1. Introduction
The growing number of vehicles on the road in recent years has resulted in a general lack of parking availability. This situation implies many disadvantages when commuting, such as driver discomfort and time consumption, which cause additional stress to drivers, and thus, increase the risk of road accidents when looking for available parking spaces. Furthermore, this issue is an important cause of extra carbon dioxide emissions, which deteriorate the environment, especially when many people are simultaneously searching for available parking spaces at peak hours. Therefore, innovative systems that meet the high demands of efficient parking management are urgently needed. This paper proposes the use of wireless technologies of smartphones to develop a smart parking management system that can improve the usage of parking facilities and the user experience of drivers by simplifying the process of finding available parking.
In the design of a solution based on smartphones and wireless technologies, an additional difficulty appears when vehicles enter indoor installations, such as indoor parking facilities where the use of GPS (Global Positioning System) or indoor triangulation is not possible or precise enough to provide useful data. In some indoor parking facilities, a simple system is used that automatically detects the arrival and departure of vehicles through various sensors, in order to conclude whether there is still any available parking space, as well as to display global updated information on parking space occupancy. However, since this occupancy information is given to all drivers at the same time, it could produce new congestion because many drivers would drive to the same zones. The system here proposed offers each driver with a specific recommended route to minimize the expected search time. In particular, the proposal estimates the occupancy from entrance counters and the information sensed by the smartphones running the application, this information is centrally collected, and then the server running the forecast method disseminates the processed information to the vehicles with the application, which then calculates the recommended route.
In this work, a novel approach for a parking solution based on a combination of available advanced technologies and a mathematical forecasting method is introduced [
1]. On the one hand, it involves a smartphone application that uses accurate and cheap technologies for indoor positioning. On the other hand, cellular automata are used to model the usual behaviour of drivers in parking facilities. In particular, the system applies the idea behind a modified version of the game of life to capture some features of parking occupancy based on common user behaviour, in order to try to reduce the time to find available parking spaces.
The described service has been defined to be used from the beginning so that it can be gradually adopted and smartly improved through its use in order to raise the success rate. The proposal has been simulated and the obtained conclusion is that the service is low-cost and energy-efficient for end users, and an effective solution for managers of parking facilities.
This paper is structured as follows.
Section 2 briefly describes some related work.
Section 3 presents the main features of the proposed scheme including a parking locator service that uses smartphones, a forecast parking system based on cellular automata, and a driver-assistance method. Some results for a basic simulation and a functional demonstration of the service are shown in
Section 4. Finally, this work ends with some conclusions and open problems.
3. Proposed Scheme
3.1. Smartphone-Based System for Parking Occupancy Detection
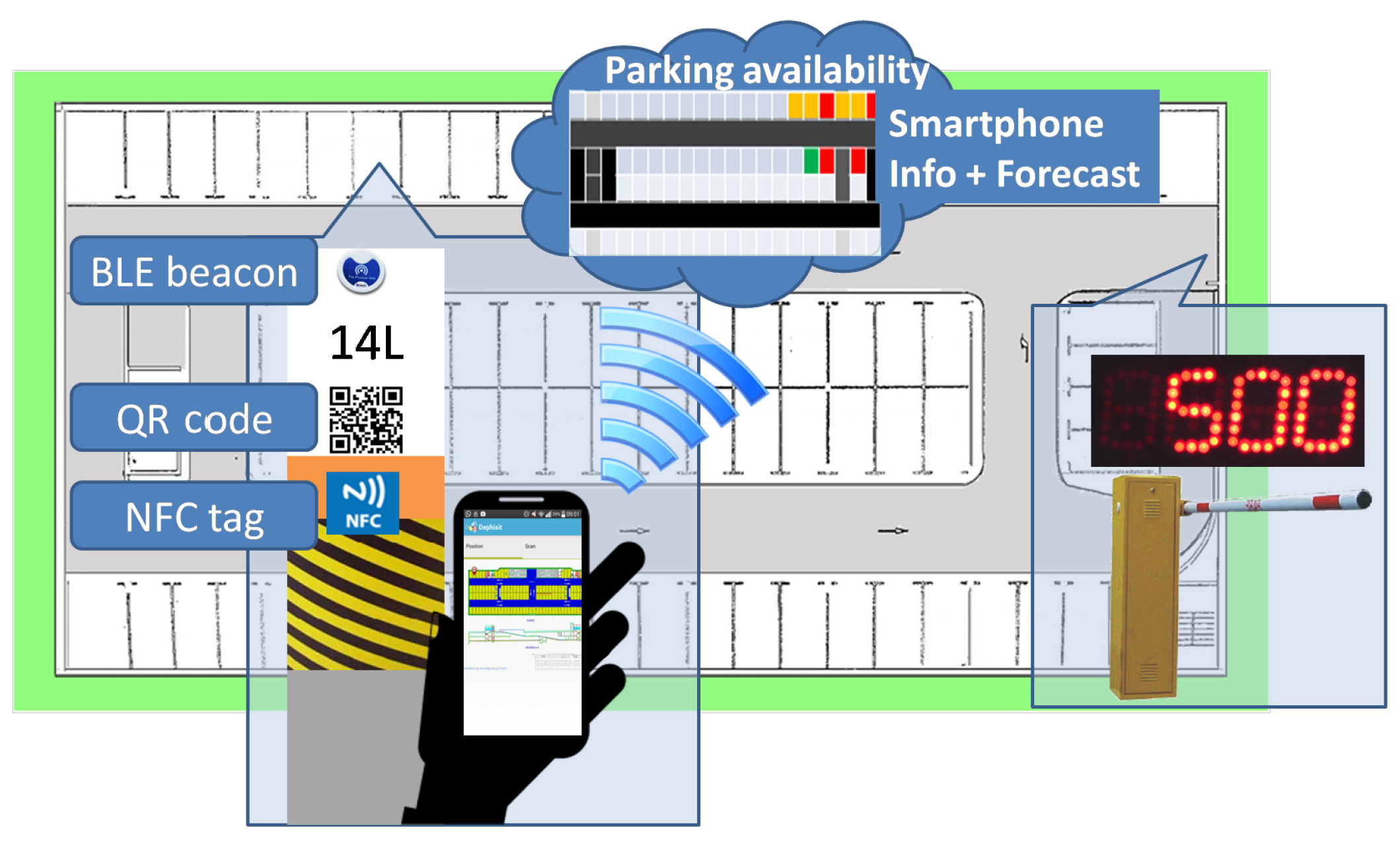
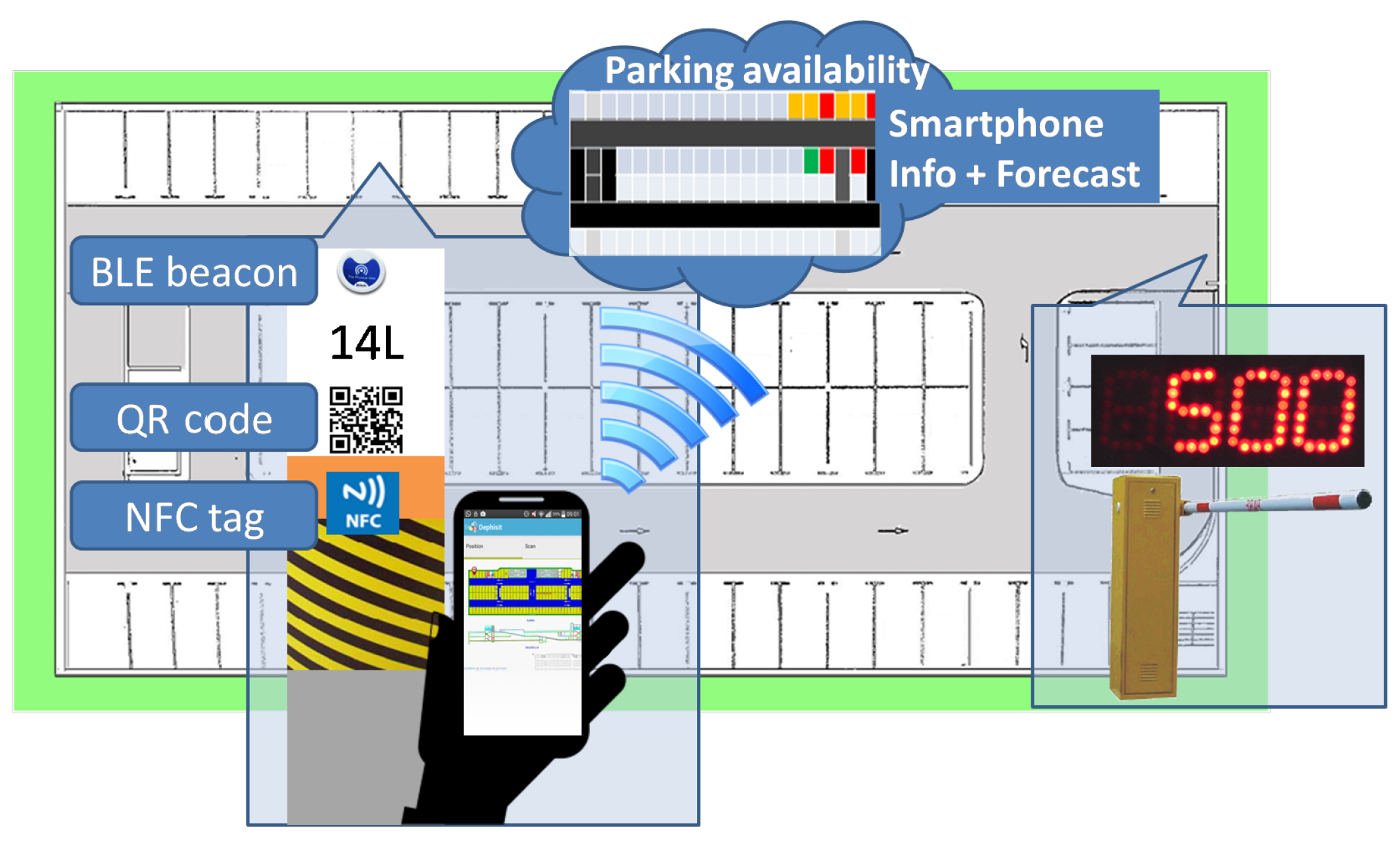
This paper proposes a low-cost solution for indoor parking facilities, which requires no fixed physical component to control parking availability. The idea, as shown in
Figure 3, consists of two main components. The first component is a smartphone application that sends data on actual occupancy to a server and receives from it information to help drivers find parking spaces that are available with a high probability. The second component is a server that manages the data on the actual occupancy of parking spaces received from the smartphone application and the entrance counter, applies a predictive method on them, and sends back to the smartphone a recommendation about where to park. The first component is described in this section, while the second one is described in the next section.
