
BlueDetect: An iBeacon-Enabled Scheme for Accurate and Energy-Efficient Indoor-Outdoor Detection and Seamless Location-Based Service


Abstract
:1. Introduction
2. Related Work
2.1. GPS-Based IO Detection
2.2. Lightweight On-Board Sensor-Based IO Detection
2.3. Technologies for Location-Based Services
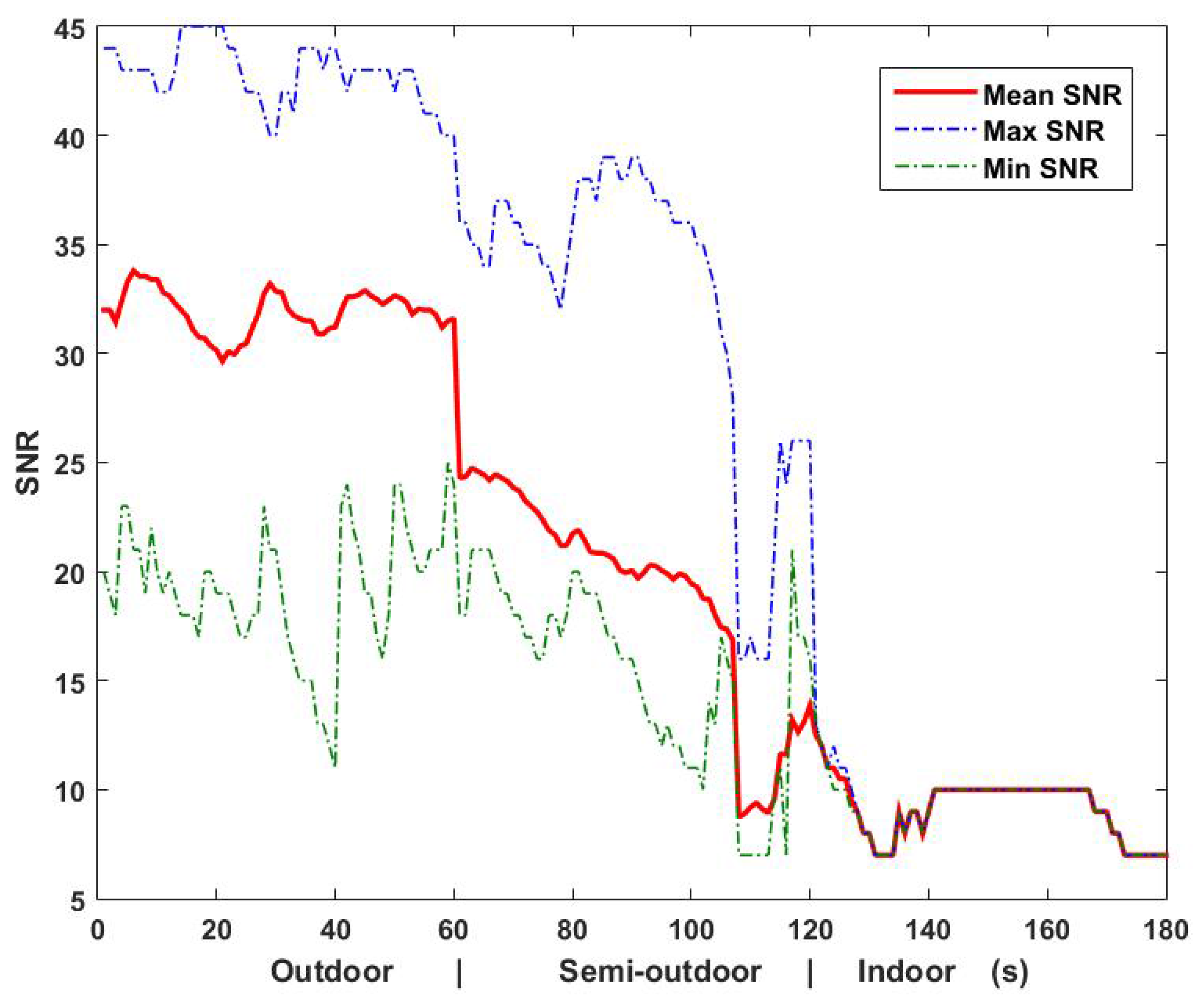
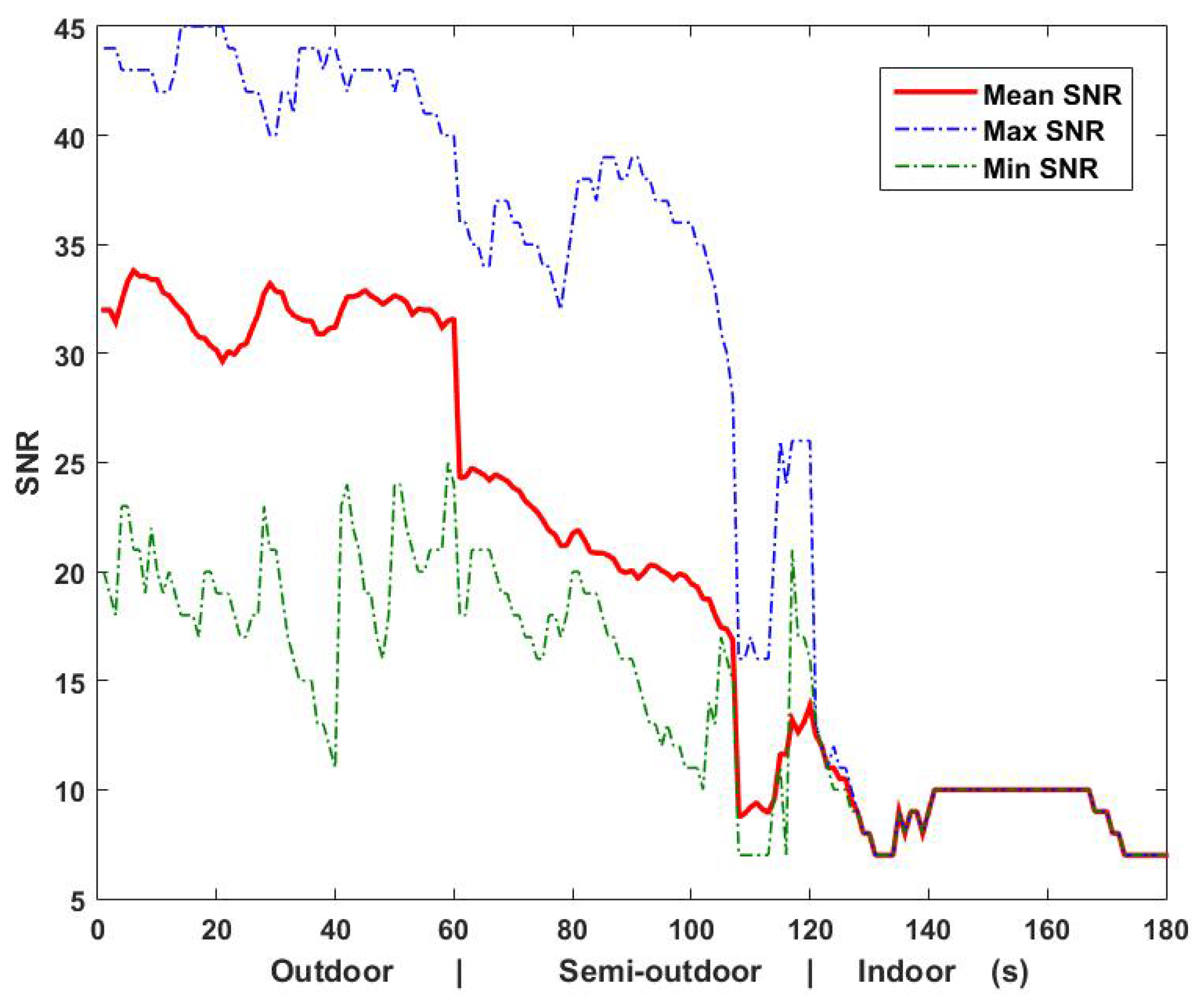
3. Motivation and Preliminary
4. System Design
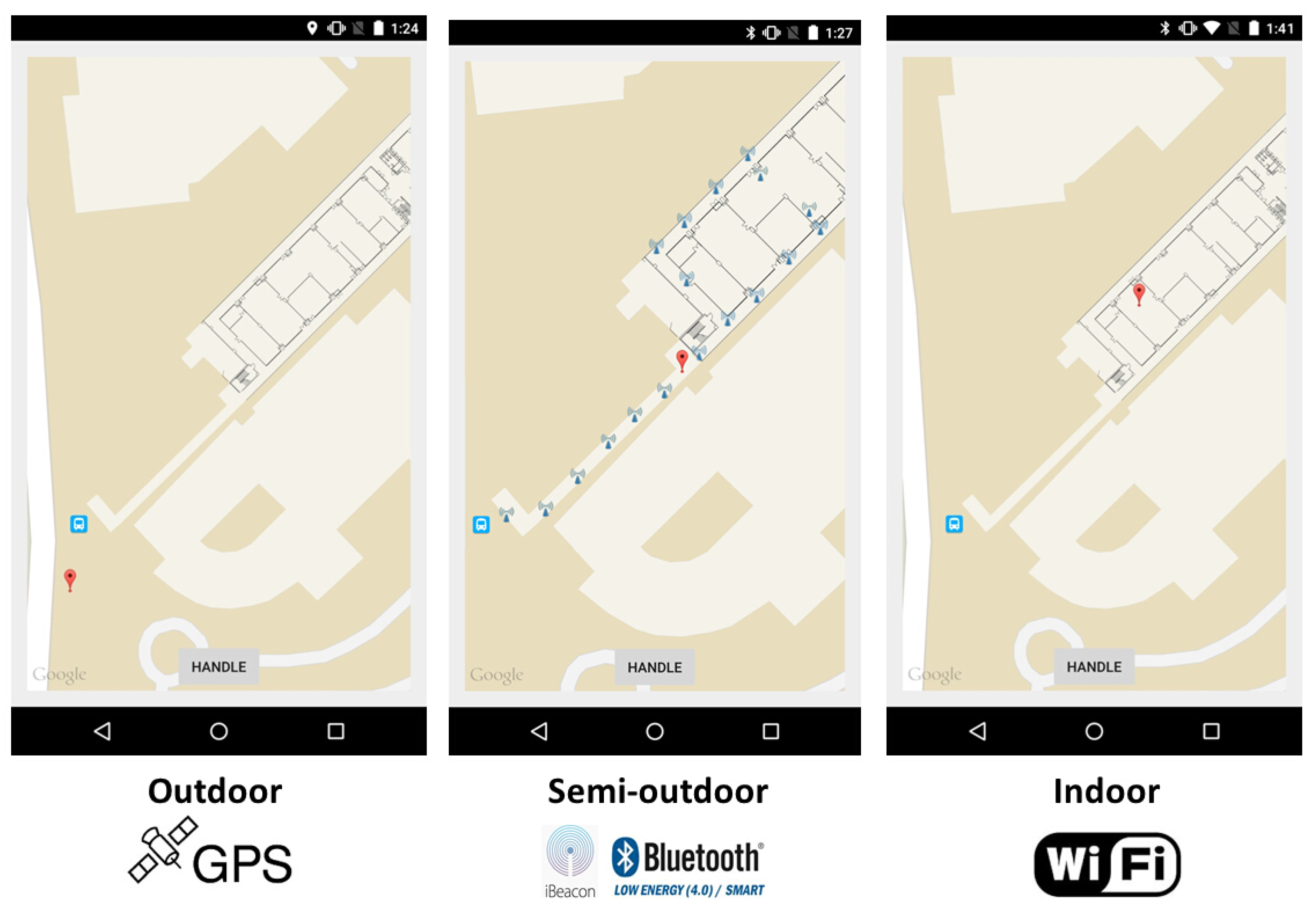
