
A High Precision Terahertz Wave Image Reconstruction Algorithm


Abstract
:1. Introduction
2. Methods
2.1. Monostatic Case
2.2. Multistatic Case
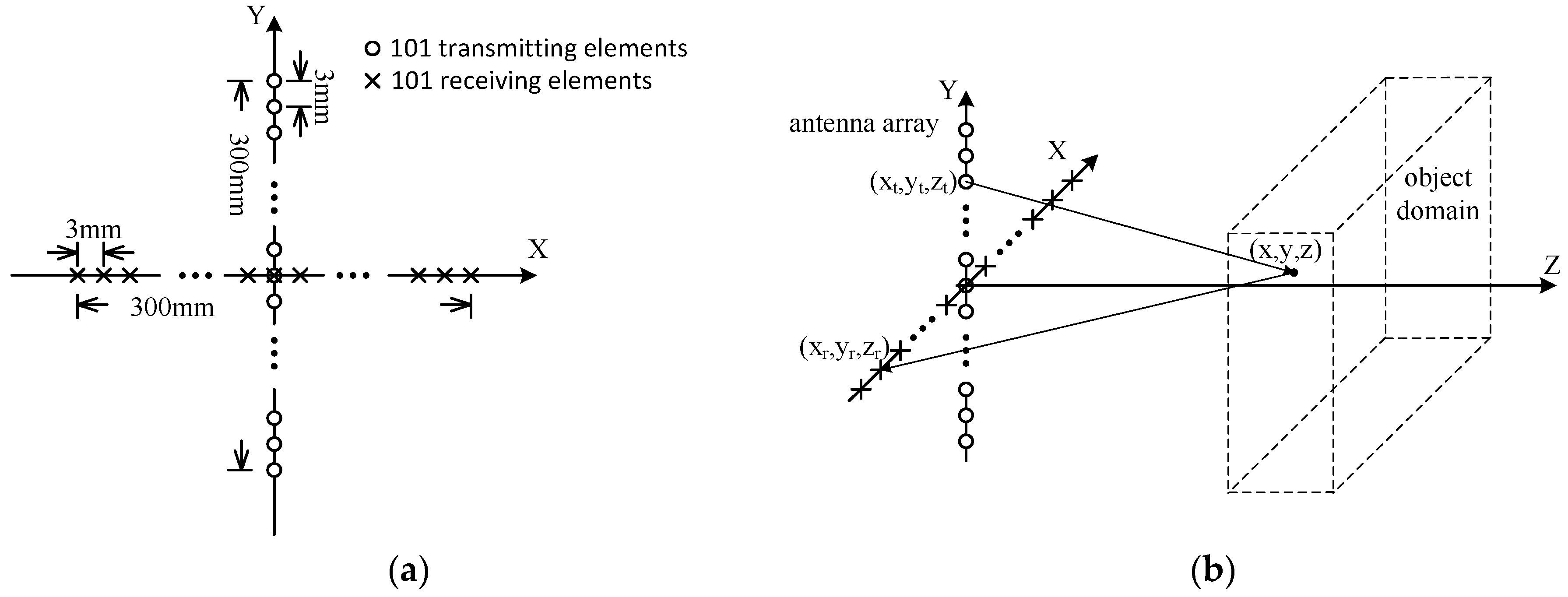
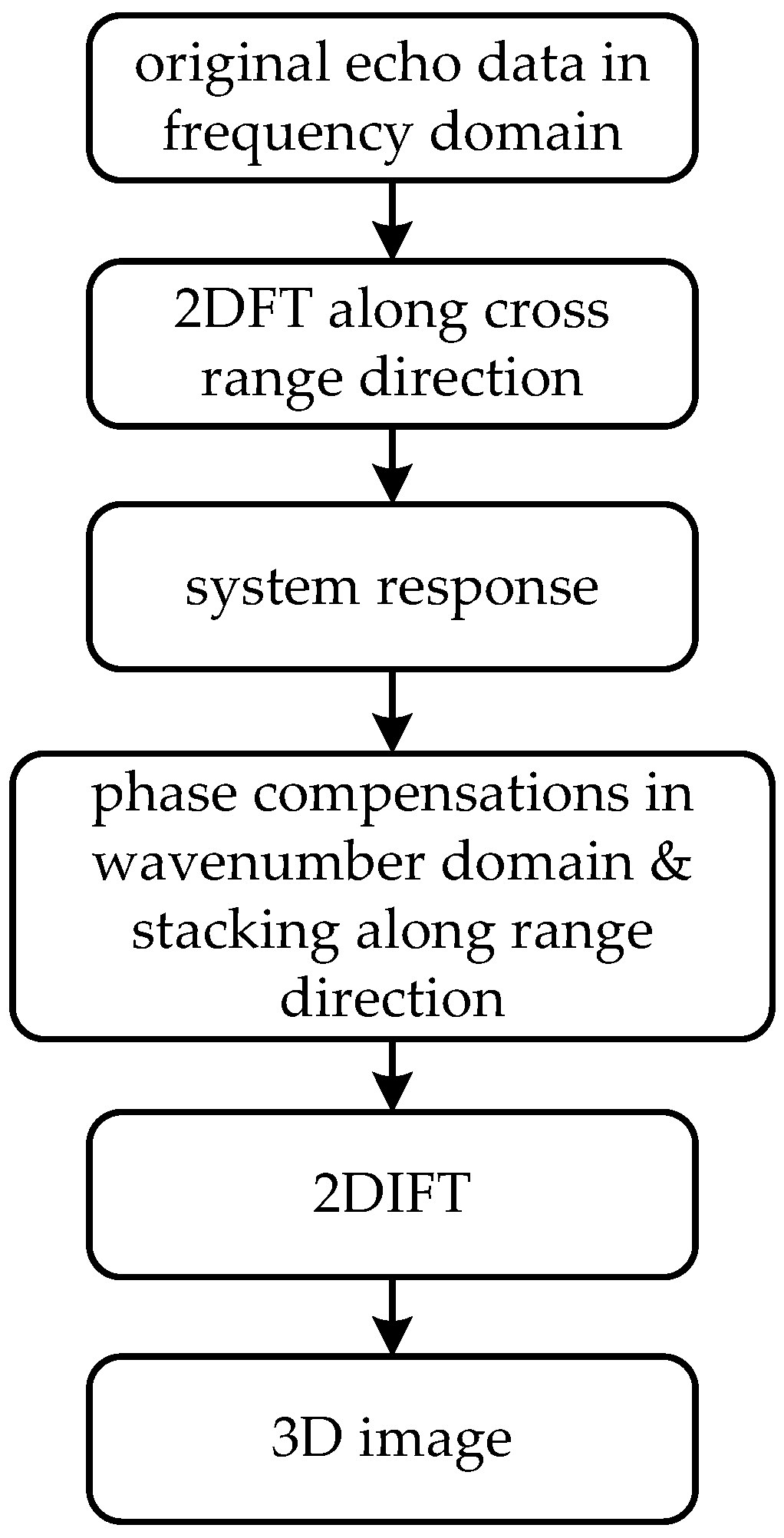