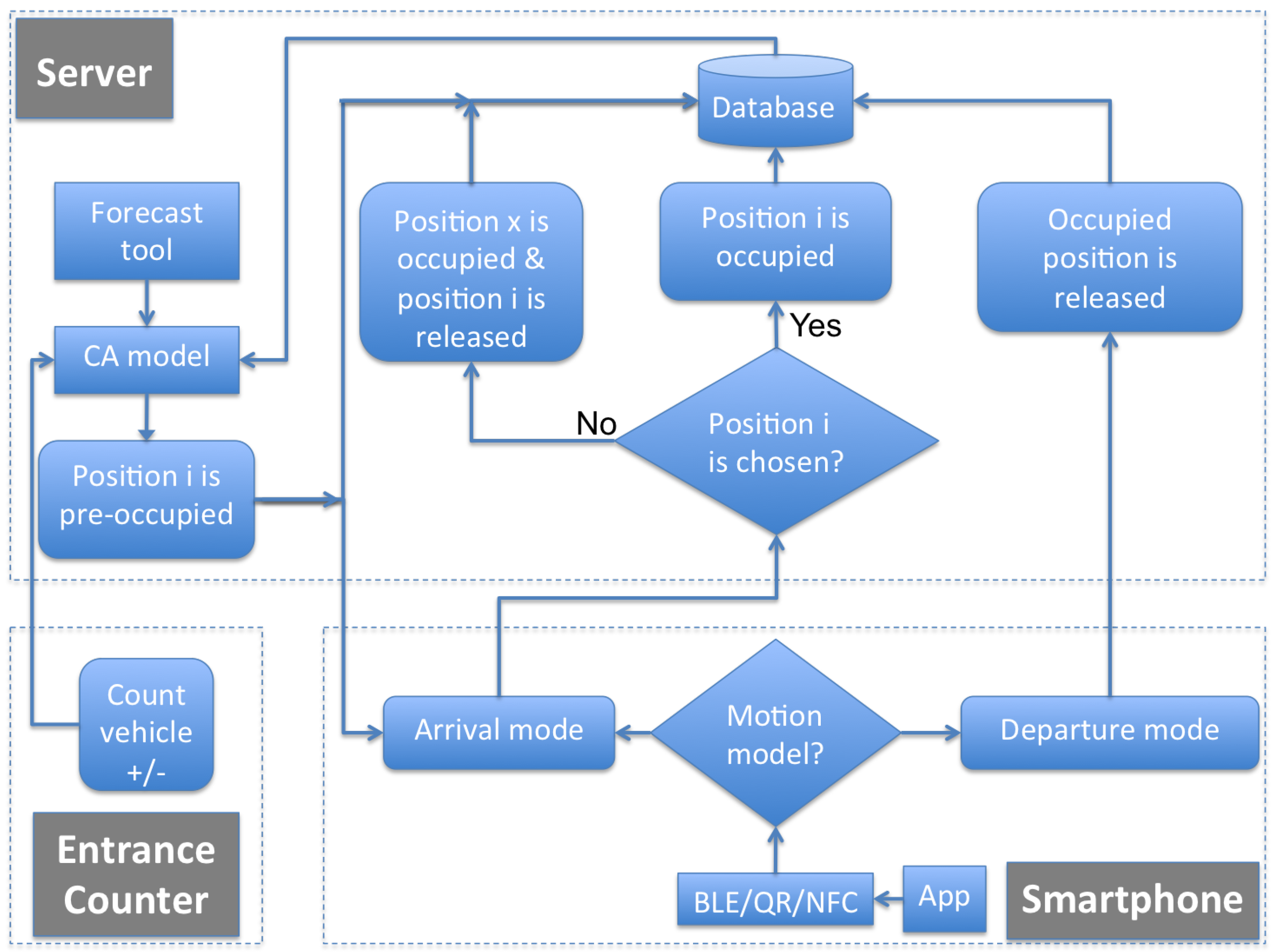
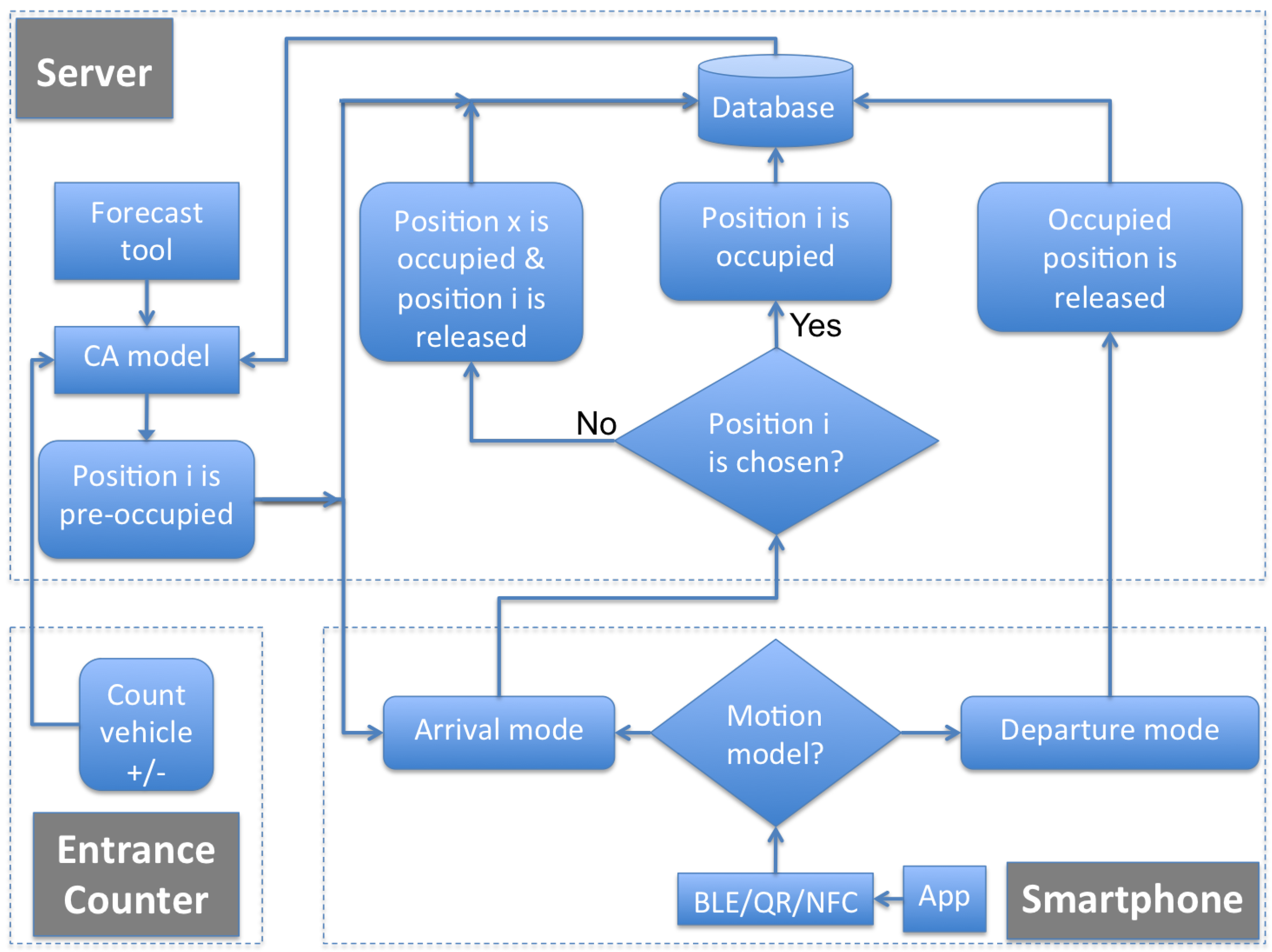
As shown in
Figure 4, the proposed platform has been implemented through a distributed architecture of smartphones and a centralized server.
