
Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units


Abstract
:1. Introduction
2. Calibration Model of Ultra-High Accuracy IMUs
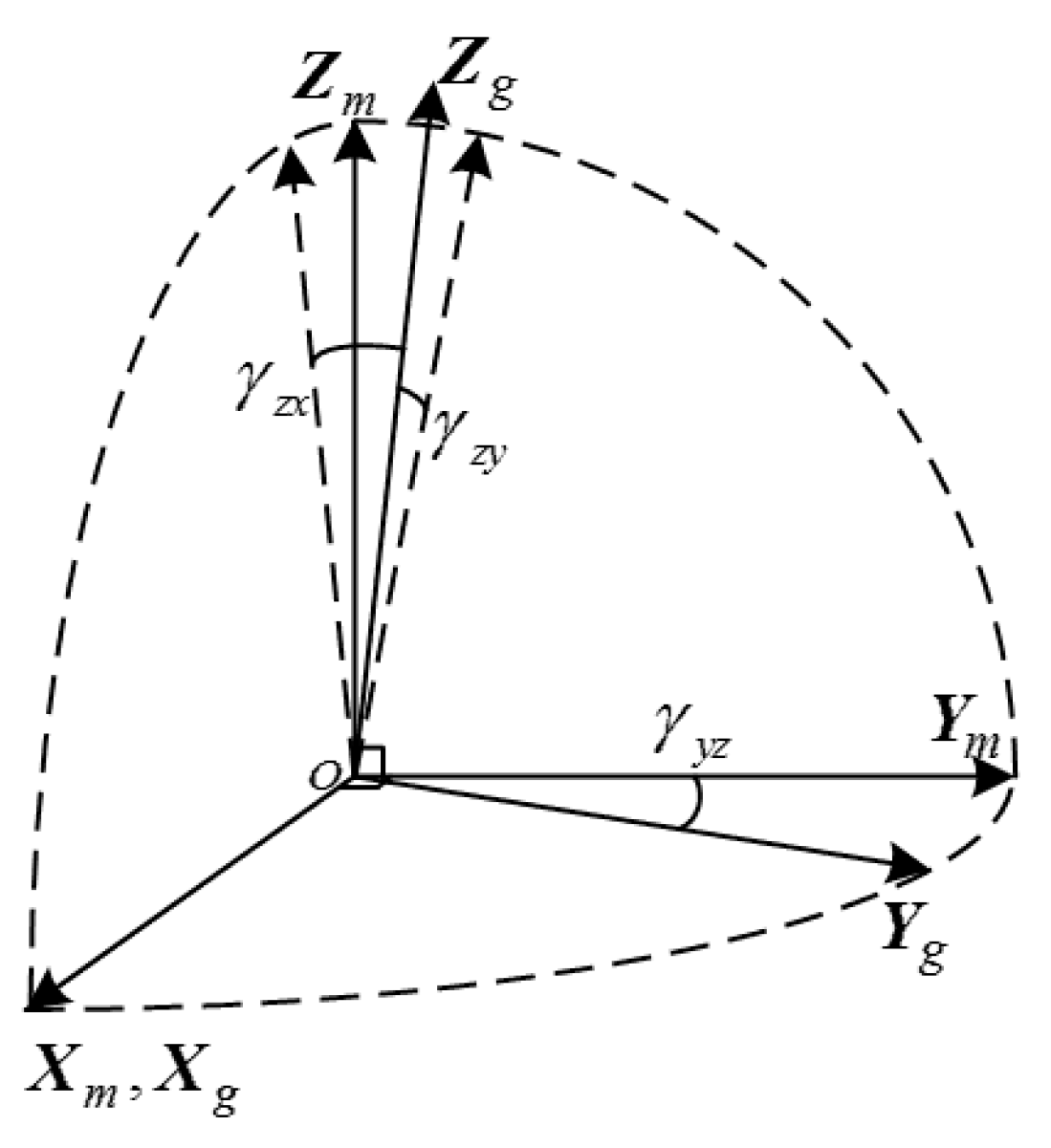
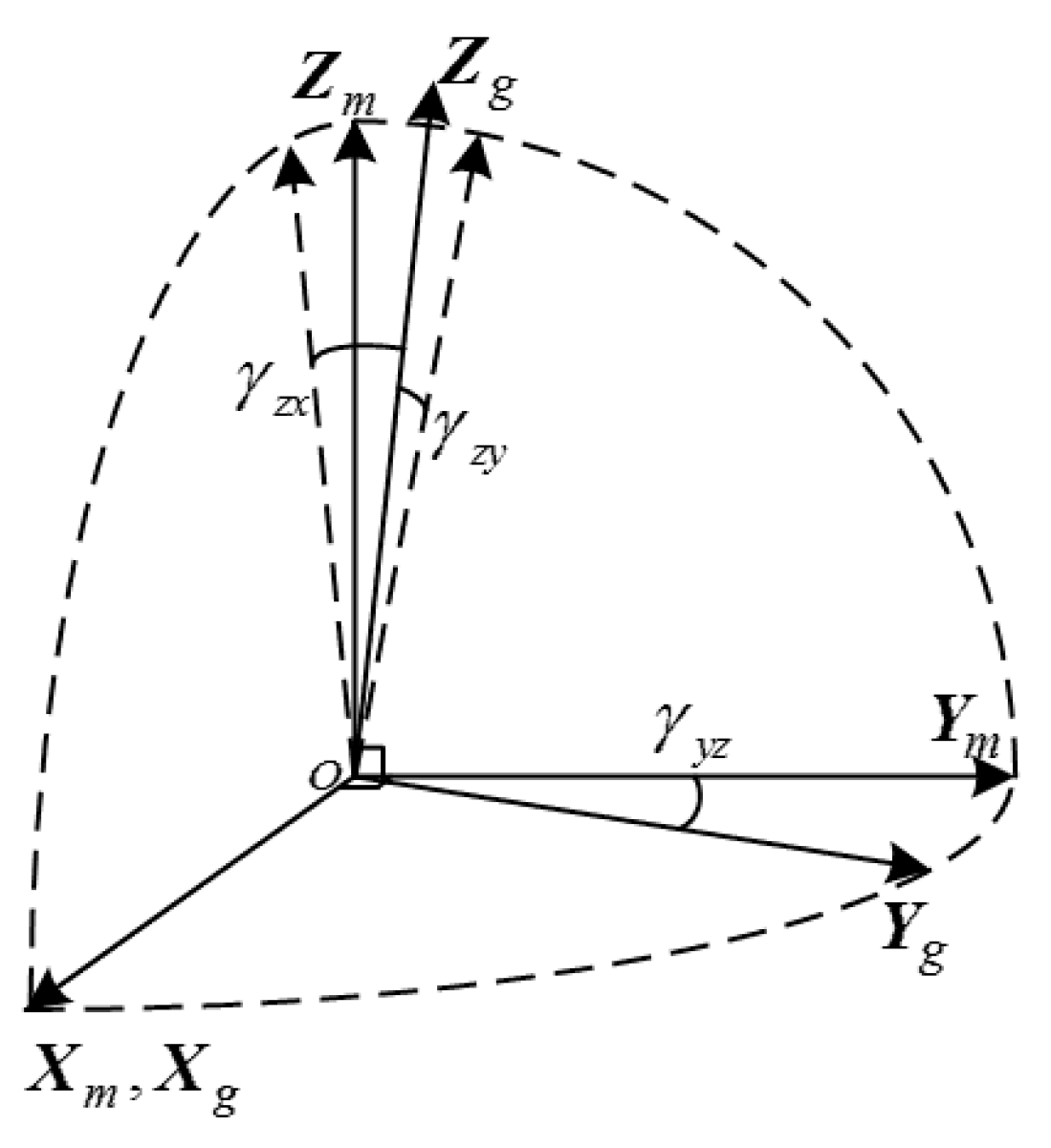
2.1. Calibration Model of Ultrahigh-Accuracy Gyro Triads
2.2. Calibration Model of Ultrahigh-Accuracy Accelerometer Triad
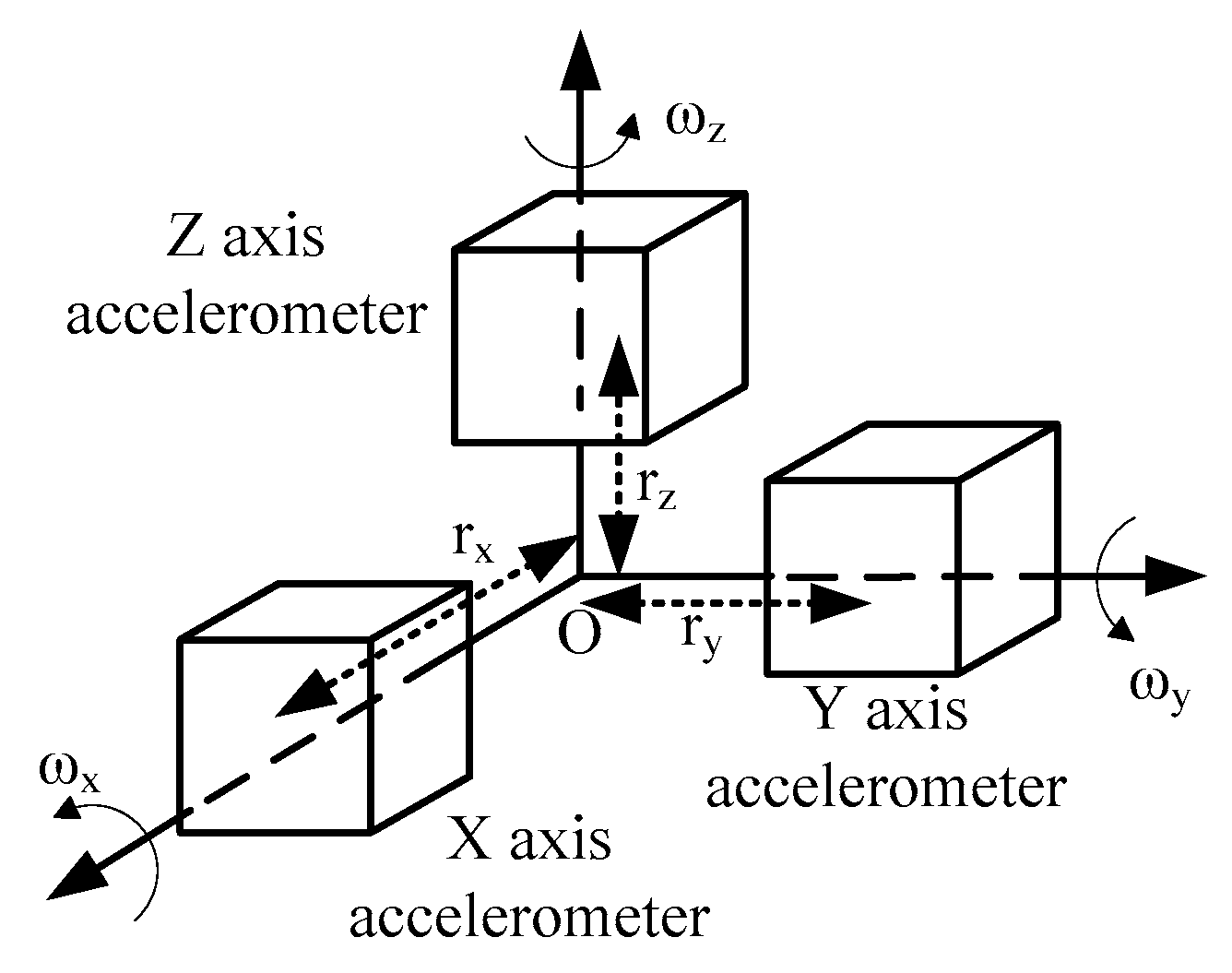
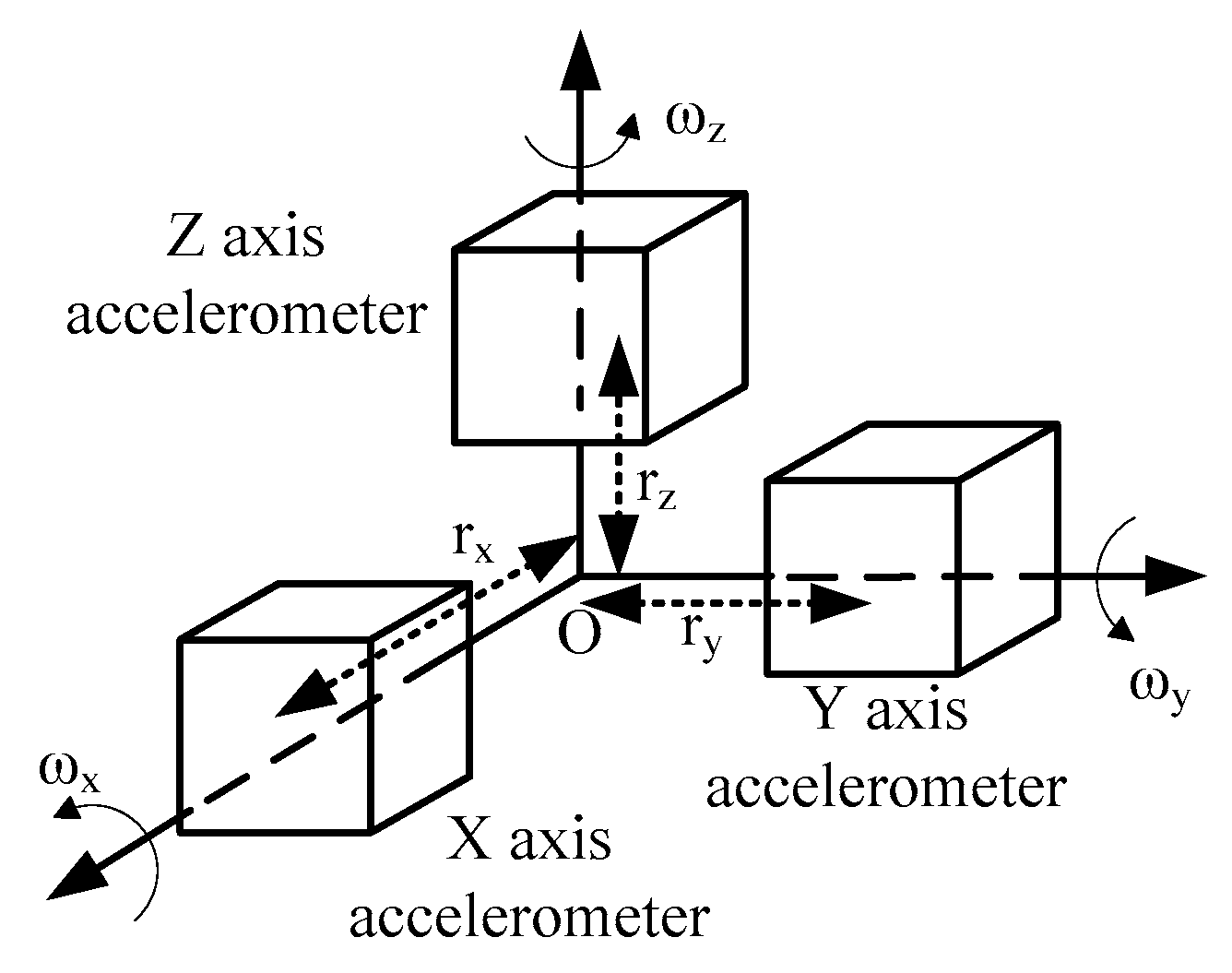
2.3. Calibration Model of Lever Arm Errors
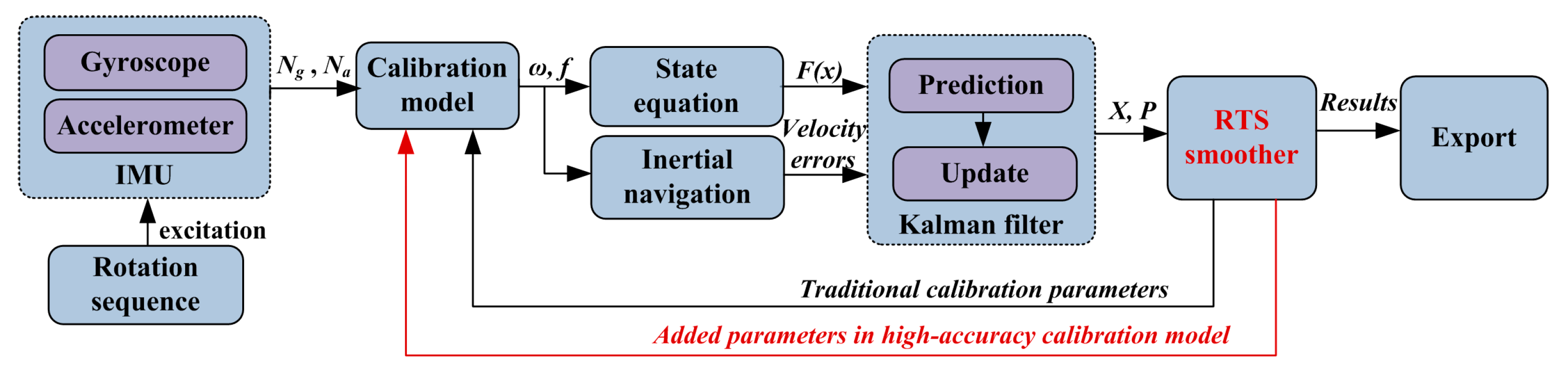
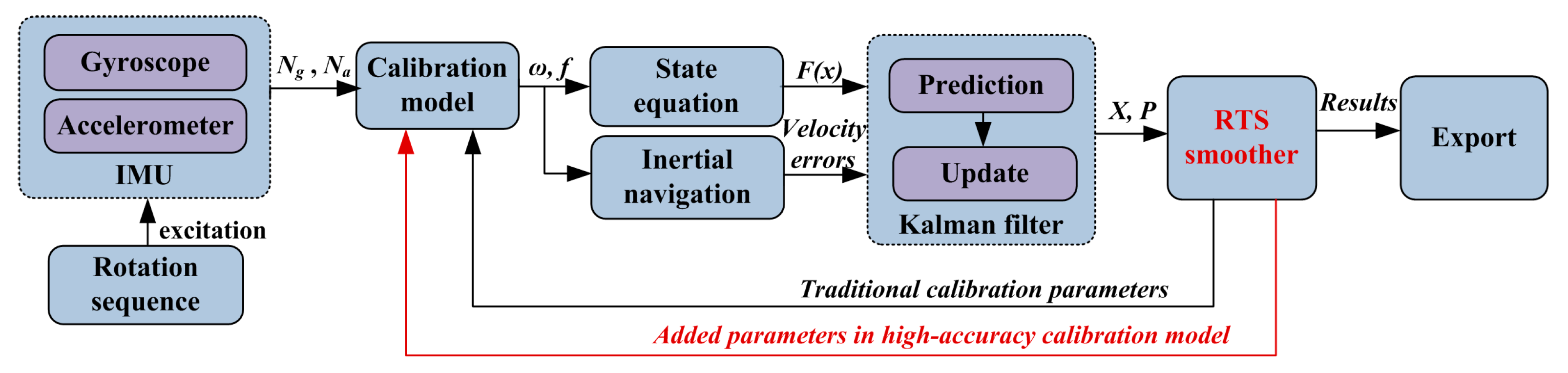
3. Systematic Calibration Method Based on Optimal Estimation Filter
3.1. Principle of Systematic Calibration
3.2. Kalman Filtering and RTS Smoothing
3.3. State Equation of Systematic Calibration Filter