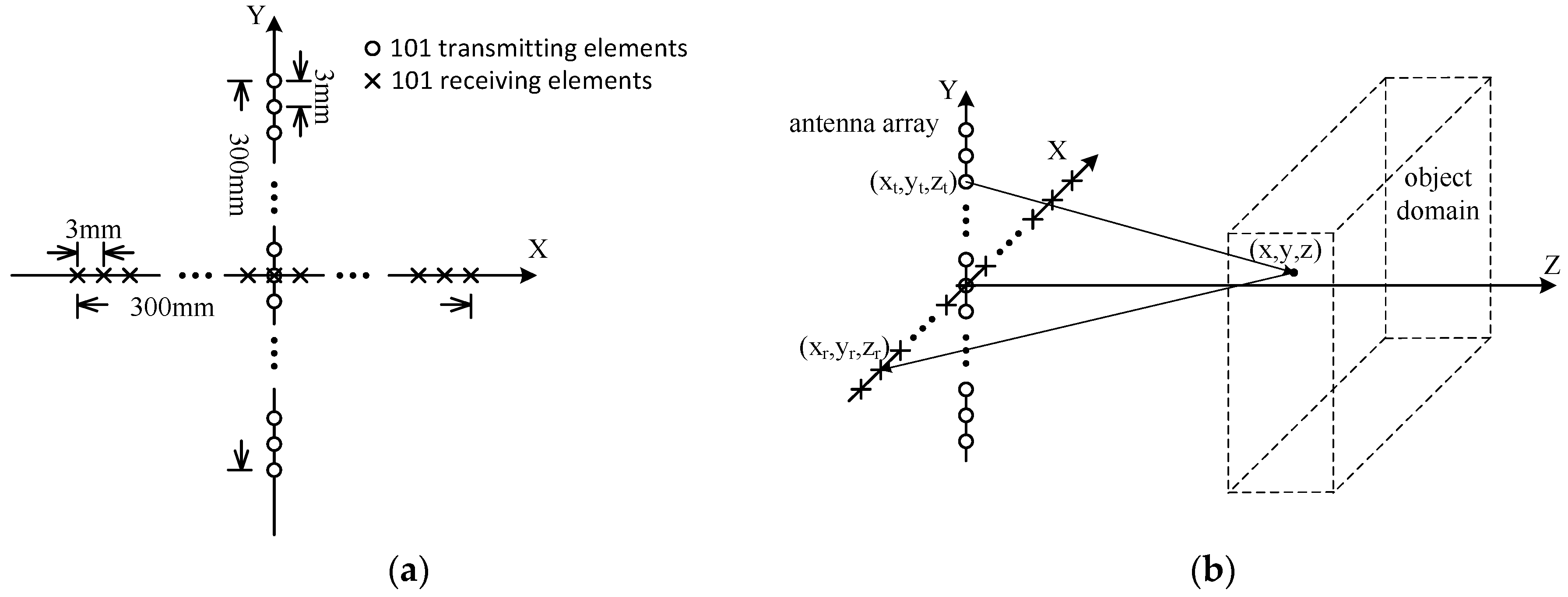
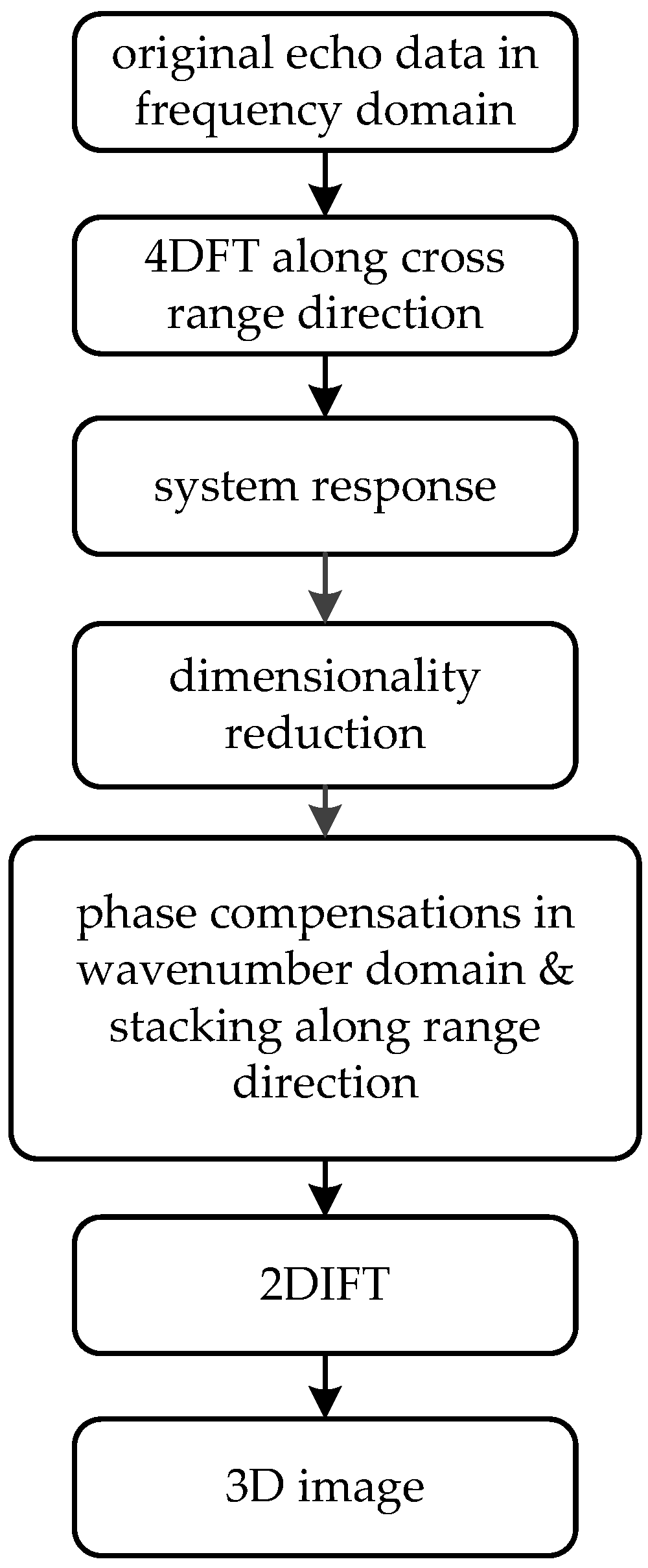
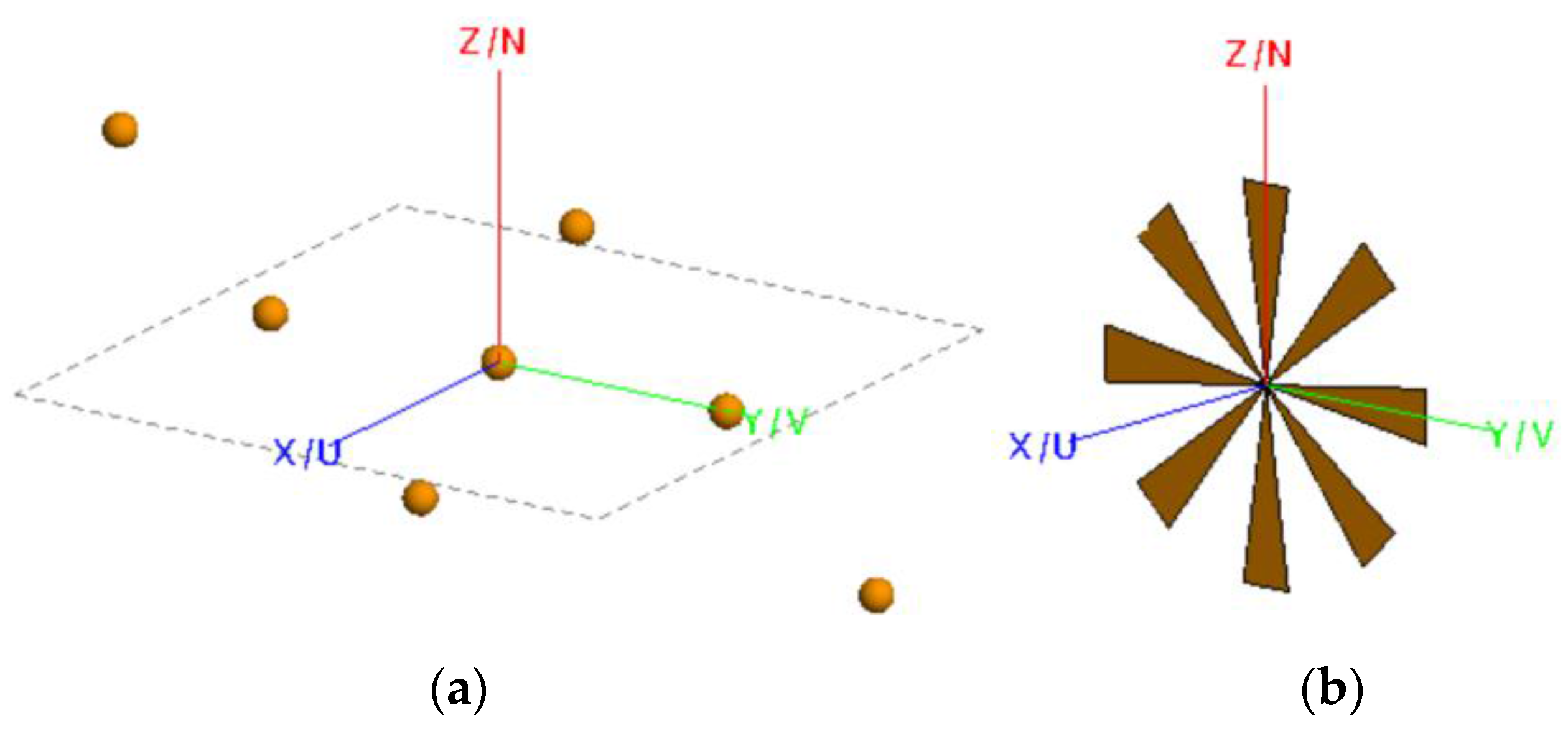
- Phase compensations will be taken according to Equation (21), and when the array is a planar one, which is the case in Figure 3b it