1. Introduction
Insects have evolved two general strategies to cope with habitat changes: diapause or migration. Long-distance migration, a seasonal to and from movement of insect populations between different regions where conditions are alternately favorable or unfavorable, is a widespread phenomenon among animals [
1]. Billions of insects migrate annually, which makes it an important reason for crop pests’ sudden outbreaks and plant disease prevalence [
2]. Therefore, better understanding of insect migration could help us develop more effective management strategies against major crop pests and other relevant diseases.
Insects, together with the fact that most species are nocturnal flying hundreds of meters above the ground, are too small for movement observing and individual tracking. Therefore, knowledge of insect migration lags behind that of other vertebrates, such as birds and bats. However, radar provides a good solution to this difficult problem, with the remote sensing capabilities of extracting information of free-fly migratory insects [
3,
4]. With these direct parameters, new discoveries of ecological and biological behaviors of migration insects were published constantly. For example, the phenomena of large-scale taking-off, high-density concentrating, and downwind orientation of insect swarms were directly observed by entomological radars [
5,
6,
7,
8].
Although important progresses have been made by entomological radar studies, the accurate acquisition of 3-D flight trajectory of individual insect remains unsolved by the limitation of working modes and system functions of traditional entomological radars. Nowadays, entomological radars can be mainly divided into two types: scanning radar and vertical-looking radar (VLR). Scanning radar can acquire migration parameters for the overflying population, such as density, speed, and flight direction. However, it is difficult for scanning radar to acquire information of individual insect [
9]. VLR allows information related to the size, shape, wingbeat frequency and body alignment of overflying insects to be acquired. However, the narrow beam it emits determines that the spatial scale it monitors is quite small. Besides, the range information is measured with the time delay of the pulse signal and angle information is deduced from the echo intensity modulation. Therefore, VLR can just acquire the flight trajectory of individual insect at a very small spatial scale with low accuracy [
10].
Acquisition of the flight trajectory of migratory insects can improve our knowledge on the migration behavior of insects, and help us model accurately the migration pathway of crop pests. For example, with high accuracy acquisition of the insects’ flight trajectories, it is possible to figure out how different insects adjust their flight to orient towards the same direction [
11]. As another example, entomologists found that concentrating behavior related with rainfall could cause large numbers of insects to land within a short time and pest outbreaks would happen [
12]. Combining trajectory information with rainfall information, effective early warning of pest outbreaks could possibly be realized. Therefore, studies on new methods of obtaining 3-D flight trajectory of migratory insects are imperative and important.
The 3-D location of a target can be determined by its range, elevation angle and azimuth angle in the polar coordinate. The direction of arrival (DOA) of an incoming signal can be determined with a multi-baselines interferometer. Although the elevation and azimuth angles of a target can be determined with high accuracy, the DOA method has a disadvantage of strict requirement of baseline settings to eliminate influence of phase ambiguity [
13]. The time summation of arrival (TSOA) method can also be used to determine a target’s 3-D location. However, this method needs to solve non-linear equations with iteration calculation. The computationally time-consuming process means it cannot be used to acquire trajectory information of insects in real-time [
14]. Till now, no research on acquiring the 3-D flight trajectory of migratory insects in entomological radar applications has been carried out.
To address the above problem, a novel method to acquire the 3-D flight trajectory of individual insect is proposed. First, based on the high range resolution synthesizing and the Doppler coherent processing, insects can be detected effectively, and the range resolution and velocity resolution are combined together to discriminate insects. Then, high accuracy range measurement with the carrier phase is proposed. The range measurement accuracy can reach millimeter level and benefits the acquisition of trajectory information significantly. Finally, based on the multi-baselines interferometry theory, the azimuth and elevation angles can be obtained with high accuracy. We utilize S-band (wavelength 9.09 cm) radar, which adopts high resolution technique and employs multi-baselines interferometry theory, to carry out experiments of several typical migratory insects in an anechoic chamber. Both the simulated and experimental datasets validate the feasibility of the proposed method, which lays theoretic foundation for monitoring the 3-D flight trajectories of aerial free-fly insects.
The remainder of the paper is organized as follows:
Section 2 introduces the proposed method, which includes five steps, i.e., signal model, high range resolution synthesizing, Doppler coherent processing, high accuracy range measurement with carrier phase, and angle measurement with multi-baselines interferometry.
Section 3 demonstrates the performance of the proposed method with the simulated and experimental datasets. Our conclusions are drawn in
Section 4.
