
Sensor Localization from Distance and Orientation Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. Problem Formalization
4. Isolating the Solution Set via Projections and Back-Projections
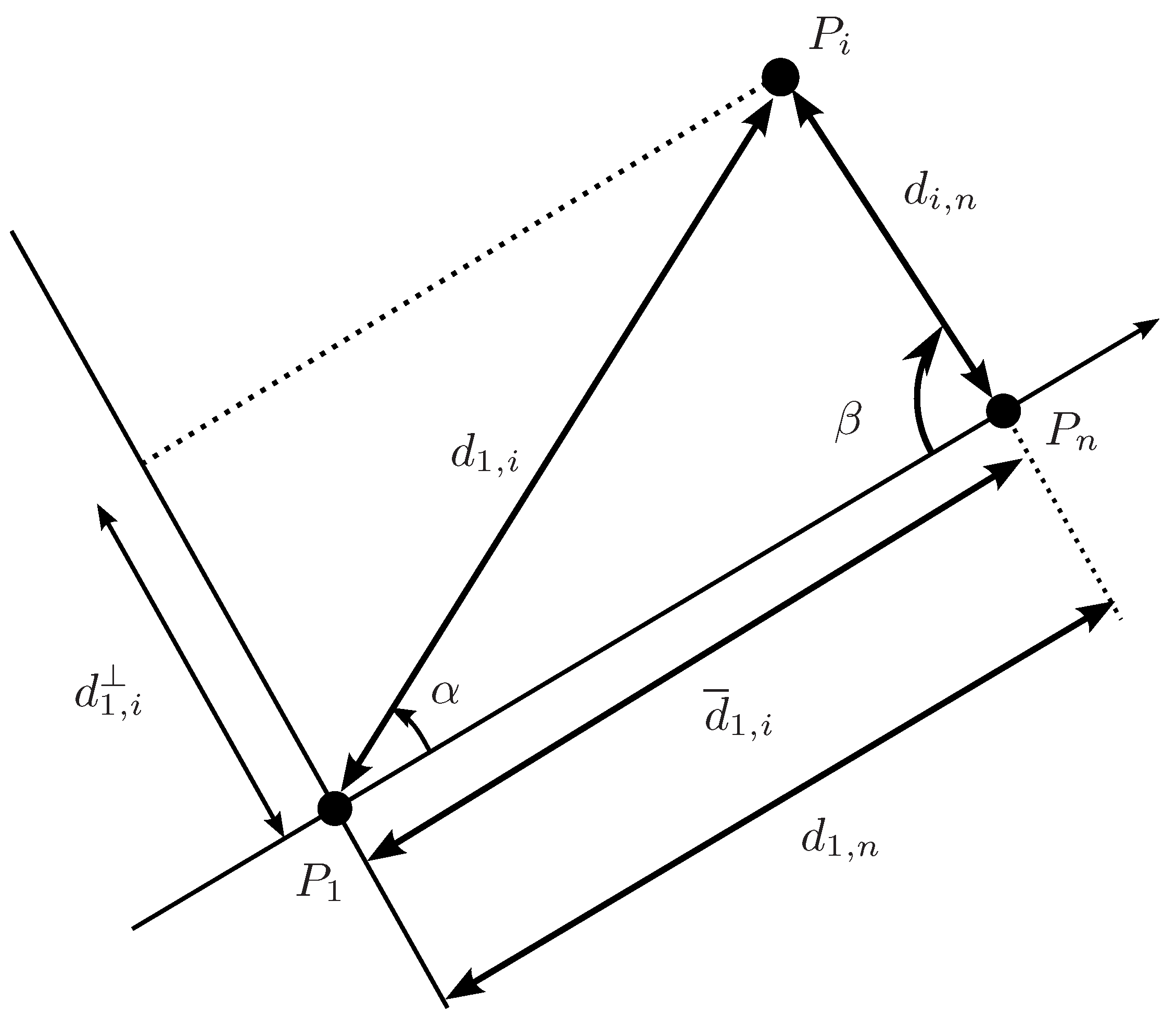
4.1. Projection
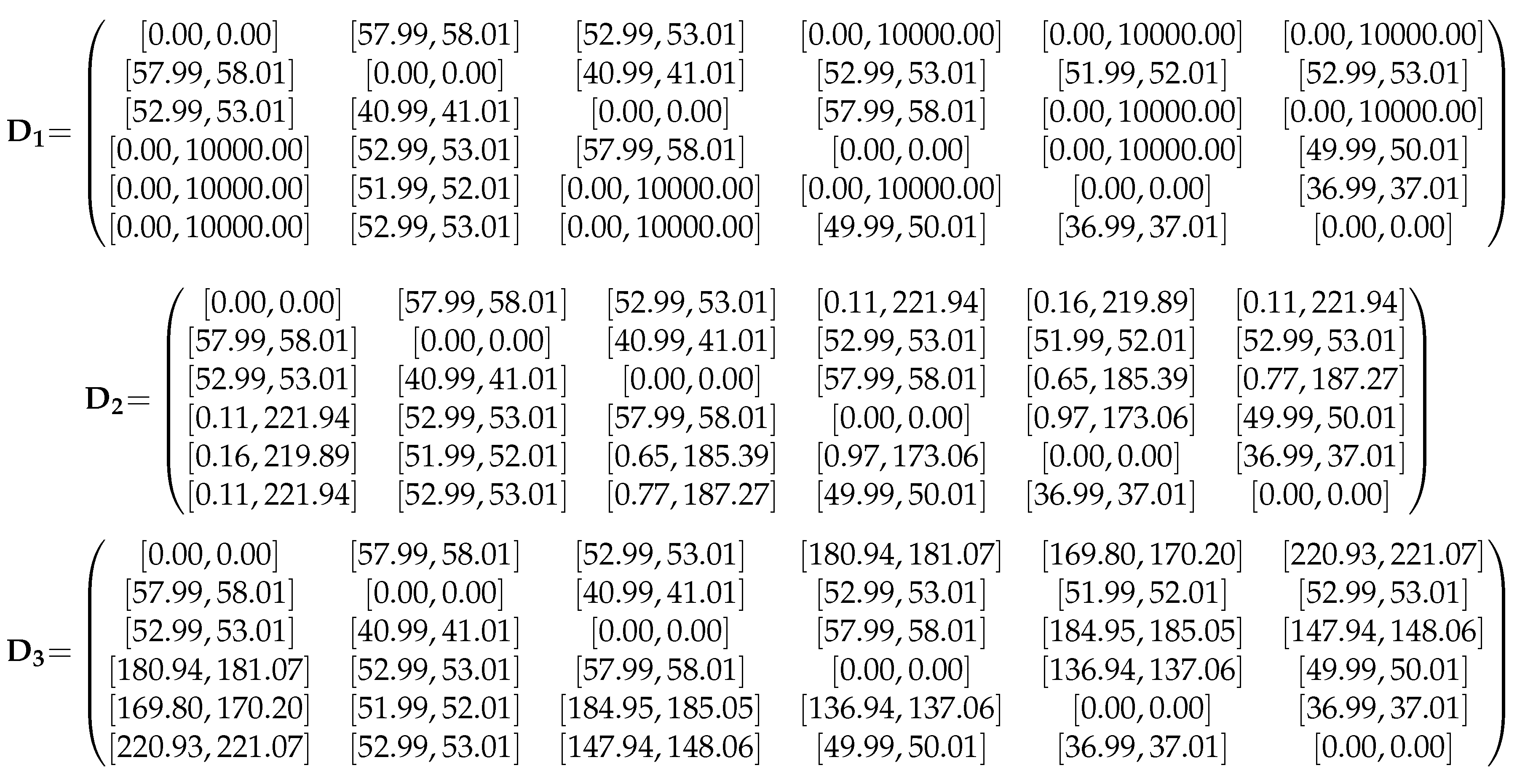
4.2. Range Reduction
| Algorithm 1: Range reduction using distance and orientation constraints. |
| ReduceRange(D) input: The matrix of squared distances output: The reduced matrix of squared distances.  |
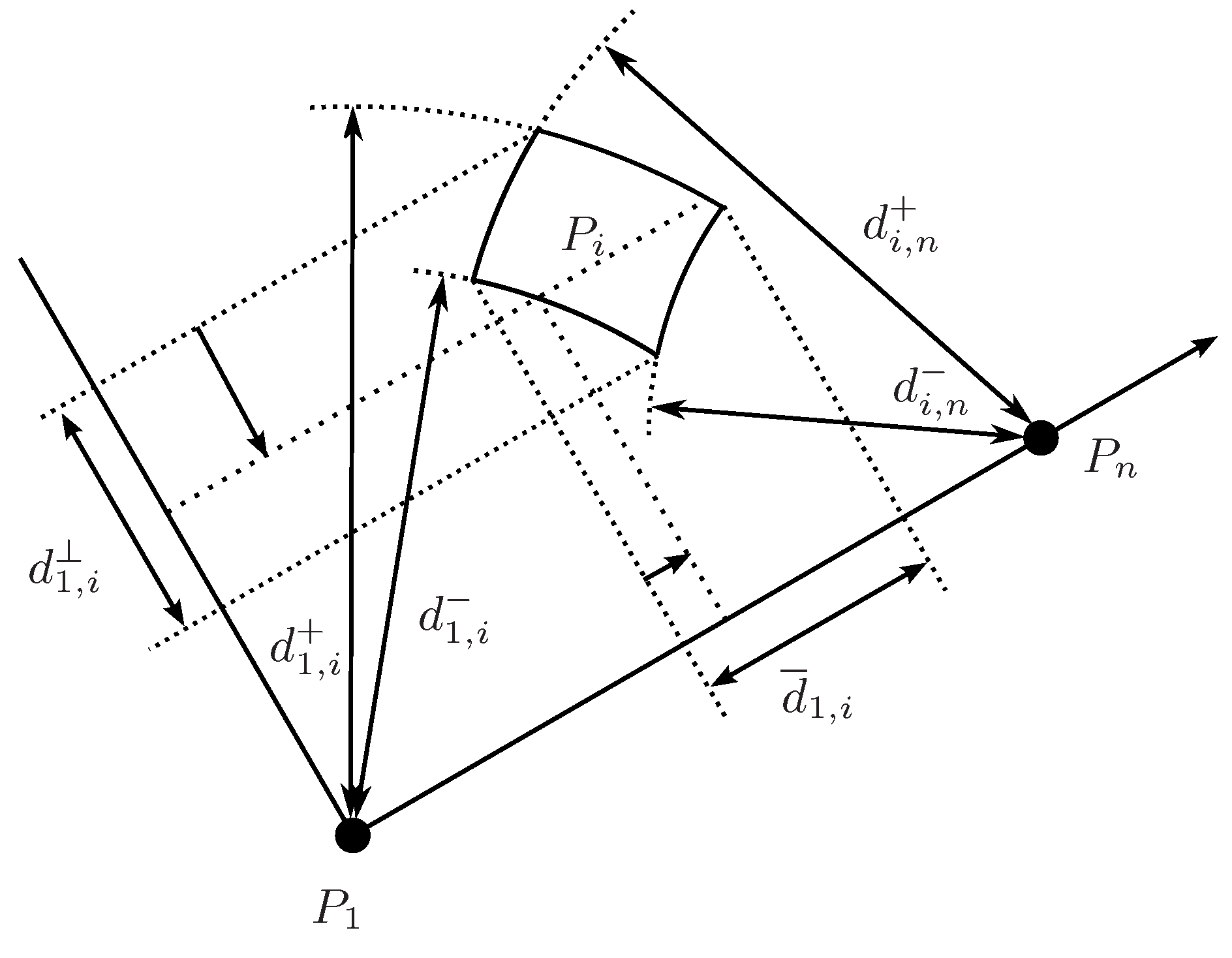
4.3. Back-Projection
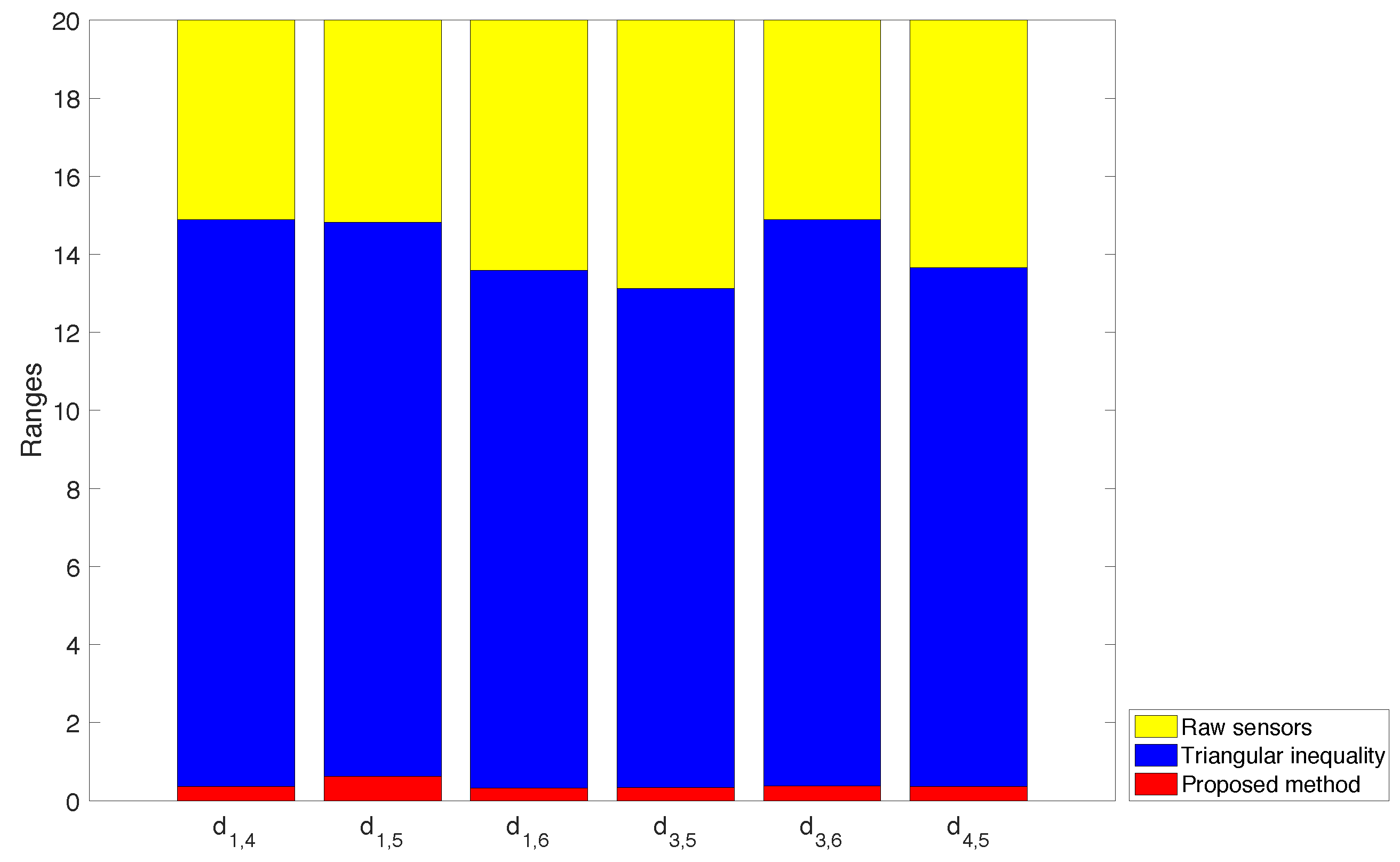
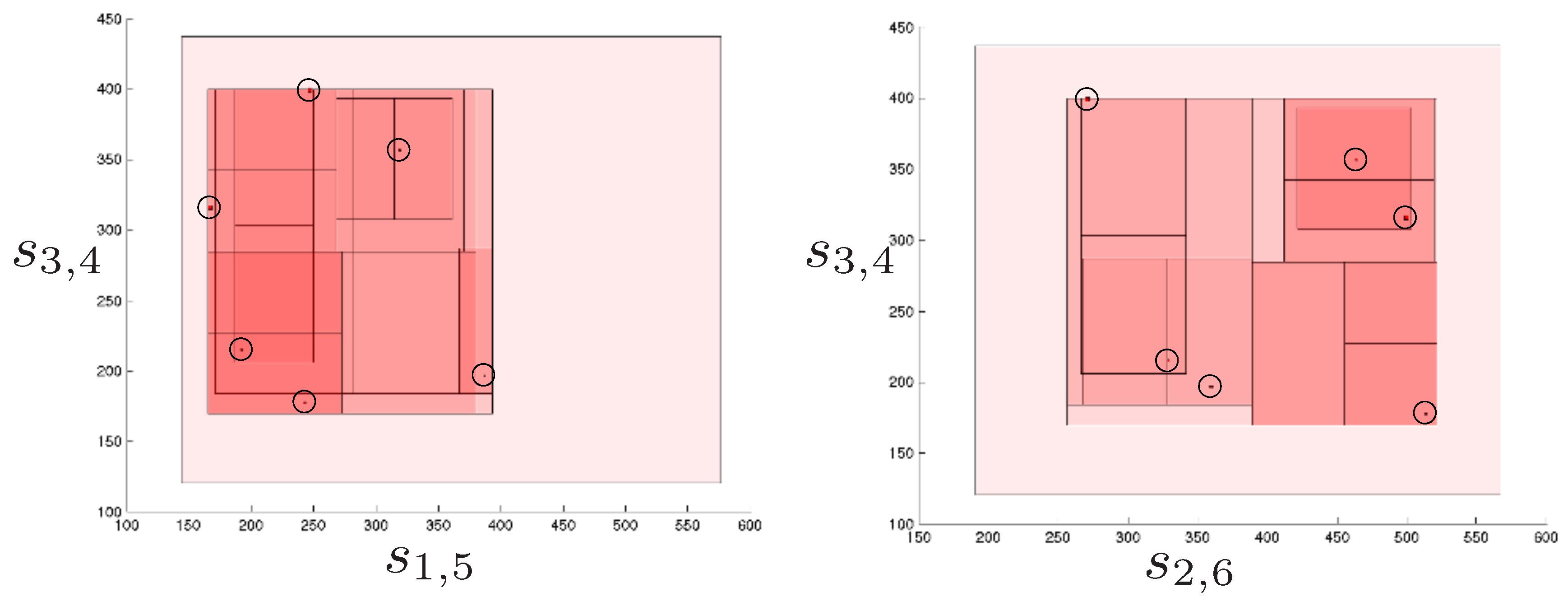
5. Experiments
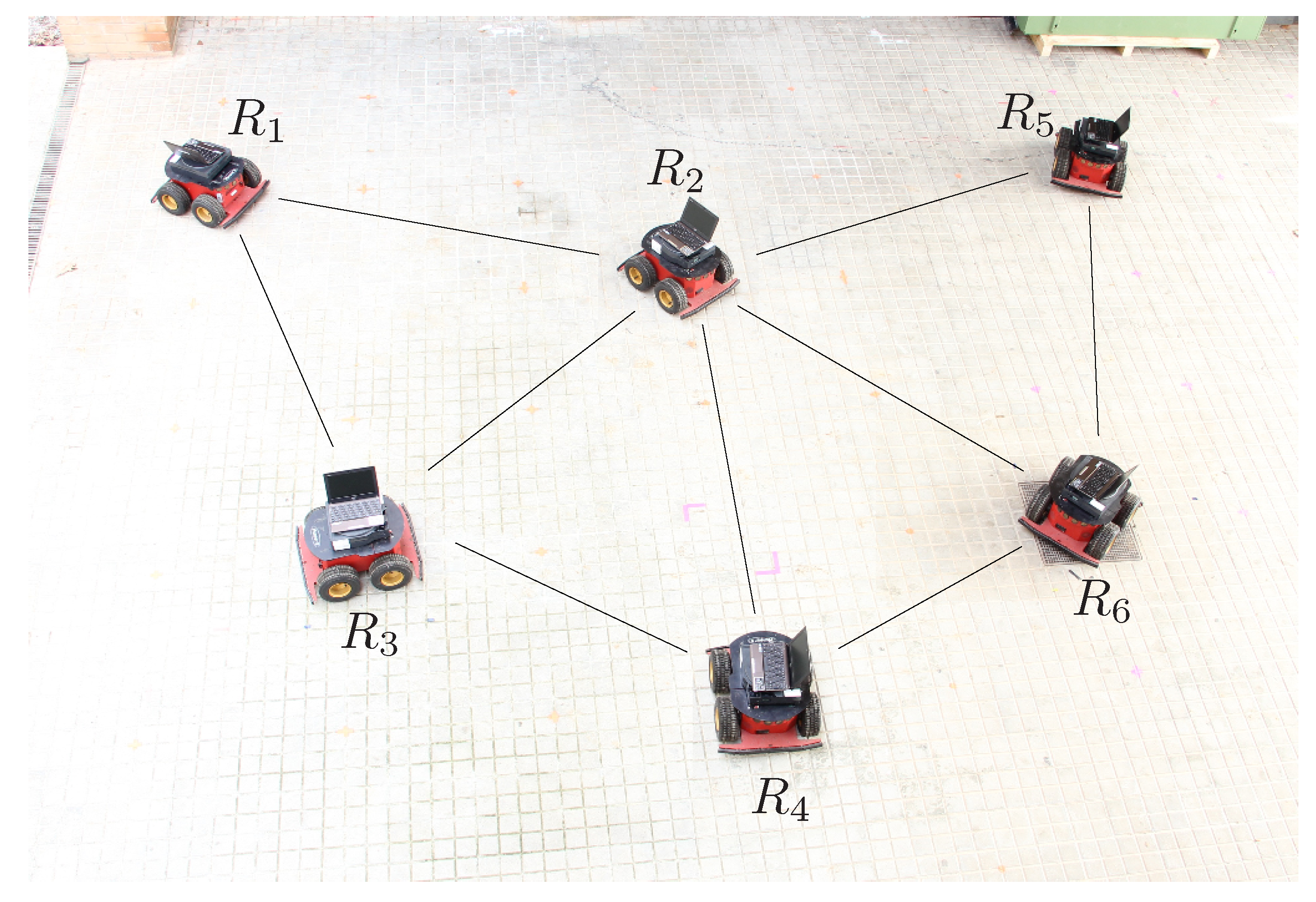
