
Overhauser Geomagnetic Sensor Based on the Dynamic Nuclear Polarization Effect for Magnetic Prospecting

 ,
,
Abstract
:1. Introduction
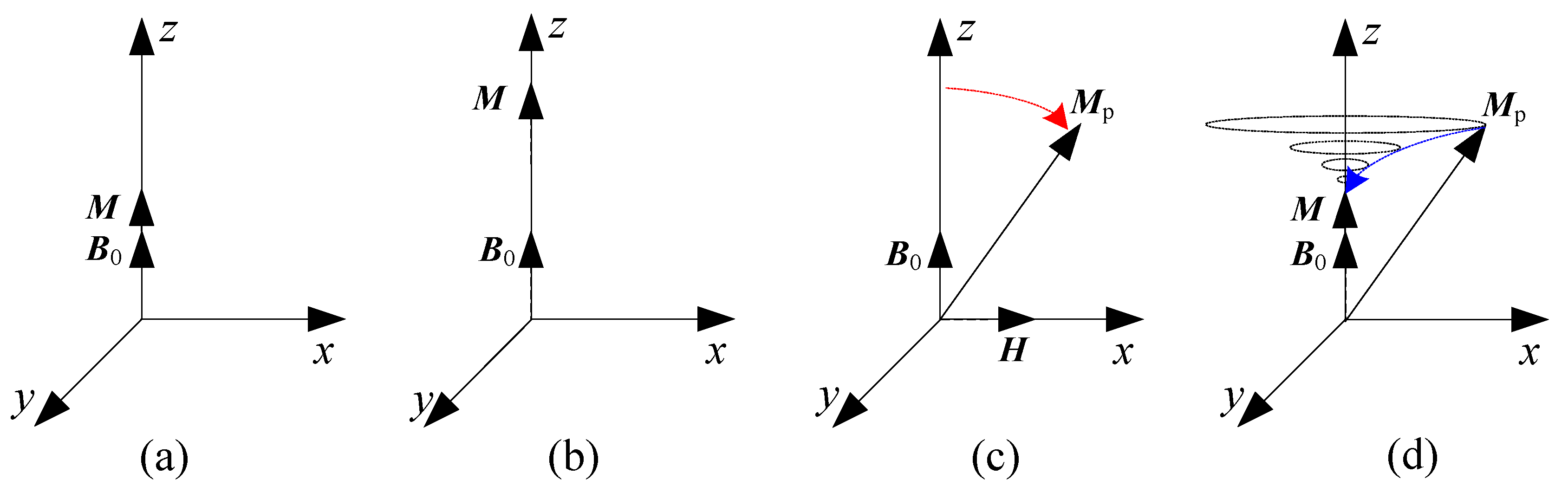
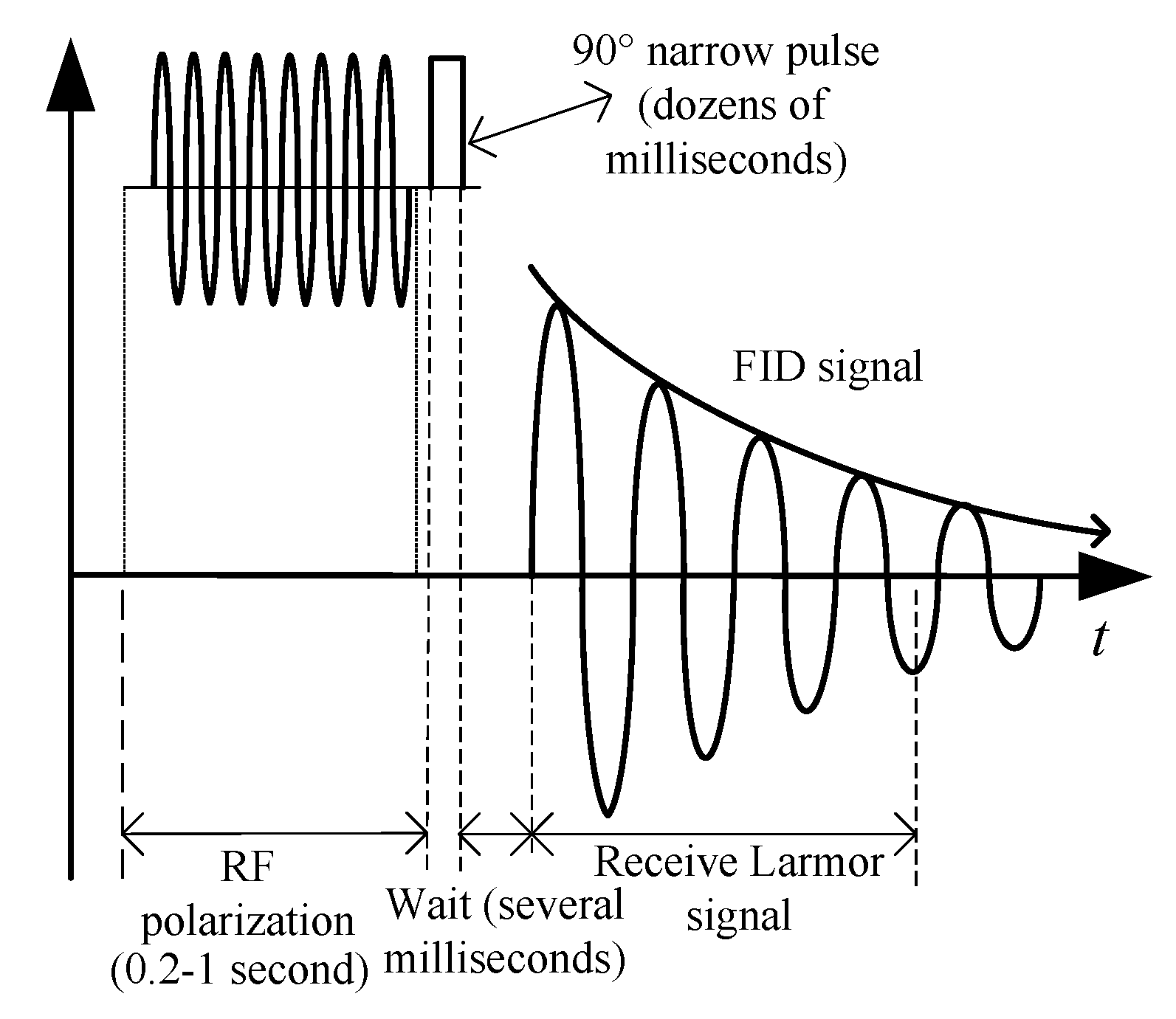
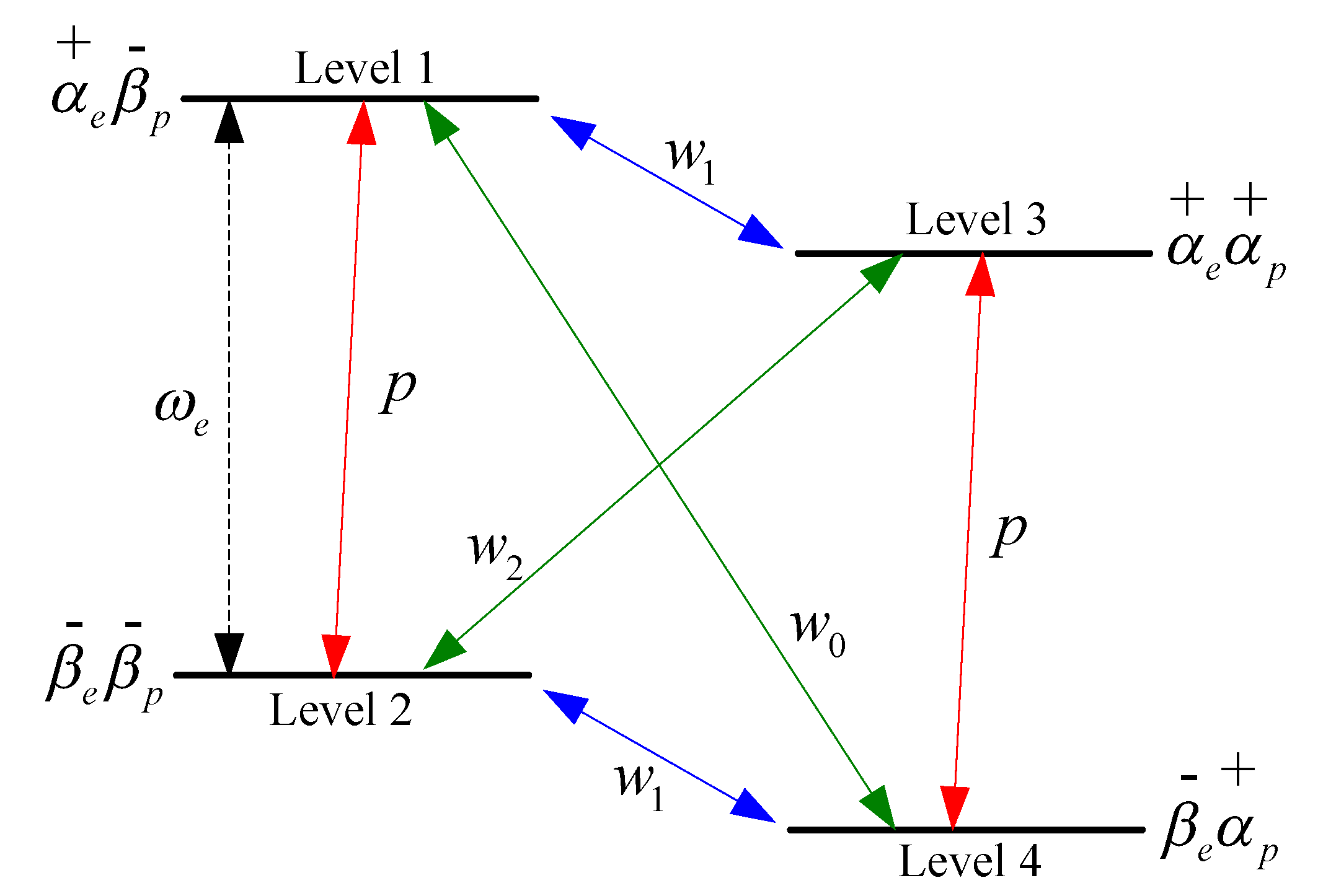
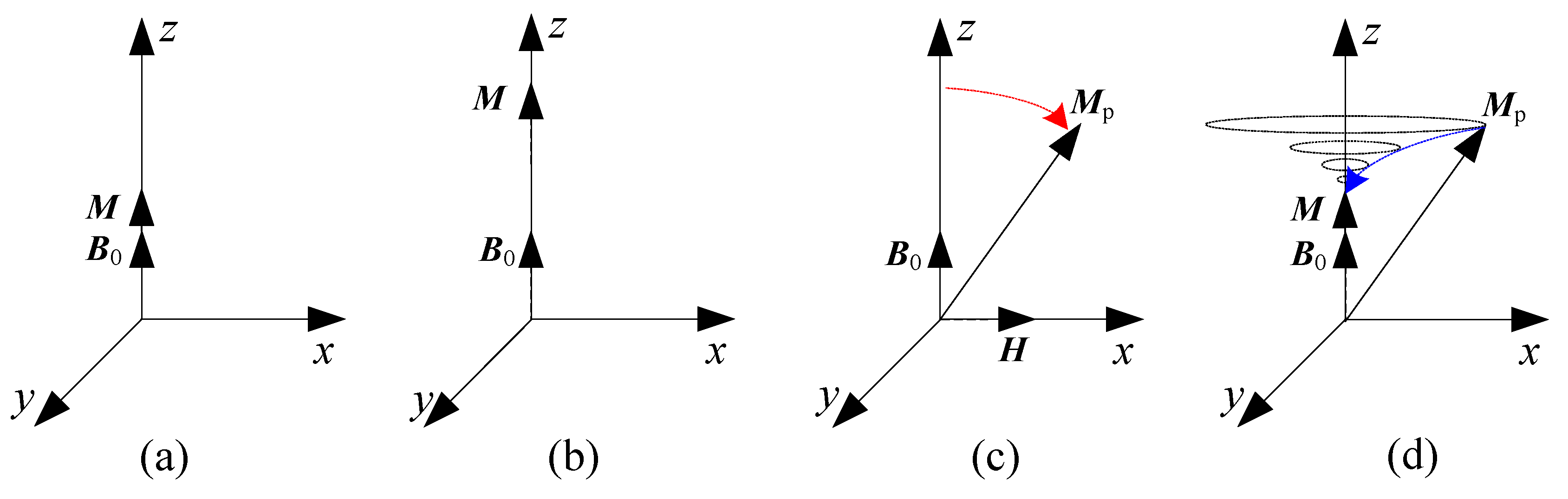
2. FID Signal Enhancement Method Based on the DNP Effect
