
An Improved Gaussian Mixture Model for Damage Propagation Monitoring of an Aircraft Wing Spar under Changing Structural Boundary Conditions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Improved GMM-Based Damage Propagation Monitoring Method
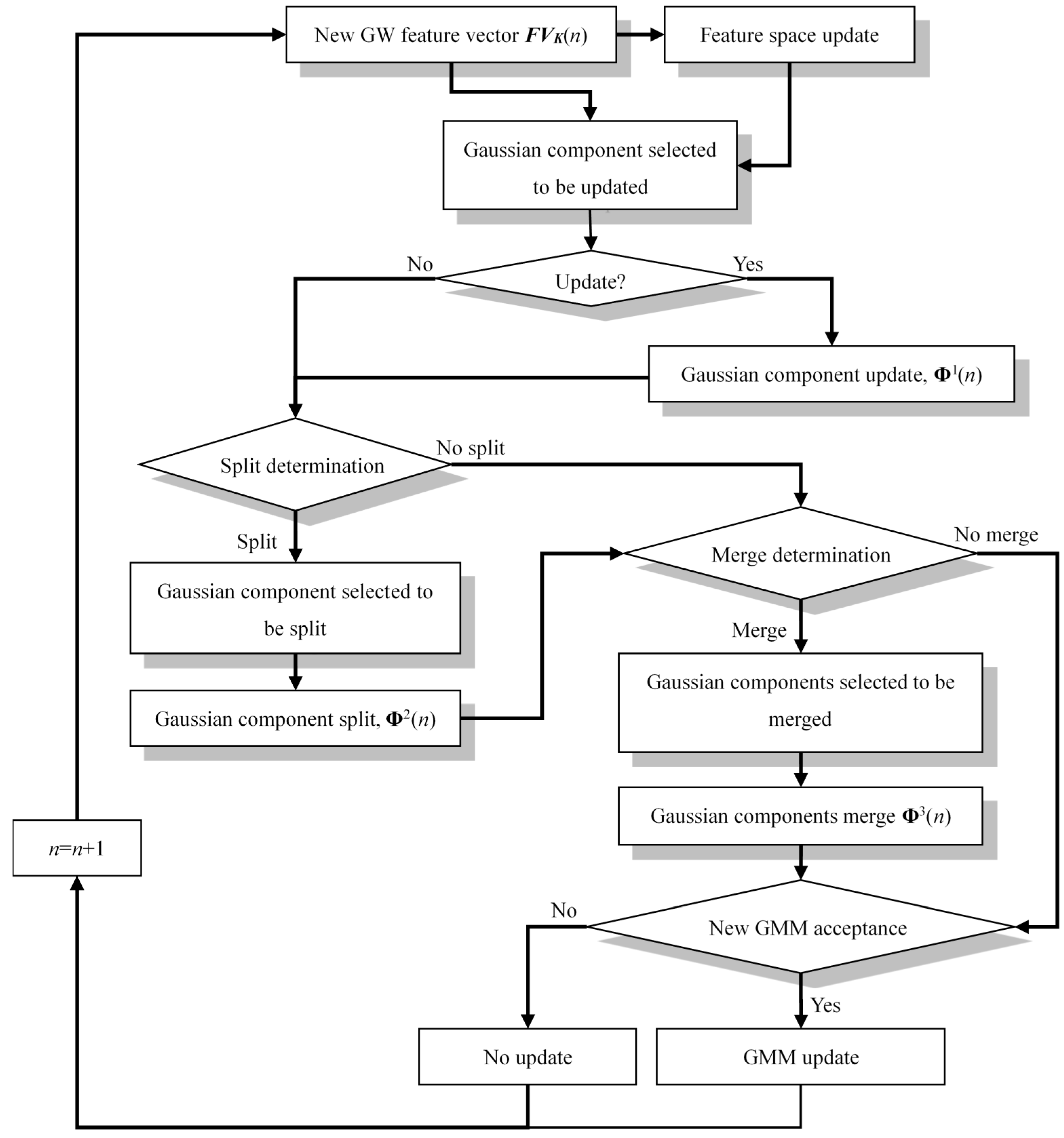
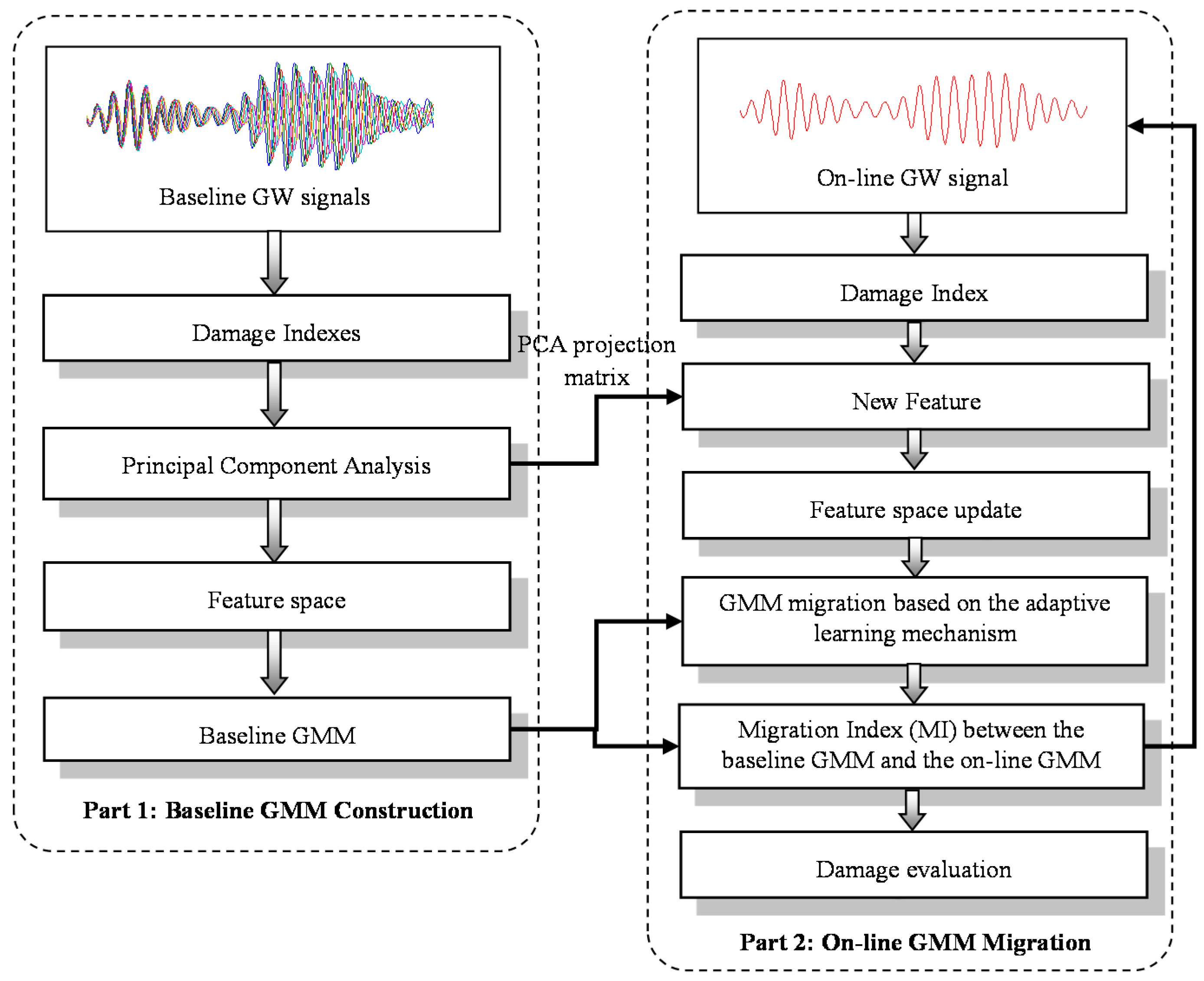
2.1. Method Principle and Implementation Architecture
