2.1. Real-Time Orbit Determination and Prediction Method
The motion of an Earth orbiting object is generally described by the following equation:
where
,
, and
are the position, velocity, and acceleration vectors of the object in an Earth-centered inertial coordinate system,
is the vector of force model parameters, and
is the vector of the force per unit mass exerted on the object.
For LEO space objects, the following forces are usually included in the orbit computation: the Earth’s gravity, solar-lunar and planetary gravities, air drag, solar radiation pressure, and the Earth tidal forces, including the solid Earth and ocean tides.
For many geodetic and geophysics applications, such as satellite altimetry measuring sea-level variations, orbit information of centimeter accuracy is required, and it can be provided through the precise orbit determination (POD) procedure in which accurate and densely-distributed observations are processed [
12,
13,
14]. When the accuracy of the dense tracking observations, like GPS carrier phases [
15] or SLR data [
16] is in the order of millimeters, the resultant POD accuracy is in the order of centimeters [
17,
18].
For applications in the space situational awareness, people are generally more concerned with the OP accuracy of space debris. Although the OP of many debris objects can be computed using the publicly-available TLE with SGP4 algorithm [
19], its accuracy should be improved in order to meet more advanced requirements; for example, accurate and reliable space collision warning. Such improvement would be achieved through either the use of more quality tracking data, or the refinement of perturbing force models, or both of them.
For the DLR operations, the purpose of the real-time OD using angular data over a short-arc is to generate OP from the last observation epoch to the end of pass, and that the generated OP is accurate enough for the DLR telescope pointing and distance between the tracking station and the debris. To make the transition from the optical tracking to the DLR as fast as possible, one would demand the OD use as little angular data of the object as possible. It is well known, however, when only angular data over a short orbit arc is available, the OD computation would not converge because of the poor distribution of tracking data and the unknown ballistic coefficient of the object [
20,
21,
22]. To achieve the OD convergence, extra information has to be used in the OD computation. In the case of debris optical or laser tracking, the most likely available extra information is the TLE of the debris, which can be downloaded from the North American Aerospace Defense Command (NORAD) catalogue [
23]. The TLEs are widely used to propagate the orbits of space objects to any moment with the SGP4 algorithm. Therefore, the TLE-computed positions can be used as extra information or pseudo-observations, in addition to the collected short-arc angular data, to achieve the OD convergence [
24]. The TLE of a debris object may be updated each day. In practice, one usually uses the latest TLE to propagate orbits since the latest TLE is usually more accurate than earlier TLEs.
Given a set of TLEs, one can compute the position at any moment using the SGP4 algorithm. Considering that the angular data is only available over a short orbit arc, and the use of TLE-computed positions is mainly to achieve the OD convergence, one should not use more-than-necessary TLE-computed positions. The overuse of the TLE-computed positions would cause the OD results to be biased toward the inaccurate TLE orbit. Earlier experiences [
23] have shown that the TLE-computed positions every 10 min within the OD span are sufficient to help achieve the OD convergence in case only the angular data over a short orbit arc is available.
The OD problem discussed in the paper can now be formulated as: for a debris object to be laser ranged, given its angular observations collected over a short-arc, and a set of its latest TLE prior to the tracking time, the OD is performed in a specified OD span in real-time using the angular data and TLE-computed positions as observations, and the subsequent OP is sufficiently accurate for blind DLR operations to the debris object.
When the OD span is set, the positions every 10 min are first computed from the latest TLE, and are used as pseudo-observations. Assume that n pseudo-observations, , are available, and the weight for each of these positional observations is . Each position has three components in X, Y, and Z, and they are treated equally.
The other observations are the angles data of the objects, which can be in the form of azimuth and elevation, or topocentric right ascension and declination. Assume that
m azimuth/elevation observations,
, are available, and the weight of each observation is
. The relationship between the azimuth/elevation and the positions of the space object and ground tracking station can be found in [
25].