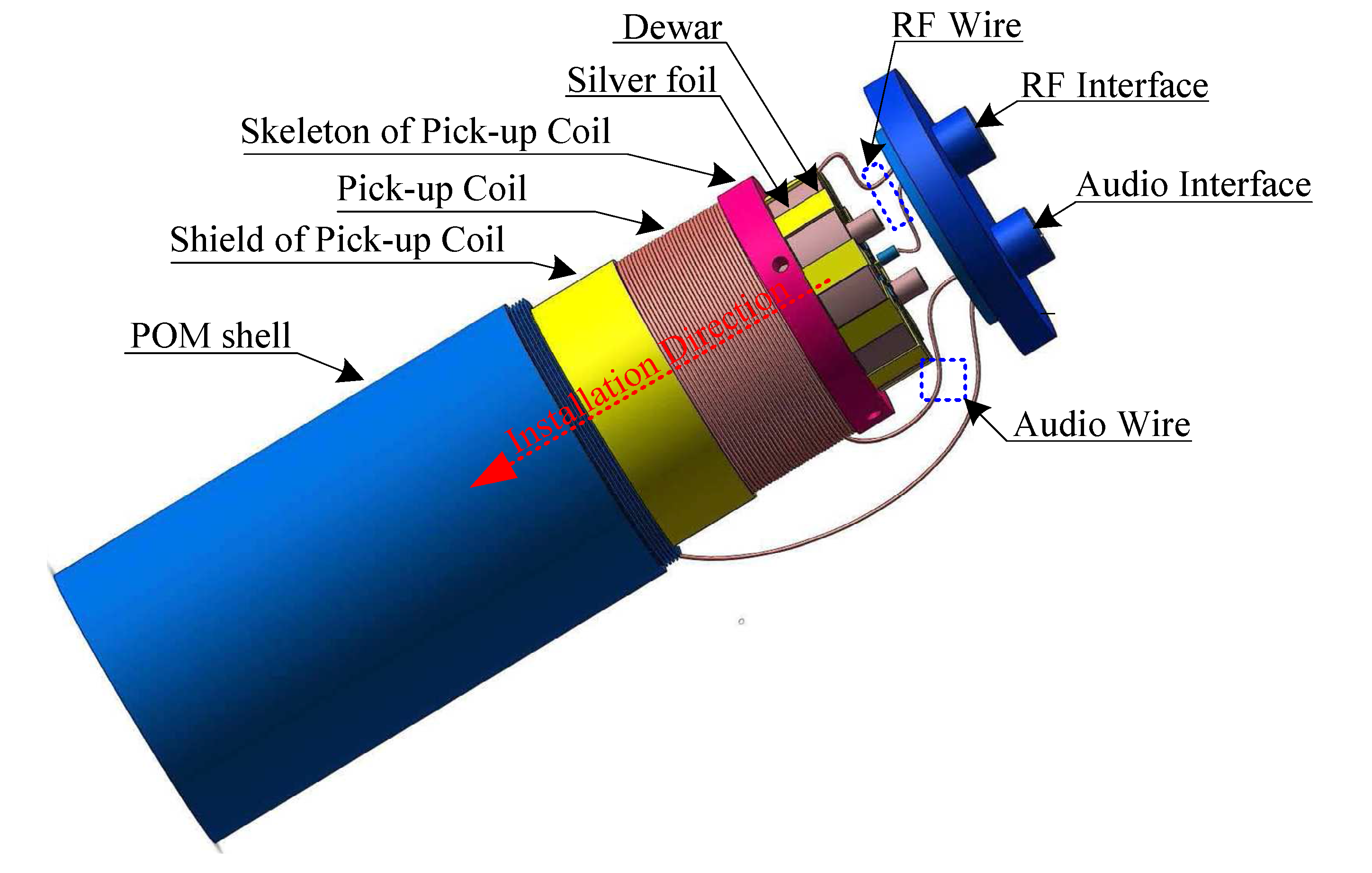
3. Design of the Overhauser Sensor
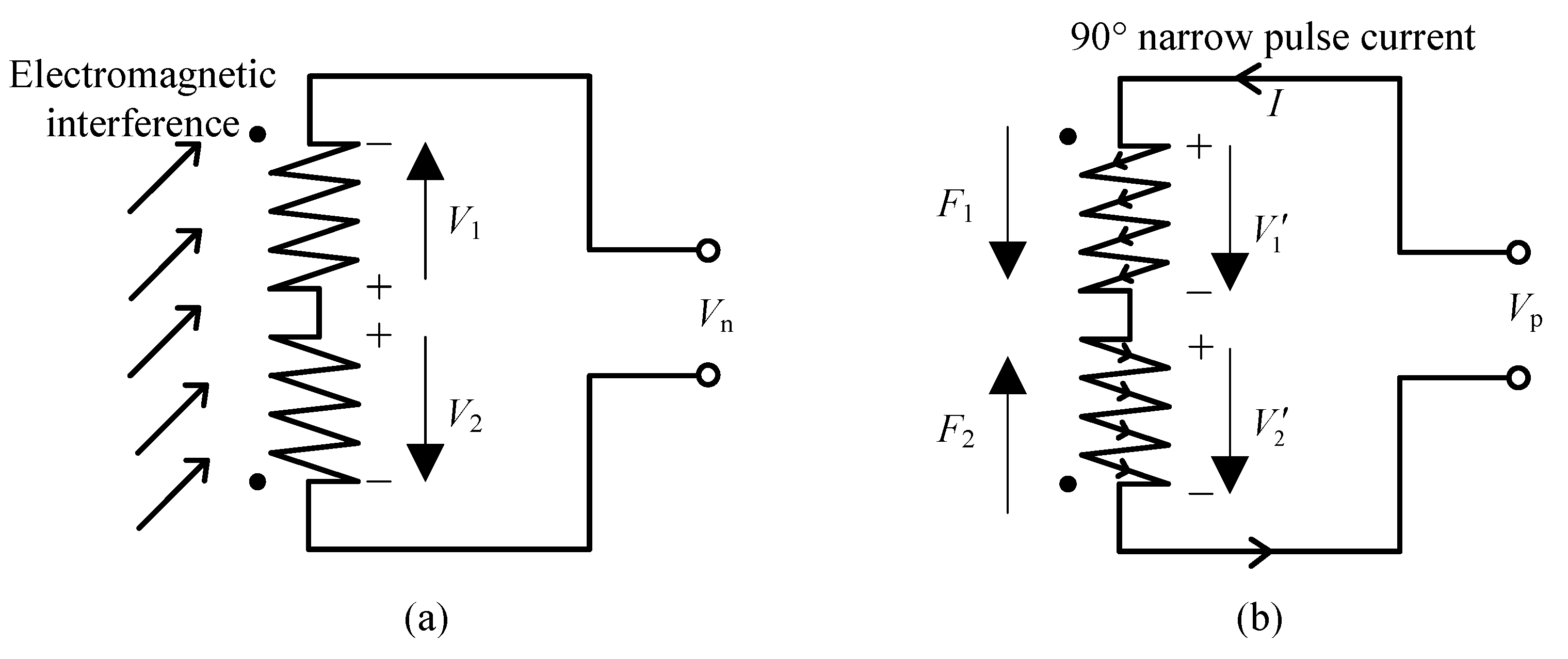
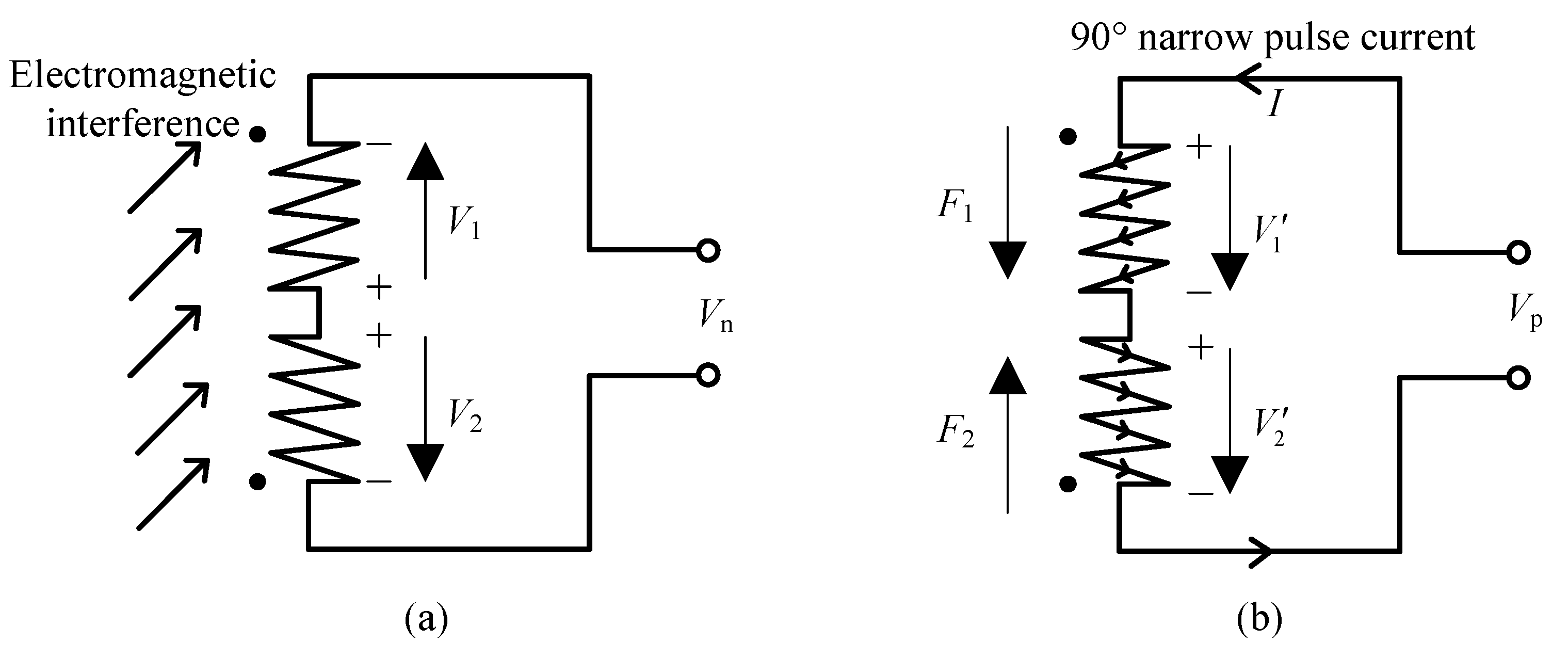
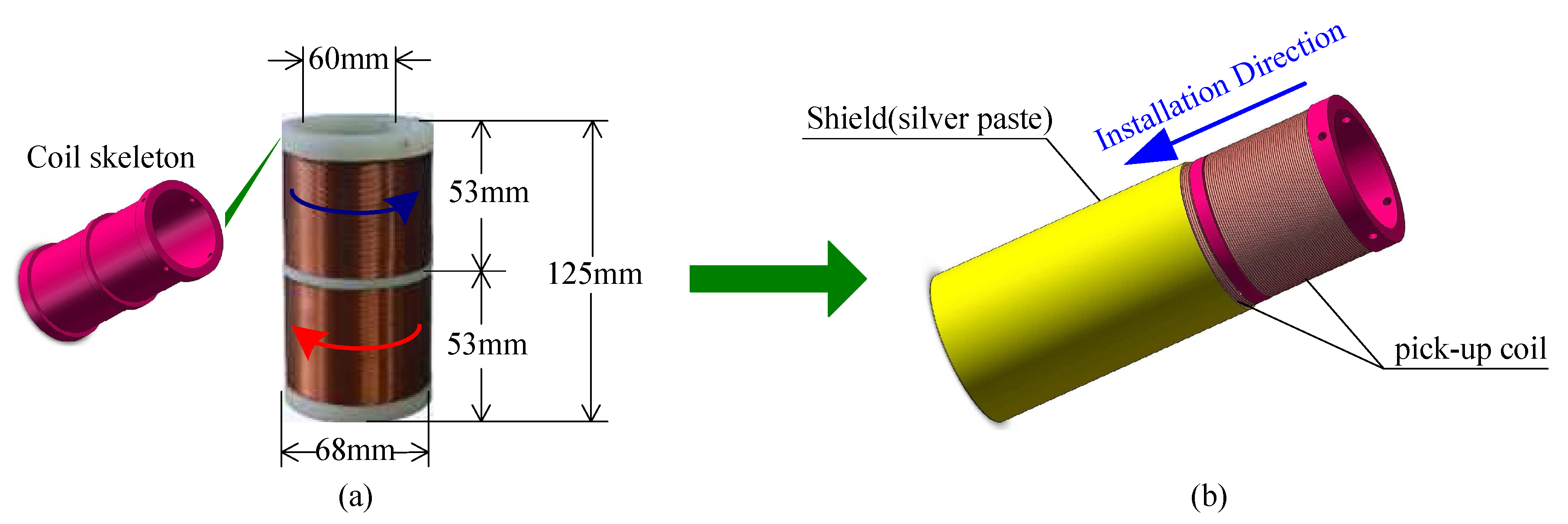
3.1. Design of Anti-Interference
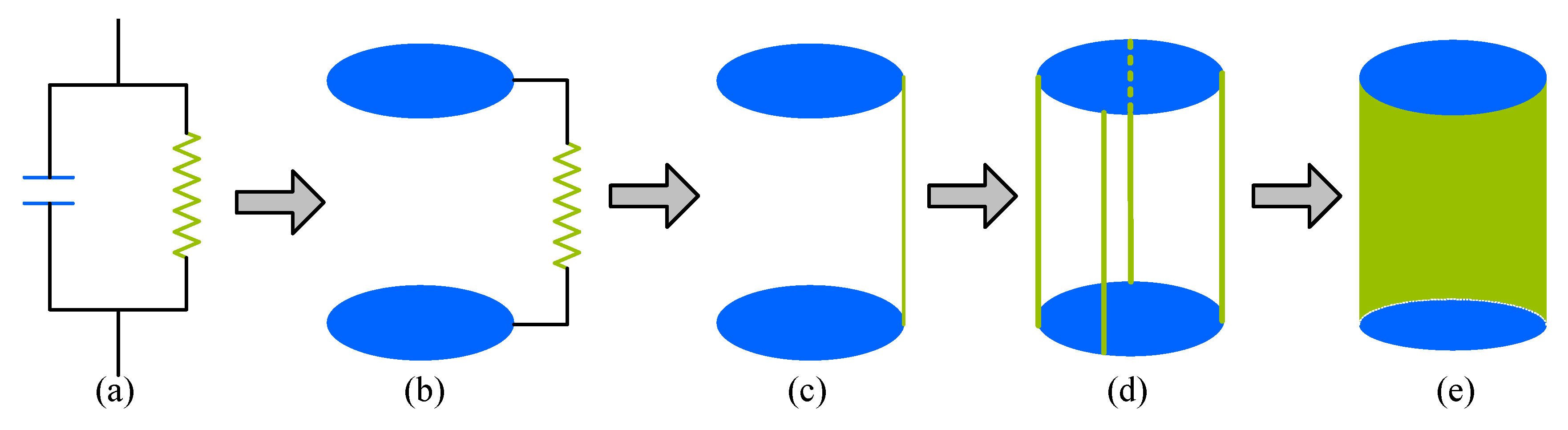
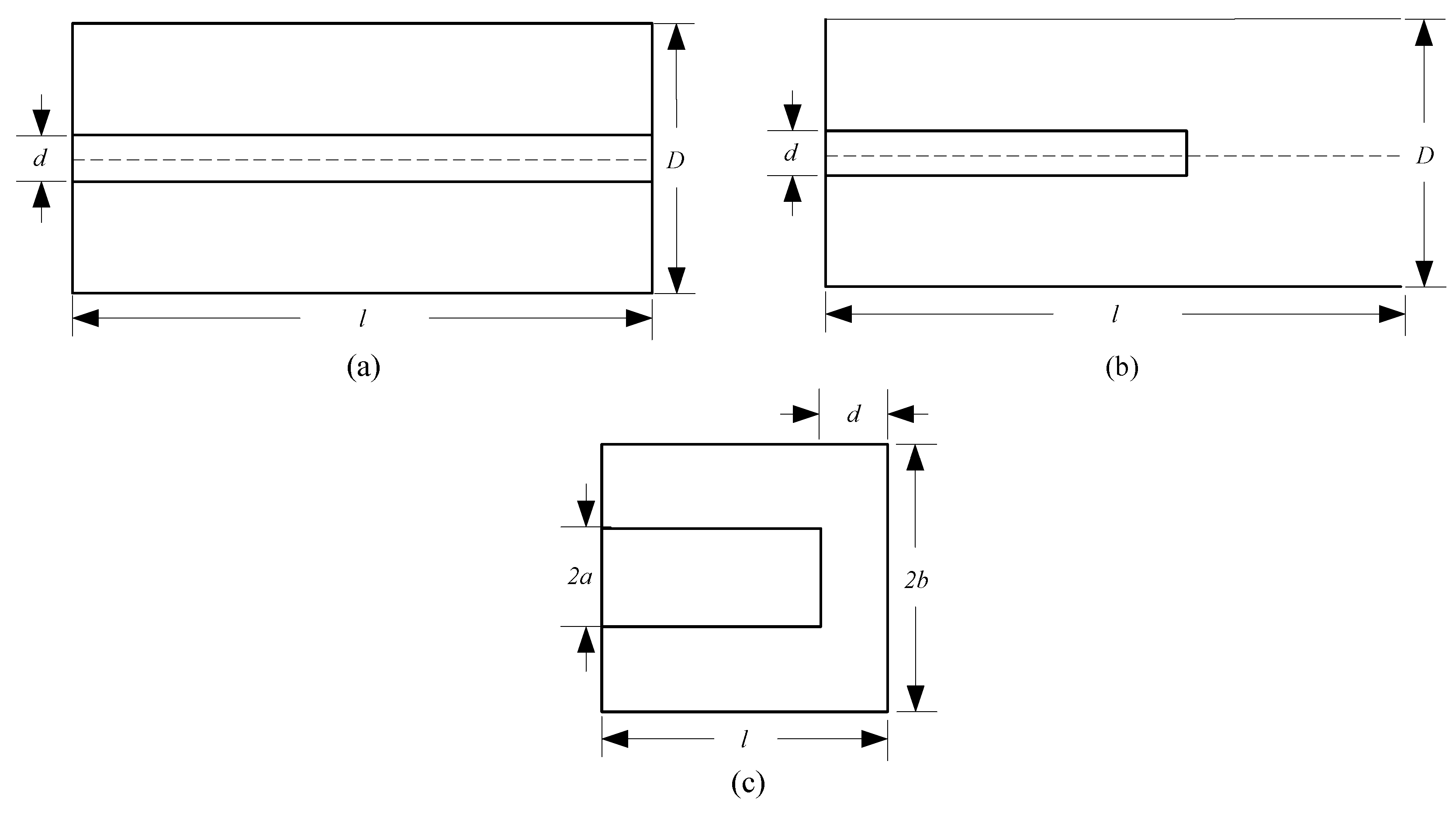
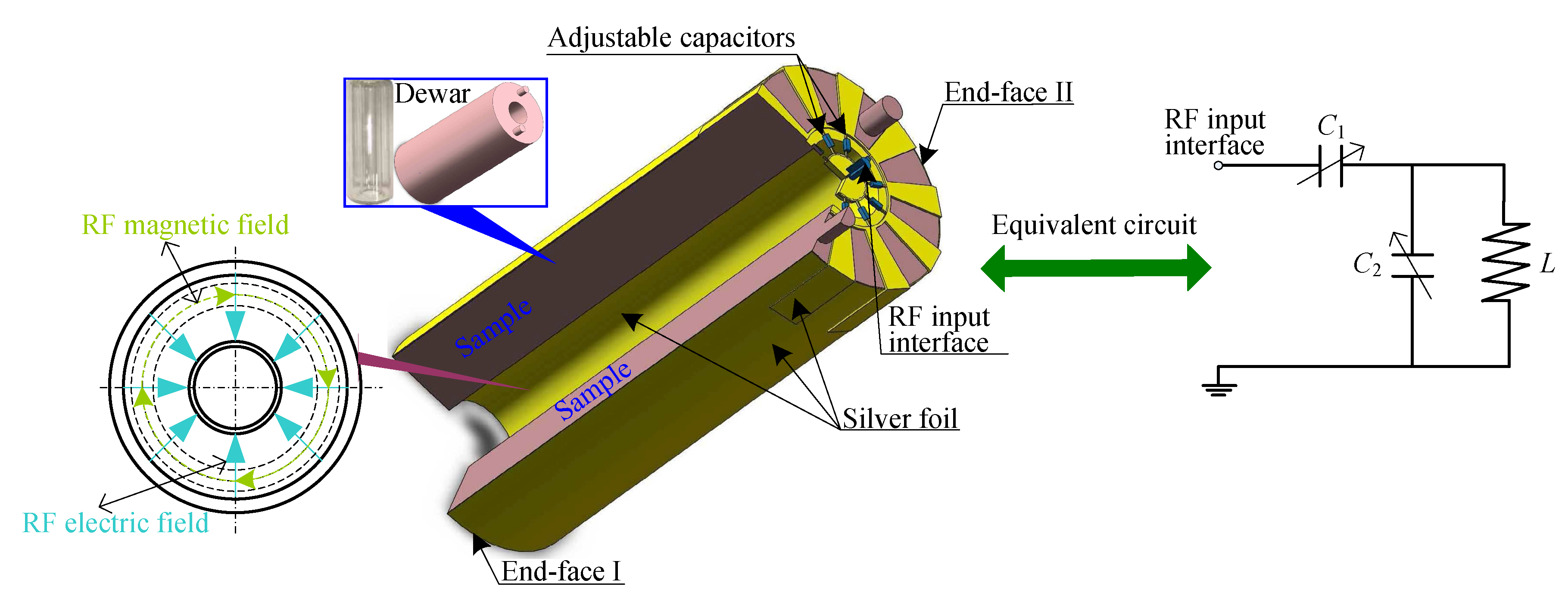
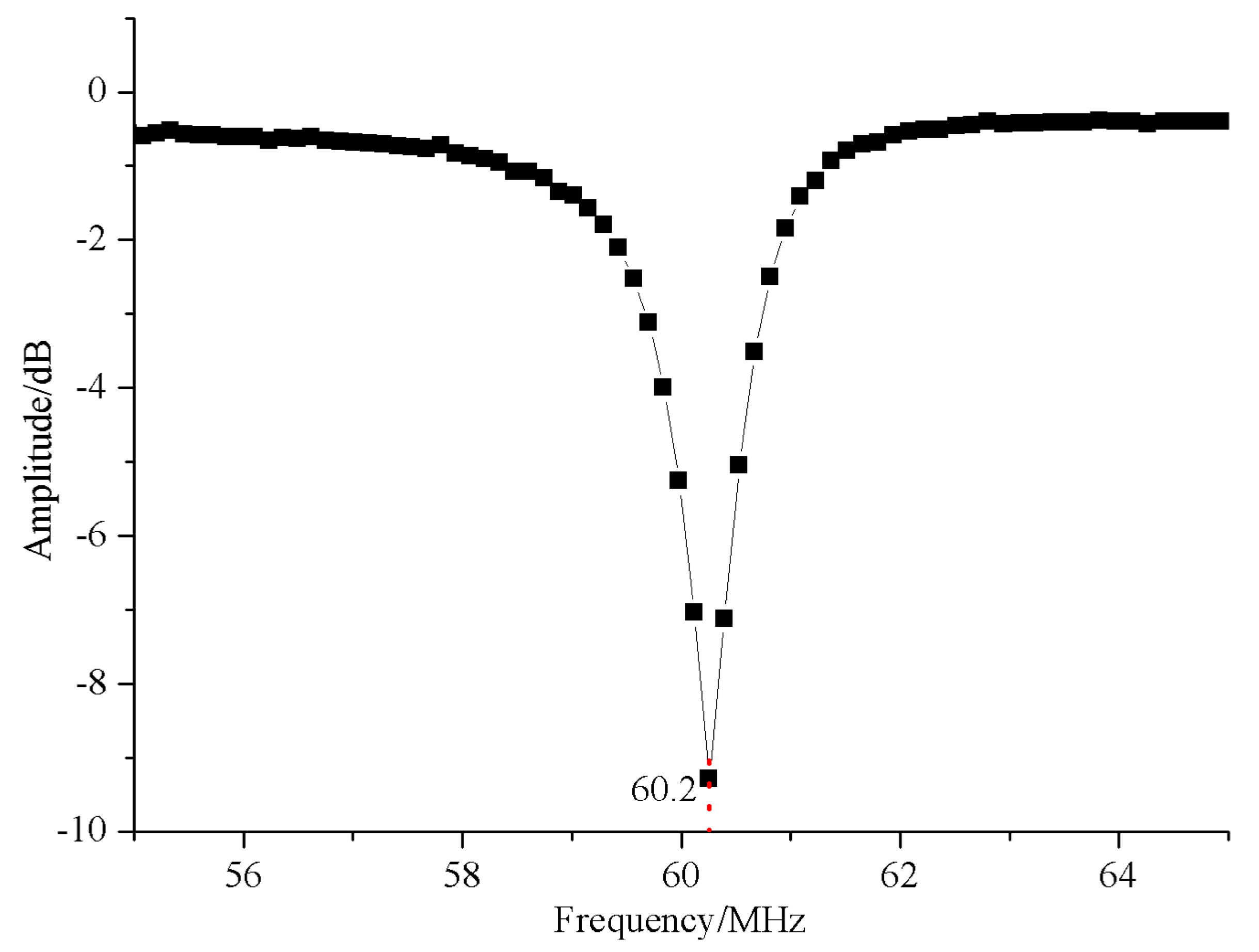