is always assumed and for convenience;
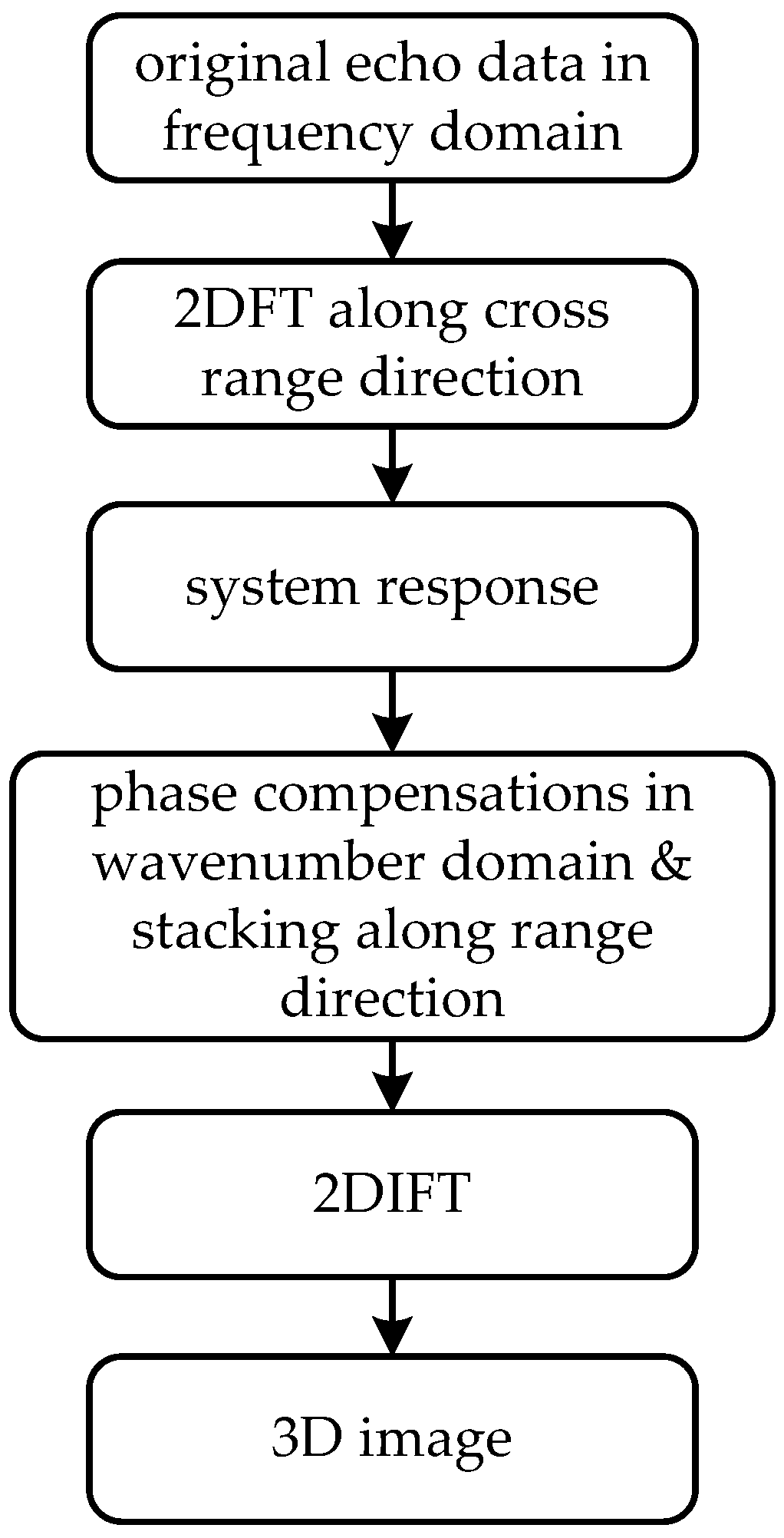
- Dimensionality reduction means will be transformed into , where a 5D data matrix is reduced to a 3D one. This is performed according to Equations (16) and (17).
