
Definition of an Enhanced Map-Matching Algorithm for Urban Environments with Poor GNSS Signal Quality




Abstract
:1. Introduction
2. Map Matching Algorithm Proposal
2.1. Specifications
- The algorithm should be implemented in real time and with limited computational means.
- The algorithm is based on satellite positioning and digital map data, without using inertial sensors because these will limit its implementation in after-market devices.
- Optionally, it will include the possibility to use speed information, if it is available, to know when the vehicle is moving and when not. Using inertial sensors for speed and yaw angle could improve the final results but could increase the hardware cost if high performance sensors are integrated [4]. Furthermore, the aim is to develop an algorithm that could be implemented in any navigation device, and not all of them contain these sensors, even low performance ones.
- The information contained in the digital map has to be as simple as possible. The necessary information includes x-y coordinates, the legal turns and the segments priority.
- After making a change of segment, the algorithm should check for some time if it has been a good decision or if the vehicle needs to be relocated to another link.
- The algorithm should recover the positioning of the vehicle quickly after long periods of time without GPS coverage.
- In the event of an error in the positioning of the vehicle in a link, the algorithm should be able to detect the erroneous decision and correct it in a few seconds taking into account the previous correct location.
- The algorithm should be capable of working even with degraded GNSS signals.
2.2. Description
- Candidate segments and links definition
- Preliminary segment selection:Topological and historical links parameters and final weight calculation of the segments
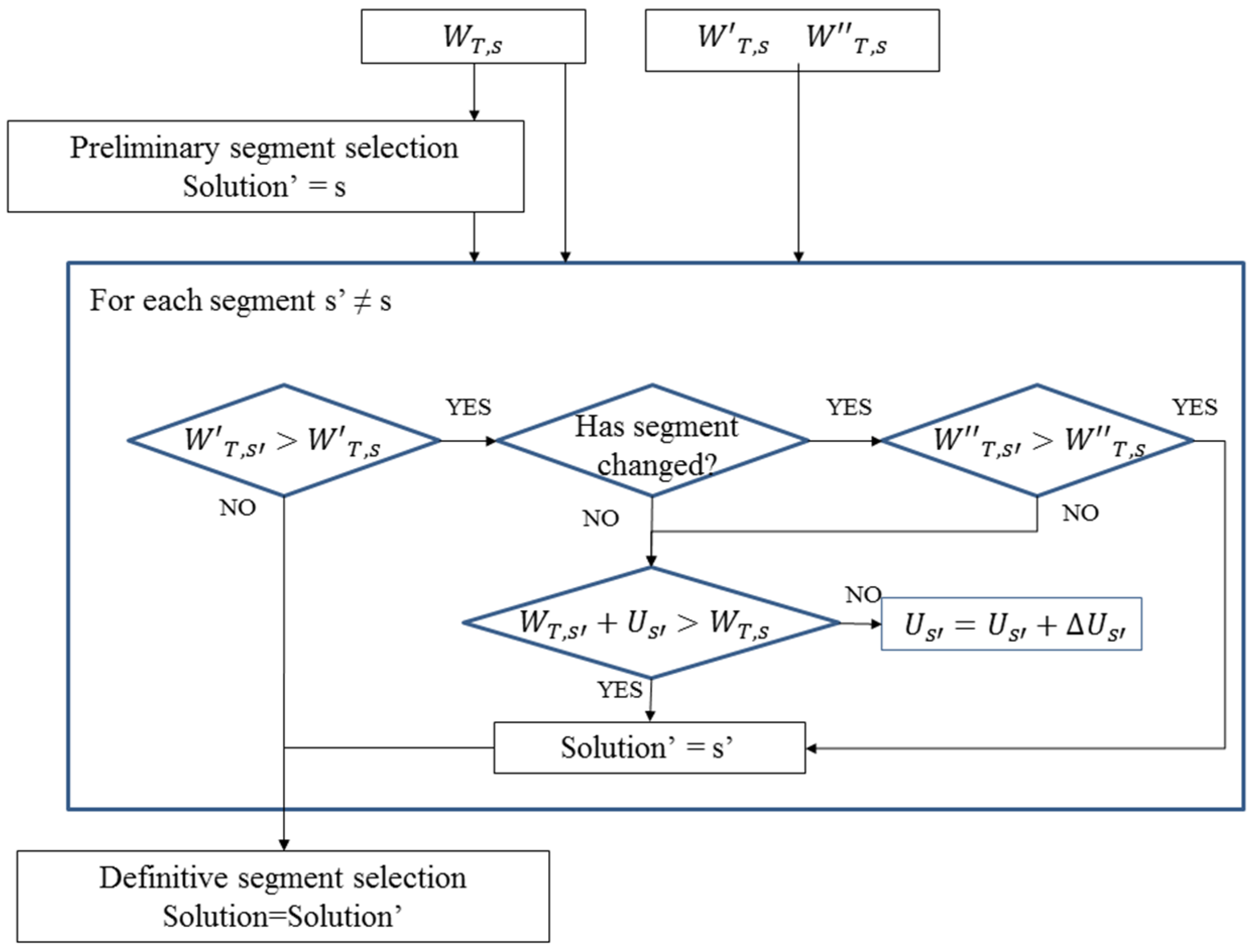
- Definitive segment selection: (1) Correction of the belonging parameter impact; (2) Correction of inappropriate segment change
- Vehicle positioning on the digital map
2.2.1. Step 1: Candidate Segments and Links Definition
2.2.2. Step 2: Preliminary Segment Selection
- Distance parameters:
- Point-to-point average distance parameter: It uses the average distance between the two extreme points of the candidate link and the location given by the GNSS receiver. This value is useful to improve situations where the perpendicular distance is small but the link is not actually near the GNSS location.
- Perpendicular distance parameter: It uses the perpendicular distance between the GNSS positioning and the line that contains the candidate link.
- Parameters depending on the movement history:
- Direction parameter: It compares the difference between the GNSS trajectory and the link trajectory by calculating the angle between them. To estimate the trajectory of the vehicle the last GPS positions are taken into account, instead of just using the last two. Should the GNSS reception losses be longer than 1 s, this parameter decreases its relevance linearly because its relevance is lower as the time without the GNSS signal increases.
- Segment belonging parameter: It assigns values to the candidate links according to their priority in a hypothetical junction (stored in the digital map information) and penalizes those links that are not physically accessible or those that involve illegal turns. At a junction, those links that involve going straight (keeping in the same street that is, not doing any turns) are considered priority links and get a higher value than those legal turns not considered priority links. The illegal turns receive a negative value to penalize them and avoid their being taken as the vehicle location by the algorithm. However, if the user makes an illegal turn, the algorithm will locate the vehicle correctly after a few seconds. Finally, the links that belong to the segment where the vehicle was positioned before receive the highest value. Like the Direction parameter, should the GNSS reception losses be longer than 1 s, this parameter decreases its relevance linearly because its relevance is lower as the time without the GNSS signal increases.