2. Method
2.1. Signal Model
Water is a highly effective scatter of radio waves. An insect’s body contains a mass of water, which makes it an identifiable target of radar. However, in contrast to the range resolution (decimeter or meter level) of current radars systems, insects are too small (millimeter or centimeter level). Therefore, an insect can be regarded as a point target.
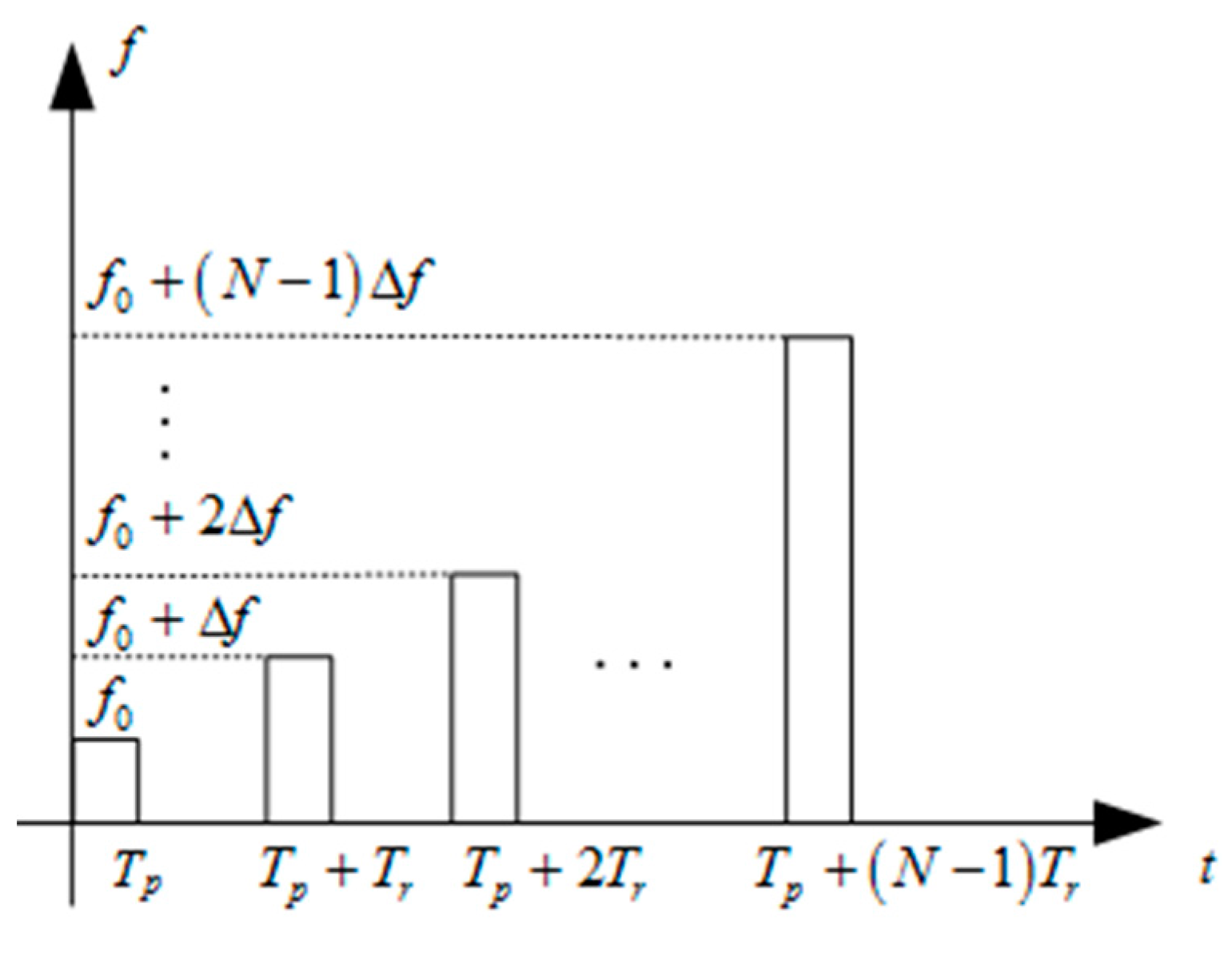
The stepped-frequency technique is adopted to realize high range resolution [
15]. A frame of stepped-frequency signal includes a group of subpulses. The difference of the carrier frequencies between two neighboring subpulses is the same, and it is called the frequency step.
Figure 1 shows the scheme of the stepped-frequency signal. The transmitted signal can be modeled by
where
is the subpulse duration,
is the subpulse repetition interval,
is the frequency step size,
N is the number of subpulses in a frame of stepped-frequency signal and
is the carrier frequency of the first subpulse.
is a rectangular window function which limits the time range
. Every subpulse is a linear frequency-modulated signal.