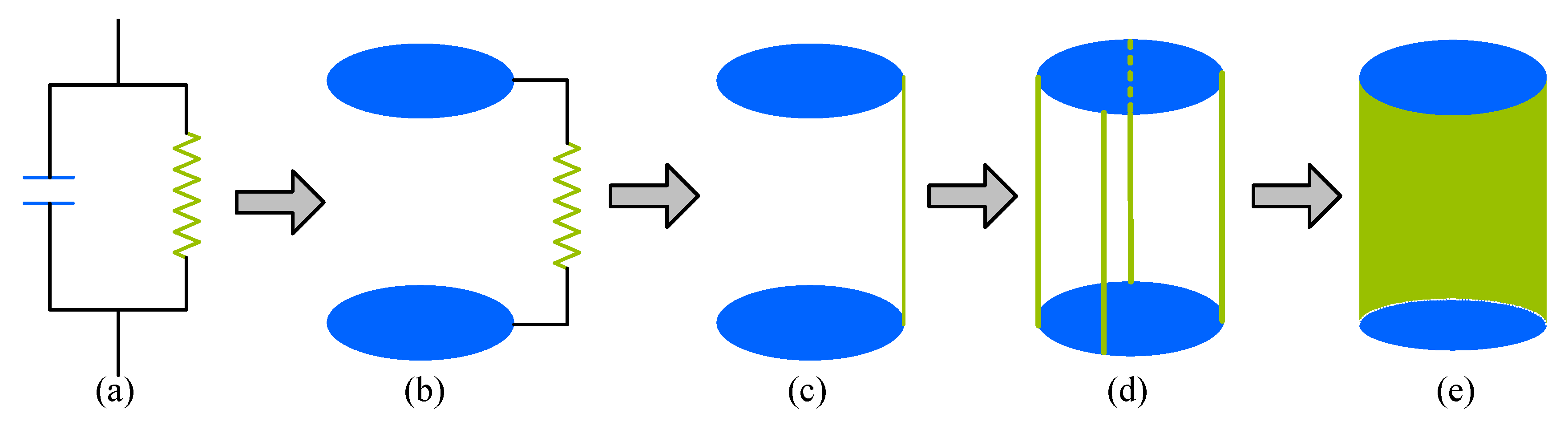
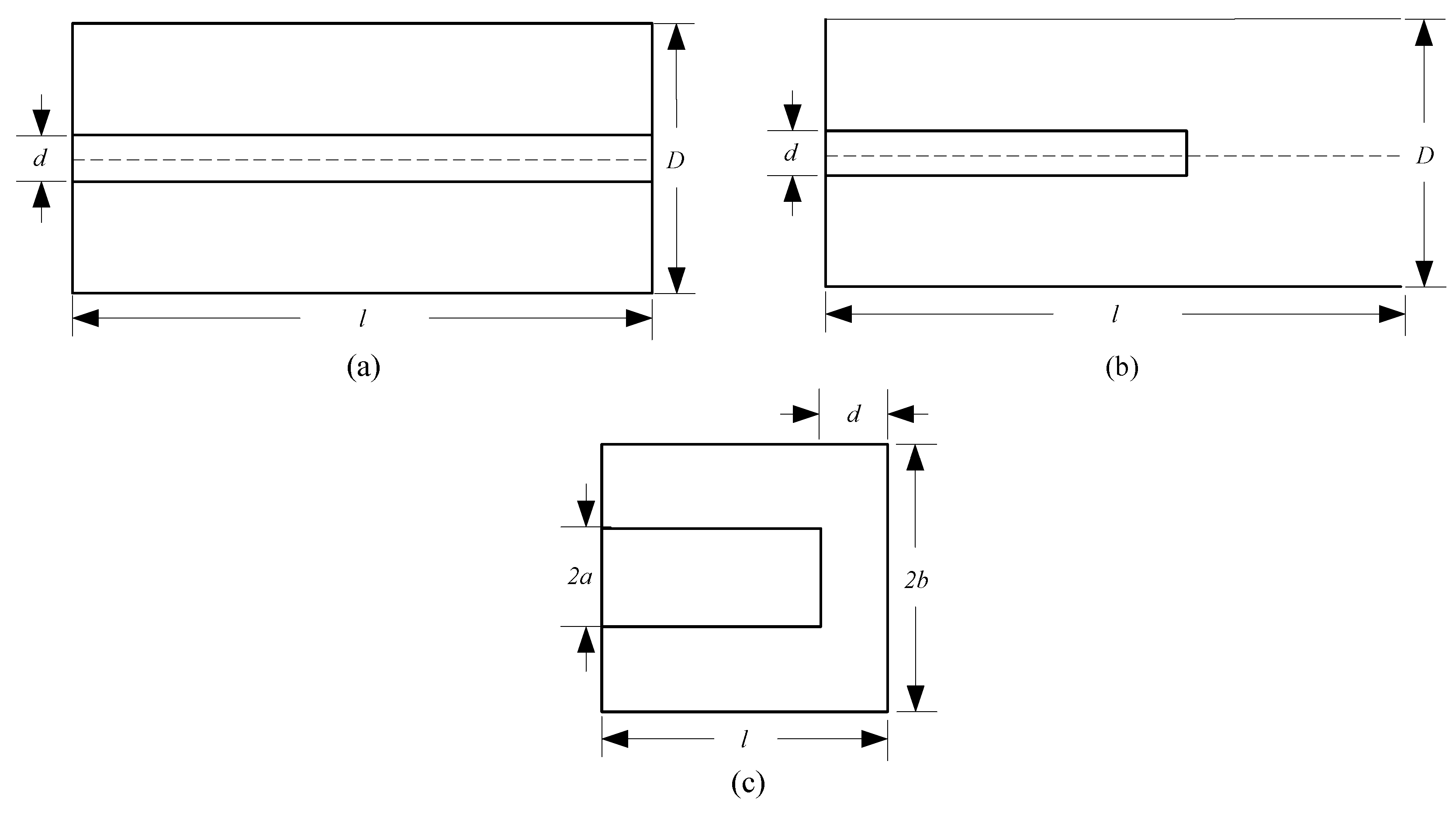
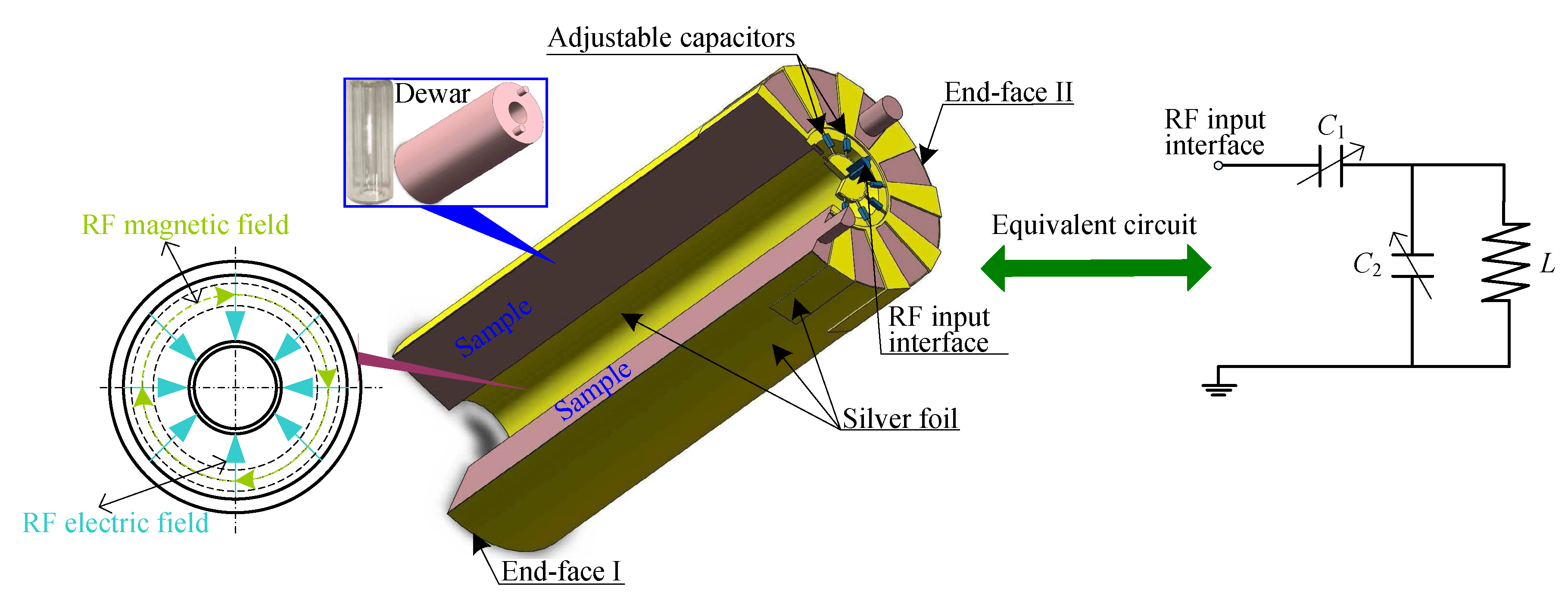
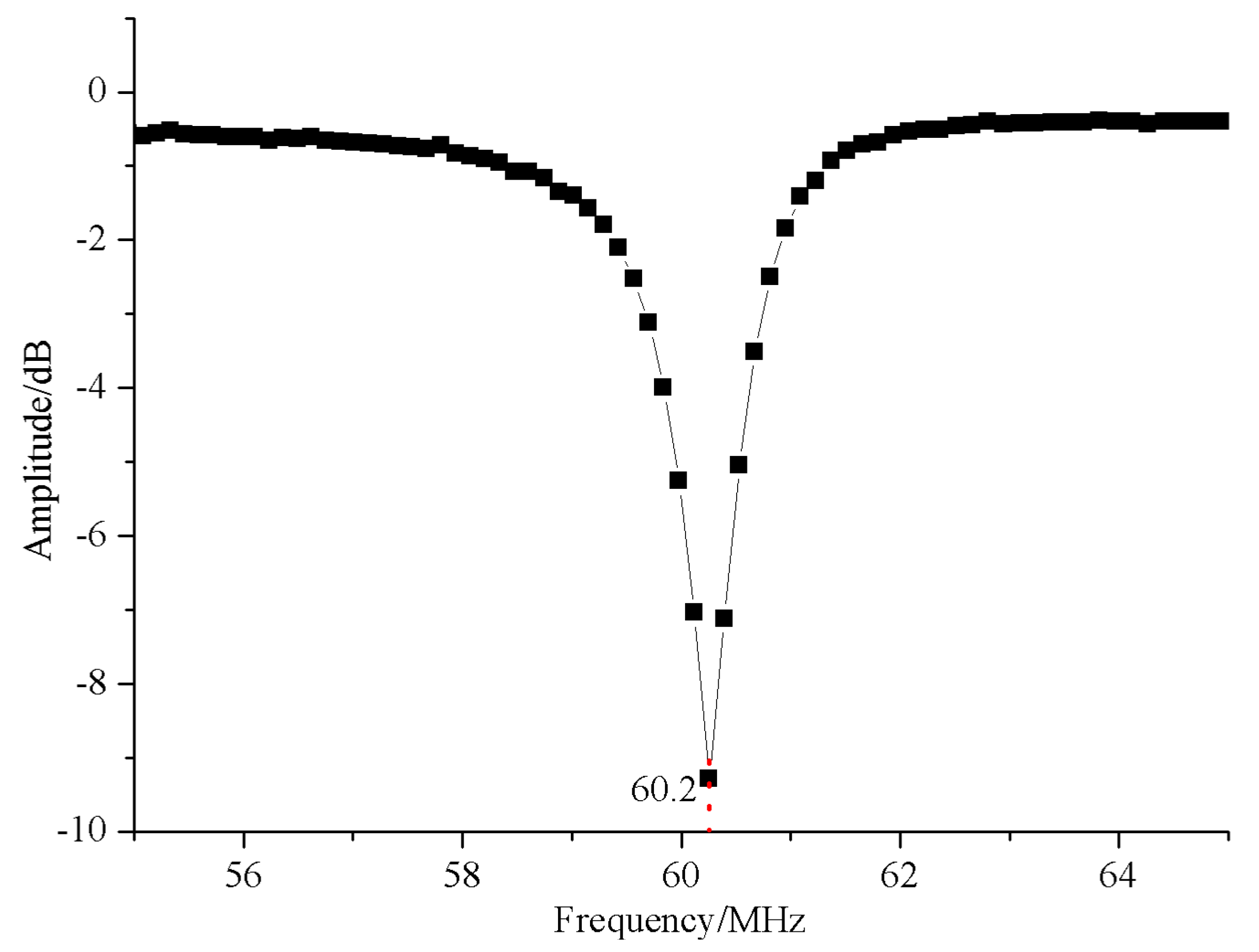
3.2. Design of Resonant Cavity
- (1)
- Compared to achieving low-frequency resonance, achieving high-frequency resonance requires the inductance and capacitance of the circuit to be reduced, which would rapidly decrease the component size and, moreover, reduce the capacity and mechanical strength of the resonant circuit.
- (2)
- The skin effect of electromagnetic waves would be intensified with the increase in frequency, and then, the ohmic, dielectric and radiation loss would increase significantly, leading to a considerable decrease in quality factor Q of the resonant circuit.
