
A High-Spin Rate Measurement Method for Projectiles Using a Magnetoresistive Sensor Based on Time-Frequency Domain Analysis


Abstract
:1. Introduction
2. Mathematical Model
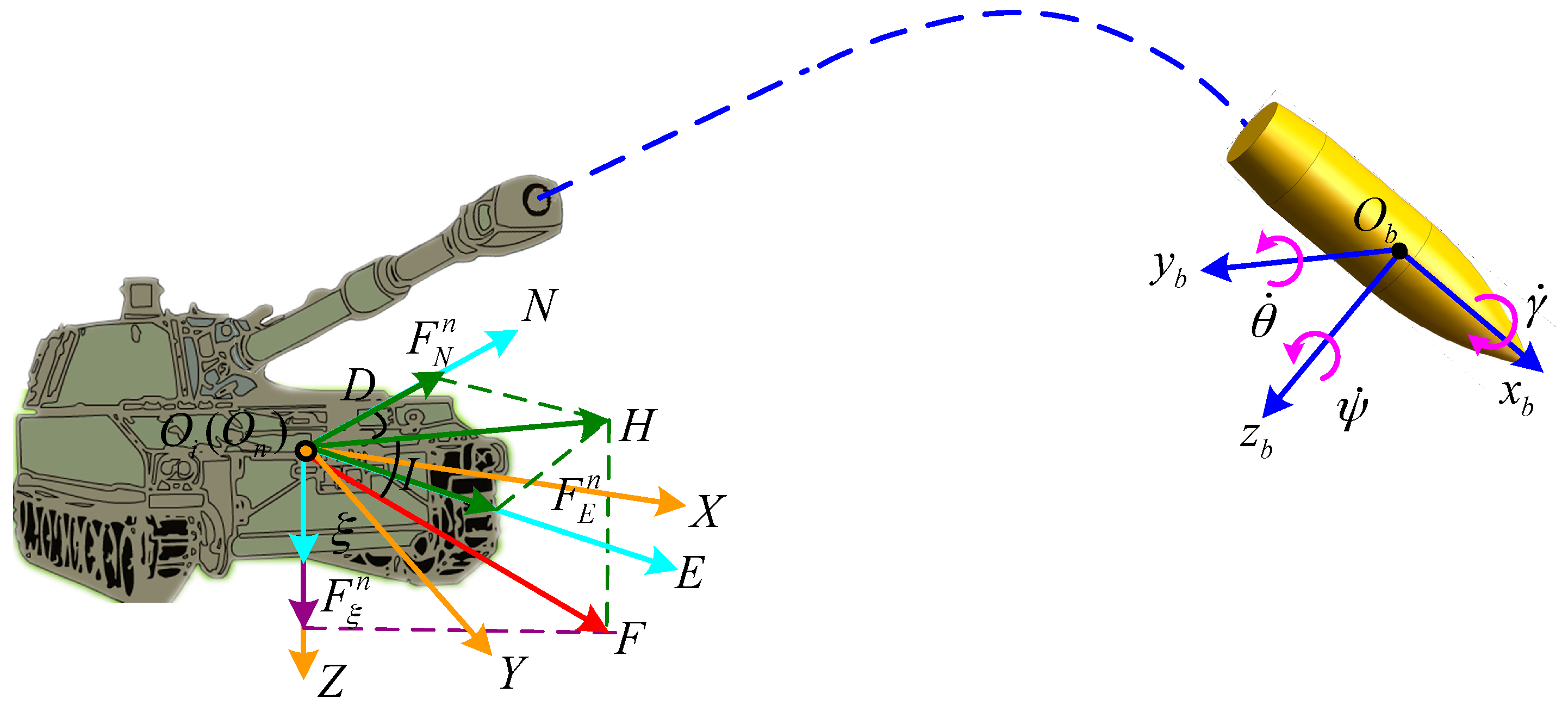
2.1. Coordinate Systems and Parameters
2.2. Deriving Projectile Spin Rate with a MR Sensor
2.3. The Measurement Deviation of the Projectile Spin Rate
3. Tracking Frequency Using BCZT TF Domain Analysis Method
3.1. Signal Model
3.2. BCZT TF Domain Analysis Method
- (1)
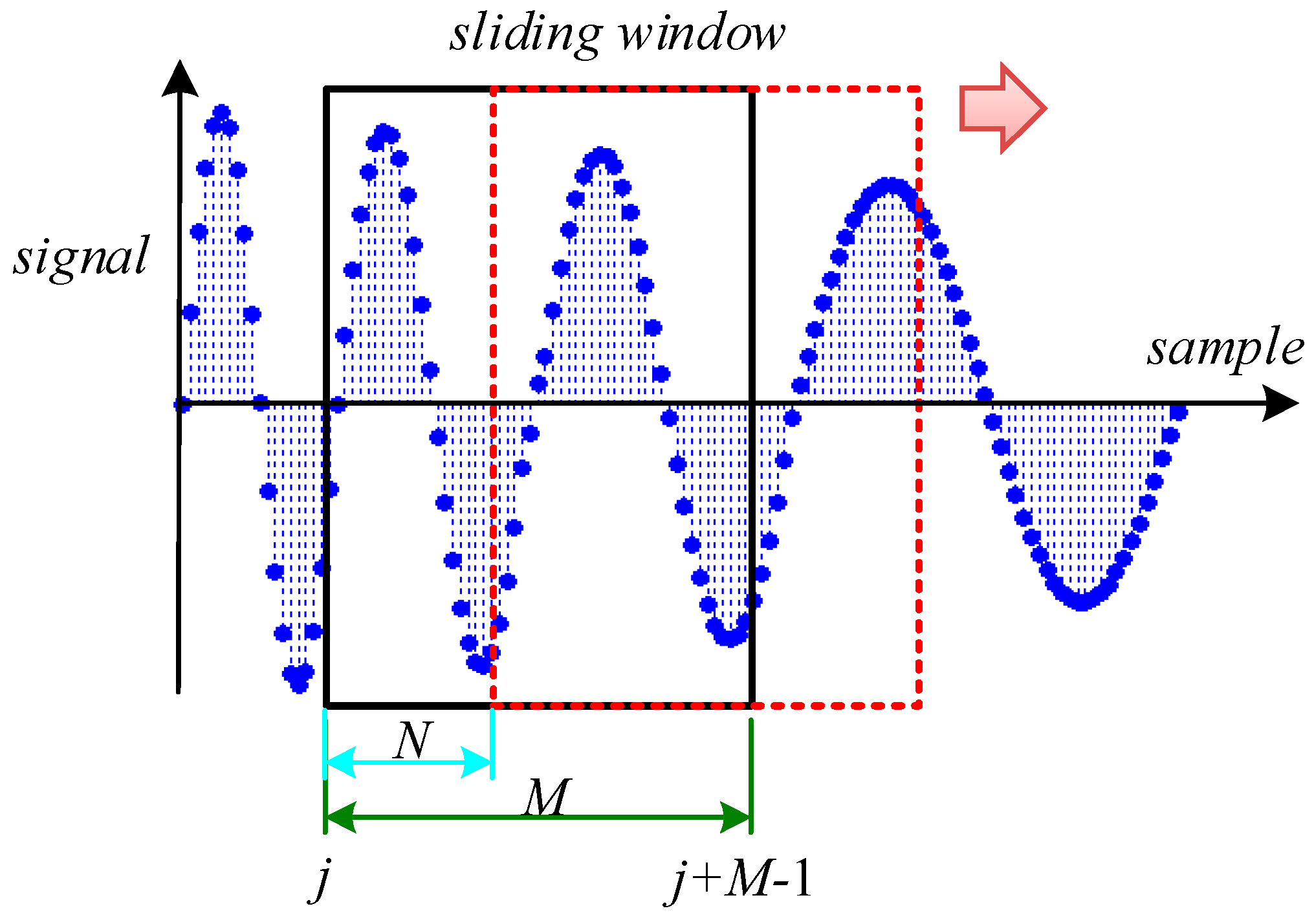
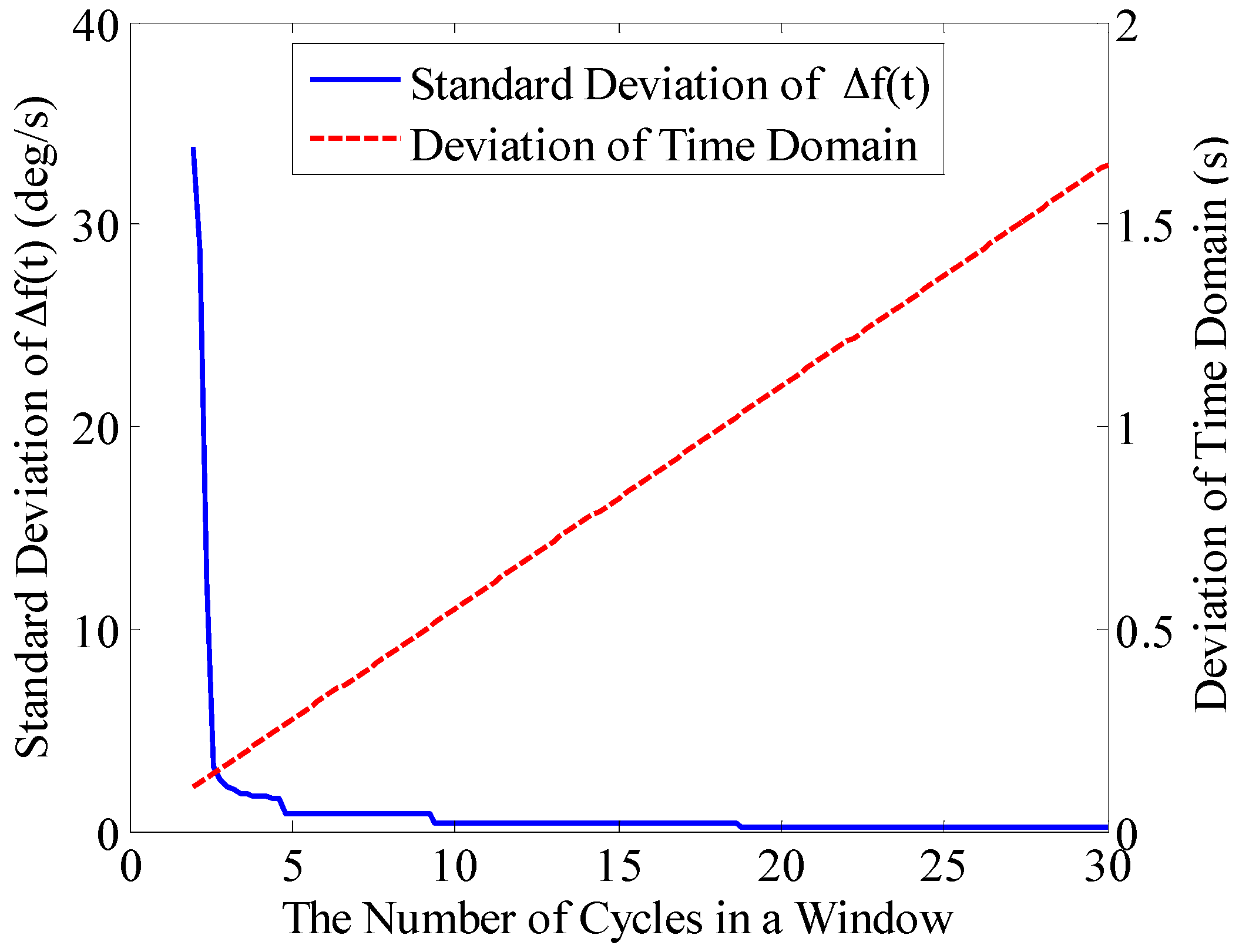
- As M is bigger, the frequency resolution is higher, but the time resolution is lower.
