
Node Deployment with k-Connectivity in Sensor Networks for Crop Information Full Coverage Monitoring



Abstract
:1. Introduction
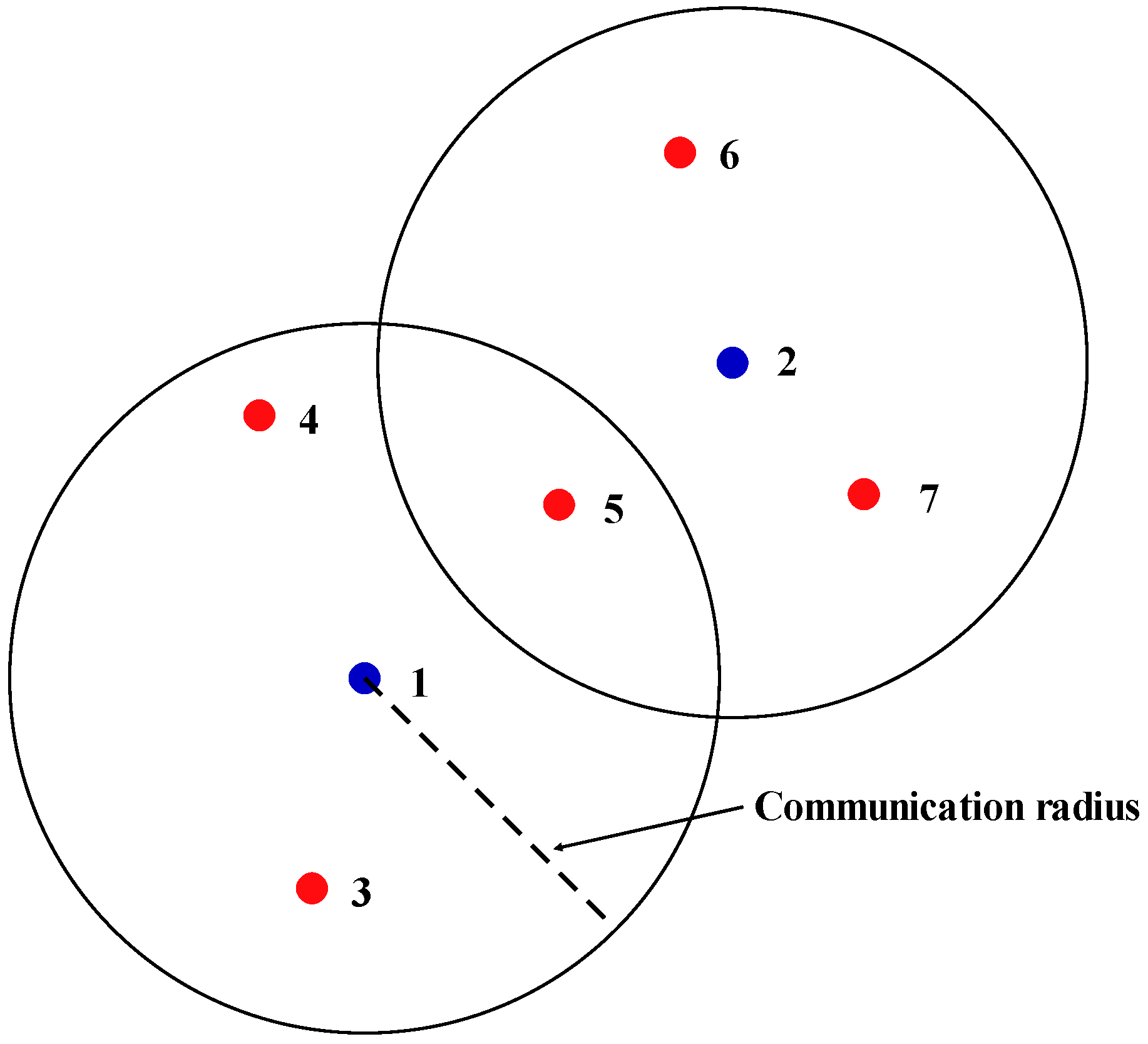
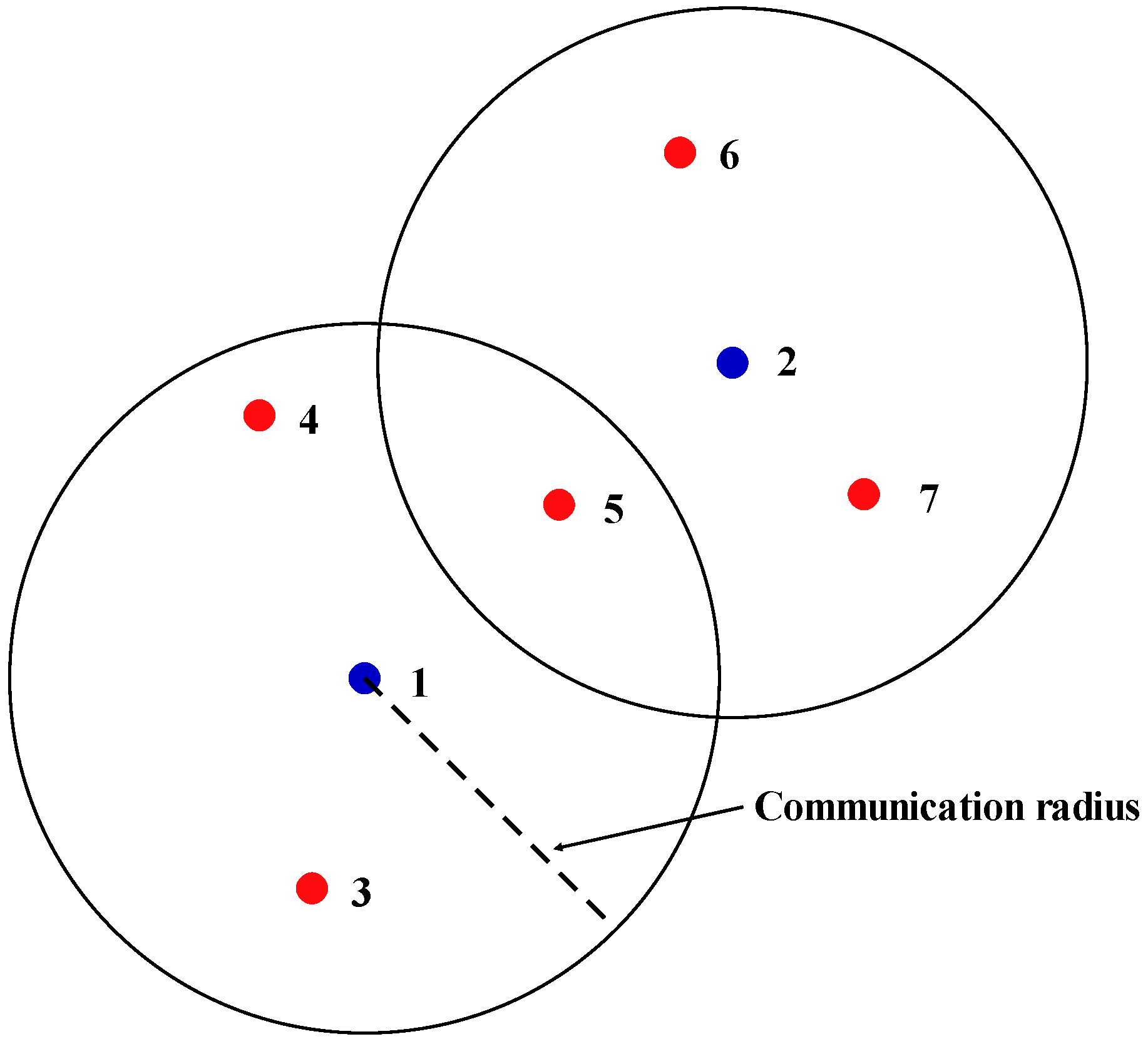
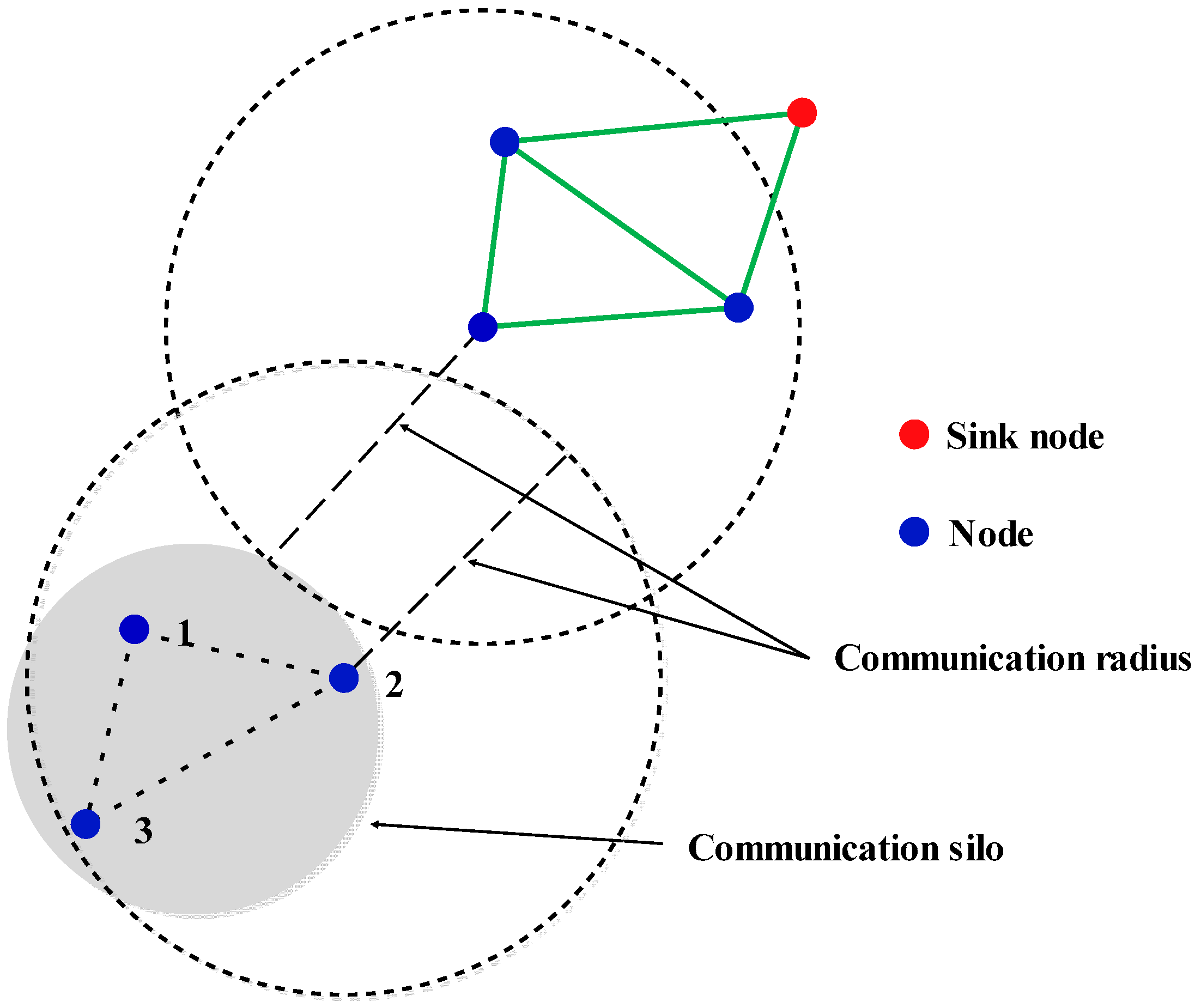
2. Farmland Full Coverage Monitoring and WSN k-Connectivity Deployment Method
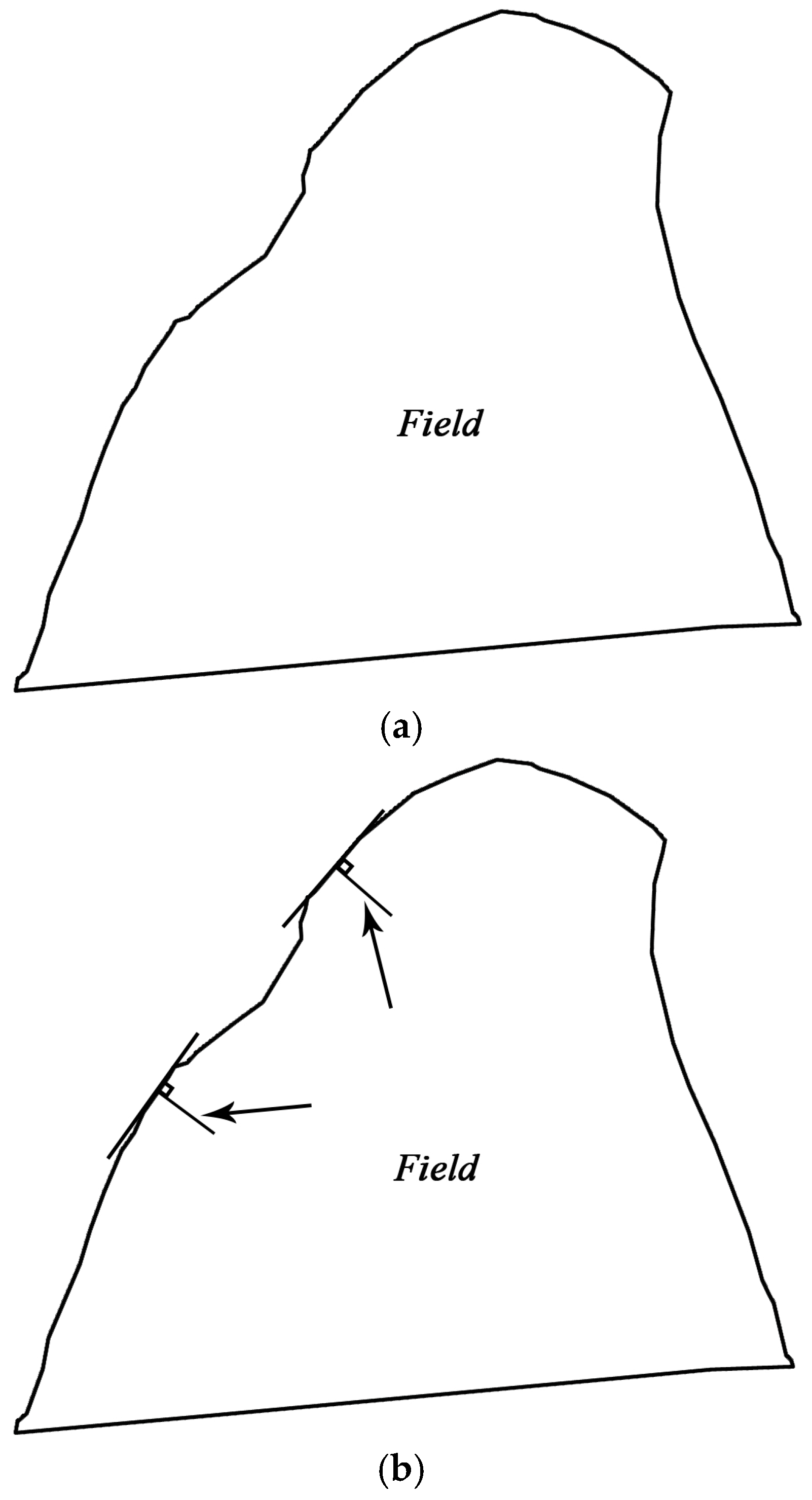
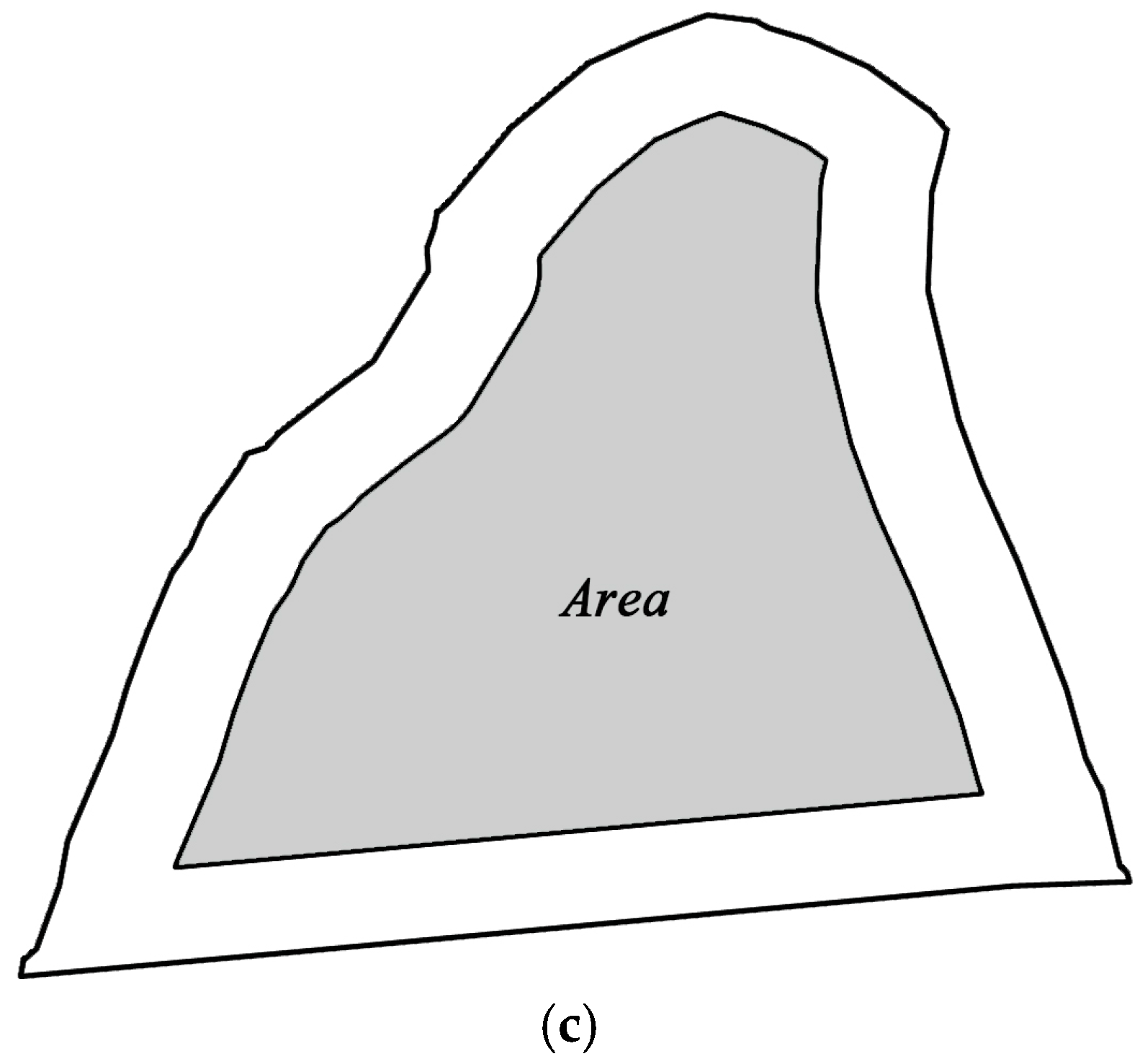
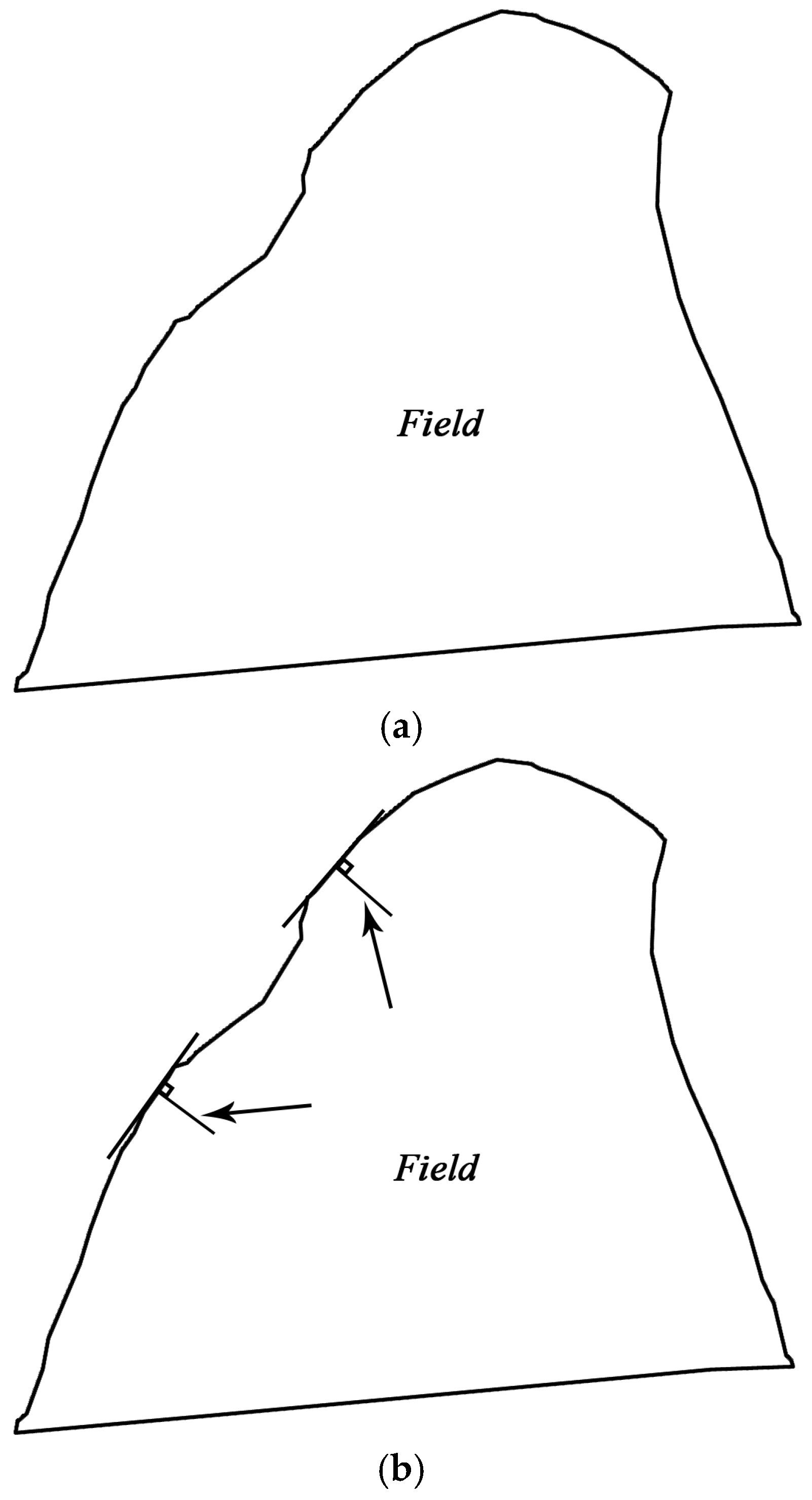
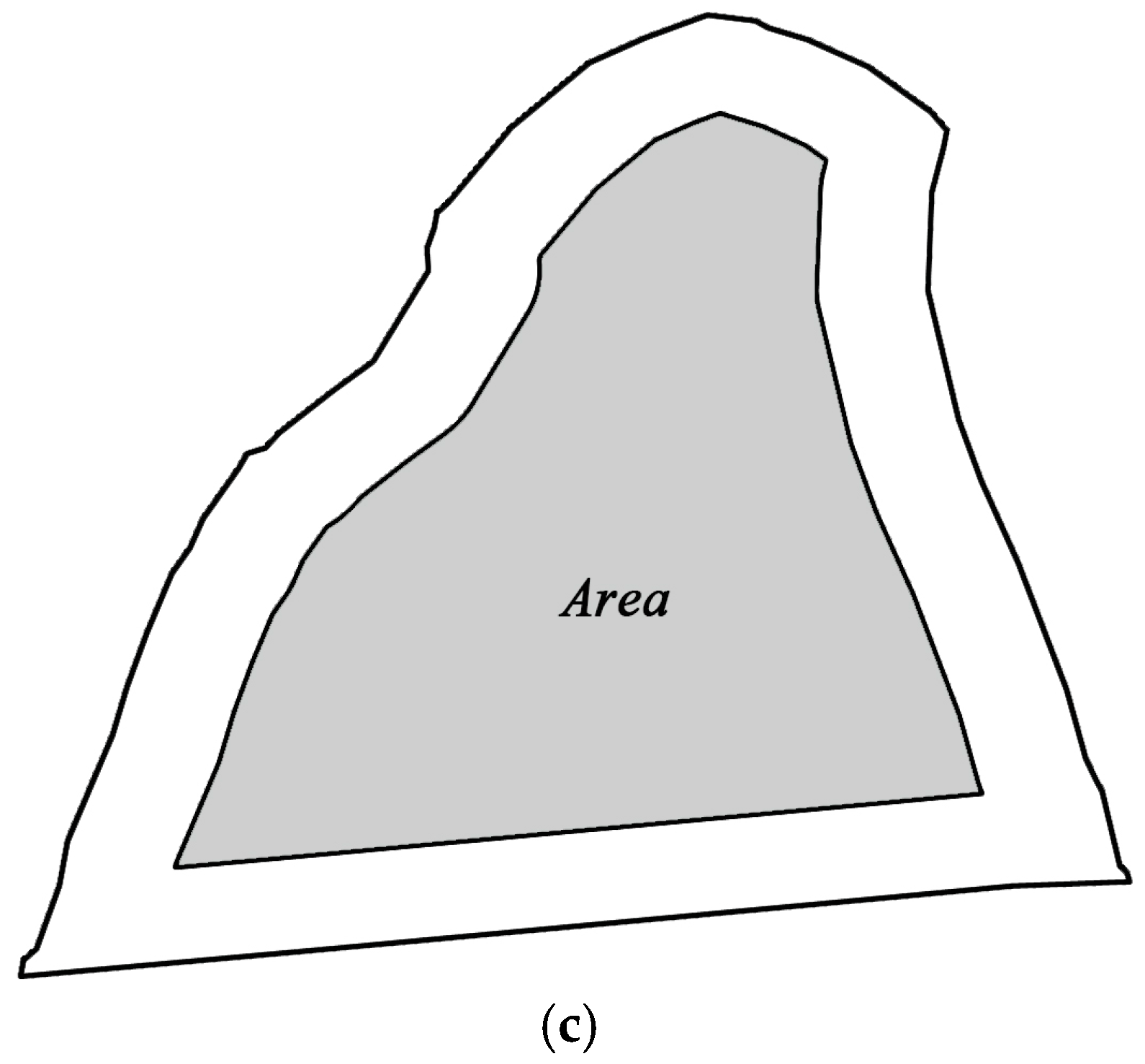
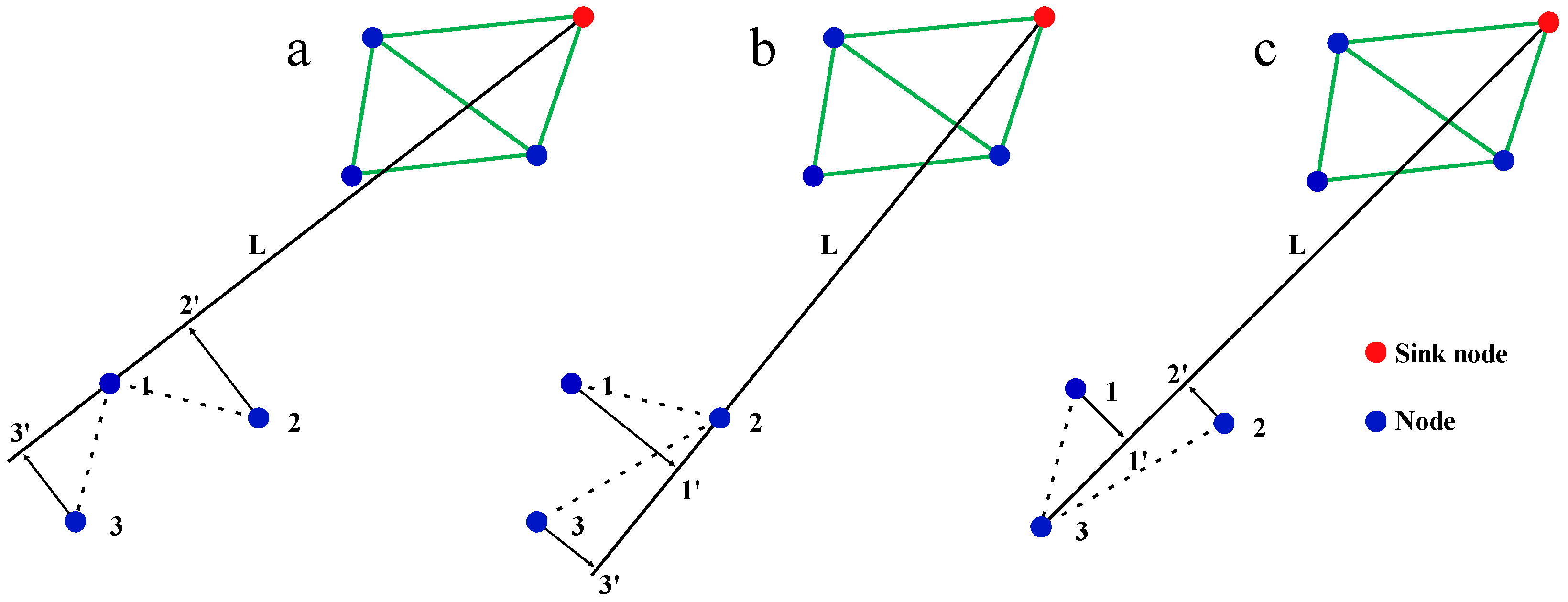
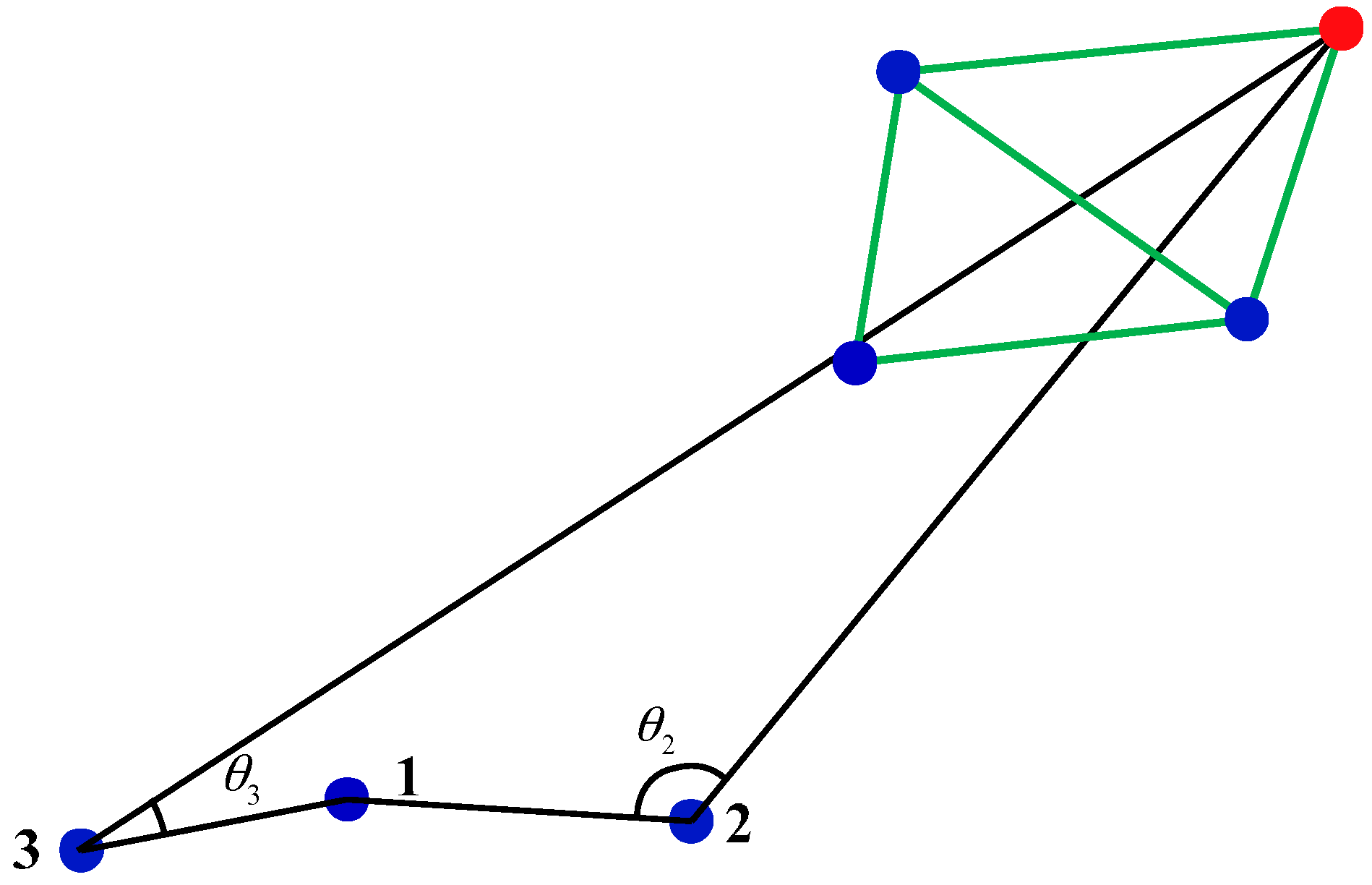
3. Avoiding the Farmland Edge Effect on the Nodes Deployed