With the above observations and their weights as input to an iterative least-squares (LS) OD program, the initial state vector (position and velocity vectors at the start of the OD span) of the object, as well as force model parameters, can be adjusted to minimize the observational residuals in the least-squares sense. That is, the weighted sum of squares of the residuals (WSSR) of the observations
is minimized, where the observational residuals are computed as:
The computed value, , of the corresponding observation is computed from the integrated positions of the object. In the OD program, the 11-order Cowell numerical orbit integration method is used for orbit propagation with an integration step size 30 s. The TLE of the object is used to compute the initial state vector for the OD process.
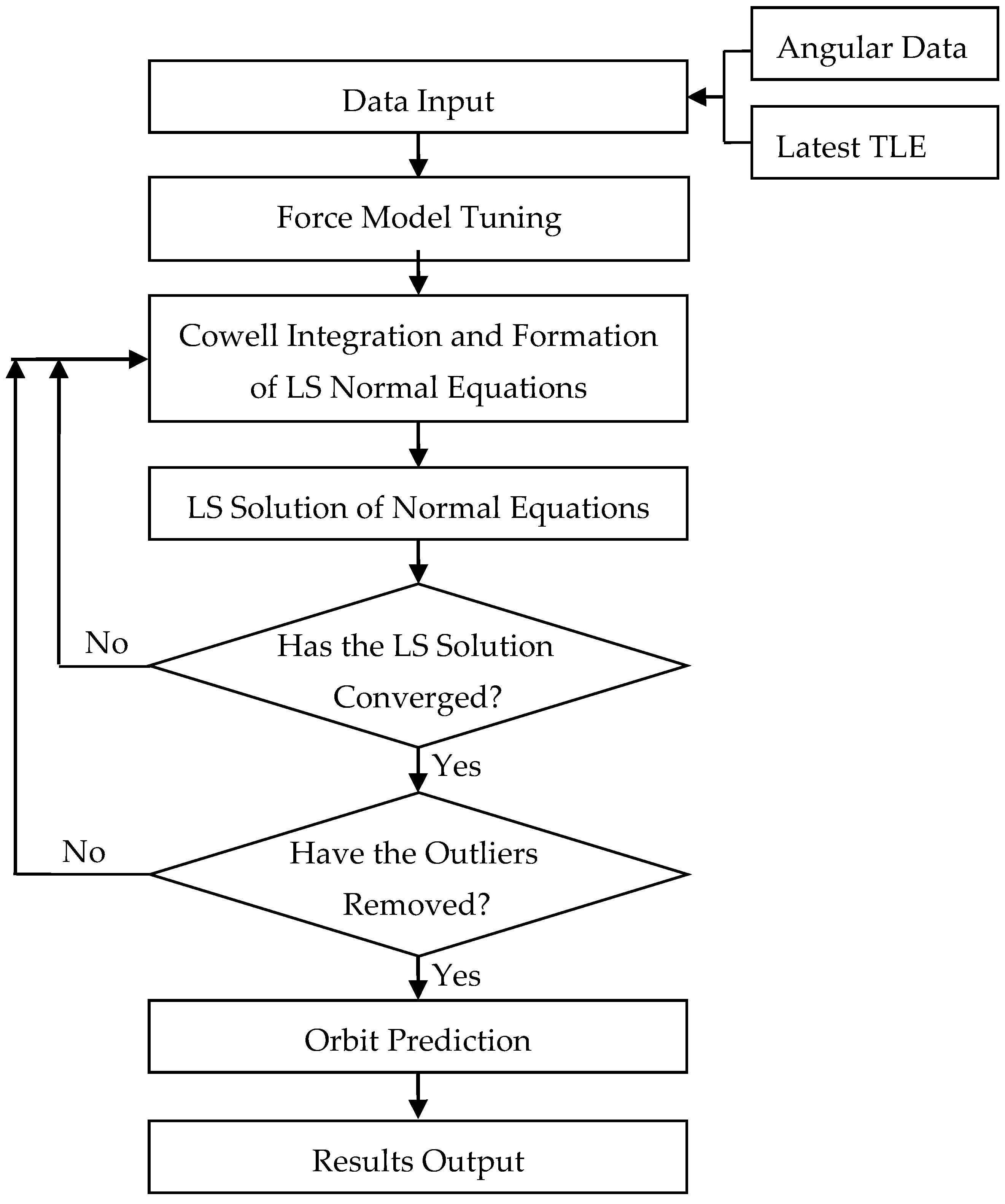
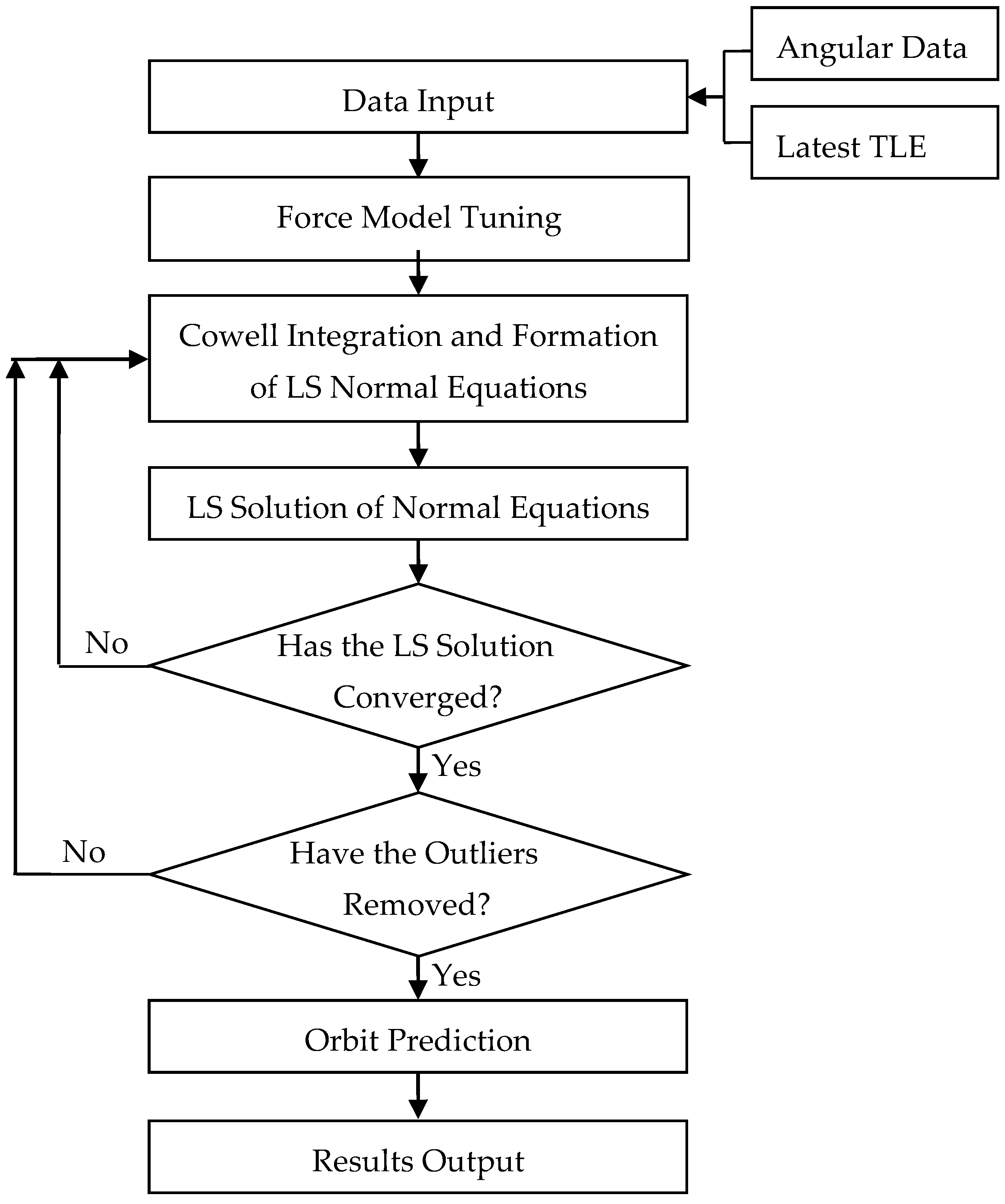
The OD process is considered converged when changes in the initial state vector and estimated force model parameters (if applicable) are less than preset values. After the OD convergence, an outlier detection procedure is applied to make sure no observation with gross error is used in the OD computation. In the outlier detection, TLE-computed positions and the angular observations are treated separately as two groups. For each group, the RMS of the residuals is computed first, and then each residual is checked against three times the RMS value. When the absolute value of a residual is larger than the three times the RMS value, the corresponding observation is marked. If there exists any outlier in the observations, the OD process is repeated in which the marked observations are not used. After the above OD process, the orbit is propagated until the end of the pass end, and the OP results are delivered to the DLR system.