In ideal conditions, as a point target, echo amplitude of individual insect can be considered as one. Therefore, for a moving insect with initial distance
and radial velocity
v, the time delay between its echo signal and transmitted signal is
, where
c is the speed of light. The echo signal can be described by
Considering the coherent referenced signal as
Mixing the echo signal with the referenced signal, we have
2.2. High Range Resolution Synthesizing
In order to acquire the flight trajectory of individual insect, both ability to acquire range information with high accuracy and ability to distinguish individual insect from insects group are necessary. Traditional entomological radars emit pulse signal and the typical values of the pulse durations are 0.1, 0.07 or even 0.05 μs (15, 10 and 7.5 m range resolution, respectively). The low range resolution makes it easy to have multiple insects in a resolution cell. Therefore, we adopt high resolution synthesizing technique [
16,
17].
The total time
of each frame of the stepped-frequency signal is in the order of millisecond and the radial flight velocity of an insect is no more than 10 m/s, then the flight distance of individual insect in
is very short, which means the time delay
can be considered as a constant
. The first term of Equation (4) limits the time range of the echo signal, the second term
is a constant, while the third term
can be regarded as a frequency-domain signal with linear change frequency at
. Sample the mixing result at time
and get
Take the IDFT (inverse discrete Fourier transform) operation of Equation (5),
where
, and
is the range resolution.
is the high resolution synthesizing result and a frame of wideband signal in time domain. Its amplitude is
is a discrete sinc function. When n equals , gets its max value. The range resolution commonly used in the high resolution radar systems is in decimeter level. Considering that n is an integer and might not be, range measurement error cannot be avoided if the target range R is just determined by n, which is the location of the max amplitude of the high resolution synthesizing result. The measurement error is approximately several centimeters or decimeters.
Adoption of the high resolution synthesizing technique benefits the distinction of individual insect from insects group. Besides, high resolution synthesizing can improve signal-to-noise ratio (SNR), since the synthesized result is a sinc function and the signal power is concentrated. The detection performance of weak targets can be improved greatly with the high resolution technique.
2.3. Doppler Coherent Processing
Current research has proven RCS (Radar Cross Section) of individual insect is very small and RCS of tiny insects can even lower to −80 dBsm [
18,
19]. Therefore, random noise affects the effective detection of individual insect. The phase variation of the random noise is stochastic, while that of the high resolution synthesizing result is coherent. Doppler processing is a coherent integration method, so it can be used to further improve SNR and benefits the detection of insects flying at the high altitude [
20].
To acquire 3-D flight trajectory of individual insect on a large spatial scale, a wide beam is essential. However, it causes a large resolution cell and makes it easy for multiple insects to fly in the same resolution cell. Doppler processing can acquire velocity information based on the shift of Doppler frequency and provide another dimension of velocity resolution. Therefore, multiples insects flying in the same resolution cell can be discriminated in a new 2-D joint domain of range domain and velocity domain.
The Doppler processing method takes DFT (discrete Fourier transform) operation to multi-frames of high resolution synthesizing results. Assume that multi-frames of high resolution synthesizing results constitute a group and each group includes
M frames. If too many frames are used to take Doppler processing, the flying distance of an insect within the time of
M frames may cross multiple range resolution cells and then velocity compensation is essential to make effective Doppler analysis. To simplify this problem and avoid velocity compensation,
M should not be too large. Assuming the insect target moves uniformly relative to the radar in each group, the time delay between the echo and transmitted signals is
where
means the initial distance between the insect target and the radar. The high resolution synthesizing result in Equation (6) can be further described as
where
is the wavelength of the radar signal.
n is a variable, so the complex term
should be compensated before taking Doppler processing. Compensating the complex term including
n of Equation (9), we can get
When taking Doppler processing, regard
n as a constant and
m a variable, so the phase of the first term shows linear variation with
m. The second term is a
sinc function. When
n equals
, the second term gets its max value 1, but
m is a variable when take Doppler processing, so its max value will change with
m. In order to avoid velocity compensation, the max value of the second term should approach 1 when
m varies. Under the condition that the amplitude fluctuation of the max value is no more than 5%, we can get the condition that
M should satisfy is
Now the max value of the second term can be regarded as a constant, so when taking Doppler processing, we can just consider the first term of Equation (10). Get the first complex term,
Take Doppler processing to
,
where
,
is the velocity resolution. In order to extract carrier phase of the target, the complex phase term
, including
k, should be compensated and we can get
where
is the mean value of the distance between the insect target and radar within the time of
M frames.