5.1. Localization of Networked Mobile Robots
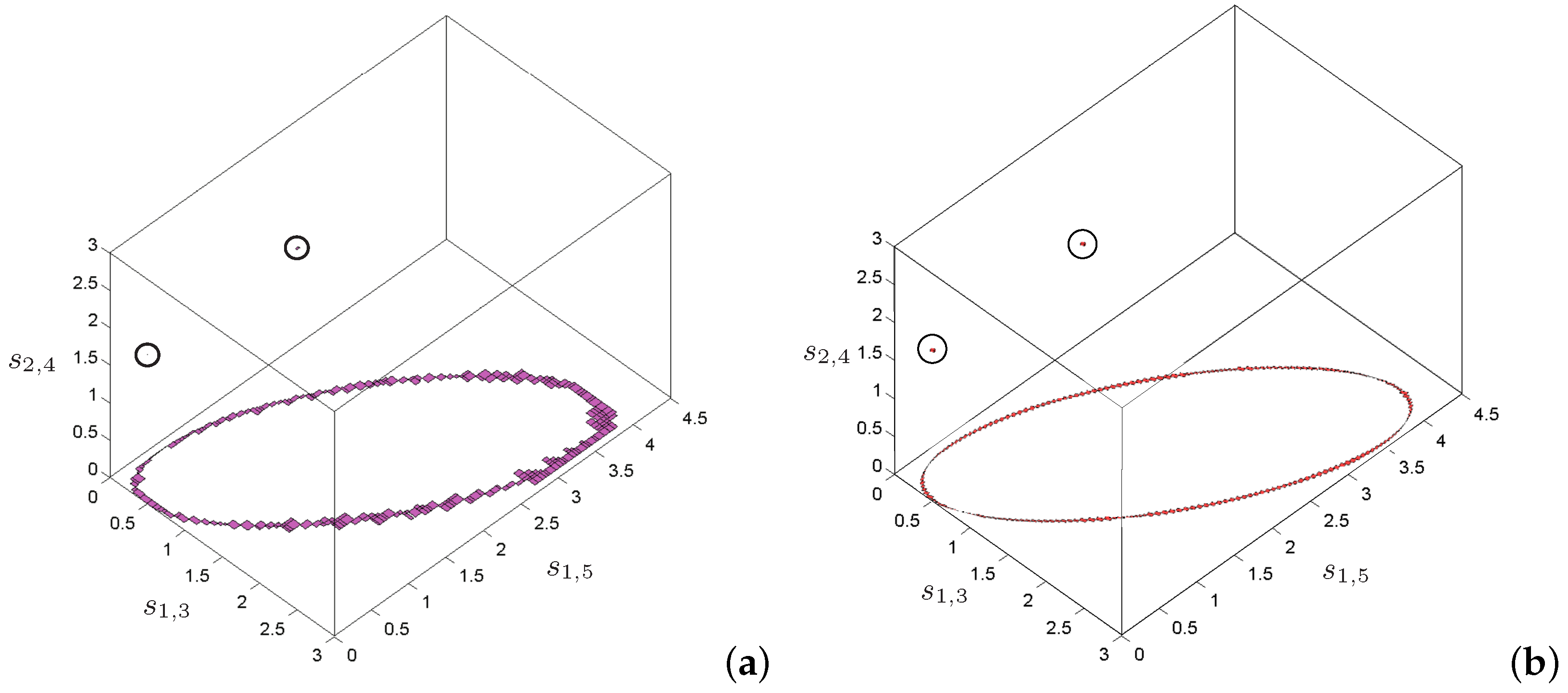
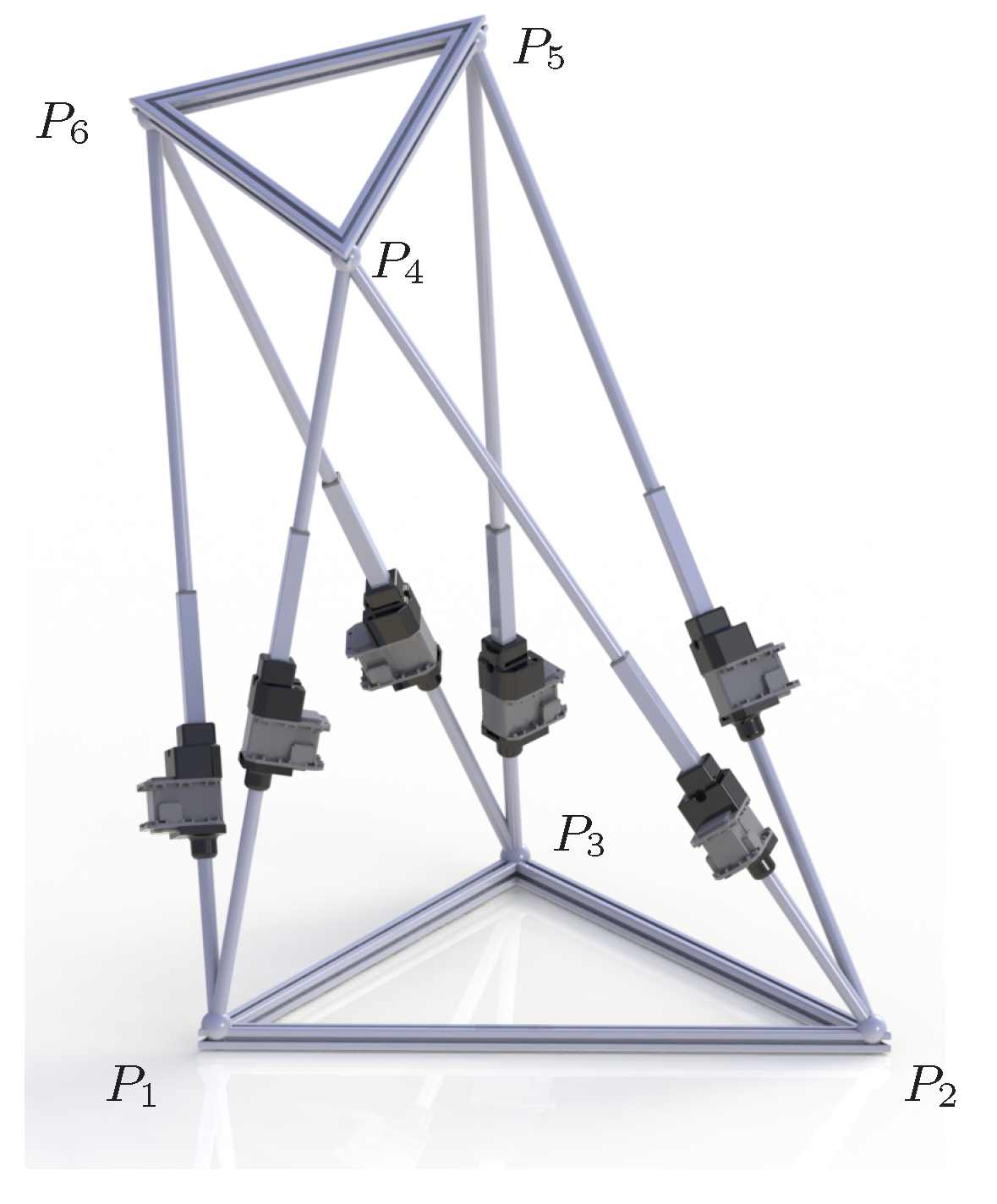
5.2. Position Analysis of a Parallel Robot
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Puccinelli, D.; Haenggi, M. Wireless sensor networks: Applications and challenges of ubiquitous sensing. IEEE Circuits Syst. Mag. 2005, 5, 19–31. [Google Scholar] [CrossRef]
- Wang, J.; Kim, J.U.; Shu, L.; Niu, Y.; Lee, S. A distance-based energy aware routing algorithm for wireless sensor networks. Sensors 2010, 10, 9493–9511. [Google Scholar] [CrossRef] [PubMed]
- Duran, O.; Althoefer, K.; Seneviratne, L.D. State of the art in sensor technologies for sewer inspection. IEEE Sens. J. 2002, 2, 73–81. [Google Scholar] [CrossRef]
