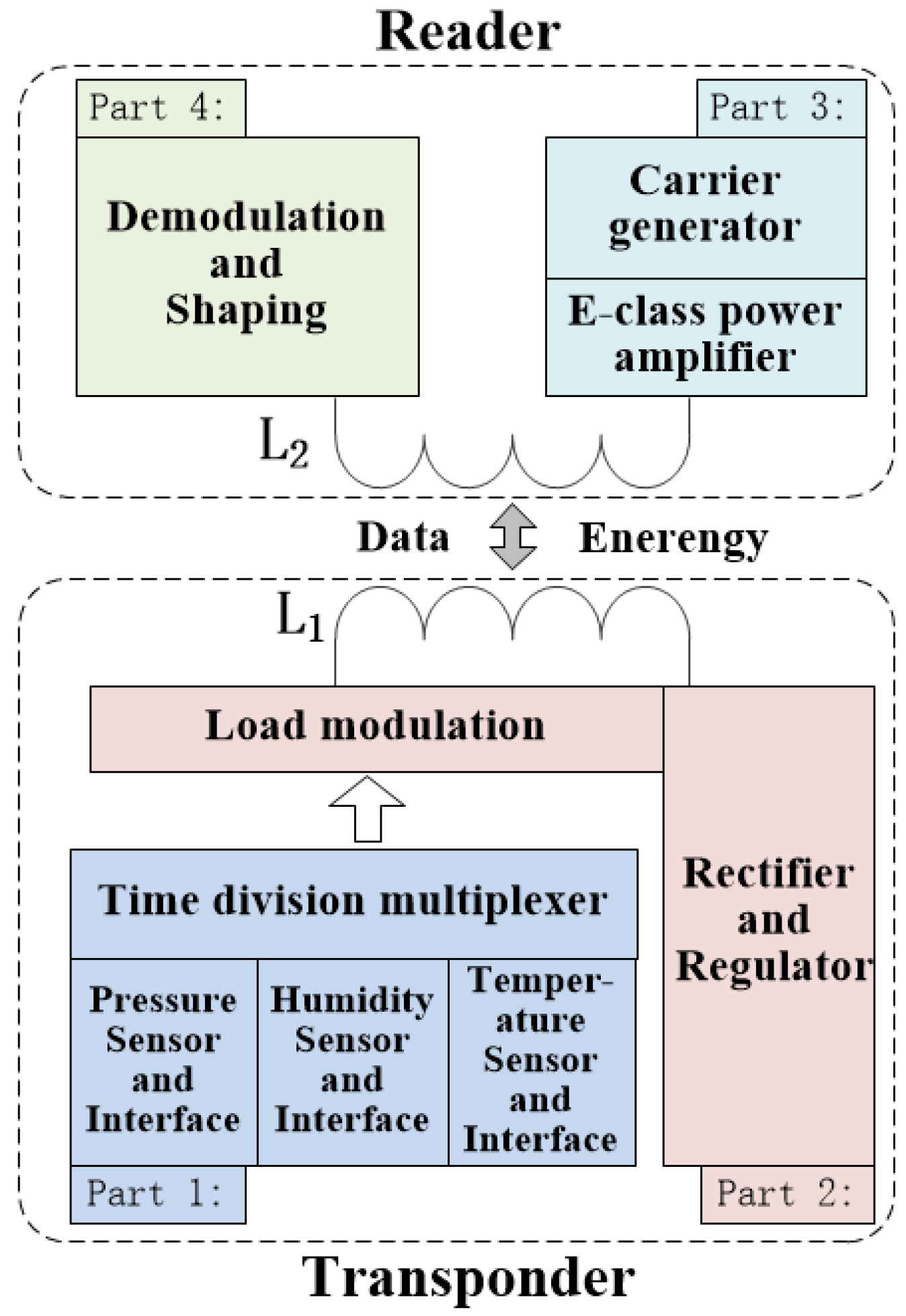
2.1. Overall Block Diagram
2.2. Design of the Transponder
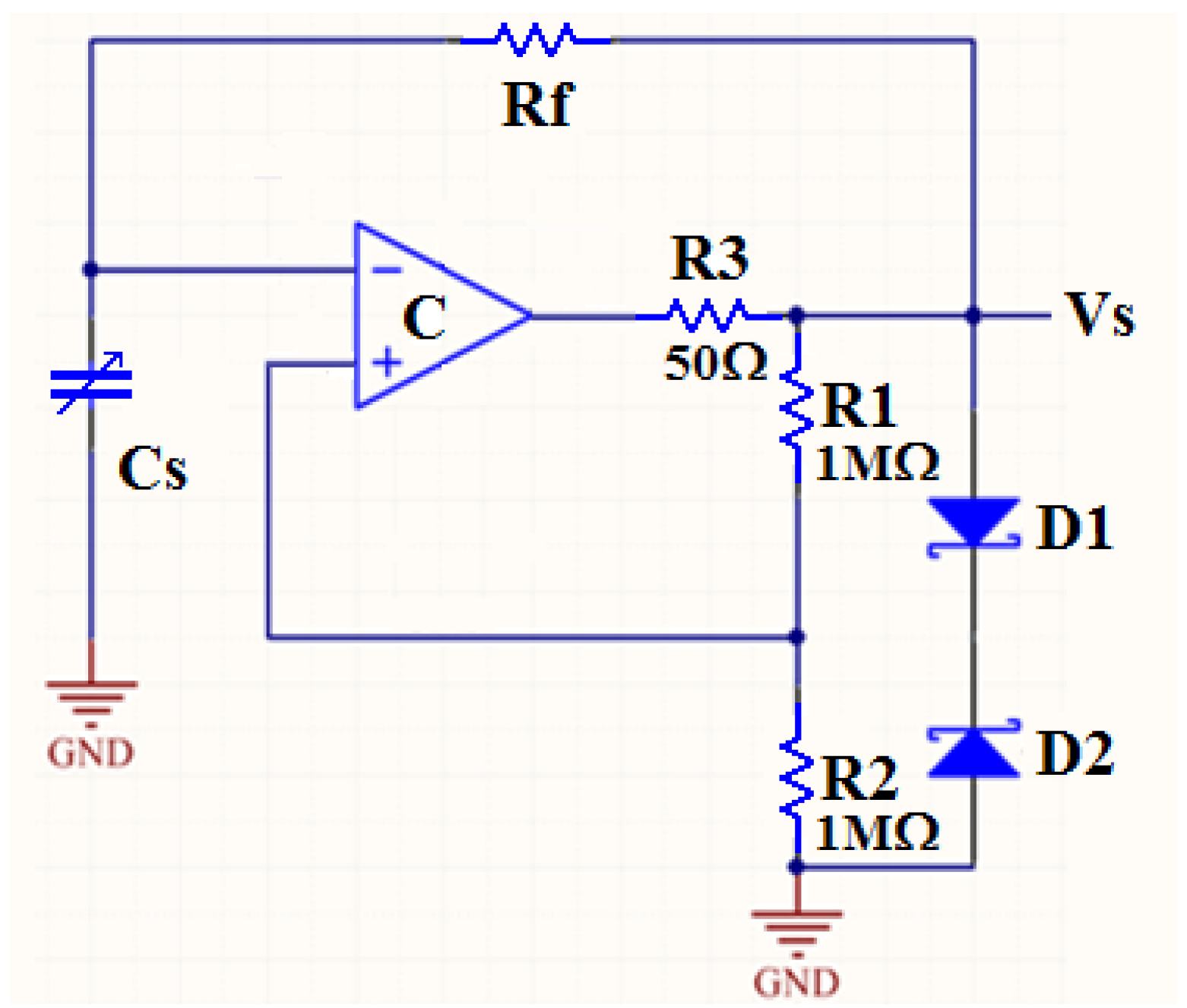
2.2.1. Part 1: Sensor Interface Circuits and Time Division Multiplexer
2.2.2. Part 2: Rectifier, Regulator, and Load Modulation Circuit
2.3 Design of the Reader