- Additional parameter for segments:
- Perpendicular parameter: An additional value is assigned to a candidate segment in case the perpendicular projection of the GNSS point on one of the lines defined by each candidate link is among the two points of the digital map that define the link.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ||
|---|---|---|
| Point-to-point distance | (1) | |
| Perpendicular distance | (2) | |
| Direction | (3) | |
| Belonging | (4) | |
| Perpendicularity | (5) | |
| Segment s Final Weight | ||
| (6) | ||
| Distance between the GNSS point and link k | |
| Angle between the GNSS trajectory and the link k trajectory | |
| Denotes link k priority | |
| Number of candidate links contained in segment s | |
| Parameter coefficients |
2.2.3. Step 3: Definitive Segment Selection:
2.2.4. Step 4: Vehicle Positioning on the Digital Map
- If any of the candidate links of the chosen segment contain the perpendicular projection of the GNSS positioning between their two extremes, then this point is used to locate the vehicle.
- If the condition above does not apply for any link, the nearest point of the digital map to the GNSS-generated point that belongs to the selected segment is assigned to locate the vehicle.
3. Practical Application
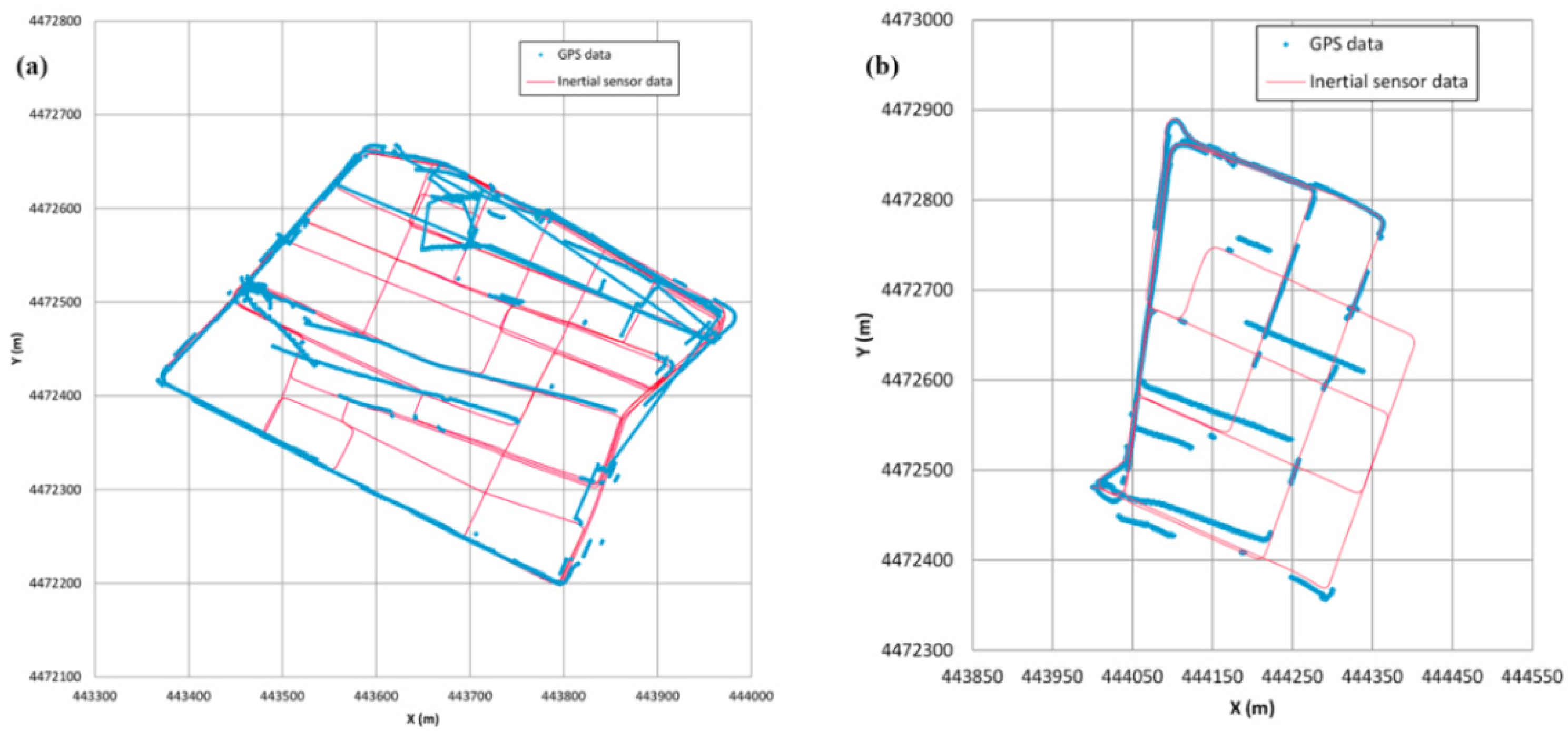
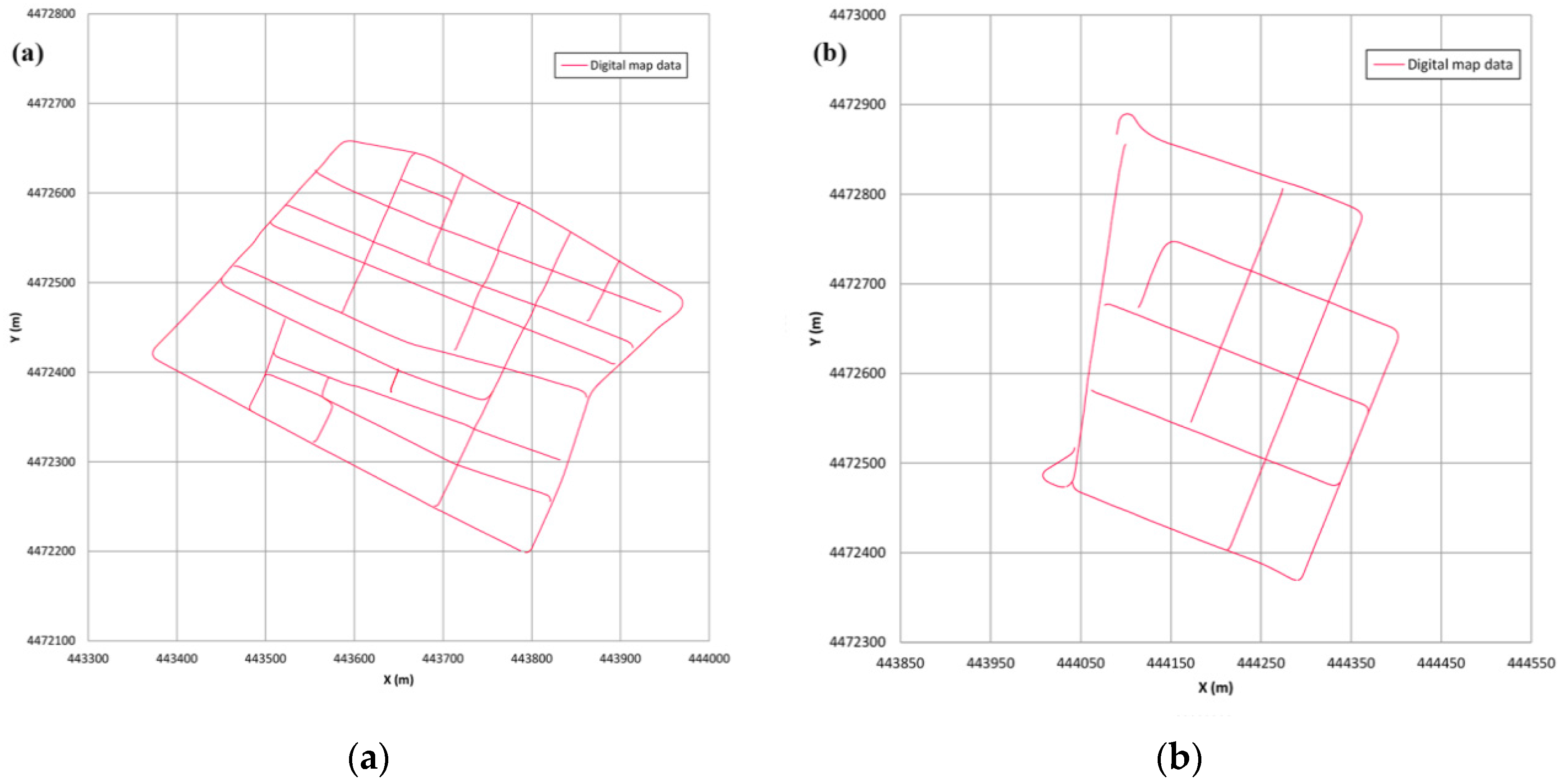