On the one hand, the mobile application uses a combination of technologies formed by QR codes, NFC tags and BLE Physical Web Beacons to determine actual occupancy, and sends back these data to a server. Depending on the technologies (BLE, NFC, QR) available on the smartphone, the proposed system uses and integrates different types of data. If it has Bluetooth, the smartphone application first uses the Android platform SDK (Software Development Kit) to do a scanning of the presence of any BLE signal nearby at the parking facility. If it detects any, the application does measurements of the received RSSI (Received Signal Strength Indicator) from all detected beacons, and sends these measurements to the server together with the MAC (Media Access Control) address received from each scanned beacon. With these data, at the server, it is possible to compute the approximate position of the vehicle depending on the locations of the detected BLE devices. Regarding the use of BLE for indoor positioning, it has been proved that adopting BLE beacons as signal sources and RSSI as measurement is a reasonable solution because this technology allows obtaining over 95% of correct estimation rate [
41]. Otherwise, if the smartphone has no Bluetooth, the driver must use either NFC or QR to scan the signal or code located at every parking space by approximating the smartphone to the NFC device or printed QR code available near each parking space. In both cases, the scanned data are sent through the application to the server so that the location of the vehicle can be stored. The application is able to automatically identify whether the vehicle is occupying or releasing a parking space. Again, if the smartphone has Bluetooth, the hands-free device of the vehicle allows automatic knowledge of when the vehicle is being started or when it is being stopped, concluding that the corresponding parking space is being released or occupied. Otherwise, if the smartphone has no Bluetooth, the driver must use either NFC or QR to scan the signal or code located at every parking space to indicate to the server when it is releasing a parking space.
On the other hand, the server centralizes all the information regarding available, occupied and possibly occupied parking spots and shows data regarding occupied and recently released parking spaces. Taking into account that not all drivers will have the application running on their smartphones, the predictive tool described in the next section is used to estimate which parking spaces are available in the parking facility. Thanks to the entrance counter, the server knows when each vehicle arrives at the parking facility. Thus, through the forecast tool, it chooses for that vehicle a possibly available position i and marks it as pre-occupied. If the vehicle is not using the smartphone application, the position i chosen for it remains as possibly occupied in the database. Otherwise, if the vehicle is using the smartphone application but occupies another position x, the position x changes to occupied and the position i is released in the database. When a vehicle leaves the parking facility, also thanks to the entrance counter, the server knows it. In this case, a position is always released in the database.
Service providers establish the interfaces to bridge parking facilities and users over the Internet, and develop tools to create and maintain the parking facilities database. Operators of parking facilities use information from user applications and the predictive tool to monitor the occupancy of each parking space and to publish the parking space occupancy online forecasting information in real time. Thus, the Internet is used in the proposed scheme to connect the different parties, including parking facilities, customers and service providers.
The information on each parking space includes its geographical coordinates, occupancy status, etc. A lightweight client program on each user smartphone allows accessing the service through the Internet to collect information about the parking facility and to store and send data about the current parking space occupancy.
The server and the database have been developed using several frameworks that allow the creation of efficient and scalable solutions. In particular, the involved technologies are the following:
Node.js is an open source, cross-platform runtime environment for server-side and networking applications, which are written in JavaScript, and can be run within the Node.js runtime on multiple platforms. It is commonly used for real-time web applications.
Express.js is a Node.js web application framework, designed for building single-page, multi-page, and hybrid web applications.
MongoDB is a cross-platform document-oriented database. Classified as an NoSQL (Not only SQL) database, MongoDB avoids the traditional table-based relational database structure in favour of JSON (JavaScript Object Notation) like documents with dynamic schemas.
Mongoose is a framework that allows the modelling of data from a MongoDB database, allowing CRUD (Create, Read, Update and Delete) operations.
Angular.js is an open-source web application framework for client-side MVC (Model-View-Controller) architecture.
Bootstrap is a front-end that works as an interface for the user, unlike the server-side code that resides on the back-end or server.
Embedded JavaScript cleans the HTML out of JavaScript with client side templates.
The parking service exploits an accurate positioning solution based on QR codes, NFC tags and BLE Physical Web Beacons. In its development, the user operations are conducted on the parking client software. The application has been developed for the Android operating system and has been tested with a Samsung smartphone (Samsung, Suwon, Korea) that runs Android 4.4 (Google, Mountain View, CA, USA). The software development has been done with Android Studio. The main APIs (Application Programming Interfaces) and resources for the smartphone application are:
An image-based floor map, used as indoor map.
Physical Web API, used to acquire the measurements of the physical web beacons for indoor positioning.
ZXing API, used to capture QR codes [
42].
BLE beacons have been used for indoor positioning because this kind of positioning solution is cost-efficient and can be operated in conjunction with communication services. In addition, the interaction between BLE beacons and the smartphone can be automated so that the user does not have to do anything anything either on arrival or on departure. The inconvenience is that location is not as precise as with QR or NFC solutions. Unlike traditional solutions, which are usually based on specific hardware tags for positioning, the proposed solution uses the built-in hardware of a smartphone to collect the signals of the beacons, and performs positioning estimation using information from the server. Experiments with BLE-based solutions for indoor positioning have shown that the number of required beacons is lower compared with solutions based on other technologies. Thus, for instance, the work [
43] proved that in a room of 204 m
partially separated by a wall in the middle, five beacon nodes produced a fine accuracy confidence, and the main problem was that often at least one beacon is hidden behind the wall. Parking areas do not have many dividing walls so this problem does not highly affect the proposed scheme. We performed our own experiments and checked that in the parking of
Figure 5, nine beacons were enough to cover all parking spaces with very high precision.
QR codes and NFC tags are cheap technologies that can be used to solve the indoor location problem. These technologies are really convenient for the proposal because they can easily be used to remind users where a vehicle is parked, which can be used as an added value of the application to encourage its use. In this case, to find the best walking route, the pathfinding framework [
44] has been used in the implementation. These technologies are easy to use but have the inconvenience that they are not automatic. Thus, in order to occupy a parking space in the server, the user has to take a picture of the QR code or put their smartphone close to the NFC tag. Thus, it is possible that many users will not use the technology because they will forget to perform this simple step. The release of a parking space is automatic when the smartphone detects the connection with the hands-free system.
3.2. CA-Based System for Parking Forecast
The described mobile application allows identifying parking spaces by using either BLE or QR/NFC. However, when such data are missing because not all vehicles are provided with hands-free devices and/or drivers may forget to scan codes or tags when occupying or releasing spaces, the CA-based system presented in this section is essential for the operation of the proposal.
In order to model the occupancy behaviour of parking spaces, different use cases have been studied. For instance, in a parking facility with just one Point Of Exit (POE), most users try to park their vehicles in places close to the POE. Indeed, there are some studies that state a relationship between the choice of parking space and the distance to ticket machines, entrances, exits, final destinations, etc. [
45]. In addition, distinct behaviour can be distinguished inside the parking facility depending on the hour of the day, the day of the week, etc. Thus, occupancy of parking spaces seems not to be a random decision but to follow clear rules. In this work, a CA-based model is used to forecast parking occupancy.
