1. Introduction
Rotational parameters, which include angular displacement, velocity and acceleration, can describe the performance, operation states and kinetic characteristics of rotating systems [
1,
2], such as the vortices of fluid substances, gear transfer systems, rotational machines and fan blades,
etc. The exact measurement of transient velocity is vitally important for accurately controlling and monitoring the movements of some bodies, and for acquiring fault information in machine diagnoses [
3]. Thus the method of sensing rotational velocity can be used for the analyses, monitoring and control of mechanical systems, swirling gas- or fluid flow,
etc.
For sensing rotational or angular velocity, there exist methods using gyroscopes, marking methods, interferometry, correlation methods, circular grating sensing and spatial filtering methods,
etc. The gyroscope method using a Sagnac-effect-based integrated gyroscope with small footprint has high resolution, and can sense transient angular velocity [
4,
5,
6]. However it is not suitable for remote measurement and super-low velocity, and can be affected by environmental factors [
7,
8]. The interferometry methods, including Fabry-Perot cavities and Mach-Zehnder interferometers, have complicated structures and high precision fabrication requirements [
9,
10,
11]. In the correlation method, the traditional cross-correlation (TCC) is often used to process the output signals of two identical sensors in the measured region [
12,
13,
14], which provides non-contact measurements with low cost for monitoring gas-solid and solid-liquid flows [
15,
16,
17,
18]. The image matching method, in which a high-speed camera captures a series of instantaneous images to calculate velocity, also belongs to the correlation methods [
19,
20,
21,
22]. Correlation methods are less applied for remotely sensing transient angular velocity, due to the numerous multiplication operations required. Marking methods with optical labels (plus quadrant photodiode) or Hall-effect sensors mainly sense average rotational velocities with lower resolution or direction ambiguity [
23,
24], which can hardly measure instantaneous rotational velocity. The methods based on circular gratings like optical gratings [
25,
26] and magnetic grids can be employed to sense the transient angular velocity of target objects with high resolution [
27,
28]. Their circular gratings must be set up as circular division disks to be coaxially mounted on the measured object, and their resolution and precision are dependant on the grating grooves. Optical gratings are easily destroyed by tiny dust particles and greasy dirt. In some cases such as those of high-speed rotating machines or when measuring gas- or fluid flows,
etc., circular benchmarks cannot be mounted on the measured systems die to limitations in their structures, or their performances are possibly deteriorated. In the spatial filtering (SF) method [
29], a center coefficient is obtained from the central frequencies of the output signals of two differential spatial filters. Then the rotational velocity is calculated with the central frequencies and the center coefficient, and its direction is determined by the center coefficient and one linear displacement direction. Rotational velocity measurements using the SF method are complicated, since they need to compute all the center coefficients, the central frequencies and the displacement direction.
This paper will present a novel approach for remotely evaluating transient rotational velocities with a quadrant photo-detector (QPD) and a differential subtraction correlation (DSC) algorithm proposed by us, which does not require any circular indexing plates or benchmarks. The QPD outputs four random signals, from which the amplitude and direction of the rotational velocity are obtained simultaneously by using the DSC algorithm that only needs addition and subtraction operations without any multiplication or division, which should make it faster than other correlation methods. This paper is organized as follows:
Section 2 shows the rotational velocity sensing system;
Section 3 describes its evaluation principle in detail;
Section 4 presents some experimental calculations to verify the proposed approach, and the final section gives our conclusions.
2. System for Sensing Rotational Velocity
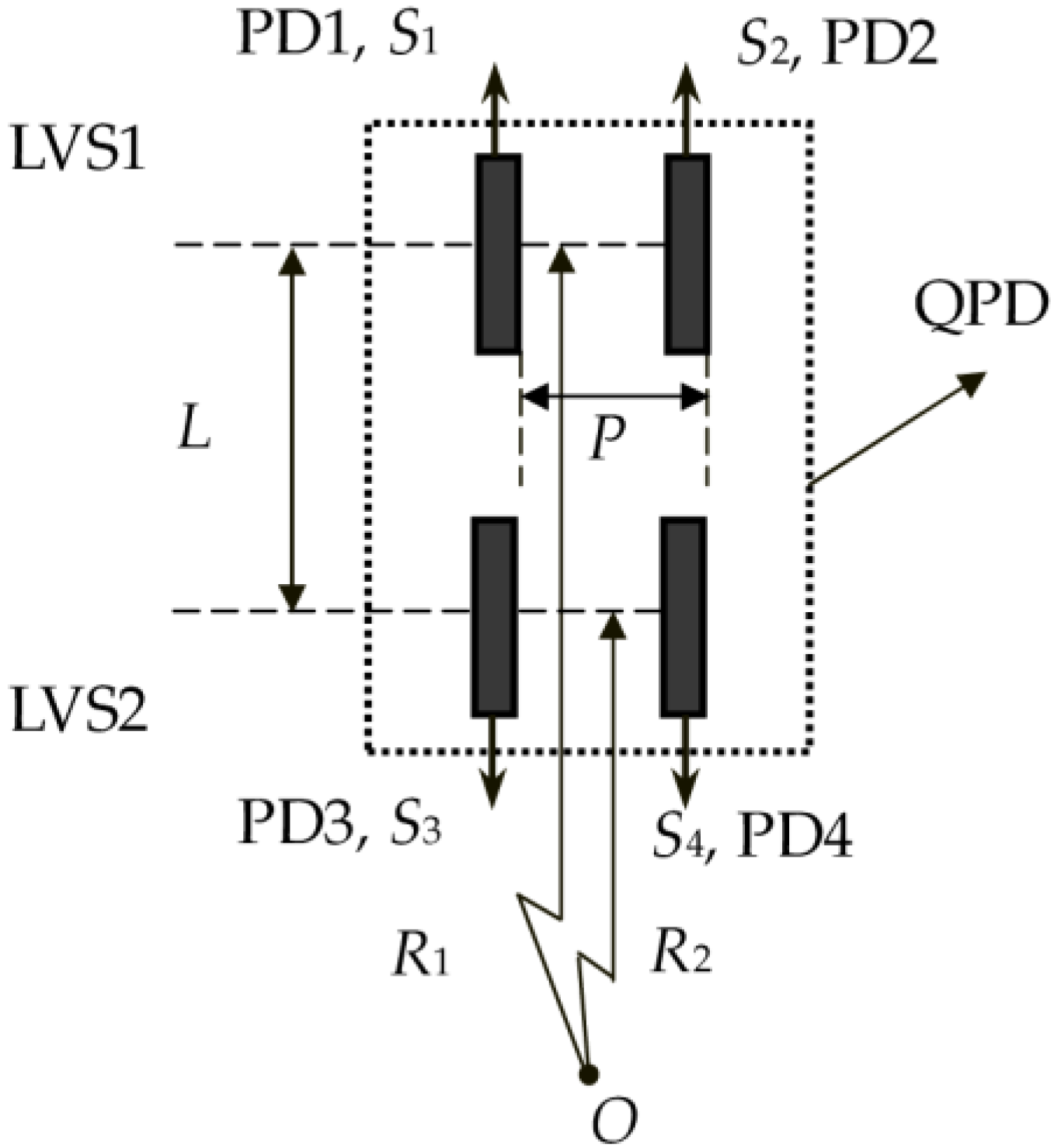
The quadrant photo-detector for sensing rotational- or angular-velocity, shown in
Figure 1, is formed by four photovoltaic cells PD1, PD2, PD3 and PD4. PD1 and PD2 are arranged in parallel each other with distance
P, which constitute a linear velocity sensor (LVS1), and output signals
S1 and
S2.