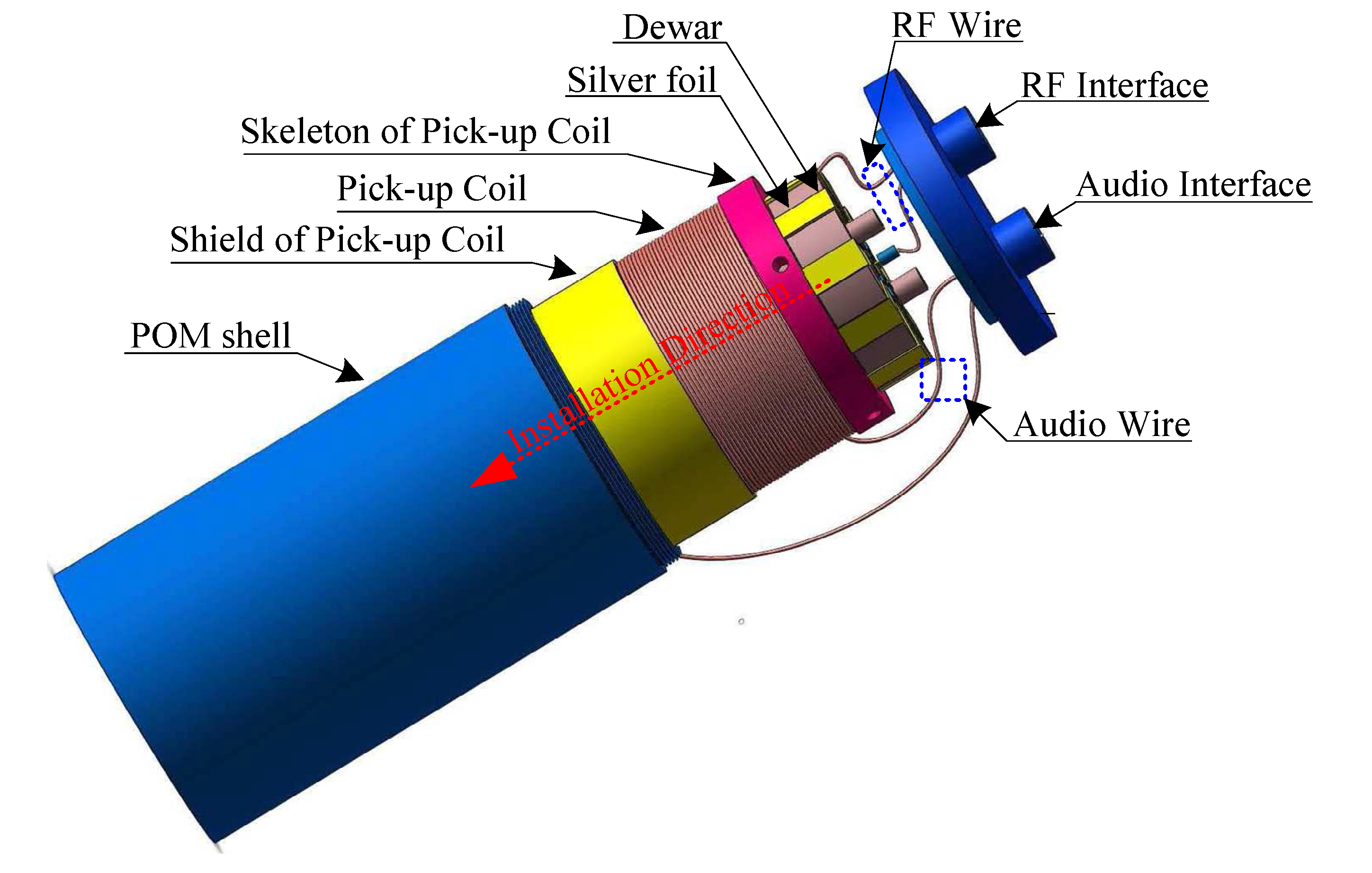
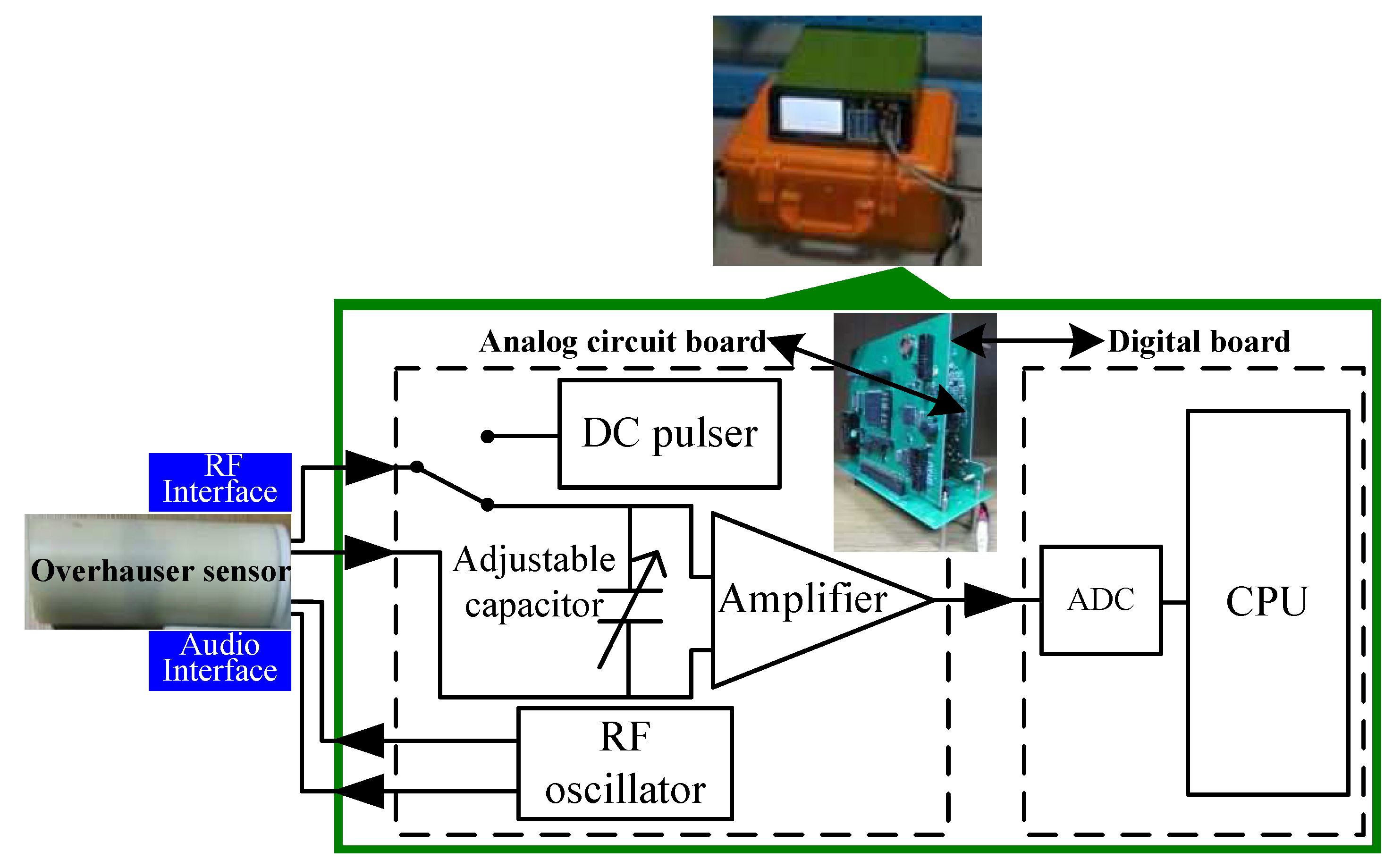
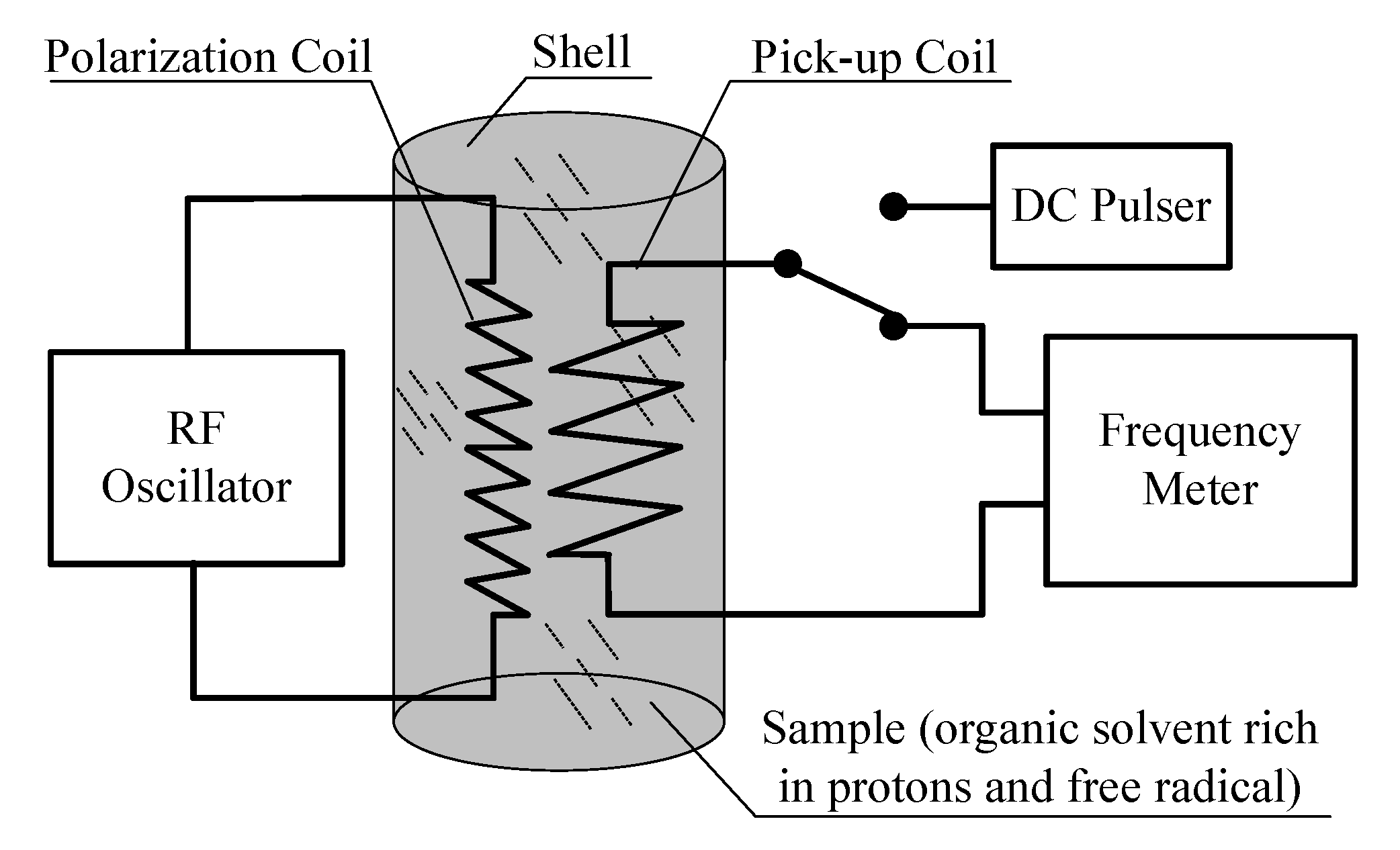
4. Design of the Test Instrument
5. Experiments
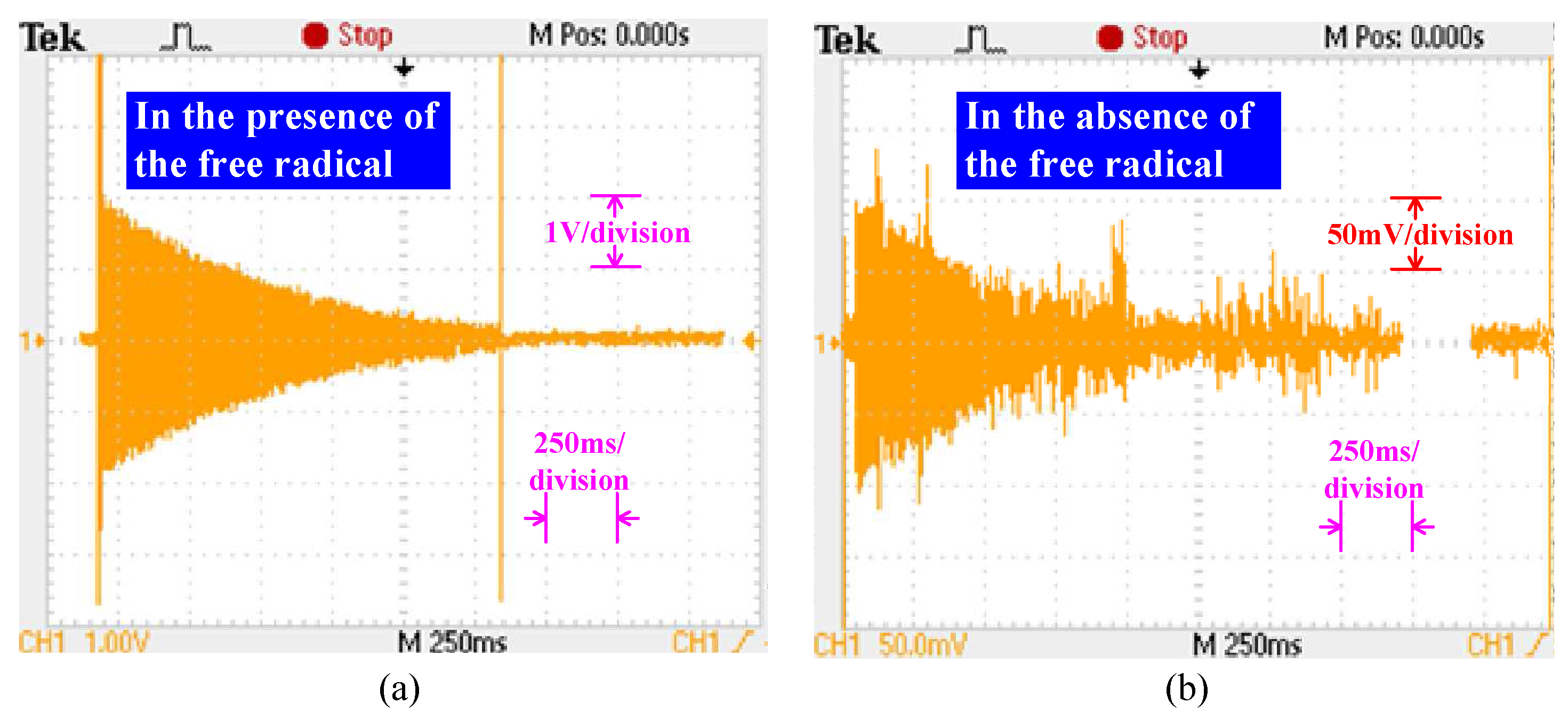
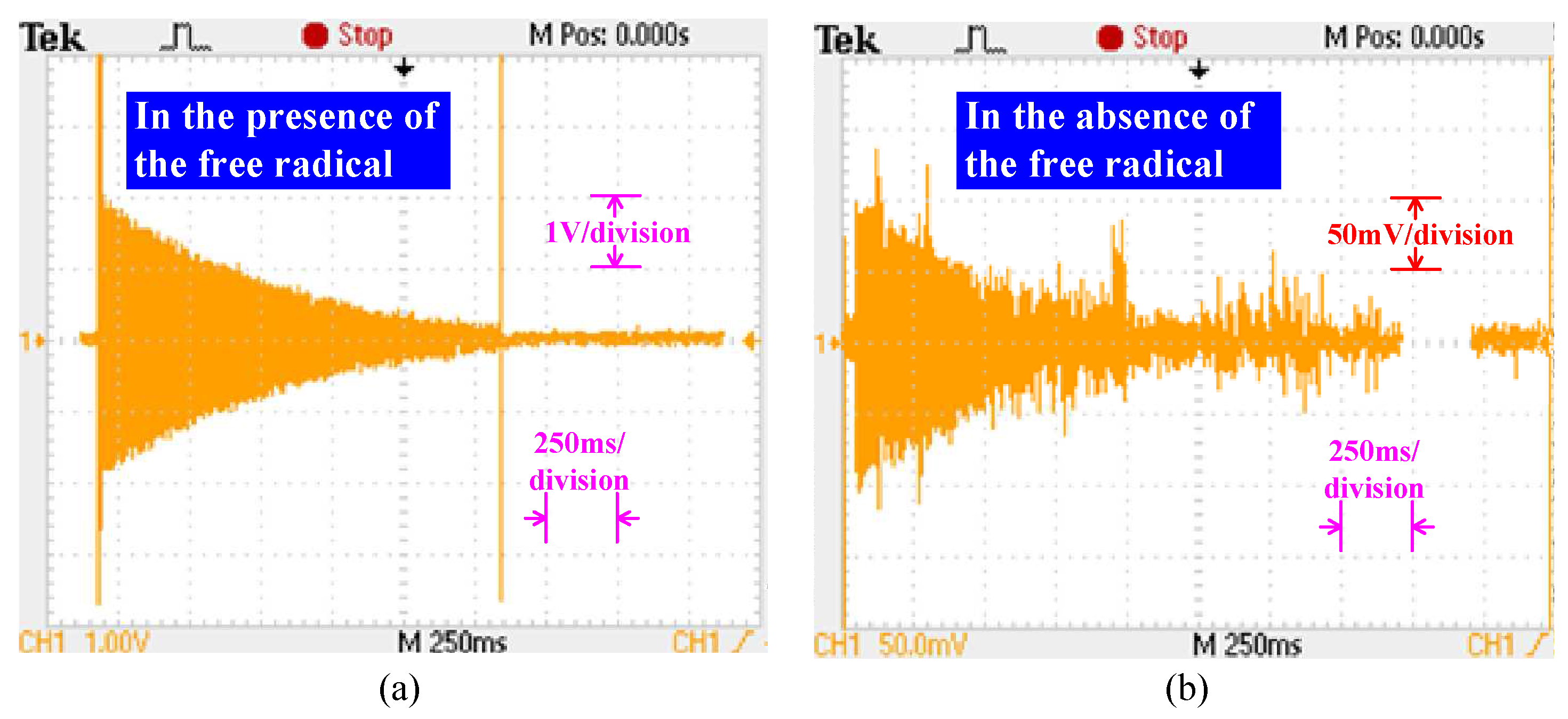
5.1. FID Signal Comparison
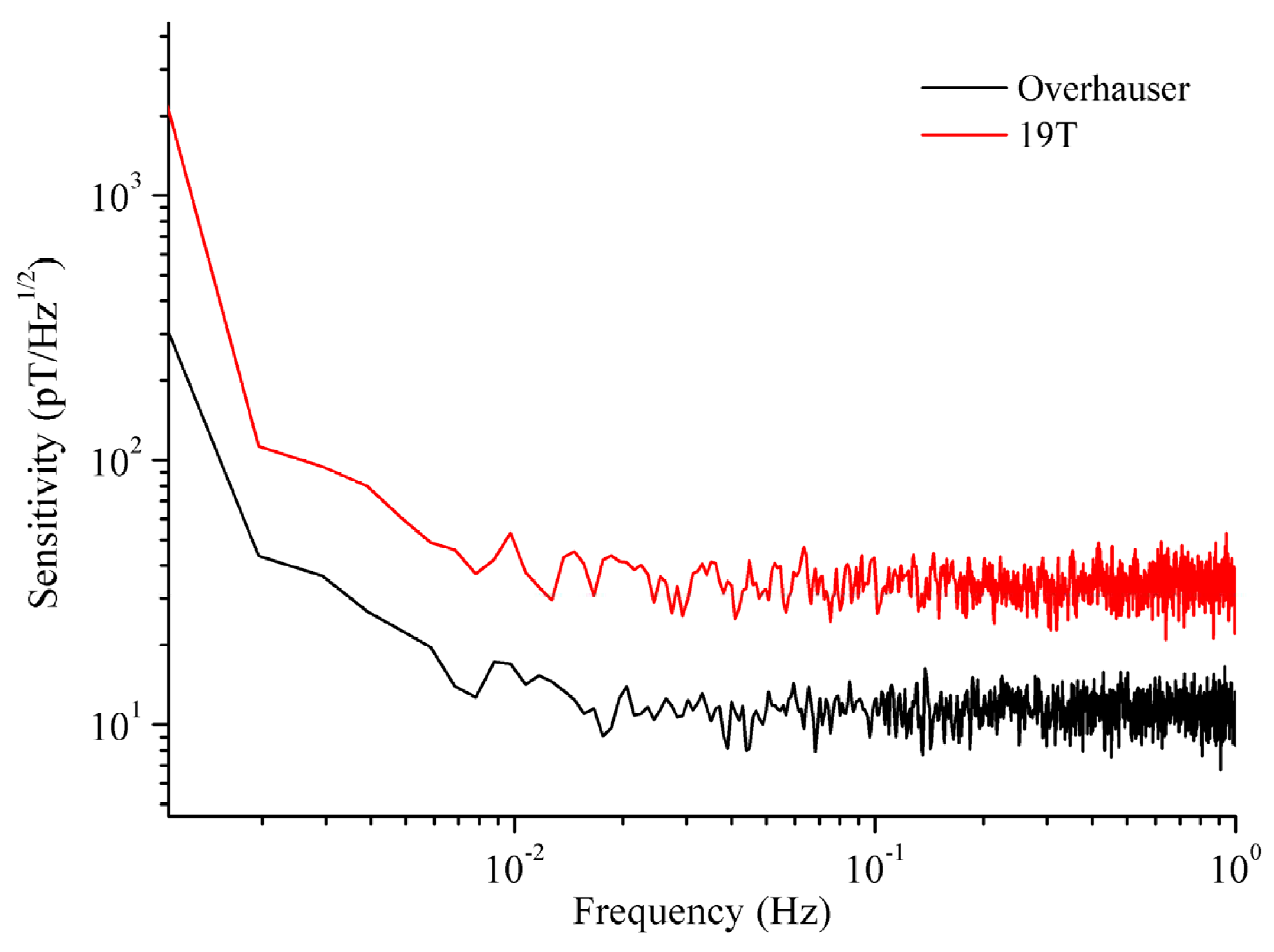
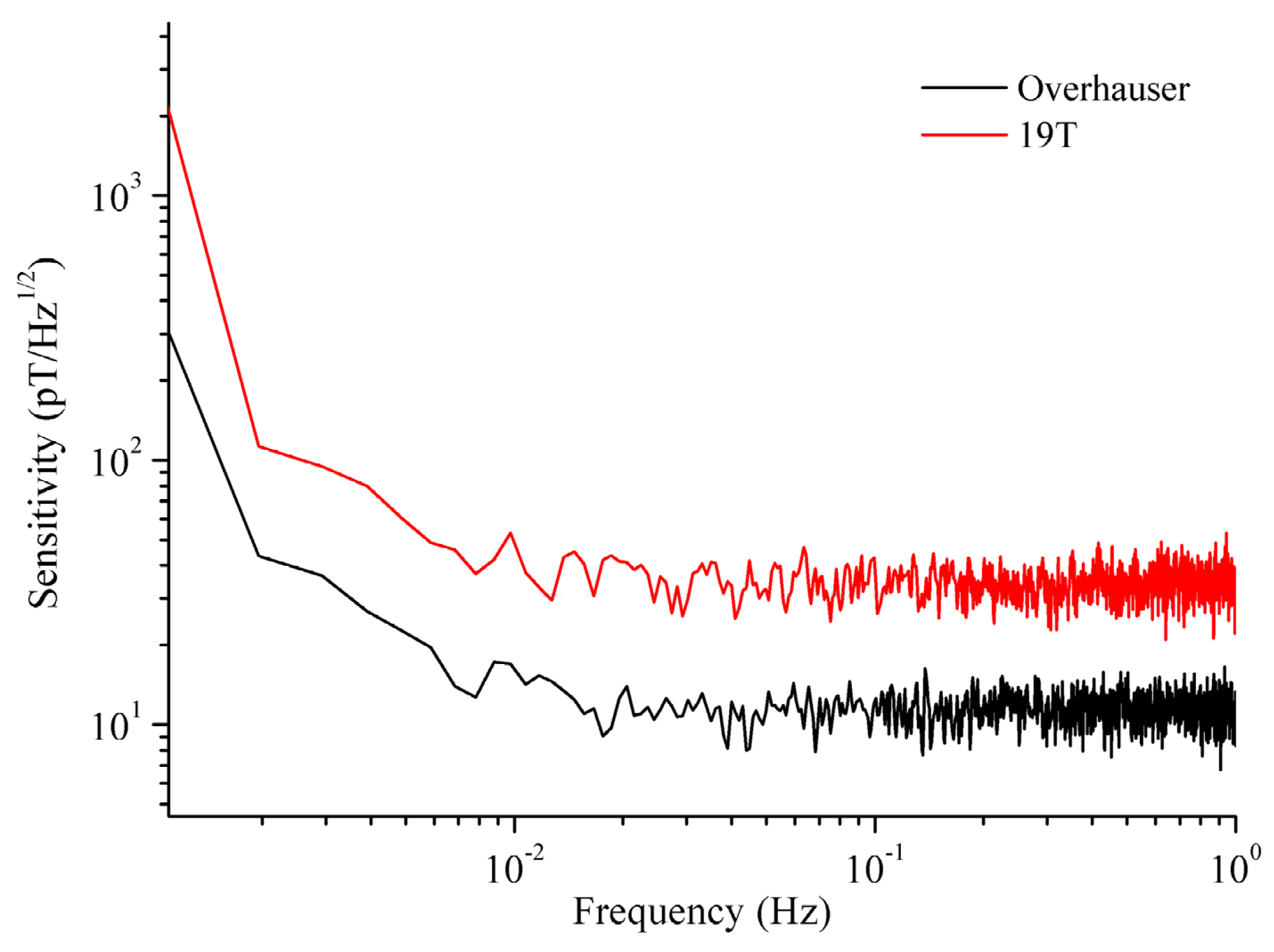
5.2. Main Specifications