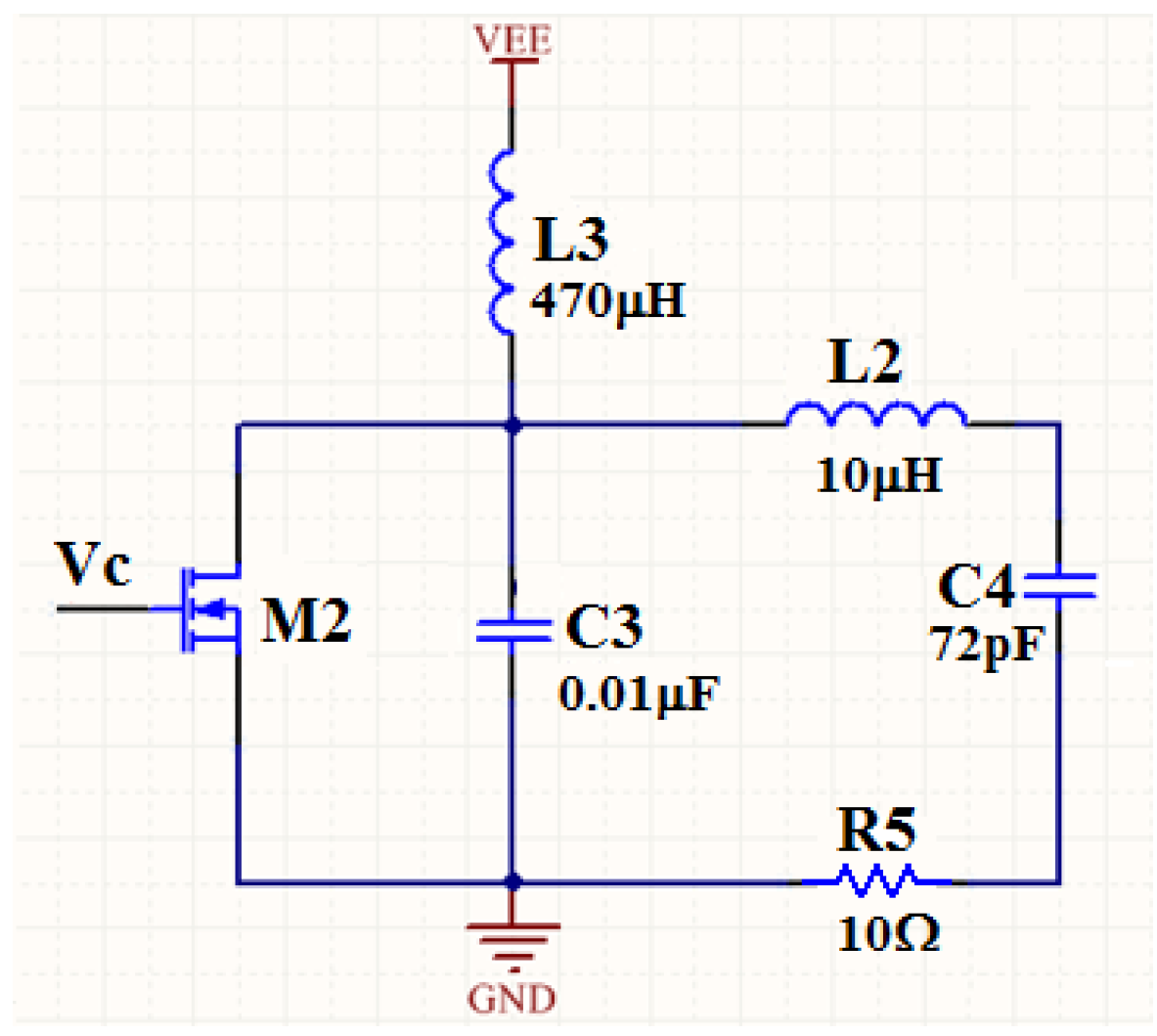
2.3.1. Part 3: Carrier Generator and E-Class Power Amplifier
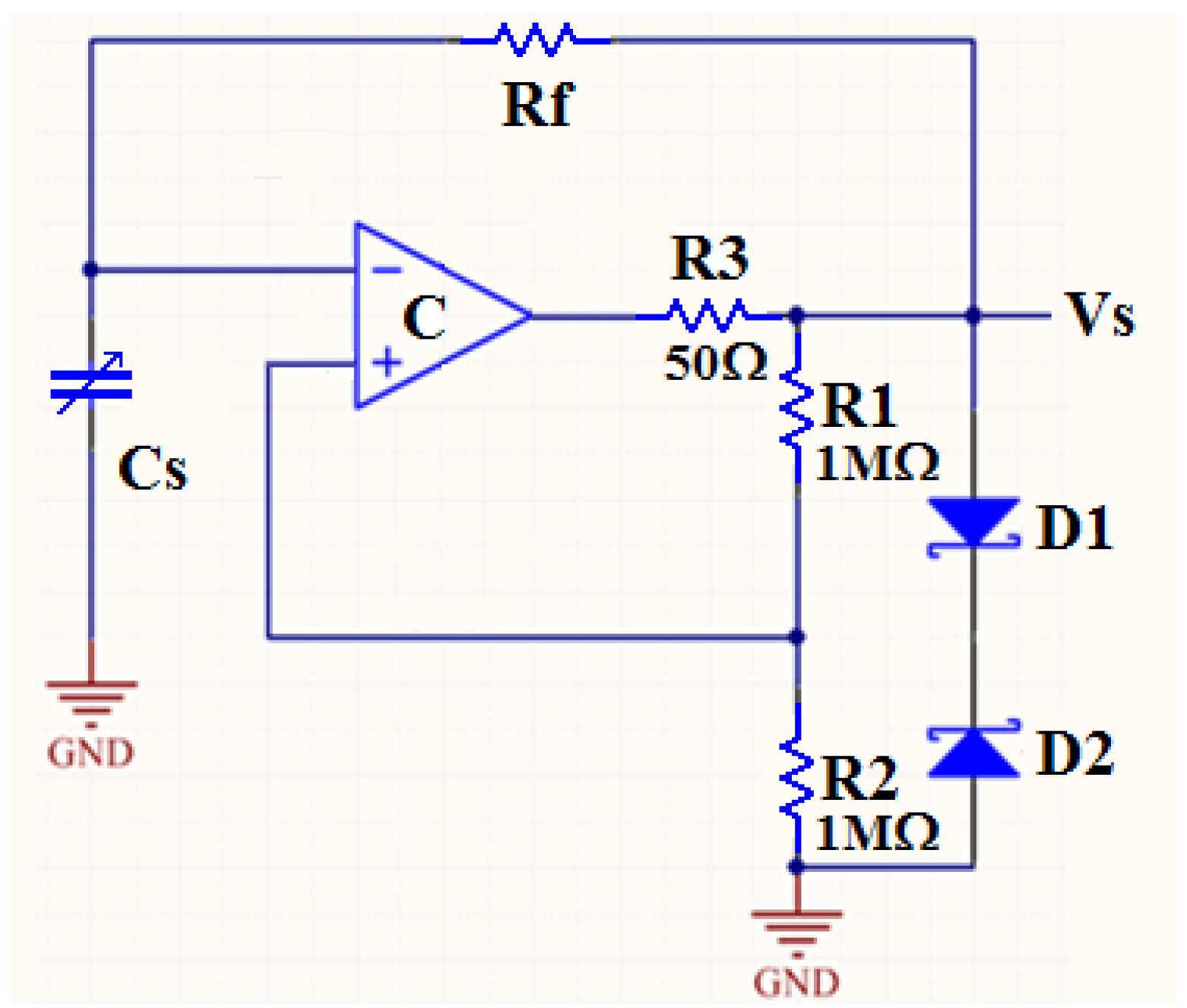
2.3.2. Part 4: Demodulation and Shaping Circuits
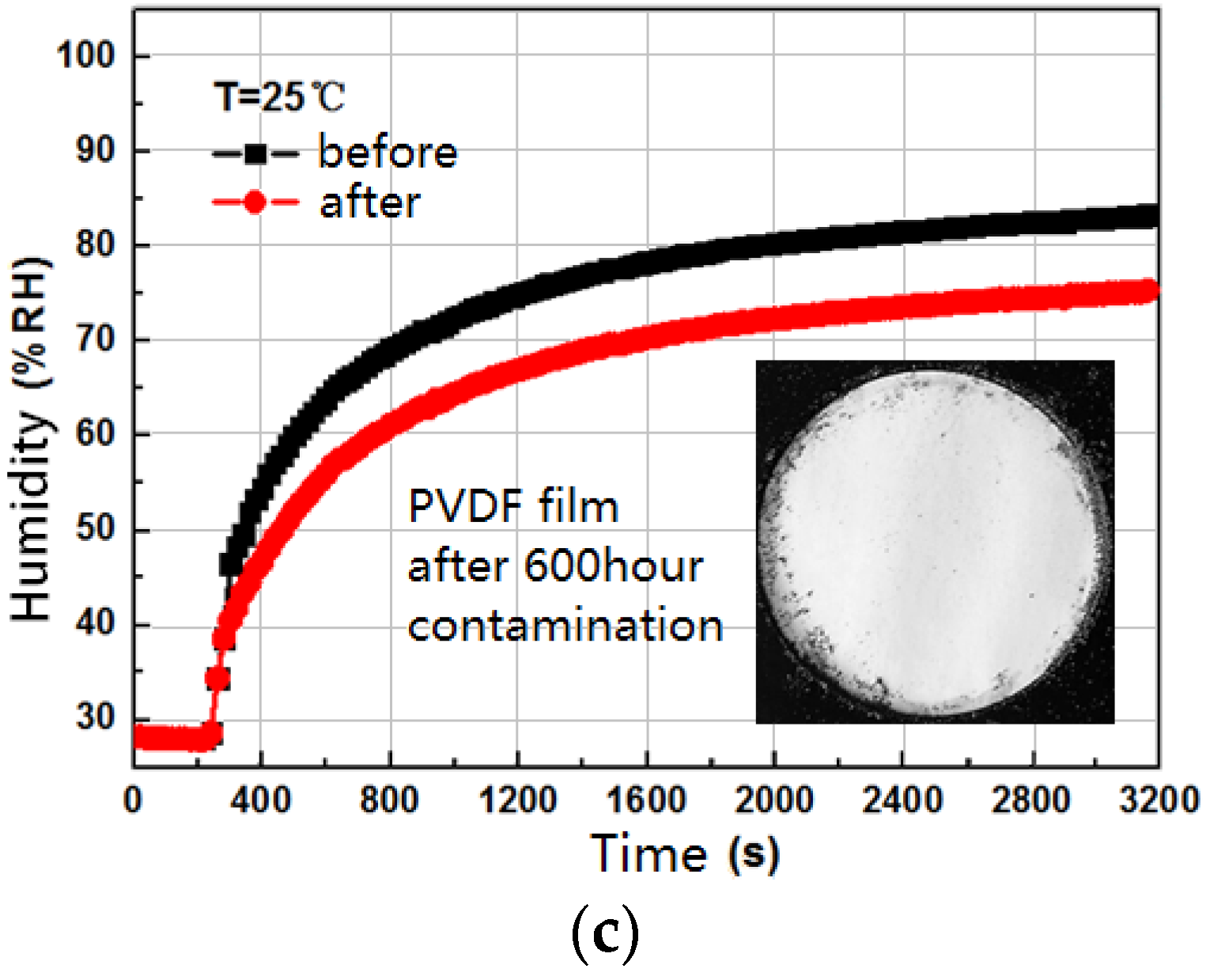
3. Package of the Transponder
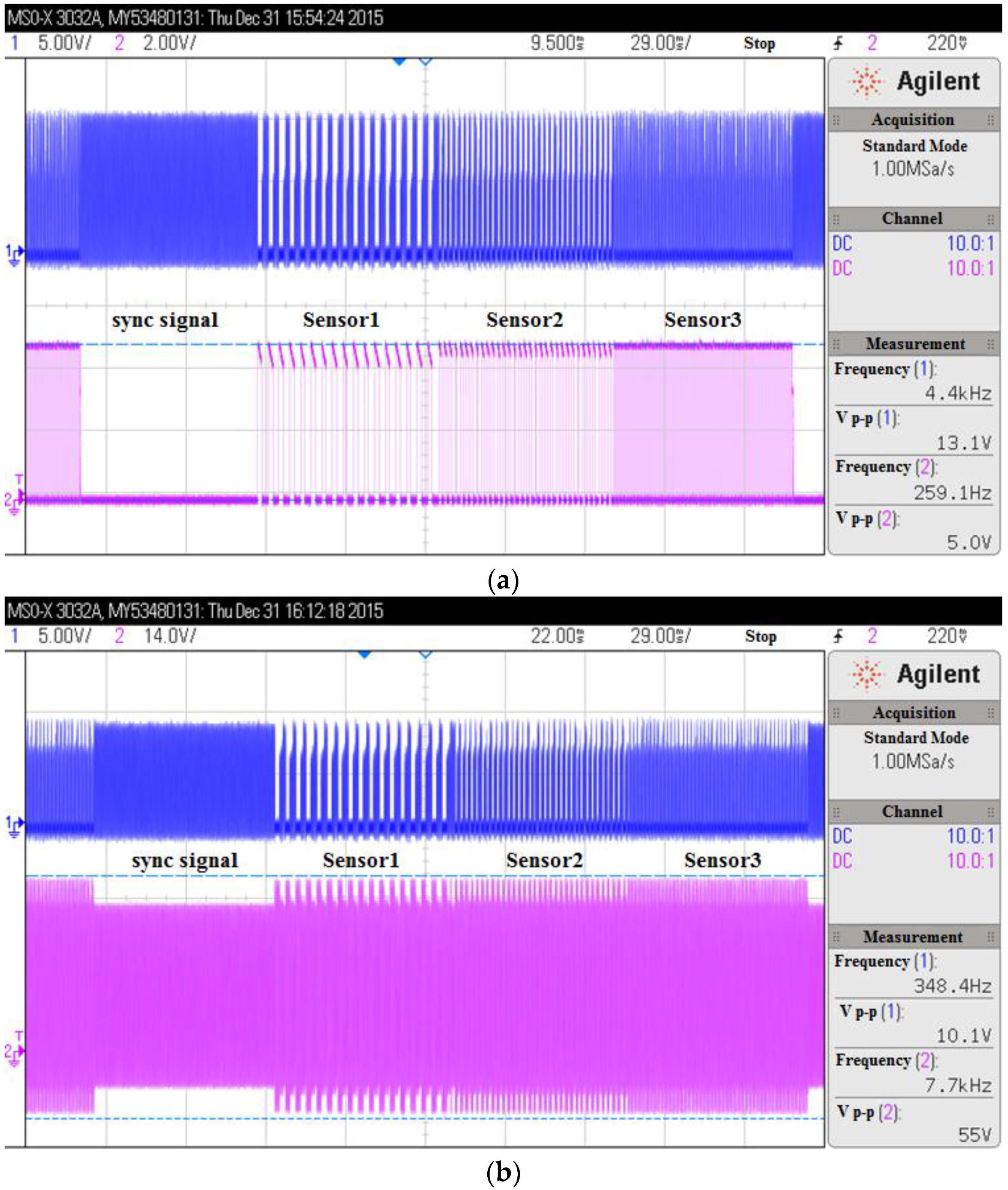