- (2)
- (M–1) samples’ frequencies cannot be obtained, which results in the deviation of the time domain (M–1)Δt. The bigger M is, the bigger the deviation is.
- (3)
- N, the width between two adjacent measurement windows determines the density of TF information. The larger N is, the better real-time performance is.
- (4)
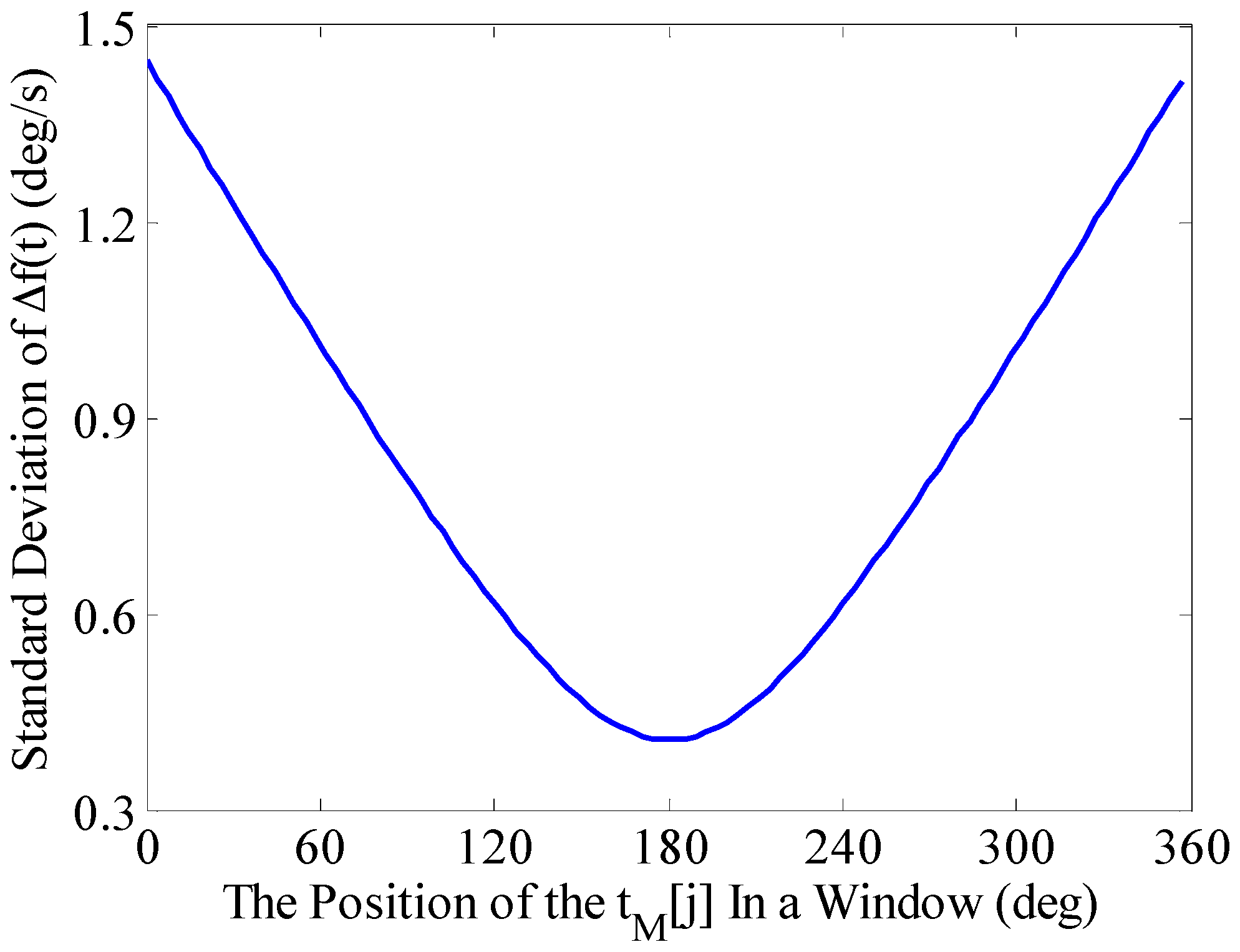
- As is assumed that the corresponding time position tM[j] of the frequency fM[j] is in the middle of the measurement window. Considering the frequency characteristics of the actual signal, time position tM[j] can be adjusted accordingly in order to achieve higher accuracy of TF analysis.