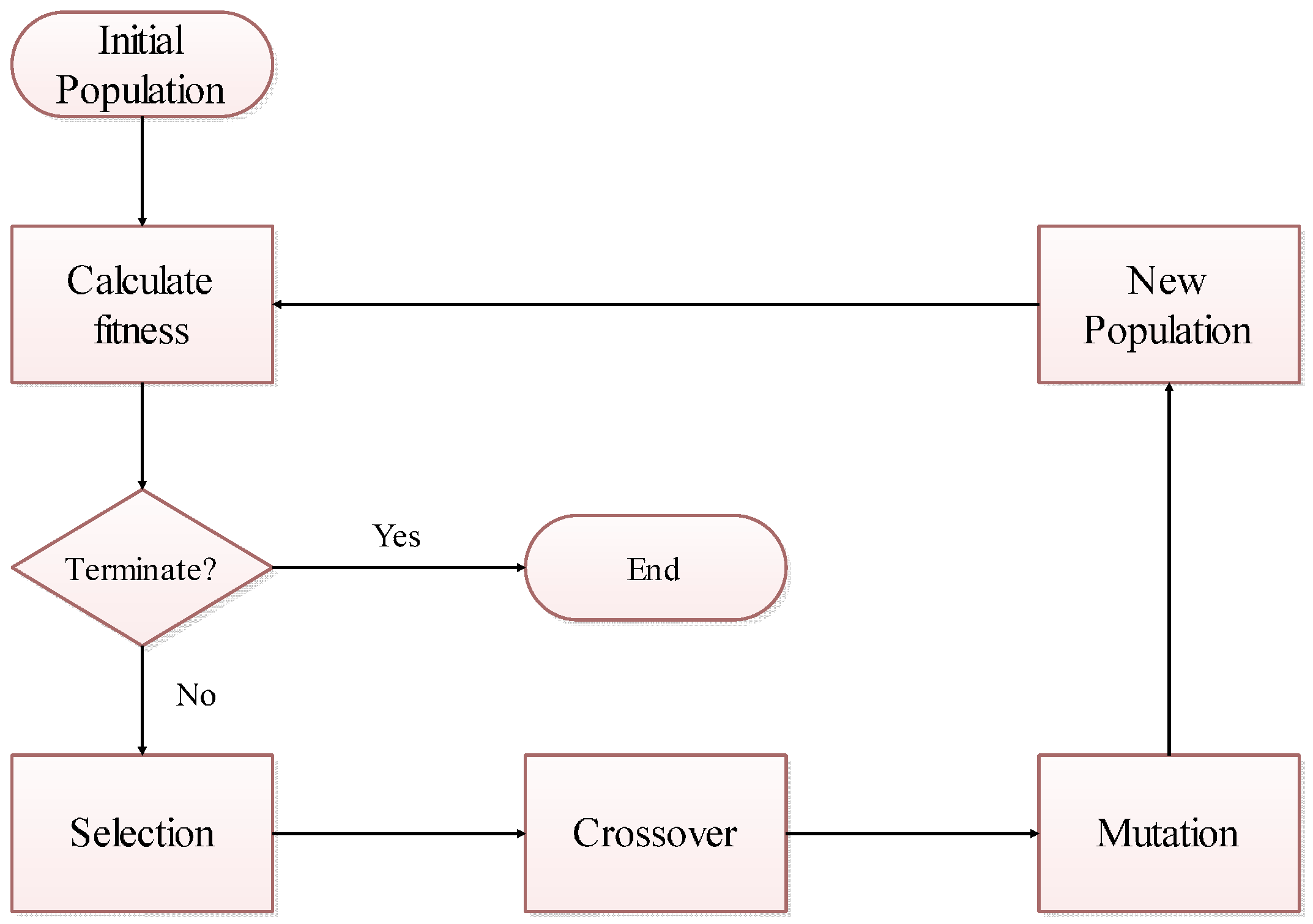
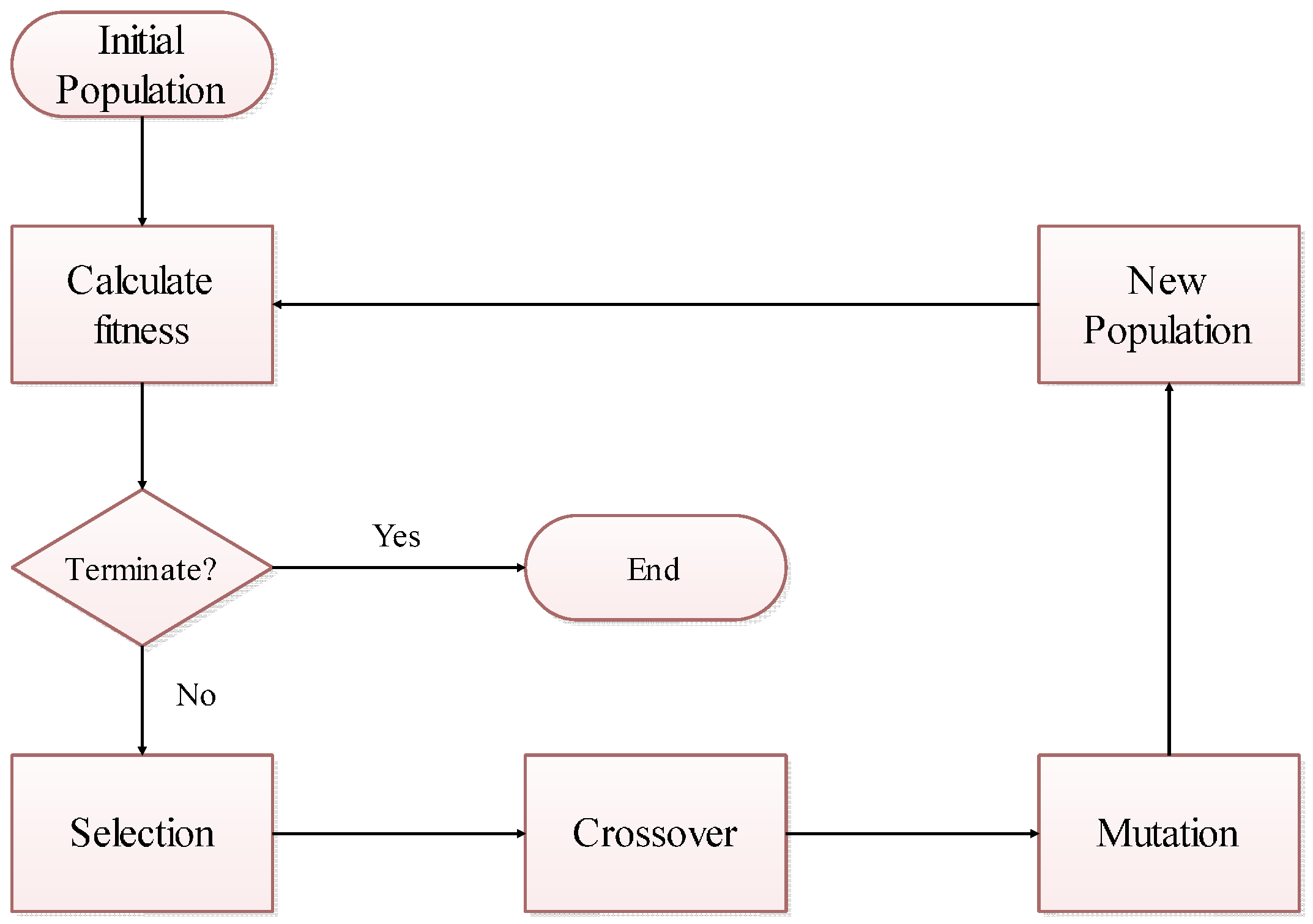
4. Genetic Algorithm for Farmland Full-Coverage Monitoring WSN Connectivity Deployment
4.1. Chromosome Encoding Representing Network Node Locations
4.2. Selection, Crossover and Mutation Operations
4.3. Construction of the Fitness Function for WSN Deployment
4.4. Multiple Population Evolution
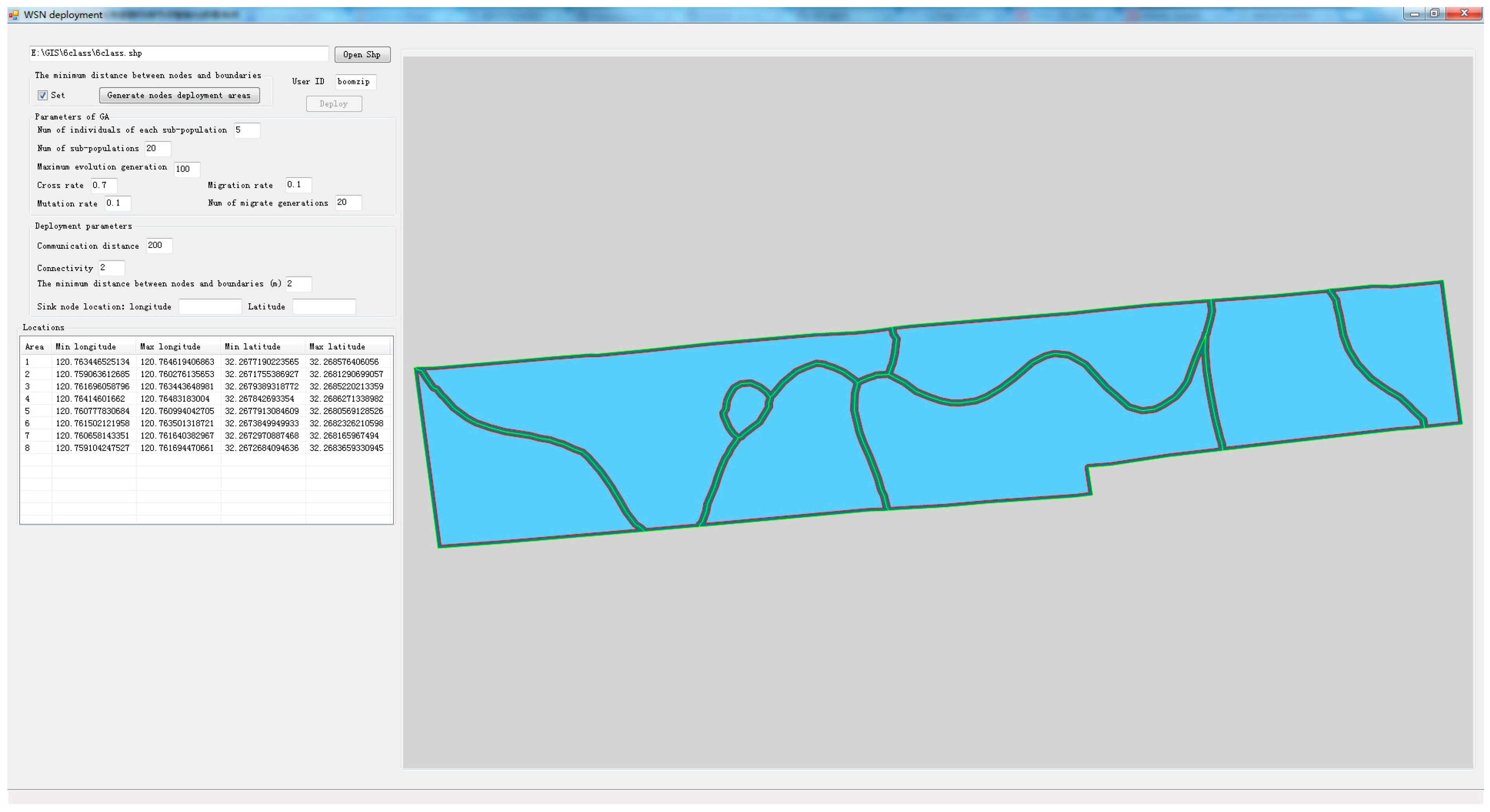
5. Development of Wireless Sensor Network Deployment Software
6. Deployment of WSN for Monitoring Crop Growth Information
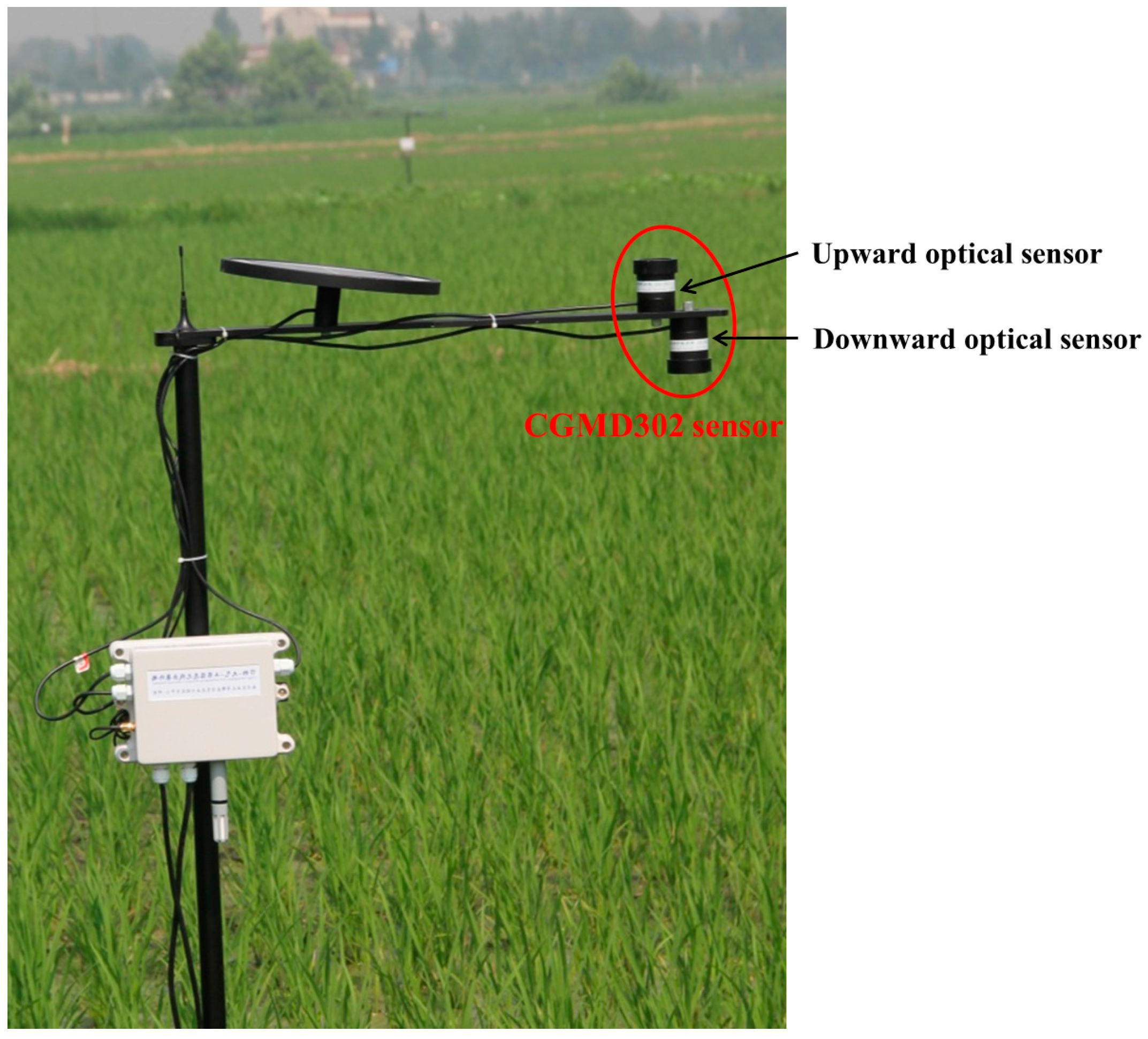
6.1. The CGMD302 Crop Growth Information Sensor