3.4. Rotation Sequence
4. Simulation and Laboratory Tests
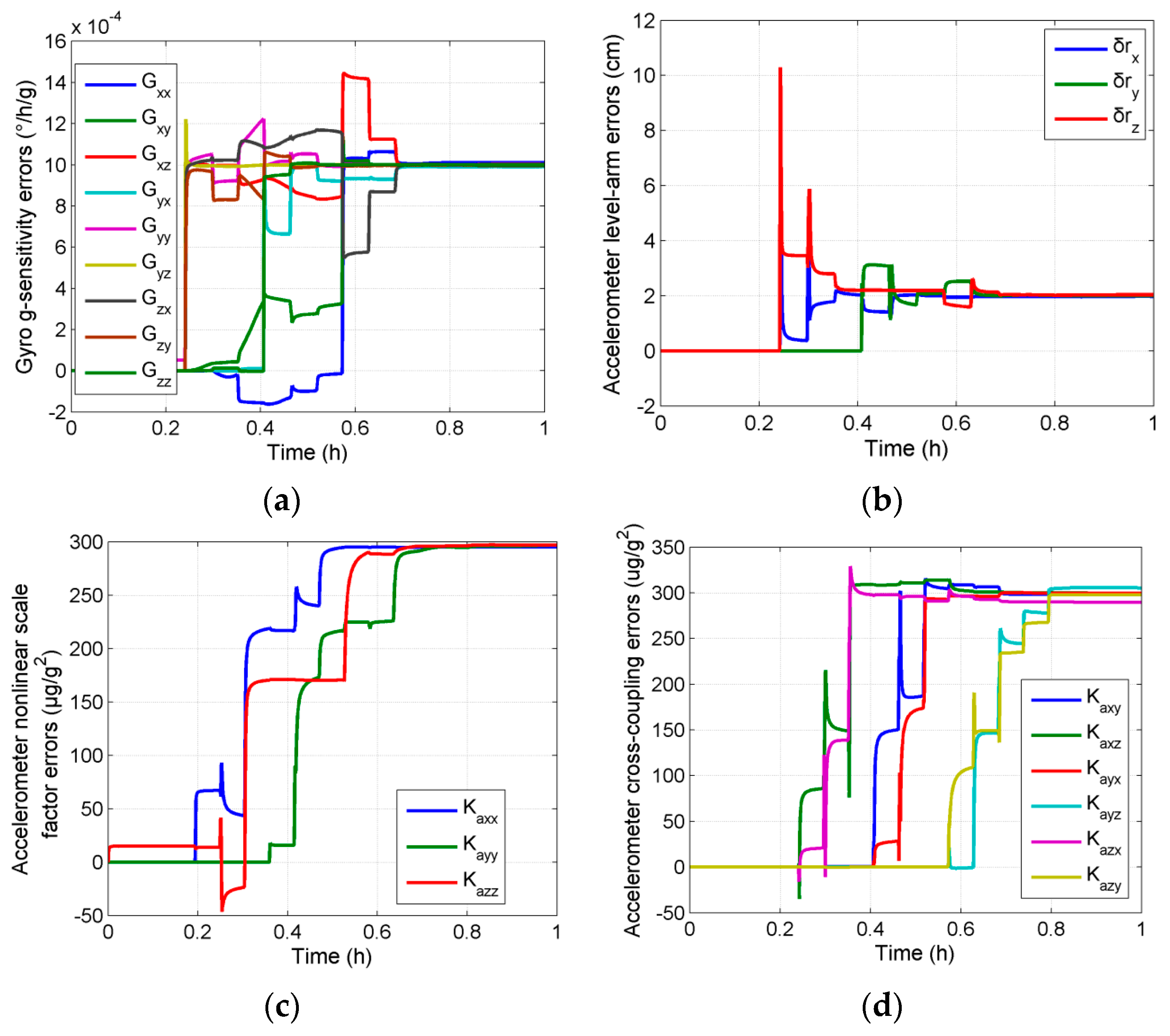
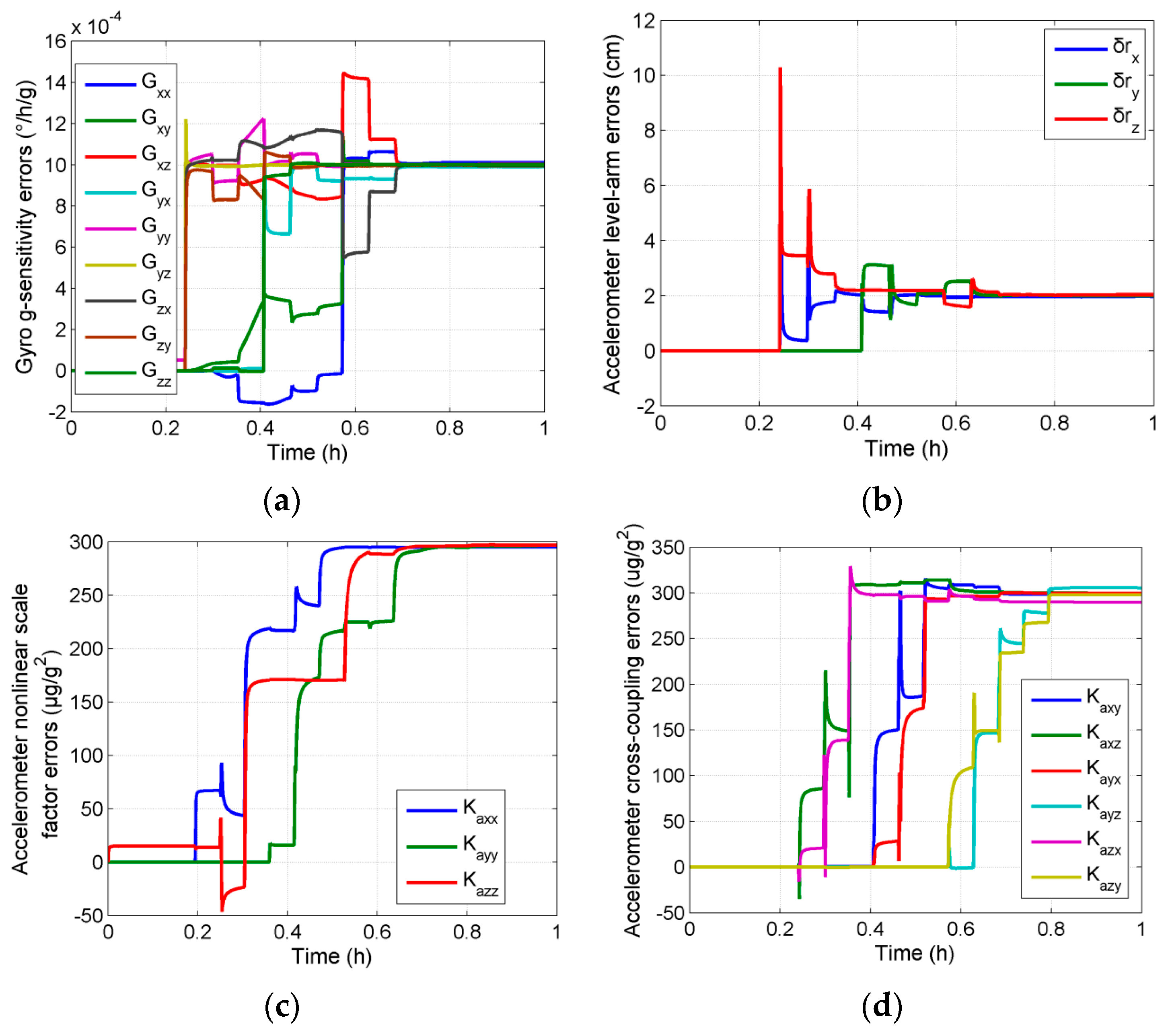
4.1. Simulation Test
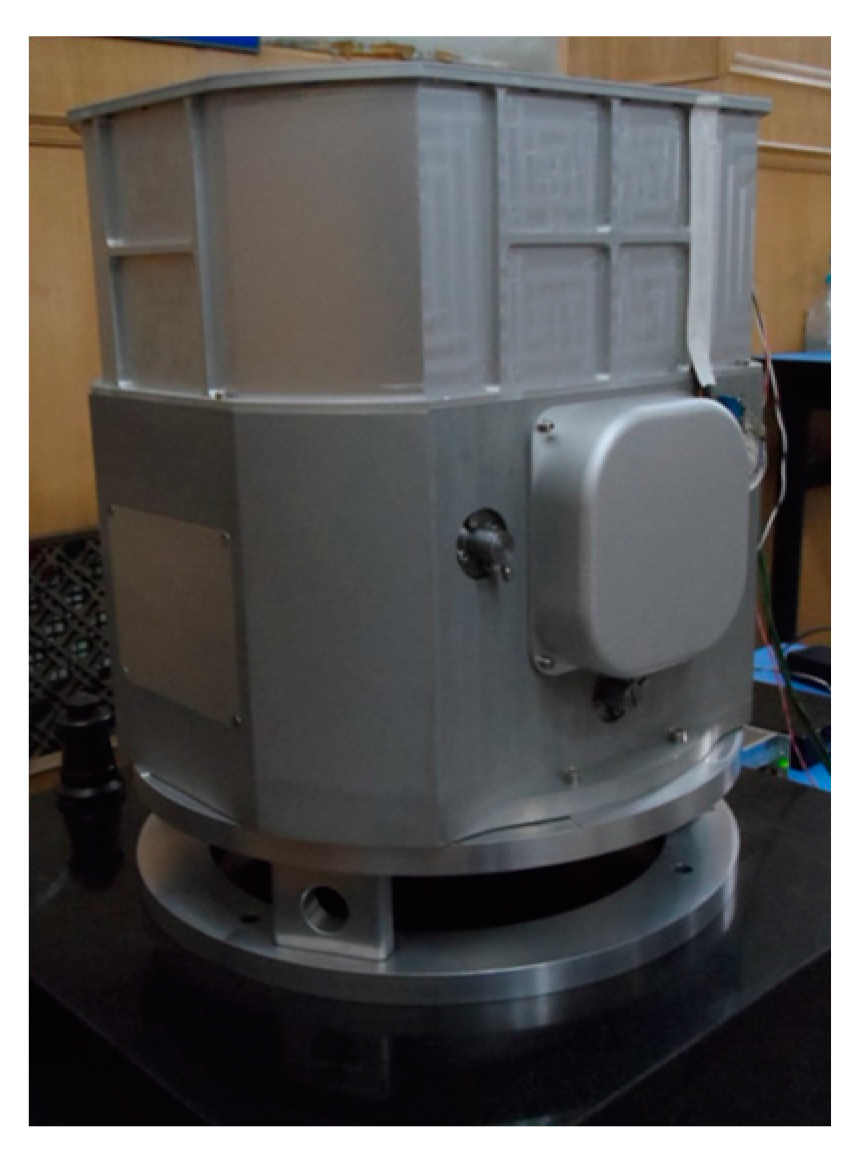
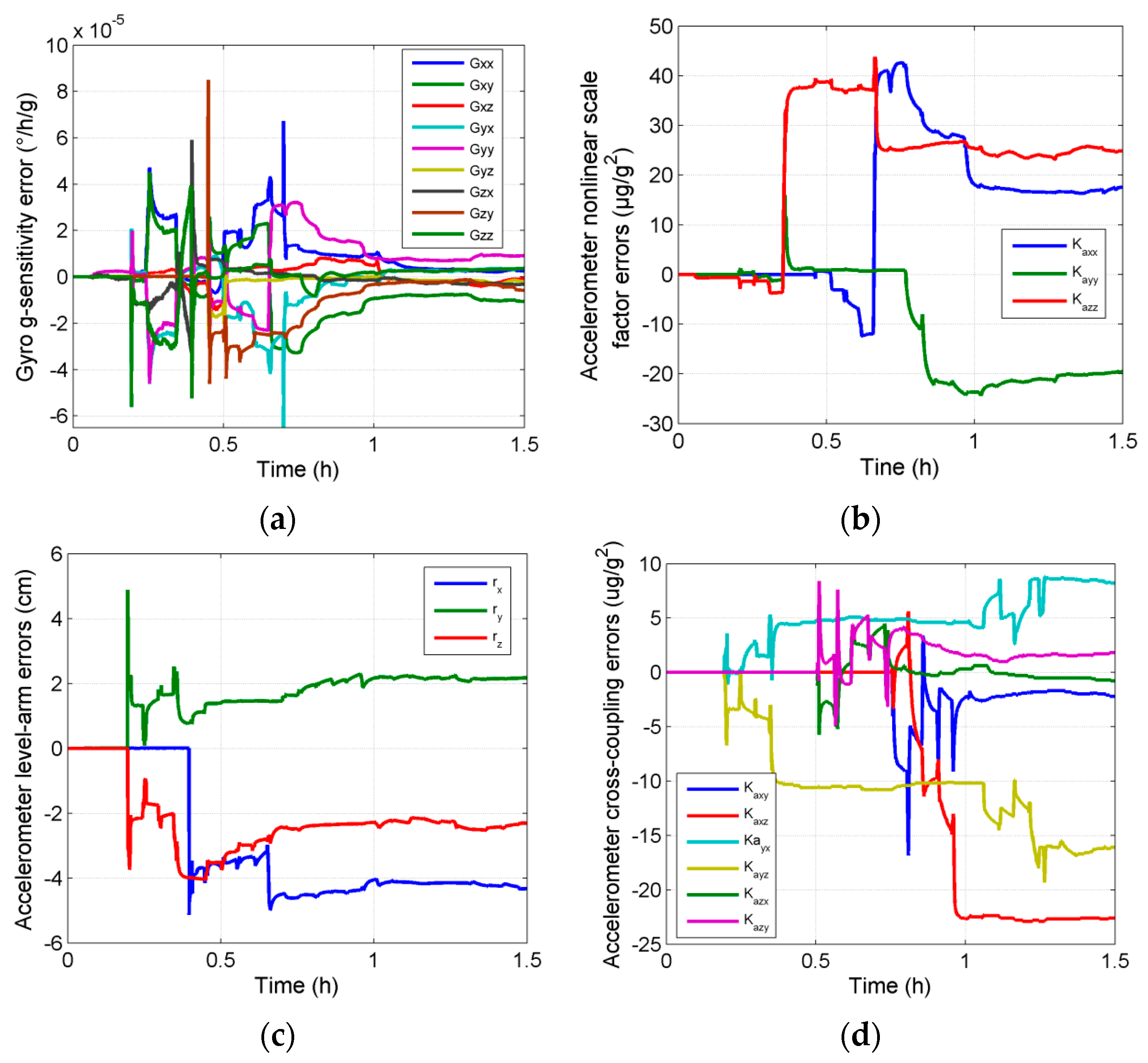
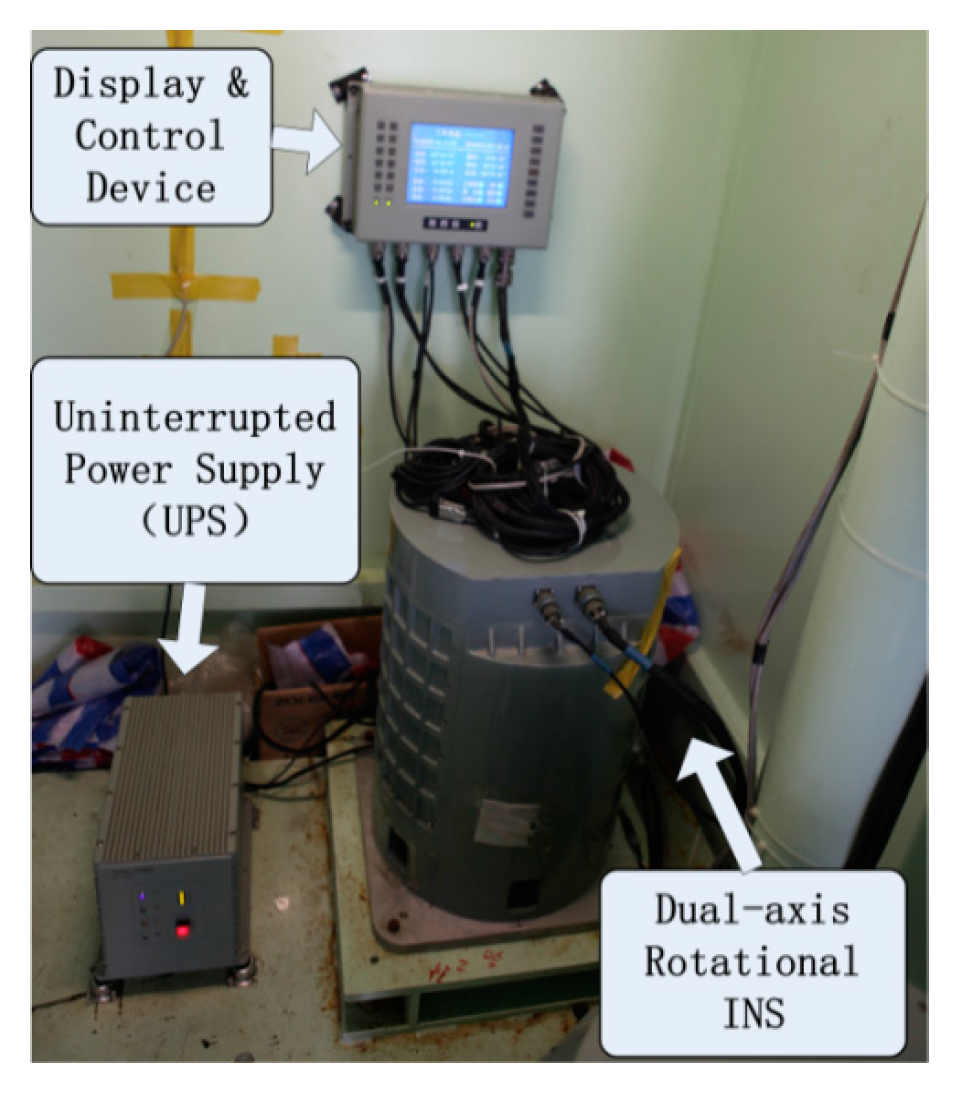
4.2. Laboratory Test
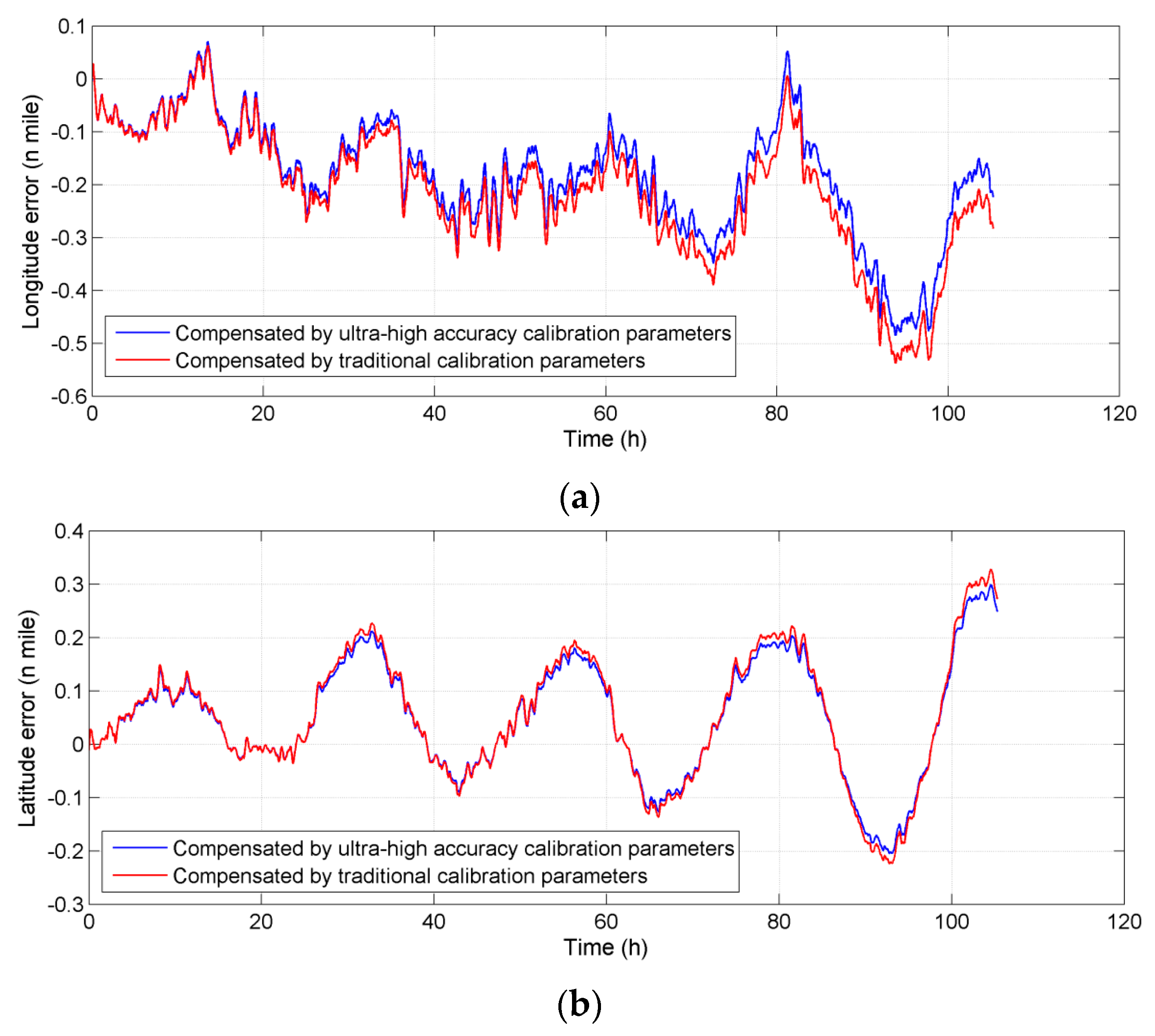
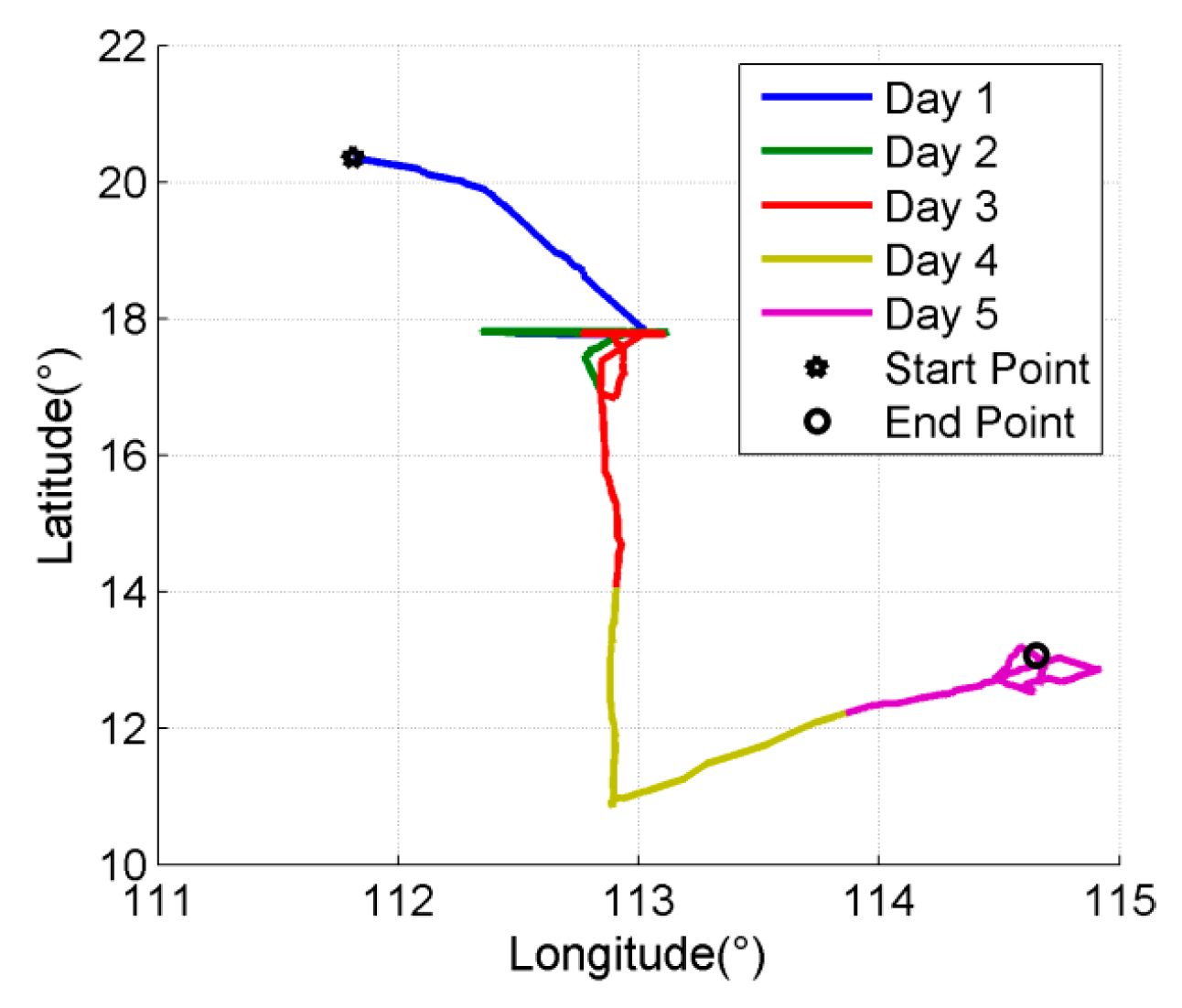
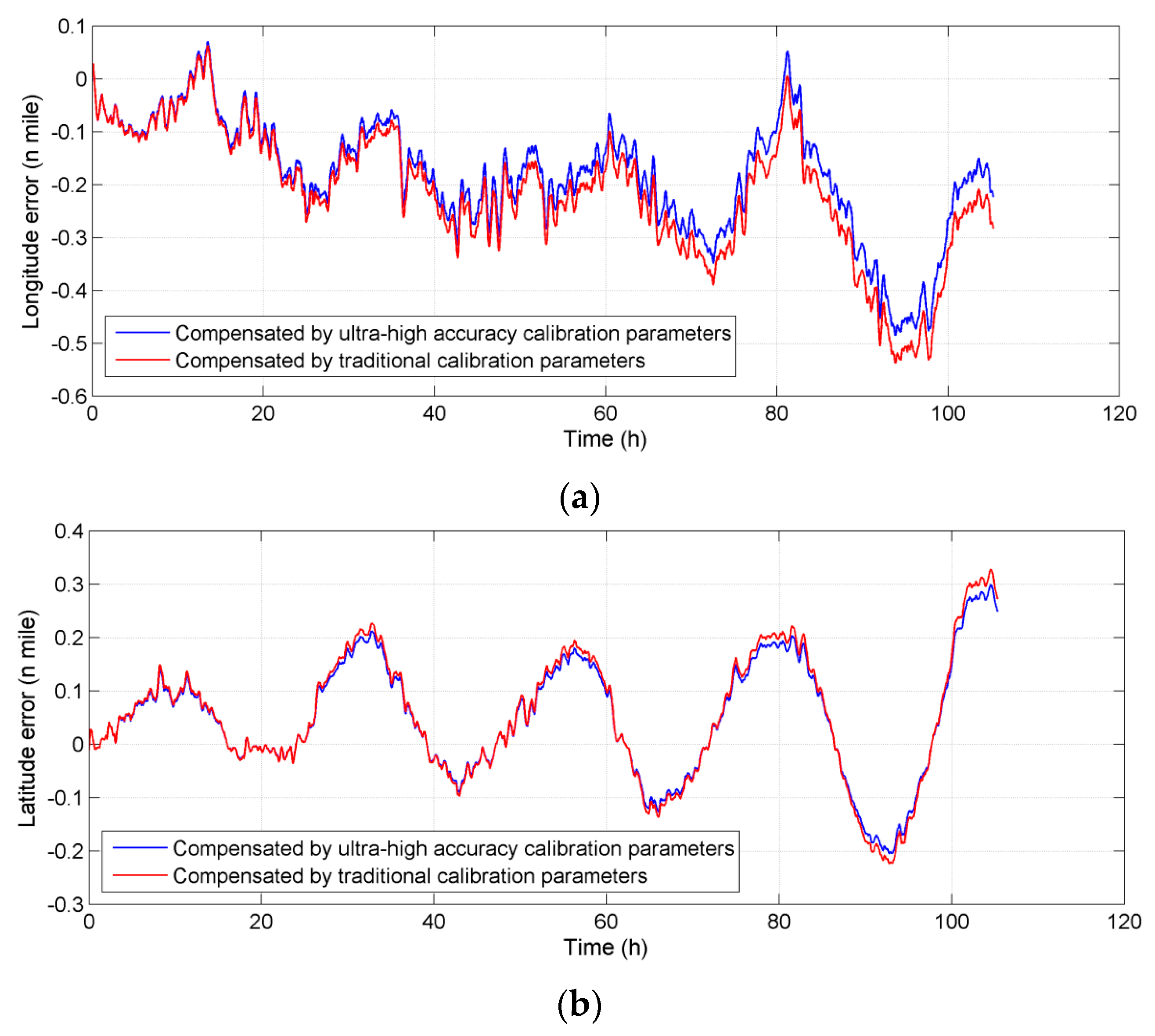
4.3. Sailing Test
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Fang, J.; Qin, J. Advances in atomic gyros: A view from inertial navigation applications. Sensors 2012, 12, 6331–6346. [Google Scholar] [CrossRef] [PubMed]
- Meyer, D.; Larsen, M. Nuclear magnetic resonance gyro for inertial navigation. Gyroscopy Navig. 2014, 5, 75–82. [Google Scholar] [CrossRef]