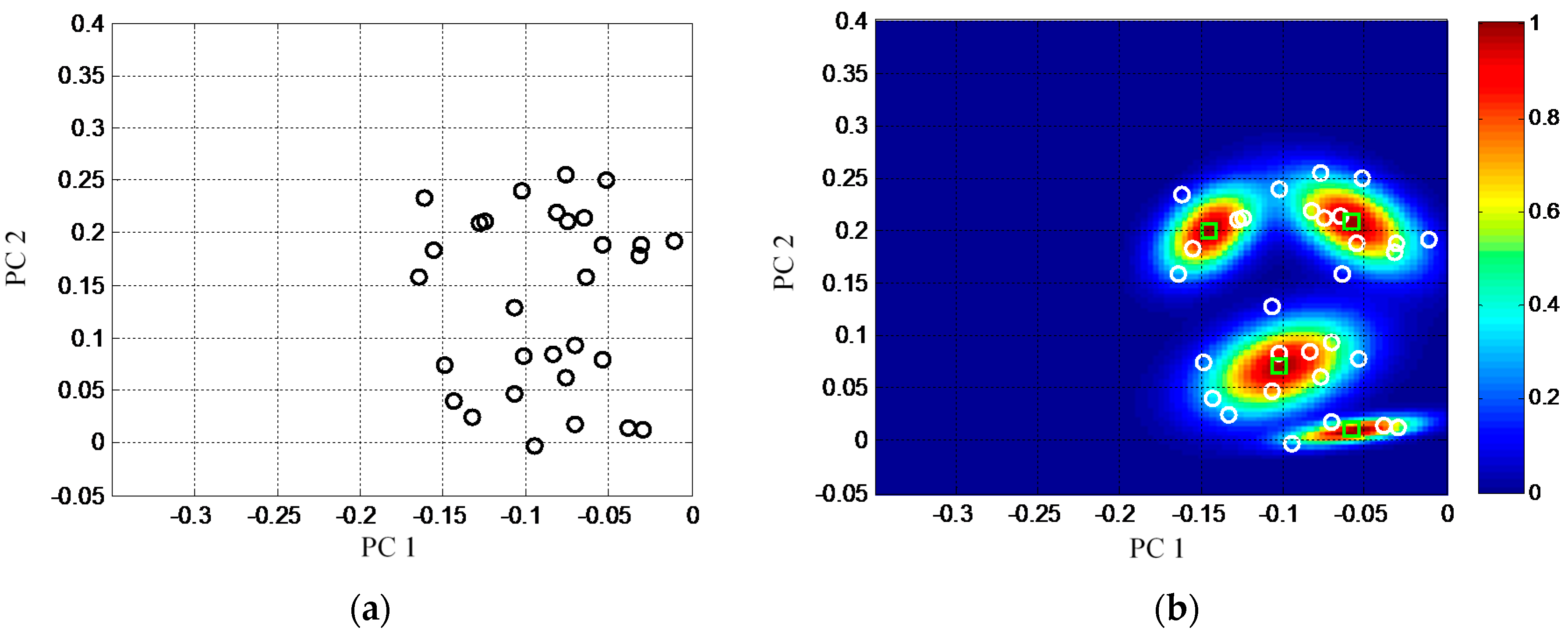
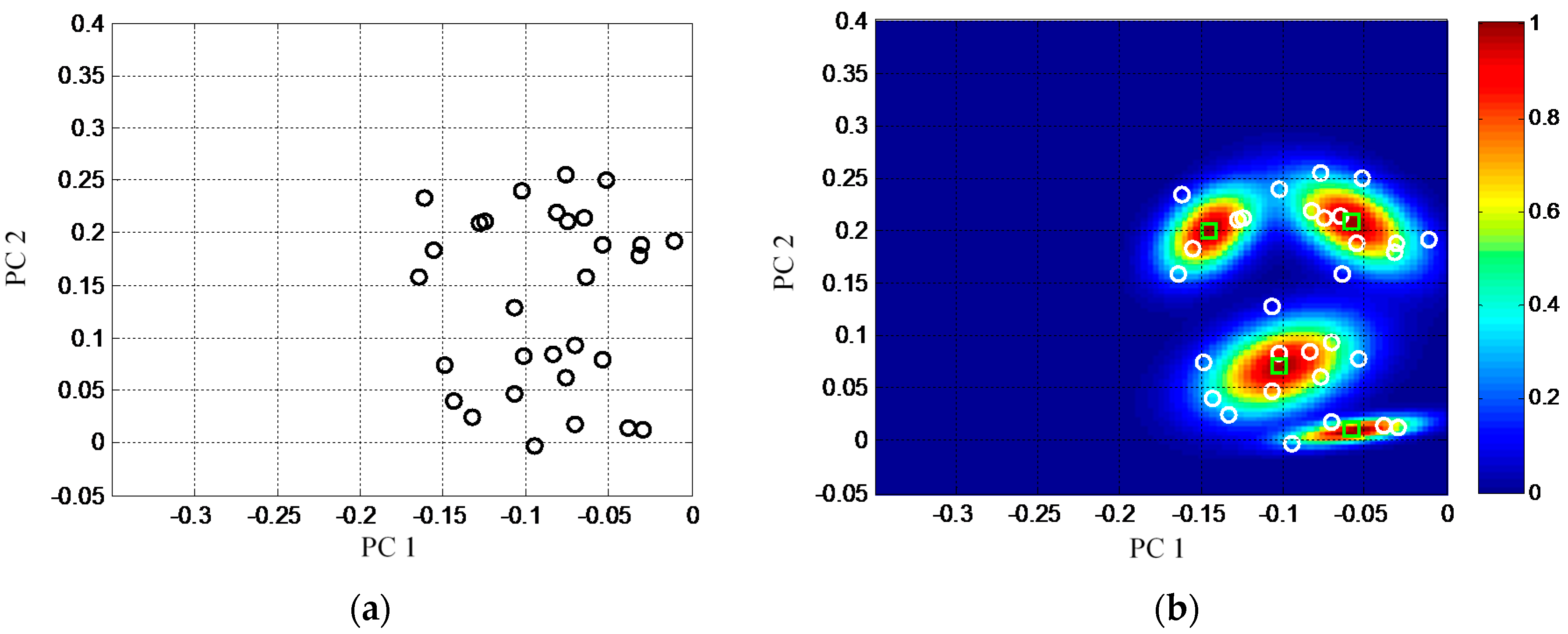
2.2. Baseline GMM Construction
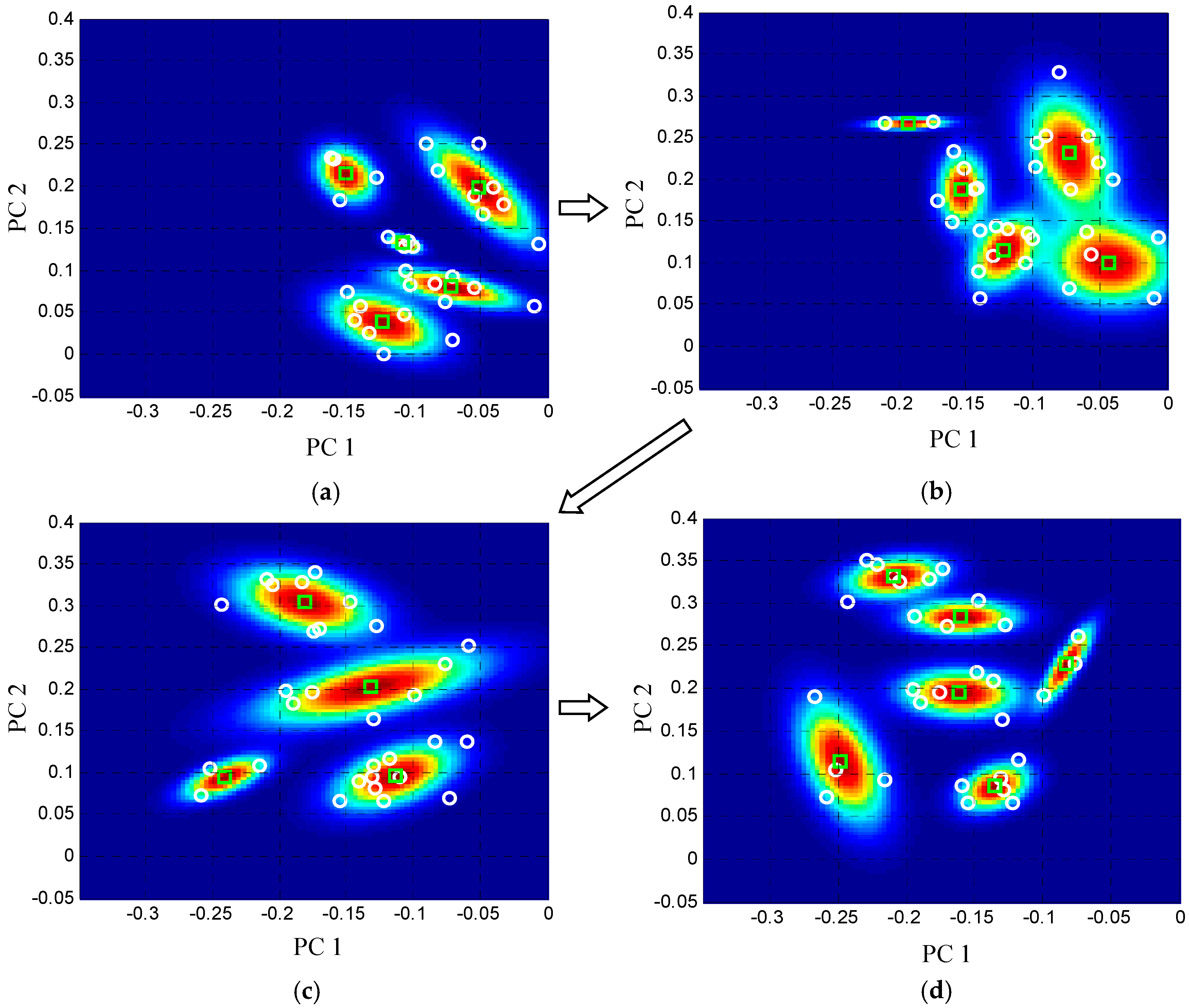
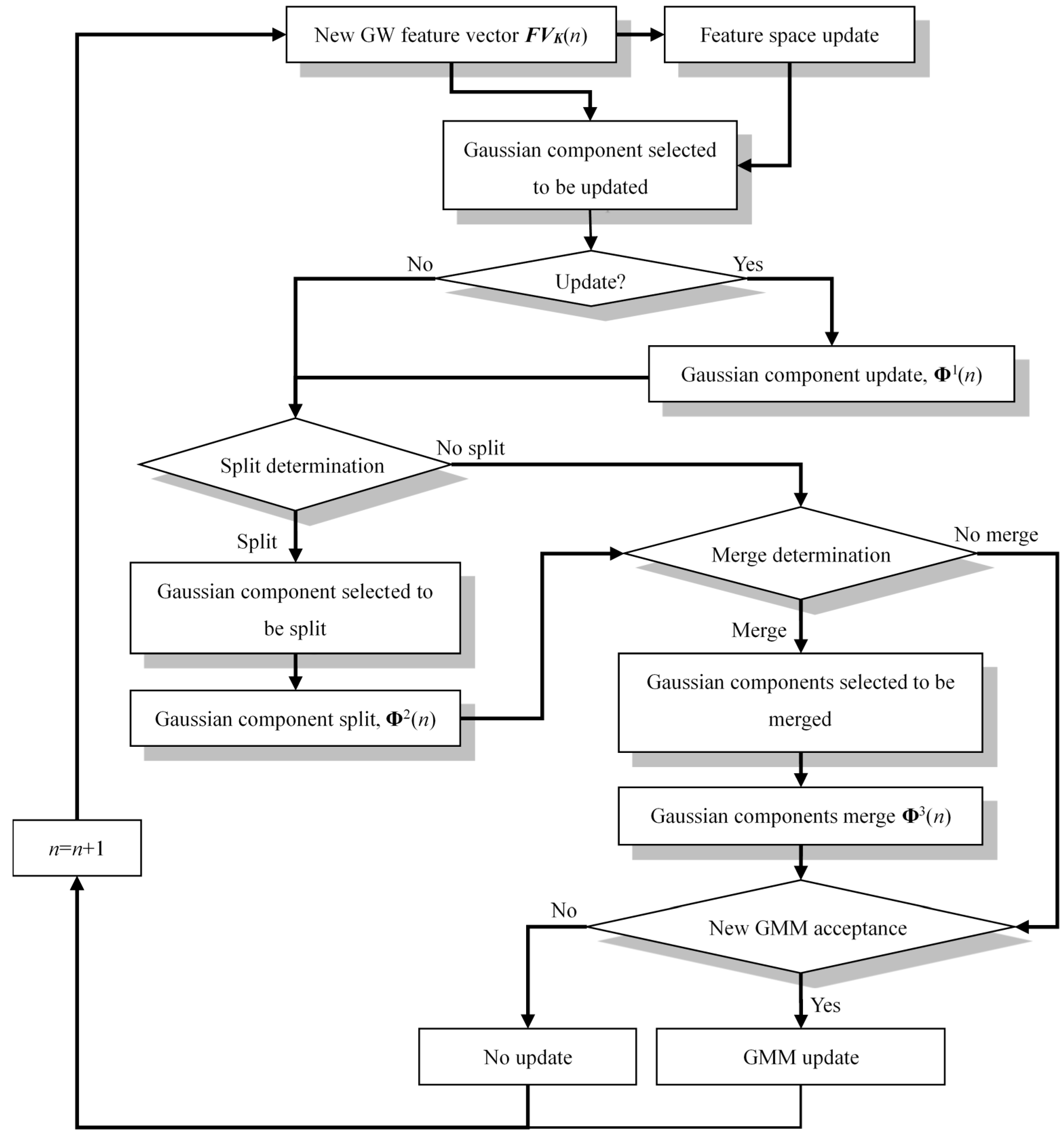
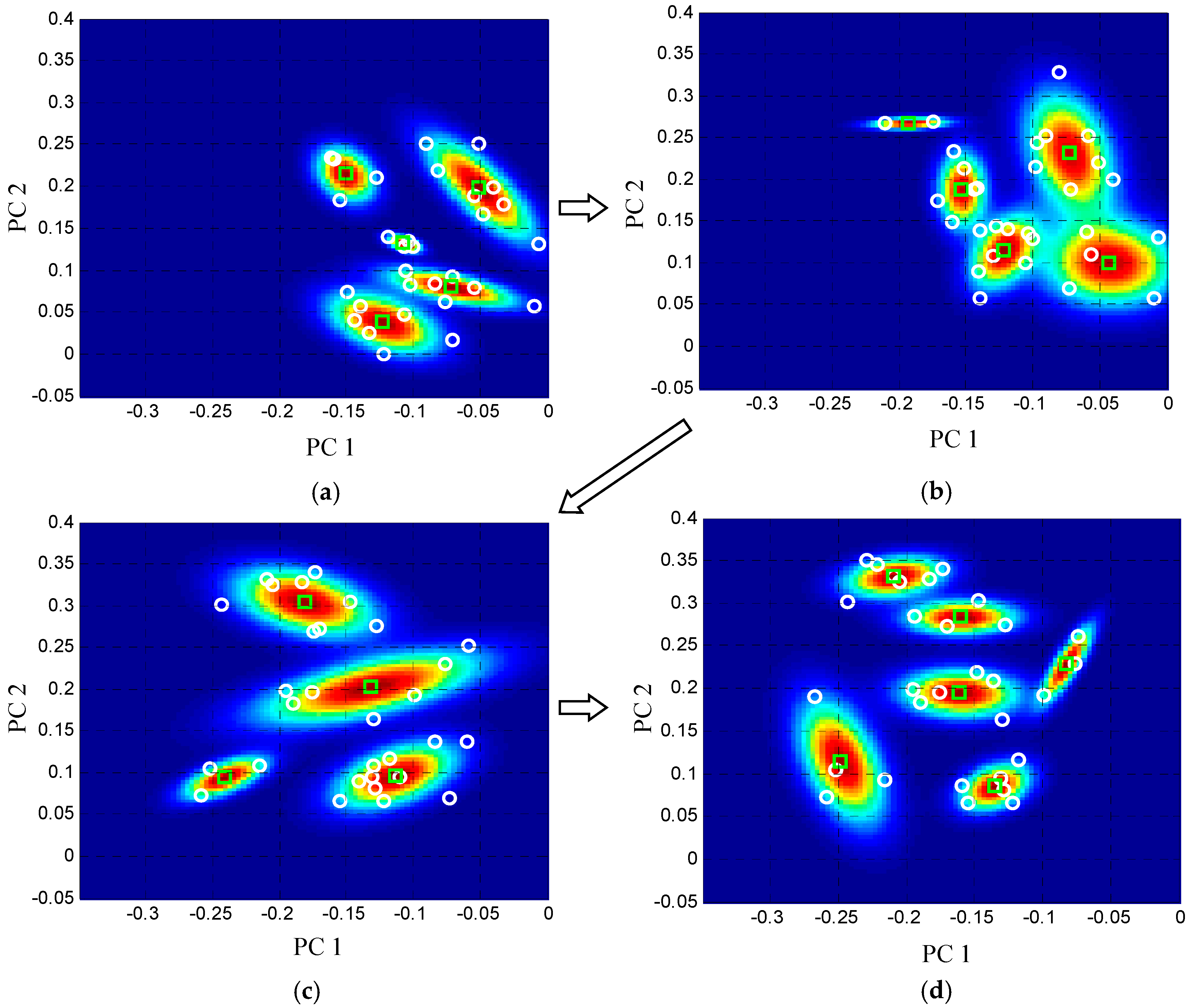
2.3. On-Line Adaptive Migration of the GMM
- (1)
- If split and merge operation are not performed, Φ(n) = Φ1(n).
- (2)
- If only split operation is performed, Φ(n) = Φ2(n).