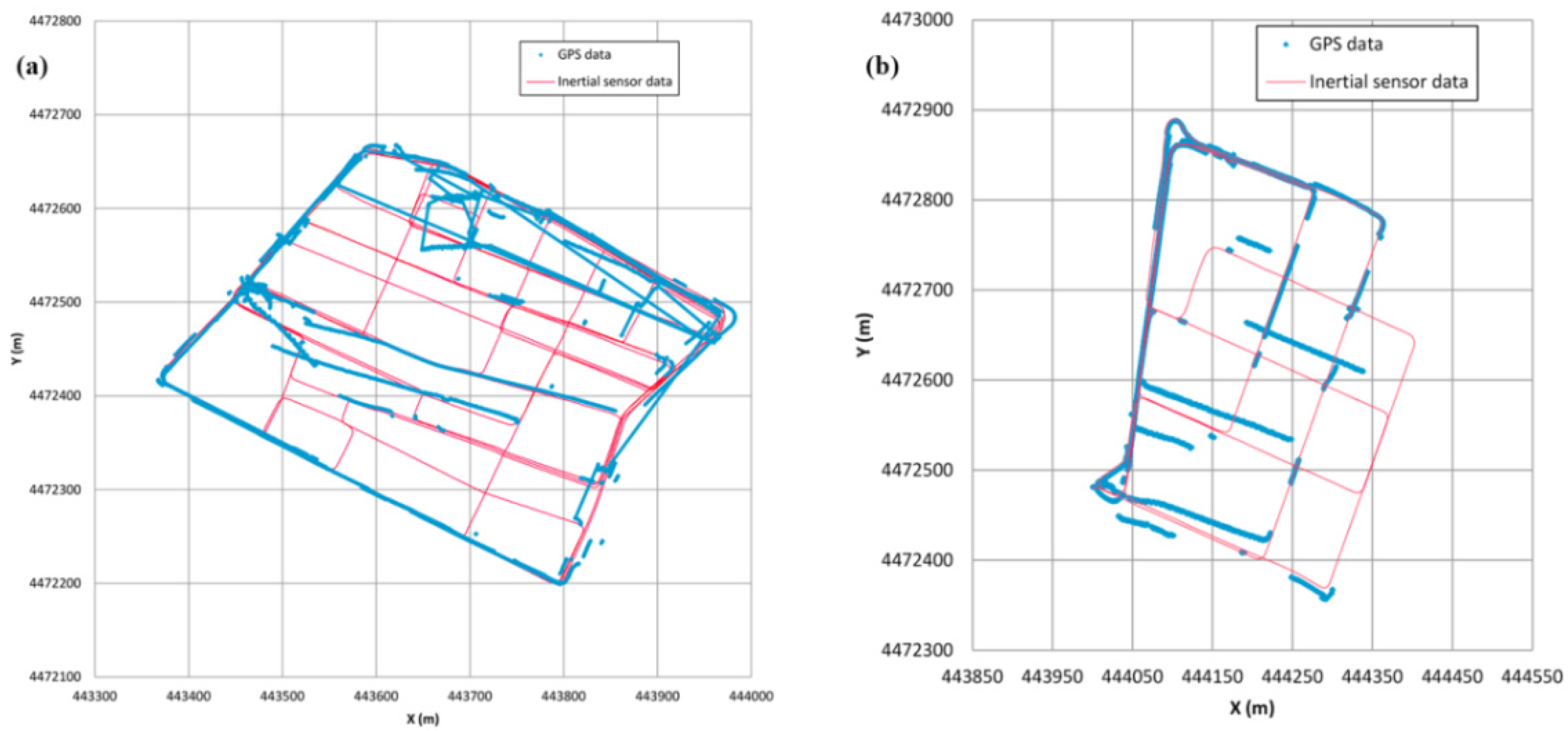
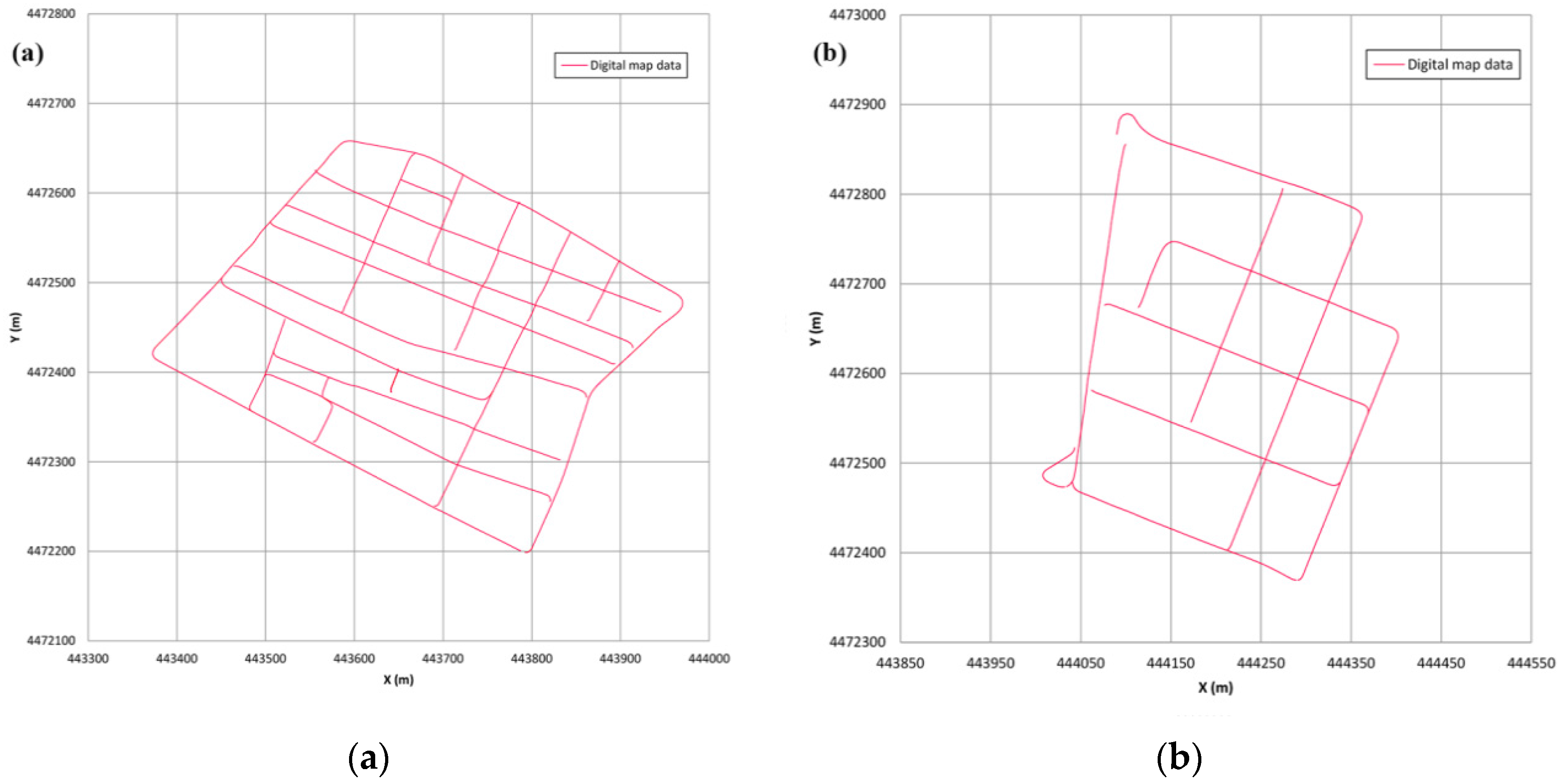
3.1. Urban Scenario and Digital Map

- Inertial measurement system: (1) Correvit L-CE- non-contact speed sensor to measure speed and the distance travelled; (2) RMS FES 33 gyroscopic platform to provide measurement of the angles drawn about three axes.
- Astech G12 GPS autonomous receiver with an update frequency of 10 Hz.
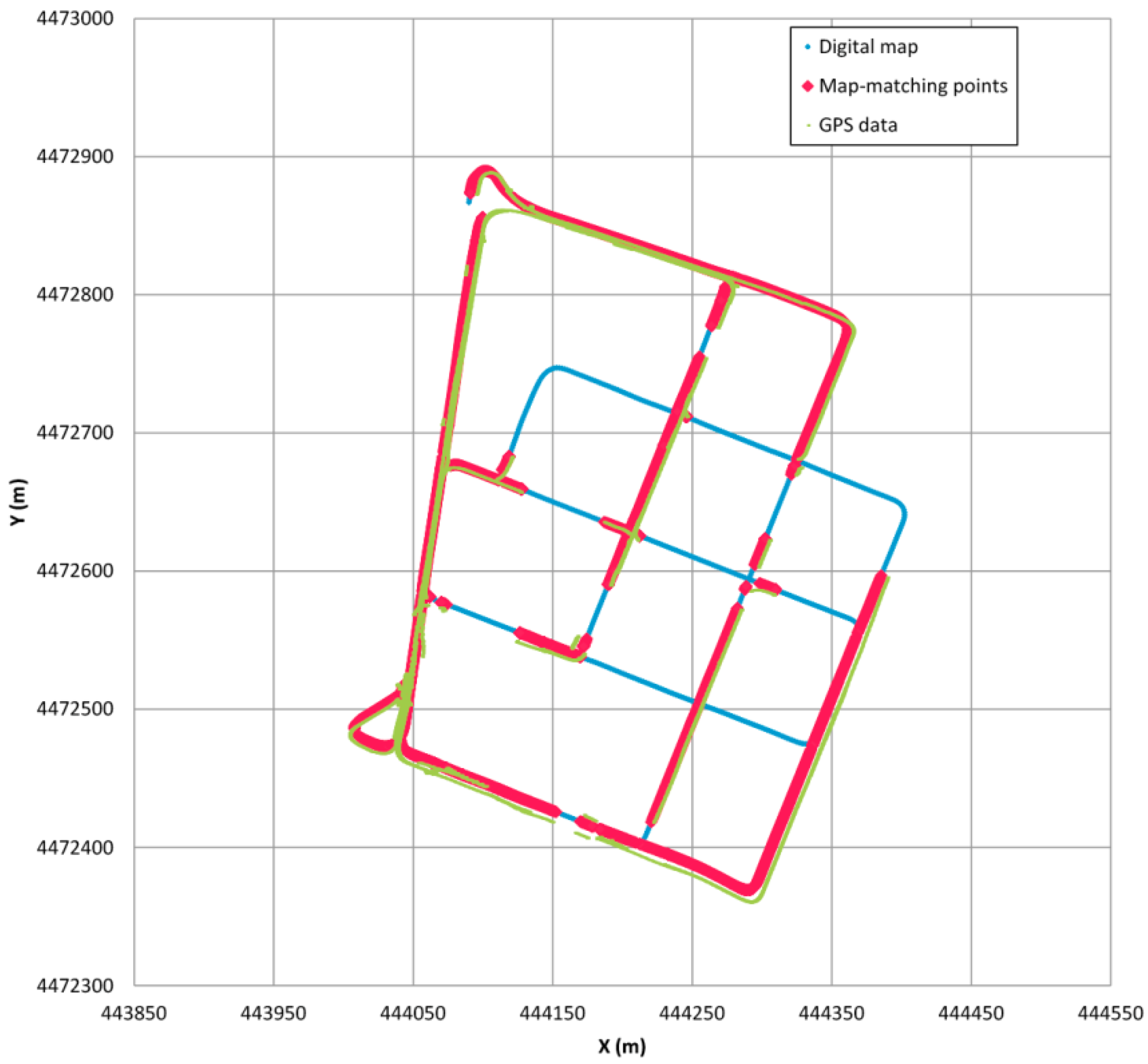
3.2. Results of the Map Matching Algorithm
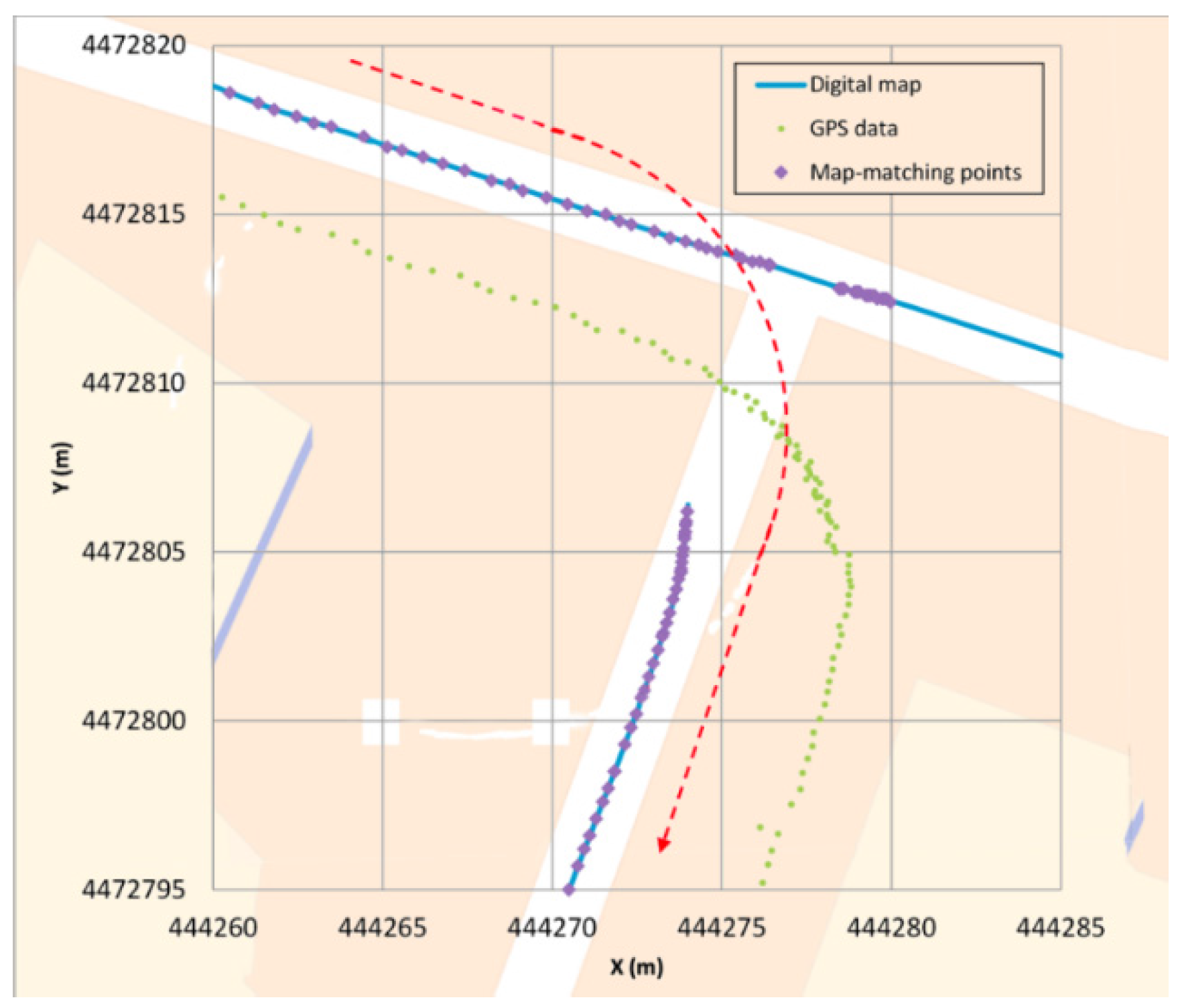
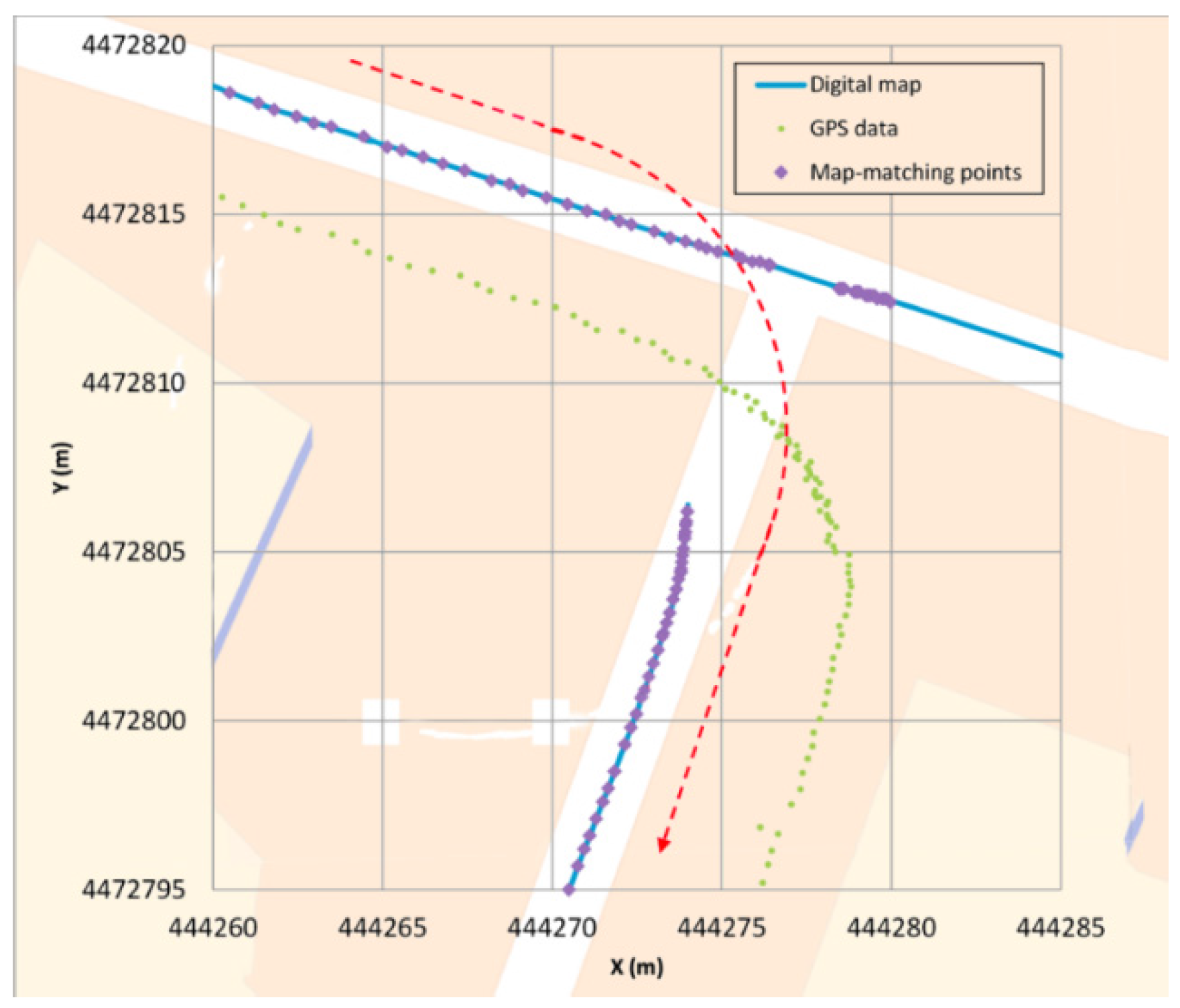
- Type I: The first error (Figure 6) occurs when a junction is crossed and a legal turn is made instead of going straight. Since the priority link at this scenario is, in general, the one that involves going straight (hence, getting a higher belonging value) if the positioning generated by the GPS is not quite accurate, it could occur that for a few GPS points the algorithm locates the vehicle in an incorrect link (the one that goes straight). However, when the direction of the GPS points is parallel to the segment where the vehicle actually is, and when the vehicle moves away from the junction, the algorithm changes and locates the vehicle in the correct link. This error is quite unusual and the algorithm restores the correct positioning in a short period of time.