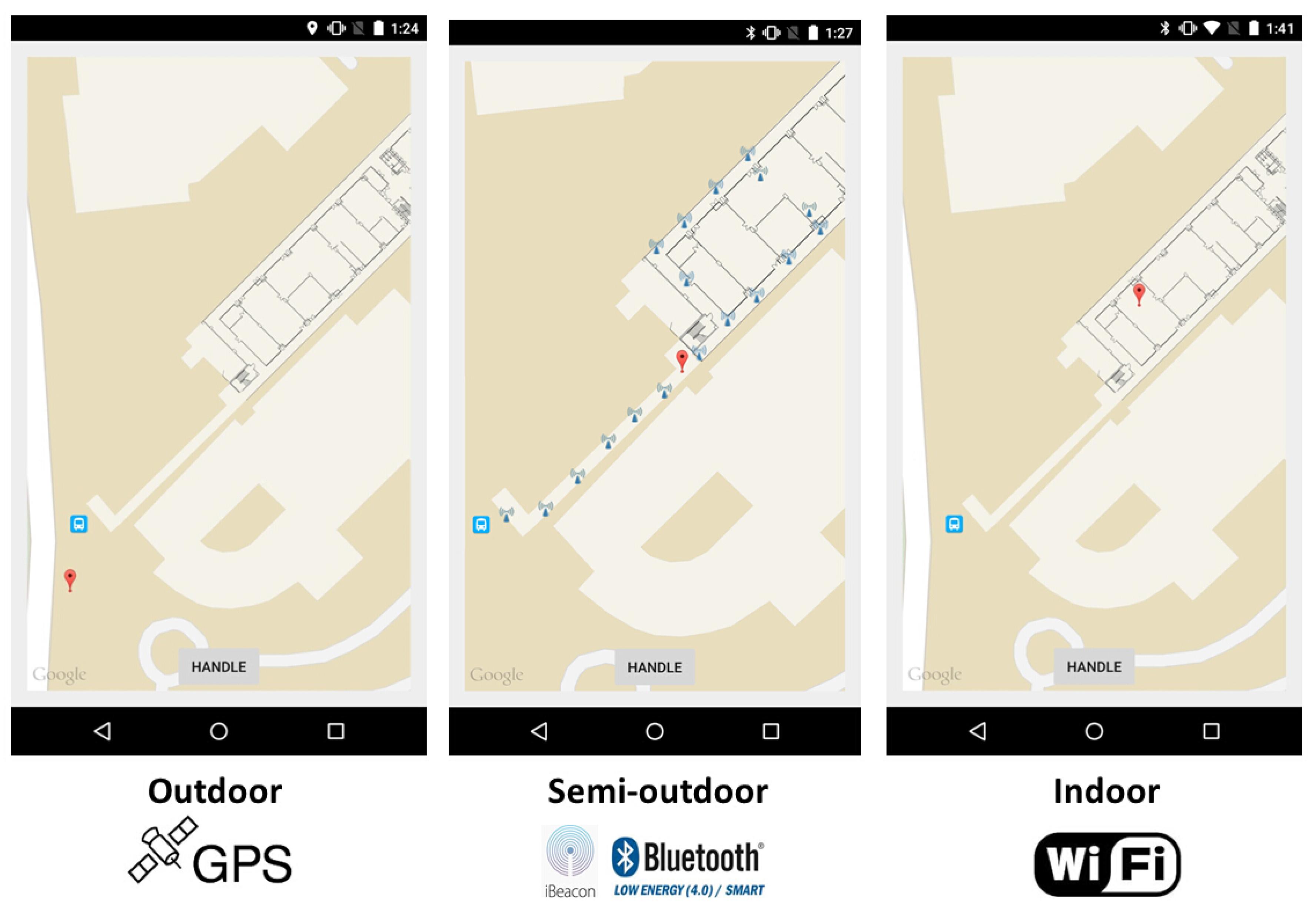
4.1. System Overview
4.2. Seamless Transition between Outdoors and Semi-Outdoors
| Algorithm 1 BlueDetect IO detection and localization algorithm (outdoors ⇌ semi-outdoors). |
|
4.3. Seamless Transition between Semi-Outdoors and Indoors
| Algorithm 2 BlueDetect IO detection and localization algorithm (Semi-outdoors ⇌ indoors). |
|
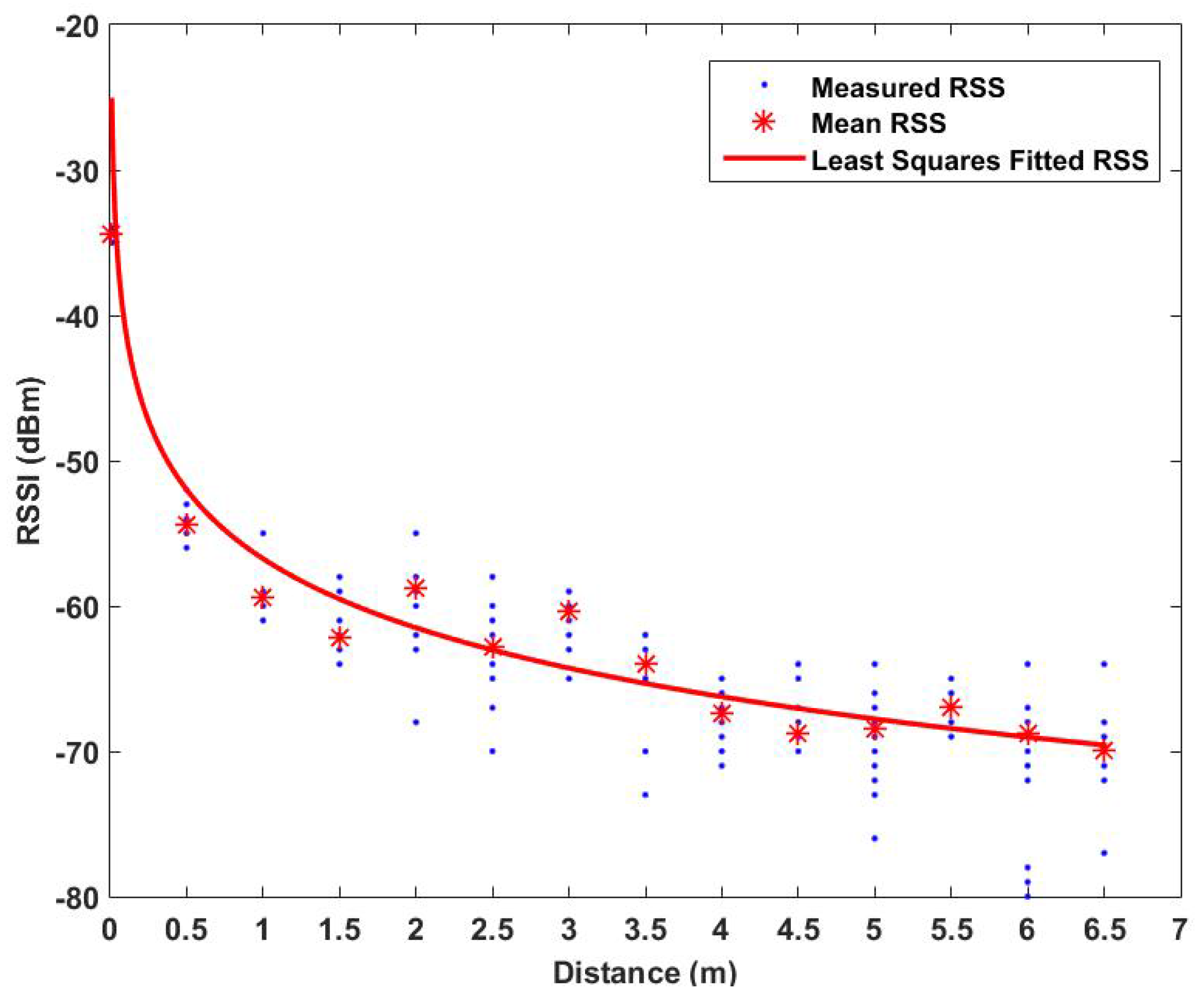