- (3)
- If only merge operation is performed, Φ(n) = Φ3(n).
- (4)
- If split and merge operation are both performed, Φ(n) = Φ3(n).
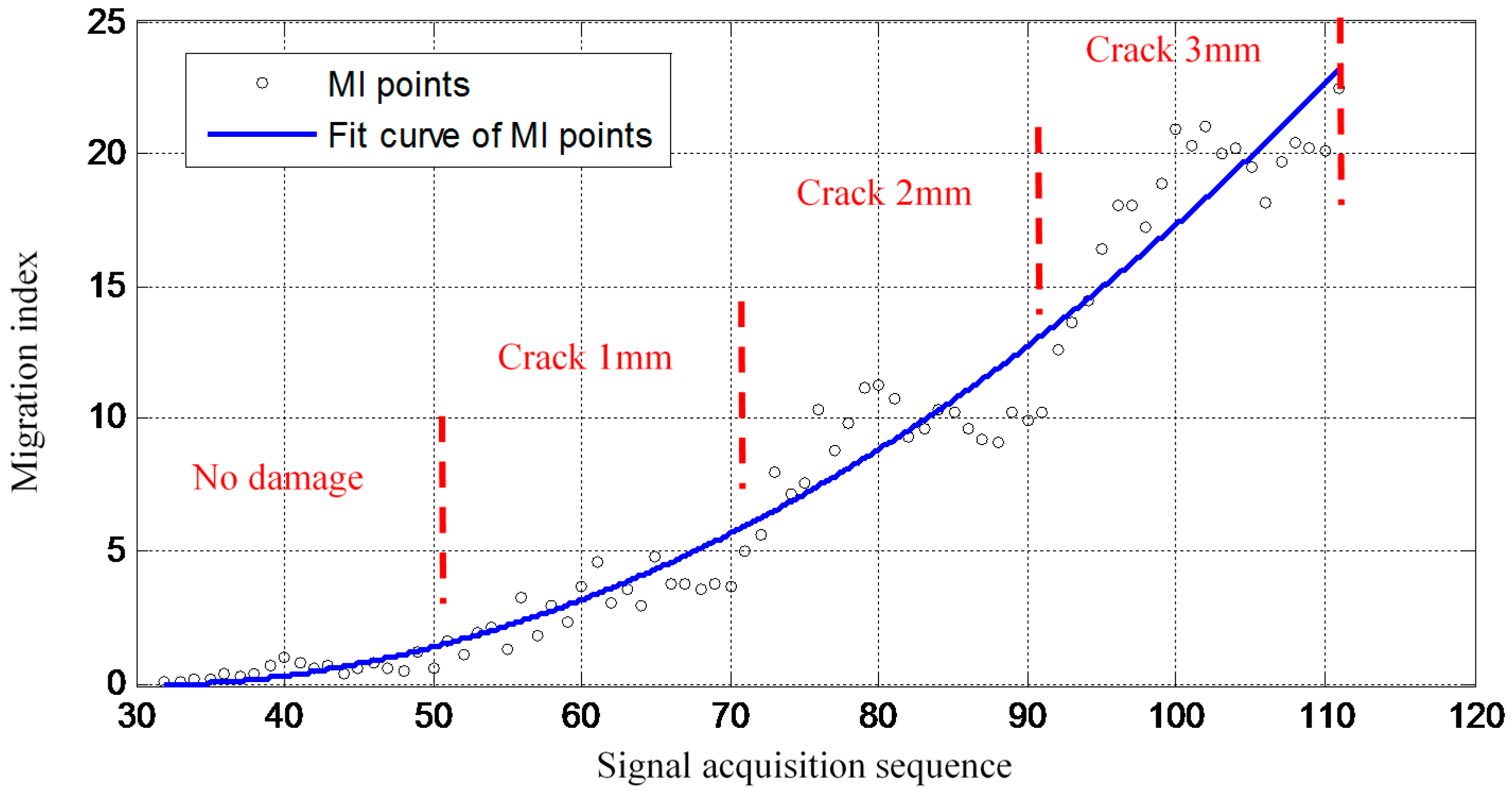
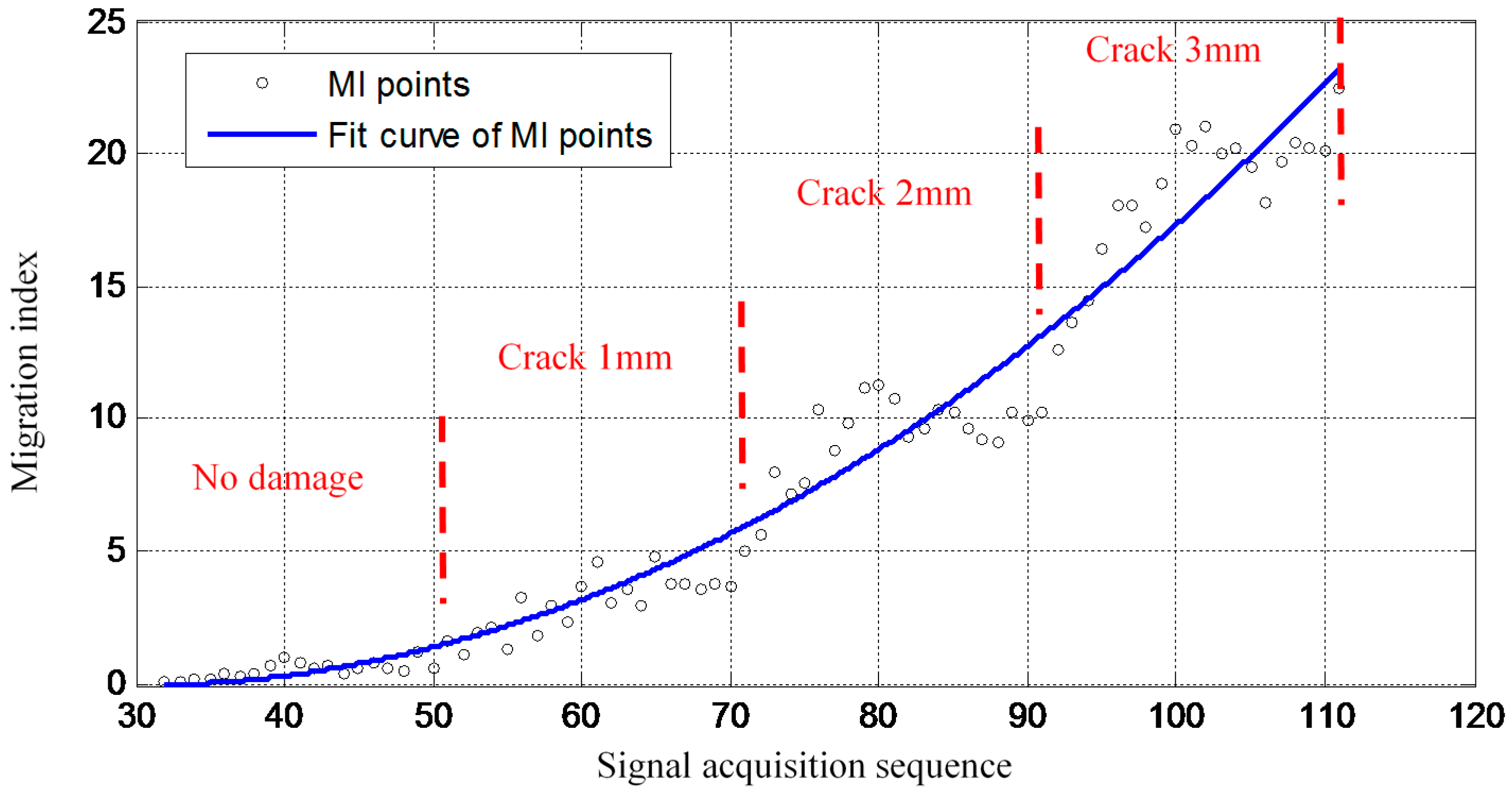
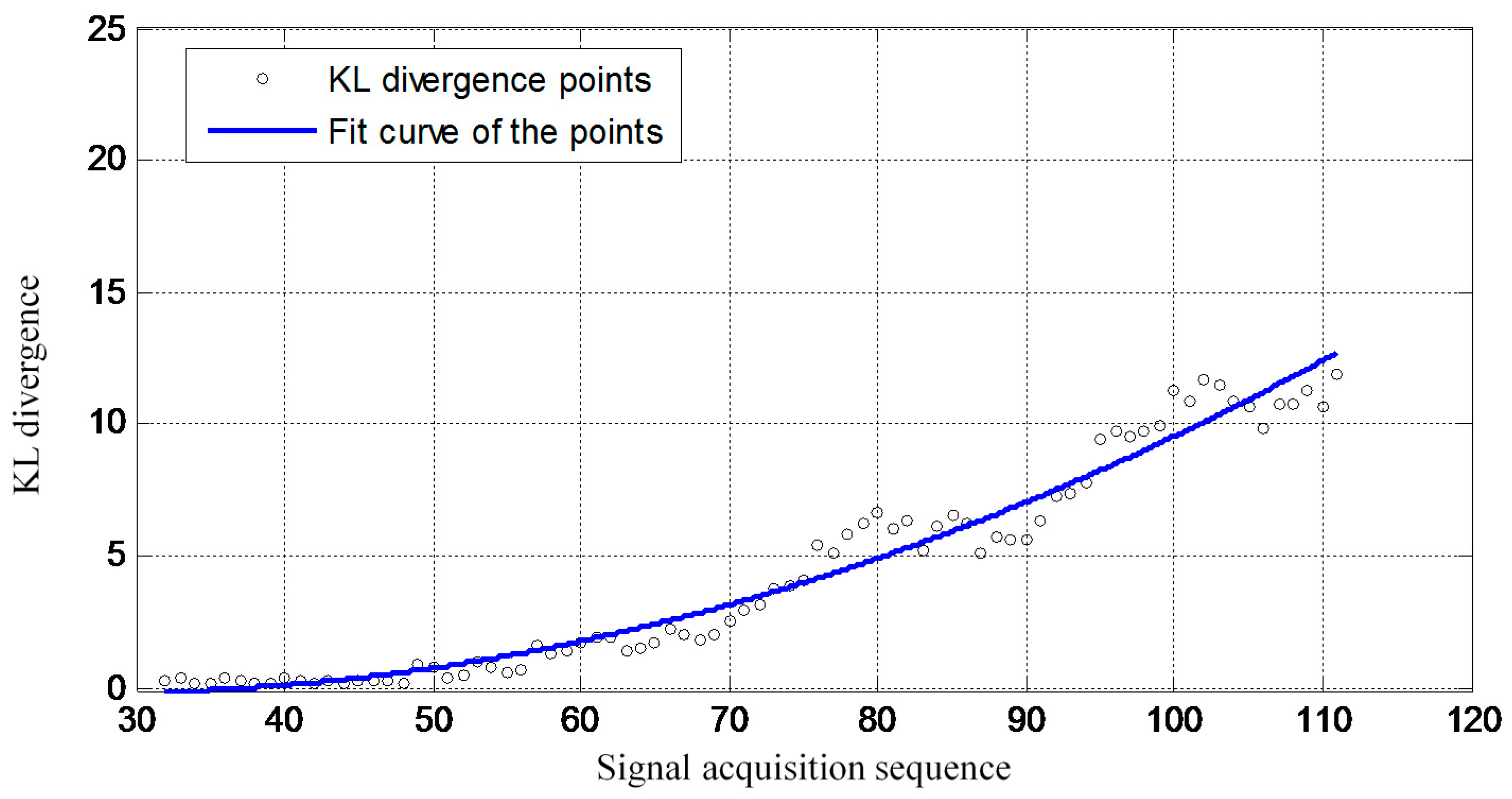
2.4. Migration Index
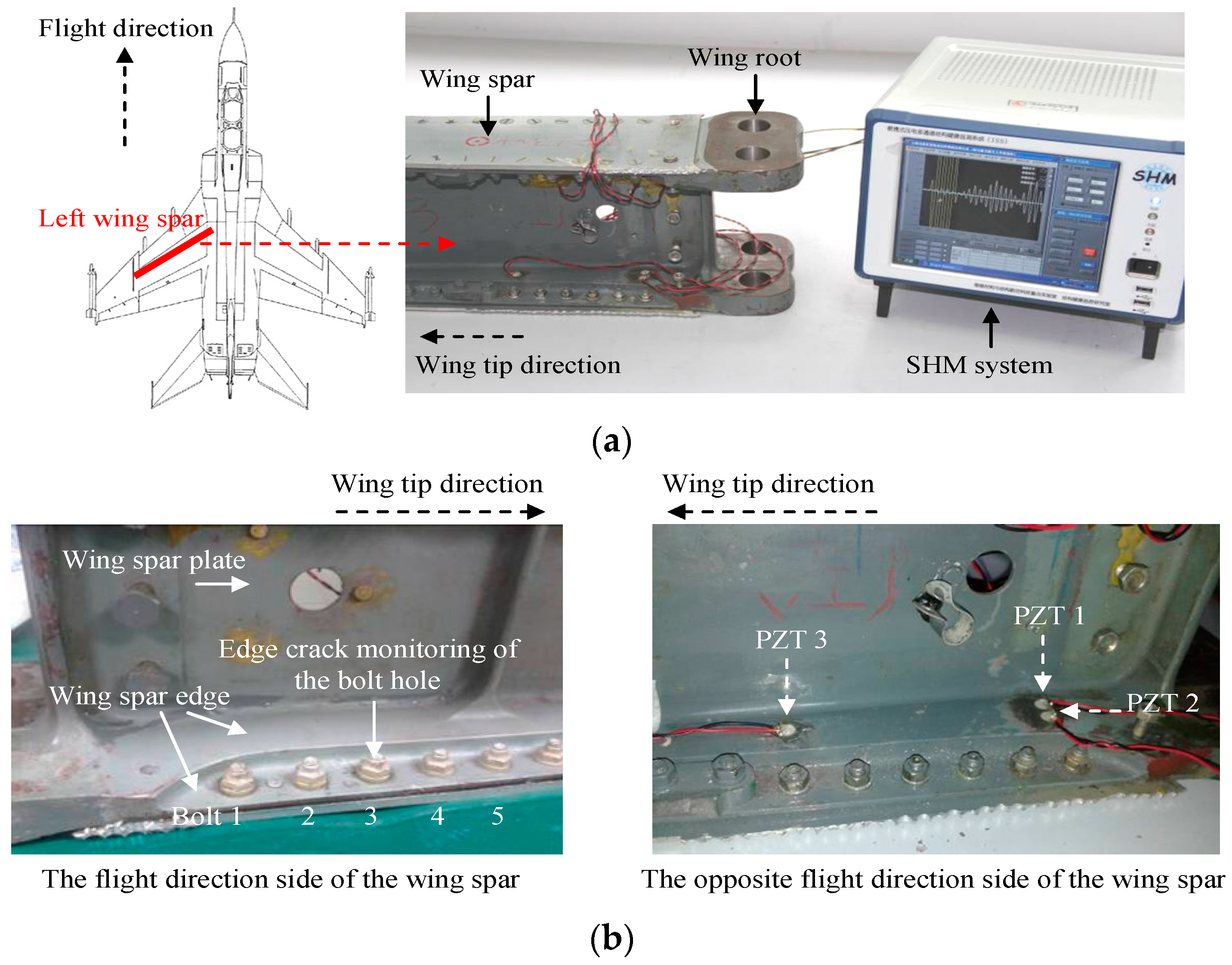
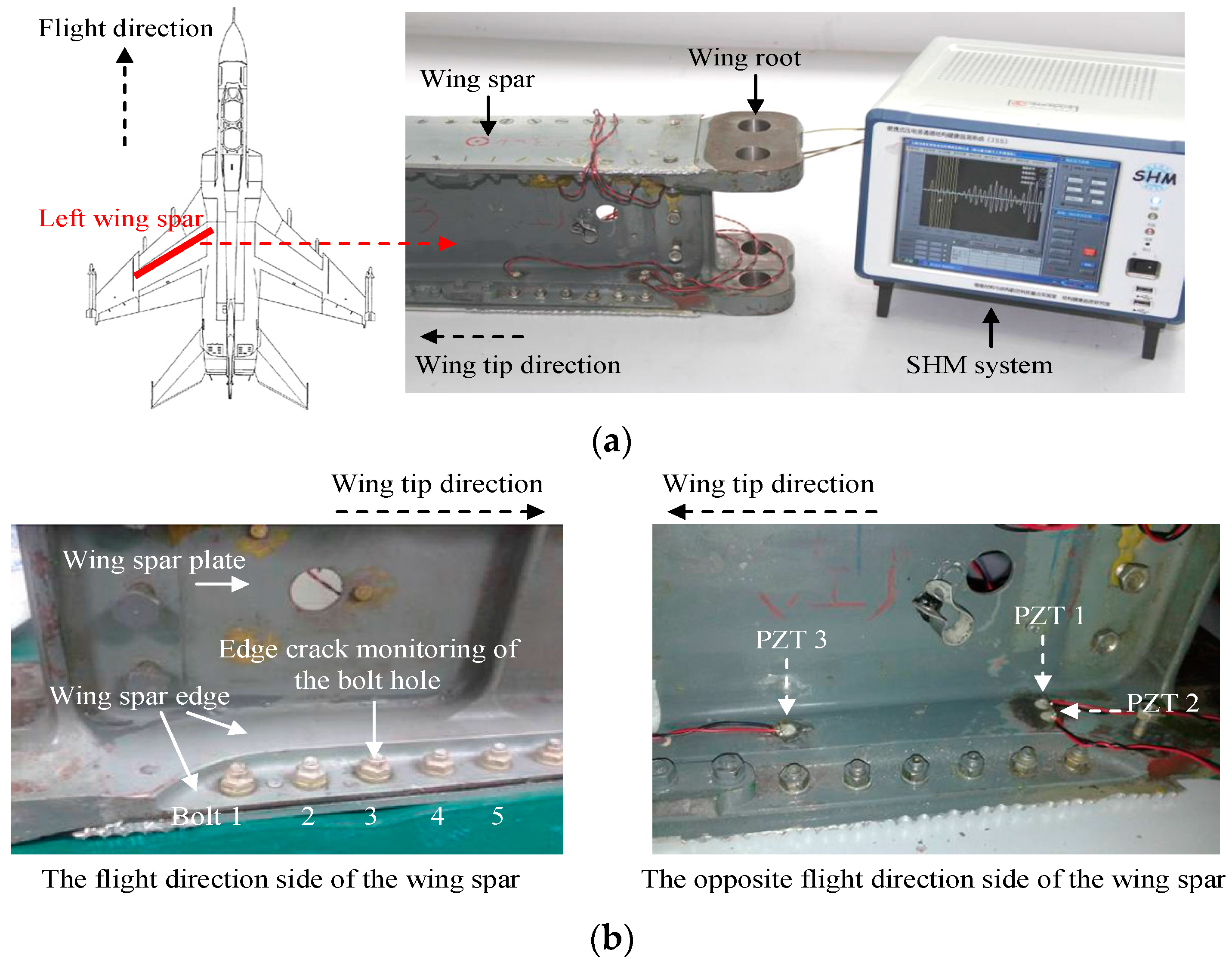
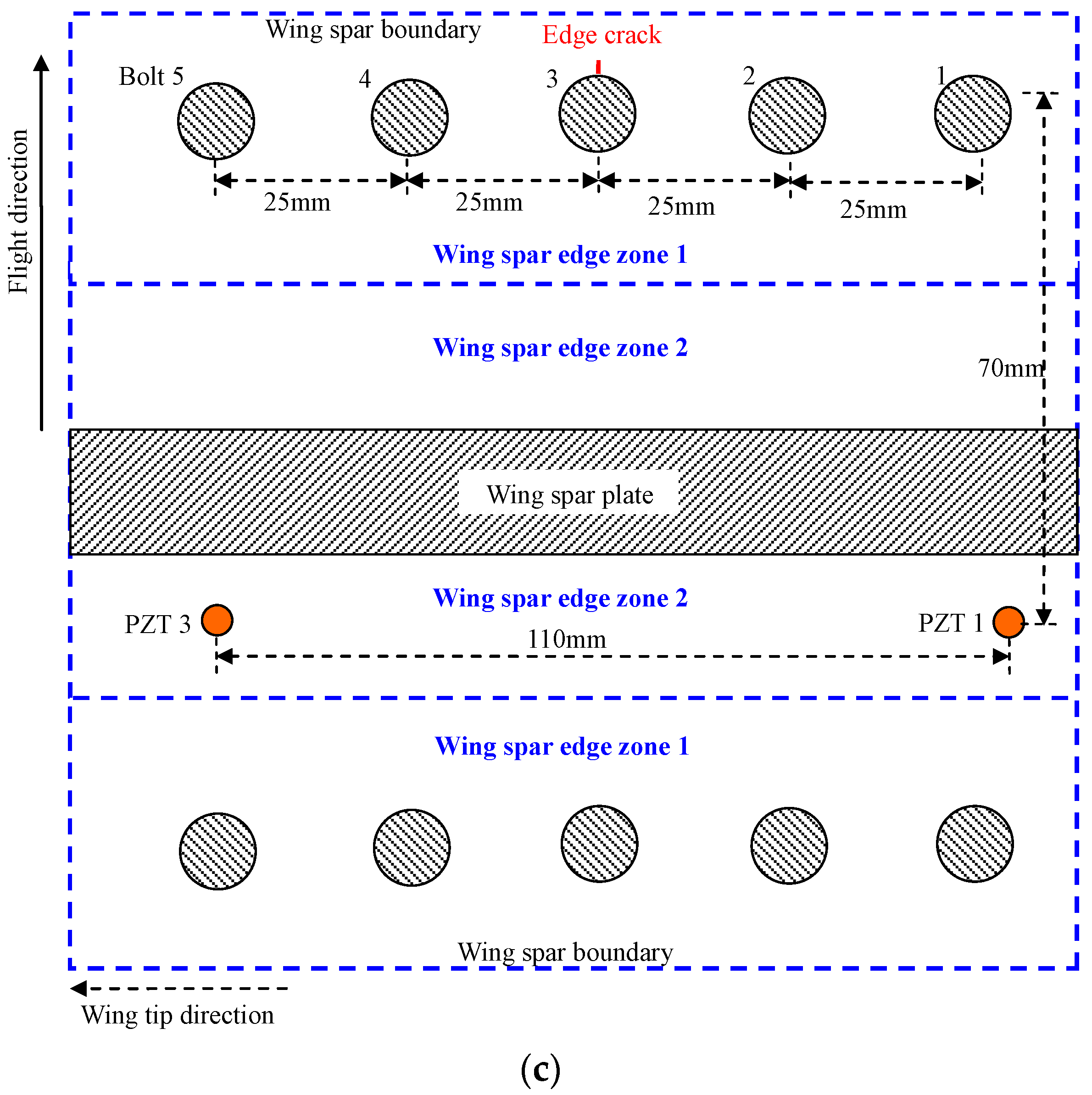