- Tackmann, G.; Berg, P.; Schubert, C.; Abend, S.; Gilowski, M. Self-alignment of a compact large-area atomic sagnac interferometer. New J. Phys. 2012, 14, 1–13. [Google Scholar] [CrossRef]
- Fang, J.; Wan, S.; Yuan, H. Dynamics of an all-optical atomic spin gyroscope. Appli. Opt. 2013, 52, 7220–7227. [Google Scholar] [CrossRef] [PubMed]
- Gauguet, V.; Canuel, B.; Lévèque, T.; Chaibi, W.; Landragin, A. Characterization and limits of a cold-atom sagnac interferometer. Phys. Rev. A 2009, 80, 063604. [Google Scholar] [CrossRef]
- Jekeli, C. Navigation error analysis of atom interferometer inertial sensor. Navigation 2005, 52, 1–14. [Google Scholar] [CrossRef]
- Cai, Q.; Song, N.; Yang, G.; Liu, Y. Accelerometer calibration with nonlinear scale factor based on multi-position observation. Meas. Sci. Technol. 2013, 24, 105002. [Google Scholar] [CrossRef]
- Pan, J.; Zhang, C.; Cai, Q. An accurate calibration method for accelerometer nonlinear scale factor on a low-cost three-axis turntable. Meas. Sci. Technol. 2014, 25, 025102. [Google Scholar] [CrossRef]
- Chen, F.; Hu, P.; He, X.; Tang, K.; Luo, B. Observability analysis of a MEMS INS/GPS integration system with gyro g-sensitivity errors. Sensors 2014, 14, 16003–16016. [Google Scholar]
- Zheng, Z.; Han, S.; Zheng, K. An eight-position self-calibration method for a dual-axis rotational inertial navigation system. Sens. Actuators A Phys. 2015, 232, 39–48. [Google Scholar] [CrossRef]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 1897–1907. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, Y.; Wu, W.; Wu, M.; Hu, X. Improved multi-position calibration for inertial measurement units. Meas. Sci. Technol. 2011, 21, 015107. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Rotation | Attitude after Rotation | |||
|---|---|---|---|---|---|
| Rotation Axis | Rotation Angle | X-Axis | Y-Axis | Z-Axis | |
| 0 | - | - | east | north | upwards |
| 1 | outer | +90° | east | upwards | south |
| 2 | outer | +180° | east | downwards | north |
| 3 | outer | +180° | east | upwards | south |
| 4 | inner | +90° | upwards | west | south |
| 5 | inner | +180° | downwards | east | south |
| 6 | inner | +180° | upwards | west | south |
| 7 | outer | +90° | south | west | downwards |
| 8 | outer | +180° | north | west | upwards |
| 9 | outer | +180° | south | west | downwards |
| 10 | outer | +90° | downwards | west | north |
| 11 | outer | +90° | north | west | upwards |
| 12 | outer | +90° | upwards | west | south |
| 13 | inner | +90° | west | downwards | south |
| 14 | inner | +90° | downwards | east | south |
| 15 | inner | +90° | east | upwards | south |
| 16 | outer | +90° | east | south | downwards |
| 17 | outer | +90° | east | downwards | north |
| 18 | outer | +90° | east | north | upwards |
| Calibrated Parameters | Errors before Filter | Errors after Filter |
|---|---|---|
| Gyro g-sensitivity error (°/h/g) | 0.001 | 0.0002 |