Similarly, PD3 and PD4 are also arranged in parallel each other with the distance P, which lead to another linear velocity sensor (LVS2), and output signals S3 and S4. The LVS1 and LVS2 are also aligned in parallel each other at the interval of L, and then form the QPD.
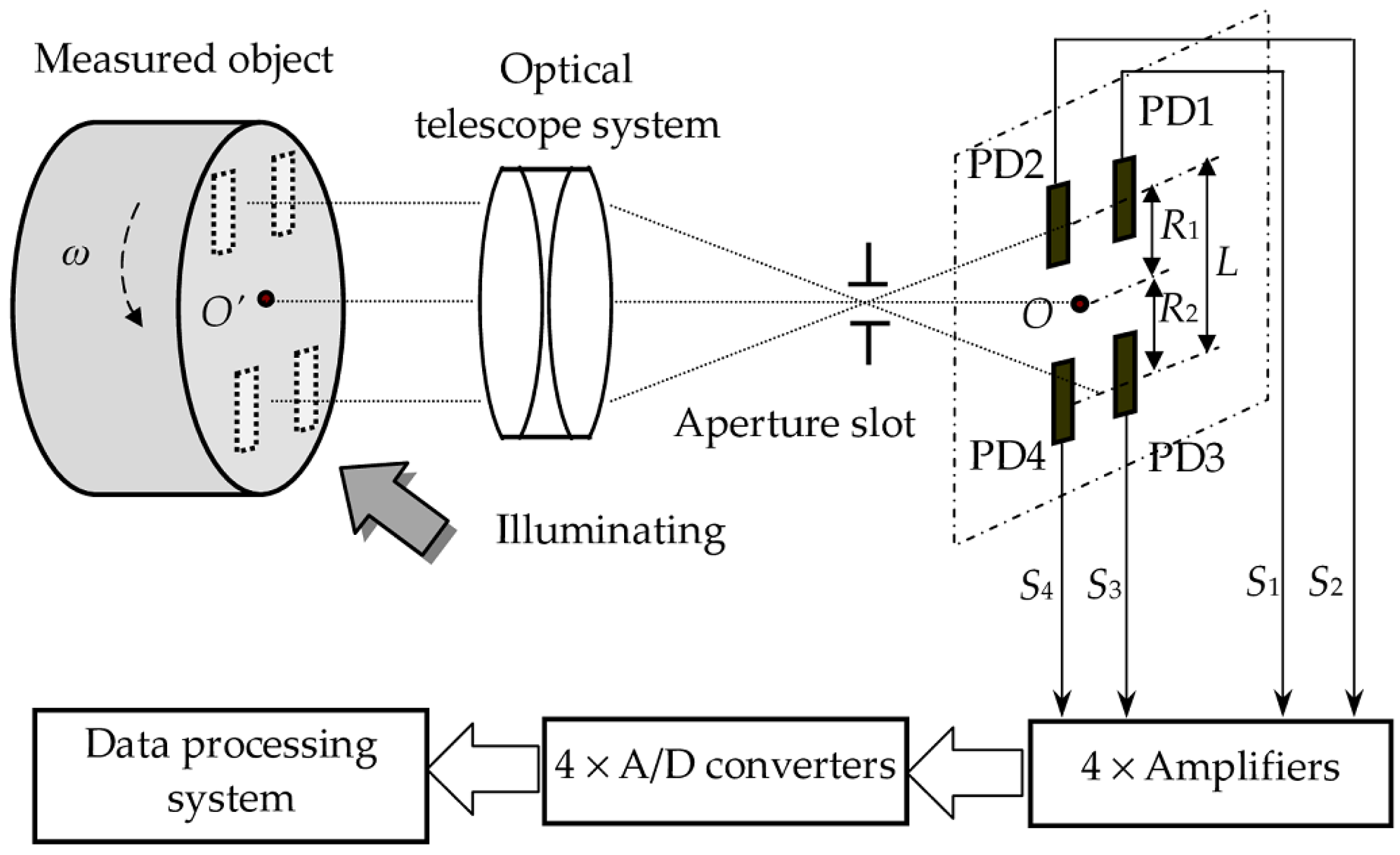
The rotational velocity sensing system with the QPD and the DSC algorithm is schematically illustrated in
Figure 2. Suppose the terminal plane of a measured object has a rough surface, and rotates around center
O’ with a rotational velocity ω. The surface of the terminal plane is imaged on the QPD through an optical telescope system with magnification
M. The image of the measured object rotates around center
O that is the imaged point of center
O’, and it must cover the QPD. Thus the size of the terminal plane must be at least larger than
L/
M. The distances of center
O to LVS1 and LVS2 are
R1 and
R2, respectively. The output signals of the QPD are random, owing to the stochastic reflection image of the terminal plane. The output signals
S1,
S2,
S3 and
S4 will go to the data processing system (DPS) after they are amplified and converted into digital signals. In the DPS, the DSC between
S1 and
S2 is calculated and noted as DSC1, which is related to the linear velocity of moving image on PD1 and PD2. The DSC between
S3 and
S4 is also obtained and denoted as DSC2, which indicates the linear velocity of moving image on PD3 and PD4. The rotational velocity ω of the measured object can be derived from the DSC1 and DSC2.