2.3. Discussion on Sampling Criteria and Spatial Resolution
3. Simulation Results
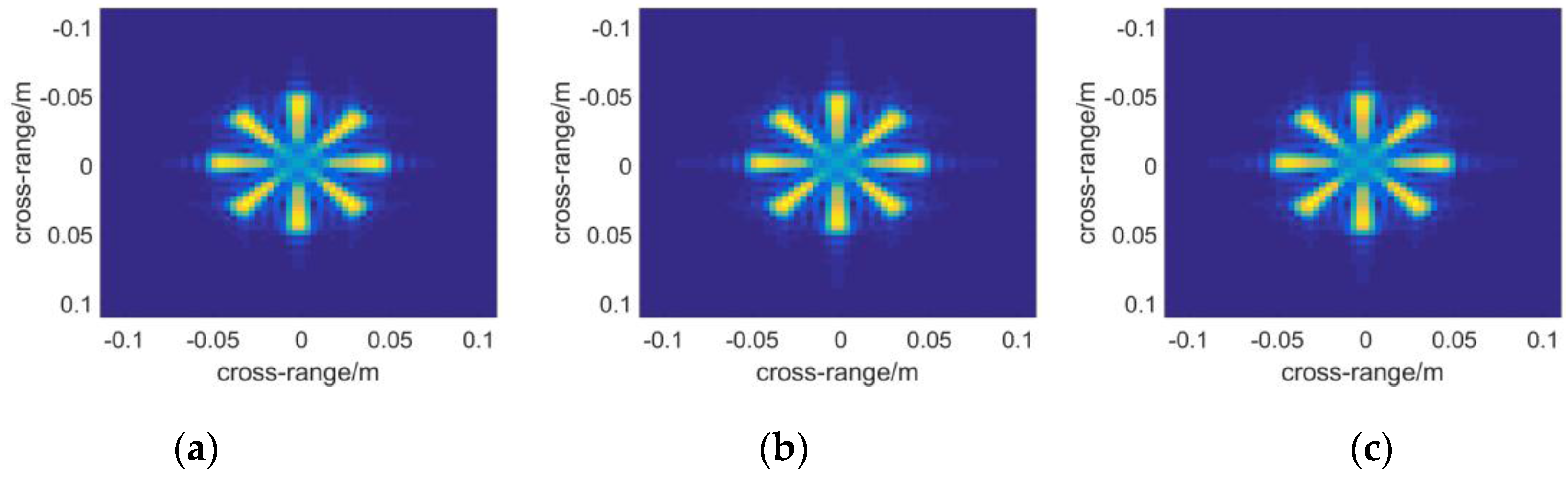
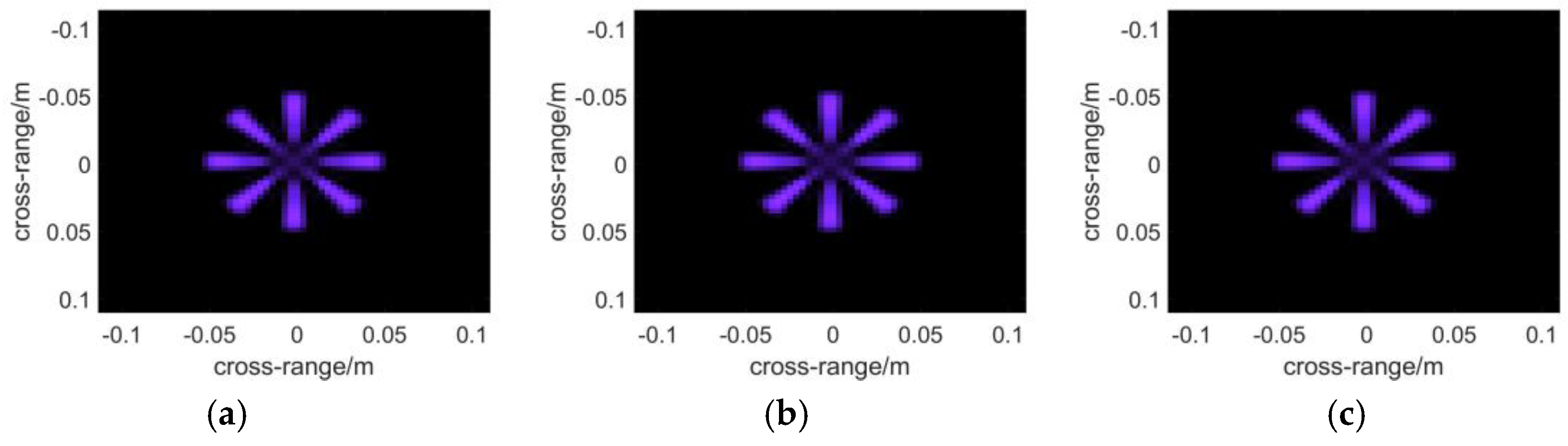
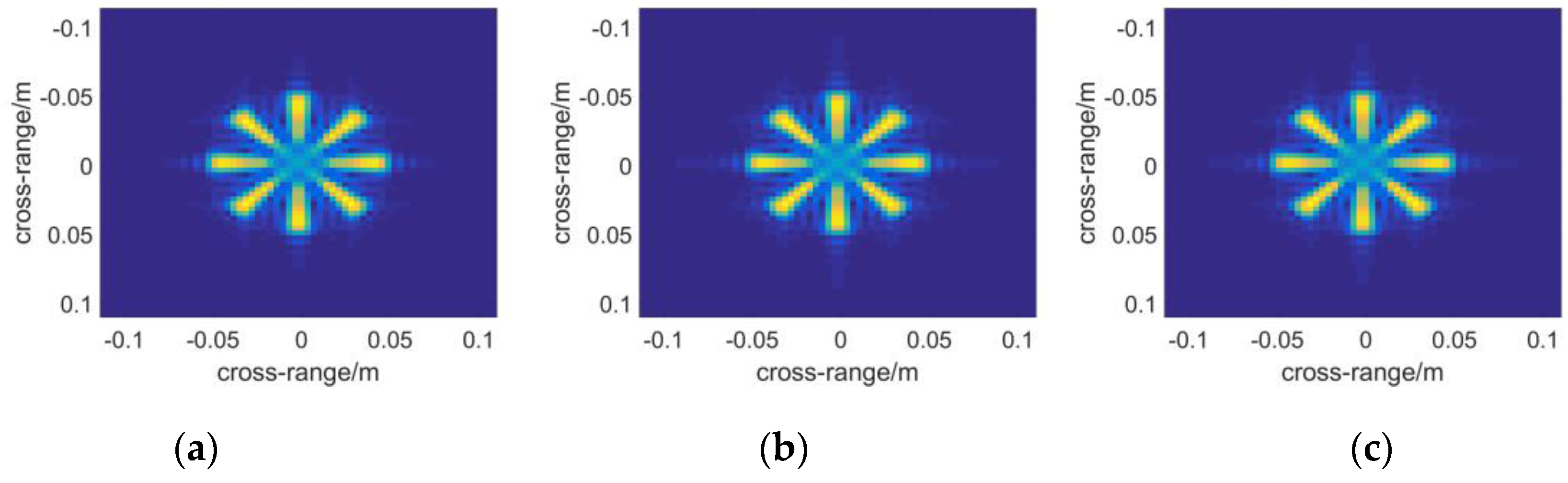
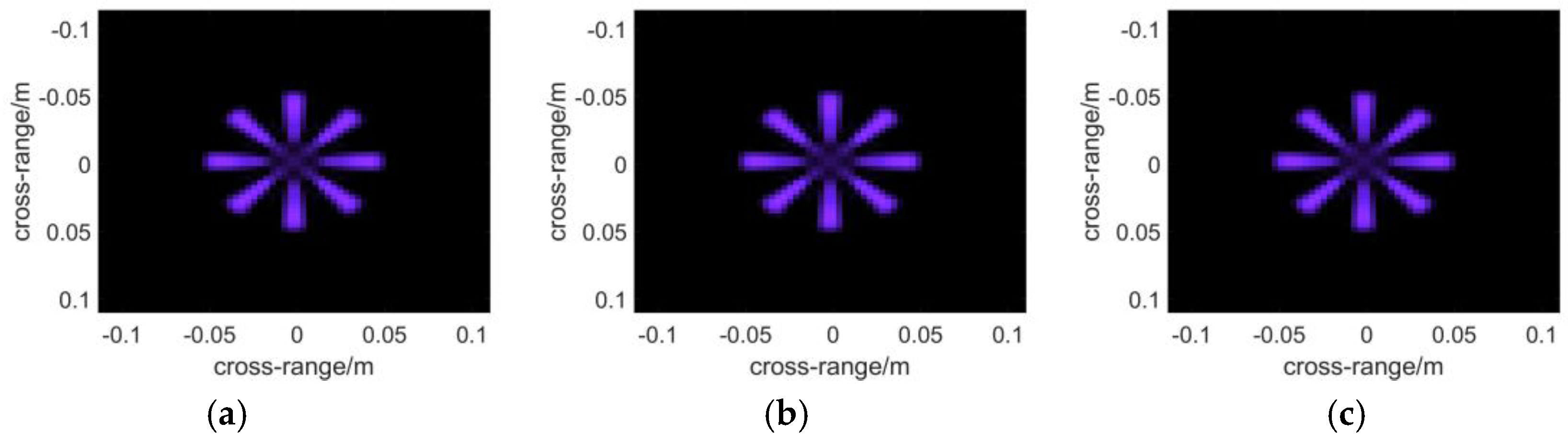
3.1. Monostatic Case
3.2. Multistatic Case
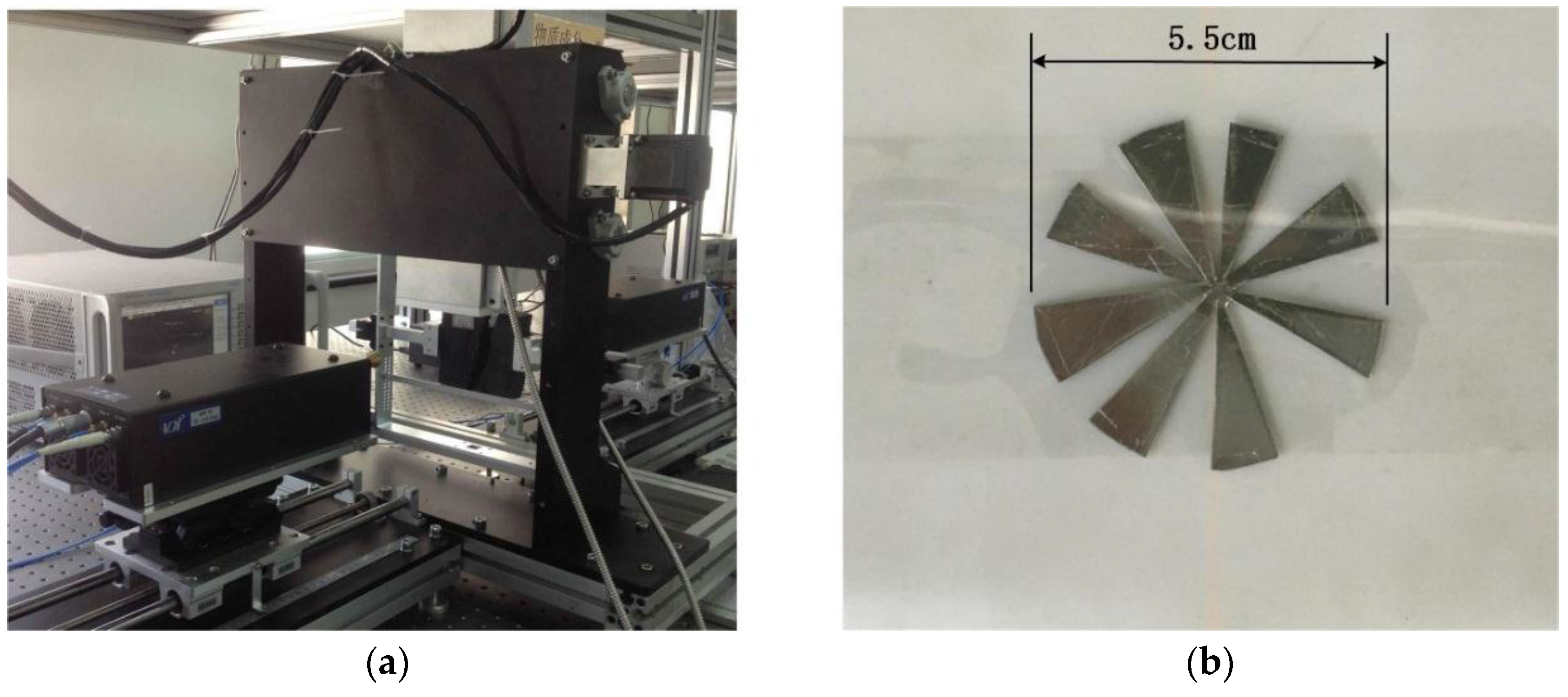
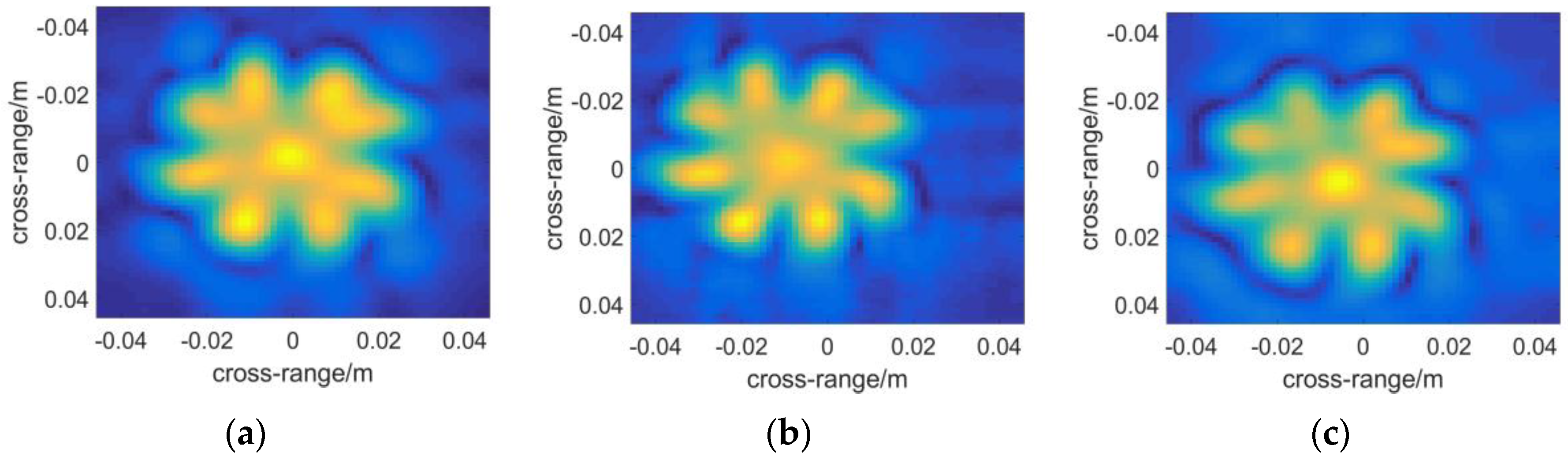
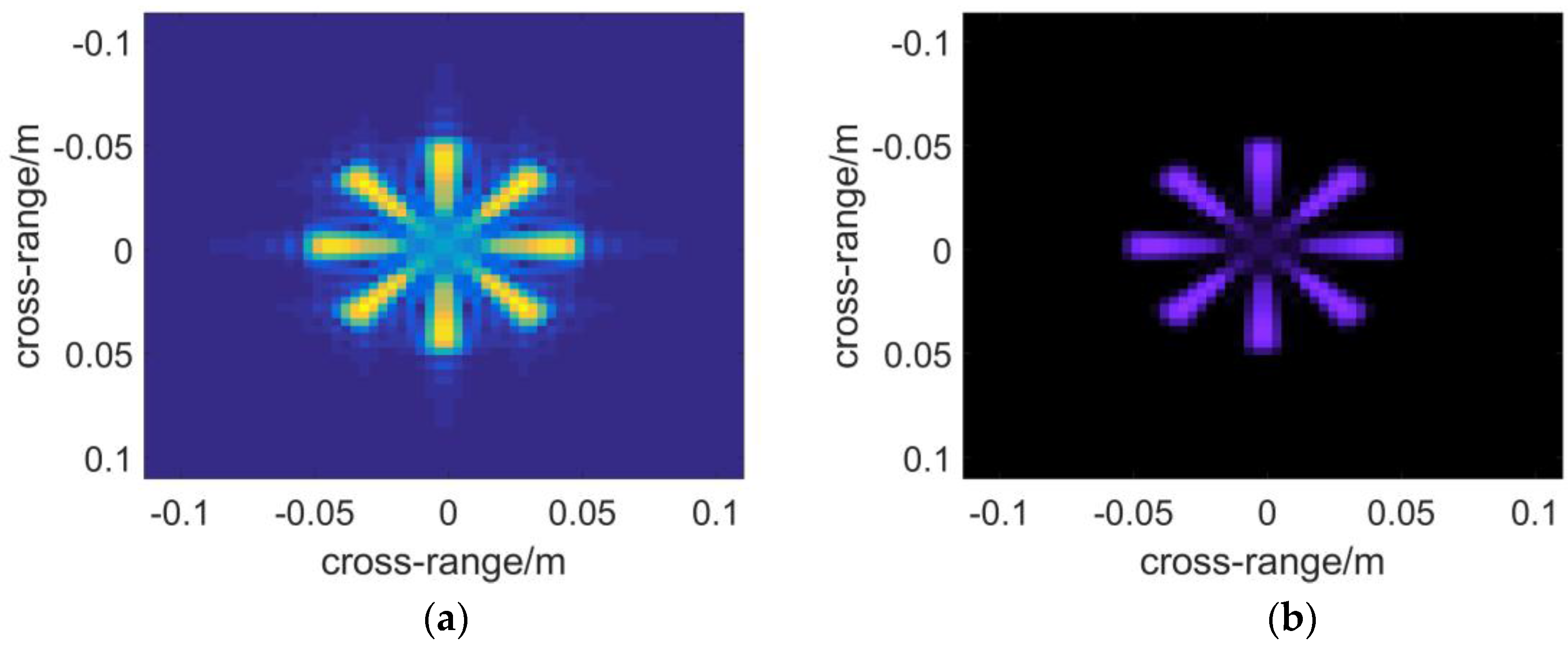
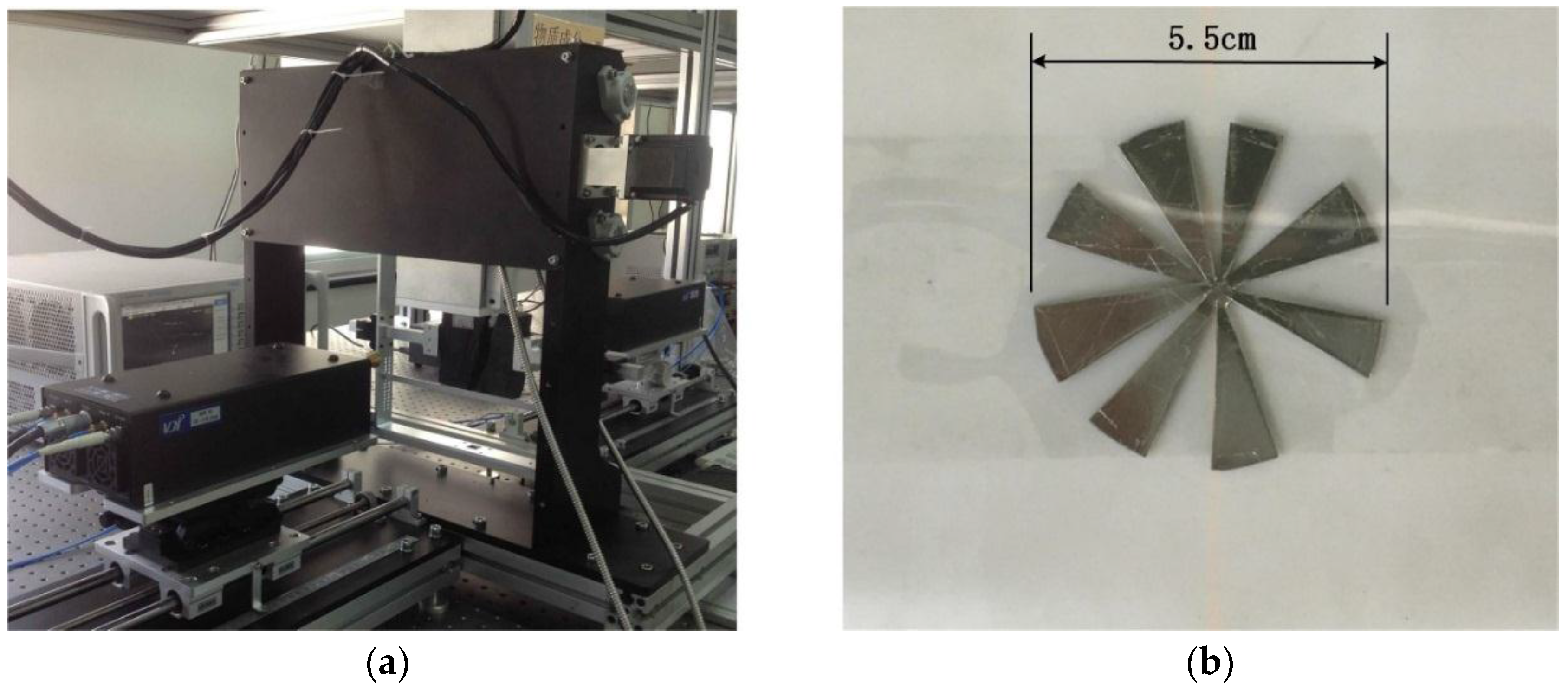
4. Experimental Results
5. Discussion
6. Conclusions
- High precision of positioning relative to RMA, proved in the simulations and experiments;
- Capability to operate without knowing the distance a priori. In RMA, the distance from the scanning array to the objective scene center must be known before image reconstruction, or the final images may deteriorate; however this is not the case in PMA, as long as the frequency sampling interval satisfies the requirement of the scope of the objective;
- Conserve the focusing and resolution performance of BPA in principle without any approximation;
- More computation intensive than RMA, though can be implemented in parallel;