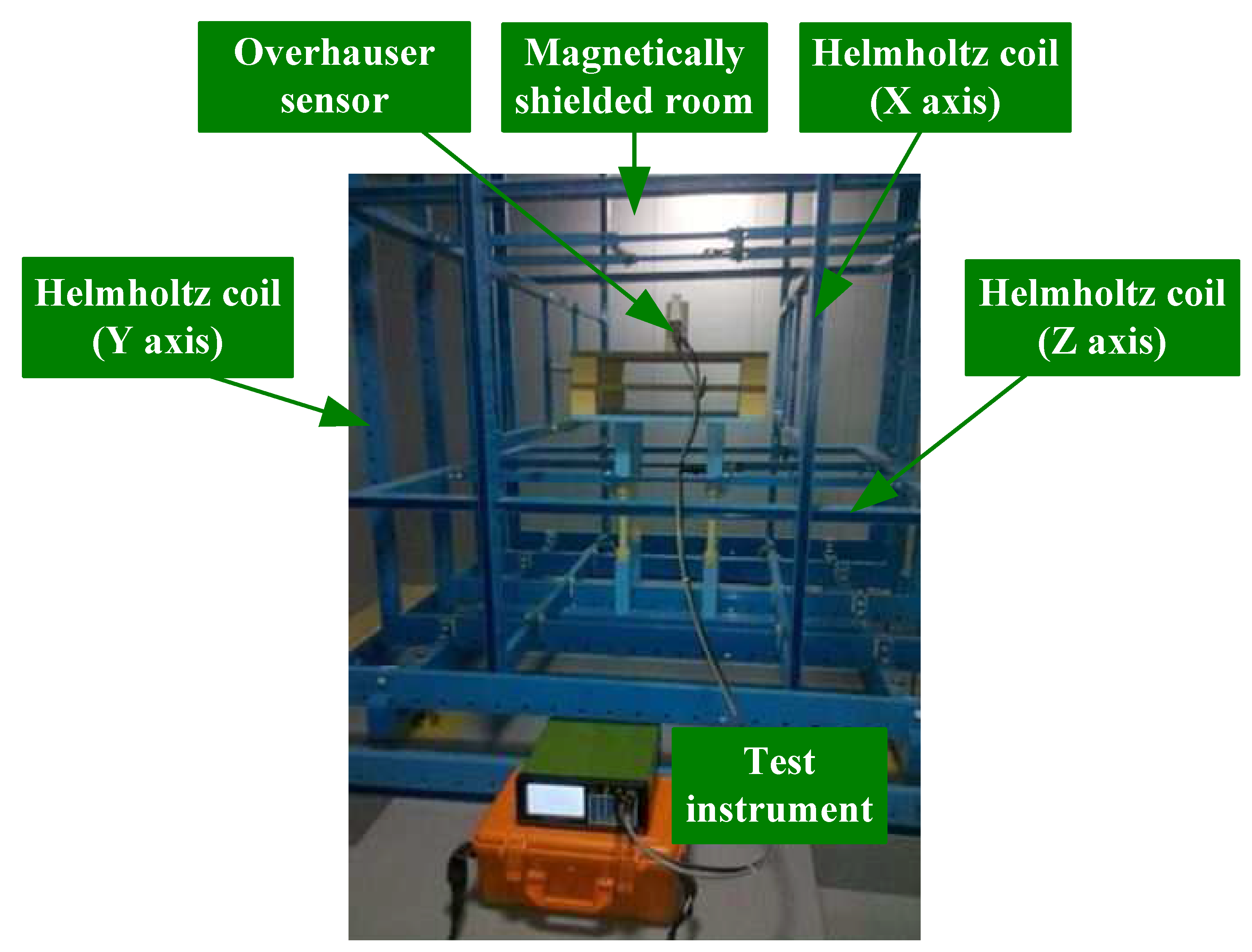
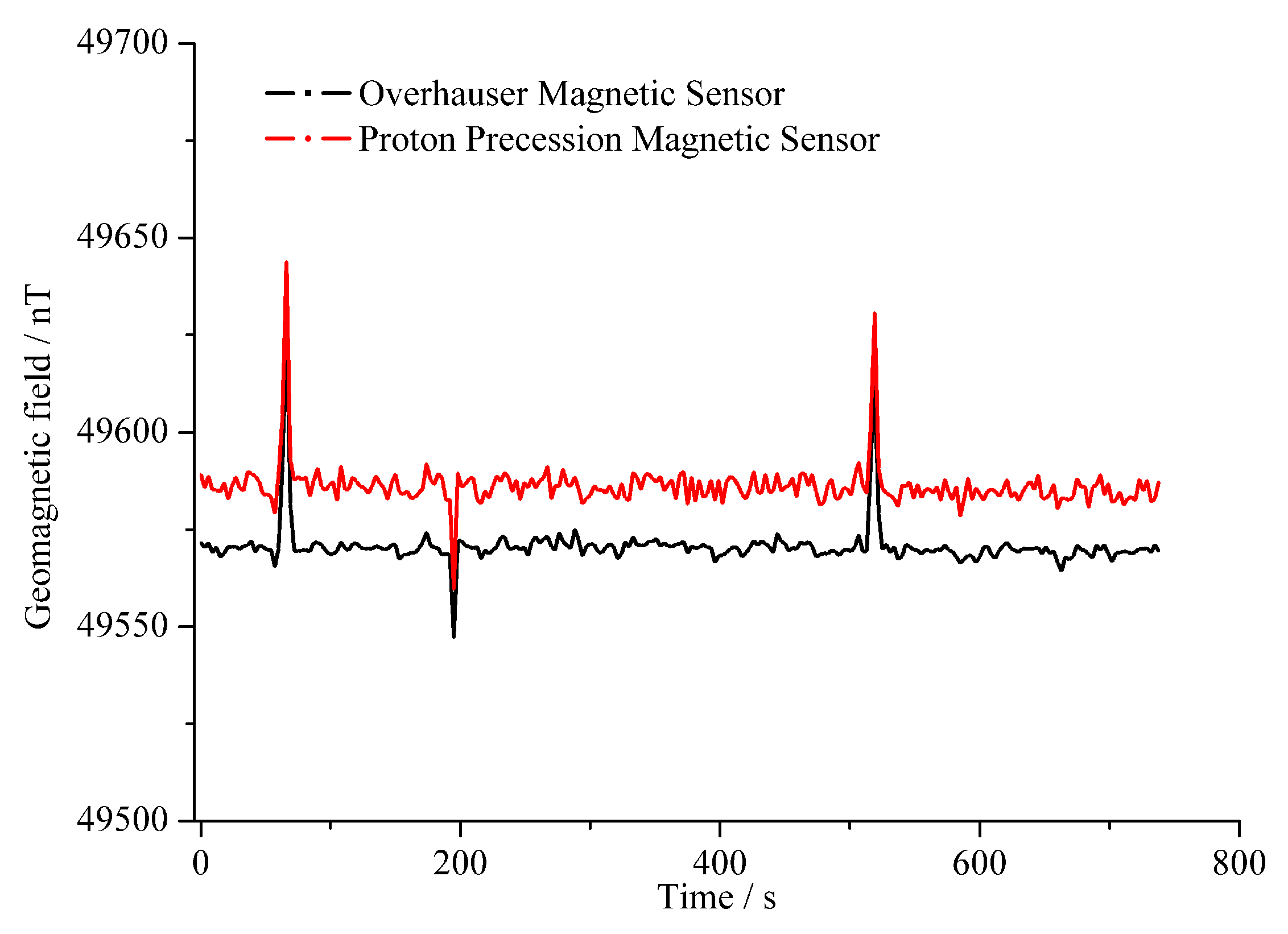
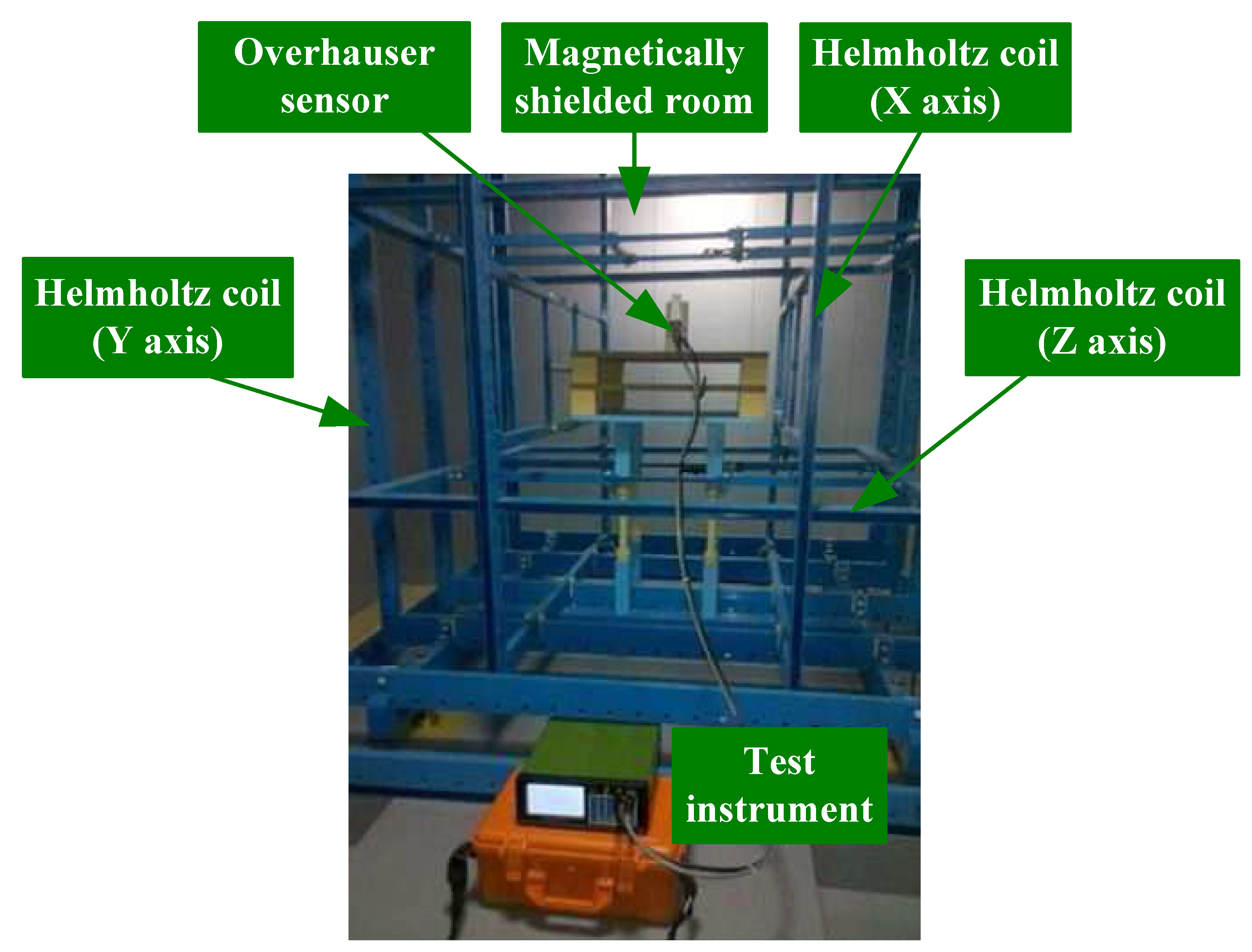
5.3. Field Test
- (1)
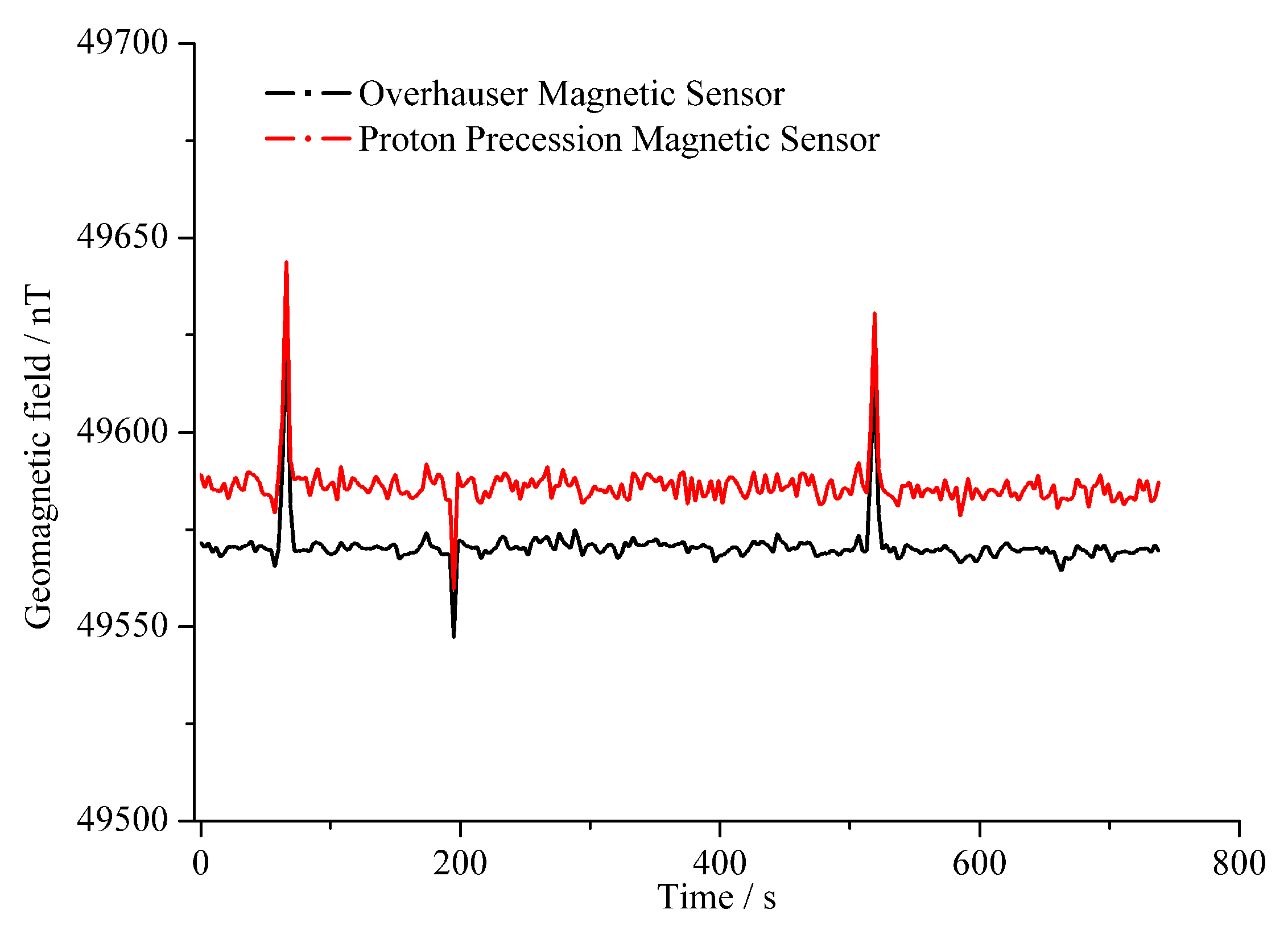
- The trends in the geomagnetic field measurements from the two sensors are basically coincident, although the two curves did not overlap. The baseline difference is about 15 nT. The main cause is the magnetic field gradients at the locations of the sensors. Despite being 5 m apart, the Earth’s magnetic field gradient can be ignored. In contrast, with the limitations in test conditions, the fixed magnetic anomaly generated by buildings, pipelines and roads nearby the sensors also can give rise to a magnetic field gradient. However, such magnetic anomalies are different from random EMI and do not affect a comparison of the two sensors.