The flowchart of the OD/OP process using the TLE-computed positions and angular observations is shown in
Figure 1.
The accuracy of the angular data is usually at the level of 2″–5″ [
7], which is equivalent to 10–25 m at a distance of 1000 km. The accuracy of the TLE-computed positions is usually at hundreds of meters [
10,
26]. This raises the question on how to assign appropriate weights to the angular data and TLE-computed positions in the OD computation. As mentioned before, the use of TLE-computed positions is to help the OD process converge. Therefore, the TLE-computed positions should not be overused to avoid the OD results biased toward the TLE, and this is achieved by the adjustment of the weight assigned to the TLE-computed positions in the proposed algorithm. In the algorithm design, the OD span is fixed to 12 h (see next paragraph). This means the number of the TLE-computed positions used in the OD computation is fixed since the positions are computed every 10 min. On the other hand, the number of angular observations and the geometrical strength of the collective observations mainly depend on the length of the orbit arc over which the optical data is collected. Therefore, when a shorter arc, for example, 30 s, is optically tracked, the weight assigned to the TLE-computed positions should be smaller than that when a longer arc is optically tracked. Experiments have shown that when the optical tracking arc is 30 s, a weight of 10
−17 for the TLE-computed positions is appropriate in term of the OP accuracy; while a weight of 10
−16 is appropriate when the optical tracking arc is 60 s or longer. The weight for the angular data is set 1.0. Although there is still space to improve the OP accuracy by the adjust of the weight for the TLE-computed positions, the pursue for that improvement is not made because this paper is focused on whether the proposed algorithm can generate OP results with the accuracy required by the smooth transition from the optical tracking to laser ranging.
For the tracking purpose, the OD and OP computation has to be completed in real-time. This would require the OD span be short to save computation time but long enough to guarantee the OD convergence and accuracy. Experiments have shown that if the OD span is set starting 12 h before the tracking time and ending at the last observation epoch, both the OD convergence and accuracy are achieved.
In a short summary, when only the angular data over a short arc of less than 2 min is available, the TLE-computed positions at 10 min interval will be used as pseudo-observations in the OD computation, with a weight of 10−16–10−17. The OD span is about 12 h long, ending at the last observation epoch.
2.2. Force Model Consideration
When a large volume of data over a long time span is processed, the POD computation could take minutes to converge and, thus, is not suitable for real-time applications. A breakdown of the POD computation time reveals that most of the time is spent on the computation of the perturbing accelerations from the Earth’s gravity and the atmospheric drag.