is the Doppler coherent processing result. Other than range resolution
,
also has velocity resolution
. Therefore, the Doppler processing result can provide another dimension of velocity resolution, which benefits the discrimination of insects in a new 2-D joint domain of range domain and velocity domain. Amplitude of
is
is a discrete 2-D
sinc function. When
n equals
and
k equals
,
reaches its maximum value. The complex information of the maximum value is
We can see that taking Doppler coherent processing to the high resolution synthesizing results is equivalent to making secondary compression. Moreover, the Doppler processing result has velocity resolution besides range resolution. In conclusion, with Doppler coherent processing, SNR can be further improved to benefit the detection of insects and velocity resolution is introduced to benefit discrimination of insects.
2.4. High Accuracy Range Measurement with Carrier Phase
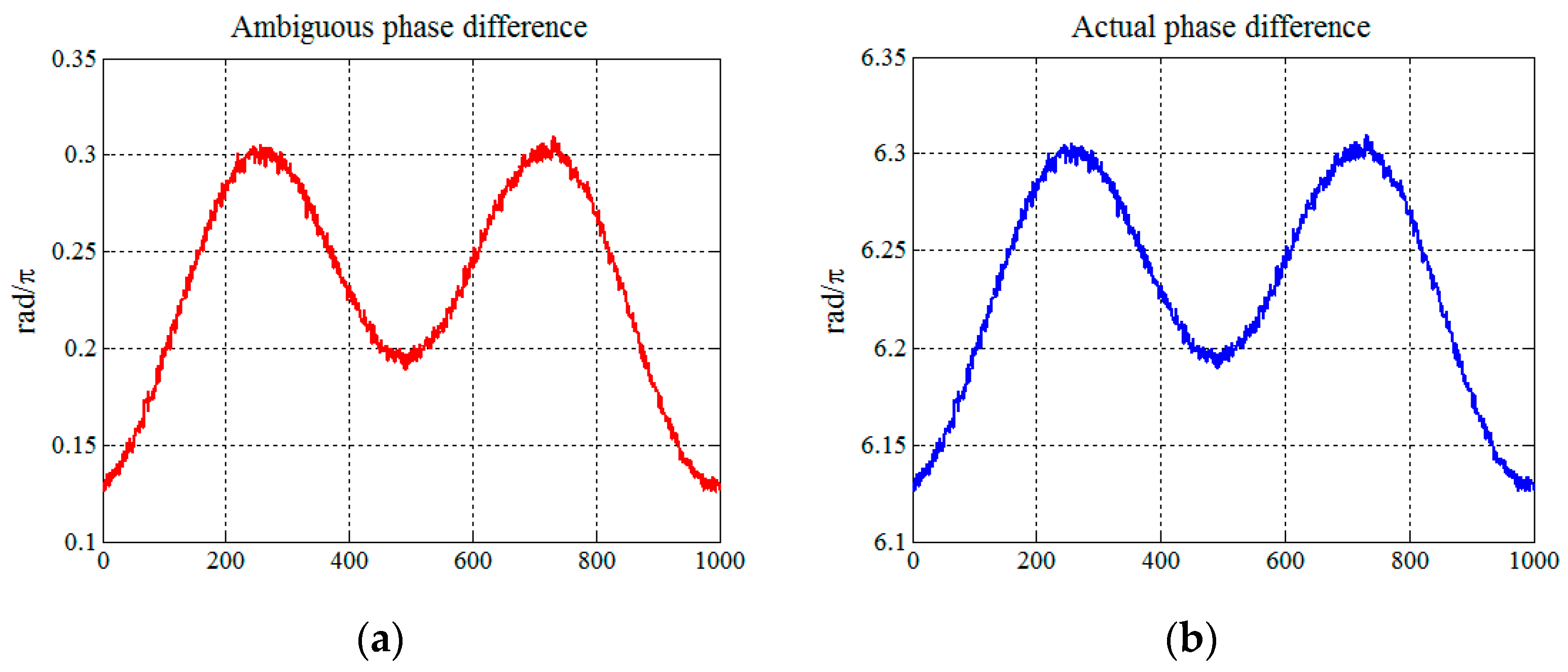
From Equation (15), the Doppler processing result is a discrete 2-D sinc function. According to the location of the maximum amplitude, the target’s range R and radial velocity v can be determined. Traditional high resolution radars utilize the time delay of the echo signal, i.e., according to the location of the maximum amplitude of the Doppler processing results, to take range measurement. Common accuracy of range measurement with the time delay is in the order of centimeter or decimeter. The measurement accuracy is not high enough. To acquire 3-D flight trajectory of individual insect with high accuracy, high accuracy range measurement is essential.