- (5)
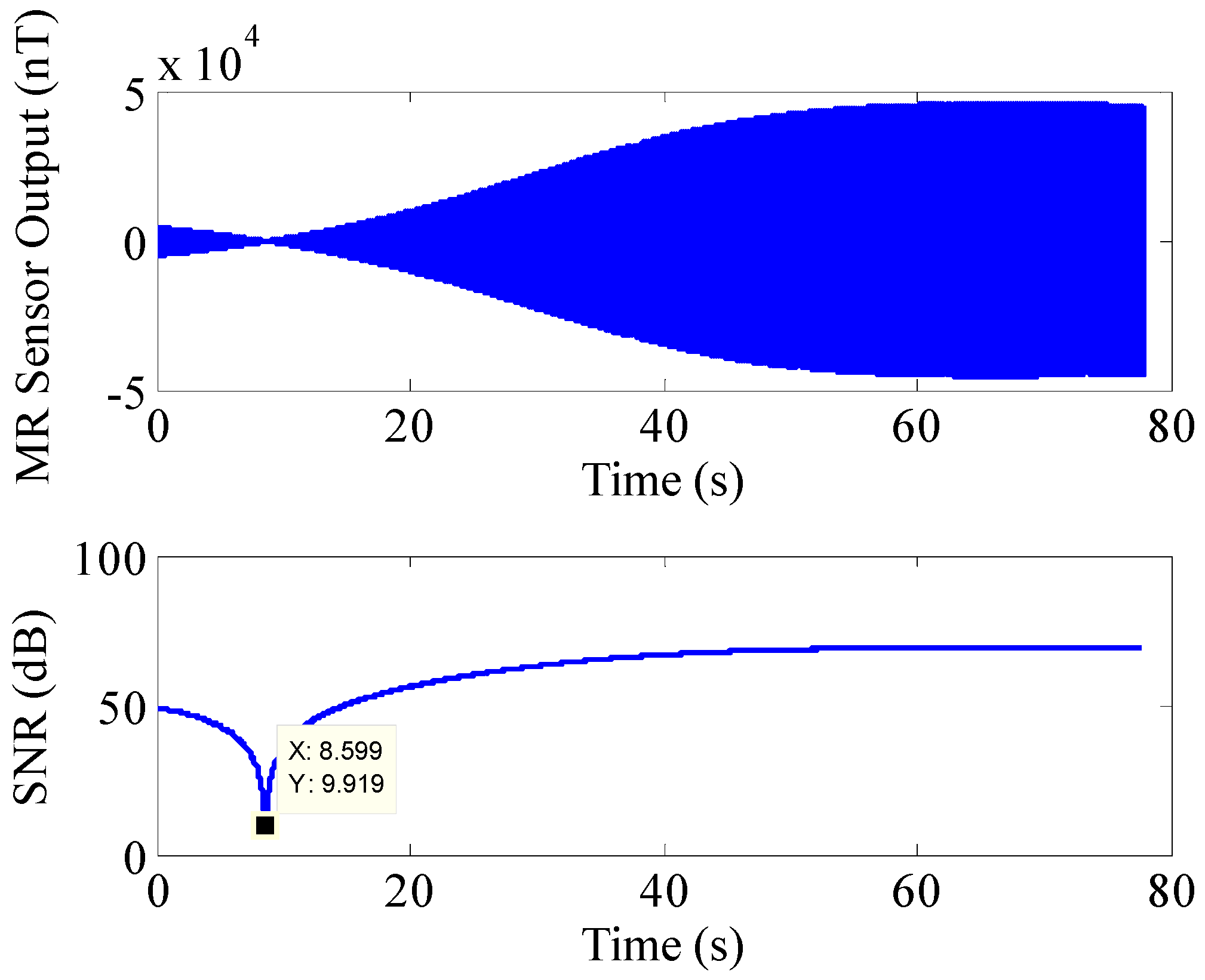
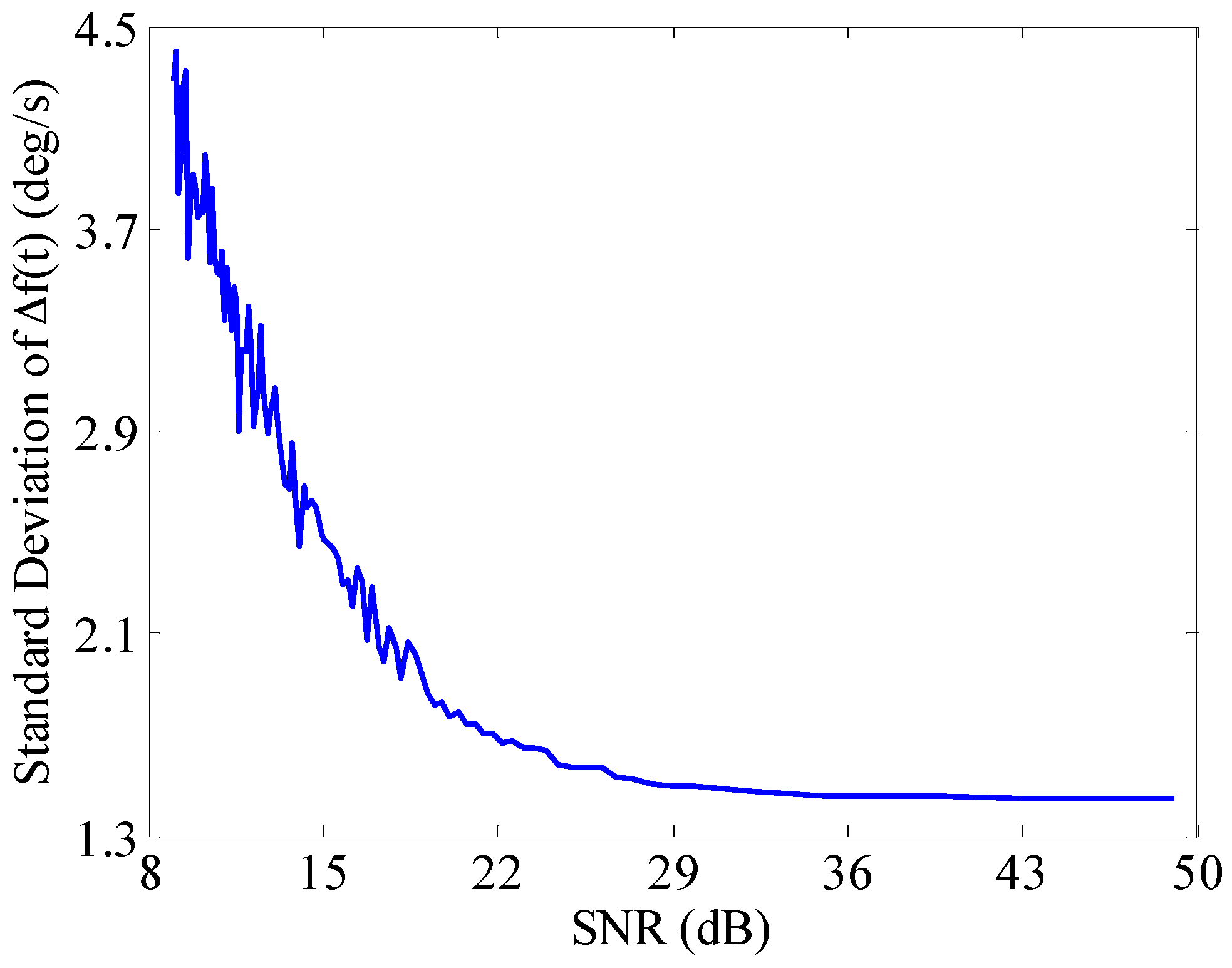
- The accuracy of the BCZT is affected by the signal-to-noise ratio (SNR).