6.2. WSN Deployment on Irregular Farmland Divided by Differences of Spatial
6.3. WSN Deployment on Natural Farmland
6.4. Performance of the Deployment Method
6.4.1. The Deployment Performance for Different Value of k
6.4.2. Deployment Performance for Different Transmission Distances
6.4.3. Compared with Regular Grid Patterns Deployment Mothds
7. Conclusions
- (1)
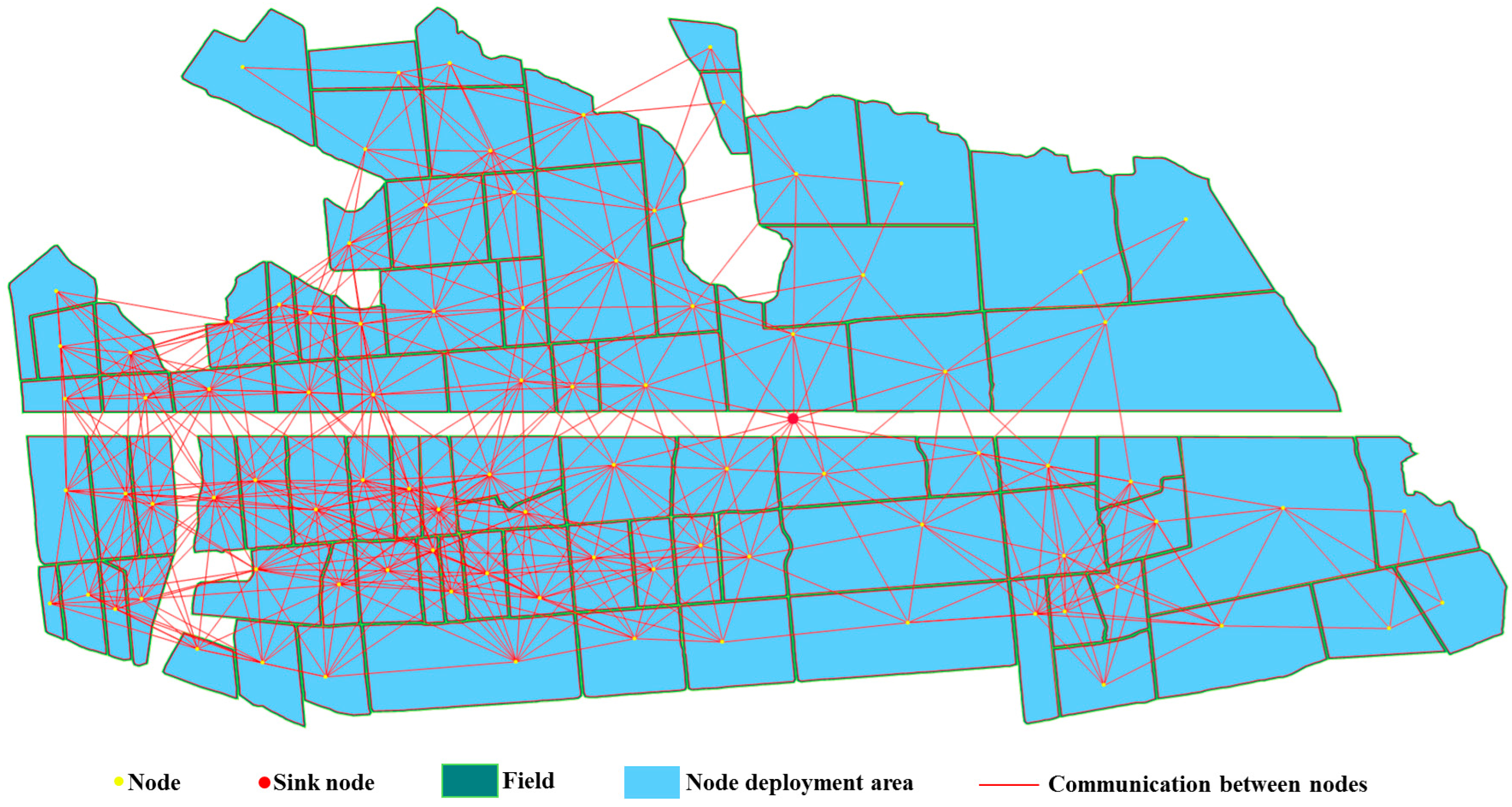
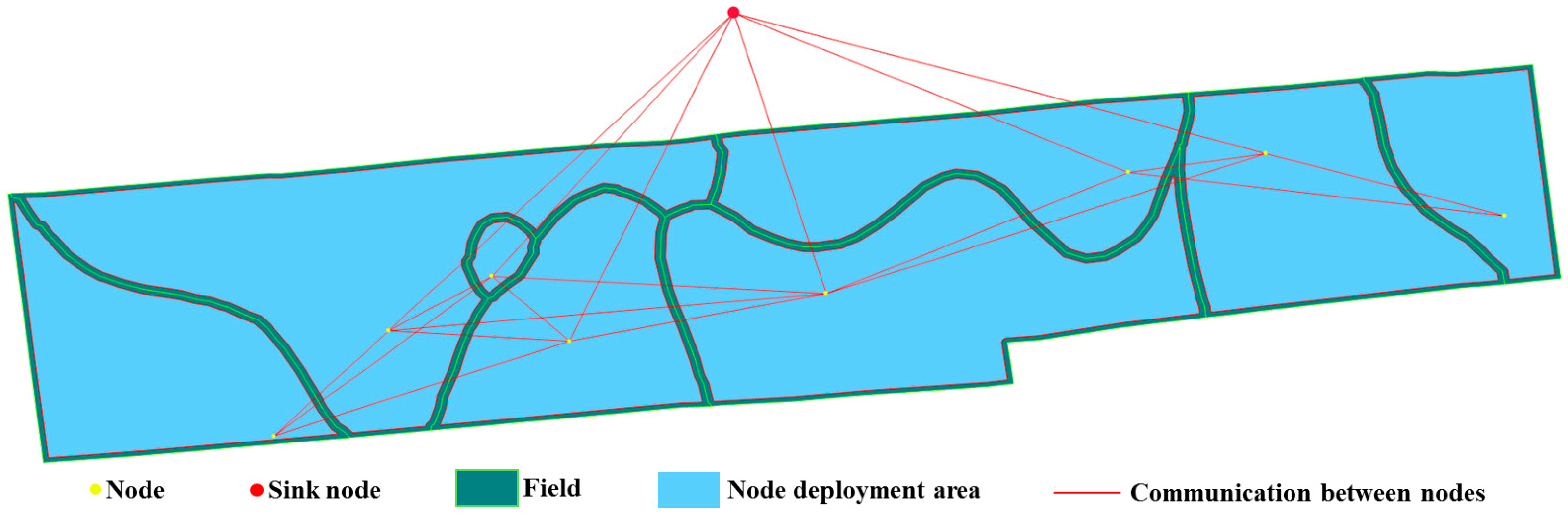
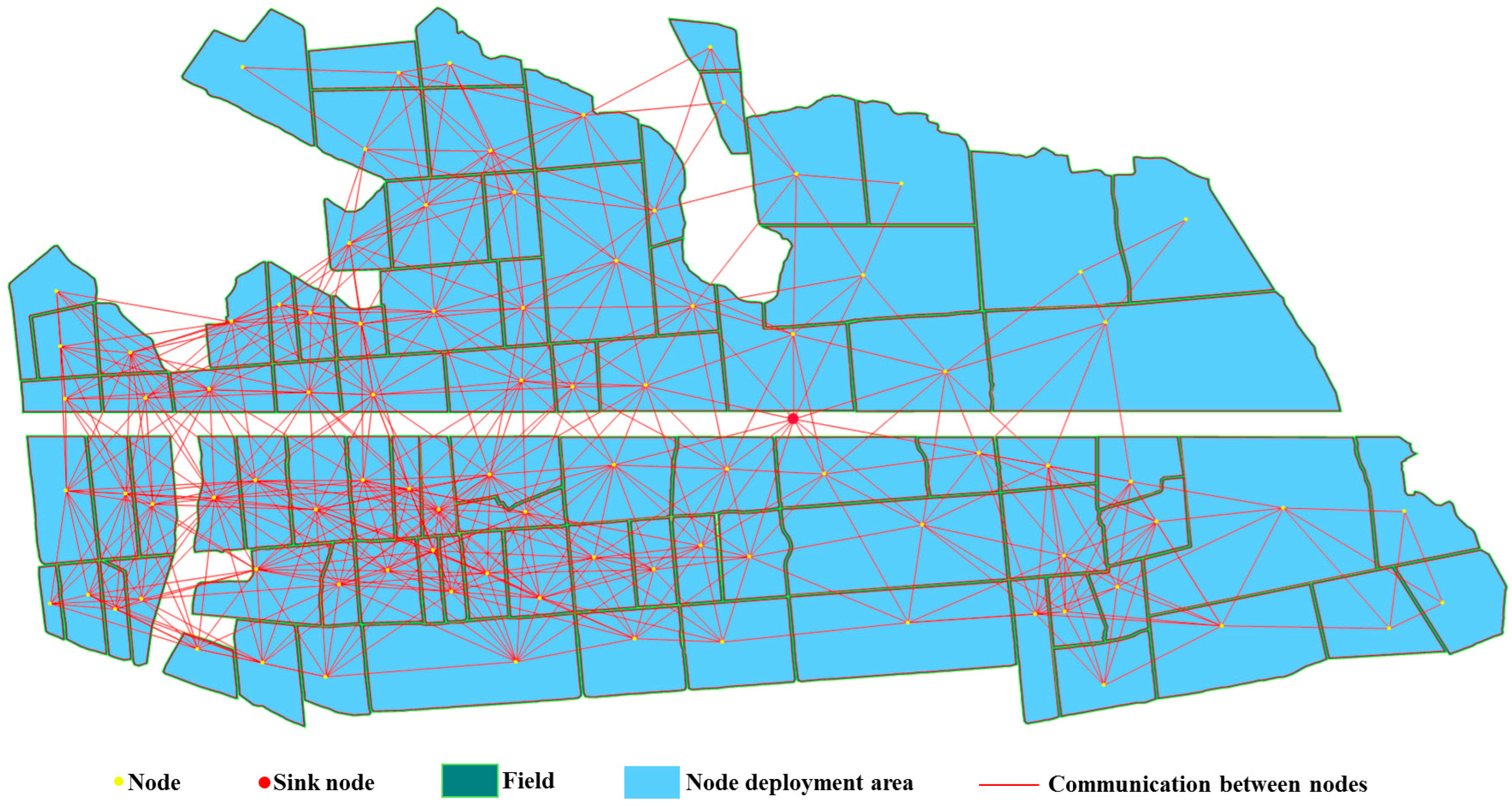
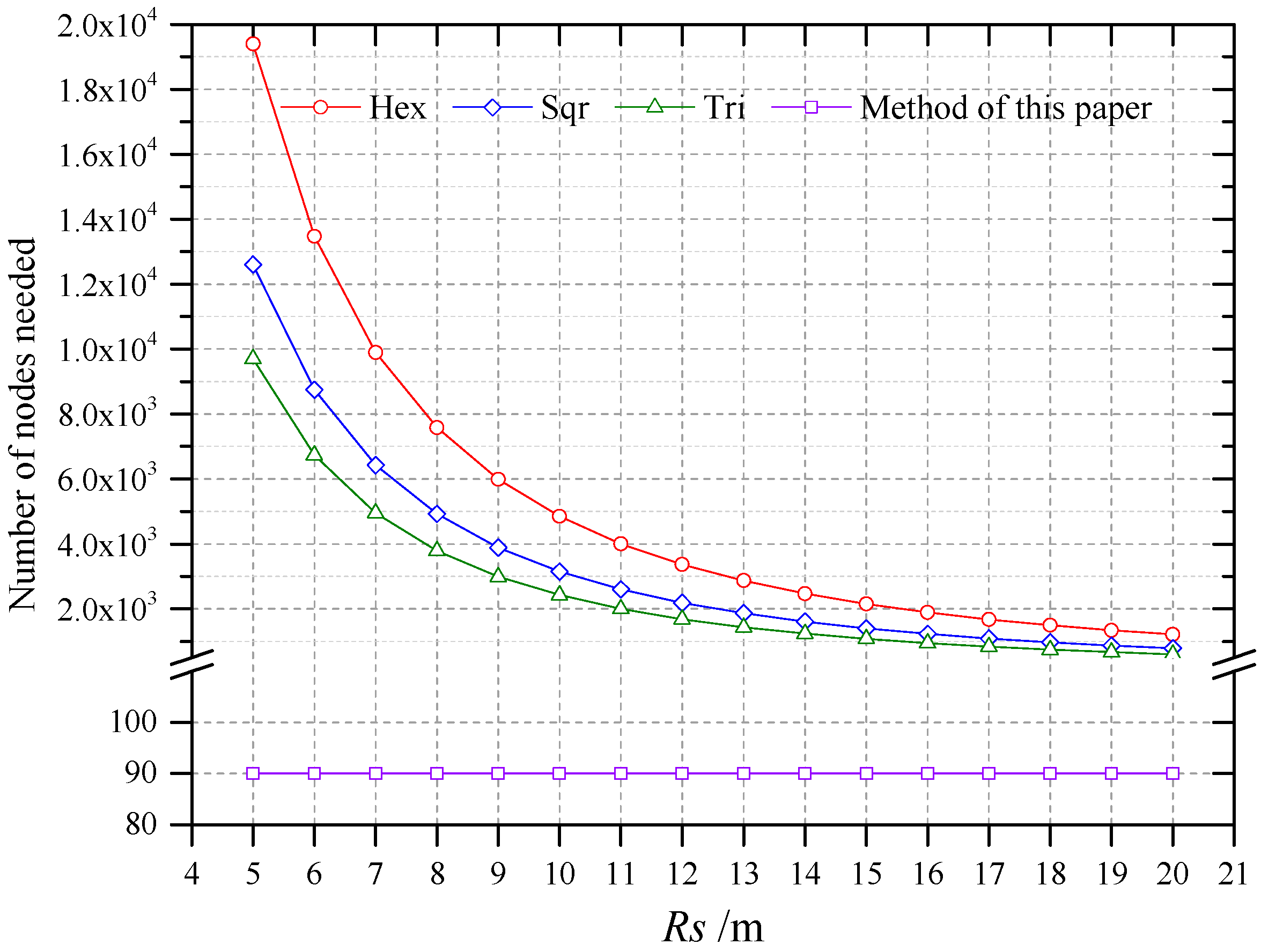
- Based on the characteristics of crop growth information monitoring, four criteria for WSN deployment were proposed. The method of WSN deployment with full coverage and k-connectivity for large-scale farmland was realized by using GA to meet the criteria. A large-scale WSN monitoring crop growth information was deployed in Rugao in Jiangsu Province, the transmission distance of node was 200 m. The study area was divided into sub-fields according to the spatial distribution of soil nutrients. Results showed that the network deployed using this method allowed for full-coverage monitoring of crop growth information, had no communications silos, and the minimum connectivity number of network nodes was two, the maximum was six, the average connectivity number of network nodes was 4.25, the network fully met the actual needs of agricultural production. A natural farmland with 63 ha, 90 plots, located in Nanjing in Jiangsu Province was selected to deploy WSN, the transmission distance of node was 200 m. The network deployed was full coverage and no communication silos. The minimum, maximum and average connectivity was 2, 20, and 10.46, respectively. The number of nodes needed was compared with those needed by three deployment methods that used regular patterns, namely, hexagons, squares, and triangle patterns. We found that these methods needed more nodes than the method described in this paper.