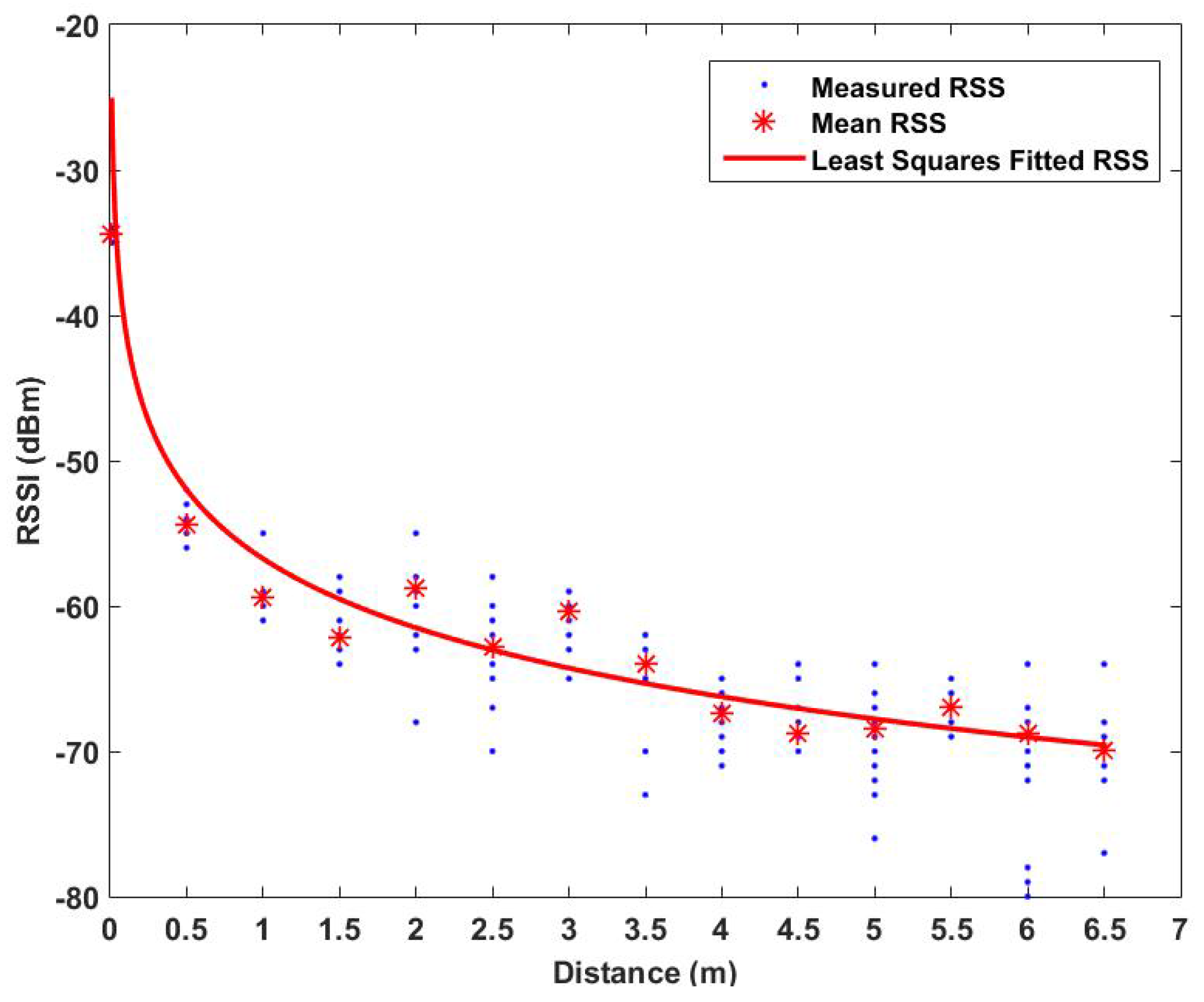
4.4. Semi-Outdoors (iBeacon)
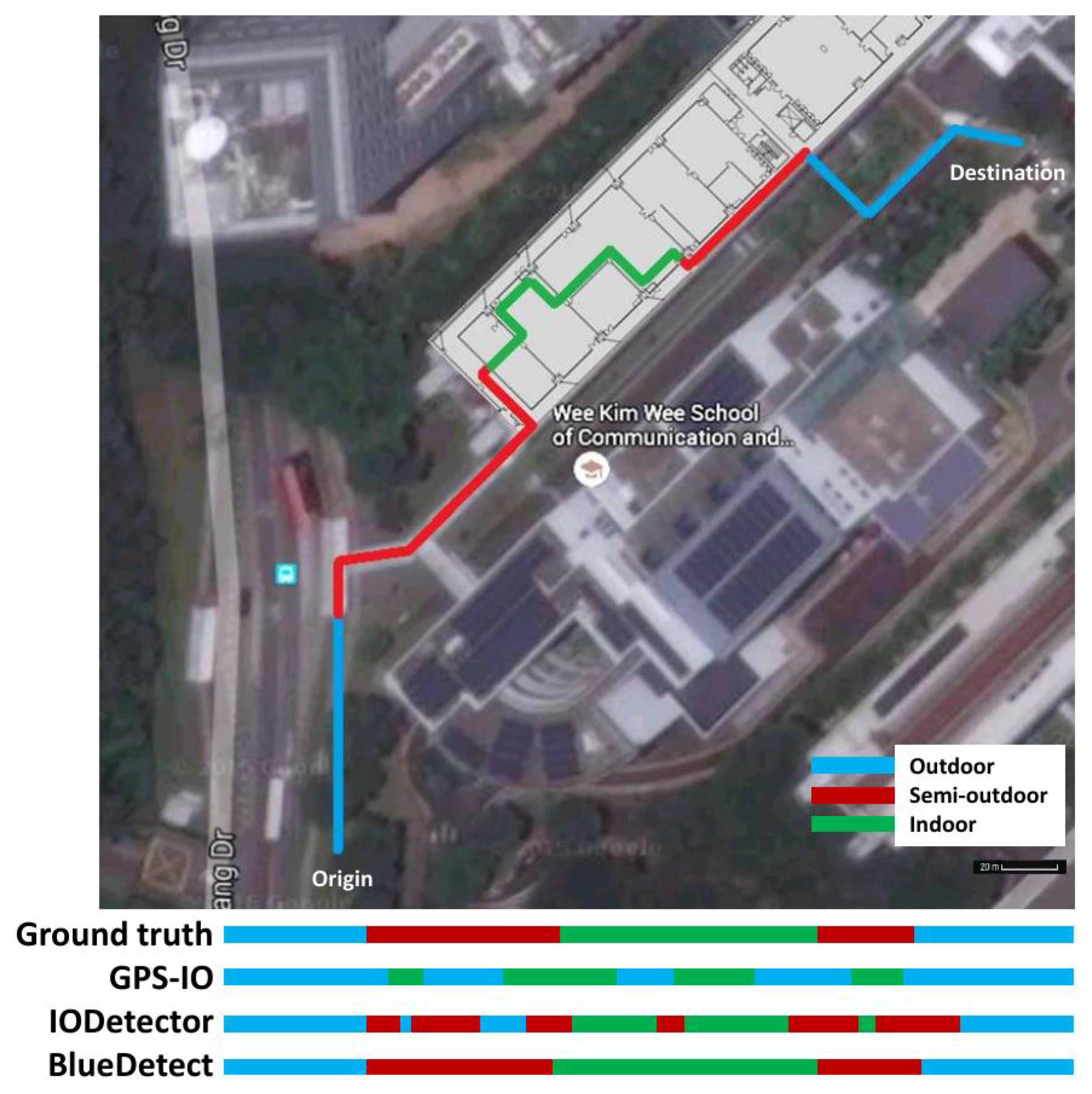
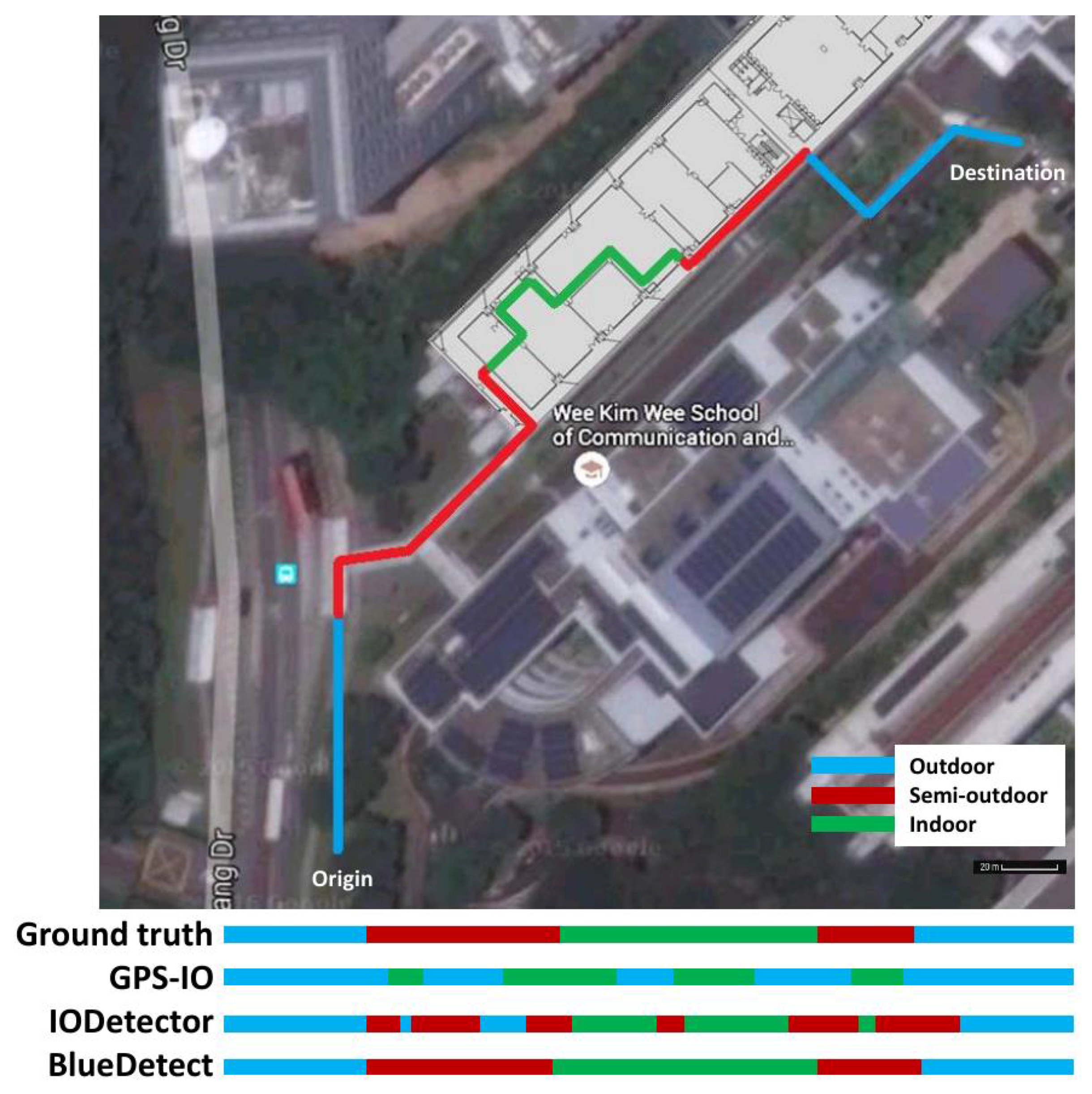
5. Evaluation
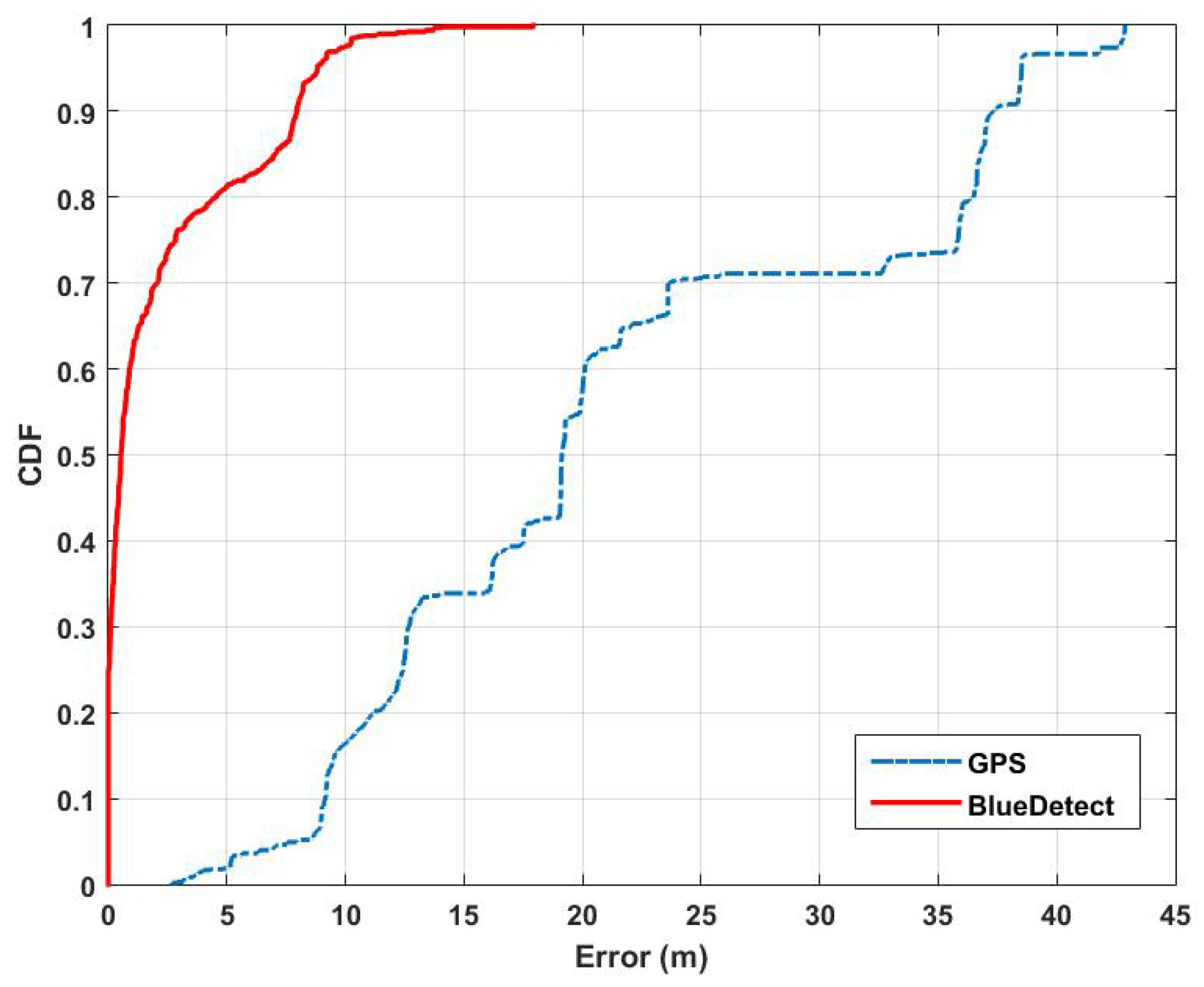
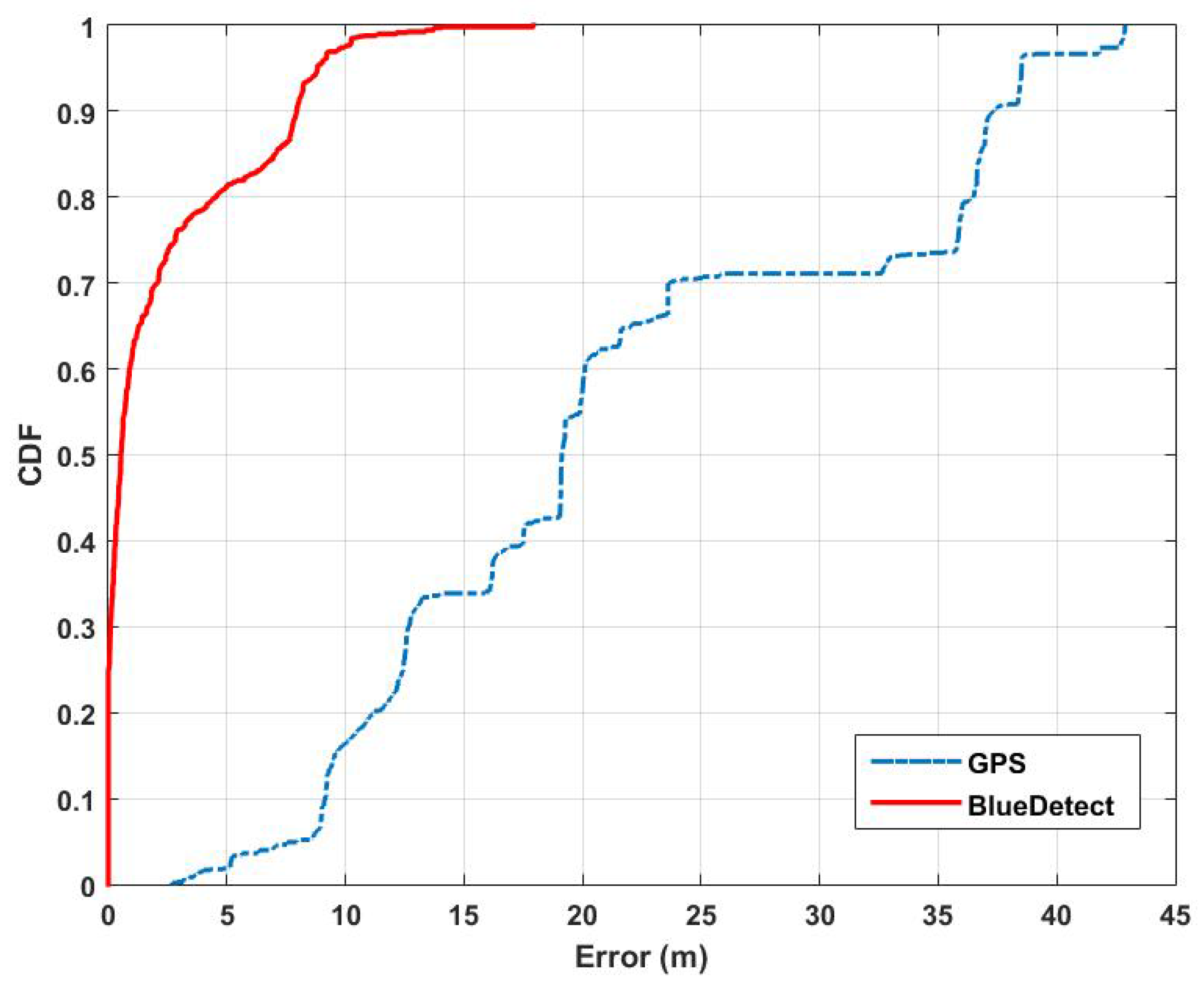
5.1. IO Detection Accuracy of BlueDetect
5.2. Localization Accuracy of BlueDetect in Semi-Outdoor Environments
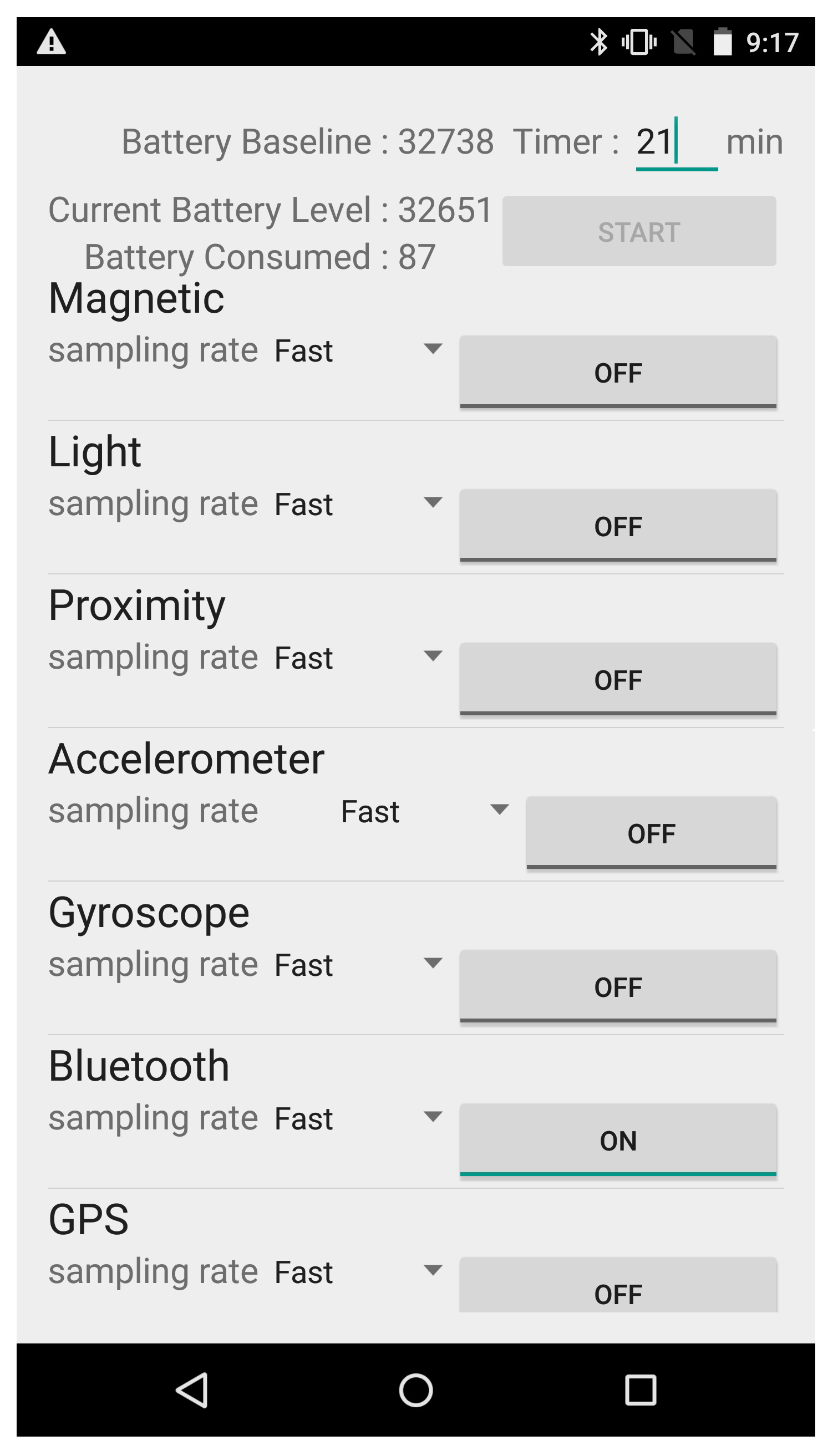
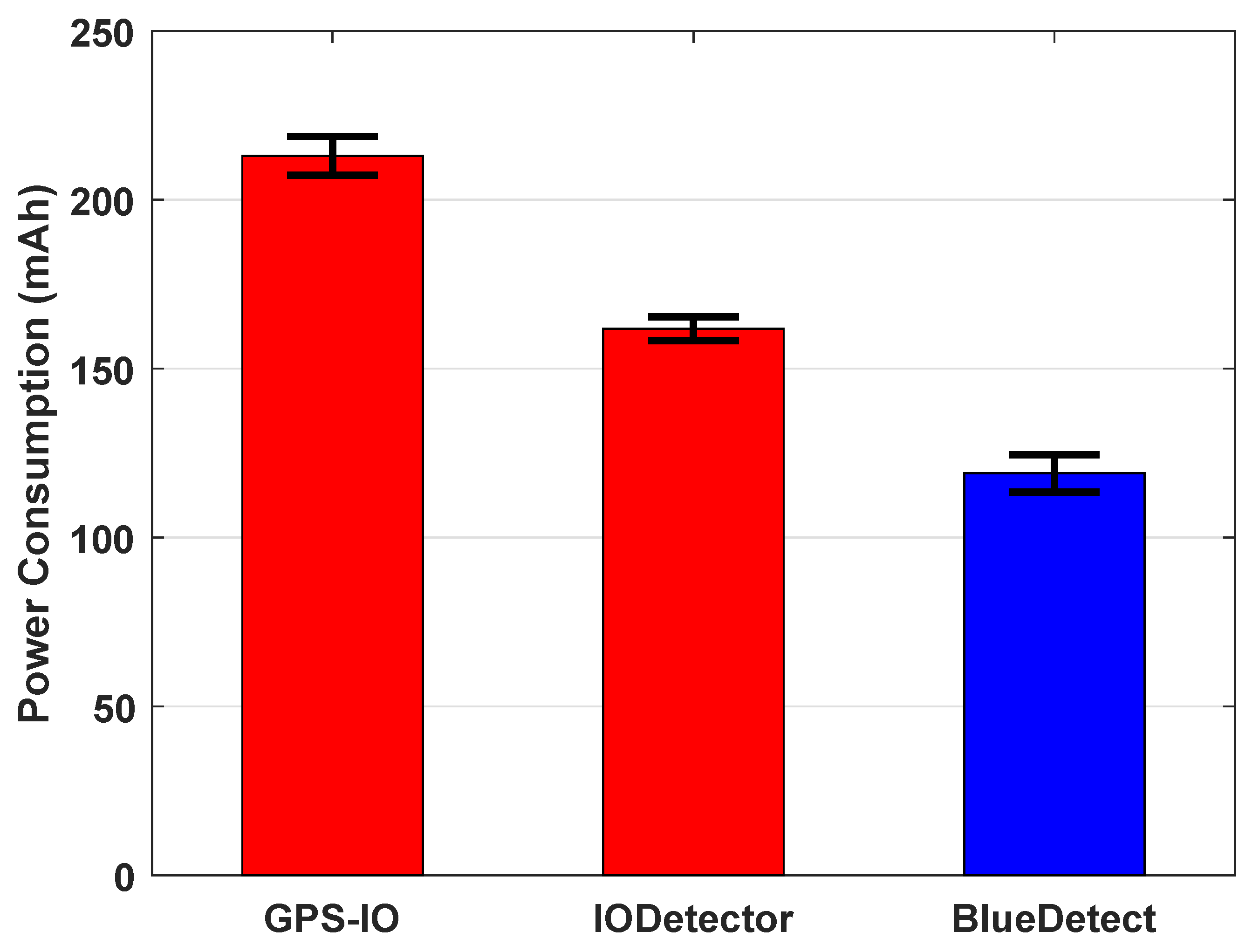
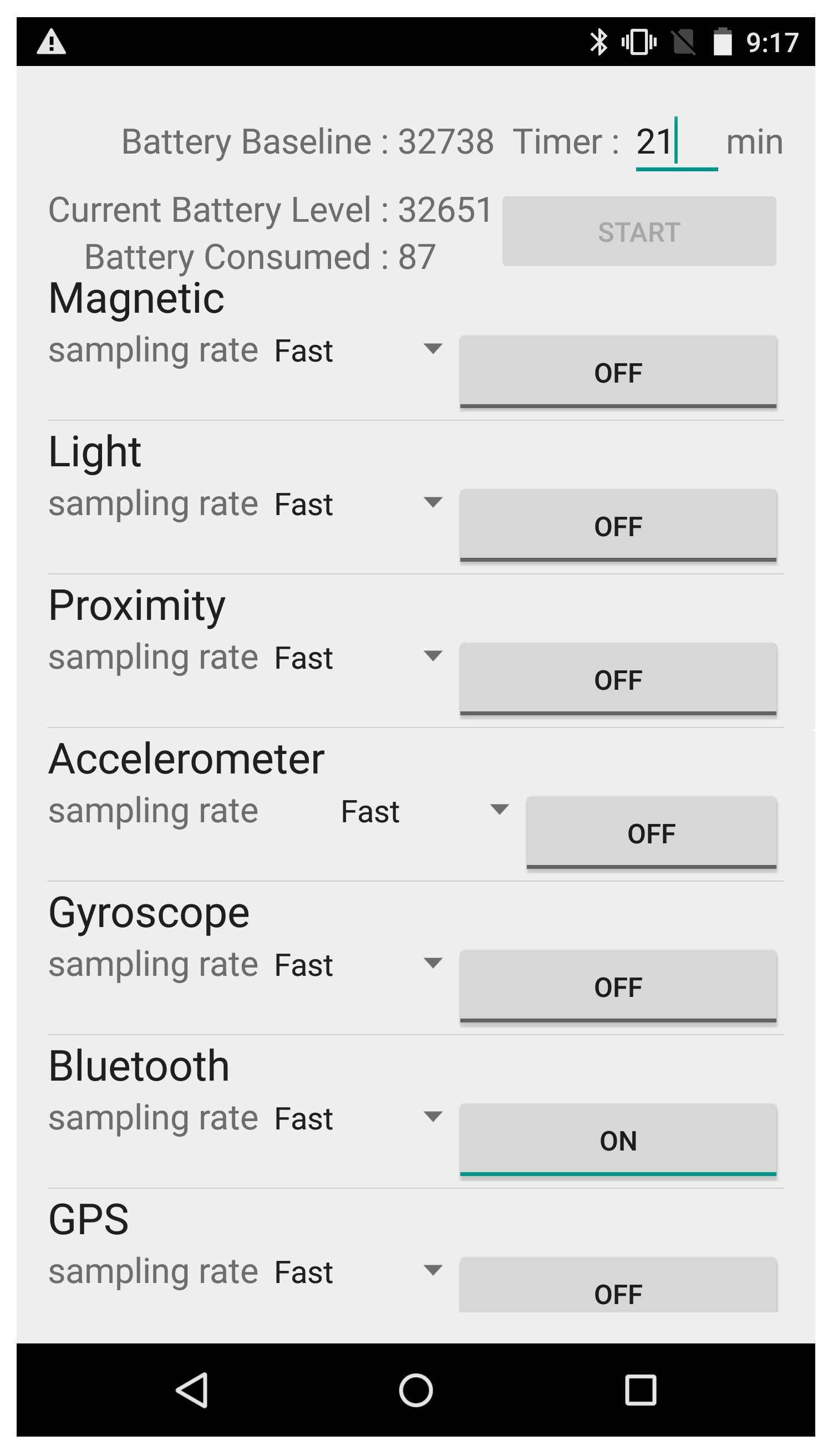