- Angrisani, L.; Bechou, L.; Dallet, D.; Daponte, P.; Ousten, Y. Detection and location of defects in electronic devices by means of scanning ultrasonic microscopy and the wavelet transform. Measurement 2002, 31, 77–91. [Google Scholar] [CrossRef]
- Havel, R.F. Distance geometry: Theory, algorithms, and chemical applications. In Encyclopedia of Computational Chemistry; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 1998; pp. 723–741. [Google Scholar]
- Rojas, N.; Thomas, F. The univariate closure conditions of all fully-parallel planar robots derived from a single polynomial. IEEE Trans. Robot. 2013, 29, 758–765. [Google Scholar] [CrossRef]
- Crippen, G.; Havel, T.F. Distance Geometry and Molecular Conformation; Research Studies Press: Baldock, UK, 1998. [Google Scholar]
- Billinge, S.J.L.; Levin, I. The problem with determining atomic structure at the nanoscale. Science 2007, 316, 561–565. [Google Scholar] [CrossRef] [PubMed]
- Rojas, N.; Thomas, F. The forward kinematics of 3-RPR planar robots: A review and a distance-based formulation. IEEE Trans. Robot. 2011, 27, 143–150. [Google Scholar] [CrossRef]
- Thomas, F. A distance geometry approach to the singularity analysis of 3R robots. ASME J. Mech. Robot. 2015, 8, 011001. [Google Scholar] [CrossRef]