- (2)
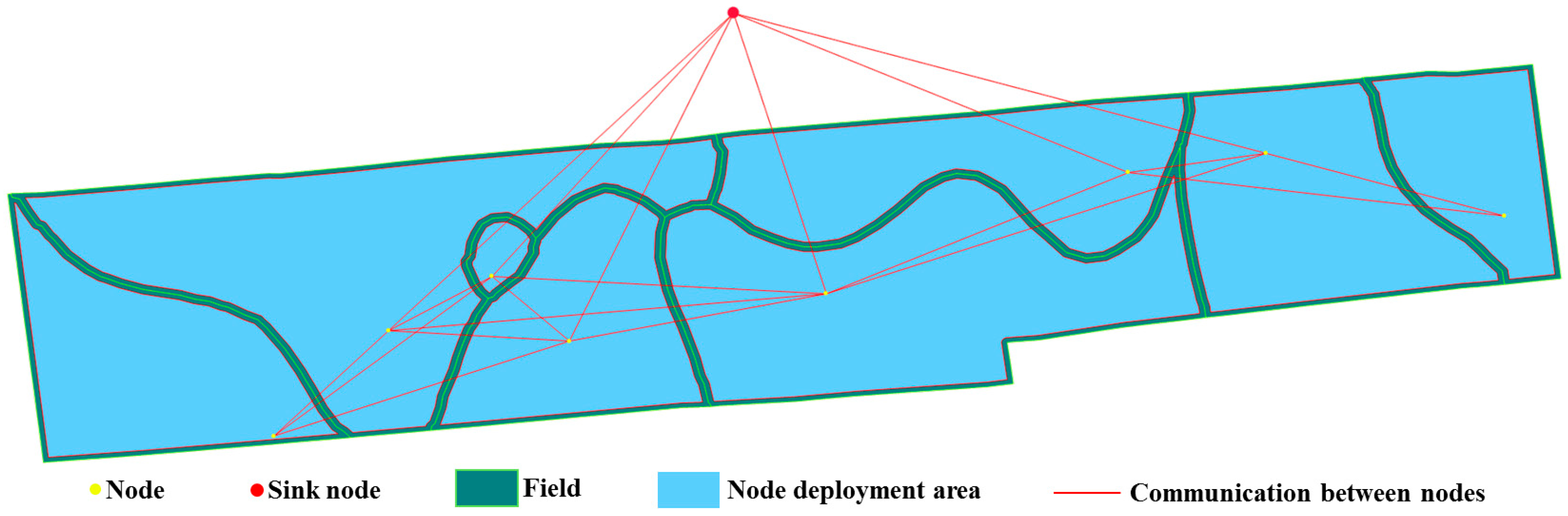
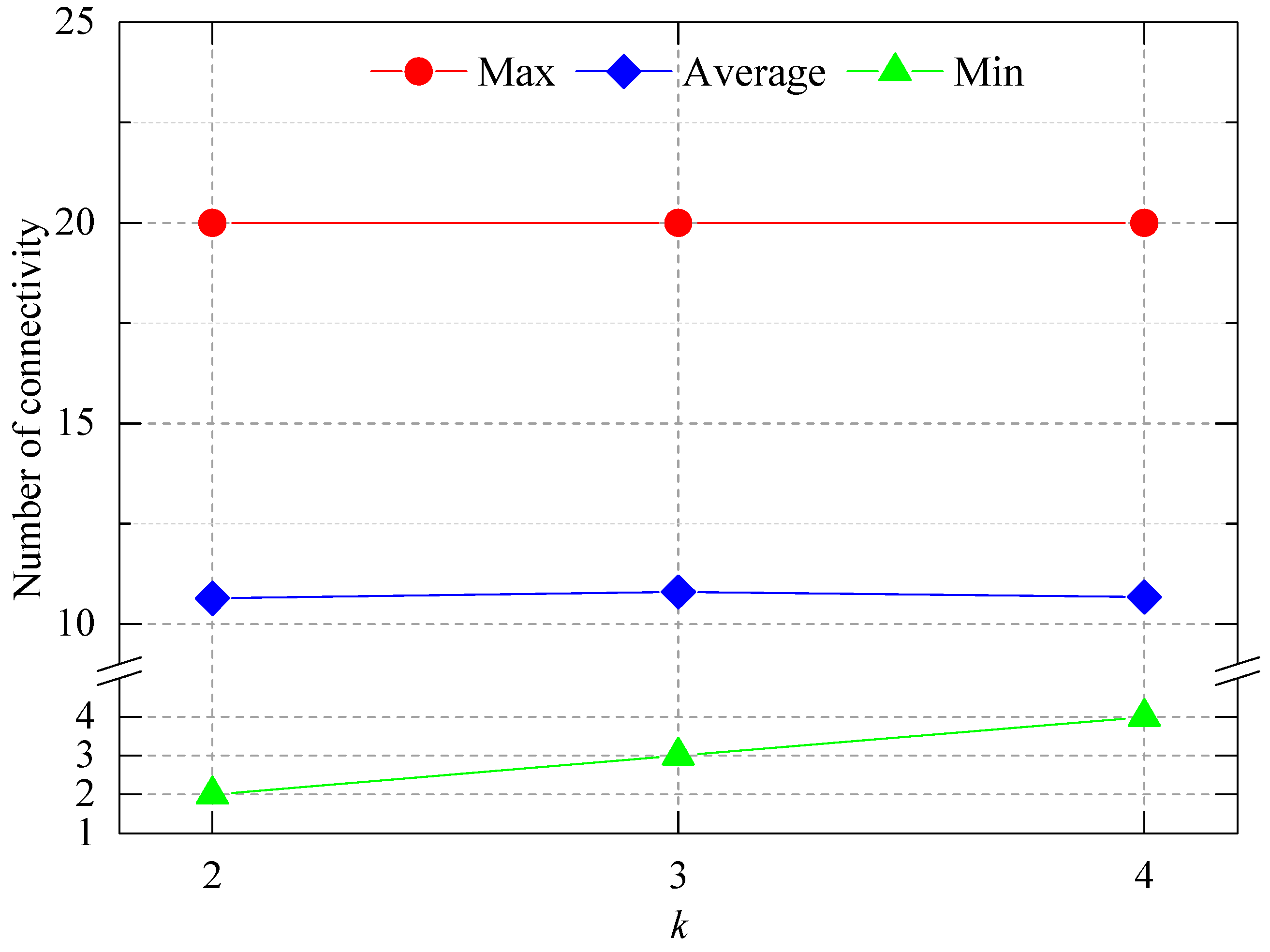
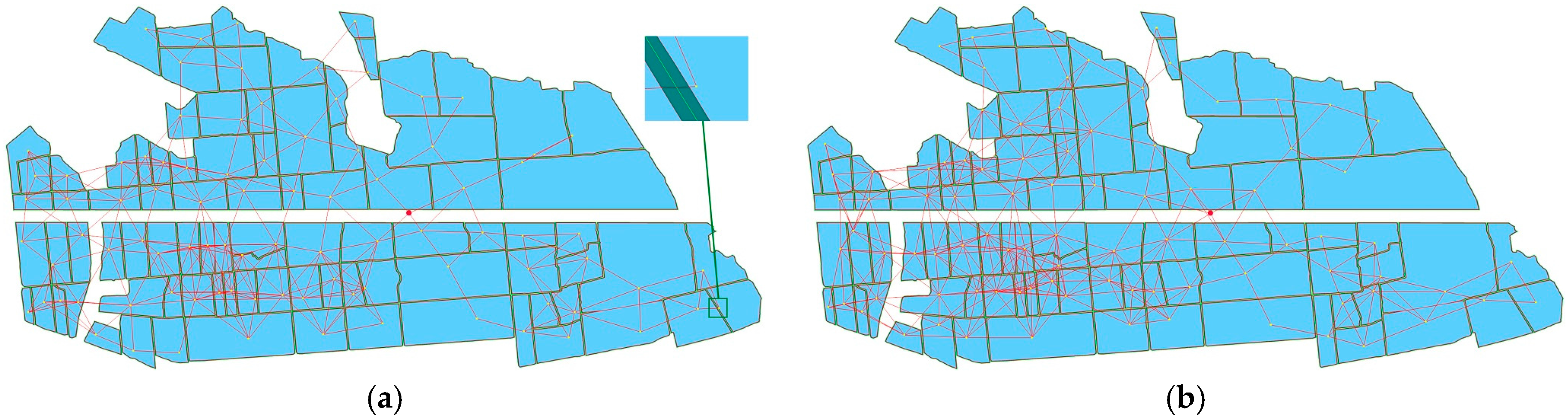
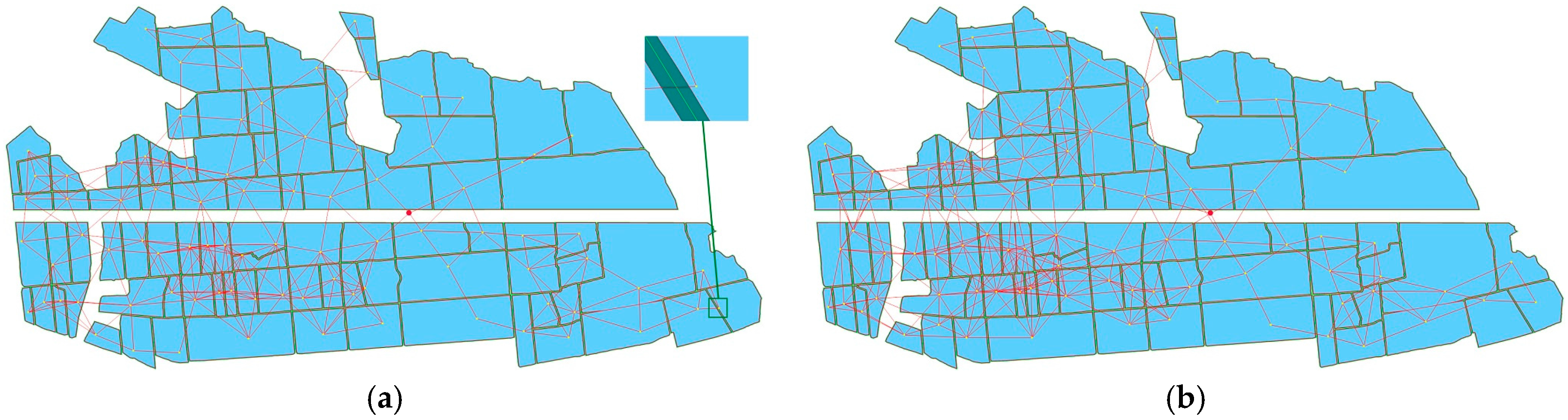
- A section of farmland of 63 ha was selected. It was divided into 90 plots as the WSN deployment area, located in Nanjing in Jiangsu Province. The connectivity of WSNs deployed by method of this paper was studied when the transmission distance was 200 m and the requirement network connectivity was 2, 3, and 4. The results showed that all WSNs were full coverage and no communication silos. In the case where the transmission distance is fixed, with the increase of requirement network connectivity, the maximum connectivity does not change, and the average connectivity changes only slightly. While, the minimum connectivity changes greatly and its value is equal to network connectivity required, indicate that the connectivity of WSNs deployed were robustness.
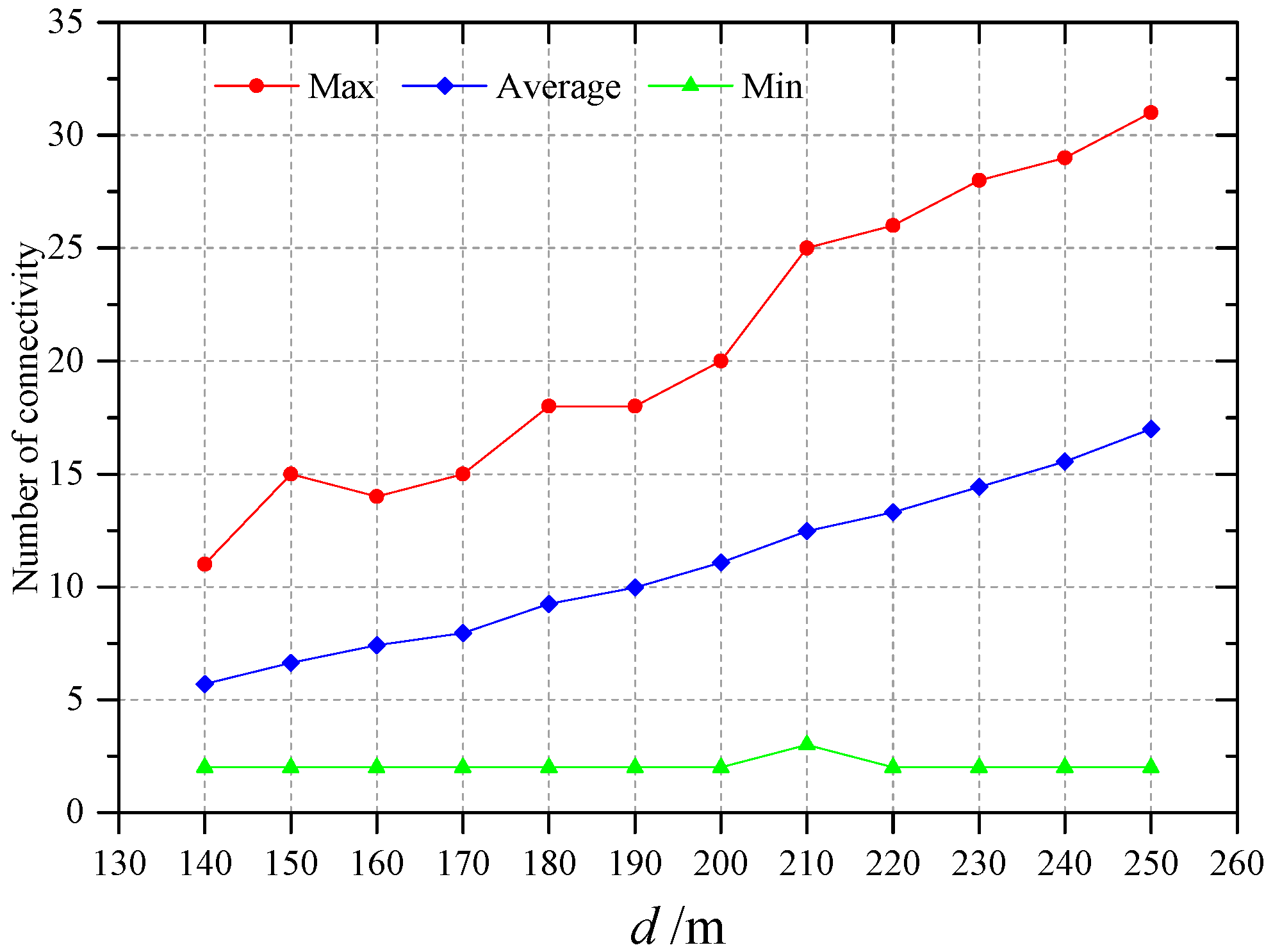
- (3)
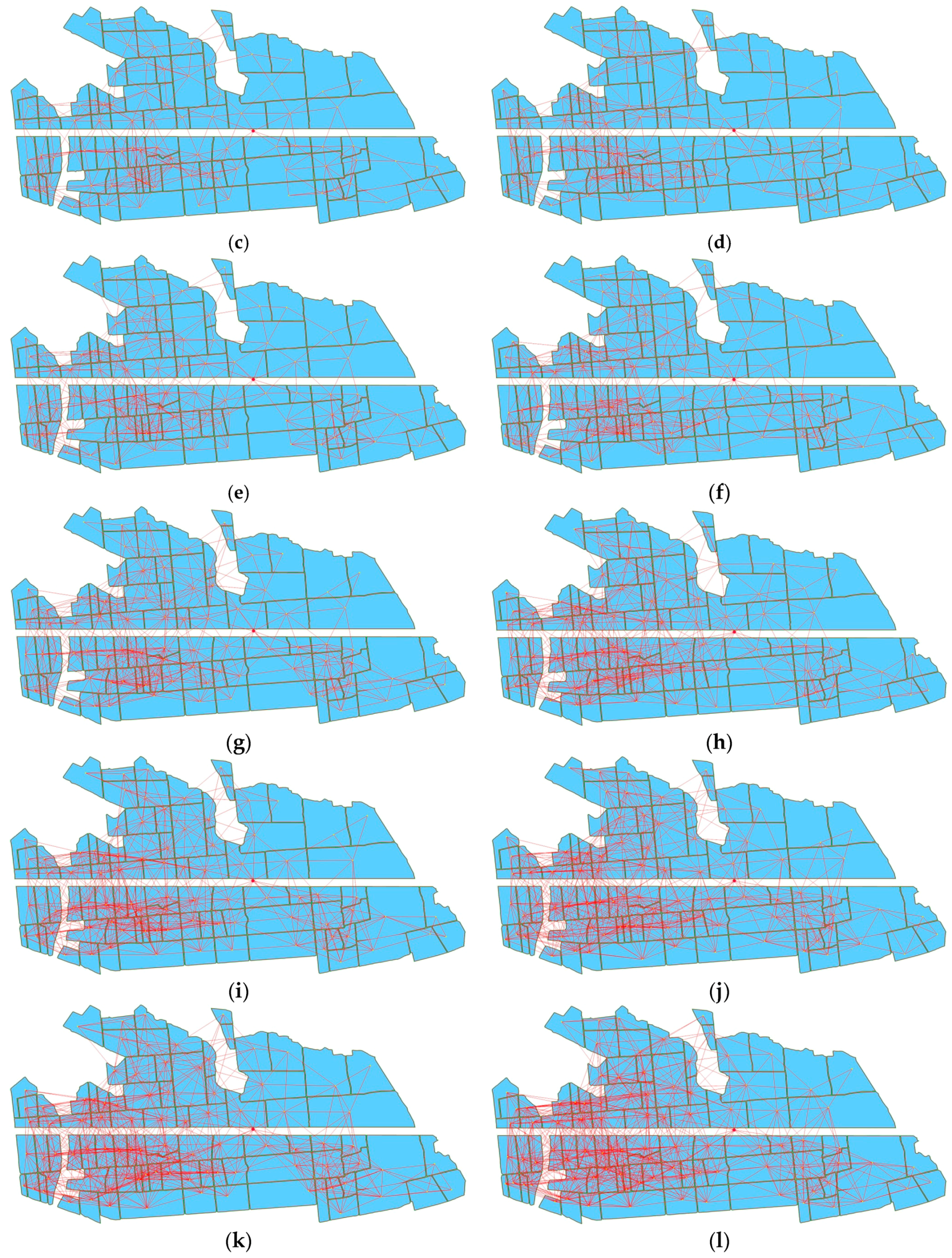
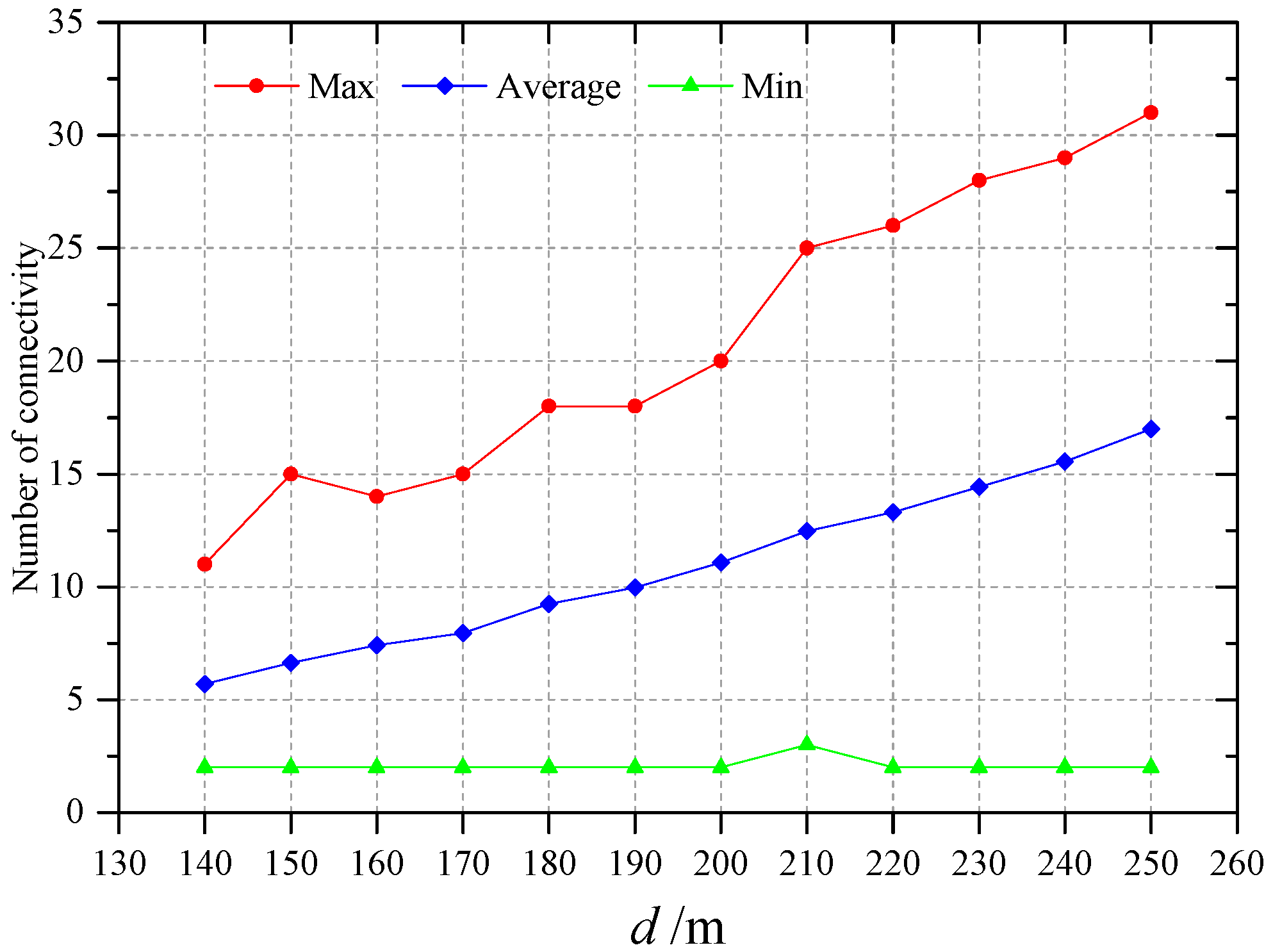
- A section of farmland of 63 ha, 90 plots was selected as the WSN deployment area, which located in Nanjing in Jiangsu Province. The connectivity of WSNs deployed by method of this paper was studied when the required network connectivity was two, and the transmission distance was from 140 m to 250 m at 10 m intervals. The results showed that, all WSNs deployed were full coverage and no communication silos. The minimum connectivity did not change with the change of transmission distance, the cause of the phenomenon may be related to the size and spatial position of farmland plots chosen for network deployment. When deploying on other farmland, the minimum connectivity may increase as transmission distance increases. The average connectivity increase linearly with the increase of transmission distance.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rad, C.-R.; Hancu, O.; Takacs, I.-A.; Olteanu, G. Smart Monitoring of Potato Crop: A Cyber-Physical System Architecture Model in the Field of Precision Agriculture. Agric. Agric. Sci. Procedia 2015, 6, 73–79. [Google Scholar] [CrossRef]
- Liu, N.S.; Cao, W.X.; Zhu, Y.; Zhang, J.C.; Pang, F.R.; Ni, J. The node deployment of intelligent sensor networks based on the spatial difference of farmland soil. Sensors 2015, 15, 28314–28339. [Google Scholar] [CrossRef] [PubMed]
- Liu, N.; Ni, J.; Dong, J.; Cao, W.; Yao, X.; Tian, Y.; Zhu, Y. Test on temperature characteristics of multi-spectral sensor for crop growth. Trans. Chin. Soc. Agric. Eng. 2014, 30, 157–164. [Google Scholar]
- Ni, J.; Dong, J.F.; Zhang, J.C.; Pang, F.R.; Cao, W.X.; Zhu, Y. The spectral calibration method for a crop nitrogen sensor. Sens. Rev. 2016, 36, 48–56. [Google Scholar] [CrossRef]
- Gemtos, T.; Fountas, S.; Tagarakis, A.; Liakos, V. Precision Agriculture Application in Fruit Crops: Experience in Handpicked Fruits. Proc. Technol. 2013, 8, 324–332. [Google Scholar] [CrossRef]
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- López Riquelme, J.A.; Soto, F.; Suardíaz, J.; Sánchez, P.; Iborra, A.; Vera, J.A. Wireless sensor networks for precision horticulture in Southern Spain. Comput. Electron. Agric. 2009, 68, 25–35. [Google Scholar] [CrossRef]
- Thomas, J.R.; Oerther, G.F. Estimating nitrogen content of sweet pepper leaves by reflectance measurements1. Agron. J. 1972, 64, 11–13. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Smith, R.B.; Pauw, E.D. Hyperspectral vegetation indices and their relationships with agricultural crop characteristics. Remote Sens. Environ. 2000, 71, 158–182. [Google Scholar] [CrossRef]
- Nguy-Robertson, A.L.; Peng, Y.; Gitelson, A.A.; Arkebauer, T.J.; Pimstein, A.; Herrmann, I.; Karnieli, A.; Rundquist, D.C.; Bonfil, D.J. Estimating green LAI in four crops: Potential of determining optimal spectral bands for a universal algorithm. Agric. For. Meteorol. 2014, 192, 140–148. [Google Scholar] [CrossRef]