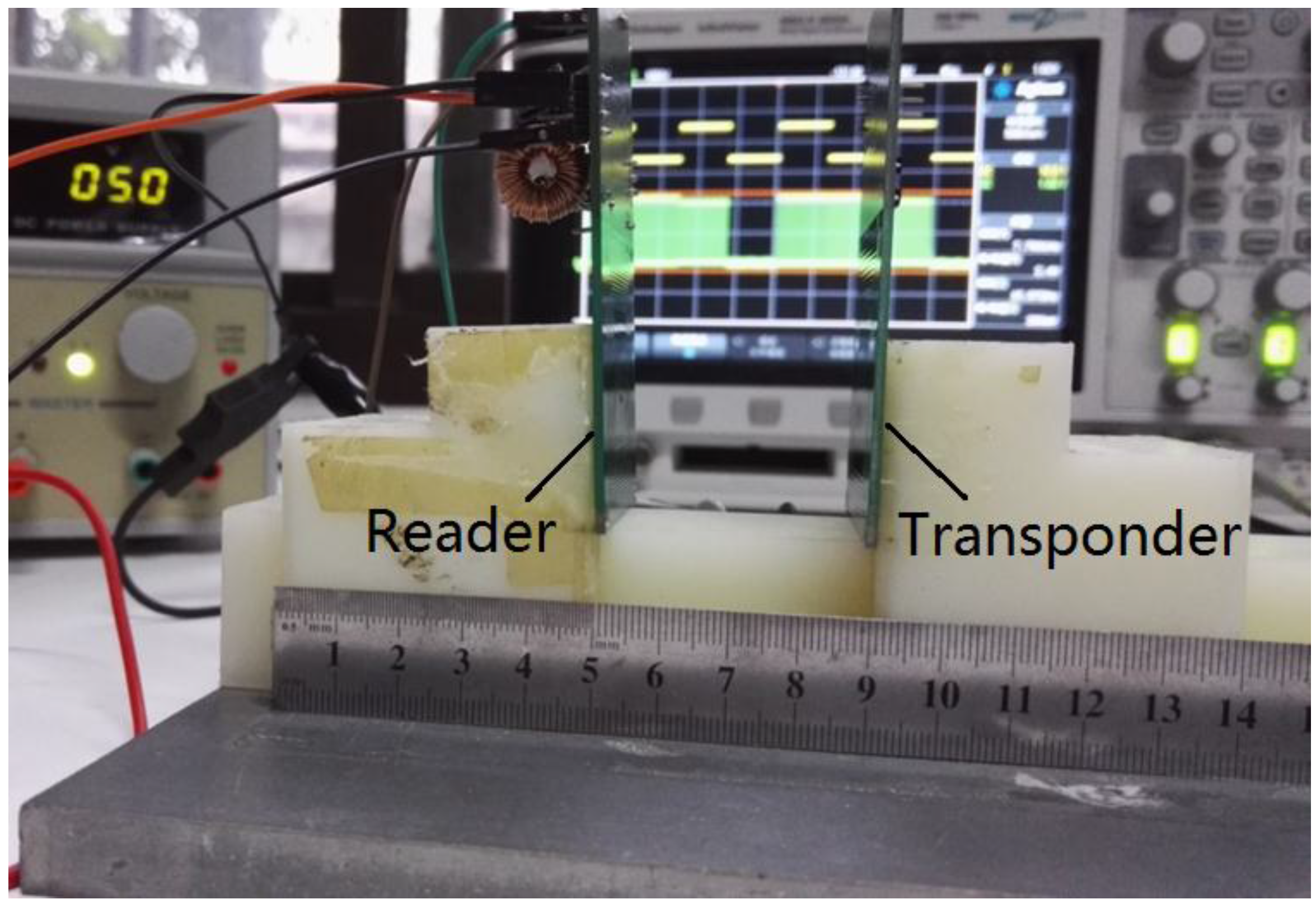
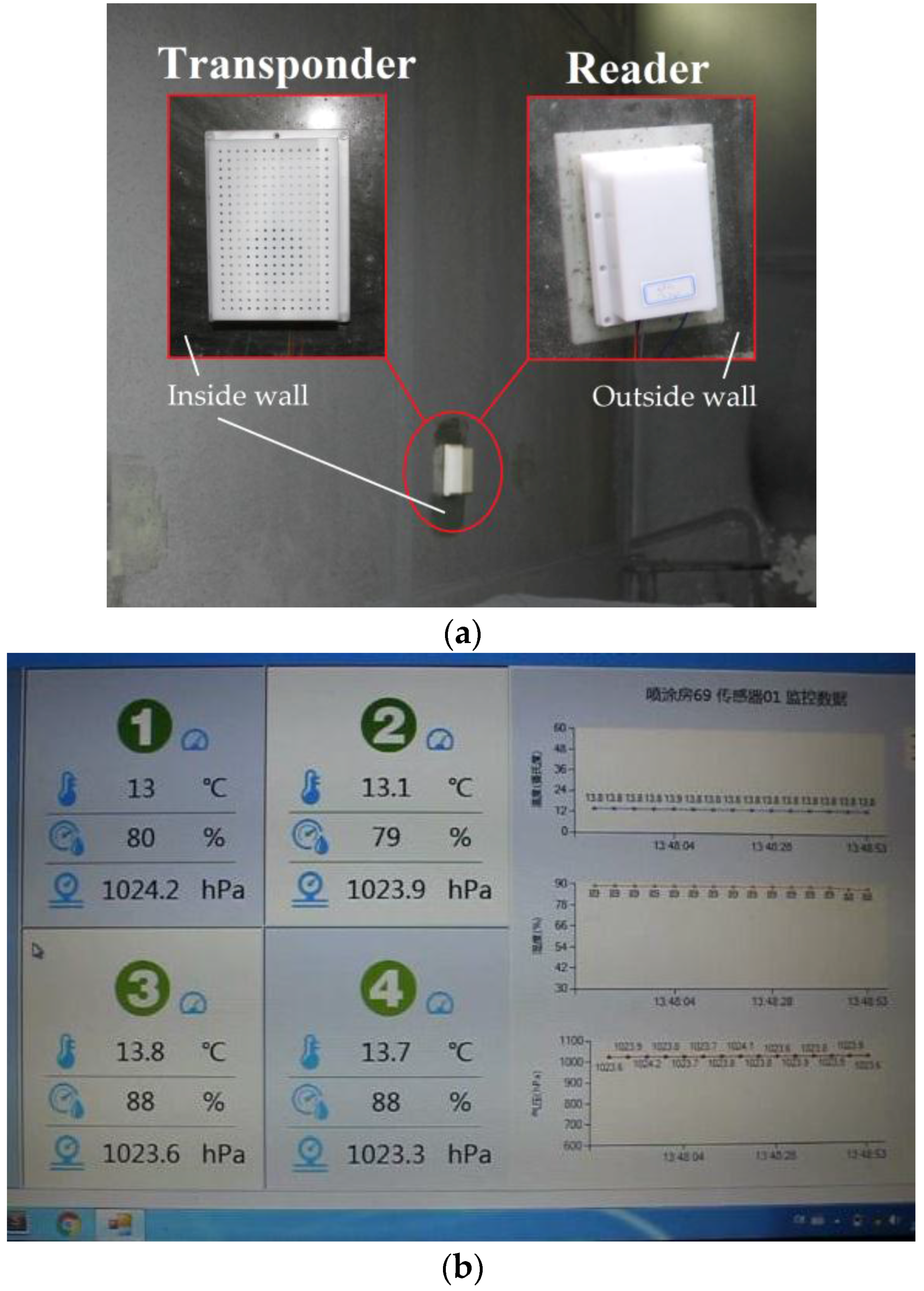
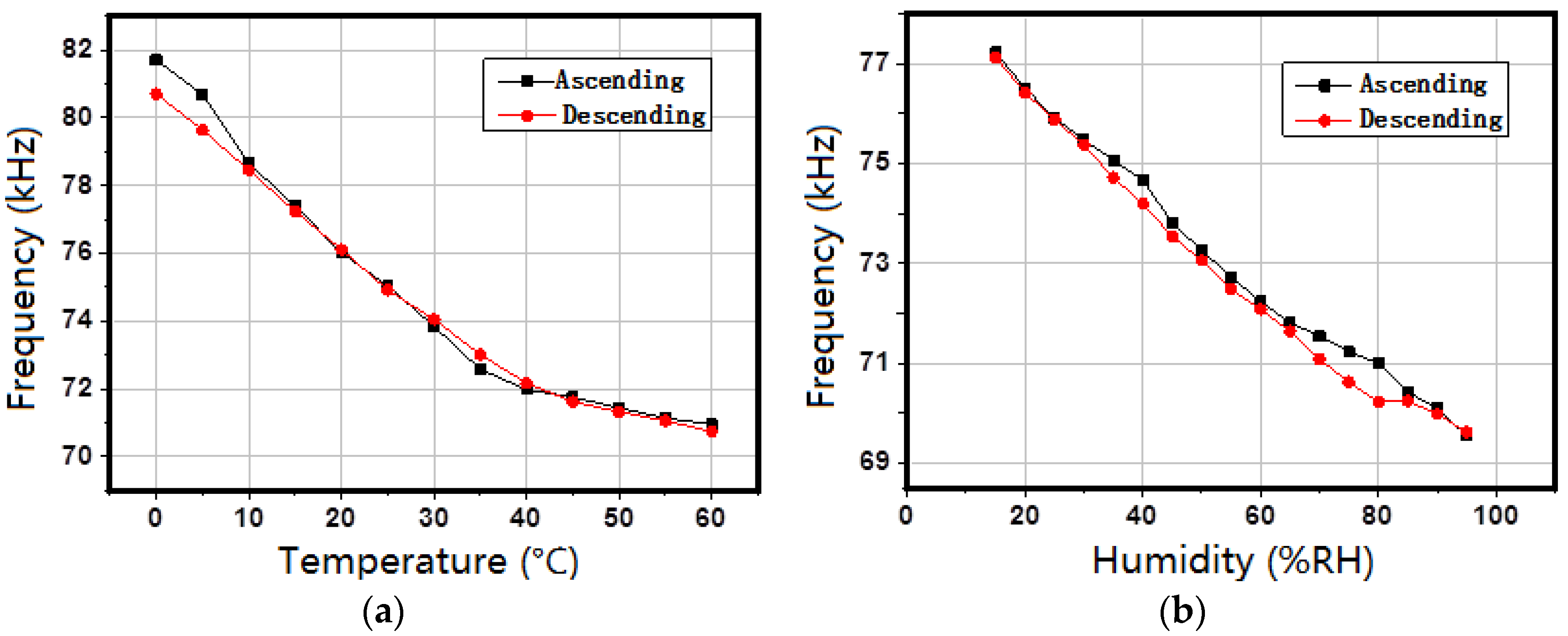
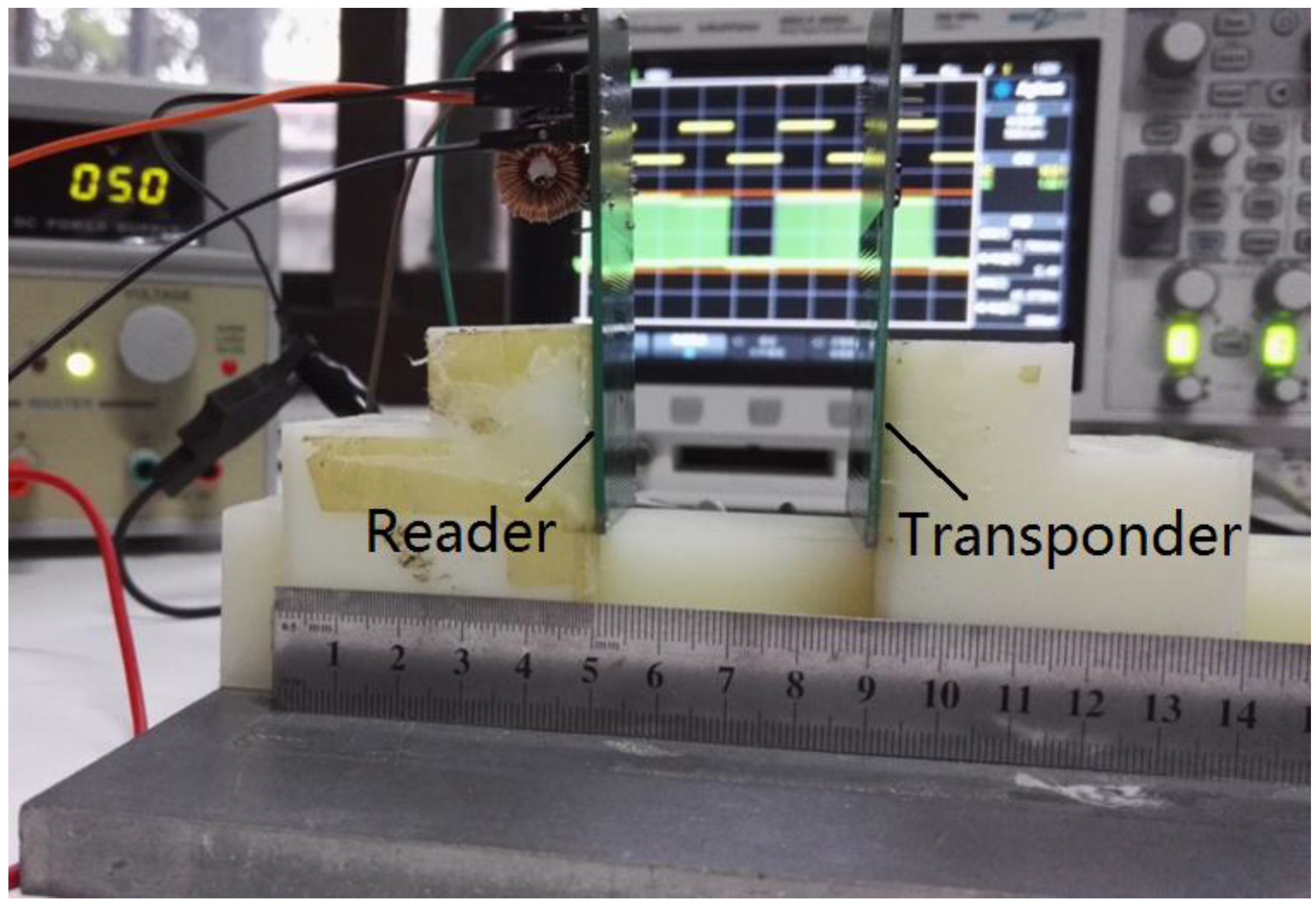
4. Measurement and Demonstration
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bogue, R. Recent developments in MEMS sensors: A review of