Considering the phase term shown in Equation (16), the carrier phase is very sensitive to the radial range variation of the target and it is potential for high accuracy range measurement. The half-wavelength motion in range could cause
phase change. If the range change is larger than
between two adjacent groups to take Doppler processing, the phase difference could be ambiguous. Thus, the frame number of signals to take Doppler processing should be limited and high pulse repetition frequency is essential. After satisfying the unambiguous condition, the accurate range can be deduced with the carrier phase difference. Moreover, the Doppler processing result has a high SNR, so the accuracy of range measurement based on carrier phase difference can be ensured [
21,
22]. The accurate range information is quite critical for the acquisition of 3-D trajectory information.
From Equation (16), in an ideal case, carrier phase of the target is
where
means the
group to take Doppler processing,
is the discrete sampling interval and equals
. The carrier phase difference of two adjacent groups is
It can be noted that the phase difference information includes range difference information. Under the condition that
is known,
can be acquired with high accuracy from the phase difference.
Utilizing Equation (19), range information at any moment can be acquired as
where
is the initial range.
The accuracy of range measurement is determined by the extraction accuracy of carrier phase difference. Actually, insects’ RCS are related with their aspect—the direction they are facing relative to the radar beam. Therefore, insects’ flight can cause variation of RCS because of the variation of their aspect angles [