3.3. Performance Assessment
3.3.1. Measurement Window Width
3.3.2. The Time Position Corresponding to the Frequency in the Measurement Window
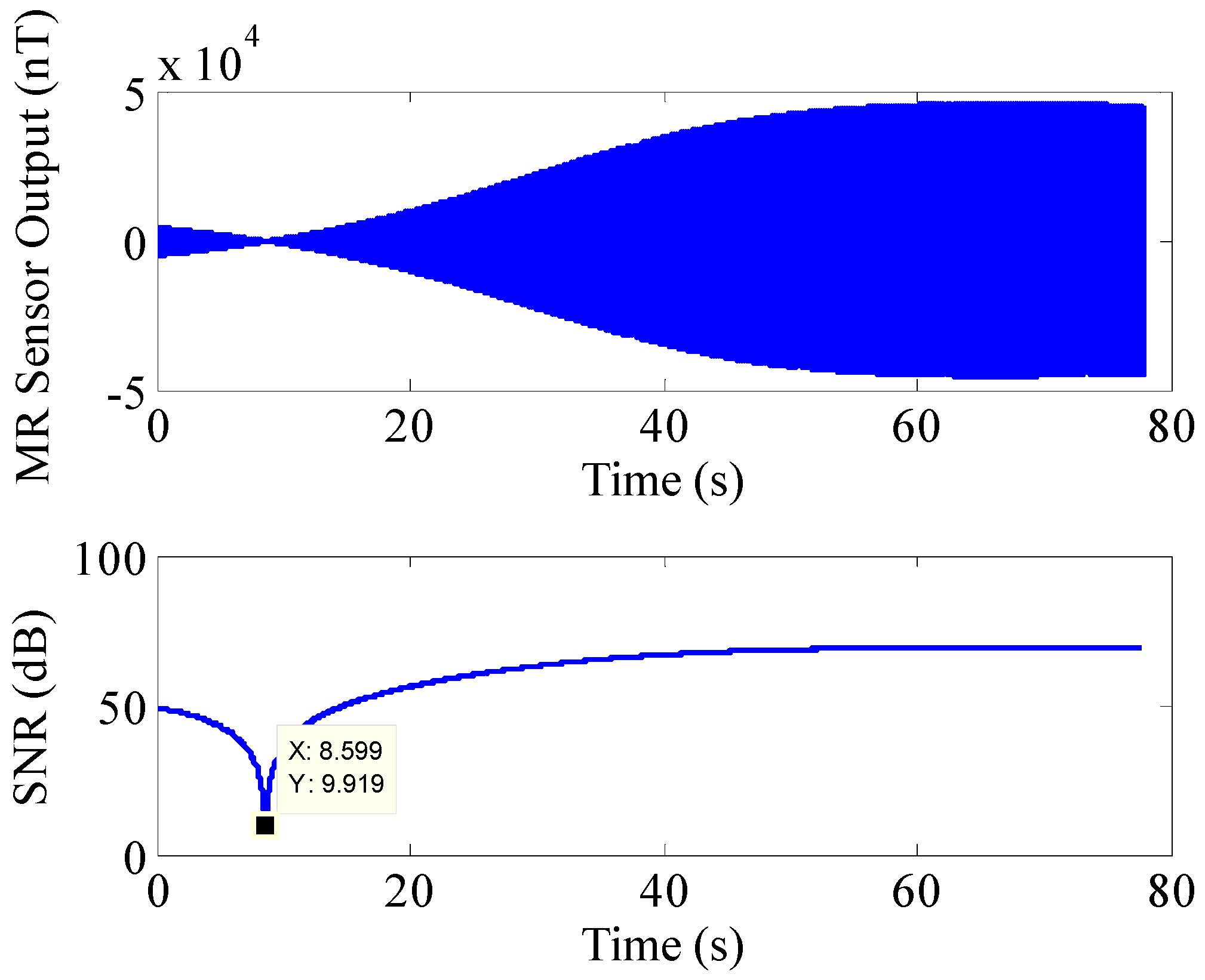
3.3.3. SNR
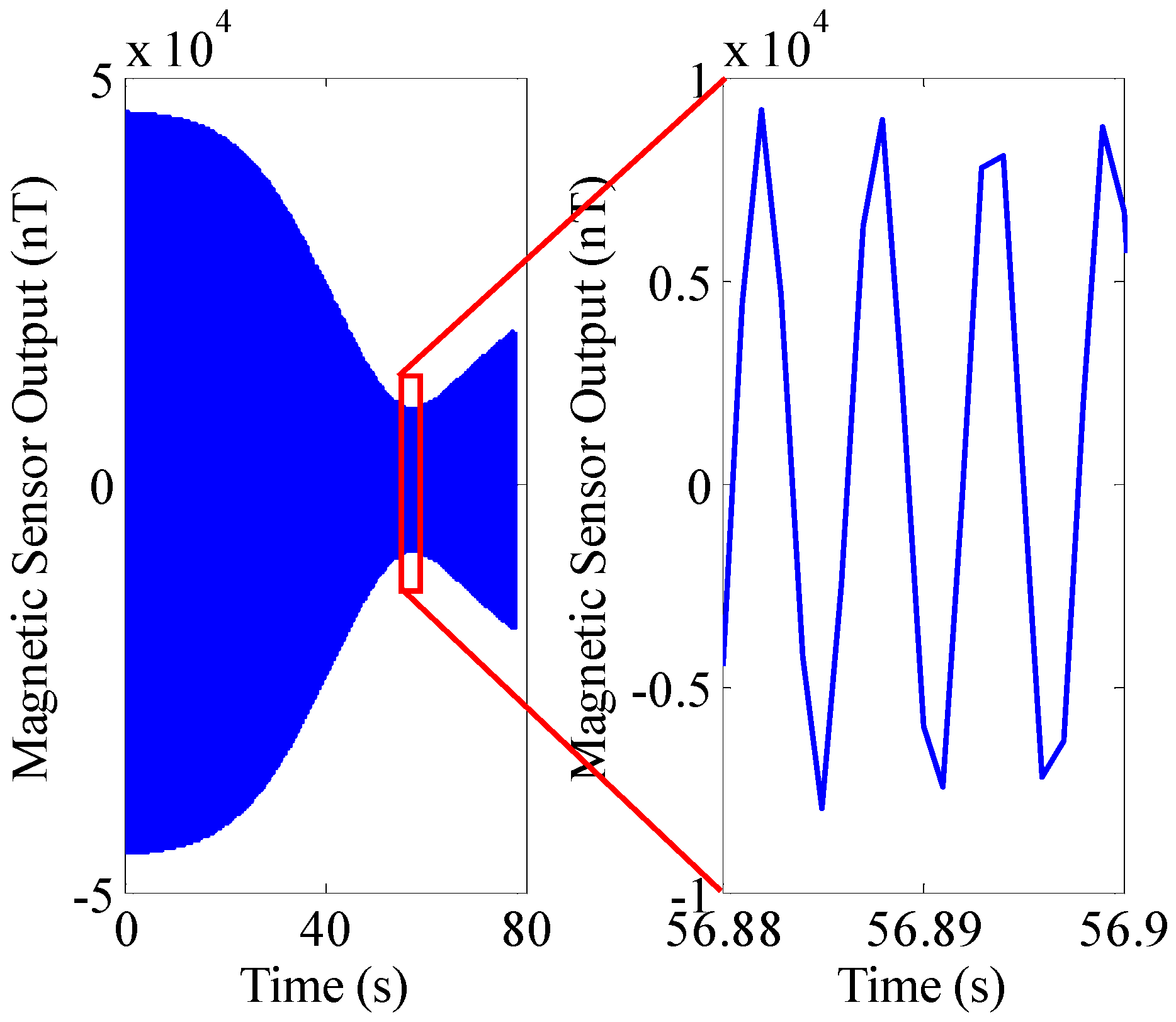
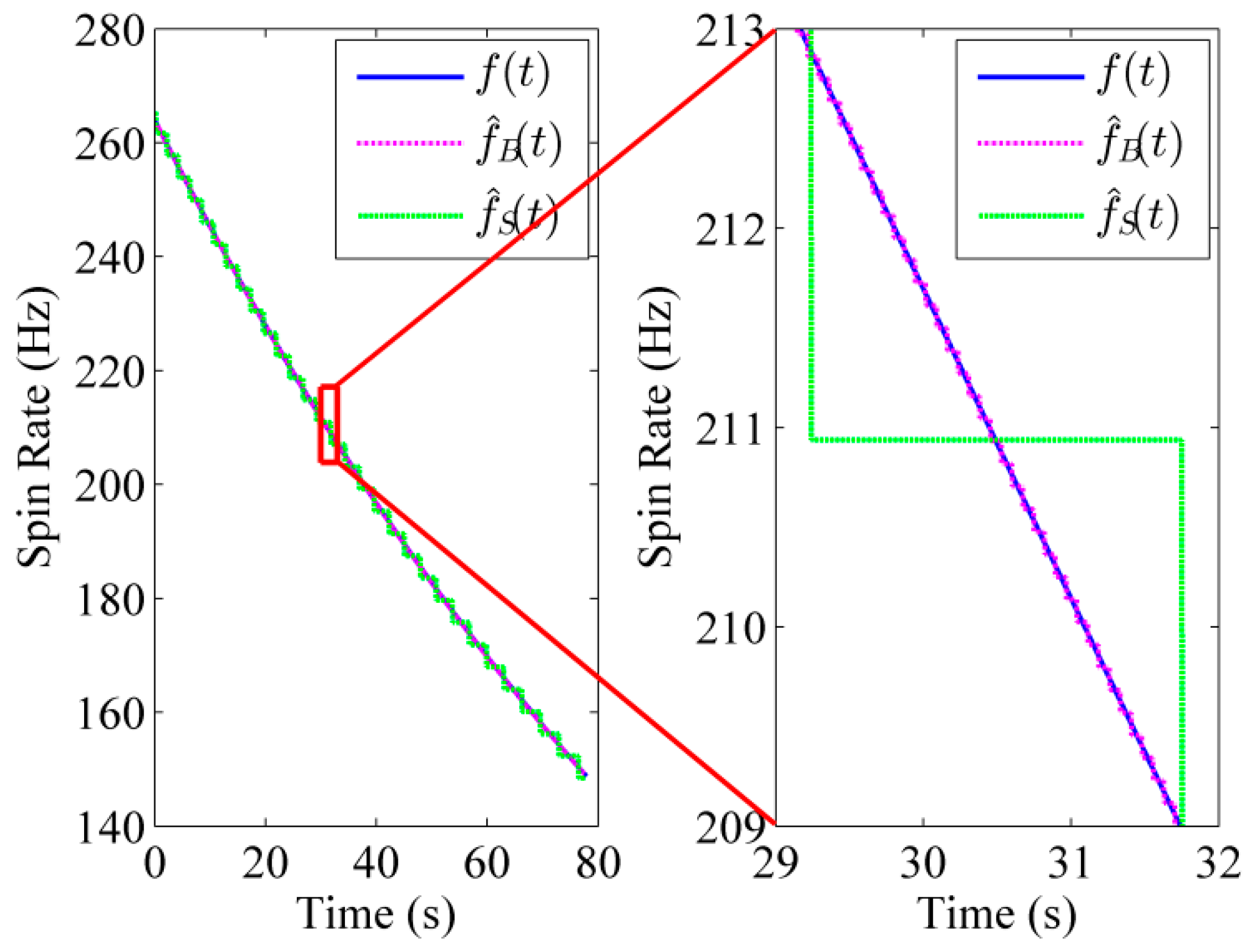
4. Projectile Spin Rate Estimation
4.1. MR Sensor and Its Mathematical Model
4.2. Results and Discussion
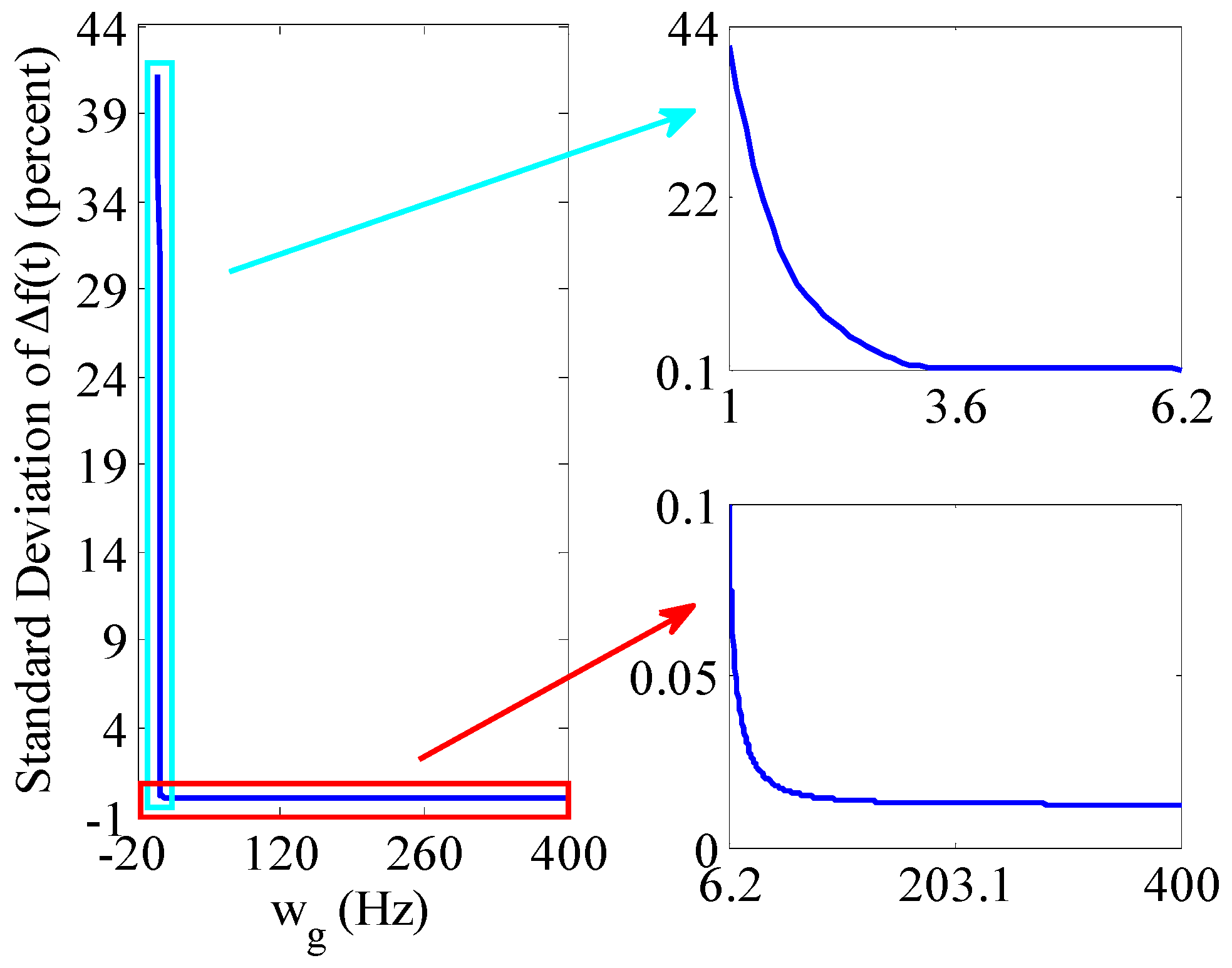
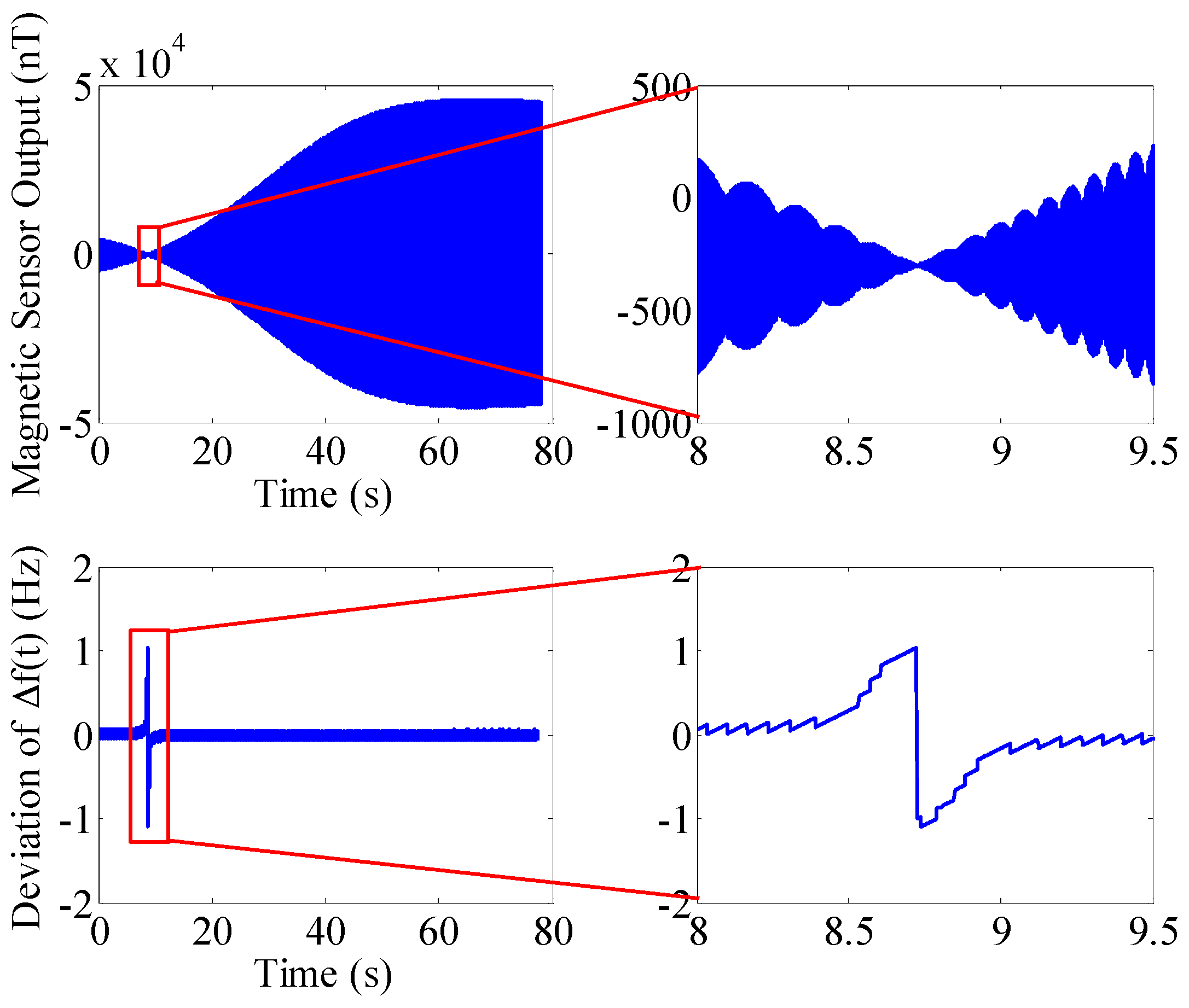
4.3. The Impact of the Launch Rotational Angular Velocity of the Projectile on Spin Rate Accuracy Extracted by the BCZT
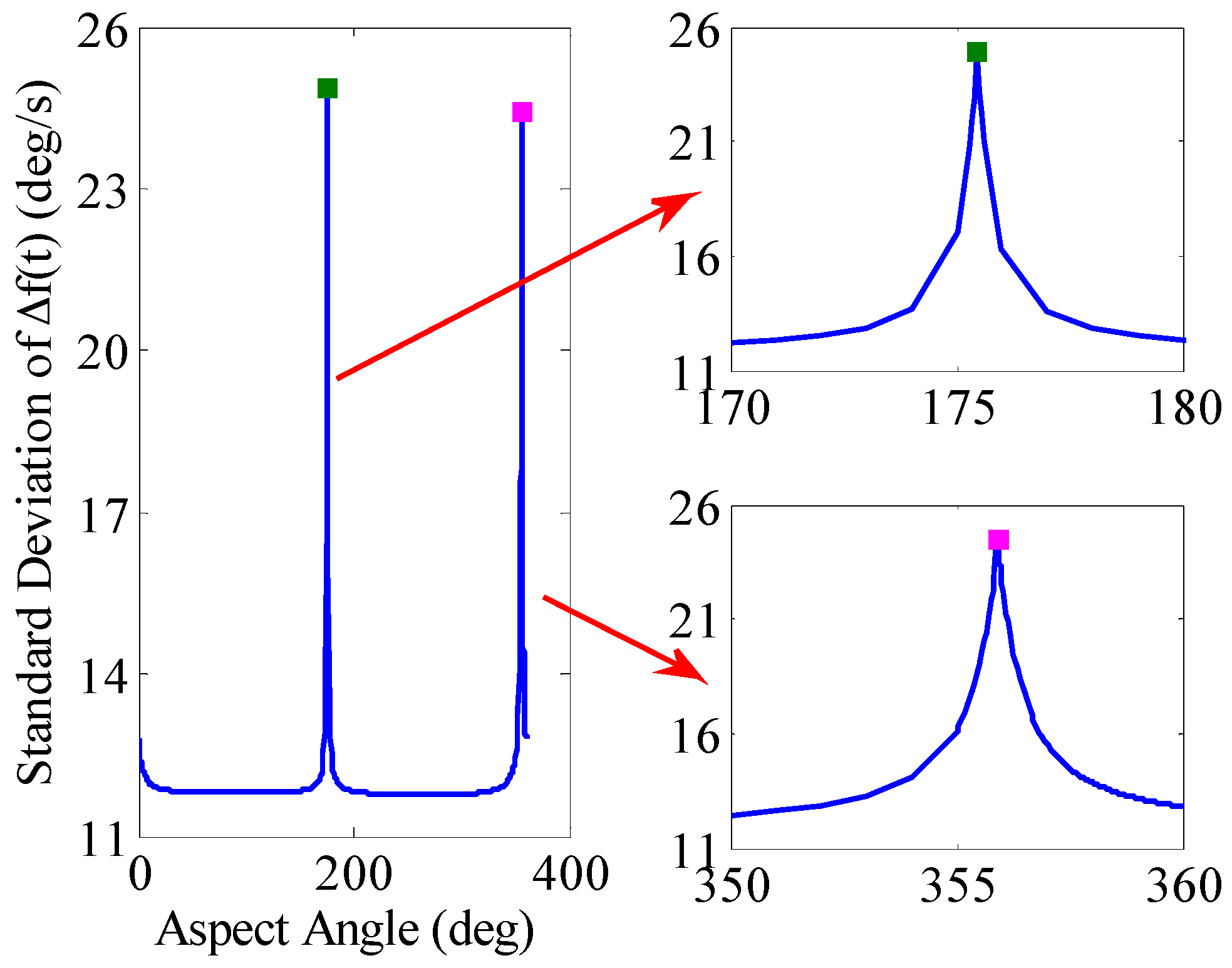
4.4. The Impact of the Aspect Angle of the Projectile on Spin Rate Accuracy Extracted by the BCZT
5. Conclusions
- (1)