3. Principle of Evaluating Rotational Velocity with DSC
3.1. Image Velocity on QPD
Supposing that the terminal plane of measured object rotates around the
O’ in the rotational velocity of ω, the terminal plane and its imaged plane are depicted in
Figure 3a,b, respectively, which are viewed from the optical telescope system. LVS1’, LVS2’ and
O’ on the terminal plane are conjugated to LVS1, LVS2 and
O on the image plane, respectively.
In
Figure 3a,
D’
1 and
D’
2 are two arbitrary points on the central line of the LVS1’. The interval between
O’ and the central line of LVS1’ is
R’
1, and the distances of
O’ to
D’
1 and
D’
2 are
R’
D1 and
R’
D2, respectively. In
Figure 3b,
D1 and
D2 are the conjugate points of
D’
1 and
D’
2, respectively, thus the distances of
O to
D1 and
D2 are
RD1 =
MR’
D1 and
RD2 =
MR’
D2, respectively. With the rotational velocity of ω, the linear velocities at
D1 and
D2 are
VD1 = ω
MR’
D1 = ω
RD1 and
VD2 = ω
MR’
D2 = ω
RD2, respectively.
VD1 and
VD2 have the components
VD1 × cosα and
VD2 × cosβ, respectively, in the direction of LVS1, where α and β are the angles of
R1 relative to lines
OD1 and
OD2, respectively.
Meanwhile,
RD1 × cosα =
RD2 × cosβ =
R1, thus the image velocity
V1 on any point of the central line of the LVS1 can be obtained, such that:
Similarly, we can also get the image velocity
V2 on any point of the central line of the LVS2, governed by:
where
R2 is the interval between
O and the central line of LVS2. The image velocities
V1 and
V2 are insensitive to the variation of the amplification coefficient
M which has been hidden in
R1 and
R2 on the image plane.
3.2. Characteristics of Output Signals of QPD
When a light source illuminates the terminal plane of the measured object that has a rough surface with finite and stochastic reflection, some light rays will be scattered by the rough surface, and then be imaged on the QPD through the optical telescope system with a high cut-off frequency in the spatial domain. The image on the QPD locating the image plane is randomly distributed, and has a wide spatial bandwidth. The output signal of each photovoltaic cell in the QPD is the integration of the randomly-reflected light intensity on its active area, which is also stochastic. Thus the QPD outputs four stochastic signals that are related to the random distribution of the rotating image, and the relations among the QPD output signals are involved with the image movement decided by the rotation of the terminal plane.
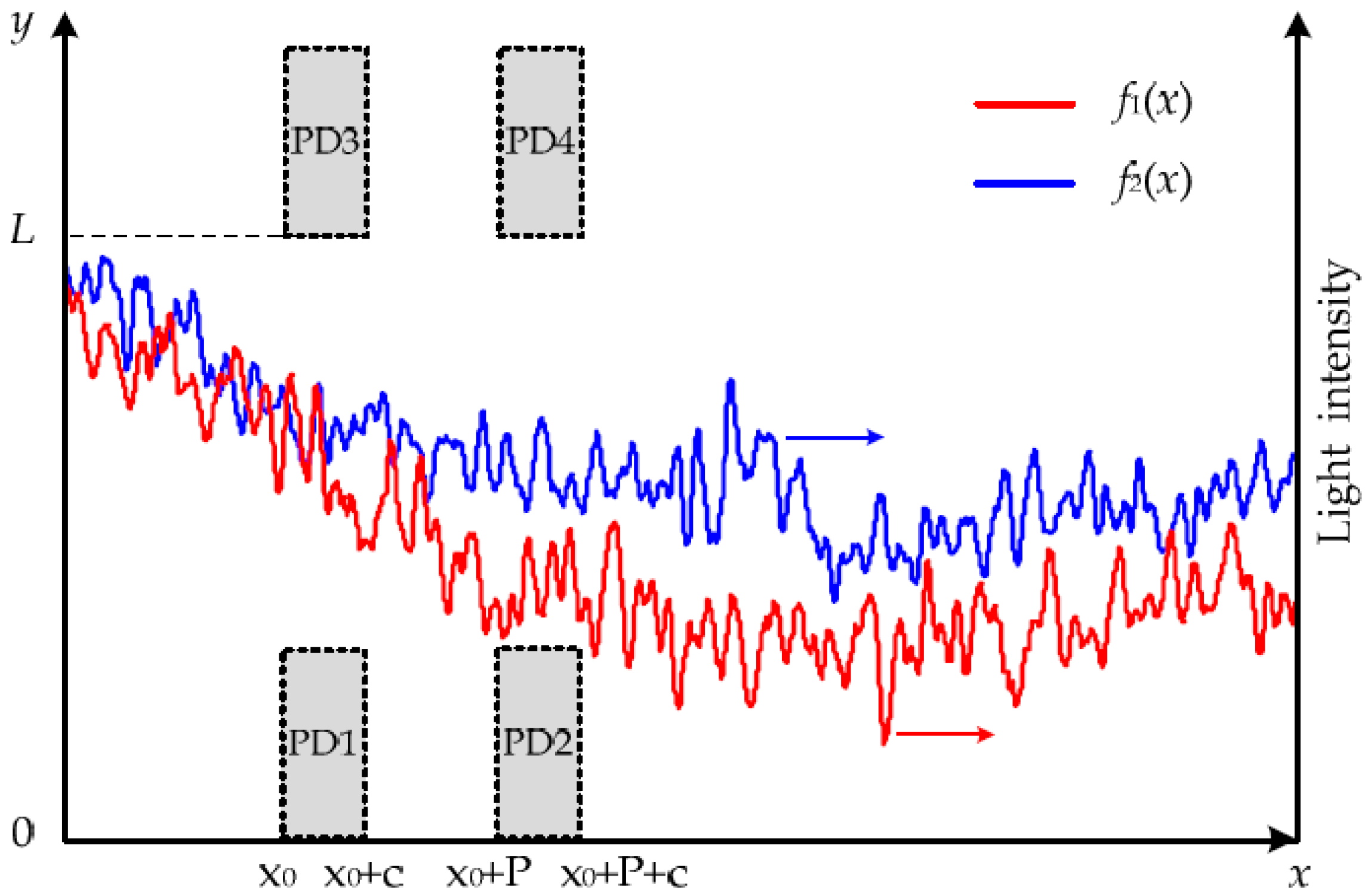
It is assumed that the central lines of LVS1 and LVS2 are
x-axes that are parallel with PD1–PD2 and PD3–PD4, respectively.