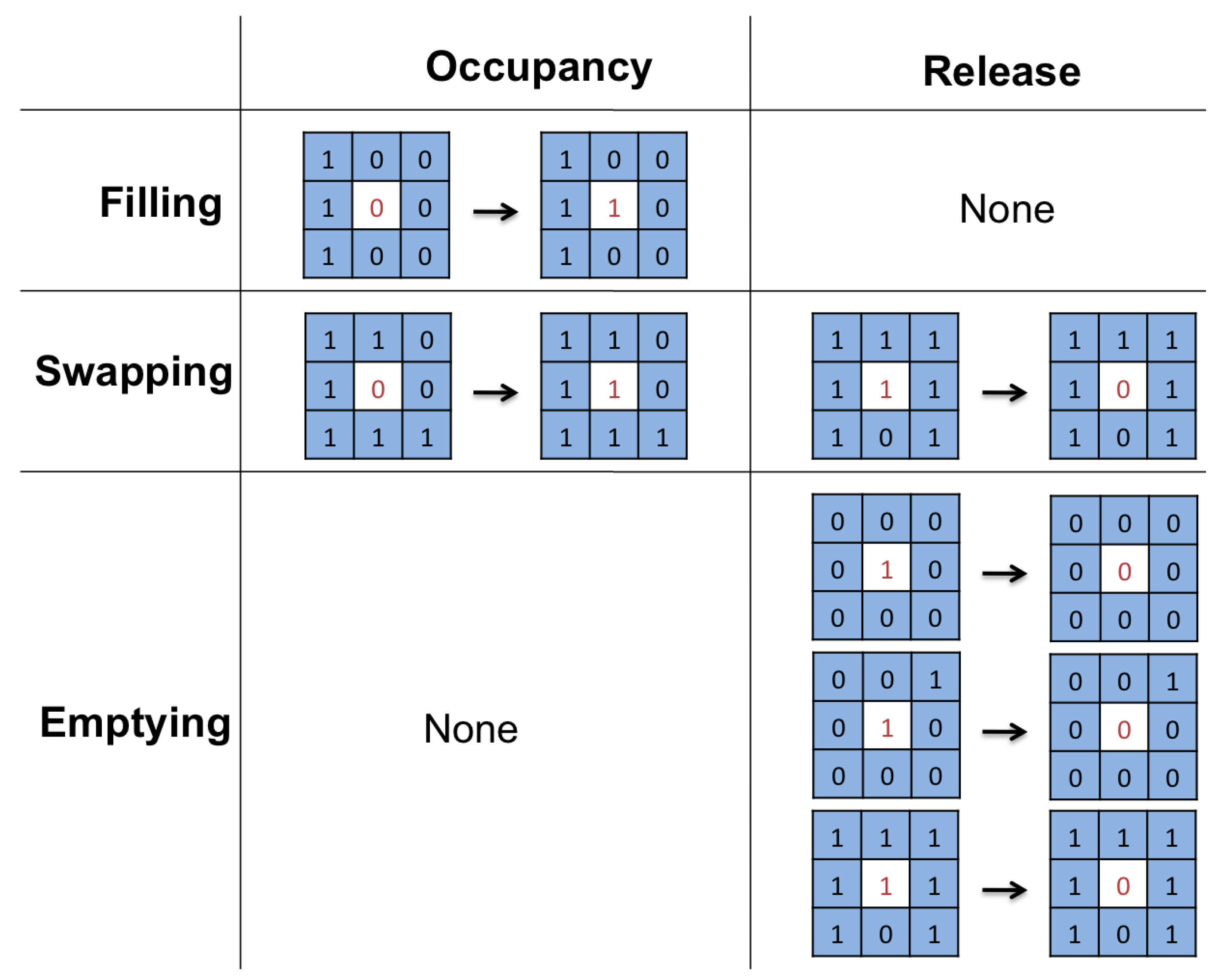
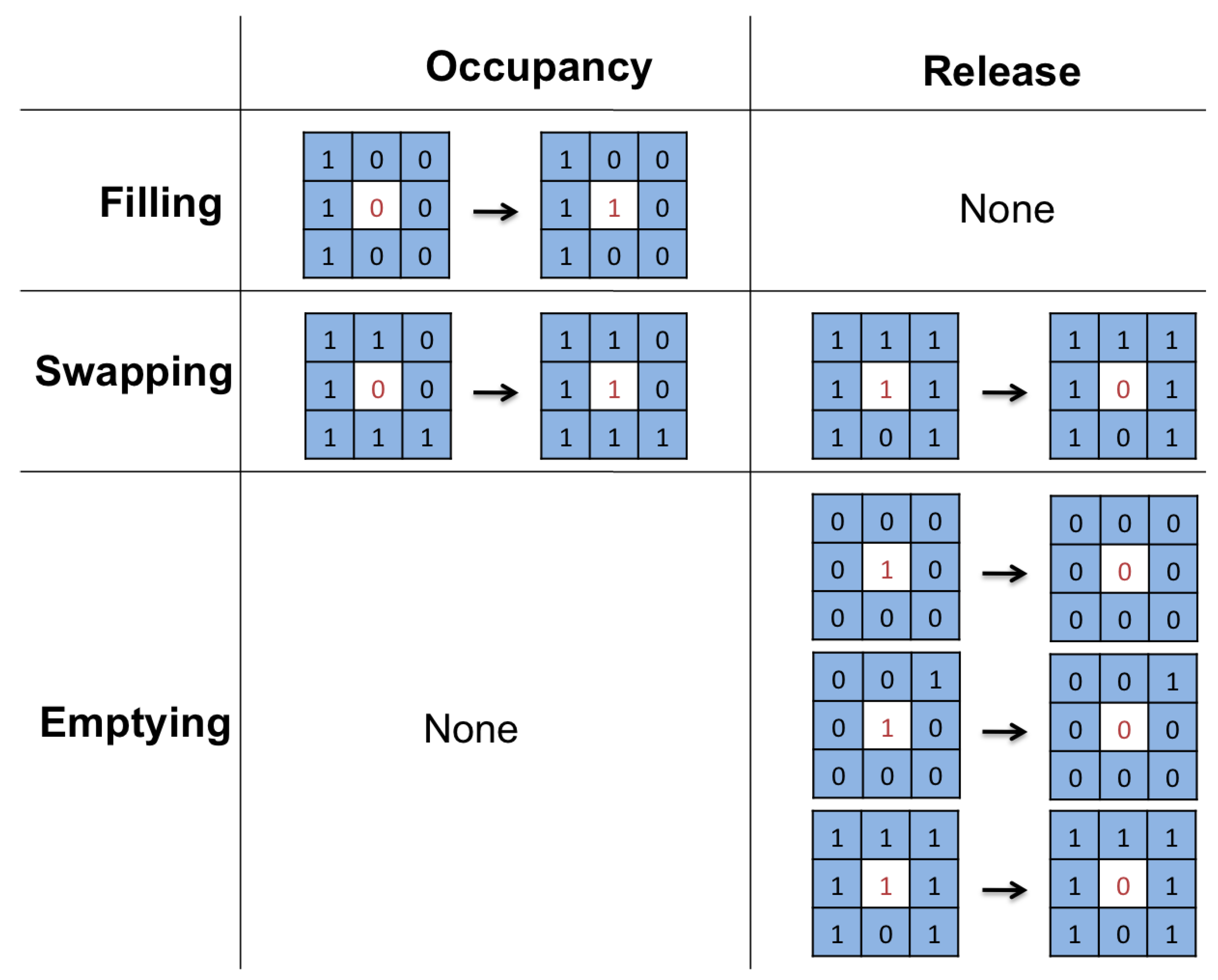
The CA used in our model to describe driver behaviour in indoor parking is defined according to three basic stages that can be distinguished during parking occupancy: Stage 1 (Filling), Stage 2 (Swapping) and Stage 3 (Emptying). The first and last stages correspond, respectively, to the opening and closing of the parking facilities. Vehicle behaviour with respect to a parking space is defined in each stage depending on the space state (available or occupied). In this work, a modified Conway’s game of life is used for the parking model [
36], where living cells correspond to occupied parking spaces while dead cells are available parking spaces. The forecast tool based on this automaton is more accurate during Stage 1 (Filling) than in the other two stages. In that stage, if the tool fails to recommend an available parking space, it is highly probable that there are other available parking spaces near the recommended one.
The used model defines a matrix where different positions are parking spaces or lanes. Roads can be horizontal or vertical and can have one or two lanes, and every parking space must be accessible from a road. The algorithm includes a loop whose iterations define the state of each parking space.
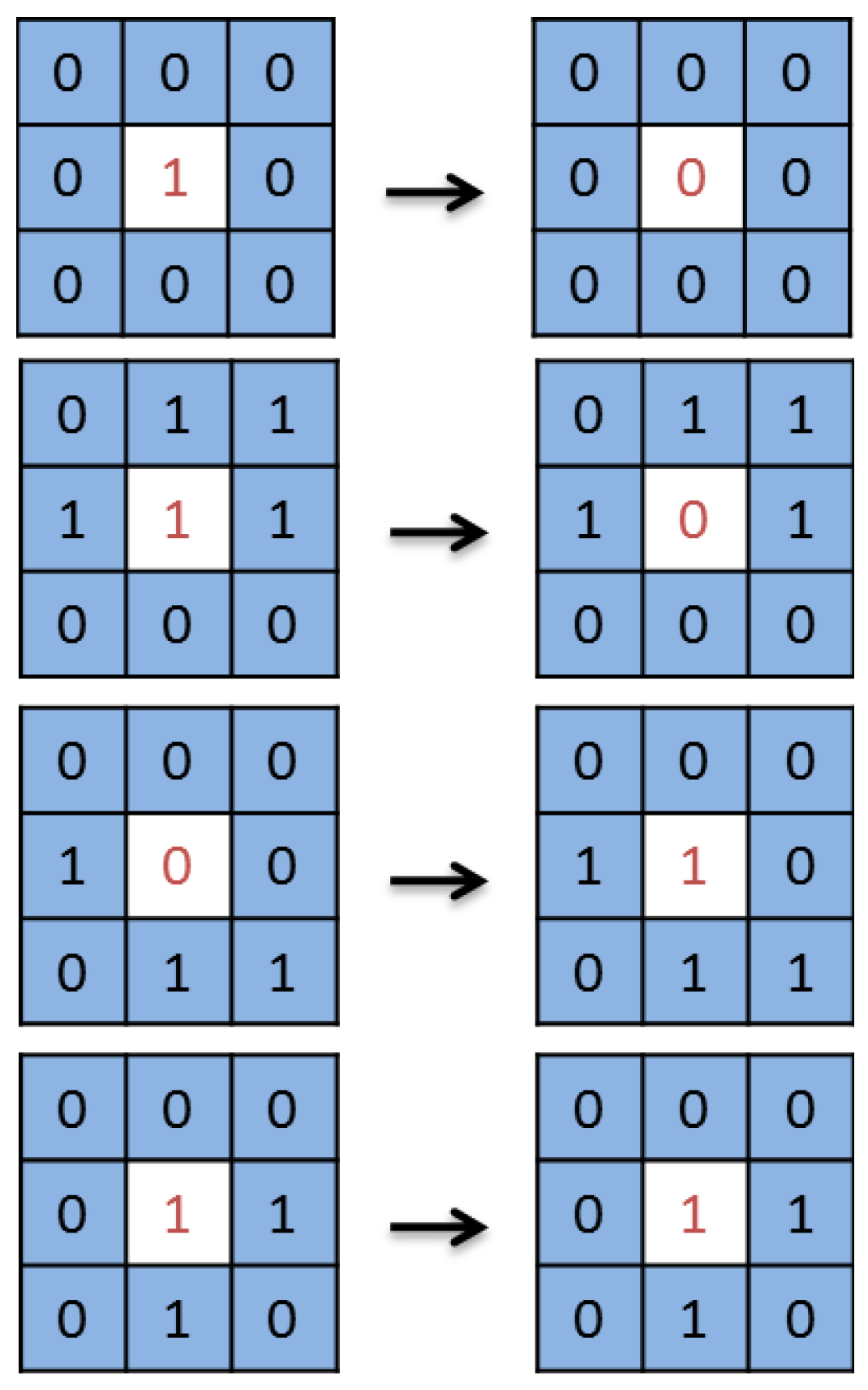
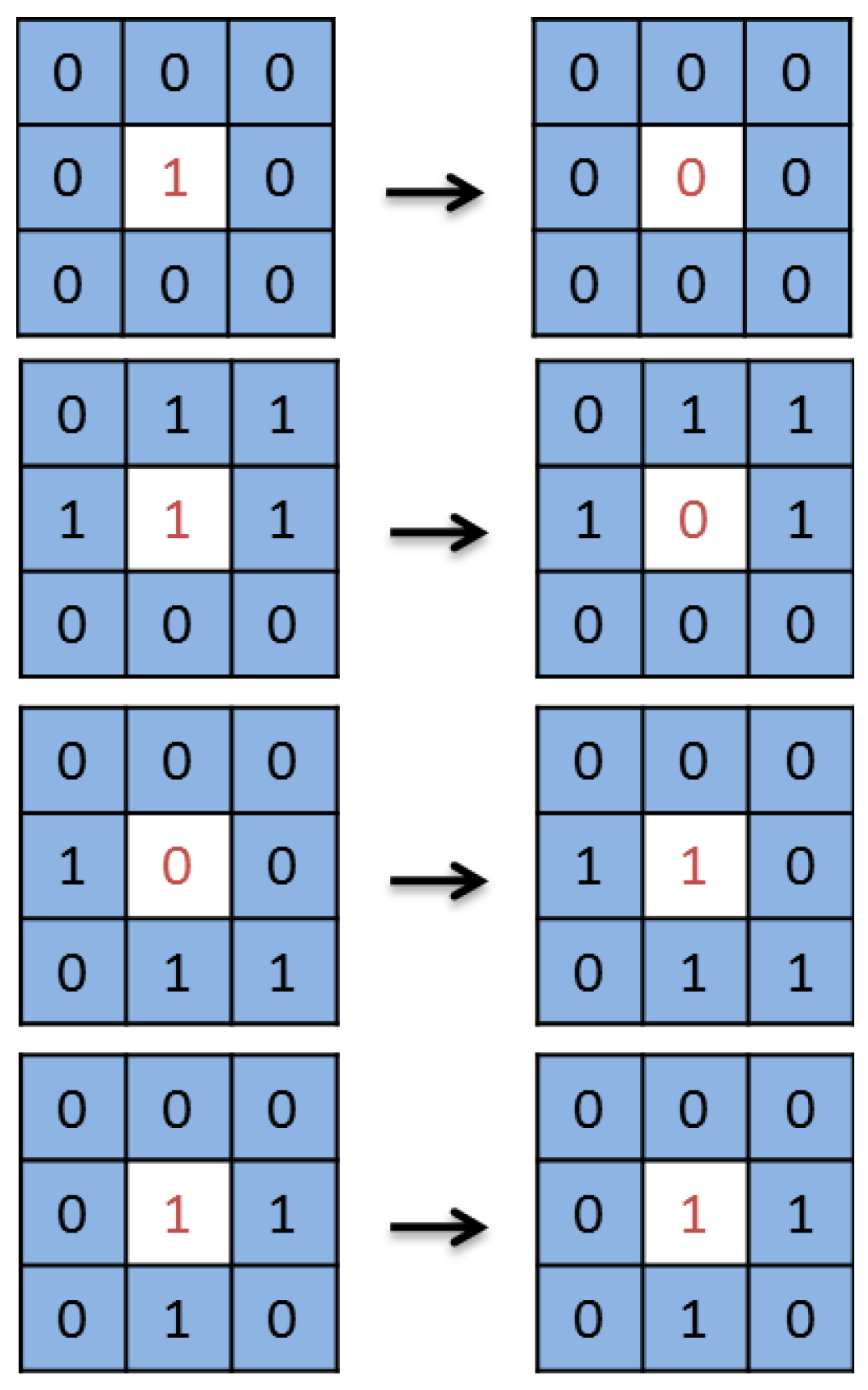
Figure 6 shows an example of the rules applied in the proposed system, defined following the current behaviour pattern seen in parking spaces in order to simulate it. Thus, the system calculates the next value of each cell
taking into account the values of all its neighbours
,
,
,
,
,
,
and
.
This model follows from a study of indoor facilities with parking fees, where the conclusion is that driver behaviour can be modelled using a modified version of the game of life. During the Filling Stage, vehicles tend to occupy parking spaces in a predefined way. During the Emptying Stage, vehicles tend to release parking spaces in a random way. Finally, during the Swapping Stage, available parking spaces mainly surrounded by occupied ones are quickly occupied, available parking spaces mainly surrounded by available ones remain available, occupied parking spaces mainly surrounded by available ones are quickly released, and occupied parking spaces mainly surrounded by occupied ones are quickly released.
The adjustment of the game of life to the proposed model is shown below:
Filling Stage
- -
Empty cells with three or more neighbours become occupied.
- -
Empty cells with two or fewer neighbours remain empty.
- -
Occupied cells remain occupied.
Swapping Stage
- -
Empty cells with six or more neighbours become occupied.
- -
Empty cells with five or fewer neighbours remain empty.
- -
Occupied cells with six or more neighbours are released.
- -
Occupied cells with three to five neighbours remain occupied.
- -