15]. Otherwise, cloud, atmosphere and other meteorological conditions can reflect radar clutter. All above factors could affect the extraction accuracy of phase information. Problems such as phase ambiguity and phase jump would occur, so suitable filtering method should be adopted to reduce influence of stochastic phase noise.
2.5. Angle Measurement with Multi-Baselines Interferometry
To acquire 3-D coordinate of individual insect, angle measurements of the azimuth and elevation angles are also needed. Based on multi-baselines interferometry theory, range differences between the target and different antennas can be used to take angle measurement. Contrast to the DOA method, which is based on the phase interferometry, the proposed method has an advantage of no phase ambiguity and angle measurement accuracy can be guaranteed with high accuracy range information [
13,
23].
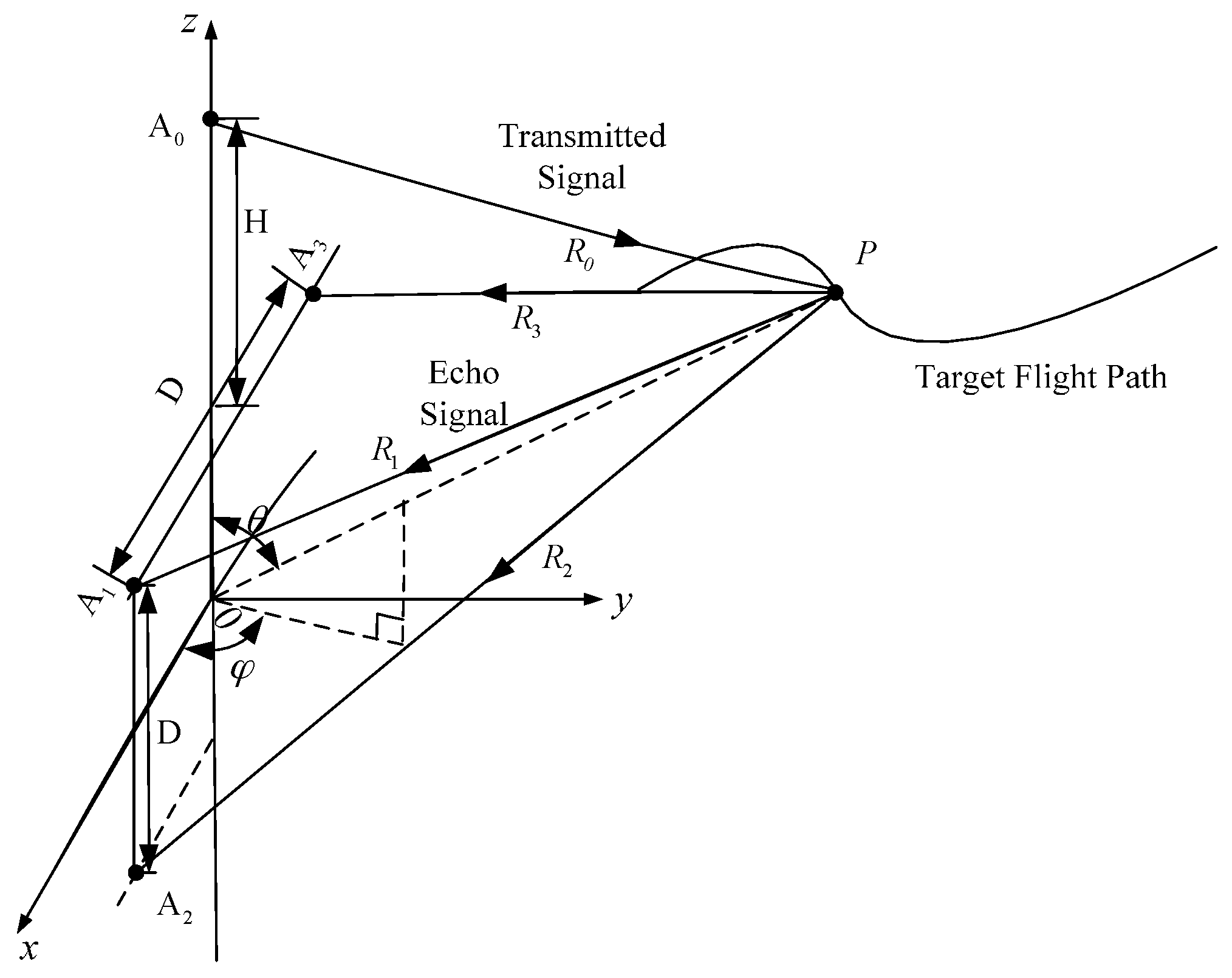
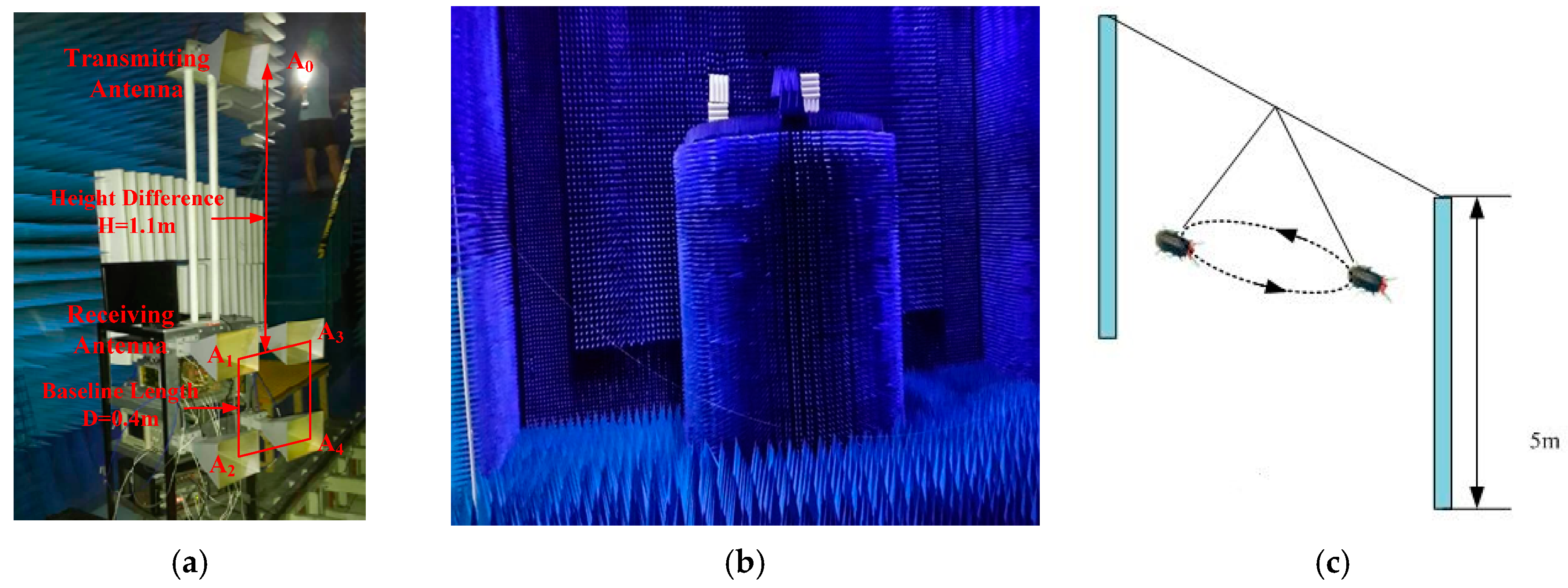
Diagram of angle measurement with multi-baselines interferometry is shown in
Figure 2. The radar system includes three receiving antennas and one transmitting antenna. The transmitting antenna
is on the
z-axis and the three receiving antennas
,
and
can form two independent baselines. We adopt antennas
,
and
,
to form baselines
and
, respectively. Ranges from the target to the four antennas are
,
,
and
, respectively. Considering that insect migration occurs at heights of up to (and sometimes over) 2 km, the ranges are much larger than the length of the baselines (decimeter level). Therefore, angle measurement can be realized with the equations,
where
and
represents the range differences and
D is the baseline length. Baseline
is parallel to the
x-axis and
is parallel to the
z-axis.
