Precise Point Positioning Using Triple GNSS Constellations in Various Modes

Abstract
:1. Introduction
2. Un-Differenced Post-Processing PPP Models
3. BSSD Post-Processing PPP Models
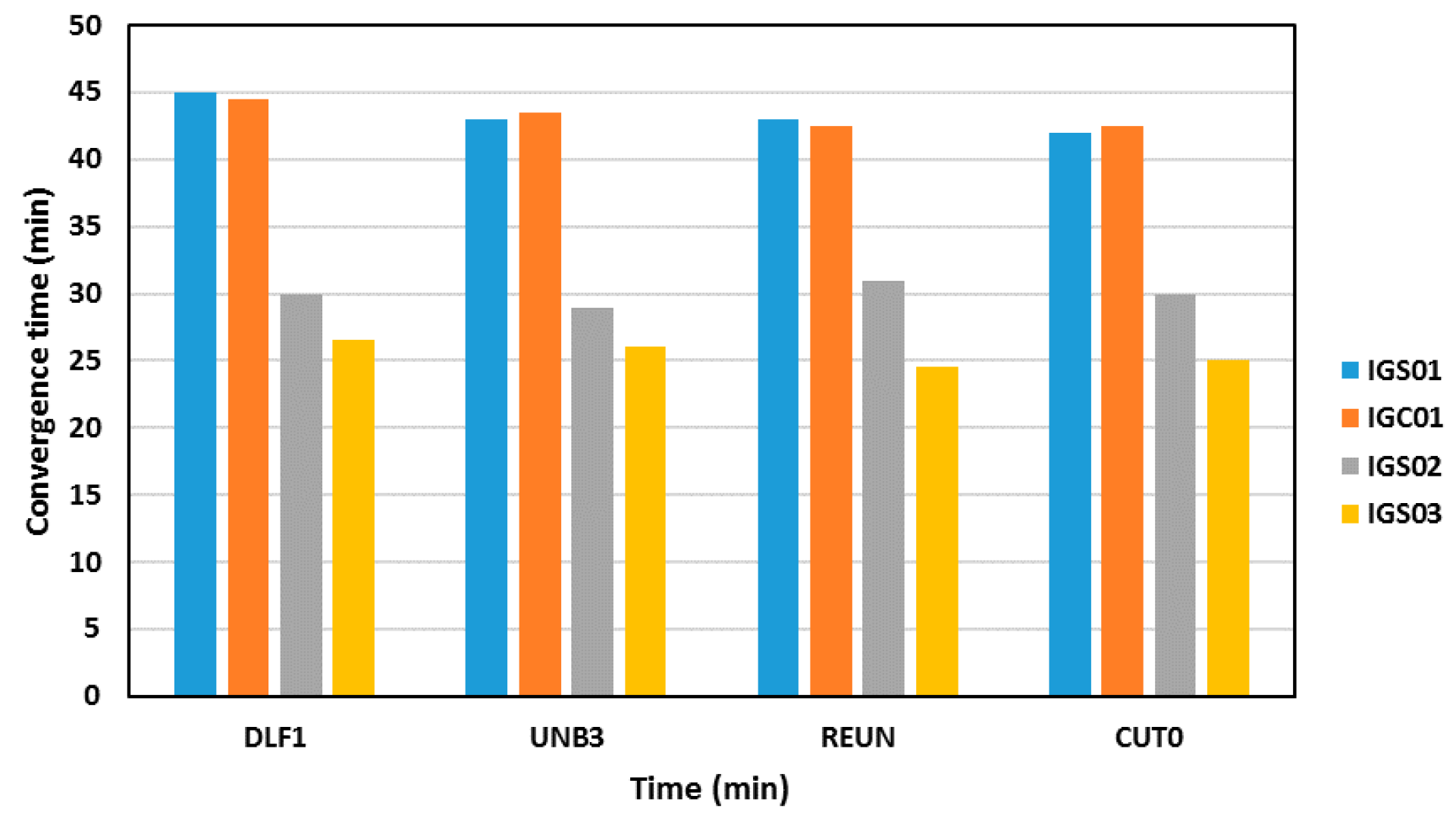
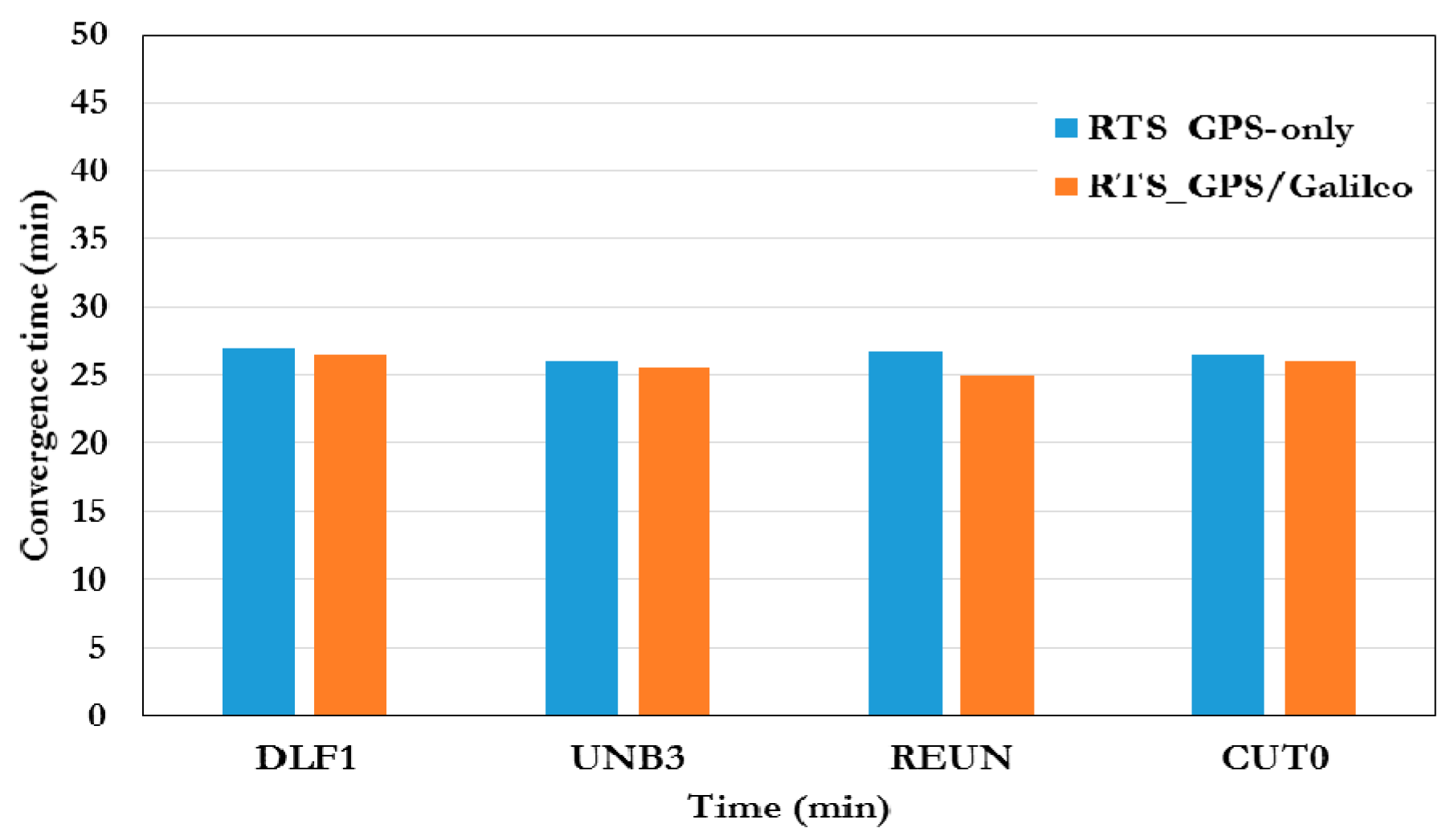
4. Real-Time PPP Satellite Clock Corrections
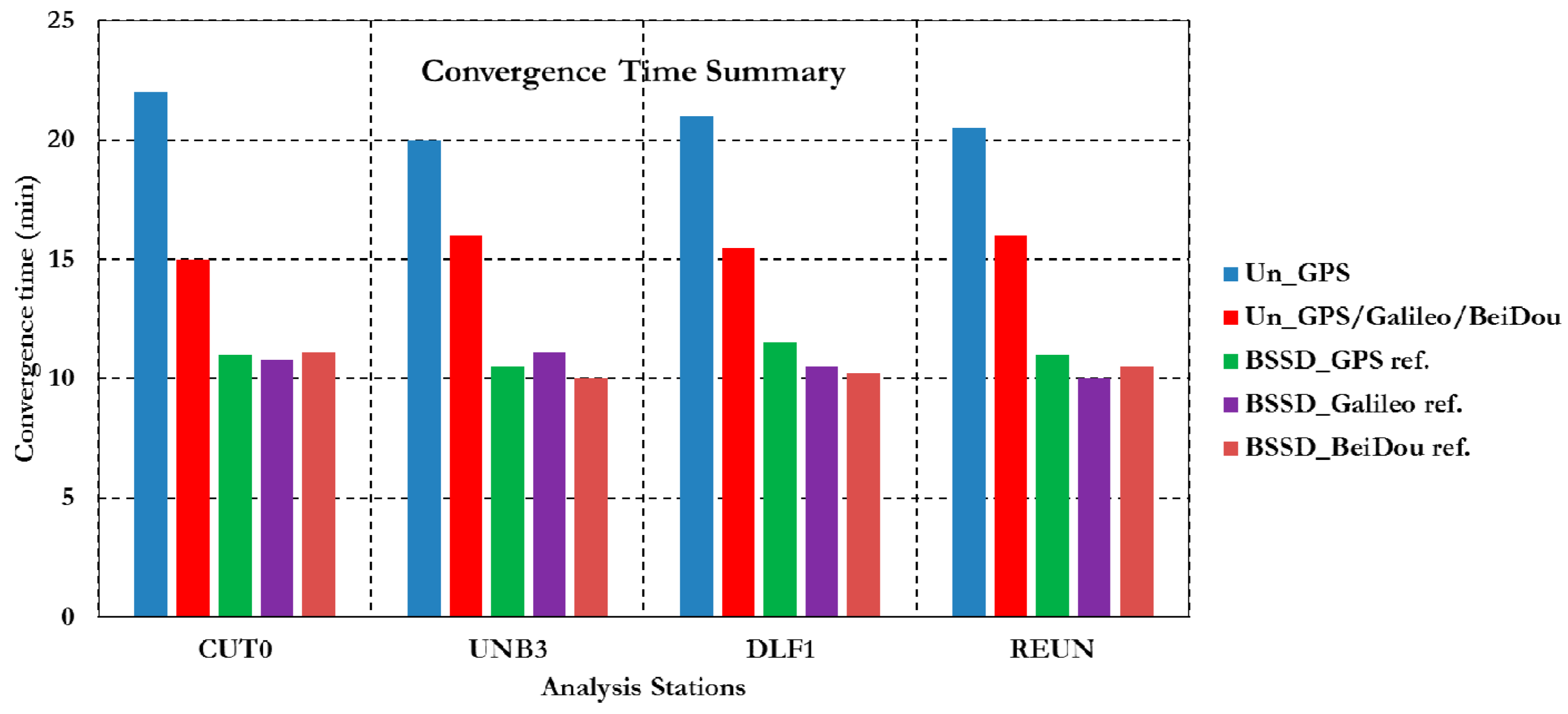
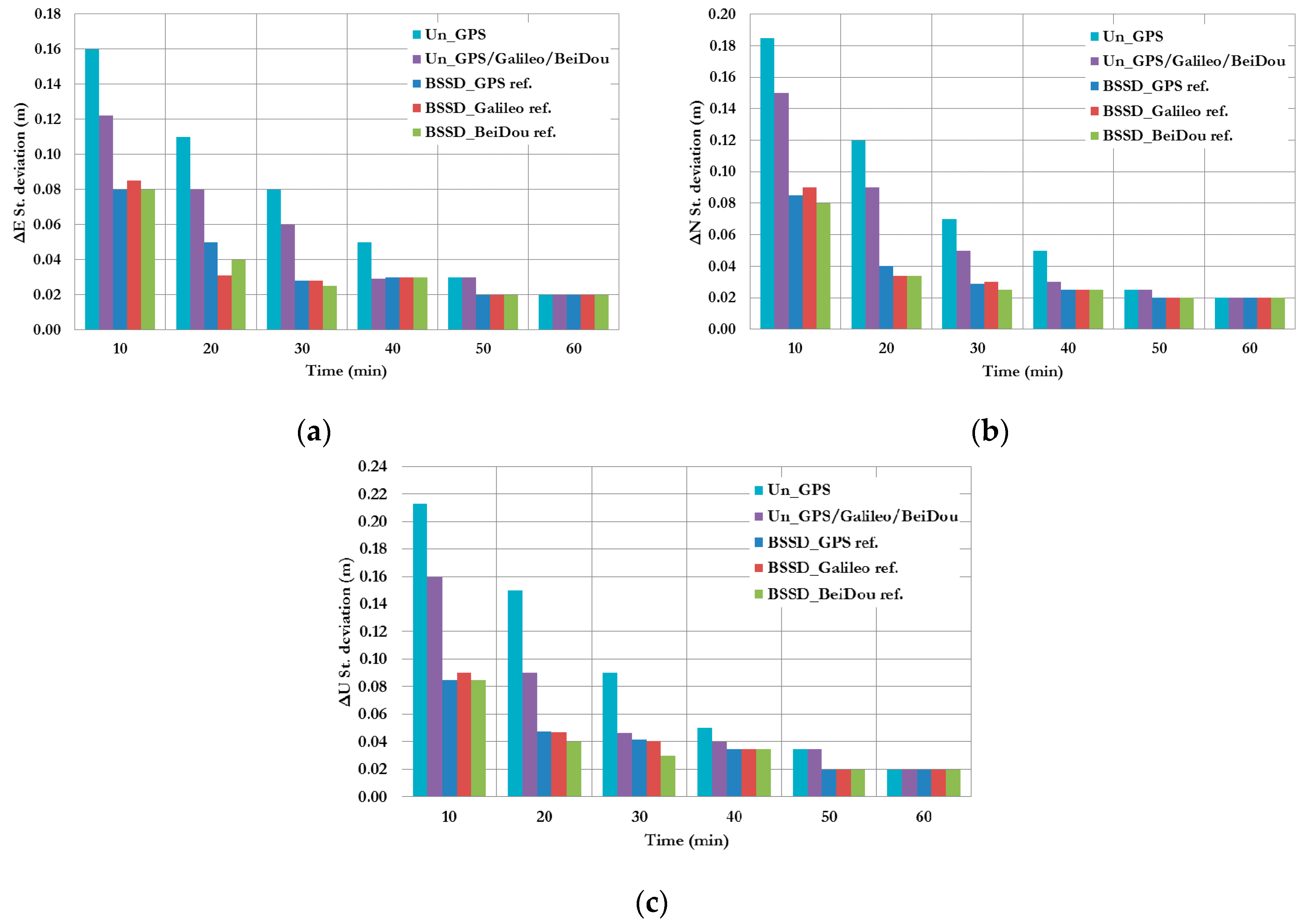
5. Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.B.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the ground for multi-constellation GNSS science. InsideGNSS 2014, 9, 42–49. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Heroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Colombo, O.L.; Sutter, A.W.; Evans, A.G. Evaluation of precise, kinematic GPS