Occupied cells with two or fewer neighbours are released.
Emptying Stage
- -
Empty cells remain empty.
- -
Occupied cells with seven or more neighbours are released.
- -
Occupied cells with three to six neighbours become occupied.
- -
Occupied cells with two or fewer neighbours are released.
The interpretation of the above rules is the following. The first three rules of the Filling stage describe a strategy according to which vehicles tend to park near popular places like POEs. The three rules of the Swapping stage can be summed up as behaviour similar to the game of life. Finally, the three rules of the Emptying stage try to reflect the usual behaviour in parking facilities when users are leaving because the parking facility is about to close. This cellular automaton is deterministic and the stationary state depends only on the initial conditions of actual occupancy data provided by the smartphones of drivers. This automaton tries to mimic the complex interactions between vehicles looking for available parking spaces. However, the model does not fully reflect the behaviour of all drivers because not all of them react in the same way, as some vary their parking behaviour without any obvious reasons. Therefore, during the practical implementation of the system under real conditions during a period of time, it could be convenient to introduce some type of random noise in the model so that it would reflect a more realistic description including this type of user.
3.3. Driver-Assistance System
A simple adaptive recommendation mechanism for smart parking is included in the proposal.
The application computes the fastest route to the pre-occupied position recommended by the forecast tool, on the basis of the parking map information provided by the parking management. Afterwards, it shows the route to the driver, including navigation directions to the destination like turn left, turn right, or go straight ahead.
When reaching the recommended position, if the vehicle cannot park there, the application reinitiates automatically to the arrival mode so that a new recommended closer position and faster route are provided.
If positions close to each other were recommended to many users at the same time, the routes to these positions would get congested. Thus, to avoid this, the server tool computes several best positions according to the forecast model and the actual position of each vehicle, and presents different recommendations chosen at random to those users arriving together.
In this work, the goal is not only to reduce time and fuel consumption but also to allow the easy finding of a parking space in indoor parking areas. Thus, the innovative CA mechanism combined with the adaptive recommendation mechanism provides the following benefit. The driver can park in a preferred parking space by avoiding probably occupied parking spaces, so the lack of delay during the search will prevent them from feeling annoyed.