H is the vertical height from transmitting antenna
to the baseline
.
is the elevation angle between the echo direction and
z-axis, and
is the azimuth angle between the projection direction of the echo signal in the
x-y plane and
x-axis.
Utilize Equations (21) and (22) to get
and
,
The central point of the baseline
is the coordinate origin
O. Once
and
are acquired accurately, range
R from the target
P to the origin
O can be obtained, so the target’s coordinate
in the polar coordinate system can be determined. The target’s coordinate
in the rectangular coordinate system can be obtained with
4. Conclusions
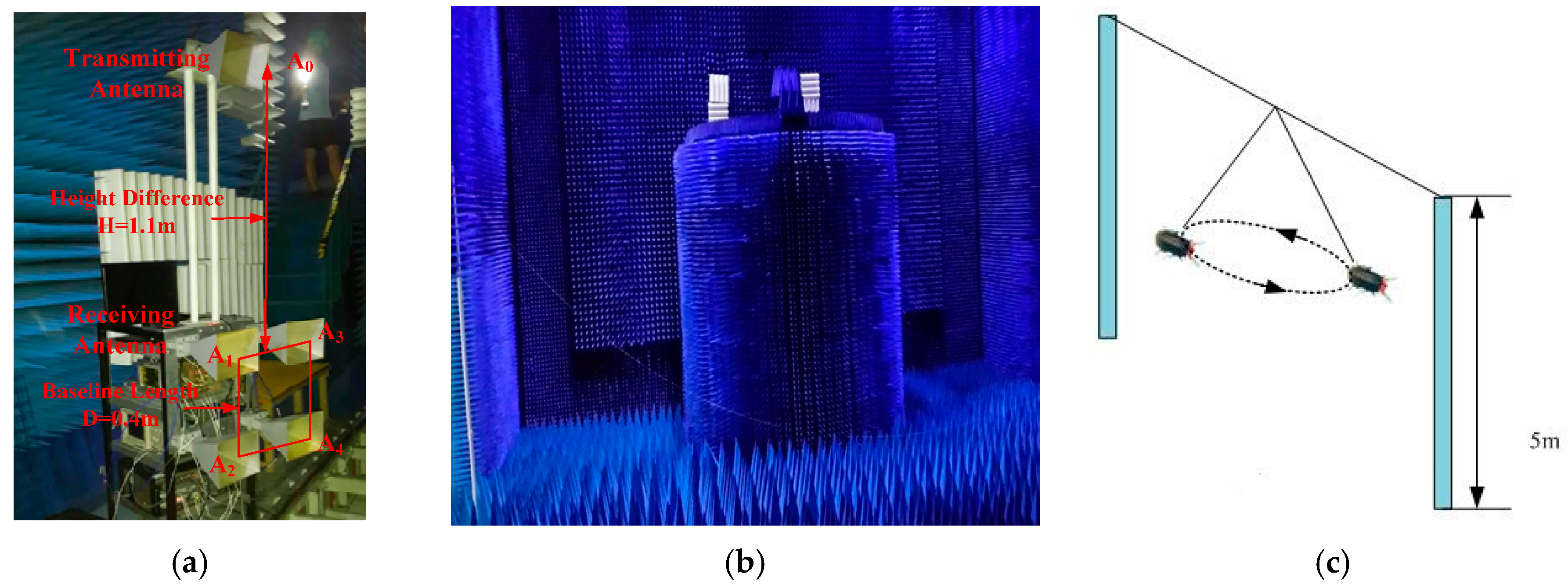
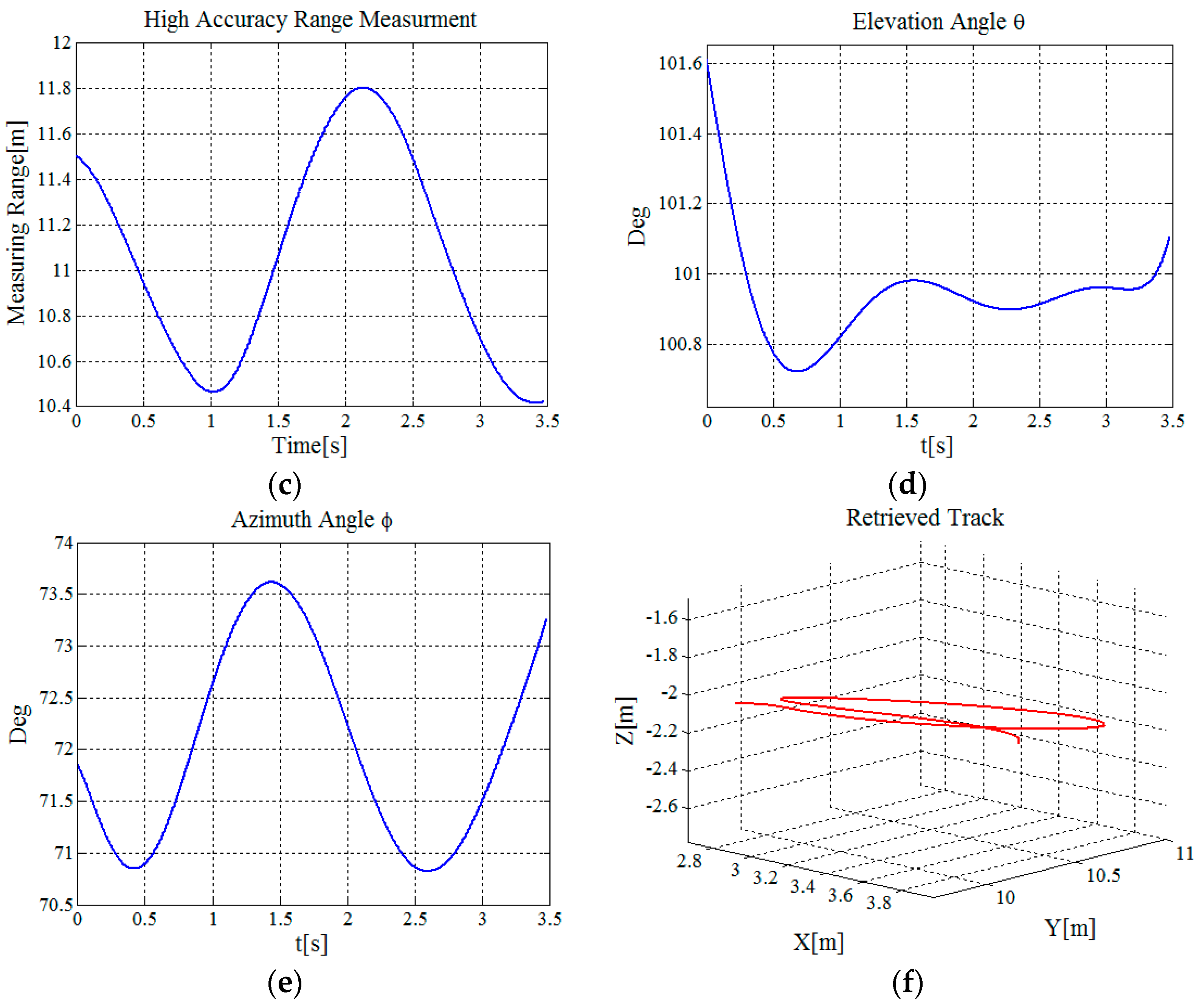
This paper proposes a novel method to acquire the 3-D flight trajectory of individual insect. The most important step is the high accuracy range measurement with carrier phase. Compared with traditional range measurement method with the time delay of the echo signal, the modification to take range measurement with the carrier phase benefits the acquisition of a target’s 3-D track significantly. The retrieval accuracy of a simulated target’s 3-D coordinates can be improved from meter level to centimeter level. To prove the effectiveness of the proposed method, comparison results with other localization methods such as the TSOA method and the DOA method prove that the proposed method is easy to be realized without problems such as time consuming and phase ambiguity. To prove the feasibility of the proposed method, utilizing a high resolution S-band radar system, experimental datasets acquired in the anechoic chamber are processed. Experimental results prove that the Doppler coherent processing can improve SNR significantly and benefit the effective detection of insects. In addition, the retrieved trajectory results show that insects’ flight behaviors and 3-D coordinates’ variation match well with actual situations.
This proposed method provides a novel way to monitor 3-D flight trajectory of the aerial free-fly insects. Forthcoming experimental analysis of 3-D flight trajectory of the aerial free-fly migrating insects will give a better verification of the feasibility of the proposed measurement method, benefiting the research of insect migration behaviors and the development of migratory entomology.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