| Accelerometer nonlinear scale error (μg/g2) | 300 | 1.3 |
| Accelerometer cross-coupling error (μg/g2) | 300 | 1.5 |
| Accelerometer lever arm errors (cm) | 2 | 0.01 |
| Parameters | Calibration Result | ||
|---|---|---|---|
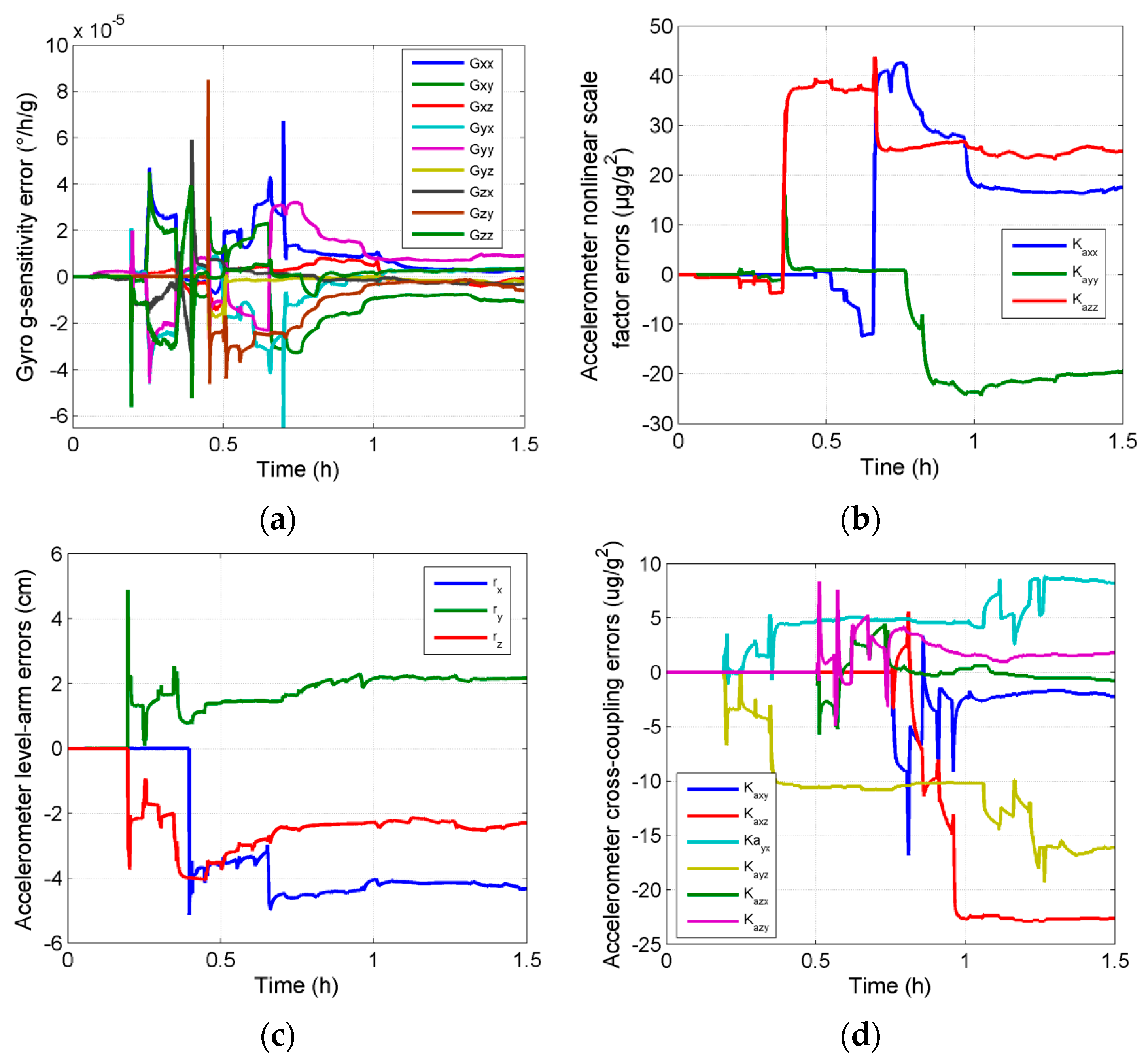
| Gyro g-sensitivity error (°/h/g) | Gxx: 0.09 × 10−5 | Gxy: 0.25 × 10−5 | Gxz: −0.22 × 10−5 |
| Gyx: 0.35 × 10−5 | Gyy: 0.81 × 10−5 | Gyz: −0.24 × 10−5 | |
| Gzx: −0.07 × 10−5 | Gzy: −0.50 × 10−5 | Gzz: −1.02 × 10−5 | |
| Accelerometer nonlinear scale error (μg/g2) | Kaxx: 17.1 | Kayy: −20.4 | Kazz: 25.2 |
| Accelerometer cross-coupling error (μg/g2) | Kaxy: −2.0 | Kaxz: −22.6 | Kayx: 7.8 |
| Kayz: 16.5 | Kazx: −0.5 | Kazy: 1.6 | |
| Accelerometer lever arm errors (cm) | rx: −4.1 | ry: 2.2 | rz: −2.4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Q.; Yang, G.; Song, N.; Liu, Y. Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units. Sensors 2016, 16, 940. https://doi.org/10.3390/s16060940
Cai Q, Yang G, Song N, Liu Y. Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units. Sensors. 2016; 16(6):940. https://doi.org/10.3390/s16060940
Chicago/Turabian StyleCai, Qingzhong, Gongliu Yang, Ningfang Song, and Yiliang Liu. 2016. "Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units" Sensors 16, no. 6: 940. https://doi.org/10.3390/s16060940
APA StyleCai, Q., Yang, G., Song, N., & Liu, Y. (2016). Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units. Sensors, 16(6), 940. https://doi.org/10.3390/s16060940