4. Simulation and Implementation
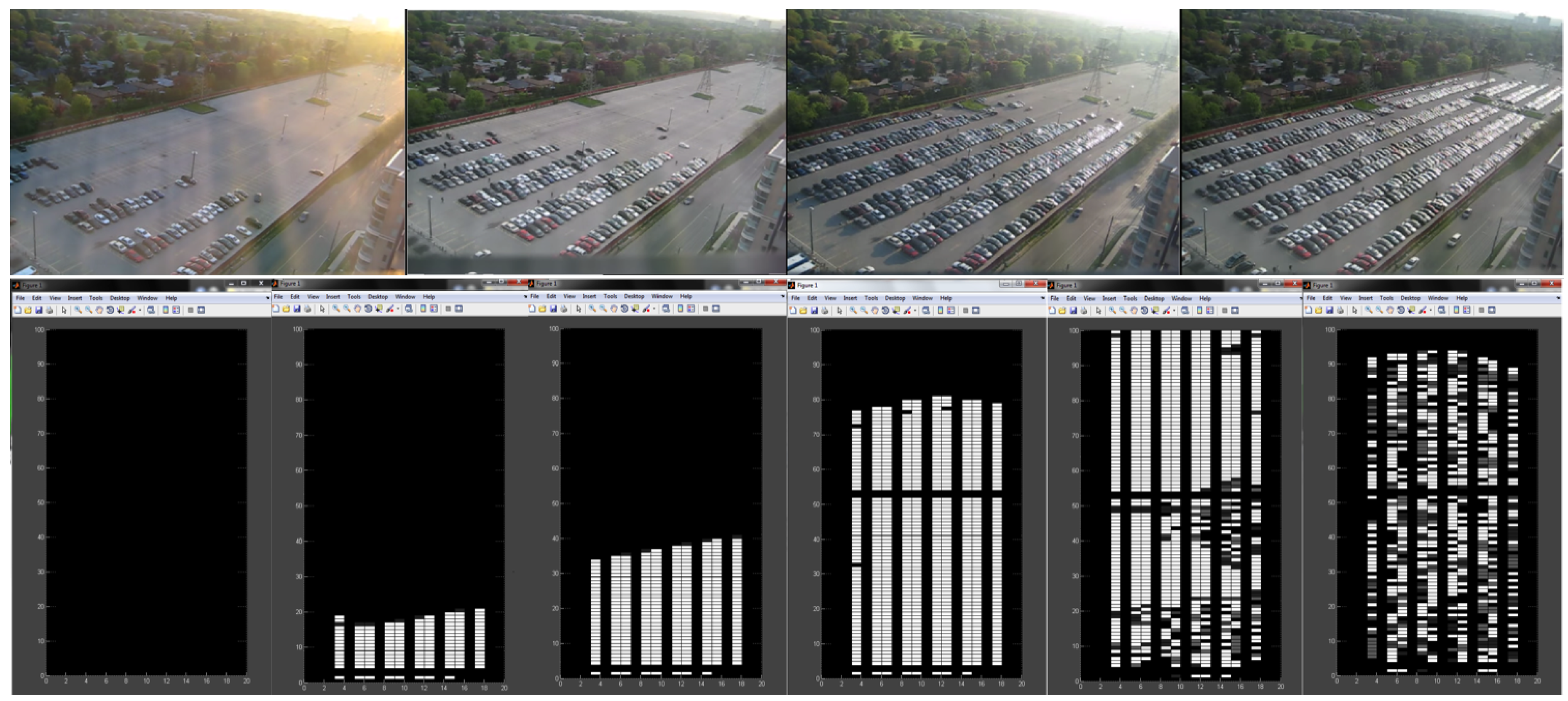
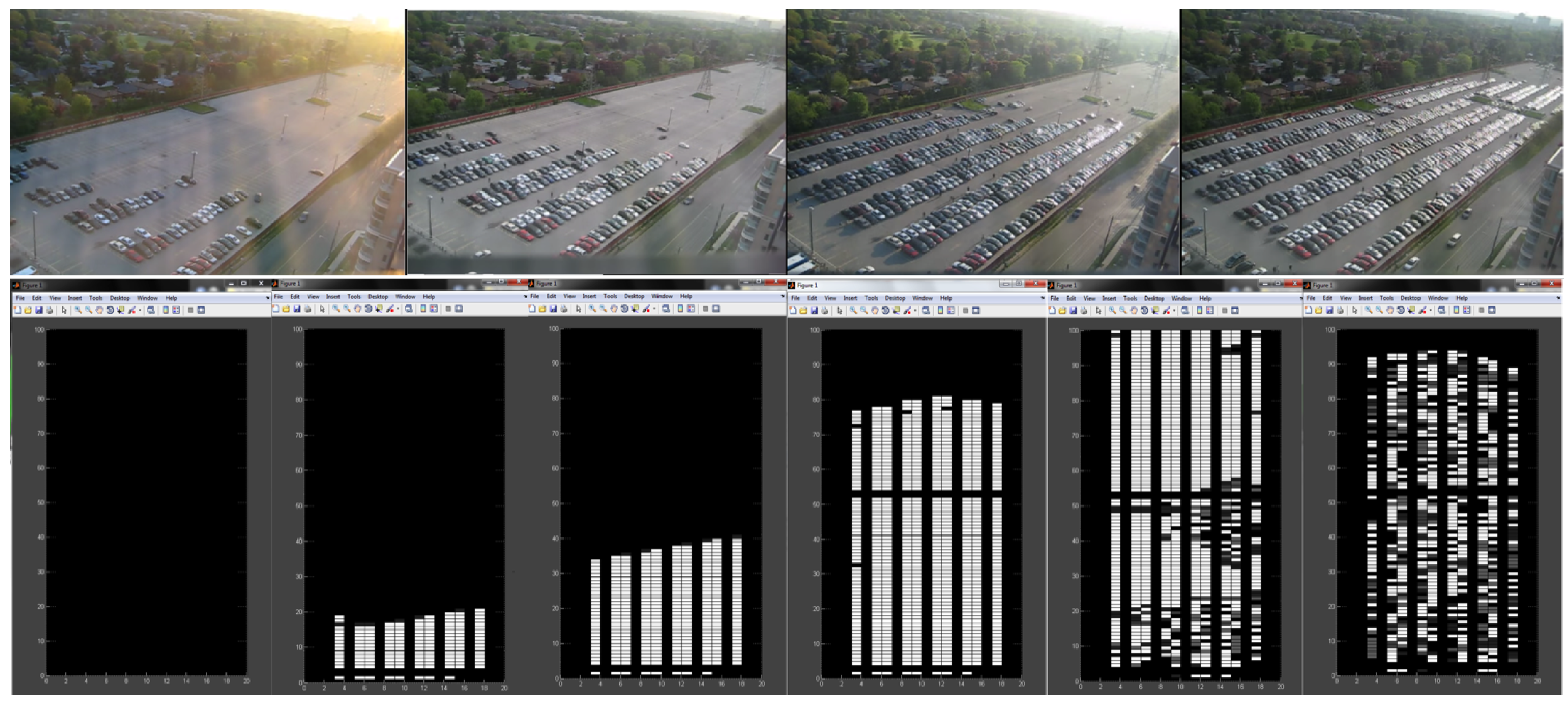
The aforementioned CA-based model has been used to simulate with the Matlab program (MathWorks, Natick, MA, USA) the behaviour of drivers in indoor parking facilities. On the one hand, the input to this simulation is provided by the data sent through the proposed smartphone application from vehicles in the parking facility. On the other hand, the output of the simulation is used to predict availability and occupancy of parking spaces. Due to the existence of general limitations of simulations used for prediction, it is worthwhile to mention that any model is only as good as its assumptions. Thus, the choice of assumptions for the CA-based simulation is considered essential in this proposal. In order to simulate the behaviour of vehicles and parking occupancy in indoor parking facilities, we have used the location of the exits as initial seed for the CA-based model, assuming that these points are the key to the behaviour pattern.
The actual situation seen in the first images of
Figure 7 has been recreated using Matlab, as shown at the bottom of the image of
Figure 7, where each cell corresponds to a parking space. With this simulation of the proposed CA-based model, available parking spaces can be forecasted, especially during the Filling stage.
Thus,
Figure 7 shows a simulation of driver behaviour in the scenario of a parking facility with one POE, once an adequate CA initial state has been chosen that takes into account where the POE is. As can be seen, the simulation grows in a similar way to the real scenario shown in
Figure 7.