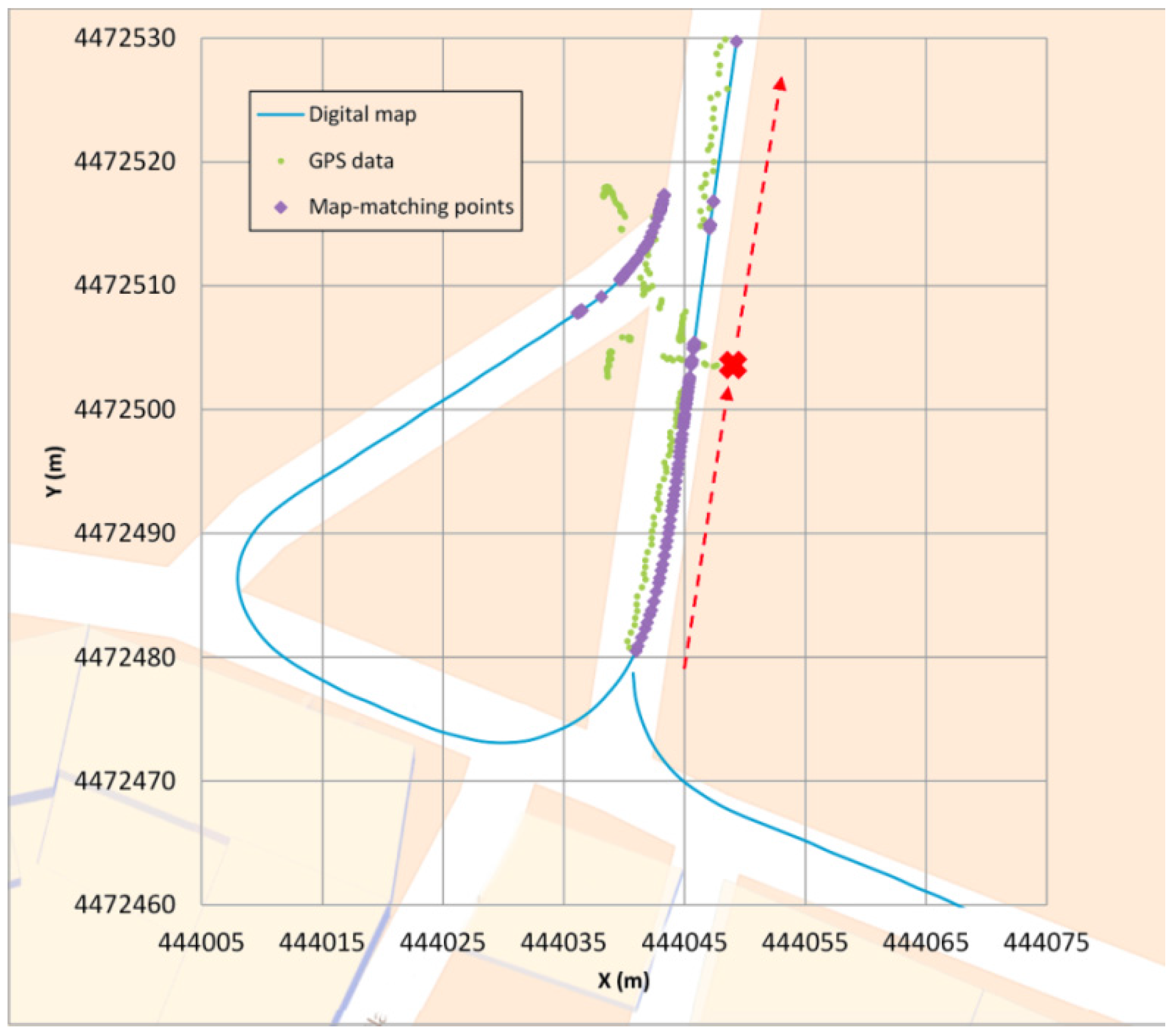
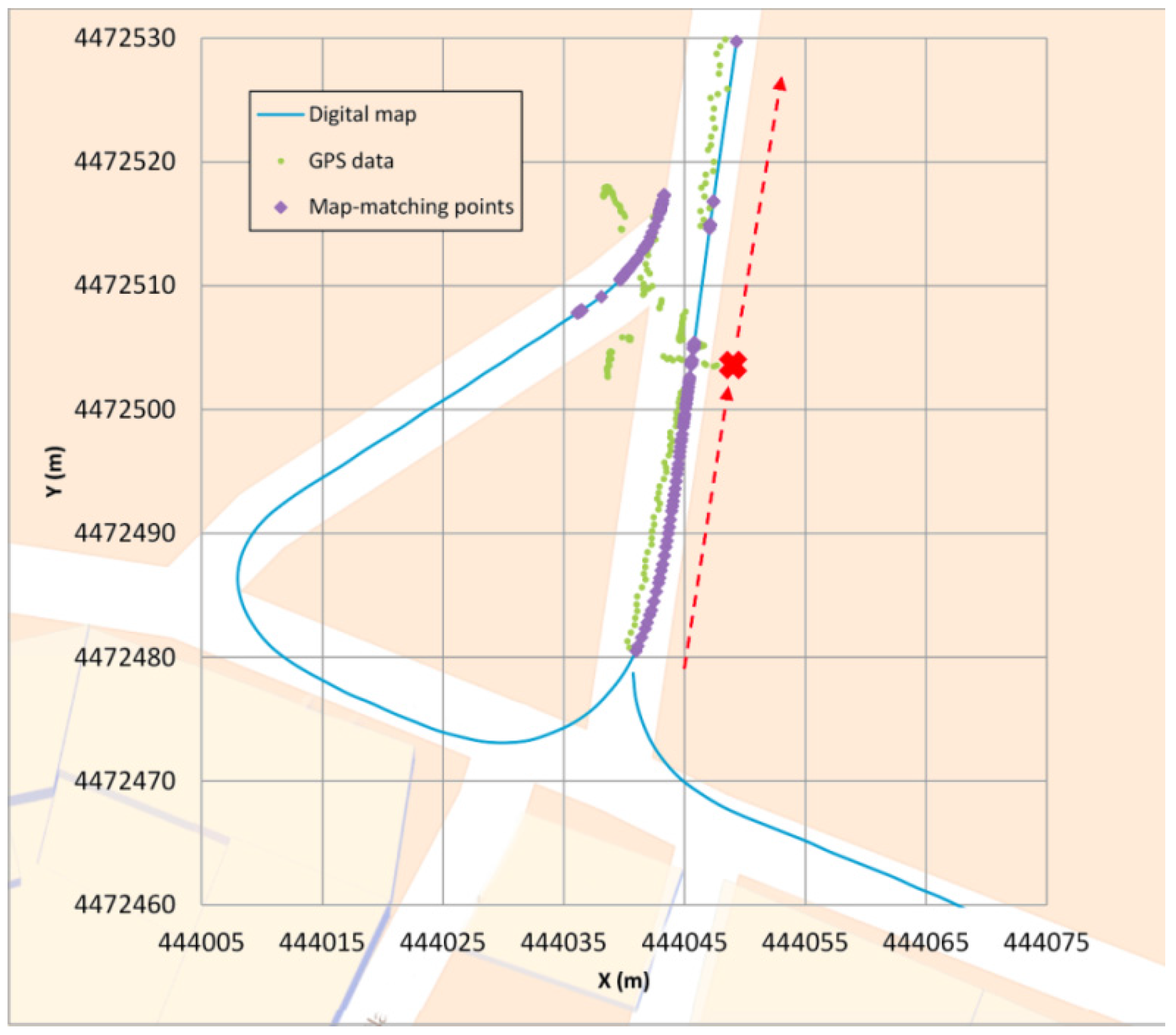
- Type II: The second error (Figure 7) occurs when the GPS coverage is lost for a period of time and gets back near a junction and the algorithm decides incorrectly which segment is the good one after the vehicle turn. In this case, the map-matching process is performed as if it were the initial point. In some cases, this causes a mismatching, although after a few seconds the algorithm corrects its mistake locating the vehicle in the correct link. After losing the GPS signal, if the vehicle is in another segment when the signal is recovered and the belonging value does not decrease its weight, this could make the algorithm mismatch the position of the vehicle. After GPS positioning is recovered, the algorithm locates the vehicle in the incorrect segment because it is a priority link (taking into account the segment where the vehicle was located before) and after a few points it changes to the other segment, which is obviously where the car is. This error is quite unusual and the algorithm restores the correct positioning in a short period of time.
- Type III: The third error (Figure 8) occurs when the vehicle is not moving. In these cases the GPS position fixes could appear scattered and if the vehicle is near a junction, they could get closer to another link than the one in which the vehicle is stopped, eventually changing its matching position. Also, if the stop takes a long time, when the vehicle starts to move again the algorithm is not yet considering the possibility of relocating the vehicle (this only happens for a few seconds after a change of segment is made) so it will take more time to relocate the vehicle correctly than in the other errors. It is important to point out that this kind of error can be solved by taking into account the speed information, even if it is not too accurate. It should also be pointed out that the 11.8 s error that appears in Table 3 does not occur when the vehicle is moving but is solved when the vehicle starts moving, but it takes more time than in the other errors to relocate the vehicle (around 3 s).
| Test Area 1 | Test Area 2 | ||
|---|---|---|---|
| Test duration (s) | 1060.0 | 1050.1 | |
| GPS signal availability (%) | 61.2% | 61.1% | |
| -- | # error appears (without speed information / with speed information) | # error appears (without speed information / with speed information) | longest duration (s) |