- Hansen, P.M.; Schjoerring, J.K. Reflectance measurement of canopy biomass and nitrogen status in wheat crops using normalized difference vegetation indices and partial least squares regression. Remote Sens. Environ. 2003, 86, 542–553. [Google Scholar] [CrossRef]
- Zhao, D.; Reddy, K.R.; Kakani, V.G.; Read, J.J.; Koti, S. Canopy reflectance in cotton for growth assessment and lint yield prediction. Eur. J. Agron. 2007, 26, 335–344. [Google Scholar] [CrossRef]
- Main, R.; Cho, M.A.; Mathieu, R.; O’Kennedy, M.M.; Ramoelo, A.; Koch, S. An investigation into robust spectral indices for leaf chlorophyll estimation. ISPRS J. Photogramm. Rem. Sens. 2011, 66, 751–761. [Google Scholar] [CrossRef]
- Yao, X.; Yao, X.; Jia, W.; Tian, Y.; Ni, J.; Cao, W.; Zhu, Y. Comparison and intercalibration of vegetation indices from different sensors for monitoring above-ground plant nitrogen uptake in winter wheat. Sensors 2013, 13, 3109–3130. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Wang, C.; Liu, W.; Peng, Z.; Huang, S.; Huang, J.; Chen, S. Estimation of litchi (Litchi chinensis Sonn.) leaf nitrogen content at different growth stages using canopy reflectance spectra. Eur. J. Agron. 2016, 80, 182–194. [Google Scholar] [CrossRef]
- Li, F.; Mistele, B.; Hu, Y.; Chen, X.; Schmidhalter, U. Reflectance estimation of canopy nitrogen content in winter wheat using optimised hyperspectral spectral indices and partial least squares regression. Eur. J. Agron. 2014, 52, 198–209. [Google Scholar] [CrossRef]
- Evain, S.; Flexas, J.; Moya, I. A new instrument for passive remote sensing: 2. Measurement of leaf and canopy reflectance changes at 531 nm and their relationship with photosynthesis and chlorophyll fluorescence. Remote Sens. Environ. 2004, 91, 175–185. [Google Scholar] [CrossRef]
- Cui, D.; Li, M.Z.; Zhang, Q. Development of an optical sensor for crop leaf chlorophyll content detection. Comput. Electron. Agric. 2009, 69, 171–176. [Google Scholar] [CrossRef]
- Ni, J.; Wang, T.T.; Yao, X.; Cao, W.X.; Zhu, Y. Design and experiments of multi-spectral sensor for rice and wheat growth information. Trans. Chin. Soc. Agric. Mach. 2013, 44, 207–212. [Google Scholar]
- Lu, S.L.; Ni, J.; Cao, W.X.; Yao, X.; Zhu, Y. Design and experiment for crop growth information monitoring instrument based on active light source. Trans. Chin. Soc. Agric. Eng. 2014, 30, 199–206. [Google Scholar]
- Wang, X.; Zhao, C.J.; Zhou, H.C.; Liu, L.Y.; Wang, J.H.; Xue, X.Z.; Meng, Z.J. Development and experiment of portable NDVI instrument for estimating growth condition of winter wheat. Trans. Chin. Soc. Agric. Eng. 2004, 20, 95–98. [Google Scholar]
- Bauer, J.; Siegmann, B.; Jarmer, T.; Aschenbruck, N. On the potential of wireless sensor networks for the in-situ assessment of crop leaf area index. Comput. Electron. Agric. 2016, 128, 149–159. [Google Scholar] [CrossRef]
- Scotford, I.M.; Miller, P.C.H. Estimating Tiller Density and Leaf Area Index of Winter Wheat using Spectral Reflectance and Ultrasonic Sensing Techniques. Biosyst. Eng. 2004, 89, 395–408. [Google Scholar] [CrossRef]
- Rosell Polo, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef]
- Link, J.; Senner, D.; Claupein, W. Developing and evaluating an aerial sensor platform (ASP) to collect multispectral data for deriving management decisions in precision farming. Comput. Electron. Agric. 2013, 94, 20–28. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Guillén-Climent, M.L.; Hernández-Clemente, R.; Catalina, A.; González, M.R.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171, 281–294. [Google Scholar] [CrossRef]
- Baronti, P.; Pillai, P.; Chook, V.W.C.; Chessa, S.; Gotta, A.; Hu, Y.F. Wireless sensor networks: A survey on the state of the art and the 802.15.4 and ZigBee standards. Comput. Commun. 2007, 30, 1655–1695. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Weilian, S.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, S.; Song, H.; Lee, H.S. Wireless sensor network design for tactical military applications: Remote large-scale environments. In Proceedings of the MILCOM 2009—2009 IEEE Military Communications Conference, Boston, MA, USA, 18–21 October 2009; pp. 1–7.