3. Method Validation on an Aircraft Wing Spar
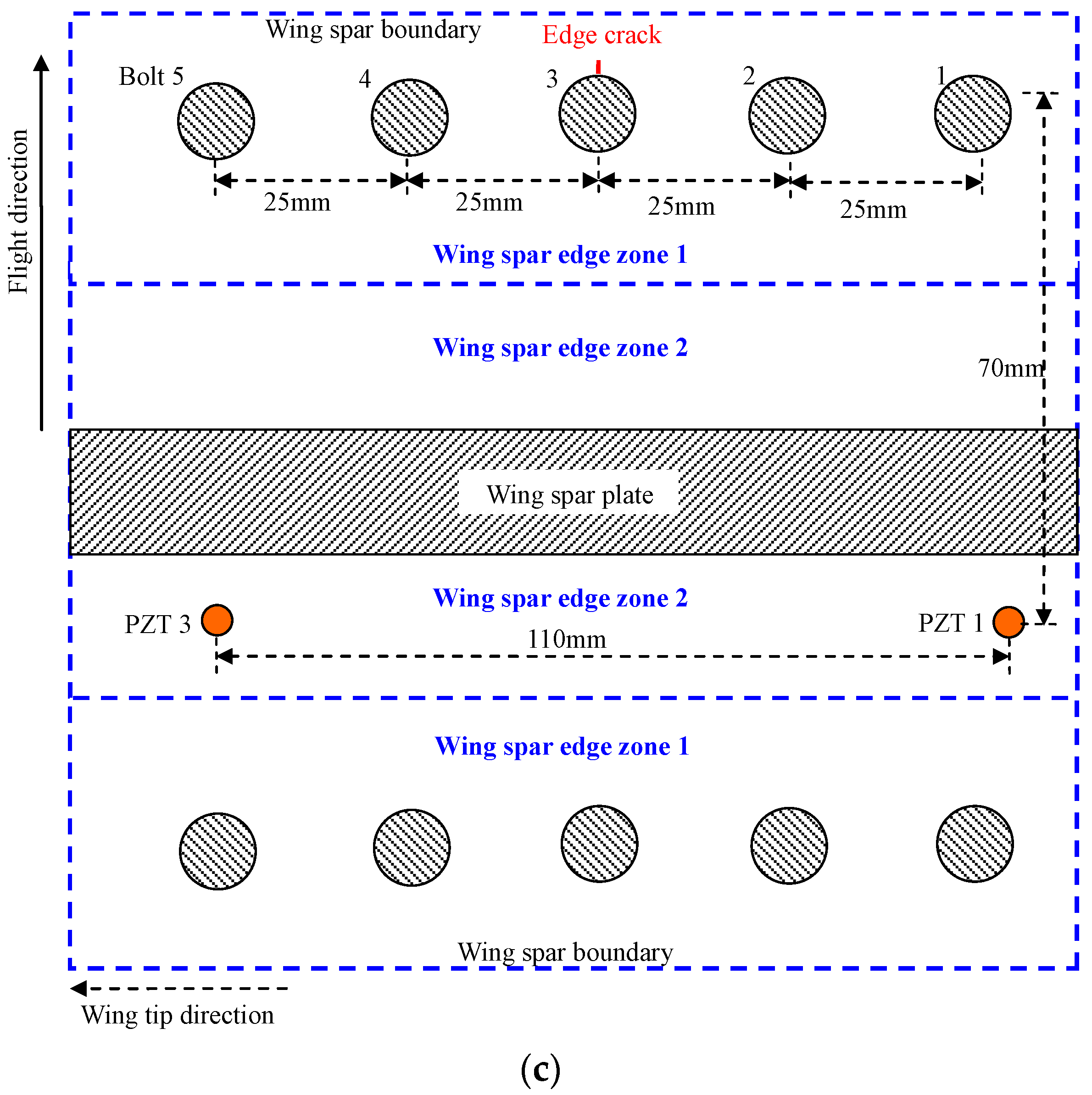
3.1. Validation Setup
- Step 1:
- Acquire a GW baseline signal when all the bolts are tight.
- Step 2:
- Loosen one bolt and acquire a GW signal, and then fasten the bolt and acquire a GW signal.
- Step 3:
- Repeat this process on each bolt respectively.
- Step 4:
- Repeat Steps 2 and 3 twice.
- Step 1:
- Repeat the Steps 2 and 3 in Part 1 twice.
- Step 2:
- Remove the bolt 3 and produce a crack of length 1 mm at the bolt hole. Then fasten the bolt 3 and repeat Step 1.
- Step 3:
- Remove the bolt 3 and extend the crack length to 2 mm. Then fasten the bolt 3 and repeat Step 1.
- Step 4:
- Remove the bolt 3 and extend the crack length to 3 mm. Then fasten the bolt 3 and repeat Step 1.