Figure 4 shows schematically the stochastic light-intensity distributions on the active areas of the QPD whose PD1–PD4 positions are also indicated in
x-
y coordinate, where
f1(
x) and
f2(
x) are the examples of actual light-intensity distributions along the LVS1 and the LVS2, respectively,
x0 is the
x-axial position of PD1 and PD3,
c is the width of the photovoltaic cells.
If only considering x-axial movement, the integration of the y-axially distributed random light at x-position can be taken as the whole light intensity at x-position, which ignores the y-axial factor and still is a stochastic distribution on the x-axis, shown as f1(x) or f2(x). When the rough surface of a measured body is imaged on the QPD, the QPD will be illuminated by the randomly distributed light that is regarded as only an x-axial distribution, and the output signals of the PD1–PD4 are the integrations of the light intensity distributions f1(x) or f2(x) in the x-axial widths of the PD1–PD4, respectively. If the measured body is rotating, its scattering light will be randomly changed, and then the QPD will output signals S1, S2, S3 and S4 that are stochastic in time domain.
If the LVS1 (PD1) is at position
x0, its output signals
S1 and
S2 will be the integrations of
f1(
x) in the regions of PD1 and PD2, respectively, and they have the relation
S2(
x0) =
S1(
x0 −
P). If the image on the LVS1 is moving in the image velocity
V1, then the space-time relation
x0 =
V1t allows
S1(
x0) and
S2(
x0) to become time-domain signals
S1(
t) and
S2(
t), described by:
The active-area factor of the photovoltaic cells cannot be ignored, thus the integrations in
S1(
t) and
S2(
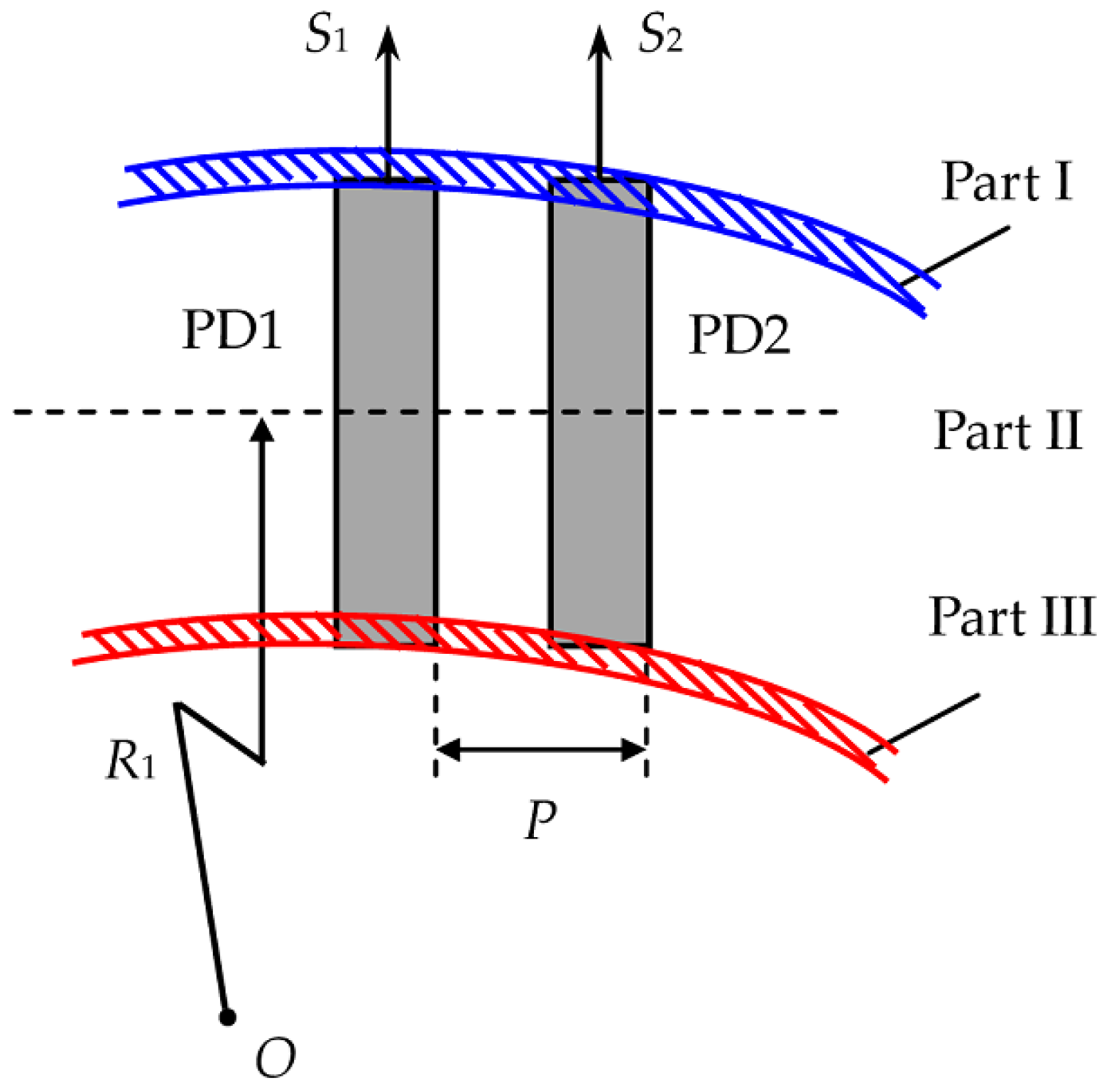
t) will filter some high-frequency components of the light intensity distributions on PD1 and PD2, which actually function as low-pass filters that can remove much relevant characteristic information. When the measured object revolves around
O’, its image on PD1 and PD2 can be divided into three parts: I, II and III, as illustrated in
Figure 5.