- Badescu, A.-M.; Cotofana, L. A wireless sensor network to monitor and protect tigers in the wild. Ecol. Indic. 2015, 57, 447–451. [Google Scholar] [CrossRef]
- Sisinni, E.; Depari, A.; Flammini, A. Design and implementation of a wireless sensor network for temperature sensing in hostile environments. Sens. Actuators A Phys. 2016, 237, 47–55. [Google Scholar] [CrossRef]
- Wu, M.; Tan, L.; Xiong, N. Data prediction, compression, and recovery in clustered wireless sensor networks for environmental monitoring applications. Inf. Sci. 2016, 329, 800–818. [Google Scholar] [CrossRef]
- Tacconi, D.; Miorandi, D.; Carreras, I.; Chiti, F.; Fantacci, R. Using wireless sensor networks to support intelligent transportation systems. Ad Hoc Netw. 2010, 8, 462–473. [Google Scholar] [CrossRef]
- Ganapathy, K.; Priya, B.; Priya, B.; Dhivya; Prashanth, V.; Vaidehi, V. SOA Framework for Geriatric Remote Health Care Using Wireless Sensor Network. Procedia Comput. Sci. 2013, 19, 1012–1019. [Google Scholar] [CrossRef]
- Srbinovska, M.; Gavrovski, C.; Dimcev, V.; Krkoleva, A.; Borozan, V. Environmental parameters monitoring in precision agriculture using wireless sensor networks. J. Clean. Prod. 2015, 88, 297–307. [Google Scholar] [CrossRef]
- Rebai, M.; Le berre, M.; Snoussi, H.; Hnaien, F.; Khoukhi, L. Sensor deployment optimization methods to achieve both coverage and connectivity in wireless sensor networks. Comput. Oper. Res. 2015, 59, 11–21. [Google Scholar] [CrossRef]
- Ghosh, A.; Das, S.K. Coverage and connectivity issues in wireless sensor networks: A survey. Pervasive Mob. Comput. 2008, 4, 303–334. [Google Scholar] [CrossRef]
- Kalpakis, K.; Dasgupta, K.; Namjoshi, P. Efficient algorithms for maximum lifetime data gathering and aggregation in wireless sensor networks. Comput. Netw. 2003, 42, 697–716. [Google Scholar] [CrossRef]
- Faheem, M.; Abbas, M.Z.; Tuna, G.; Gungor, V.C. EDHRP: Energy efficient event driven hybrid routing protocol for densely deployed wireless sensor networks. J. Netw. Comput. Appl. 2015, 58, 309–326. [Google Scholar] [CrossRef]
- Tiegang, F.; Guifa, T.; Limin, H. Deployment strategy of WSN based on minimizing cost per unit area. Comput. Commun. 2014, 38, 26–35. [Google Scholar] [CrossRef]
- Aitsaadi, N.; Achir, N.; Boussetta, K.; Pujolle, G. Artificial potential field approach in WSN deployment: Cost, QoM, connectivity, and lifetime constraints. Comput. Netw. 2011, 55, 84–105. [Google Scholar] [CrossRef]
- Ferentinos, K.P.; Tsiligiridis, T.A. Adaptive design optimization of wireless sensor networks using genetic algorithms. Comput. Netw. 2007, 51, 1031–1051. [Google Scholar] [CrossRef]
- Jamil, M.S.; Jamil, M.A.; Mazhar, A.; Ikram, A.; Ahmed, A.; Munawar, U. Smart environment monitoring system by employing wireless sensor networks on vehicles for pollution free smart cities. Procedia Eng. 2015, 107, 480–484. [Google Scholar] [CrossRef]
- Aleisa, E. Wireless sensor networks framework for water resource management that supports QoS in the Kingdom of Saudi Arabia. Procedia Comput. Sci. 2013, 19, 232–239. [Google Scholar] [CrossRef]
- Nadeem, A.; Hussain, M.A.; Owais, O.; Salam, A.; Iqbal, S.; Ahsan, K. Application specific study, analysis and classification of body area wireless sensor network applications. Comput. Netw. 2015, 83, 363–380. [Google Scholar] [CrossRef]
- Li, Y.N.; Chen, I.-R. Dynamic agent-based hierarchical multicast for wireless mesh networks. Ad Hoc Netw. 2013, 11, 1683–1698. [Google Scholar] [CrossRef]
- Cree, J.V.; Delgado-Frias, J. Autonomous management of a recursive area hierarchy for large scale wireless sensor networks using multiple parents. Ad Hoc Netw. 2016, 39, 1–22. [Google Scholar] [CrossRef]
- Fischer, R.A. Definitions and determination of crop yield, yield gaps, and of rates of change. Field Crop. Res. 2015, 182, 9–18. [Google Scholar] [CrossRef]
- Mansour, M.; Jarray, F. An iterative solution for the coverage and connectivity problem in wireless sensor network. Procedia Comput. Sci. 2015, 63, 494–498. [Google Scholar] [CrossRef]
- Dandekar, D.R.; Deshmukh, P.R. Relay node placement for multi-path connectivity in heterogeneous wireless sensor networks. Proc. Technol. 2012, 4, 732–736. [Google Scholar] [CrossRef]
- Konstantinidis, A.; Yang, K. Multi-objective k-connected deployment and power assignment in WSNs using a problem-specific constrained evolutionary algorithm based on decomposition. Comput. Commun. 2011, 34, 83–98. [Google Scholar] [CrossRef]
- Nazi, A.; Raj, M.; Di Francesco, M.; Ghosh, P.; Das, S.K. Deployment of robust wireless sensor networks using gene regulatory networks: An isomorphism-based approach. Pervasive Mob. Comput. 2014, 13, 246–257. [Google Scholar] [CrossRef]
- Chouikhi, S.; El Korbi, I.; Ghamri-Doudane, Y.; Azouz Saidane, L. A survey on fault tolerance in small and large scale wireless sensor networks. Comput. Commun. 2015, 69, 22–37. [Google Scholar] [CrossRef]
- Cheng, X.Z.; Narahari, B.; Simha, R.; Cheng, M.X.; Liu, D. Strong minimum energy topology in wireless sensor networks: NP-completeness and heuristics. IEEE Trans. Mob. Comput. 2003, 2, 248–256. [Google Scholar] [CrossRef]
- Wu, Q.S.; Rao, N.S.V.; Du, X.J.; Iyengar, S.S.; Vaishnavi, V.K. On efficient deployment of sensors on planar grid. Comput. Commun. 2007, 30, 2721–2734. [Google Scholar] [CrossRef]
- Chakrabarty, K.; Iyengar, S.S.; Qi, H.R.; Cho, E.C. Grid coverage for surveillance and target location in distributed sensor networks. IEEE Trans. Comput. 2002, 51, 1448–1453. [Google Scholar] [CrossRef]
- Bell, M.; Fischer, R. Guide to Plant and Crop Sampling: Measurements and Observations for Agronomic and Physiological Research in Small Grain Cereals; CIMMYT: El Batan, Mexico, 1994. [Google Scholar]
- Zhu, C.; Zheng, C.; Shu, L.; Han, G. A survey on coverage and connectivity issues in wireless sensor networks. J. Netw. Comput. Appl. 2012, 35, 619–632. [Google Scholar] [CrossRef]
- Zou, Y.; Chakrabarty, K. A distributed coverage-and connectivity-centric technique for selecting active nodes in wireless sensor networks. IEEE Trans. Comput. 2005, 54, 978–991. [Google Scholar] [CrossRef]
- Gupta, S.K.; Kuila, P.; Jana, P.K. Genetic algorithm approach for k-coverage and m-connected node placement in target based wireless sensor networks. Comput. Electr. Eng. 2016, 56, 544–556. [Google Scholar] [CrossRef]
- De Jong, K.A.; Spears, W.M. Using Genetic Algorithms to Solve NP-Complete Problems; ICGA: San Mateo, CA, USA, 1989; pp. 124–132. [Google Scholar]
- Konstantinidis, A.; Yang, K.; Zhang, Q.; Zeinalipour-Yazti, D. A multi-objective evolutionary algorithm for the deployment and power assignment problem in wireless sensor networks. Comput. Netw. 2010, 54, 960–976. [Google Scholar] [CrossRef]
- Bhoskar, M.T.; Kulkarni, M.O.K.; Kulkarni, M.N.K.; Patekar, M.S.L.; Kakandikar, G.M.; Nandedkar, V.M. Genetic algorithm and its applications to mechanical engineering: A review. Mater. Today 2015, 2, 2624–2630. [Google Scholar] [CrossRef]
- Manea, F.; Mitrana, V. All NP-problems can be solved in polynomial time by accepting hybrid networks of evolutionary processors of constant size. Inf. Process. Lett. 2007, 103, 112–118. [Google Scholar] [CrossRef]
- Konstantinidis, A.; Yang, K. Multi-objective energy-efficient dense deployment in wireless sensor networks using a hybrid problem-specific MOEA/D. Appl. Soft Comput. 2011, 11, 4117–4134. [Google Scholar] [CrossRef]
- Wright, A.H. Genetic algorithms for real parameter optimization. In Foundations of Genetic Algorithms; Morgan Kaufmann: San Mateo, CA, USA, 1991; pp. 205–218. [Google Scholar]
- Wang, Y.; Zhang, G.; Chang, P. Improved evolutionary programming algorithm and its application research on the optimization of ordering plan. Syst. Eng. Theory Pract. 2009, 29, 172–177. [Google Scholar] [CrossRef]
- Saracoglu, I.; Topaloglu, S.; Keskinturk, T. A genetic algorithm approach for multi-product multi-period continuous review inventory models. Expert Syst. Appl. 2014, 41, 8189–8202. [Google Scholar] [CrossRef]
- Lozano, M.; Laguna, M.; Martí, R.; Rodríguez, F.J.; García-Martínez, C. A genetic algorithm for the minimum generating set problem. Appl. Soft Comput. 2016, 48, 254–264. [Google Scholar] [CrossRef]
- Kozeny, V. Genetic algorithms for credit scoring: Alternative fitness function performance comparison. Expert Syst. Appl. 2015, 42, 2998–3004. [Google Scholar] [CrossRef]
- Zhang, L.F.; Xi Zhou, C.; He, R.; Xu, Y.; Ling Yan, M. A novel fitness allocation algorithm for maintaining a constant selective pressure during GA procedure. Neurocomputing 2015, 148, 3–16. [Google Scholar] [CrossRef]
- Saaty, T.L. How to make a decision: The analytic hierarchy process. Eur. J. Oper. Res. 1990, 48, 9–26. [Google Scholar] [CrossRef]
- Hrstka, O.; Kučerová, A. Improvements of real coded genetic algorithms based on differential operators preventing premature convergence. Adv. Eng. Softw. 2004, 35, 237–246. [Google Scholar] [CrossRef]
- Pandey, H.M.; Chaudhary, A.; Mehrotra, D. A comparative review of approaches to prevent premature convergence in GA. Appl. Soft Comput. 2014, 24, 1047–1077. [Google Scholar] [CrossRef]
- Esmaelian, M.; Shahmoradi, H.; Vali, M. A novel classification method: A hybrid approach based on extension of the UTADIS with polynomial and PSO-GA algorithm. Appl. Soft Comput. 2016, 49, 56–70. [Google Scholar] [CrossRef]
- Godio, A. Multi population genetic algorithm to estimate snow properties from GPR data. J. Appl. Geophys. 2016, 131, 133–144. [Google Scholar] [CrossRef]
- Siva Sathya, S.; Radhika, M.V. Convergence of nomadic genetic algorithm on benchmark mathematical functions. Appl. Soft Comput. 2013, 13, 2759–2766. [Google Scholar] [CrossRef]
- Tang, K.-S.; Man, K.-F.; Kwong, S.; He, Q. Genetic algorithms and their applications. IEEE Signal Process. Mag. 1996, 13, 22–37. [Google Scholar] [CrossRef]
- Meruane, V.; Heylen, W. Damage detection with parallel genetic algorithms and operational modes. Struct. Health Monit. 2010, 9, 481–496. [Google Scholar] [CrossRef]
- Bai, X.; Kumar, S.; Xuan, D.; Yun, Z.; Lai, T.H. Deploying wireless sensors to achieve both coverage and connectivity. In Proceedings of the 7th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Florence, Italy, 22–25 May 2006; pp. 131–142.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Important Scale | Definition | Explanation |
|---|---|---|
| 1 | Equal importance | Two elements contribute equally |
| 3 | Moderate importance | One element is slightly favored over the other |
| 5 | Strong importance | One element is strongly favored over the other |
| 7 | Very strong importance | An element is very strongly favored over the other |
| 9 | Extreme importance | One element is extremely strongly favored over the other |
| 2, 4, 6, 8 | Between scales |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Cao, W.; Zhu, Y.; Zhang, J.; Pang, F.; Ni, J. Node Deployment with k-Connectivity in Sensor Networks for Crop Information Full Coverage Monitoring. Sensors 2016, 16, 2096. https://doi.org/10.3390/s16122096
Liu N, Cao W, Zhu Y, Zhang J, Pang F, Ni J. Node Deployment with k-Connectivity in Sensor Networks for Crop Information Full Coverage Monitoring. Sensors. 2016; 16(12):2096. https://doi.org/10.3390/s16122096
Chicago/Turabian StyleLiu, Naisen, Weixing Cao, Yan Zhu, Jingchao Zhang, Fangrong Pang, and Jun Ni. 2016. "Node Deployment with k-Connectivity in Sensor Networks for Crop Information Full Coverage Monitoring" Sensors 16, no. 12: 2096. https://doi.org/10.3390/s16122096
APA StyleLiu, N., Cao, W., Zhu, Y., Zhang, J., Pang, F., & Ni, J. (2016). Node Deployment with k-Connectivity in Sensor Networks for Crop Information Full Coverage Monitoring. Sensors, 16(12), 2096. https://doi.org/10.3390/s16122096