- Thomas, F.; Ros, L. Revisiting trilateration for robot localization. IEEE Trans. Robot. 2005, 21, 93–101. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.; Aranda, J. Sensor networks for optimal target localization with bearings-only measurements in constrained three-dimensional scenarios. Sensors 2013, 13, 10386–10417. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.C.; Chiu, Y.H.; Wen, C.Y. Using hybrid angle/distance information for distributed topology control in vehicular sensor networks. Sensors 2014, 14, 20188–20216. [Google Scholar] [CrossRef] [PubMed]
- Dress, A.W.M.; Havel, T. Bound smoothing under chirality constraints. SIAM J. Discret. Math. 1991, 4, 535–549. [Google Scholar] [CrossRef]
- Rull, A.; Porta, J.M.; Thomas, F. Distance bound smoothing under orientation constraints. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 1431–1436.
- Blumenthal, L.M. Theory and Applications of Distance Geometry; Oxford University Press: Oxford, UK, 1953. [Google Scholar]
- Havel, T. Distance geometry. In Encyclopedia of Nuclear Magnetic Resonance; Wiley: New York, NY, USA, 1995; pp. 1701–1710. [Google Scholar]
- Cao, M.; Anderson, B.D.O.; Morse, A.S. Localization with imprecise distance information in sensor networks. In Proceedings of the Joint IEEE Conference on Decision and Control and European Control Conference, Seville, Spain, 12–15 December 2005; pp. 2829–2834.