- Must operate in equal-interval sampling case. This is a fatal restriction, especially in multistatic cases. But BPA will not suffer from the same.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Deng, Y.; Liu, X. Electromagnetic imaging methods for nondestructive evaluation applications. Sensors 2011, 11, 11774–11808. [Google Scholar] [CrossRef] [PubMed]
- Amenabar, I.; Lopez, F.; Mendikute, A. In introductory review to THZ non-destructive testing of composite mater. J. Infrared Millim. Terahertz Waves 2012, 34, 152–169. [Google Scholar] [CrossRef]
- Zhong, H.; Xu, J.Z.; Xie, X.; Yuan, T.; Reightler, R.; Madaras, E.; Zhang, X.C. Nondestructive defect identification with terahertz time-of-flight tomography. IEEE Sens. J. 2005, 5, 203–208. [Google Scholar] [CrossRef]
- Ahmed, S.S.; Schiessl, A.; Schmidt, L.P. A Novel Active Real-Time Digital-Beamforming Imager for Personnel Screening. In Proceedings of the 9th European Conference on Synthetic Aperture Radar (EUSAR), Nuremberg, Germany, 23–26 April 2012; pp. 178–181.
- Schiessl, A.; Ahmed, S.S.; Genghammer, A.; Schmidt, L. A technology demonstrator for a 0.5 m × 0.5 m fully electronic digital beamforming mm-wave imaging system. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; pp. 2606–2609.
- Sheen, D.M.; Mcmakin, D.L.; Hall, T.E. Three-dimensional millimeter-wave imaging for concealed weapon detection. IEEE Trans. Microw. Theory Tech. 2001, 49, 1581–1592. [Google Scholar] [CrossRef]
- Moll, J.; Boswirth, M.; Krozer, V.; Bosse, J. Real-Time Data Acquisition and Signal Processing of a Multistatic mm-Wave Radar System. In Proceedings of the 7th European Conference on Antennas and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013; pp. 2303–2307.
- Gumbmann, F.; Schmidt, L. Design of sparse mimo arrays for short range imaging applications. In Proceedings of the Microwave Conference Proceedings (APMC), Yokohama, Japan, 7–10 December 2010; pp. 1653–1656.
- Tran, H.P.; Gumbmann, F.; Weinzierl, J.; Schmidt, L. A fast scanning w-band system for advanced millimetre-wave short range imaging applications. In Proceedings of the Radar Conference, Manchester, UK, 13–15 September 2006; pp. 146–149.