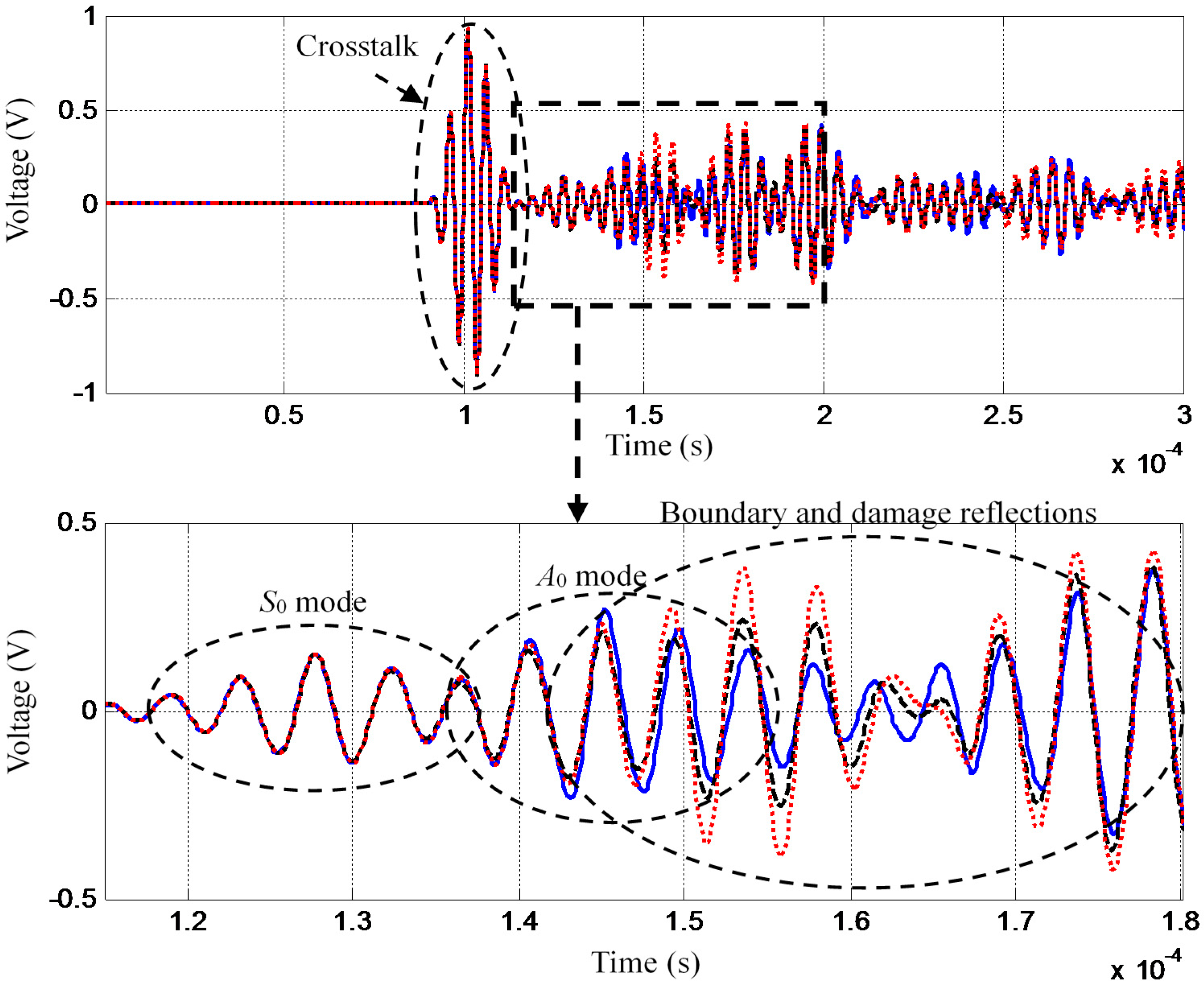
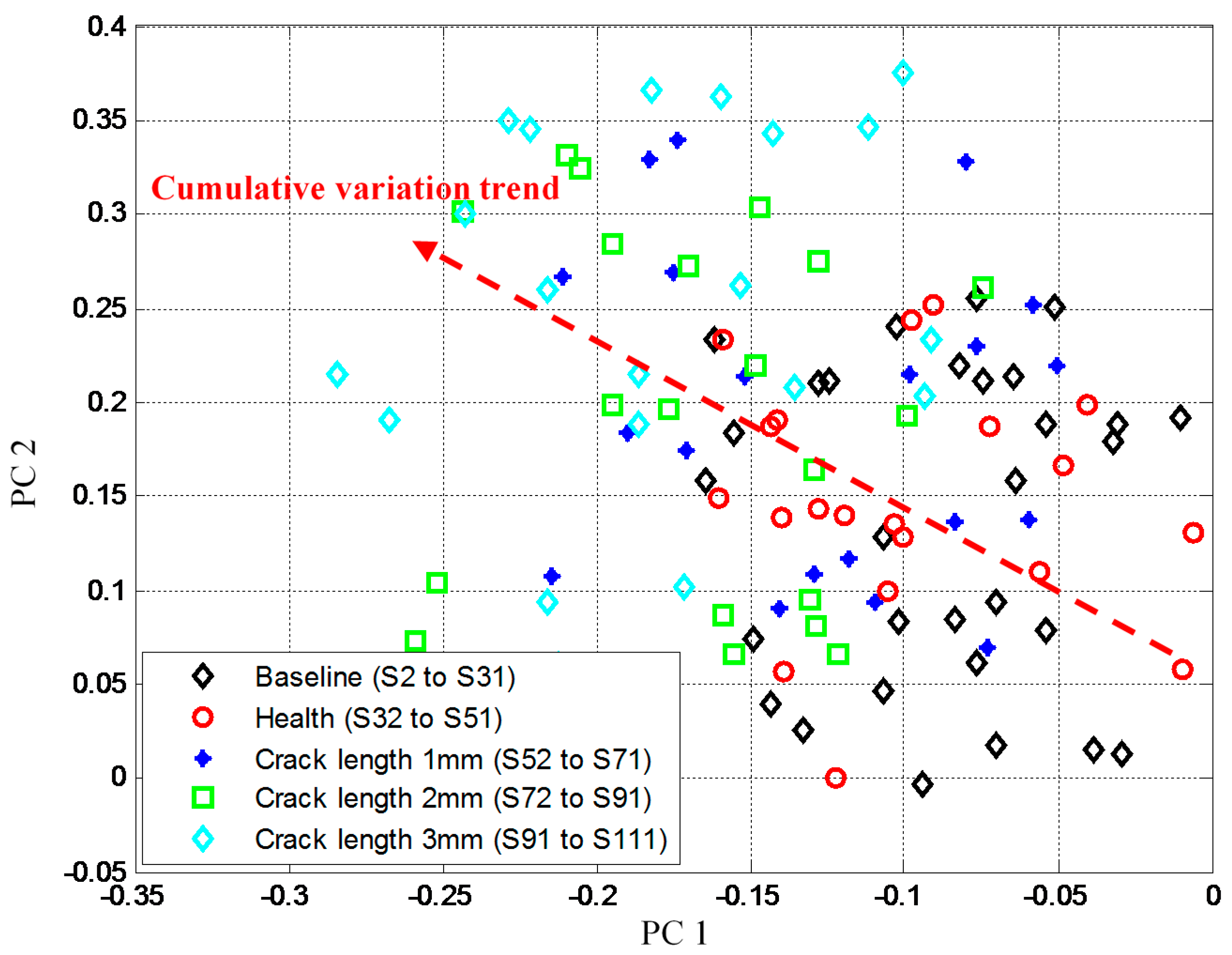
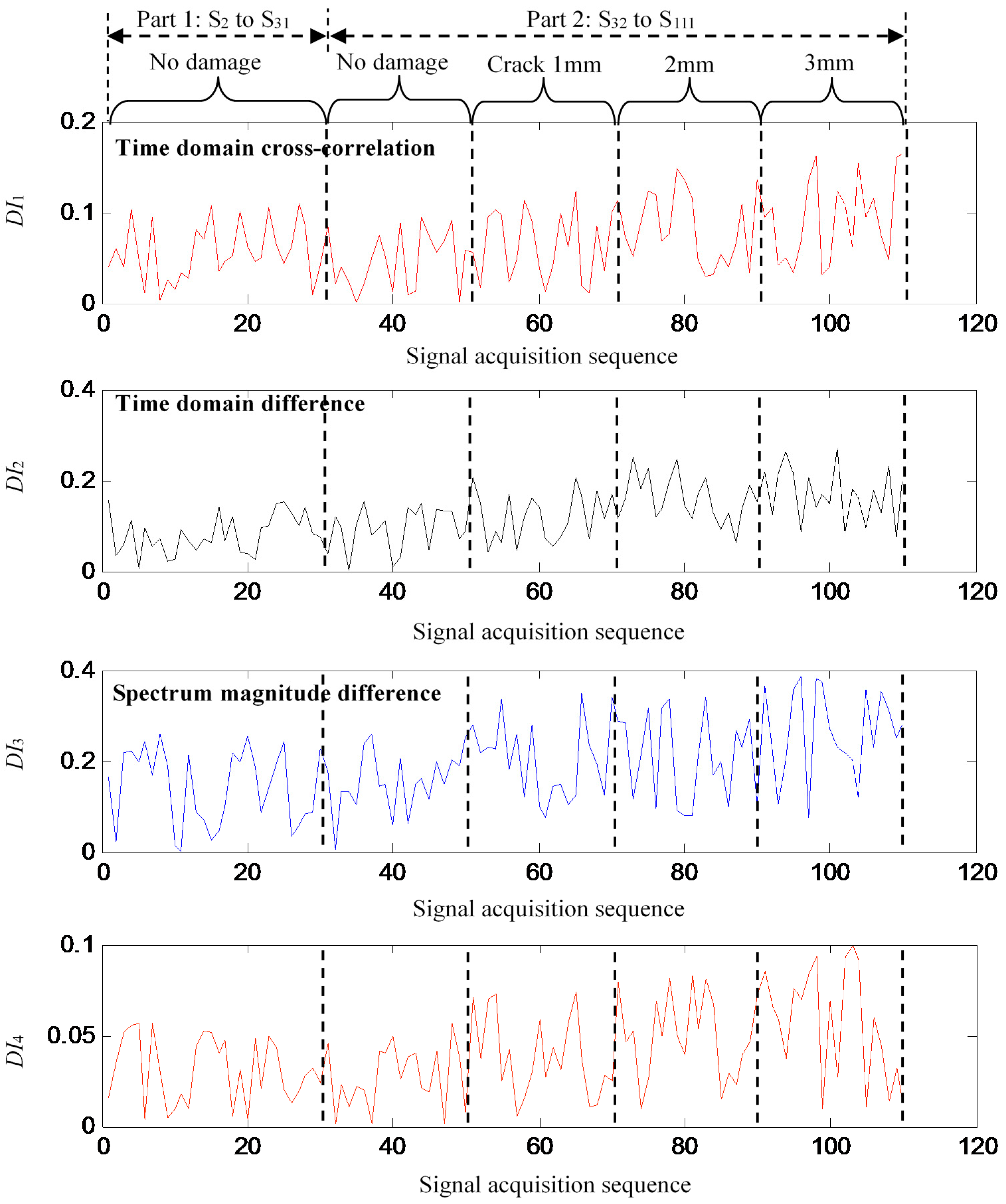
3.2. GW Signals and Damage Index
3.3. GMM On-Line Adaptive Migration
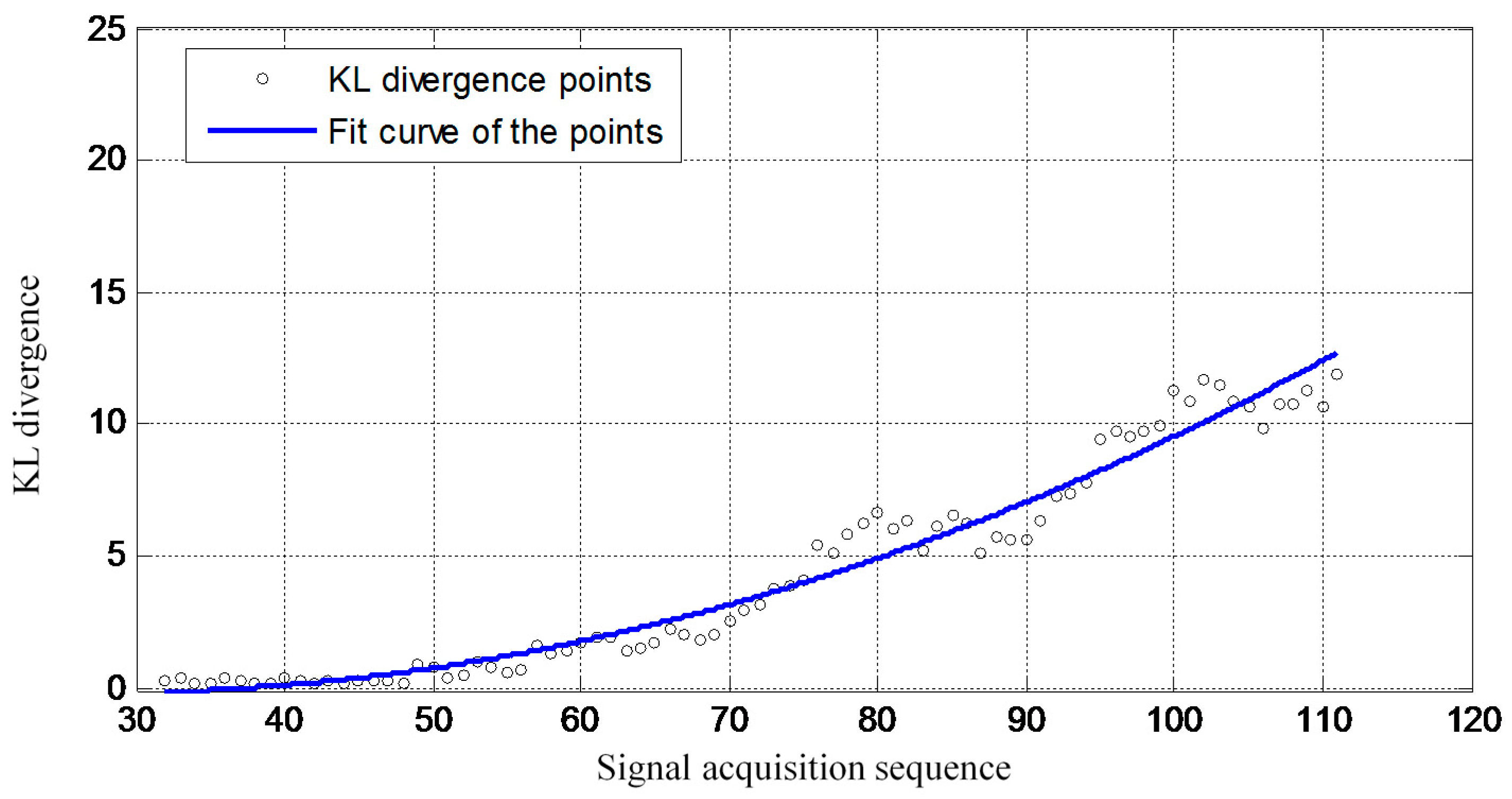
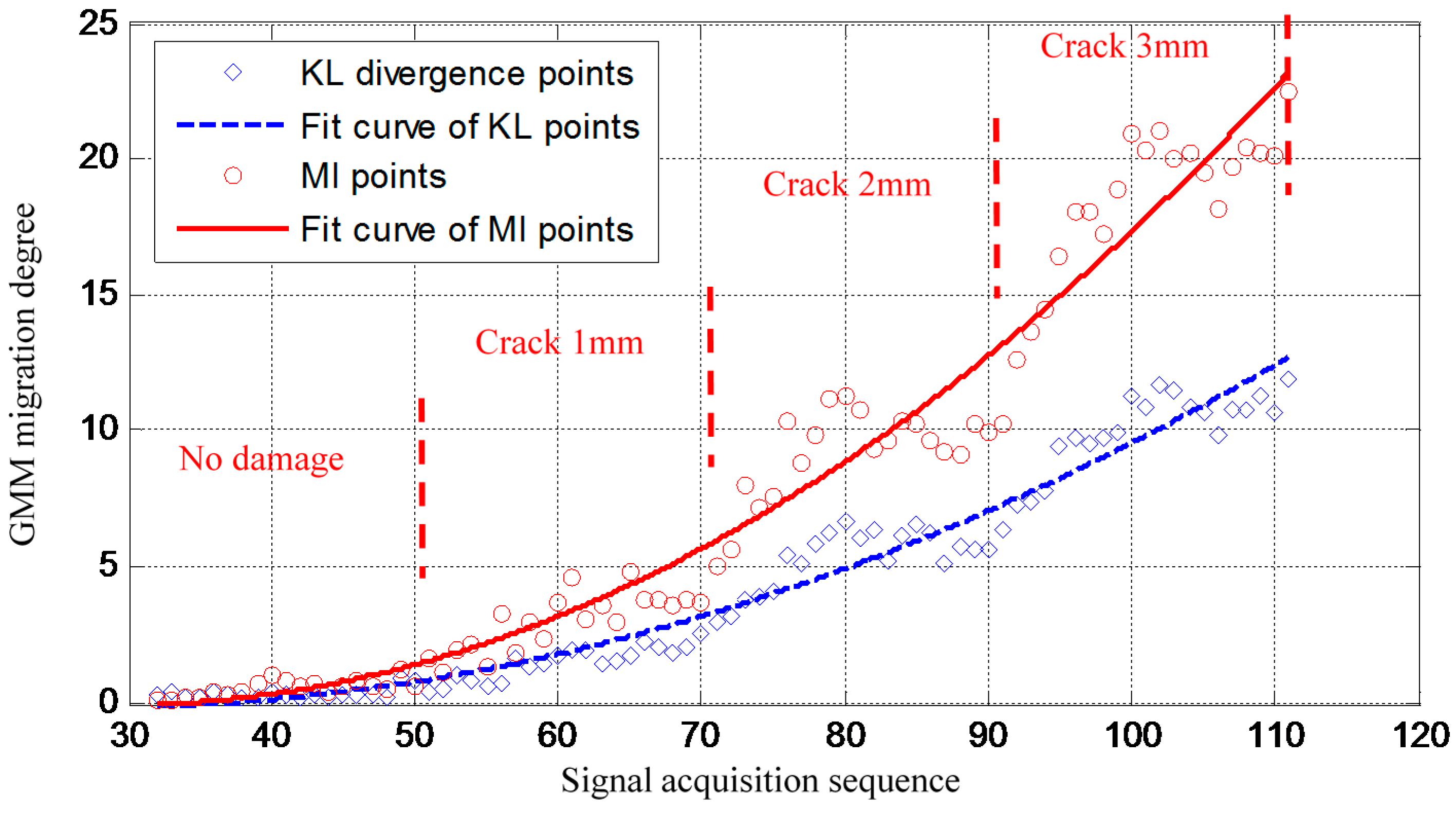
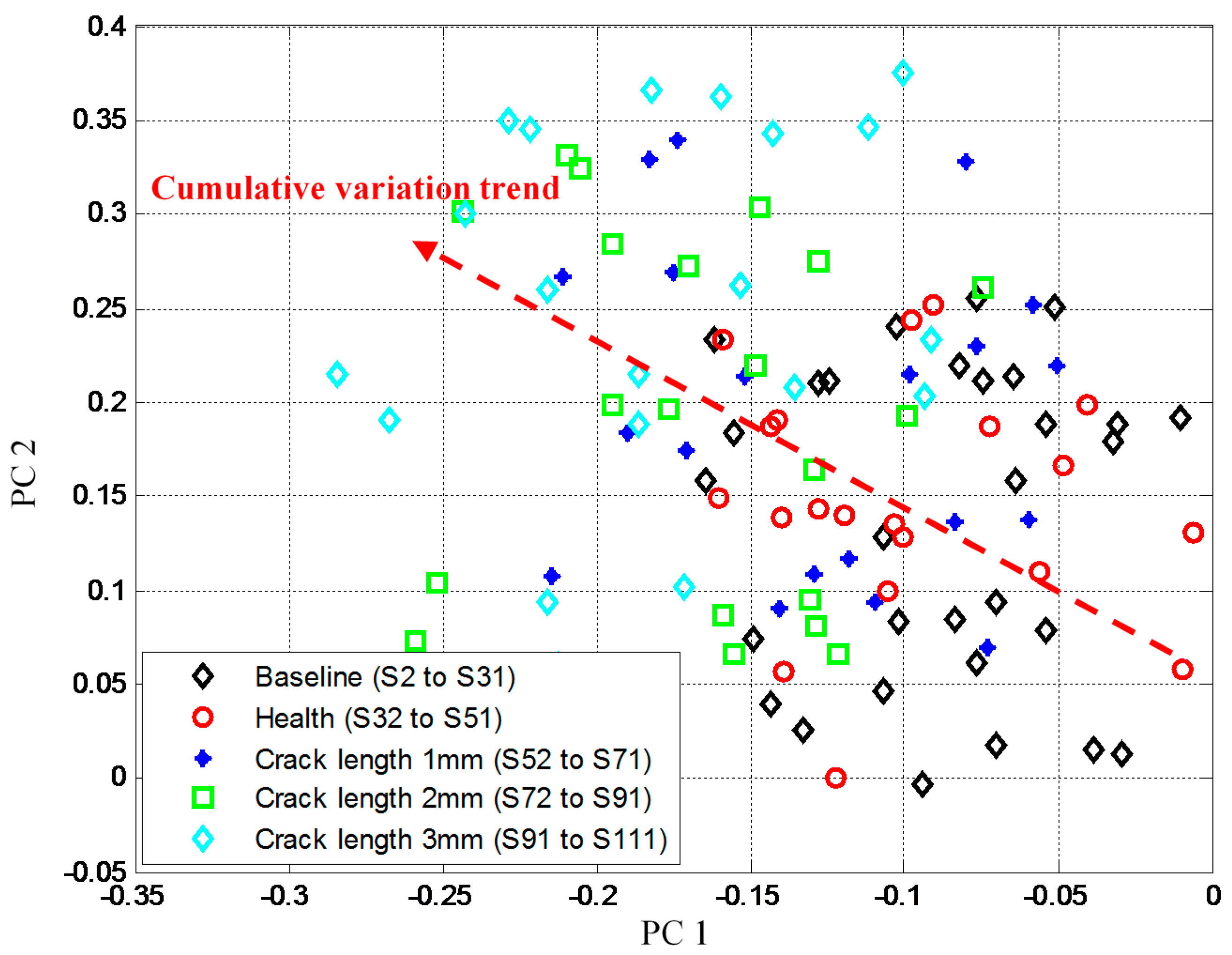
3.4. Crack Propagation Monitoring Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cheng, S.; Azarian, M.H.; Pecht, M.G. Sensor Systems for Prognostics and Health Management. Sensors 2010, 10, 5774–5797. [Google Scholar] [CrossRef] [PubMed]
- Esperon-Miguez, M.; John, P.; Jennions, I.K. A Review of Integrated Vehicle Health Management Tools for Legacy Platforms: Challenges and Opportunities. Prog. Aerosp. Sci. 2013, 56, 19–34. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An Introduction to Structural Health Monitoring. Proc. R. Soc. A Math. Phys. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Boller, C.; Chang, F.K.; Fujino, Y. Encyclopedia of Structural Health Monitoring; John Wiley and Sons: New York, NY, USA, 2009. [Google Scholar]
- ARP6461: Guidelines for Implementation of Structural Health Monitoring on Fixed Wing Aircraft; SAE International: London, UK, 2013.