- (2)
- In the field test, to verify the detection capability of the magnetic anomaly of the two sensors, a bicycle was ridden nearby the sensors at 70, 200 and 520 s to generate an artificial magnetic anomaly. The test results show that both of the sensors were able to detect a magnetic anomaly of +30 nT, −10 nT and +20 nT, respectively, which indicated a normal detection capability for the Overhauser sensor.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kana, J.D.; Djongyang, N.; Raidandi, D.; Nouck, P.N.; Dadjé, A. A review of geophysical methods for geothermal exploration. Renew. Sustain. Energy Rev. 2015, 44, 87–95. [Google Scholar] [CrossRef]
- Nabighian, M.N.; Grauch, V.J.S.; Hansen, R.O.; Lafehr, T.R.; Li, Y.; Peirce, J.W.; Phillips, J.D.; Ruder, M.E. The historical development of the magnetic method in exploration. Geophysics 2005, 70, 33ND–61ND. [Google Scholar] [CrossRef]
- Haobin, D.; Changda, Z. A further review of the quantum magnetometers. Chin. J. Eng. Geophys. 2010, 7, 460–470. [Google Scholar]
- Fang, J.; Wang, T.; Zhang, H.; Li, Y.; Zou, S. Optimizations of spin-exchange relaxation-free magnetometer based on potassium and rubidium hybrid optical pumping. Rev. Sci. Instrum. 2014, 85, 123104. [Google Scholar] [CrossRef] [PubMed]
- Belfi, J.; Bevilacqua, G.; Biancalana, V.; Cartaleva, S.; Dancheva, Y.; Khanbekyan, K.; Moi, L. Dual channel self-oscillating optical magnetometer. J. Opt. Soc. Am. B: Opt. Phys. 2009, 26, 910–916. [Google Scholar] [CrossRef]
- Nikiel, A.; Blĺźmler, P.; Heil, W.; Hehn, M.; Karpuk, S.; Maul, A.; Otten, E.; Schreiber, L.M.; Terekhov, M. Ultrasensitive 3He magnetometer for measurements of high magnetic fields. Eur. Phys. J. D 2014, 68, 1–12. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, Z.; Dong, H.; Tao, A. Design of the magnetic field sensor for proton precession magnetometer based on DC pulse polarization. Chin. J. Sci. Instrum. 2014, 35, 850–858. [Google Scholar]
- Wang, H.; Dong, H.; Li, Z.; Bian, J. The study of FID signal detection technology of proton magnetometer based on prony method. J. Inf. Comput. Sci. 2012, 9, 3265–3272. [Google Scholar]
- Primdahl, F.; Merayo, J.M.G.; Brauer, P.; Laursen, I.; Risbo, T. Internal field of homogeneously magnetized toroid sensor for proton free precession magnetometer. Measur. Sci. Technol. 2005, 16, 590. [Google Scholar] [CrossRef]
- Tan, C.; Dong, H.; Ge, Z. OVERHAUSER magnetometer excitation and receiving system design. Chin. J. Sci. Instrum. 2010, 31, 1867–1872. [Google Scholar]
- Meusinger, R. Nuclear Overhauser effect challenge. Anal. Bioanal. Chem. 2011, 99, 2303–2306. [Google Scholar] [CrossRef] [PubMed]
- Overhauser, A.W. Polarization of nuclei in metals. Phys. Rev. 1953, 92, 411–415. [Google Scholar] [CrossRef]
- Abragam, A. Overhauser effect in nonmetals. Phys. Rev. 1955, 98, 1729–1735. [Google Scholar] [CrossRef]
- Duret, D.; Leger, J.M.; Frances, M.; Bonzom, J.; Alcouffe, F.; Perret, A.; Llorens, J.C.; Baby, C. Performances of the OVH magnetometer for the Danish Oersted satellite. IEEE Trans. Magn. 1996, 32, 4935–4937. [Google Scholar] [CrossRef]
- Kernevez, N.; Glenat, H. Description of a high sensitivity CW scalar DNP-NMR magnetometer. IEEE Trans. Magn. 1991, 27, 5402–5404. [Google Scholar] [CrossRef]
- Kernevez, N.; Duret, D.; Moussavi, M.; Leger, J.M. Weak field NMR and ESR spectrometers and magnetometers. IEEE Trans. Magn. 1992, 28, 3054–3059. [Google Scholar] [CrossRef]
- Sapunov, V.; Denisov, A.; Denisova, O.; Saveliev, D. Proton and Overhauser magnetometers metrology. Contrib. Geophys. Geodesy 2001, 31, 119–124. [Google Scholar]
- Hrvoic, I. Requirements for obtaining high accuracy with proton magnetometers. In Proceedings of the VIth Workshop On Geomagnetic Observatory Instruments Data Acquisition and Processing, Dourbes, Belgium, 4–10 September 1996; pp. 70–72.
- Hrvoic, I. Overhauser Magnetometers for Measurement of the Earth’s Magnetic Field. In Proceedings of the Magnetic Field Workshop on Magnetic Observatory Instrumentation, Nurmijarvi, Finland, 15–25 May 1989; pp. 70–72.
- Mandea, M.; Korte, M. Geomagnetic Observations and Models; Springer Press: Berlin, Germany, 2011; pp. 105–126. [Google Scholar]
- Lingwood, M.D.; Han, S. Dynamic nuclear polarization of 13C in aqueous solutions under ambient conditions. J. Magn. Reson. 2009, 201, 137–145. [Google Scholar] [CrossRef] [PubMed]
- Benial, A.M.F.; Ichikawa, K.; Murugesan, R.; Yamada, K.; Utsumi, H. Dynamic nuclear polarization properties of nitroxyl radicals used in Overhauser-enhanced MRI for simultaneous molecular imaging. J. Magn. Reson. 2006, 182, 273–282. [Google Scholar] [CrossRef] [PubMed]
- Armstrong, B.D.; Han, S. A new model for Overhauser enhanced nuclear magnetic resonance using nitroxide radicals. J. Chem. Phys. 2007, 127, 104508. [Google Scholar] [CrossRef] [PubMed]
- Griesinger, C.; Bennati, M.; Vieth, H.M.; Luchinat, C.; Parigi, G.; Hofer, P.; Engelke, F.; Glaser, S.J.; Denysenkov, V.; Prisner, T.F. Dynamic nuclear polarization at high magnetic fields in liquids. Progr. Nuclear Magn. Reson. Spectrosc. 2012, 64, 4–28. [Google Scholar] [CrossRef] [PubMed]
- Dhas, M.K.; Utsumi, H.; Jawahar, A.; Benial, A.M.F. Dynamic Nuclear Polarization Properties of Nitroxyl Radical in High Viscous Liquid using Overhauser-Enhanced Magnetic Resonance Imaging (OMRI). J. Magn. Reson. 2015, 257, 32–38. [Google Scholar] [CrossRef] [PubMed]
- Armstrong, B.D.; Han, S. A new model for Overhauser enhanced nuclear magnetic resonance using nitroxide radicals. J. Chem. Phys. 2007, 127, 104508. [Google Scholar] [CrossRef] [PubMed]
- Lingwood, M.D.; Siaw, T.A.; Sailasuta, N.; Ross, B.D.; Bhattacharya, P.; Han, S. Continuous flow Overhauser dynamic nuclear polarization of water in the fringe field of a clinical magnetic resonance imaging system for authentic image contrast. J. Magn. Reson. 2010, 205, 247–254. [Google Scholar] [CrossRef] [PubMed]
- Gupta, H.K. Magnetometers, Encyclopedia of Solid Earth Geophysics; Springer Press: Berlin, Germany, 2011; pp. 810–816. [Google Scholar]
- Dong, Y.; Fan, Q.; Liu, T.; Huang, C. Transmission characteristics of microwave rectangular waveguide with transverse inductive diaphragms. High Power Laser Part. Beams 2013, 25, 431–435. [Google Scholar] [CrossRef]
- Ding, Y-G.; Liu, X.; Dong, Y.-H. Research on parameters of higher-order transverse magnetic modes in cylindrical coaxial cavity resonator. Acta Phys. Sin. 2005, 54, 5629–5636. [Google Scholar]
- Russer, P. Electromagnetics, Microwave Circuit and Antenna Design for Communications Engineering; Artech House: Norwood, MA, USA, 2003; pp. 170–180. [Google Scholar]
- Ge, J.; Lu, C.; Dong, H.; Liu, H.; Yuan, Z.; Zhao, Z. The detection technology of near-surface UXO based on magnetic gradient method and Overhauser sensor. Chin. J. Sci. Instrum. 2015, 36, 38–50. [Google Scholar]
- Budker, D.; Kimball, D.F.J. Optical Magnetometry; Cambridge University Press: Cambridge, UK, 2013; pp. 810–816. [Google Scholar]
- Magnetometer Definitions Quick Reference. Available online: http://www.gemsys.ca/technology/subscribe-to-quantum-e-news/quantum-v1-winter-2002/tricky-definitions-gem-provides-a-quick-reference- guide-for-experts-and-beginners/ (accessed on 9 April 2016).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Artificial Magnetic Field | Average | Uncertainty | ||
|---|---|---|---|---|
| Overhauser | GSM-19T | Overhauser | GSM-19T | |
| 20,112.4 | 20,112.52 | 20,113.43 | 0.2 | 1.9 |
| 49,900.3 | 49,900.35 | 49,901.12 | 0.1 | 1.1 |
| 100,150.7 | 100,150.78 | 100,151.15 | 0.1 | 0.8 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, J.; Dong, H.; Liu, H.; Yuan, Z.; Dong, H.; Zhao, Z.; Liu, Y.; Zhu, J.; Zhang, H. Overhauser Geomagnetic Sensor Based on the Dynamic Nuclear Polarization Effect for Magnetic Prospecting. Sensors 2016, 16, 806. https://doi.org/10.3390/s16060806
Ge J, Dong H, Liu H, Yuan Z, Dong H, Zhao Z, Liu Y, Zhu J, Zhang H. Overhauser Geomagnetic Sensor Based on the Dynamic Nuclear Polarization Effect for Magnetic Prospecting. Sensors. 2016; 16(6):806. https://doi.org/10.3390/s16060806
Chicago/Turabian StyleGe, Jian, Haobin Dong, Huan Liu, Zhiwen Yuan, He Dong, Zhizhuo Zhao, Yonghua Liu, Jun Zhu, and Haiyang Zhang. 2016. "Overhauser Geomagnetic Sensor Based on the Dynamic Nuclear Polarization Effect for Magnetic Prospecting" Sensors 16, no. 6: 806. https://doi.org/10.3390/s16060806
APA StyleGe, J., Dong, H., Liu, H., Yuan, Z., Dong, H., Zhao, Z., Liu, Y., Zhu, J., & Zhang, H. (2016). Overhauser Geomagnetic Sensor Based on the Dynamic Nuclear Polarization Effect for Magnetic Prospecting. Sensors, 16(6), 806. https://doi.org/10.3390/s16060806