- Krozer, V.; Loffler, T.; Dall, J.; Kusk, A. Terahertz imaging systems with aperture synthesis techniques. Microw. Theory Tech. IEEE Trans. 2010, 58, 2027–2039. [Google Scholar] [CrossRef]
- Amineh, R.K.; Khalatpour, A.; Xu, H.; Baskharoun, Y.; Nikolova, N.K. Three-dimensional near-field microwave holography for tissue imaging. Int. J. Biomed. Imaging 2012, 2012, 291494. [Google Scholar] [CrossRef] [PubMed]
- Ravan, M.; Amineh, R.K.; Nikolova, N.K. Two-dimensional near-field microwave holography. Inverse Probl. 2010, 26, 055011. [Google Scholar] [CrossRef]
- Sešek, A.; Švigelj, A.; Trontelj, J. A thz tomography imaging system. In Proceedings of the 40th International Conference on Infrared, Millimeter, and Terahertz waves (IRMMW-THz), Hong Kong, China, 23–28 August 2015; pp. 235–240.
- Shashidharan, S.; Johny, J. Nanotechnology based terahertz imaging for cancer diaganosis. In Proceedings of the International Conference on Electrical, Electronics, Signals, Communication and Optimization, Andhra Pradesh, India, 24–25 Januray 2015.