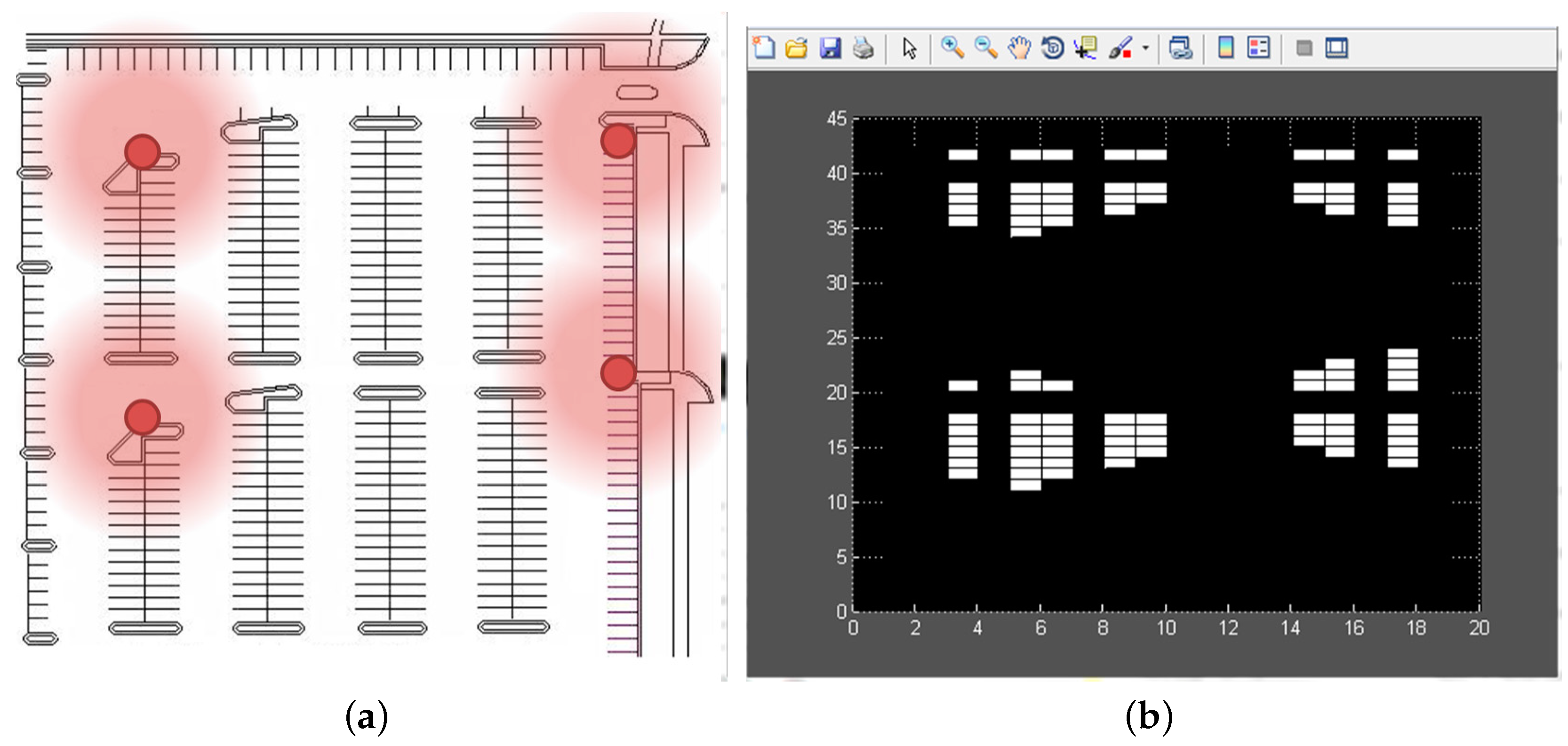
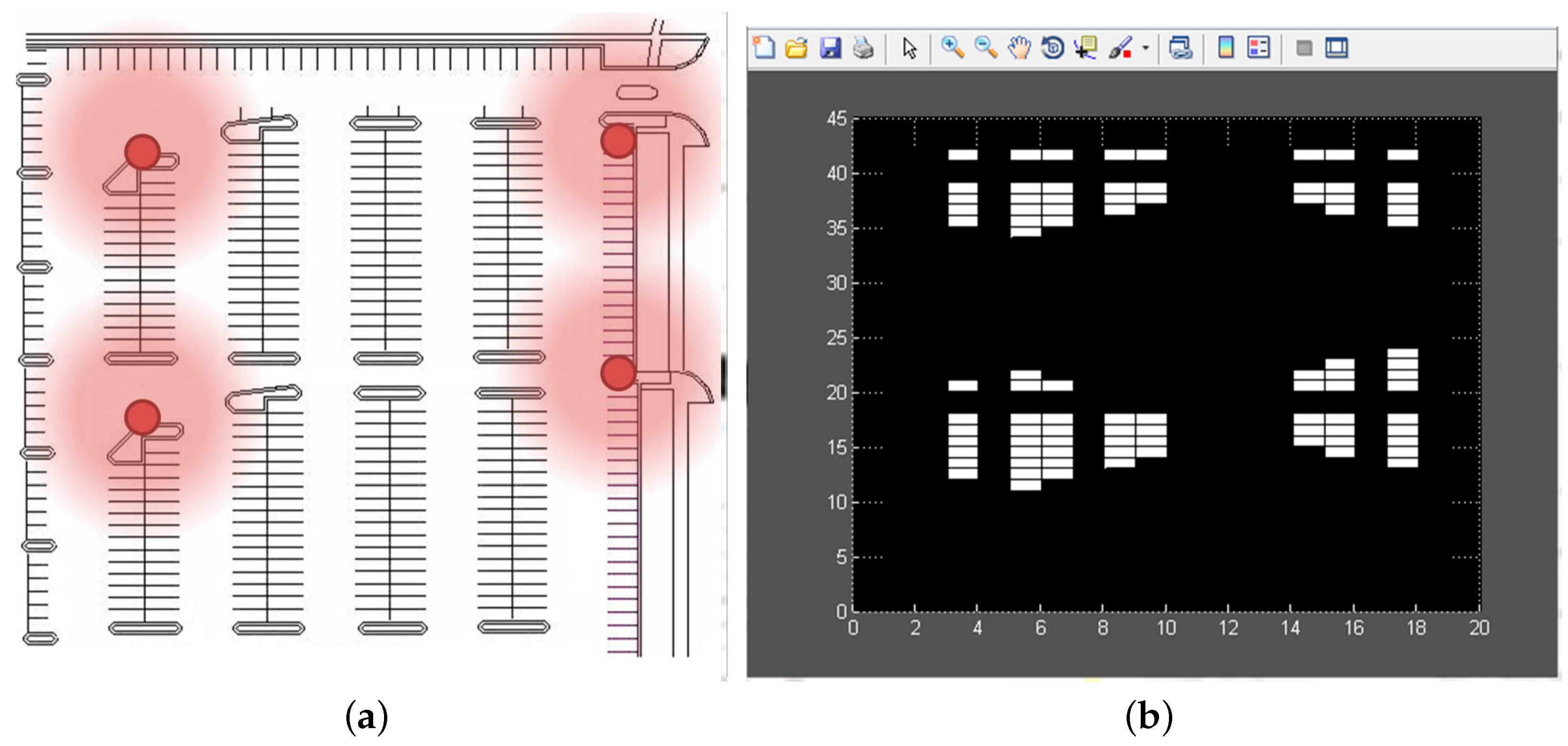
The proposed tool allows modelling different parking spaces with different topologies, including parking facilities with more or fewer rows or columns of parking spaces, POEs, lanes, sections, etc. For instance, the map on the left in
Figure 8 shows a parking facility with four POEs, and, as can be seen, once an adequate CA initial state has been chosen taking into account where the POEs are, the model reflects that users tend to park near the four access points.
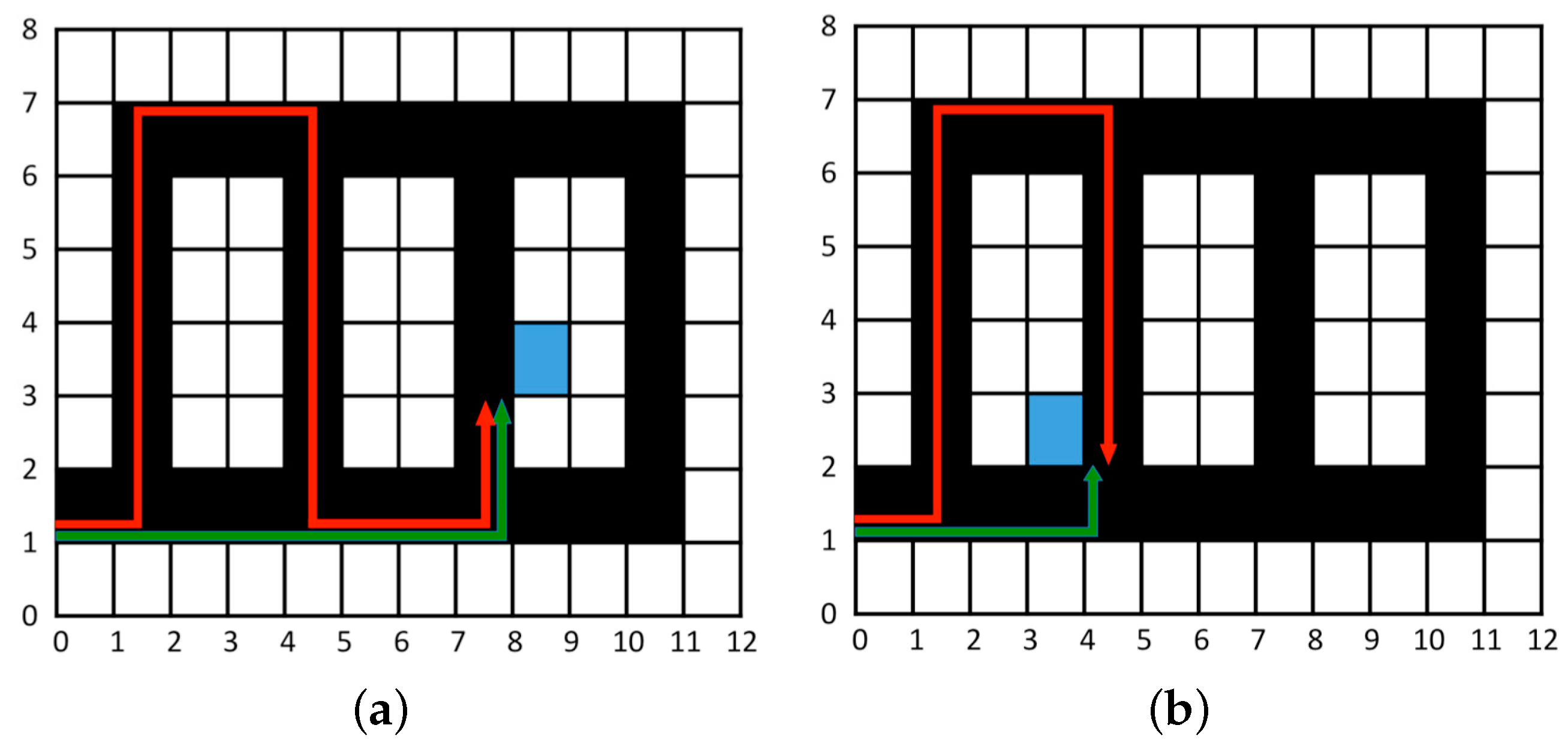
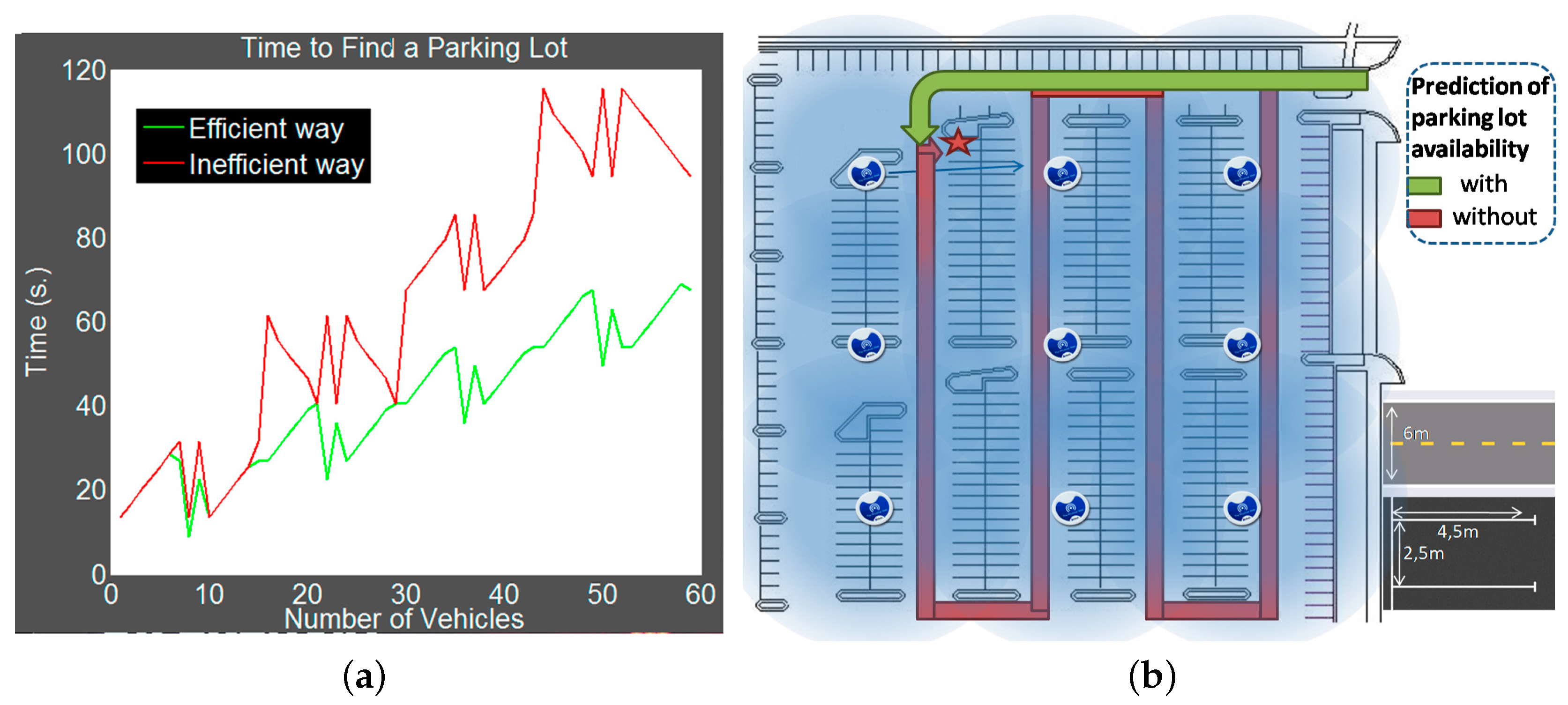
Regarding the influence of knowledge on the optimization of the route to find an available parking space,
Figure 9 shows through a simple example the difference between an efficient and an inefficient route from the parking entrance to an available space. If we identify each parking space by the coordinates of the one of its four vertices that is accessible and closer to the parking entrance, the available space indicated in
Figure 9a is identified by the coordinates
. In this example, it is assumed that the inefficient route consists in going wandering inside the parking facility, crossing completely each section till finding an available space. Thus, according to this model, there are some parking spaces, such as those identified by the coordinates
,
,
,
,
and
, which cannot be visited through the inefficient route. The measurements to define in general the efficiency in terms of traversed distance in both routes,
and
from the entrance located at position
to an available parking space located at position
in the parking facility organized into columns shown in
Figure 9, are given by the following expressions:
where
: Size of each row.
: Size of each column.
: Size of each section by columns.
d: Distance between the neighbouring columns.
As aforementioned, these expressions are obtained assuming that the driver in the efficient case goes directly from the entrance to the closest available parking space located at
, while in the inefficient case, he/she completely traverses each section till he/she reaches the available parking space located at