Part I and Part III are labeled by blue slanted lines and red slanted lines, respectively, and Part II is the region between Part I and Part III. Part II with the largest area makes principal contribution to
S1(
t) and
S2(
t), and Parts I and III can be ignored because of their much less contributions. On other hand, the image of Part II on PD1 will be on PD2 after the delay time τ
1 =
P/
V1. Thus Equation (3) indicates that
S2(
t) is approximately equal to the temporally delayed signal of
S1(
t) with the delay time of τ
1, which can be written as:
where τ
1 > 0 represents the movement direction from left to right, and τ
1 < 0 represents that from right to left. Once τ
1 is ascertained, the image velocity
V1 on the LVS1 will be determined by:
Like the analogous
S1(
t) and
S2(
t),
S4(
t) is also approximately equal to the temporally delayed signal of
S3(
t) with the delay time of τ
2, which is expressed to be
S4(
t) ≈
S3(
t − τ
2) where τ
2 =
P/
V2 is the time delay of
S3(
t). τ
2 > 0 also indicates the movement direction from left to right, and τ
2 < 0 indicates that from right to left. Once τ
2 is obtained, the image velocity
V2 on the LVS2 will be also calculated with:
Based on the above descriptions, we can establish the features of the temporal output signals of the QPD: (1) they are random, corresponding to the spatially-stochastic reflection of the terminal plane; (2) the signals S2(t) and S4(t) are approximately interrelated to S1(t) and S3(t), respectively; (3) some high-frequency information consisting of more useful characteristics has been filtered, which is a disadvantage to correlation analysis. If the delay times τ1 and τ2 are obtained, Equations (5) and (6) may let the rotational velocity ω be calculated. According to the abovementioned features, the DSC algorithm is exploited to derive the delay times from the output signals.
3.3. Differential Subtraction Correlation
The output signals of the QPD are random and correlative, thus we also employ correlation analysis to calculate τ
1 and τ
2. However the conventional correlation method is low efficient, due to its multiplication operations with the complexity of about O(3
Nlog
2N) or O(
N2), where
N is the number of sampling data. In order to fast and exactly determine the delayed time, we propose the DSC to analyze the correlation ϕ
1(τ) between
S1(
t) and
S2(
t), defined as:
where
T1 and
T2 are the start time and end time, respectively, of the integration. In practice,
S1(
t) and
S2(
t) are converted into digital signals
s1(
n) and
s2(
n), respectively, by using a multi-channel A/D converter with sampling interval
T0. Thus the DSC ϕ
1(τ) is discretized into Φ
1(
m) (
i.e., DSC1) as:
where
N1 =
T1/
T0,
N2 =
T2/
T0 and
m = τ/
T0 are integral. If
S2(
t) =
S1(
t − τ
1), Φ
1(
m) will go to zero at
m =
m1 = τ
1/
T0, and is much more than 0 at other
m, where
m1 is an integer representing the temporal delay τ
1.
Similarly, the output signals
S3(
t) and
S4(
t) of the LVS2 are converted into digital signals
s3(
n) and
s4(
n), respectively, with the same sampling interval
T0. Then
s3(
n) and
s4(
n) are sent to the DPS to calculate the discrete DSC Φ
2(
m) (
i.e., DSC2) between
s3(
n) and
s4(
n), given by:
If S4(t) = S3(t − τ2), Φ2(m) will also go to zero at m = m2 = τ2/T0, and is much more than 0 at other m, where m2 is an integer representing the temporal delay τ2.
In practice, the output signals of the QPD in this rotational velocity sensing system have the relations S2(t) ≈ S1(t − τ1) and S4(t) ≈ S3(t − τ2), which let Φ1(m) and Φ2(m) go to the minimums at m = m1 and m = m2, respectively, and they are much more than 0 at other m. Based on Equations (8) and (9), the DSC algorithm is then described as follows:
(1) Acquiring s1(n), s2(n), s3(n) and s4(n) by discretizing the output signals of the QPD with synchronous four-channel A/D converter;
(2) Calculating the DSC1 and DSC2 at different m, according to Equations (8) and (9) with s1(n), s2(n), s3(n) and s4(n);
(3) Searching the minimums of Φ1(m) and Φ2(m), and taking the serial numbers at the minimums of Φ1(m) and Φ2(m) as the temporal-delay numbers m1 and m2, respectively.
The temporal-delay numbers m1 and m2 have indicated the delay times τ1 and τ2, respectively. The proposed DSC algorithm just requires subtraction, absolute and addition operations without any multiplications or divisions, so it can facilitate the fast correlation calculation of two random signals. Furthermore, its difference operation between two adjacent data can recover high-frequency components, and can eliminate low-frequency noise and shift, and then can enlarge the differences between adjacent data, which are advantageous to improve accuracy.
3.4. Evaluation of Rotational Velocity
According to the DSC algorithm described before,
m1 and
m2 can be derived from Φ
1(
m) and Φ
2(
m) by searching the minima of Φ
1(
m) and Φ
2(
m), respectively. Because τ
1 =
m1T0 and τ
2 =
m2T0,
m1 > 0 and
m2 > 0 indicate the image movement directions from left to right on the LVS1 and the LVS2, respectively, and
m1 < 0 and
m2 < 0 indicate that from right to left on the LVS1 and the LVS2, respectively. Thus Equations (1), (2), (5) and (6) lead to the relations of the rotational velocity ω with
m1 and
m2, governed by:
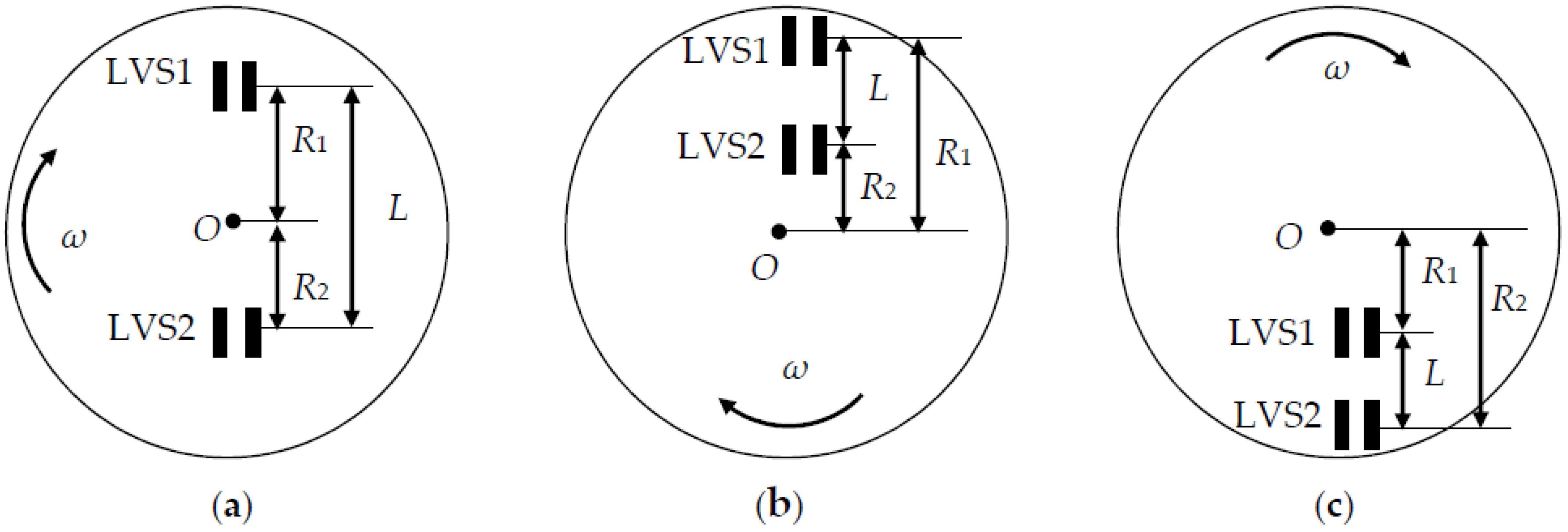
Now let us suppose that the LVS1 is above the LVS2. The location of the rotational center
O on the image plane may be between the LVS1 and the LVS2, below both the LVS1 and the LVS2, or above both the LVS1 and the LVS2, as shown in
Figure 6a–c, respectively.