point positioning. In Proceedings of the 17th Institute of Navigation (ION) GNSS Meeting, Long Beach, CA, USA, 21–24 September 2004.
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 401. [Google Scholar] [CrossRef]
- Collins, P.; Bisnath, S.; Lahaye, F.; Héroux, P. Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing. Navigation 2010, 57, 123–135. [Google Scholar] [CrossRef]
- Afifi, A.; El-Rabbany, A. Performance Analysis of Several GPS/Galileo Precise Point Positioning Models. Sensors 2015, 15, 14701–14726. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS Global Navigation Satellite Systems. GPS, Glonass, Galileo & More; Springer Wien: New York, NY, USA, 2008; p. 501. [Google Scholar]
- Leick, A. GPS Satellite Surveying, 3rd ed.; John Wiley and Sons: New York, NY, USA, 2004. [Google Scholar]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Tegedor, J.; Øvstedal, O.; Vigen, E. Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J. Geod. Sci. 2014, 4, 2081–9943. [Google Scholar] [CrossRef]
- Odijk, D.; Zhang, B.; Khodabandeh, A.; Odolinski, R.; Teunissen, P.J.G. On the estimability of parameters in undifferenced, uncombined GNSS network and PPP-RTK user models by means of S-system theory. J. Geod. 2016, 90, 15–44. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2014, 19, 151–163. [Google Scholar] [CrossRef]
- Changsheng, C.; Yang, G.; Lin, P.; Jianjun, Z. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar]
- Yuan, Y.; Zhang, B. Retrieval of inter-system biases (ISBs) using a network of multi-GNSS receivers. J. Glob. Position Syst. 2014, 13, 22–29. [Google Scholar]
- Nadarajah, N.; Teunissen, P.J.G.; Sleewaegen, J.-M.; Montenbruck, O. The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. 2015, 19, 357–368. [Google Scholar] [CrossRef]
- Nadarajah, N.; Teunissen, P.J.G.; Raziq, N. Beidou inter-satellite-type bias evaluation and calibration for mixed receiver attitude determination. Sensors 2013, 13, 9435–9463. [Google Scholar] [CrossRef] [PubMed]
- Tegedor, J.; Liu, X.; de Jong, K.; Goode, M.; Øvstedal, O.; Vigen, E. Estimation of Galileo uncalibrated hardware delays for ambiguity-fixed precise point positioning. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute Of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 2346–2353.