applications, markets and technologies. Sens. Rev. 2013, 33, 300–304. [Google Scholar] [CrossRef]
- Wang, Y.; Jia, Y.; Chen, Q.; Wang, Y. A Passive Wireless Temperature Sensor for Harsh Environment Applications. Sensors 2008, 8, 7982–7995. [Google Scholar] [CrossRef]
- Wilson, W.C.; Atkinson, G.M. Passive wireless sensor applications for NASA’s extreme aeronautical environments. IEEE Sens. J. 2014, 14, 3745–3753. [Google Scholar] [CrossRef]
- Tan, Q.; Kang, H.; Xiong, J.; Qin, L.; Zhang, W.; Li, C.; Ding, L.; Zhang, X.; Yang, M. A Wireless Passive Pressure Microsensor Fabricated in HTCC MEMS Technology for Harsh Environments. Sensors 2013, 13, 9896–9908. [Google Scholar] [CrossRef] [PubMed]
- Tumanski, S. Induction coil sensors—A review. Meas. Sci. Technol. 2007, 18, R31–R46. [Google Scholar] [CrossRef]
- Collins, C.C. Miniature passive pressure transensor for implanting in the eye. IEEE Trans. Biomed. Eng. 1967, 14, 74–83. [Google Scholar] [CrossRef] [PubMed]
- Schuylenbergh, K.V.; Puers, R. Passive telemetry by harmonics detection. In Proceedings of the 18th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 1996. Bridging Disciplines for Biomedicine, Amsterdam, The Netherlands, 31 October–3 November 1996; pp. 299–300.