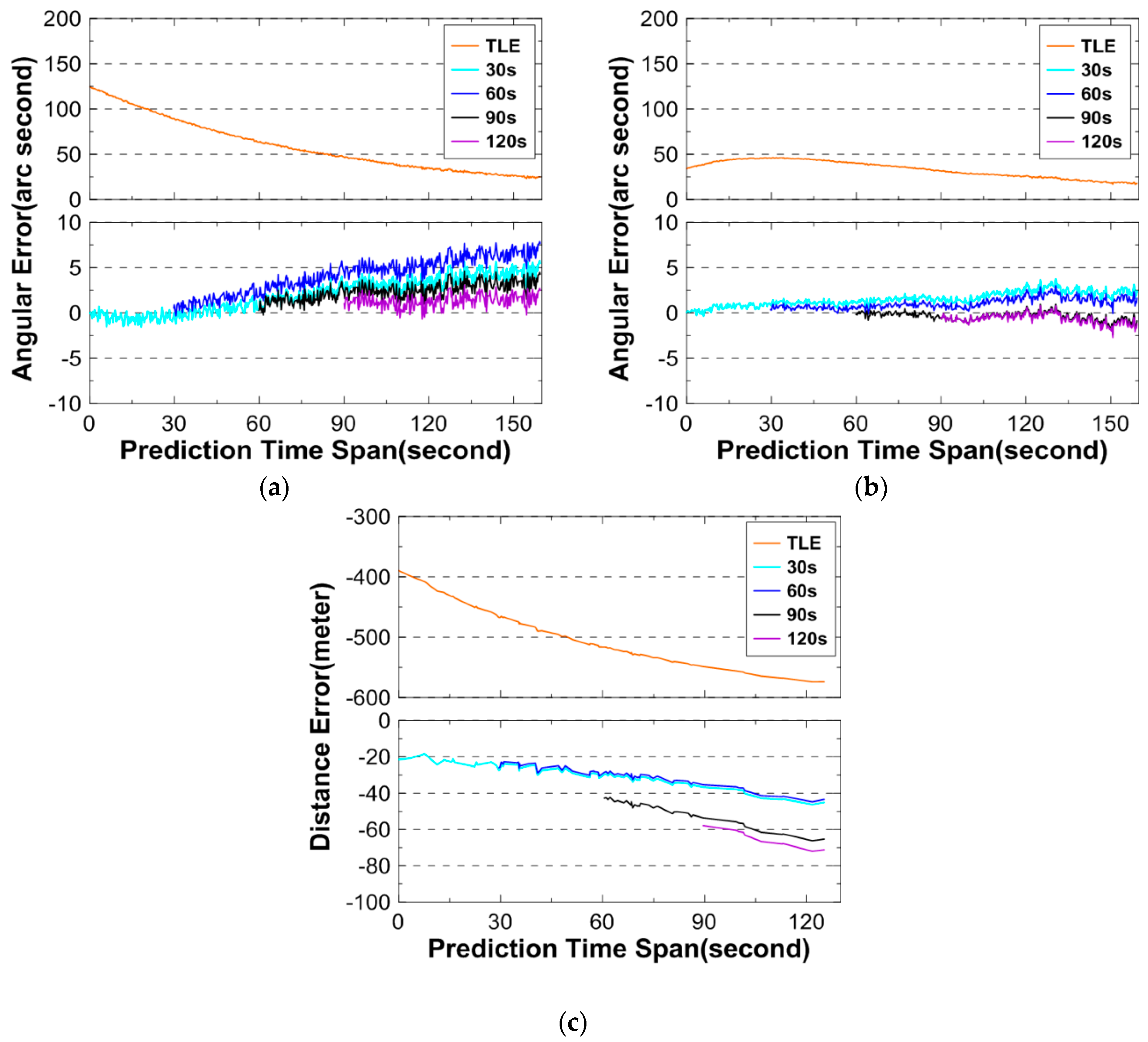
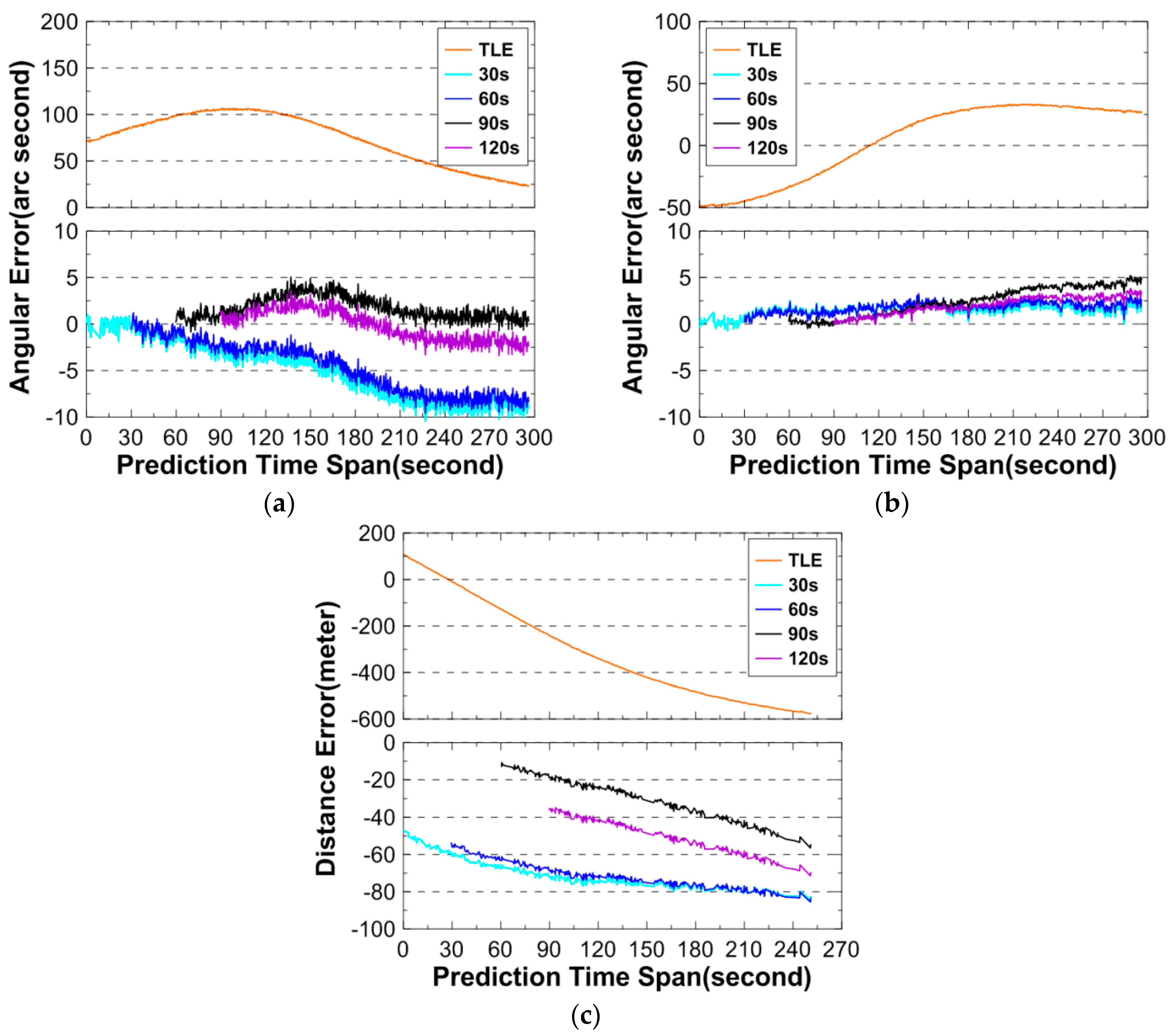
Generally, the pass duration of a LEO debris object is less than ten minutes with respect to the tracking station, which means the OP time spans are short. In such scenarios, considering full perturbations in the OD and OP computations will not substantially contribute to the OD and accuracy improvement. Take one pass of GRACE-A satellite (more sensitive to the gravity and drag), for example; the whole pass duration with respect to the tracking station is 293.0 s. For the application scenario discussed in this paper, using 30 s angular data with the observation accuracy of 2″, the prediction errors (azimuth/elevation/distance) are 2.6″/3.3″/9.0 m, respectively, when only using a JGM-3 gravity model truncated to 20/20, while the angular errors are 2.6″/3.1″/8.5 m when the drag is included. It can be seen that the gain in the OP accuracy from considering the drag is minimal. Similarly, considering a gravity model with a higher degree/order in the discussed OD/OP scenario will only generate slightly better OP results. For example, when the full JGM-3 model of degree/order 70/70 is used, the prediction errors are 2.5″/3.1″/9.0 m, respectively for the azimuth, elevation, and distance. Other perturbation forces, such as the third-body gravities and solar radiation pressure, can be neglected for the discussed problem. Thus, it is only necessary to consider a gravity model truncated to degree/order of 20/20. That is, almost the same OP results for the time period from the last observation epoch to the pass end are obtained whether a complete set of force models or only the truncated gravity model is considered in the OD computation.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}