- Porta, J.M.; Ros, L.; Thomas, F.; Torras, C. A branch-and-prune algorithm for solving systems of distance constraints. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 342–348.
- Porta, J.M.; Ros, L.; Thomas, F. Inverse kinematics by distance matrix completion. In Proceedings of the 4th International Workshop on Computational Kinematics, Cassino, Italy, 4–6 May 2005.
- Thomas, F. Solving geometric constraints by iterative projections and backprojections. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1789–1795.
- Carter, G. Time delay estimation for passive sonar signal processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 463–470. [Google Scholar] [CrossRef]
- Gardner, W.A.; Chen, C.K. Signal-selective time-difference- of-arrival estimation for passive location of man-made signal sources in highly corruptive environments. I. Theory and method. IEEE Trans. Signal Process. 1992, 40, 1168–1184. [Google Scholar] [CrossRef]
- Romer, K. The lighthouse location system for smart dust. In Proceedings of the ACM/USENIX Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 5–8 May 2003; pp. 15–30.
- Rappaport, T.; Reed, J.; Woerner, B. Position location using wireless communications on highways of the future. IEEE Commun. Mag. 1996, 34, 33–41. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Schell, S.V.; Gardner, W.A. High-resolution direction finding. In Handbook of Statistics; Elsevier: Amsterdam, The Netherlands, 1993; Volume 10, pp. 755–817. [Google Scholar]
- Bahl, P.; Padmanabhan, V. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784.
- Roos, T.; Myllymaki, P.; Tirri, H. A statistical modeling approach to location estimation. IEEE Trans. Mob. Comput. 2002, 1, 59–69. [Google Scholar] [CrossRef]
- Ni, L.M.; Yunhao, L.; Cho, L.Y.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 23–26 March 2003; Volume 2, pp. 407–415.
- Stanfield, R.G. Statistical theory of DF finding. J. IEE 1947, 94, 762–770. [Google Scholar]
- Ancker, C.J. Airborne direction finding—Theory of navigation errors. IRE Trans. Aeronaut. Navig. Electron. 1958, 5, 199–210. [Google Scholar] [CrossRef]
- Foy, W.H. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, 12, 187–194. [Google Scholar] [CrossRef]
- Torrieri, D.J. Statistical theory of passive location systems. IEEE Trans. Aerosp. Electron. Syst. 1984, 20, 183–198. [Google Scholar] [CrossRef]
- Porta, J.M.; Terwijn, B.; Krose, B. Efficient entropy-based action selection for appearance-based robot localization. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 2842–2847.
- Patwari, N.; Hero, A.O.; Perkins, M. Relative location estimation in wireless sensor networks. IEEE Trans. Signal Process. 2003, 51, 2137–2148. [Google Scholar] [CrossRef]
- Ihler, A.; Fisher, I.; Moses, J.W.R. Nonparametric belief propagation for self-localization of sensor networks. IEEE J. Sel. Areas Commun. 2005, 23, 809–819. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Distributed Kalman filtering for sensor networks. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 5492–5498.
- Reza-Gholami, M.; Wymeersch, H.; Ström, E.G.; Rydström, M. Wireless network positioning as a convex feasibility problem. EURASIP J. Wirel. Commun. Netw. 2011, 161, 1–15. [Google Scholar]
- Piovan, G.; Shames, I.; Fidan, B.; Bullo, F.; Anderson, B.D.O. On frame and orientation localization for relative sensing networks. Automatica 2013, 49, 206–213. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D.O. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Kannan, A.; Mao, G.; Vucetic, B. Simulated annealing based wireless sensor network localization with flip ambiguity mitigation. In Proceedings of the IEEE Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; pp. 1022–1026.
- Walter, E.; Piet-Lahanier, H. Estimation of parameter bounds from bounded-error data: A survey. Math. Comput. Simul. 1990, 32, 449–468. [Google Scholar] [CrossRef]
- Bancroft, S. Algebraic solution of the GPS equations. IEEE Trans. Aerosp. Electron. Syst. 1985, 21, 56–59. [Google Scholar] [CrossRef]
- Fang, B.T. Simple solutions for hyperbolic and related position fixes. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 748–753. [Google Scholar] [CrossRef]
- Gavish, M.; Weiss, A. Performance analysis of bearing-only target location algorithms. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 817–828. [Google Scholar] [CrossRef]
- Kannan, A.A.; Mao, G.; Vucetic, B. Simulated annealing based localization in wireless sensor network. In Proceedings of the IEEE Conference on Local Computer Networks, Sydney, Australia, 15–17 November 2005; pp. 513–514.
- Tarrío, P.; Bernardos, A.M.; Casar, J.R. Weighted least squares techniques for improved received signal strength based localization. Sensors 2011, 11, 8569–8592. [Google Scholar]
- Shang, Y.; Ruml, W.; Zhang, Y.; Fromherz, M. Localization from connectivity in sensor networks. IEEE Trans. Parallel Distrib. Syst. 2004, 15, 961–974. [Google Scholar] [CrossRef]
- Doherty, L.; Pister, K.; Ghaoui, L.E. Convex position estimation in wireless sensor networks. In Proceedings of the Twentieth Annual Joint Conference of the IEEE Computer and Communications Societies, Anchorage, AK, USA, 22–26 April 2000; Volume 3, pp. 1655–1663.
- Biswas, P.; Ye, Y. Semidefinite programming for ad hoc wireless sensor network localization. In Proceedings of the International Symposium on Information Processing in Sensor Networks, Los Angeles, CA, USA, 25–27 April 2000; pp. 46–54.