The signs of
m1 and
m2 represent the image movement directions on the LVS1 and LVS2, which can be used for judging the rotational center locations and directions. In
Figure 6a, the sign of
m1 is always different from that of
m2, and
m1 > 0 and
m1 < 0 demonstrate the clockwise rotational direction and the counter-clockwise one, respectively. In
Figure 6b,c, the sign of
m1 is always the same as
m2, and their rotational center locations can be discriminated by comparing
m1 to
m2, where |
m1| < |
m2| and |
m1| > |
m2| as indicated in
Figure 6b,c, respectively, owing to the fact
R2 ±
L =
R1. In
Figure 6b,
m1 > 0 and
m1 < 0 illustrate the clockwise rotational direction and the counter-clockwise one, respectively. In
Figure 6c,
m1 < 0 and
m1 > 0 mean the clockwise rotational direction and the counter-clockwise one, respectively. At the same time,
Figure 6a–c have shown
R1 +
R2 =
L,
R1 −
R2 =
L with |
m1| < |
m2|, and
R2 −
R1 =
L with |
m1| > |
m2, respectively, from which we can derive the rotational velocity ω as (1/
m1 − 1/
m2)
P/(
LT0) by using Equations (10) and (11). The sign of ω is the same as that of
m1 in the cases of
Figure 6a,b, and is opposite that of
m1 in the case of
Figure 6c, which shows that ω > 0 and ω < 0 always represent the clockwise rotational direction and the counter-clockwise one, respectively. Thus in all cases of different directions and centers, the sign of ω always indicates the rotational direction, and the rotational velocity ω can be determined by:
Note that |m1| and |m2| are not equal to 0 in Equation (12), and must be less than N at least in the DSCs. In practice, they should be less than N/2, in order to accurately acquire them. Thus the better range of the rotational velocity calculated with Equation (12) should be from 2P/(NT0Rmin) to P/(T0Rmax), where Rmin = min(R1, R2) and Rmax = max(R1, R2).
The relations of ω with
m1,
m2, rotational center location and direction are listed in
Table 1. The rotational velocity ω calculated with Equation (12) includes the amplitude and direction of the rotational velocity on the image plane, which is corresponding to the rotational velocity of the measured object. Therefore once
m1 and
m2 are obtained, the rotational velocity consisting of its amplitude and direction will be calculated by only using Equation (12).
4. Experimental Calculations
The rotation of a planar wooden disk with rough surface is taken as an example to confirm the validity of the proposed method for remotely sensing rotational velocity. The confirmation can be realized according to the following steps: (1) The wooden disk is installed on the shaft of a DC-micromotor (Model 2230G0003, Faulhaber GmbH & Co. KG, Schönaich, Germany) which drives the rotation of the disk. The angular speed of the DC-micromotor is controlled by the output voltage of an adjustable DC regulated power supply (Model APS3005S-3D, Atten Technology Co., Shenzhen, China); (2) The rotational velocity of the wooden disk is set by adjusting the output voltage and then measuring the rotational velocity with a DT-2234B Digital Tachometer (Suwei Co. Ltd., Guangzhou, China); (3) Sunlight or very bright white LEDs illuminate the wooden disk whose surface is imaged on a QPD through a telecentric imaging system (telescope) with magnification of 1×. The telecentric imaging system includes an adjustable aperture and two composite objectives with a focal length of ~26 mm. The QPD is constructed by four identical photovoltaic-cells with the active area of 0.89 × 4.39 mm2, where two photovoltaic cells of each linear velocity sensor (LVS1/LVS2) directly come from two adjacent pixels of a Si-based photovoltaic-cell array (Model A5V-38, OSI Optoelectronics Inc., Hawthorne, CA, USA), and then the LVS1 and LVS2 form the QPD. Other parameters of the QPD are as follows: P = 0.99 mm and L = 16 mm; (4) The output signals of the QPD are amplified and then converted into discrete data by four A/D converters with the sampling interval of T0 = 0.2 ms. The amplifier and the A/D converter are INA128 (Texas Instruments Inc., Dallas, TX, USA) and AD7663 (Analog Devices Inc., Norwood, MA, USA) with 16-bit resolution, respectively; (5) The discrete data are sent to a DPS, in which Φ1(m) and Φ2(m) are calculated, and their minimums are searched to get m1 and m2. Then the rotational velocity ω is calculated with Equation (12); (6) Finally, we compare the calculated value and direction to the given ones, and judge whether they are agree with each other.