| Error type I | 4 / 4 | 2 / 2 | 2.1 / 2.1 |
| Error type II | 3 / 3 | 2 / 2 | 1.6 / 1.6 |
| Error type III | 7 / 2 | 3 / 2 | 11.8 / 3.0 |

- The algorithm does not mismatch the vehicle’s position when the GPS inputs have large errors in positioning.
- After a change of segment when locating the vehicle, the algorithm considers the possibility of being mistaken and analyses other solutions for a few points after the change is made. Therefore, this allows it to relocate the vehicle if necessary.
- Knowing that the vehicle is stopped could significantly improve the results, even without knowing the speed of the vehicle with high accuracy. This allows the algorithm to eliminate the error that can be introduced by the spreading of the GPS signal, which in bad conditions of GPS coverage could be quite high.
- The perpendicular distance value penalizes those digital maps with a high density of points, that is, with little distance between them, as in the map used in this research, improving the results if this distance is higher, which is more usual. However, the algorithm proved to be robust even in these unpromising circumstances.
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jiménez, F.; Naranjo, J.E. Nuevos requerimientos de precisión en el posicionamiento de vehículos para aplicaciones ADAS. Dyna 2009, 84, 245–250. [Google Scholar]
- Jiménez, F. Improvements in road geometry measurement using inertial measurement systems in datalog vehicles. Measurement 2011, 44, 102–112. [Google Scholar]
- Naranjo, J.E.; Jiménez, F.; Aparicio, F.; Zato, J. GPS and inertial systems for high precision positioning on motorways. J. Navig. 2009, 62, 351–363. [Google Scholar]
- Jiménez, F.; Naranjo, J.E.; García, F.; Armingol, J.M. Can low-cost road vehicles positioning systems fulfil accuracy specifications of new ADAS applications? J. Navig. 2011, 64, 251–264. [Google Scholar] [CrossRef]
- Chao, J.; Chen, Y.Q.; Chen, W.; Ding, X.; Li, Z.; Wang, N.; Yu, M. An experimental investigation into the performance of GPS based vehicle positioning in very dense urban areas. J. Geospatial Eng. 2001, 3, 59–66. [Google Scholar]
- Groves, P.D.; Jiang, Z.; Wang, L.; Ziebart, M.K. Intelligent Urban Positioning using Multi Constellation GNSS with 3D Mapping and NLOS Signal Detection. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, TN, USA, 17–21 September 2012.