- Buderath, M.; McFeat, J.; Azzam, H. The Need for Guidance on Integrating Structural Health Monitoring within Military Aircraft Systems. Struct. Health Monit. 2014, 13, 581–590. [Google Scholar] [CrossRef]
- Sohn, H. Effects of Environmental and Operational Variability on Structural Health Monitoring. Proc. R. Soc. A Math. Phys. 2007, 365, 539–560. [Google Scholar] [CrossRef] [PubMed]
- Chiu, W.K.; Tian, T.; Chang, F.K. The Effects of Structural Variations on the Health Monitoring of Composite Structures. Compos. Struct. 2009, 87, 121–140. [Google Scholar] [CrossRef]
- Lopez, I.; Sarigul-Klijn, N. A Review of Uncertainty in Flight Vehicle Structural Damage Monitoring, Diagnosis and Control: Challenges and Opportunities. Prog. Aerosp. Sci. 2010, 46, 247–273. [Google Scholar] [CrossRef]
- Li, F.; Su, Z.; Ye, L.; Meng, G. A Correlation Filtering-based Matching Pursuit (CF-MP) for Damage Identification Using Lamb Waves. Smart Mater. Struct. 2006, 15, 1585–1594. [Google Scholar] [CrossRef]
- Qing, X.; Beard, S.J.; Kumar, A.; Ooi, T.K.; Chang, F.K. Built-in Sensor Network for Structural Health Monitoring of Composite Structure. J. Intell. Mater. Syst. Struct. 2007, 18, 39–49. [Google Scholar] [CrossRef]
- Lu, Y.; Ye, L.; Su, Z.; Zhang, L.; Cheng, L. Artificial Neural Network (ANN)-based Crack Identification in Aluminum Plates with Lamb Wave Signals. J. Intell. Mater. Syst. Struct. 2008. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Mei, H.; Qian, W. Digital Sequences and a Time Reversal-based Impact Region Imaging and Localization Method. Sensors 2013, 13, 13356–13381. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Yang, Z.; Chen, X. Quantitative Damage Detection and Sparse Sensor Array Optimization of Carbon Fiber Reinforced Resin Composite Laminates for Wind Turbine Blade Structural Health Monitoring. Sensors 2014, 14, 7312–7331. [Google Scholar] [CrossRef] [PubMed]
- An, Y.K.; Kim, J.H.; Yim, H.J. Lamb Wave Line Sensing for Crack Detection in a Welded Stiffener. Sensors 2014, 14, 12871–12884. [Google Scholar] [CrossRef] [PubMed]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Academic Press: San Diego, CA, USA, 2014. [Google Scholar]
- Staszewski, W.J.; Mahzan, S.; Traynor, R. Health Monitoring of Aerospace Composite Structures-Active and Passive Approach. Compos. Sci. Technol. 2009, 69, 1678–1685. [Google Scholar] [CrossRef]
- Qing, X.; Beard, S.; Shen, S.B.; Banerjee, S.; Bradley, I.; Salama, M.M.; Chang, F.K. Development of a Real-Time Active Pipeline Integrity Detection System. Smart Mater. Struct. 2009, 18. [Google Scholar] [CrossRef]
- Liu, L.; Yuan, F.G. A linear Mapping Technique for Dispersion Removal of Lamb Waves. Struct. Health Monit. 2010, 9, 75–86. [Google Scholar] [CrossRef]
- Zhou, C.; Su, Z.; Cheng, L. Probability-based diagnostic imaging using hybrid features extracted from ultrasonic Lamb wave signals. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.F.; Zhang, X.; Wang, Y. A time Reversal Focusing based Impact Imaging Method and Its Application on an Aircraft Wing Box. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Willberg, C.; Koch, S.; Mook, G.; Pohl, J.; Gabbert, U. Continuous Mode Conversion of Lamb Waves in CFRP Plates. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Qiu, L.; Liu, M.; Qing, X.; Yuan, S. A Quantitative Multidamage Monitoring Method for Large-Scale Complex Composite. Struct. Health Monit. 2013, 12, 183–196. [Google Scholar] [CrossRef]
- Su, Z.; Zhou, C.; Hong, M.; Cheng, L.; Wang, Q.; Qing, X. Acousto-Ultrasonics-based Fatigue Damage Characterization: Linear versus Nonlinear Signal Features. Mech. Syst. Signal Process. 2014, 45, 225–239. [Google Scholar] [CrossRef]
- Cai, J.; Yuan, S.; Qing, X.; Chang, F.K.; Shi, L.; Qiu, L. The Linearly Dispersive Signal Construction of Lamb Waves with Measured Relative Wavenumber Curves. Sens. Actuators A Phys. 2015, 221, 41–52. [Google Scholar] [CrossRef]
- Hong, M.; Su, Z.; Lu, Y.; Sohn, H.; Qing, X. Locating Fatigue Damage Using Temporal Signal Features of Nonlinear Lamb Waves. Mech. Syst. Signal Process. 2015, 60, 182–197. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z.; Leckey, C. Crack Imaging and Quantification in Aluminum Plates with Guided Wave Wavenumber Analysis Methods. Ultrasonics 2015, 62, 203–212. [Google Scholar] [CrossRef] [PubMed]
- Clarke, T.; Simonetti, F.; Cawley, P. Guided Wave Health Monitoring of Complex Structures by Sparse Array Systems: Influence of Temperature Changes on Performance. J. Sound Vib. 2010, 329, 2306–2322. [Google Scholar] [CrossRef]
- Croxford, A.J.; Moll, J.; Wilcox, P.D.; Michaels, J.E. Efficient Temperature Compensation Strategies for Guided Wave Structural Health Monitoring. Ultrasonics 2010, 50, 517–528. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Gao, L.; Yuan, S.; Qiu, L.; Qing, X. An Adaptive Filter-based Temperature Compensation Technique for Structural Health Monitoring. J. Intell. Mater. Syst. Struct. 2014, 25, 2187–2198. [Google Scholar] [CrossRef]
- Roy, S.; Lonkar, K.; Janapati, V.; Chang, F.K. A Novel Physics-based Temperature Compensation Model for Structural Health Monitoring Using Ultrasonic Guided Waves. Struct. Health Monit. 2014, 3, 321–342. [Google Scholar] [CrossRef]
- Wang, Q.; Yuan, S.F. Baseline-free Imaging Method based on New PZT Sensor Arrangements. J. Intell. Mater. Syst. Struct. 2009, 20, 1663–1673. [Google Scholar]
- Lim, H.J.; Sohn, H.; Yeum, C.M.; Kim, J.M. Reference-Free Damage Detection, Localization, and Quantification in Composites. J. Acoust. Soc. Am. 2013, 133, 3838–3845. [Google Scholar] [PubMed]
- Pavlopoulou, S.; Staszewski, W.J.; Soutis, C. Evaluation of Instantaneous Characteristics of Guided Ultrasonic Waves for Structural Quality and Health Monitoring. Struct. Control Health Monit. 2013, 20, 937–955. [Google Scholar] [CrossRef]
- Zhou, C.; Hong, M.; Su, Z.; Wang, Q.; Cheng, L. Evaluation of Fatigue Cracks Using Nonlinearities of Acousto-Ultrasonic Waves Acquired by an Active Sensor Network. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Cross, E.J.; Manson, G.; Worden, K.; Pierc, S.G. Features for Damage Detection with Insensitivity to Environmental and Operational Variations. Prog. Aerosp. Sci. 2012, 468, 4098–4122. [Google Scholar] [CrossRef]
- Dao, B.P.; Staszewski, W.J. Cointegration Approach for Temperature Effect Compensation in Lamb-Wave-based Damage Detection. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Liu, C.; Harley, J.B.; Bergés, M.; Greve, D.W.; Oppenheim, I.J. Robust Ultrasonic Damage Detection under Complex Environmental Conditions Using Singular Value Decomposition. Ultrasonics 2015, 58, 75–86. [Google Scholar] [CrossRef] [PubMed]
- Banfield, J.; Raftery, A. Model-based Gaussian and Non Gaussian Clustering. Biometrics 1993, 49, 803–821. [Google Scholar] [CrossRef]
- Figueiredo, M.A.T.; Jain, A.K. Unsupervised Learning of Finite Mixture Models. IEEE Trans. Pattern Anal. 2002, 24, 381–396. [Google Scholar] [CrossRef]
- Chen, J.; Salim, M.B.; Matsumoto, M. A Gaussian Mixture Model-based Continuous Boundary Detection for 3D Sensor Networks. Sensors 2010, 10, 7632–7650. [Google Scholar] [CrossRef] [PubMed]
- Si, X.; Wang, W.; Hu, C.; Zhou, D. Remaining Ueful Life Estimation—A Review on the Statistical Data Driven Approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Tschope, C.; Wolff, M. Statistical Classifiers for Structural Health Monitoring. IEEE Sens. J. 2009, 9, 1567–1576. [Google Scholar] [CrossRef]
- Banerjee, S.; Qing, X.; Beard, S.; Chang, F.K. Prediction of Progressive Damage State at the Hot Spots Using Statistical Estimation. J. Intell. Mater. Syst. Struct. 2010, 21, 595–605. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Chang, F.K.; Bao, Q.; Mei, H.F. On-line Updating Gaussian Mixture Model for Aircraft Wing Spar Damage Evaluation under Time-Varying Boundary Condition. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- McLachlan, G.; Krishnan, T. The EM Algorithm and Extensions; John Wiley and Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Chakraborty, D.; Kovvali, N.; Papandreou-Suppappola, A.; Chattopadhyay, A. An Adaptive Learning Damage Estimation Method for Structural Health Monitoring. J. Intell. Mater. Syst. Struct. 2015, 26, 125–143. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal Component Analysis; Springer Verlag: Berlin, Germany, 2002. [Google Scholar]
- Lee, D.S. Effective Gaussian Mixture Learning for Video Background Subtraction. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 827–832. [Google Scholar] [PubMed]
- Ueda, N.; Nakano, R.; Ghahramani, Z.; Hinton, G.E. SMEM Algorithm for Mixture Models. Neural Comput. 2000, 12, 2109–2128. [Google Scholar] [CrossRef] [PubMed]
- Goldberger, J.; Gordon, S.; Greenspan, H. An Efficient Image Similarity Measure based on Approximations of KL-Divergence between Two Gaussian Mixtures. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 1–8 December 2013.
- Kullback, S. Information Theory and Statistics; Dover Publications: New York, NY, USA, 1968. [Google Scholar]
- Qiu, L.; Yuan, S. On Development of a Multi-channel PZT Array Scanning System and Its Evaluating Application on UAV Wing Box. Sens. Actuators A Phys. 2009, 151, 220–230. [Google Scholar] [CrossRef]


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, L.; Yuan, S.; Mei, H.; Fang, F. An Improved Gaussian Mixture Model for Damage Propagation Monitoring of an Aircraft Wing Spar under Changing Structural Boundary Conditions. Sensors 2016, 16, 291. https://doi.org/10.3390/s16030291
Qiu L, Yuan S, Mei H, Fang F. An Improved Gaussian Mixture Model for Damage Propagation Monitoring of an Aircraft Wing Spar under Changing Structural Boundary Conditions. Sensors. 2016; 16(3):291. https://doi.org/10.3390/s16030291
Chicago/Turabian StyleQiu, Lei, Shenfang Yuan, Hanfei Mei, and Fang Fang. 2016. "An Improved Gaussian Mixture Model for Damage Propagation Monitoring of an Aircraft Wing Spar under Changing Structural Boundary Conditions" Sensors 16, no. 3: 291. https://doi.org/10.3390/s16030291
APA StyleQiu, L., Yuan, S., Mei, H., & Fang, F. (2016). An Improved Gaussian Mixture Model for Damage Propagation Monitoring of an Aircraft Wing Spar under Changing Structural Boundary Conditions. Sensors, 16(3), 291. https://doi.org/10.3390/s16030291