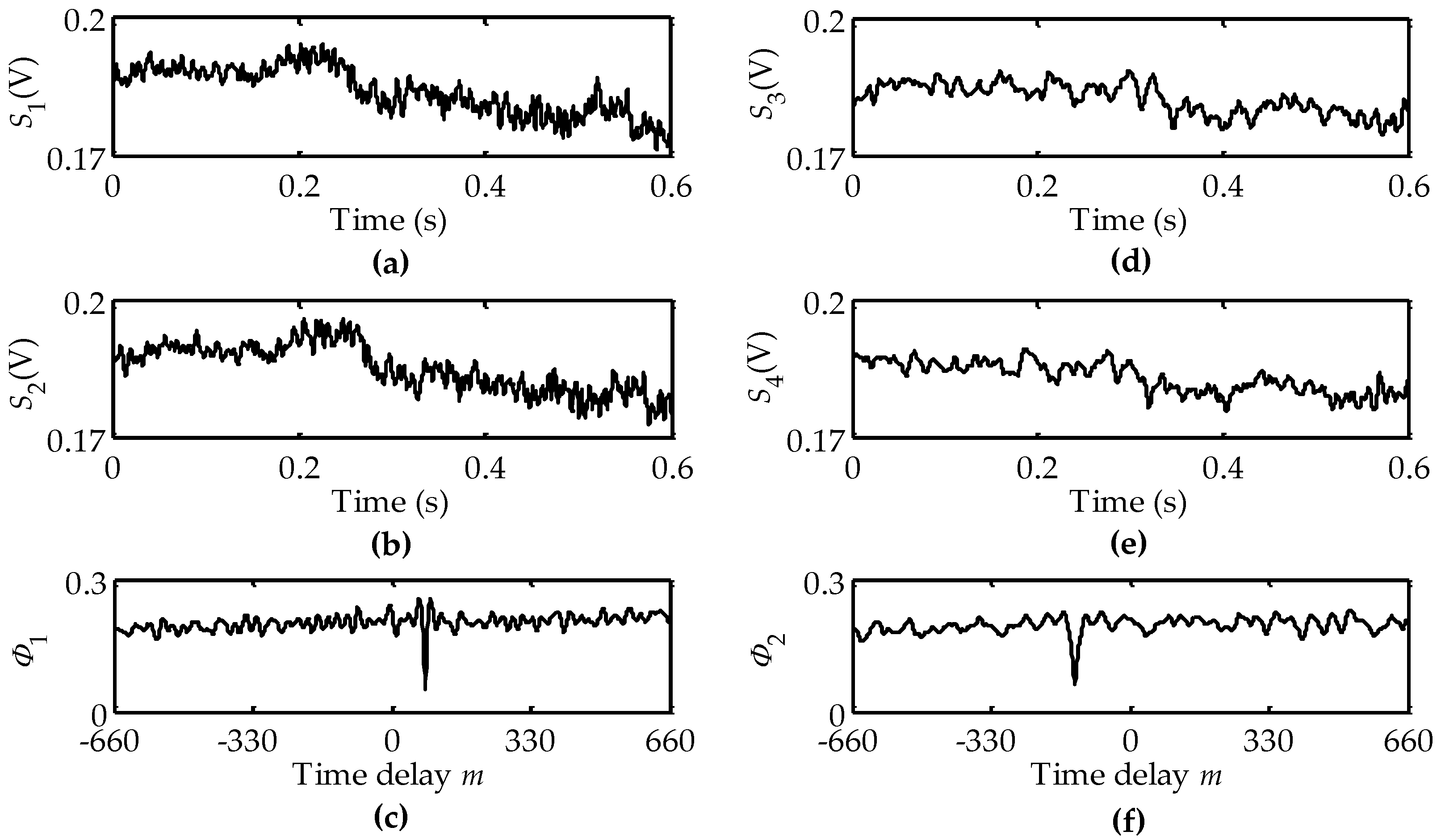
When the wooden disk was rotated at a rotational velocity of 6.3 rad/s in the clockwise direction, we located the rotational center
O, whose distance to its closest LVS was ~6 mm, to be between the LVS1 and the LVS2. The output signals
S1(
t),
S2(
t),
S3(
t) and
S4(
t) of the QPD are shown in
Figure 7a,b,d,e, respectively.
Figure 7c,f illustrate the calculated Φ
1(
m) and Φ
2(
m), respectively. The minima of Φ
1(
m) and Φ
2(
m) were searched at
m1 = 79 and
m2 = −131, respectively. According to Equation (12), the calculated rotational velocity was 6.278 rad/s with the “+” sign that represents the clockwise direction. These results demonstrate that the calculated value and direction of the rotational velocity agree with the given ones.
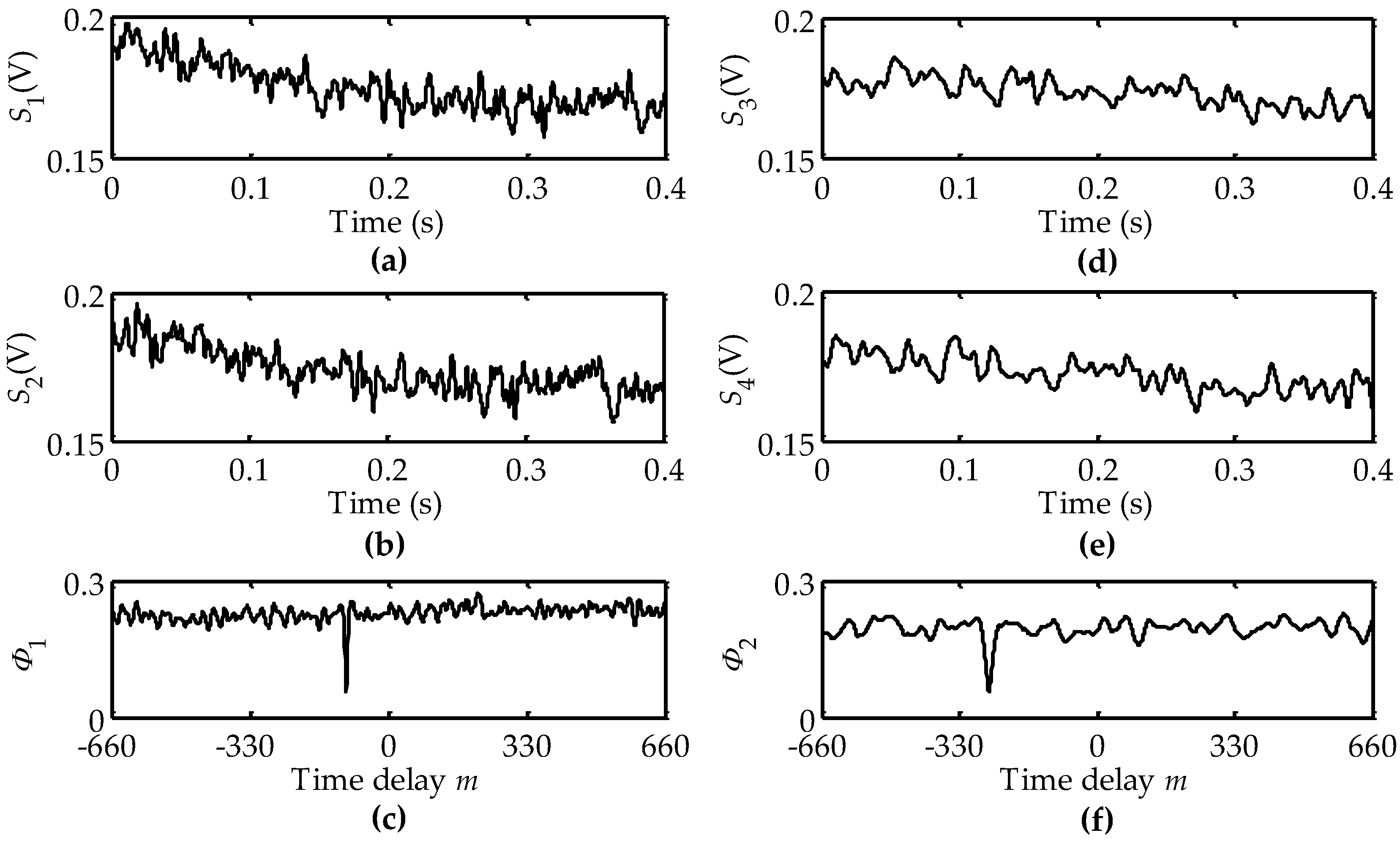
When the wooden disk rotated counter-clockwise at a rotational velocity of 1.9 rad/s, we let the rotational center
O, whose interval to its nearest LVS was ~10 mm, be below both the LVS1 and the LVS2. The output signals
S1(
t),
S2(
t),
S3(
t) and
S4(
t) are exhibited in
Figure 8a,b,d,e, respectively.
Figure 8c,f plot the calculated DSCs Φ
1(
m) and Φ
2(
m), respectively, from which we derived
m1 = −100 and
m2 = −260. Based on Equation (12), the calculated rotational velocity was −1.904 rad/s whose “−” sign indicates the counter-clockwise direction. The calculated rotational velocity including its amplitude and direction is also in agreement with the given one. Similarly, we performed the corresponding experimental calculations in the cases of other rotational directions and center locations, where the calculated rotational velocities were also in agreement with their given ones.
The abovementioned calculations had a relative amplitude error of ~0.3%. Their resolutions were up to 0.011 rad/s, and their optimal resolution was 5.4 × 10
−5 rad/s (
N = 4800). The resolution and its optimum of the DSC-based rotational velocity are actually determined by
P/(
LT0m1m2) and 4
P/(
LT0N
2), respectively, which are related to the sampling interval
T0 and the rotational velocity. For measuring super-low rotational velocities, the resolution can be improved to be excellent by increasing the sampling interval in the case of guaranteeing enough precision. In other often used methods, the resolution of laser gyroscopes can reach 0.01°/h~10°/h [
4], and the TCC-based method has a relative error of 3.33% [
12]. The marking method with an optical label plus quadrant photodiode possesses a relative error of 0.001% [
24], while it measures only the average rotational velocity within the angular displacement of 2π rad. The circular-grating-based methods with Moiré optical grating and capacitive grating have relative errors of ~0.07% and 0.44%, respectively [
30]. Compared to the existing method, the DSC-based method proposed has mid-ranking resolution and accuracy, whereas on the plus side, it does not require installing any standard division disk.