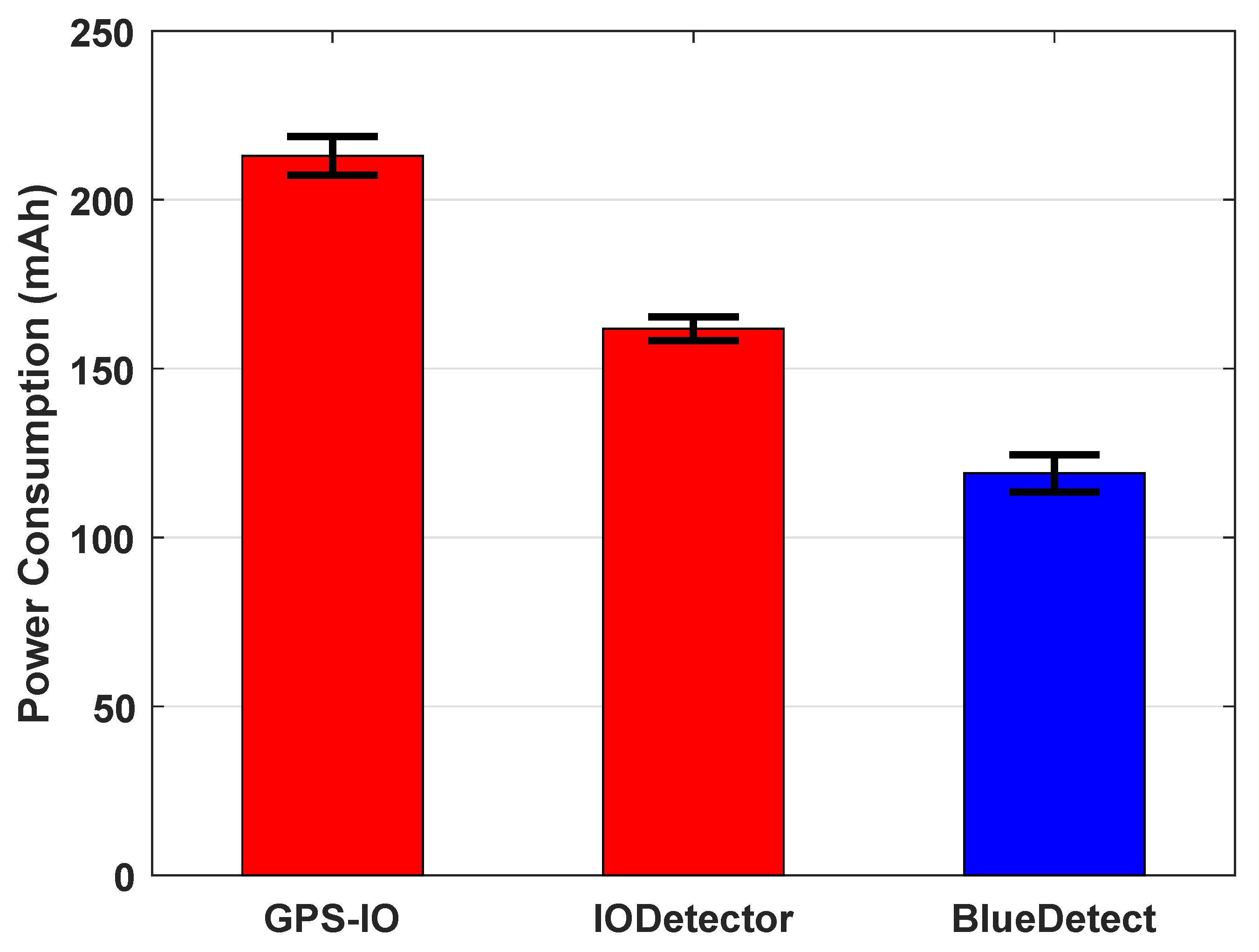
5.3. Power Consumption of BlueDetect
6. Conclusion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Keally, M.; Zhou, G.; Xing, G.; Wu, J.; Pyles, A. Pbn: Towards practical activity recognition using smartphone-based body sensor networks. In Proceedings of the 9th ACM Conference on Embedded Networked Sensor Systems, Seattle, WA, USA, 1–4 November 2011; pp. 246–259.
- Balaji, B.; Xu, J.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy based HVAC actuation using existing WiFi infrastructure within commercial buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 11–13 November 2013.
- Buchli, B.; Sutton, F.; Beutel, J. GPS-equipped wireless sensor network node for high-accuracy positioning applications. In Wireless Sensor Networks; Springer: Berlin Heidelberg, Germany, 2012; pp. 179–195. [Google Scholar]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surveys Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Zou, H.; Xie, L.; Jia, Q.S.; Wang, H. Platform and algorithm development for a rfid-based indoor positioning system. Unmanned Syst. 2014, 2, 279–291. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784.
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Low Wood Bay, Lake District, UK, 25–29 June 2012; pp. 197–210.
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304.
- Zou, H.; Huang, B.; Lu, X.; Jiang, H.; Xie, L. A Robust Indoor Positioning System Based on the Procrustes Analysis and Weighted Extreme Learning Machine. IEEE Trans. Wireless Commun. 2016, 15, 1252–1266. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; pp. 205–218.
- Jia, R.; Jin, M.; Chen, Z.; Spanos, C.J. SoundLoc: Accurate room-level indoor localization using acoustic signatures. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 186–193.