- Adam, A.J.L. Review of near-field terahertz measurement methods and their applications. J. Infrared Millim. Terahertz Waves 2011, 32, 976–1019. [Google Scholar] [CrossRef]
- Moon, K.; Lee, I.M.; Shin, J.H.; Lee, E.S.; Kim, N.; Lee, W.H.; Ko, H.; Han, S.P.; Park, K.H. Bias field tailored plasmonic nano-electrode for high-power terahertz photonic devices. Sci. Rep. 2015, 5. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, A.; Férachou, D.; Sharma, G.; Singh, K.; Kirouacturmel, M.; Ozaki, T. Ultra-high dynamic range electro-optic sampling for detecting millimeter and sub-millimeter radiation. Sci. Rep. 2016, 6, 23107. [Google Scholar] [CrossRef] [PubMed]
- Mitrofanov, O.; Khromova, I.; Siday, T.; Thompson, R.J.; Ponomarev, A.N.; Brener, I.; Reno, J.L. Near-field spectroscopy and imaging of subwavelength plasmonic terahertz resonators. IEEE Trans. Terahertz Sci. Technol. 2016, 6, 1–7. [Google Scholar] [CrossRef]
- Zhao, J.; Chu, W.; Guo, L.; Wang, Z.; Yang, J.; Liu, W.; Cheng, Y.; Xu, Z. Terahertz imaging with sub-wavelength resolution by femtosecond laser filament in air. Physics 2013, 4, 3880. [Google Scholar] [CrossRef] [PubMed]
- Shalaby, M.; Vicario, C.; Hauri, C.P. High-performing nonlinear visualization of terahertz radiation on a silicon charge-coupled device. Nat. Commun. 2015, 6, 8439. [Google Scholar] [CrossRef] [PubMed]
- Fatimy, A.E.; Myers-Ward, R.L.; Boyd, A.K.; Daniels, K.M.; Gaskill, D.K.; Barbara, P. Epitaxial graphene quantum dots for high-performance terahertz bolometers. Nat. Nanotechnol. 2016, 11, 335–338. [Google Scholar] [CrossRef] [PubMed]
- Guillet, J.P.; Recur, B.; Frederique, L.; Bousquet, B.; Canioni, L.; Manek-Hönninger, I.; Desbarats, P.; Mounaix, P. Review of terahertz tomography techniques. J. Infrared Millim. Terahertz Waves 2014, 35, 382–411. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. Mimo Radar Signal Processing; Wiley-IEEE Press: Hoboken, NJ, USA, 2009; pp. 235–270. [Google Scholar]
- Tan, K.; Wu, S.; Wang, Y.; Ye, S.; Chen, J.; Fang, G. A novel two-dimensional sparse mimo array topology for uwb short-range imaging. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 702–705. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, H.; Tian, X.; Zhou, F. Synthesis of extreme sparse array for real-time 3D acoustic imaging. Electron. Lett. 2015, 51, 803–804. [Google Scholar] [CrossRef]
- Chi, C.; Li, Z.; Li, Q. Fast broadband beamforming using nonuniform fast fourier transform for underwater real-time 3-d acoustical imaging. IEEE J. Ocean. Eng. 2015, 41, 1–13. [Google Scholar]
- Chen, K.; Chen, H.; Wang, L.; Wu, H. Modified real ga for the synthesis of sparse planar circular arrays. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 274–277. [Google Scholar] [CrossRef]
- Soumekh, M. Synthetic Aperture Radar Signal Processing; Wiley: New York, NY, USA, 1999. [Google Scholar]
- Zhang, S. Engineering Electromagnetic Theory; Science Press: Beijing, China, 2009. [Google Scholar]
- Chew, W.C. Waves and Fields in Inhomogeneous Media; Van Nostrand Reinhold: New York, NY, USA, 1990. [Google Scholar]
- Kirsch, A. An Introduction to the Mathematical Theory of Inverse Problems; Springer Science & Business Media: New York, NY, USA, 2011; Volume 120. [Google Scholar]
- Groetsch, C.W. The Theory of Tikhonov Regularization for Fredholm Equations of the First Kind; Pitman Advanced Publishing Program: Boston, MA, USA, 1984; Volume 105. [Google Scholar]
- Baraniuk, R.G. Compressive sensing [lecture notes]. IEEE Signal. Process. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal. Proc. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Ozdemir, C.; Demirci, S.; Yigit, E.; Yilmaz, B. Compressed sensing based near-field inverse synthetic aperture radar imaging. In Proceedings of the PIERS Proceedings, Stockholm, Sweden, 12–15 August 2013; pp. 876–880.
- Yang, Z.L.; Zheng, Y.R. Near-field 3-D synthetic aperture radar imaging via compressed sensing. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal, Kyoto, Japan, 25–30 March 2012; pp. 2513–2516.
- Gao, X.; Liu, Z.; Chen, H.; Li, X. Fourier-sparsity integrated method for complex target ISAR imagery. Sensors 2015, 15, 2723–2736. [Google Scholar] [CrossRef] [PubMed]
- Cui, G.L.; Kong, L.J.; Yang, J.Y. Back-projection algorithm to stepped-frequency through-the-wall radar imaging. J. Univ. Electron. Sci. Technol. China 2008, 6, 864–867. [Google Scholar]
- Duersch, M. Backprojection for Synthetic Aperture Radar. Ph.D. Thesis, Brigham Young University, Brigham, UK, 2013. [Google Scholar]
- Lopez-Sanchez, J.M.; Fortuny-Guasch, J. 3-D radar imaging using range migration techniques. IEEE Trans. Antennas Propag. 2000, 48, 728–737. [Google Scholar] [CrossRef]
- Loewenthal, D.; Lu, L.; Roberson, R.; Sherwood, J. The wave equation applied to migration*. Geophys. Prospect. 1976, 24, 380–399. [Google Scholar] [CrossRef]
- Olofsson, T.; Stepinski, T. Phase shift migration for imaging layered materials and objects immersed in water. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 2522–2530. [Google Scholar] [CrossRef] [PubMed]
- Gu, S.; Li, C.; Gao, X.; Sun, Z.; Fang, G. Three-dimensional image reconstruction of targets under the illumination of terahertz gaussian beam-theory and experiment. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2241–2249. [Google Scholar] [CrossRef]
- Sun, Z.; Li, C.; Gu, S.; Fang, G. Fast three-dimensional image reconstruction of targets under the illumination of terahertz gaussian beams with enhanced phase-shift migration to improve computation efficiency. IEEE Trans. Terahertz Sci. Technol. 2014, 4, 479–489. [Google Scholar] [CrossRef]
- Goldsmith, P.F. Quasioptical Systems: Gaussian Beam Quasioptical Propagation and Applications; IEEE Press: Piscataway, NJ, USA, 1998. [Google Scholar]
- Ahmed, S.S.; Schiessl, A.; Schmidt, L. Multistatic mm-wave imaging with planar 2D-arrays. In Proceedings of the Microwave Conference, Munich, Germany, 16–18 March 2009; pp. 1–4.
- Fortuny, J. Efficient Algorithms for Three-Dimensional Near-Field Synthetic Aperture Radar Imaging. Ph.D. Thesis, University of Karslruhe, Karslruhe, Germany, 2001. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Operation frequency range | 75 GHz–110 GHz |
| Number of frequency samplings | 101 |
| Distance from antenna to y-z plane | 1 m |
| Scanning aperture size in the y/z direction1 | 0.441 m |
| Lateral sampling interval | 0.0035 m |
| Algorithm | Time Consumed (s) |
|---|---|
| BPA | 4430.7 |
| RMA | 2.4 |
| PMA | 7.3 |
| Parameters | Value |
|---|---|
| Operation frequency range | 75 GHz~110 GHz |
| Number of frequency samplings | 201 |
| Antenna 3 dB bandwidth | 10.8° |
| Distance from target to scanning array | 0.36 m |
| Space samplings interval | 0.0015 m |
| Number of samplings across range1 | 61 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Chang, T.; Geng, G.; Jia, C.; Cui, H.-L. A High Precision Terahertz Wave Image Reconstruction Algorithm. Sensors 2016, 16, 1139. https://doi.org/10.3390/s16071139
Guo Q, Chang T, Geng G, Jia C, Cui H-L. A High Precision Terahertz Wave Image Reconstruction Algorithm. Sensors. 2016; 16(7):1139. https://doi.org/10.3390/s16071139
Chicago/Turabian StyleGuo, Qijia, Tianying Chang, Guoshuai Geng, Chengyan Jia, and Hong-Liang Cui. 2016. "A High Precision Terahertz Wave Image Reconstruction Algorithm" Sensors 16, no. 7: 1139. https://doi.org/10.3390/s16071139
APA StyleGuo, Q., Chang, T., Geng, G., Jia, C., & Cui, H.-L. (2016). A High Precision Terahertz Wave Image Reconstruction Algorithm. Sensors, 16(7), 1139. https://doi.org/10.3390/s16071139