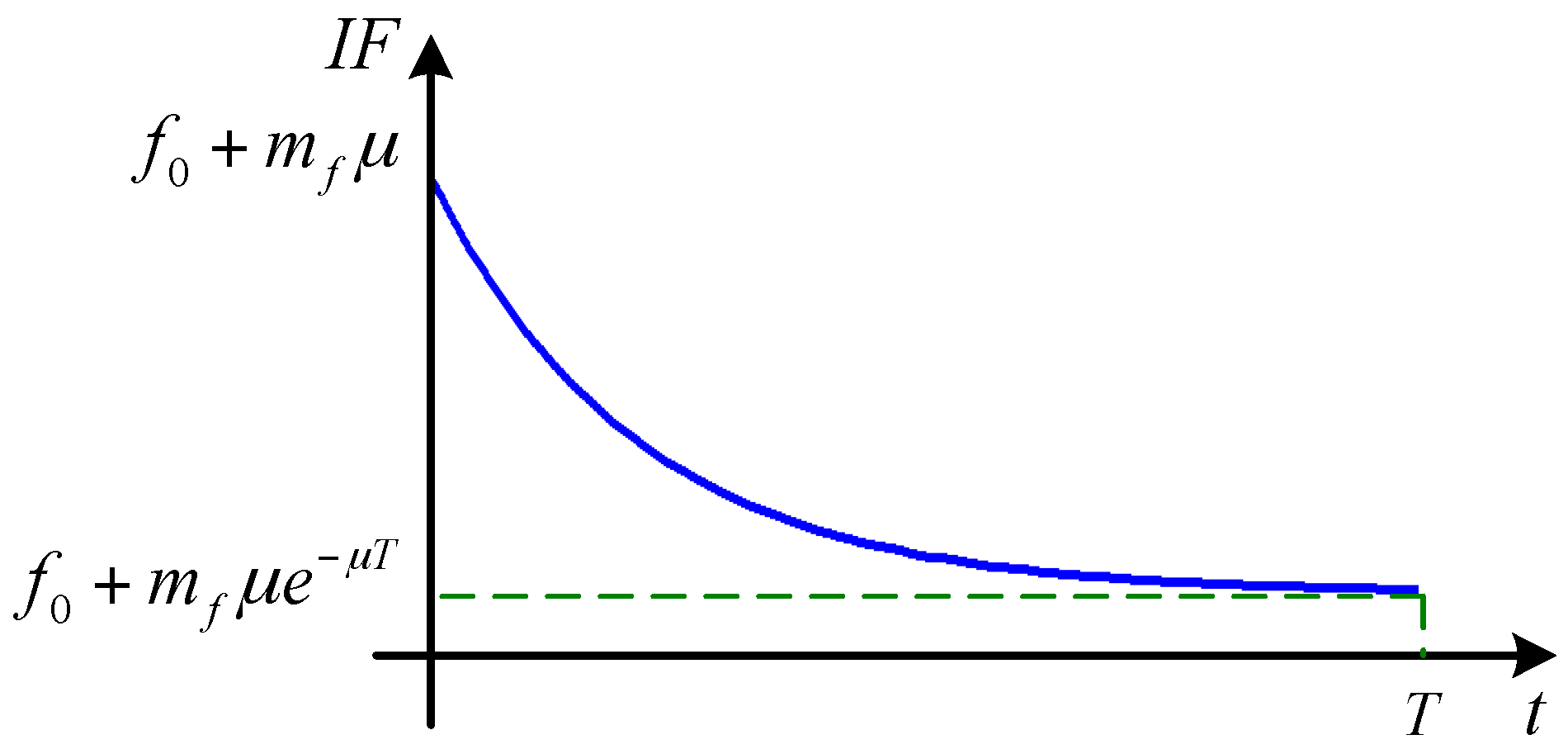
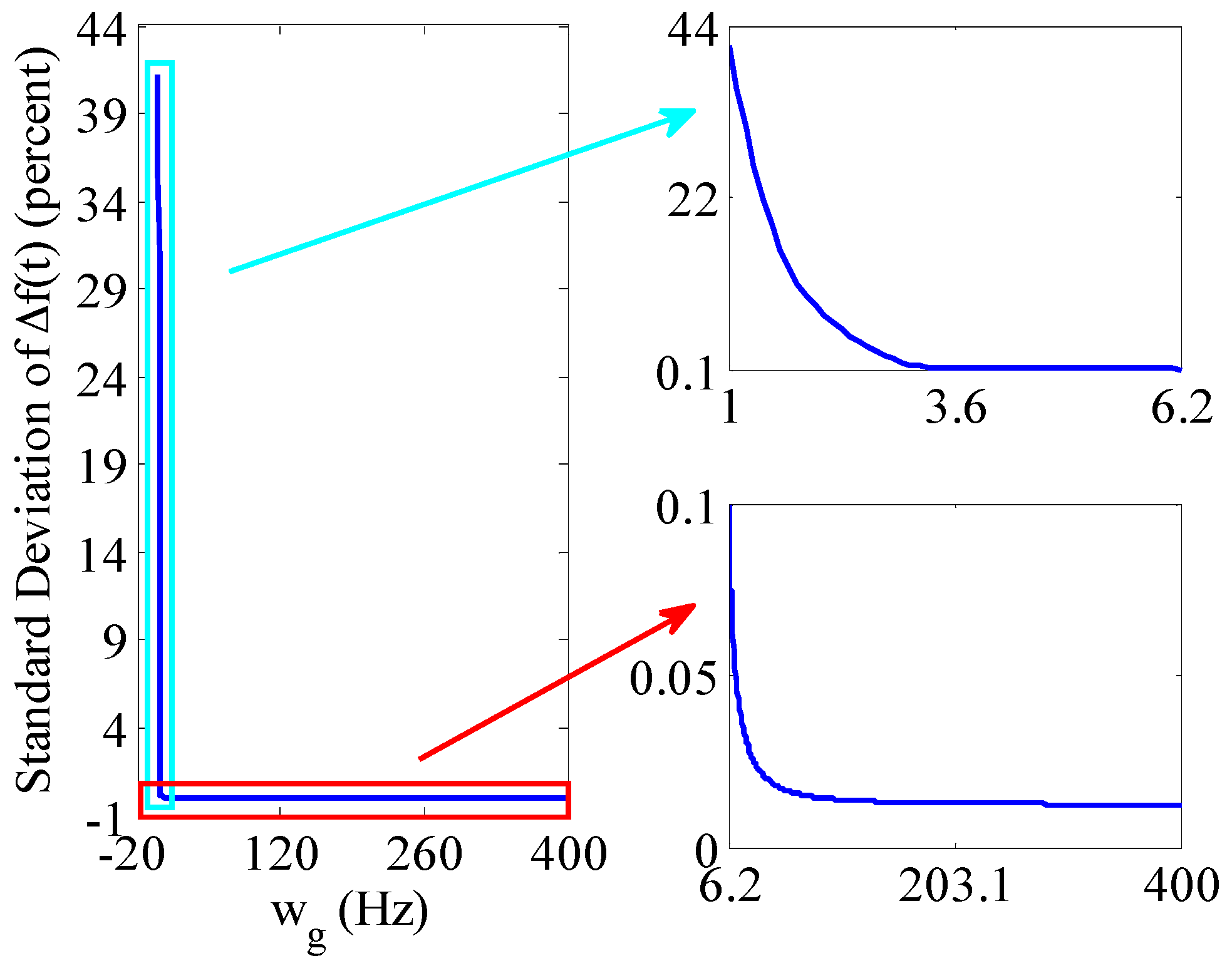
- To obtain the establishment conditions of the spin rate measurement principle of the spinning projectile based on geomagnetic information, the launch rotational angular velocity of the projectile should be high enough, and the higher it is, the smaller the deviation of the spin rate measurement is.
- (2)
- The corresponding time position tM[j] of the frequency fM[j] extracted by the BCZT within the measurement window should be determined according to the actual situation. When extracting the signal frequency, the impact that the position of tM[j] in the measurement window has on the accuracy of the BCZT TF domain analysis method can be pre-analyzed in order to determine the best time position.