- Mandal, A.; Lopes, C.V.; Givargis, T.; Haghighat, A.; Jurdak, R.; Baldi, P. Beep: 3D indoor positioning using audible sound. In Proceedings of the IEEE 2nd Consumer Communications and Networking Conference, Las Vegas, NV, USA, 3–6 January 2005; pp. 348–353.
- Ens, A.; Höflinger, F.; Wendeberg, J.; Hoppe, J.; Zhang, R.; Bannoura, A.; Reindl, L.M.; Schindelhauer, C. Acoustic self-calibrating system for indoor smart phone tracking. Int. J. Navig. Observ. 2015, 2015, 1–9. [Google Scholar] [CrossRef]
- Haverinen, J.; Kemppainen, A. Global indoor self-localization based on the ambient magnetic field. Robot. Auton. Syst. 2009, 57, 1028–1035. [Google Scholar] [CrossRef]
- Zhang, C.; Subbu, K.P.; Luo, J.; Wu, J. GROPING: Geomagnetism and cROwdsensing Powered Indoor NaviGation. IEEE Trans. Mob. Comput. 2015, 14, 387–400. [Google Scholar] [CrossRef]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surveys Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Conte, G.; De Marchi, M.; Nacci, A.A.; Rana, V.; Sciuto, D. BlueSentinel: A first approach using iBeacon for an energy efficient occupancy detection system. In Proceedings of the 1st ACM International Conference on Embedded Systems For Energy-Efficient Buildings (BuildSys), Memphis, TN, USA, 3–6 November 2014.
- Chintalapudi, K.; Padmanabha Iyer, A.; Padmanabhan, V.N. Indoor localization without the pain. In Proceedings of the Sixteenth Annual International Conference on Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010; pp. 173–184.
- Zhou, P.; Zheng, Y.; Li, Z.; Li, M.; Shen, G. Iodetector: A generic service for indoor outdoor detection. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, Toronto, ON, USA, 6–9 November 2012; pp. 113–126.
- iBeacon for Developers. Available online: https://developer.apple.com/ibeacon/ (accessed on 22 October 2015).
- Zou, H. Seamless Indoor Outdoor Navigation. Available online: https://www.youtube.com/watch?v=HPOtwv15sHs (accessed on 22 October 2015).
- Ravindranath, L.; Newport, C.; Balakrishnan, H.; Madden, S. Improving wireless network performance using sensor hints. In Proceedings of the 8th USENIX Conference on Networked Systems Design and Implementation, San Jose, CA, USA, 15 February 2011.
- Thiagarajan, A.; Ravindranath, L.; LaCurts, K.; Madden, S.; Balakrishnan, H.; Toledo, S.; Eriksson, J. VTrack: Accurate, energy-aware road traffic delay estimation using mobile phones. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems, Berkeley, CA, USA, 4–6 November 2009; pp. 85–98.
- Radu, V.; Katsikouli, P.; Sarkar, R.; Marina, M.K. A semi-supervised learning approach for robust indoor-outdoor detection with smartphones. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014; pp. 280–294.
- Otsason, V.; Varshavsky, A.; LaMarca, A.; De Lara, E. Accurate GSM indoor localization. In UbiComp 2005: Ubiquitous Computing; Springer: Berlin Heidelberg, Germany, 2005; pp. 141–158. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C: Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Lymberopoulos, D.; Liu, J.; Yang, X.; Choudhury, R.R.; Handziski, V.; Sen, S. A realistic evaluation and comparison of indoor location technologies: Experiences and lessons learned. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Vienna, Austria, 11–14 April 2015; pp. 178–189.
- Want, R.; Hopper, A.; Falcao, V.; Gibbons, J. The active badge location system. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Rome, Italy, 16–21 July 2000; pp. 32–43.
- Addlesee, M.; Curwen, R.; Hodges, S.; Newman, J.; Steggles, P.; Ward, A.; Hopper, A. Implementing a sentient computing system. Computer 2001, 34, 50–56. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Jeong, Y.; Shin, H.; Win, M.Z. Machine learning for wideband localization. IEEE J. Sel. Areas Commun. 2015. [Google Scholar] [CrossRef]
- Heydon, R. Bluetooth Low Energy: The Developer’s Handbook; Prentice Hall: Upper Saddle River, NJ, USA, 2012. [Google Scholar]
- Zou, H.; Lu, X.; Jiang, H.; Xie, L. A fast and precise indoor localization algorithm based on an online sequential extreme learning machine. Sensors 2015, 15, 1804–1824. [Google Scholar] [CrossRef] [PubMed]
- Aislelabs. The Hitchhikers Guide to iBeacon Hardware: A Comprehensive Report by Aislelabs (2015). Available online: http://www.aislelabs.com/reports/beacon-guide/ (accessed on 22 October 2015).
- Estimote. Available online: https://estimote.com (accessed on 22 October 2015).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Suitable Environment | Localization Accuracy | Extra Device on User-Side | Power Consumption | Cost |
|---|---|---|---|---|---|
| GPS | Outdoor | 10 m | No | High | Moderate |
| GSM (cellular) | Outdoor and indoor | 10–50 m | No | Low | Low |
| Infrared | Indoor | 0.5–3 m | Yes | Low | Moderate |
| Acoustic signal | Indoor | 30–80 cm | No | Low | Moderate |
| RFID | Indoor | 1–3 m | Yes | Low | Moderate |
| UWB | Indoor | 10–50 cm | Yes | Low | High |
| PDR | Indoor and outdoor | 1–5 m | No | High | Low |
| WiFi | Indoor | 2–5 m | No | High | Low |
| BLE (iBeacon) | Indoor and semi-outdoor | 1–5 m | No | Low | Low |
| Distance from the Beacon | |||||||||
| (m) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Line-of-Sight (LOS) | |||||||||
| (dBm) | −59 | −62 | −64 | −66 | −68 | −70 | −72 | −75 | −79 |
| None-Line-of-Sight (NLOS) | |||||||||
| (dBm) | −63 | −66 | −68 | −69 | −72 | −75 | −77 | −80 | −83 |
| Distance from the Beacon (m) | Orientation (dBm) | Orientation (dBm) | Orientation (dBm) | Orientation (dBm) |
|---|---|---|---|---|
| 1 | −59 | −60 | −63 | −59 |
| 2 | −62 | −63 | −66 | −61 |
| 3 | −64 | −66 | −68 | −63 |
| 4 | −66 | −68 | −69 | −67 |
| 5 | −68 | −71 | −72 | −70 |
| 6 | −70 | −72 | −75 | −72 |
| 7 | −72 | −73 | −77 | −74 |
| 8 | −75 | −77 | −80 | −76 |
| 9 | −79 | −81 | −83 | −80 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, H.; Jiang, H.; Luo, Y.; Zhu, J.; Lu, X.; Xie, L. BlueDetect: An iBeacon-Enabled Scheme for Accurate and Energy-Efficient Indoor-Outdoor Detection and Seamless Location-Based Service. Sensors 2016, 16, 268. https://doi.org/10.3390/s16020268
Zou H, Jiang H, Luo Y, Zhu J, Lu X, Xie L. BlueDetect: An iBeacon-Enabled Scheme for Accurate and Energy-Efficient Indoor-Outdoor Detection and Seamless Location-Based Service. Sensors. 2016; 16(2):268. https://doi.org/10.3390/s16020268
Chicago/Turabian StyleZou, Han, Hao Jiang, Yiwen Luo, Jianjie Zhu, Xiaoxuan Lu, and Lihua Xie. 2016. "BlueDetect: An iBeacon-Enabled Scheme for Accurate and Energy-Efficient Indoor-Outdoor Detection and Seamless Location-Based Service" Sensors 16, no. 2: 268. https://doi.org/10.3390/s16020268
APA StyleZou, H., Jiang, H., Luo, Y., Zhu, J., Lu, X., & Xie, L. (2016). BlueDetect: An iBeacon-Enabled Scheme for Accurate and Energy-Efficient Indoor-Outdoor Detection and Seamless Location-Based Service. Sensors, 16(2), 268. https://doi.org/10.3390/s16020268