- Aspnes, J.; Eren, T.; Goldenberg, D.; Morse, A.; Whiteley, W.; Yang, Y.; Anderson, B.D.O.; Belhumeur, P. A theory of network localization. IEEE Trans. Mob. Comput. 2006, 5, 1663–1678. [Google Scholar] [CrossRef]
- Xu, Y.; Ouyang, Y.; Le, Z.; Ford, J.; Makedon, F. Mobile anchor-free localization for wireless sensor networks. In Distributed Computing in Sensor Systems; Springer: Berlin, Germany, 2007; Volume 4549, pp. 96–109. [Google Scholar]
- Alfakih, A.; Khandani, A.; Wolkowicz, H. Solving Euclidean distance matrix completion problems via semidefinite programming. Comput. Optim. Appl. 1999, 12, 13–30. [Google Scholar] [CrossRef]
- Biswas, P.; Lian, T.; Wang, T.; Ye, Y. Semidefinite programming based algorithms for sensor network localization. ACM Trans. Sens. Netw. 2006, 2, 188–220. [Google Scholar] [CrossRef]
- Porta, J.M.; Ros, L.; Thomas, F. On the trilaterable six-degree-of-freedom parallel and serial manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 960–967.
- Savarese, C.; Rabaey, J. Robust positioning algorithms for distributed ad-hoc wireless sensor networks. In Proceedings of the USENIX Annual Technical Conference, Monterey, CA, USA, 10–15 June 2002; pp. 317–327.
- Nagpal, R.; Shrobe, H.; Bachrach, J. Organizing a global coordinate system from local information on an ad hoc sensor network. In Proceedings of the International Workshop on Sensor Networks, Palo Alto, CA, USA, 22–23 April 2003.
- Capkun, S.; Hamdi, M.; Hubaux, J. GPS-free positioning in mobile ad-hoc networks. In Proceedings of the 34th Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 3–6 January 2001; pp. 3481–3490.
- Schoenberg, I.J. Remarks on a F. Fréchet’s article. Ann. Math. 1935, 36, 724–732. [Google Scholar] [CrossRef]
- He, K.; Xu, T.; Förste, C.; Petrovic, S.; Barthelmes, F.; Jiang, N.; Flechtner, F. GNSS precise kinematic positioning for multiple kinematic stations based on a priori distance constraints. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Alefeld, G.; Mayer, G. The Cholesky method for interval data. Linear Algebra Its Appl. 1993, 194, 161–182. [Google Scholar] [CrossRef]
- Garloff, J. Pivot tightening for the interval cholesky method. Proc. Appl. Math. Mech. 2010, 10, 549–550. [Google Scholar] [CrossRef]
- Alefeld, G.; Herzberger, J. Introduction to Interval Computations; Academic Press: Orlando, FL, USA, 1983. [Google Scholar]
- Untiedt, E.; Lodwick, W. Using gradual numbers to analyze non-monotonic functions of fuzzy intervals. In Proceedings of the Annual Meeting of the North American Fuzzy Information Processing Society, New York, NY, USA, 19–22 May 2008.
- Dress, A.; Havel, T. Shortest-path problems and molecular conformation. Discret. Appl. Math. 1988, 19, 129–144. [Google Scholar] [CrossRef]
- Nagatani, K.; Okada, Y.; Tokunaga, N.; Kiribayashi, S.; Yoshida, K.; Ohno, K.; Takeuchi, E.; Tadokoro, S.; Akiyama, H.; Noda, I.; et al. Multirobot exploration for search and rescue missions: A report on map building in RoboCupRescue 2009. J. Field Robot. 2011, 28, 373–387. [Google Scholar] [CrossRef]
- Girard, A.R.; Borges de Sousa, J.; Hedrick, J.K. A selection of recent advances in networked multivehicle systems. Proc. Inst. Mech. Eng. I J. Syst. Control Eng. 2005, 219, 1–14. [Google Scholar] [CrossRef]
- Poduri, S.; Sukhatme, G. Constrained coverage for mobile sensor networks. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 165–171.
- Lázaro, J.L.; Cano, A.E.; Fernández, P.R.; Luna, C.A. Sensor for distance estimation using FFT of images. Sensors 2009, 9, 10434–10446. [Google Scholar] [CrossRef] [PubMed]
- Hahnel, D.; Burgard, W.; Fox, D.; Fishkin, K.; Philipose, M. Mapping and localization with RFID technology. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1015–1020.
- Traslosheros, A.; Sebastián, J.M.; Torrijos, J.; Carelli, R.; Castillo, E. An inexpensive method for kinematic calibration of a parallel robot by using one hand-held camera as main sensor. Sensors 2013, 13, 9941–9965. [Google Scholar] [CrossRef] [PubMed]
- Rojas, N.; Borras, J.; Thomas, F. The octahedral manipulator revisited. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2293–2298.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Porta, J.M.; Rull, A.; Thomas, F. Sensor Localization from Distance and Orientation Constraints. Sensors 2016, 16, 1096. https://doi.org/10.3390/s16071096
Porta JM, Rull A, Thomas F. Sensor Localization from Distance and Orientation Constraints. Sensors. 2016; 16(7):1096. https://doi.org/10.3390/s16071096
Chicago/Turabian StylePorta, Josep M., Aleix Rull, and Federico Thomas. 2016. "Sensor Localization from Distance and Orientation Constraints" Sensors 16, no. 7: 1096. https://doi.org/10.3390/s16071096
APA StylePorta, J. M., Rull, A., & Thomas, F. (2016). Sensor Localization from Distance and Orientation Constraints. Sensors, 16(7), 1096. https://doi.org/10.3390/s16071096