- Groves, P.D.; Jiang, Z.; Wang, L.; Ziebart, M.K. Intelligent urban positioning, shadow matching and non-line-of-sight signal detection. In Proceedings of the 2012 6th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 5–7 December 2012.
- Bendafi, H.; Hummelsheim, K.; Sabel, H.; Van de Ven, S. Classification of Data Capturing/Production Techniques. NextMap Project Deliverable D 3.1; NextMap Consortium: Brussels, Belgium, 2000. [Google Scholar]
- Miles, J.C.; Chen, K. ITS Handbook, 2nd ed.; PIARC: Paris, France, 2004. [Google Scholar]
- Yerpez, J.; Ferrandez, F. Road Characteristics and Safety. Identification of the Part Played by Road Factors in Accident Generation; INRETS: Arcueil, France, 1986. [Google Scholar]
- Jiménez, F.; Aparicio, F.; Estrada, G. Measurement uncertainty determination and curve fitting algorithms for development of accurate digital maps for Advanced Driver Assistance Systems. Transport. Res. C Emerg. 2009, 17, 225–239. [Google Scholar]
- Hashemi, M.; Karimi, H.A. A critical review of real-time map-matching algorithms: Current issues and future directions. Comput. Environ. Urban Syst. 2014, 48, 153–165. [Google Scholar]
- Blazquez, C.A.; Miranda, P.A. A Real Time Topological Map Matching Methodology for GPS/GIS-Based Travel Behavior Studies. In Mobile Technologies for Activity-Travel Data Collection and Analysis; Rasouli, S., Timmermans, H., Eds.; Information Science Reference: Hershey, PA, USA, 2014; pp. 152–170. [Google Scholar]
- Wolf, J.; Bachman, W.; Oliveira, M.S.; Auld, J.; Mohammadian, A.; Vovsha, P. Applying GPS Data to Understand Travel Behavior. Transportation Research Board; National Cooperative Highway Research Program, Report 775: Washington, WA, USA, 2014. [Google Scholar]
- Syed, S.; Cannon, M.E. Fuzzy logic based-map matching algorithms for vehicle navigation system in urban canyons. In Proceedings of the ION National Technical Meeting, San Diego, CA, USA, 26–28 January 2004.
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transport. Res. C Emerg. 2007, 15, 312–328. [Google Scholar]
- Kim, J.S.; Lee, J.H.; Kang, T.H.; Lee, W.Y.; Kim, Y.G. Node based map-matching algorithm for car navigation system. In Proceedings of the 29th ISATA Symposium, Florence, Italy, 3–6 June 1996.
- Bernstein, D.; Kornhauser, A. An Introduction to Map-Matching For Personal Navigation Assistants; New Jersey TIDE Center: Newark, NJ, USA, 1996. [Google Scholar]
- White, C.E.; Bernstein, D.; Kornhauser, A.L. Some map-matching algorithms for personal navigation assistants. Transport. Res. C Emerg. 2000, 8, 91–108. [Google Scholar]
- Phuyal, B. Method and use of aggregated dead reckoning sensor and GPS data for map-matching. In Proceedings of the Institute of Navigation (ION) Annual Conference, Portland, OR, USA, 20–27 September 2002.
- Greenfeld, J.S. Matching GPS observations to locations on a digital map. In Proceedings of the 81st Annual Meeting of the Transportation Research Board, Washington, WA, USA, 13–17 January 2002.
- Chen, W.; Yu, M.; Li, Z.; Chen, Y.Q. Integrated vehicle navigation system for urban applications. In Proceedings of the 7th International Conference on Global Navigation Satellite Systems (GNSS), Graz, Austria, 22–25 April 2003.
- Quddus, M.A.; Ochieng, W.Y.; Zhao, L.; Noland, R.B. A general map-matching algorithm for transport telematics applications. GPS Solut. 2003, 7, 157–167. [Google Scholar]
- Blazquez, C.A.; Vonderohe, A.P. Simple map-matching algorithm applied to intelligent winter maintenance vehicle data. Transport. Res. Rec. 2005, 1935, 68–76. [Google Scholar] [CrossRef]
- Honey, S.K.; Zavoli, W.B.; Milnes, K.A.; Phillips, A.C.; White, M.S.; Loughmiller, G.E. Vehicle Navigational System and Method. U.S. Patent No. 4,796,191, 3 January 1989. [Google Scholar]
- Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. Map-matching in complex urban road networks. Rev. Bras. Cartogr. 2004, 55, 1–18. [Google Scholar]
- Zhao, L.; Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. An extended Kalman filter algorithm for integrating GPS and low-cost dead reckoning system data for vehicle performance and emissions monitoring. J. Navig. 2003, 56, 257–275. [Google Scholar]
- Kim, W.; Jee, G.; Lee, J. Efficient use of digital road map in various positioning for ITS. In Proceedings of the IEEE Symposium on Position Location and Navigation, San Diego, CA, USA, 13–16 March 2000.
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Process. 2002, 50, 425–435. [Google Scholar]
- Quddus, M.A.; Noland, R.B.; Ochieng, W.Y. A high accuracy fuzzy logic-based map-matching algorithm for road transport. J. Intell. Transport. Syst. 2006, 10, 103–115. [Google Scholar]
- Velaga, N.R.; Quddus, M.A.; Bristow, A.L. Developing an enhanced weight-based topological map-matching algorithm for intelligent transport systems. Transport. Res. C Emerg. 2009, 17, 672–683. [Google Scholar]
- Li, L.; Quddus, M.; Zhao, L. High accuracy tightly-coupled integrity monitoring algorithm for map-matching. Transport. Res. C Emerg. 2013, 36, 13–26. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Integrity of map-matching algorithms. Transport. Res. C Emerg. 2006, 14, 283–302. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiménez, F.; Monzón, S.; Naranjo, J.E. Definition of an Enhanced Map-Matching Algorithm for Urban Environments with Poor GNSS Signal Quality. Sensors 2016, 16, 193. https://doi.org/10.3390/s16020193
Jiménez F, Monzón S, Naranjo JE. Definition of an Enhanced Map-Matching Algorithm for Urban Environments with Poor GNSS Signal Quality. Sensors. 2016; 16(2):193. https://doi.org/10.3390/s16020193
Chicago/Turabian StyleJiménez, Felipe, Sergio Monzón, and Jose Eugenio Naranjo. 2016. "Definition of an Enhanced Map-Matching Algorithm for Urban Environments with Poor GNSS Signal Quality" Sensors 16, no. 2: 193. https://doi.org/10.3390/s16020193
APA StyleJiménez, F., Monzón, S., & Naranjo, J. E. (2016). Definition of an Enhanced Map-Matching Algorithm for Urban Environments with Poor GNSS Signal Quality. Sensors, 16(2), 193. https://doi.org/10.3390/s16020193