- Bhadra, S.; Blunt, W.; Dynowski, C.; McDonald, M.; Thomson, D.J.; Freund, M.S.; Cicek, N.; Bridges, G.E. Fluid embeddable coupled coil sensor for wireless pH monitoring in a bioreactor. IEEE Trans. Instrum. Meas. 2014, 63, 1337–1346. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, L.; Wang, L.F.; Huang, J.Q.; Huang, Q.A. Passive wireless integrated humidity sensor based on dual-layer spiral inductors. Electron. Lett. 2014, 50, 1287–1289. [Google Scholar] [CrossRef]
- Ma, M.; Liu, Z.; Shan, W.; Li, Y.; Kalantar-zadeh, K.; Wlodarski, W. Passive wireless gas sensors based on the LTCC technique. In Proceedings of the 2015 IEEE MTT-S International Microwave Workshop Series on Advanced Materials and Processes for RF and THz Applications (IMWS-AMP), Suzhou, China, 1–3 July 2015; pp. 1–3.
- Aschenbrenner, B.; Zagar, B.G. Analysis and validation of a planar high-frequency contactless absolute inductive position sensor. IEEE Trans. Instrum. Meas. 2015, 64, 768–775. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.F.; Huang, J.Q.; Huang, Q.A. An LC-type passive wireless humidity sensor system with portable telemetry unit. J. Microelectromech. Syst. 2015, 24, 575–581. [Google Scholar] [CrossRef]
- Tan, Q.; Luo, T.; Xiong, J.; Kang, H.; Ji, X.; Zhang, Y.; Yang, M.; Wang, X.; Xue, C.; Liu, J.; et al. A harsh environment-oriented wireless passive temperature sensor realized by LTCC technology. Sensors 2014, 14, 4154–4166. [Google Scholar] [CrossRef] [PubMed]
- Malocha, D.C.; Gallagher, M.; Fisher, B.; Humphries, J.; Gallagher, D.; Kozlovski, N. A Passive Wireless Multi-Sensor SAW Technology Device and System Perspectives. Sensors 2013, 13, 5897–5922. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Wang, L.F.; Huang, Q.A. Implementation of Multiparameter Monitoring by an LC-Type Passive Wireless Sensor Through Specific Winding Stacked Inductors. IEEE Int. Things J. 2015, 2, 168–174. [Google Scholar] [CrossRef]
- DeRouin, A.; Ong, K.G. Multi-parameter sensing with a single magnetoelastic sensor by applying loads on the null locations of multiple resonant modes. Smart Mater. Struct. 2015, 25, 035044. [Google Scholar] [CrossRef]
- DeHennis, A.D.; Wise, K.D. A wireless microsystem for the remote sensing of pressure, temperature, and relative humidity. J. Microelectromech. Syst. 2005, 14, 12–22. [Google Scholar] [CrossRef]
- Chaimanonart, N.; Suster, M.A.; Young, D.J. Two-Channel passive data telemetry with remote RF powering for High-Performance wireless and batteryless strain sensing microsystem applications. IEEE Sens. J. 2009, 10, 1375–1382. [Google Scholar] [CrossRef]
- Kang, H.G.; Chen, D.Q.; Zhang, L. Fundamentals of Electronic Technology, Analog Part, 6th ed.; Higher Education Press: Beijing, China, 2013; pp. 462–464. (In Chinese) [Google Scholar]
- TPS715xx Datasheet, Texas Instruments Incorporated. Available online: http://www.ti.com (accessed on 1 November 2014).
- Shanmugam, K.S. Digital and Analog Communication Systems; John Wiley & Sons Inc.: New York, NY, USA, 1979. [Google Scholar]
- LTC6900 Datasheet, Linear Technology Corporation. Available online: http://www.linear.com (accessed on 1 November 2014).
- Ren, Q.Y.; Wang, L.F.; Huang, J.Q.; Zhang, C.; Huang, Q.A. A Novel Capacitive Temperature Sensor for a Lab-on-a-chip System. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 436–439.
- SCB10H Series Pressure Elements Datasheet, VTI Technologies. Available online: http://www.vti.fi (accessed on 1 September 2014).
- Busico, V.; Cipullo, R. Microstructure of polypropylene. Prog. Polym. Sci. 2001, 26, 443–533. [Google Scholar] [CrossRef]
- Mauritz, K.A.; Moore, R.B. State of understanding of Nafion. Chem. Rev. 2004, 104, 4535–4585. [Google Scholar] [CrossRef] [PubMed]






© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Ma, J.; Huang, Y.; Tang, D.; Huang, Q.-A. Passive Wireless Hermetic Environment Monitoring System for Spray Painting Workshop. Sensors 2016, 16, 1207. https://doi.org/10.3390/s16081207
Wang L, Ma J, Huang Y, Tang D, Huang Q-A. Passive Wireless Hermetic Environment Monitoring System for Spray Painting Workshop. Sensors. 2016; 16(8):1207. https://doi.org/10.3390/s16081207
Chicago/Turabian StyleWang, Lifeng, Jingjing Ma, Yan Huang, Dan Tang, and Qing-An Huang. 2016. "Passive Wireless Hermetic Environment Monitoring System for Spray Painting Workshop" Sensors 16, no. 8: 1207. https://doi.org/10.3390/s16081207
APA StyleWang, L., Ma, J., Huang, Y., Tang, D., & Huang, Q.-A. (2016). Passive Wireless Hermetic Environment Monitoring System for Spray Painting Workshop. Sensors, 16(8), 1207. https://doi.org/10.3390/s16081207