- Grinter, T.; Roberts, C. Real Time Precise Point Positioning: Are We There Yet? In Proceedings of the IGNSS Symposium Outrigger, Gold Coast, Australia, 16–18 July 2013.
- IGS Real Time IGS Pilot Project Status Report (IGS Workshop Presentation June, 2010), 2016. Available online: http://www.rtigs.net/docs/IGS_Workshop_June_2010_RTIGS_PP_StatusReport_3.pdf (accessed on 16 February 2016).
- Wang, M.; Cai, H.; Pan, Z. BDS/GPS relative positioning for long baseline with undifferenced observations. Adv. Space Res. 2015, 55, 113–124. [Google Scholar] [CrossRef]
- Changsheng, C.; Yang, G.; Lin, P.; Wujiao, D. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions. Adv. Space Res. 2014, 54, 818–829. [Google Scholar]
- Odijk, D.; Teunissen, P.J.G. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2013, 17, 521–533. [Google Scholar] [CrossRef]
- Torre, A.D.; Caporali, A. An analysis of intersystem biases for multi-GNSS positioning. GPS Solut. 2015, 19, 297–307. [Google Scholar] [CrossRef]
- Hopfield, H.S. Tropospheric refraction effects on satellite range measurements. APL Tech. Dig. 1972, 11, 11–19. [Google Scholar]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. 2009. Available online: http://igscb.jpl.nasa.gov/igscb/resource/pubs/UsingIGSProductsVer21.pdf (accessed on 15 April 2016). [Google Scholar]
- Afifi, A.; El-Rabbany, A. An innovative dual frequency PPP model for combined GPS/Galileo observations. J. Appl. Geod. 2015, 9, 27–34. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Doua, J.; Wickert, J. Real-time precise point positioning regional augmentation for large GPS reference networks. GPS Solut. 2014, 18, 61–71. [Google Scholar] [CrossRef]
- Boehm, J.; Schuh, H. Vienna mapping functions in VLBI analyses. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Bos, M.S.; Scherneck, H.-G. Ocean Tide Loading Provider. 2011. Available online: http://holt.oso.chalmers.se/loading/ (accessed on 1 December 2014).
- IERS. International Earth Rotation and Reference System Services Conventions. IERS Technical Note 36. 2010. Available online: http://www.iers.org/IERS/EN/Publications/TechnicalNotes/tn36.html/ (accessed on 15 April 2016).
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Kaplan, E.; Heagarty, C. Understanding GPS Principles and Applications; Artech House Inc.: Boston, MA, USA, 2006. [Google Scholar]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Afifi, A.; El-Rabbany, A. An Improved Between-Satellite Single-Difference Precise Point Positioning Model for Combined GPS/Galileo Observations. J. Appl. Geod. 2015, 9, 1862–9016. [Google Scholar] [CrossRef]
- Caissy, M.; Agrotis, L.; Weber, G.; Hernandez-Pajares, M.; Hugentobler, U. Innovation: The International GNSS Real-Time Service. GPS World 2012, 23, 52–58. [Google Scholar]
- IGS Real Time service, 2016. Available online: http://www.igs.org/rts/products (accessed on 15 April 2016).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product | Format | Frequency |
|---|---|---|
| GNSS Data | RTCM 3 | 1 s |
| GPS orbit corrections | RTCM-SSR | 5 or 60 s |
| GPS clock Corrections | RTCM-SSR | 5 s |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afifi, A.; El-Rabbany, A. Precise Point Positioning Using Triple GNSS Constellations in Various Modes. Sensors 2016, 16, 779. https://doi.org/10.3390/s16060779
Afifi A, El-Rabbany A. Precise Point Positioning Using Triple GNSS Constellations in Various Modes. Sensors. 2016; 16(6):779. https://doi.org/10.3390/s16060779
Chicago/Turabian StyleAfifi, Akram, and Ahmed El-Rabbany. 2016. "Precise Point Positioning Using Triple GNSS Constellations in Various Modes" Sensors 16, no. 6: 779. https://doi.org/10.3390/s16060779
APA StyleAfifi, A., & El-Rabbany, A. (2016). Precise Point Positioning Using Triple GNSS Constellations in Various Modes. Sensors, 16(6), 779. https://doi.org/10.3390/s16060779