- (3)
- To define the impact of the measurement window width on the BCZT accuracy, the wider the measurement window is, the higher BCZT accuracy is, but a bigger time domain deviation occurs, so the measurement window width should be selected based on the specific application. When the real-time performance requirement is low, the measurement window width should be appropriately widened to increase the frequency resolution; if real-time performance is highly required, the measurement window width should be as short as possible, but not less than three periods.
- (4)
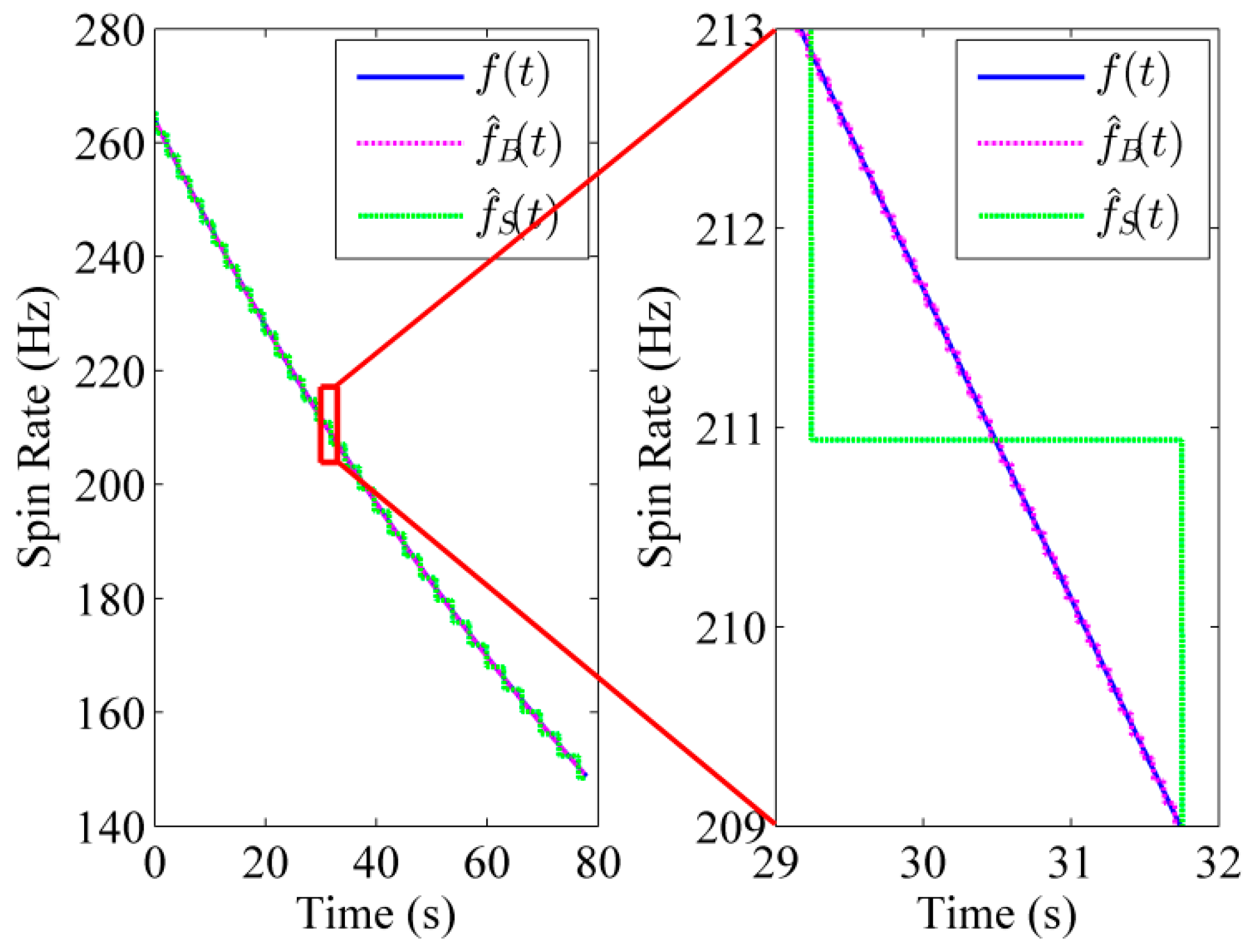
- Utilizing the BCZT to extract the projectile spin rate is more reliable, even when the projectile is launched in a magnetic blind area. The spin rate deviation increases instantly in a very short period during its flight, then the deviation decreases rapidly and remains stable.
Author Contributions
Conflicts of Interest
Appendix A
- (1)
- Calculate the inherent noise of the HMC1043
- (2)
- Estimate the SNR range of the MR sensor output
References
- Ilg, M.D. Guidance, Navigation and Control for Munitions. Ph.D. Thesis, Drexel University, Philadelphia, PA, USA, 2008. [Google Scholar]
- Harkins, T.; Davis, B.; Hepner, D. Novel on-board sensor systems for making angular measurements on spinning projectiles. In Proceedings of the SPIE, Acquisition, Tracking, and Pointing XV, Orlando, FL, USA, 16 April 2001; p. 4365.