To verify the computational speed, the DSC-based and TCC-based calculations were performed in an Acer PC system equipped with an Intel dual-core i3-processer plus 3.4 GHz, OS Windows 10 and Matlab 2010. The DSC-based calculations needed average times of 141 ms and 86 ms in the cases of N = 4800 and N = 3600 data numbers, respectively, and the TCC-based ones consumed on average times of 158.92 s and 72.849 s, correspondingly. These achievements imply that the DSC-based computational speed has been improved up to 1127 times that of the TCC-based one in the case of a data number N > 4800. Thus the DSC-based calculation for rotational velocity is very fast and accurate, and is not affected by the movement and alignment error of the QPD relative to the measured object, making it fit for remotely evaluating transient angular-velocities. These features are due to the following reasons: (1) (1/m1 − 1/m2) always makes |R1 ± R2| equal to constant L, in the cases of arbitrary rotational center, eccentricity, radial fluctuation or parallel movement; (2) the amplification coefficient M has been hidden in R1 and R2 on the image plane, which leads to the insensitivity to various M changed by alignment error and axial shaking; (3) V1 ± V2 is always not related to eccentricity, parallel movement and radial shift. Thus the rotational velocity calculated with Equation (12) is only determined by pure rotation, which has much fewer error sources.
5. Conclusions
The method of remotely evaluating rotational velocity has been presented in this paper, where the rotational velocity is derived from the temporally-delayed serial-numbers at the minima of two DSCs that are calculated with the four stochastic output signals of the QPD formed by four identical photovoltaic-cells, and the sign of the rotational velocity represents the rotational direction. The DSC algorithm is implemented by differentiating and subtracting the random output signals of two photovoltaic cells, and then integrating the absolute value of the differential subtraction signal. In the DSC algorithm, the rough surface and random reflection of measured object will have a contribution to precisely determining the temporal delay and rotational velocity, owing to its difference operation. Experimental calculations were performed to confirm the proposed evaluation method. The calculated rotational velocities, including their amplitudes and directions, were in excellent agreement with their given ones, which possessed an amplitude error of ~0.3%, and had over 1100 times the TCC-based efficiency in the case of data number N > 4800.
The proposed evaluation method works without any circular indexing plate, and its DSC does not require any multiplication or division operations. At the same time, this method is insensitive to the radial fluctuation, axial shift, eccentricity and parallel movement of the measured object that has assembly or mismatch errors. The rotational velocity calculated with Equation (12) is only determined by pure rotation, which has many fewer error sources. Comparing to the SF method, this evaluation method does not require calculating central frequencies, center position and extra direction, and it can simultaneously determine the amplitude and direction of a measured rotational velocity. In general, the proposed method is simple, fast, accurate and effective for remotely evaluating transient rotational velocities.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}