- Sanz, R.; Fernández, A.B.; Dominguez, J.A.; Martín, B.; Michelena, M.D. Gamma irradiation of magnetoresistive sensors for planetary exploration. Sensors 2012, 12, 4447–4465. [Google Scholar] [CrossRef] [PubMed]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M.C. Recent Developments of Magnetoresistive Sensors for Industrial Applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef] [PubMed]
- Wilson, M.J. Attitude Determination with Magnetometers for Gun-Launched Munitions; U.S. Army Research Lab. Rept. ARL-TR-3209; Aberdeen Proving Ground: Aberdeen, MD, USA, 2004. [Google Scholar]
- Allik, B.; Ilg, M.; Zurakowski, R. Ballistic Roll Estimation using EKF Frequency Tracking and Adaptive Noise Cancellation. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2546–2553. [Google Scholar] [CrossRef]
- Davis, B.S.; Harkins, T.E.; Burke, L.W. Flight test results of miniature, low cost, spin, accelerometer, and yaw sensors. In Proceedings of the 35th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–10 January 1997.
- Harkins, T.E. Understanding Body-Fixed Sensor Output from Projectile Flight Experiments; U.S. Army Research Lab. Rept. ARL-TR-3029; Aberdeen Proving Ground: Aberdeen, MD, USA, September 2003. [Google Scholar]
- Harkins, T.E. On the Viability of Magnetometer-Based Projectile Orientation Measurements; U.S. Army Research Lab. Rept. ARL-TR-4310; Aberdeen Proving Ground: Aberdeen, MD, USA, November 2007. [Google Scholar]
- Harkins, T.E.; Wilson, M.J. Measuring In-Flight Angular Motion with a Low-Cost Magnetometer; U.S. Army Research Lab. Rept. ARL-TR-4244; Aberdeen Proving Ground: Aberdeen, MD, USA, September 2007. [Google Scholar]
- Harkins, T.; Davis, B.; Brown, G.; Fresconi, F.; Hathaway, W.; Hathaway, A.; Lovas, A. New Means for Observing and Characterizing Projectile Dynamics in Free-Flight Experiments. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; pp. 74911–74921.
- Byun, Y.S.; Jeong, R.G.; Kang, S.W. Vehicle Position Estimation Based on Magnetic Markers: Enhanced Accuracy by Compensation of Time Delays. Sensors 2015, 15, 28807–28825. [Google Scholar] [CrossRef] [PubMed]
- Markevicius, V.; Navikas, D.; Zilys, M.; Andriukaitis, D.; Valinevicius, A.; Cepenas, M. Dynamic Vehicle Detection via the Use of Magnetic Field Sensors. Sensors 2016, 16, 78. [Google Scholar] [CrossRef] [PubMed]
- Begović, M.M.; Durić, P.M.; Dunlop, S.; Phadke, A.G. Frequency Tracking in Power Networks in the Presence of Harmonics. IEEE Trans. Power. Deliv. 1993, 8, 480–485. [Google Scholar] [CrossRef]
- Nam, S.R.; Kang, S.H.; Kang, S.H. Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method. Energies 2015, 8, 79–93. [Google Scholar] [CrossRef]
- Djurić, M.B.; Djurišić, Ž.R. Frequency measurement of distorted signals using Fourier and zero crossing techniques. Electr. Power Syst. Res. 2008, 78, 1407–1415. [Google Scholar] [CrossRef]
- Rabiner, L.R.; Schafer, R.W.; Rader, C.M. The Chirp z-Transform Algorithm. IEEE Trans. Audio Electroacoust 1969, 17, 86–92. [Google Scholar] [CrossRef]
- Nawab, S.H.; Quatieri, T.F.; Lim, J.S. Signal Reconstruction from Short-Time Fourier Transform Magnitude. IEEE Trans. Acoust. Speech Sign. Process 1983, 31, 986–998. [Google Scholar] [CrossRef]
- Gustafsson, F. Rotational speed sensors: Limitations, Pre-processing and Automotive Applications. IEEE Instrum. Meas. Mag. 2010, 13, 16–23. [Google Scholar] [CrossRef]
- Treutler, C.P.O. Magnetic sensors for automotive applications. Sens. Actuators A Phys. 2001, 91, 2–6. [Google Scholar] [CrossRef]
- Lenssen, K.M.H.; Adelerhof, D.J.; Gassen, H.J.; Kuiper, A.E.T.; Somers, G.H.J.; van Zon, J.B.A.D. Robust giant magnetoresistance sensors. Sens. Actuators A Phys. 2000, 85, 1–8. [Google Scholar] [CrossRef]
- Giebeler, C.; Adelerhof, D.J.; Kuiper, A.E.T.; van Zon, J.B.A.; Oelgeschläger, D.; Schulz, G. Robust GMR sensors for angle detection and rotation speed sensing. Sens. Actuators A Phys. 2001, 91, 16–20. [Google Scholar] [CrossRef]
- Rieger, G.; Ludwig, K.; Hauch, J.; Clemens, W. GMR sensors for contactless position detection. Sens. Actuators A Phys. 2001, 91, 7–11. [Google Scholar] [CrossRef]
- Sorli, B.; Vena, A.; Belaizi, Y.; Balde, M. UHF RFID anisotropic magnetoresistance sensor for human motion monitoring. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, Italy, 11–14 May 2015; pp. 1165–1168.
- Lee, H.; Kim, K.; Park, H.; Park, C.G.; Lee, J.G. Roll Estimation of a Smart Munition Using a Magnetometer Based on an Unscented Kalman Filter. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; pp. 74601–74613.
- Wang, Y.S. Half-Experiential Formulas for Calculating Decreasing Angular Velocity of Projectile in Trajectory. J. Detect. Ctrl. 2003, 25, 1–6. [Google Scholar]
- Honeywell International Inc. 3-Axis Magnetic Sensor HMC1043. Available online: www.honeywell.com/magneticsensors (accessed on 15 June 2006).
- Zhang, X.M.; Chen, G.B.; Li, J.; Liu, J. Calibration of triaxial MEMS vector field measurement system. IET Sci. Meas. Technol. 2014, 8, 601–609. [Google Scholar]
- Bickel, S.H. Small signal compensation of magnetic fields resulting from aircraft maneuvers. IEEE Trans. Aerosp. Electron. Syst. 1979, 15, 518–525. [Google Scholar] [CrossRef]
- Wang, P.; Gao, J.; Wang, Z. Time-frequency analysis of seismic data using synchrosqueezing transform. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2042–2044. [Google Scholar] [CrossRef]
- Rouger, P. Guidance and Control of Artillery Projectiles with Magnetic Sensors. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007; pp. 12031–12038.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Property | Specification | Physical Property | Specification |
|---|---|---|---|
| Mass, (kg) | 46.21 | Launch spin rate, (Hz) | 264 |
| Width, (m) | 0.85 | Sampling frequency, (Hz) | 1000 |
| Axial inertia, (kg·m2) | 0.1658 | Magnetic field strength, (nT) | 44,970 |
| Muzzle velocity, (m/s) | 820 | Declination, (degree) | −4.85 |
| Quadrant elevation, (degree) | 45 | Inclination, (degree) | 39.12 |
| Aspect angle, (degree) | 10 | Deviation of time domain, (s) | 1 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, J.; Deng, Z.; Fu, M.; Wang, S. A High-Spin Rate Measurement Method for Projectiles Using a Magnetoresistive Sensor Based on Time-Frequency Domain Analysis. Sensors 2016, 16, 894. https://doi.org/10.3390/s16060894
Shang J, Deng Z, Fu M, Wang S. A High-Spin Rate Measurement Method for Projectiles Using a Magnetoresistive Sensor Based on Time-Frequency Domain Analysis. Sensors. 2016; 16(6):894. https://doi.org/10.3390/s16060894
Chicago/Turabian StyleShang, Jianyu, Zhihong Deng, Mengyin Fu, and Shunting Wang. 2016. "A High-Spin Rate Measurement Method for Projectiles Using a Magnetoresistive Sensor Based on Time-Frequency Domain Analysis" Sensors 16, no. 6: 894. https://doi.org/10.3390/s16060894
APA StyleShang, J., Deng, Z., Fu, M., & Wang, S. (2016). A High-Spin Rate Measurement Method for Projectiles Using a Magnetoresistive Sensor Based on Time-Frequency Domain Analysis. Sensors, 16(6), 894. https://doi.org/10.3390/s16060894