. In the example of
Figure 9,
,
,
and
. There we can see that the difference between the efficient and the inefficient routes depends on whether the number of full sections traversed by the inefficient route is even or odd. Thus, on the one hand, for the instance of the space
shown in
Figure 9a,
, so the difference between both routes is 12, which corresponds exactly with the distance for traversing two full sections. On the other hand, for the instance of the space
shown in
Figure 9b,
, so the difference between both routes is
, which corresponds to the distance of traversing less than two sections.
This simple example shows a typical behaviour pattern because, in general, users try to park as close as they can to a POE. Thus, if they do not know where the best available parking space is, they search through all the parking facilities. Otherwise, if users know where a possibly available space is, they go directly to it, saving time and fuel and increasing their comfort.
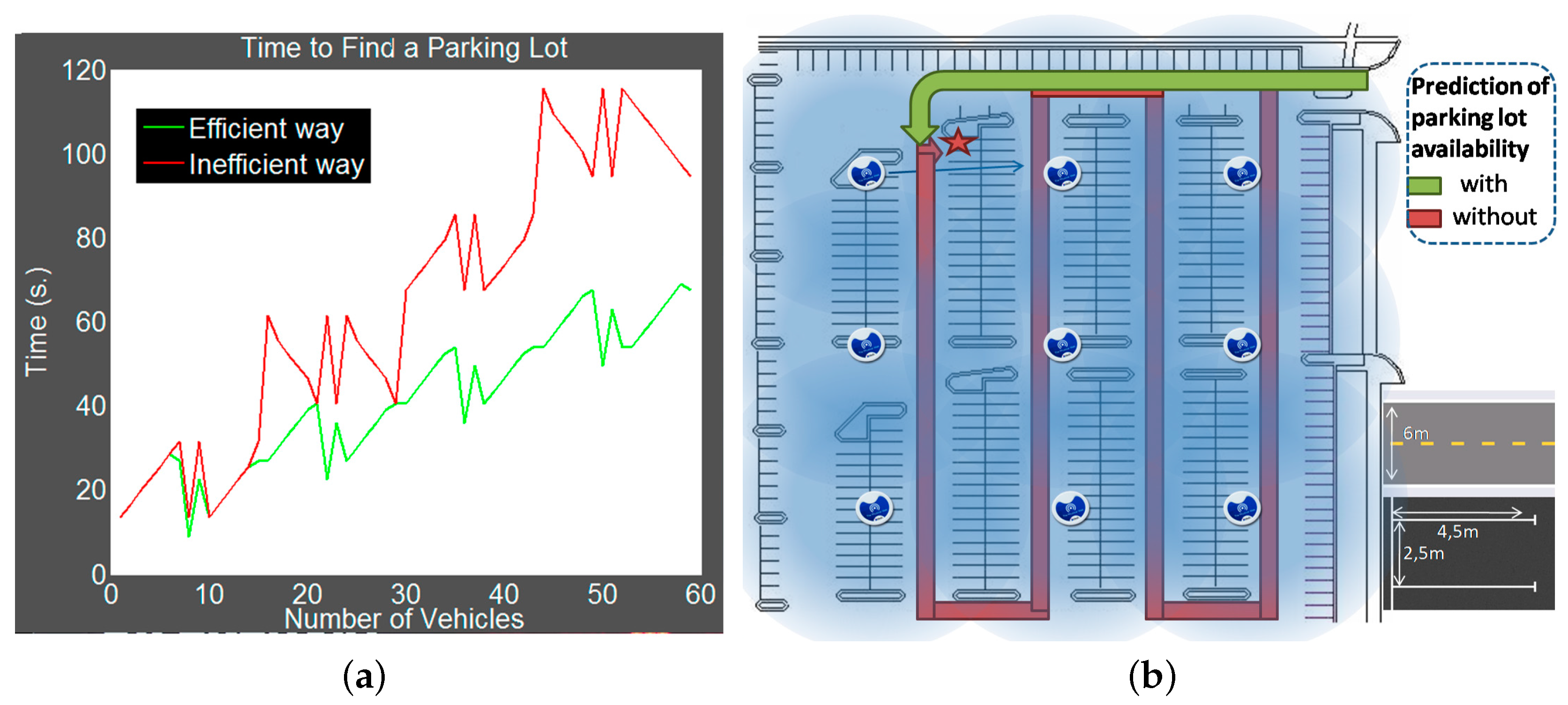
Thus, in the case of the parking facility to the right of
Figure 10, the image on the left shows the difference between the distances that a user has to traverse to find an available parking space depending on the information he/she knows. The method indicated as an efficient way corresponds to drivers who use the proposed application, while the time corresponding to the rest of the vehicles there is indicated with the inefficient way tag. This figure also shows the relationship between the number of vehicles and the search time, reflecting that, in both cases, the larger the number of vehicles, the longer the search time. As can be seen, users who have additional information go directly, while users without such information go wandering inside the parking facility until they find a preferred available parking space. Consequently, since, in this second case, a high number of vehicles could provoke a traffic jam inside the facility, the more vehicles there are in the parking facility, the greater the difference is between the times to park in both cases. These results demonstrate the improvement provided by the proposal, even in a very simple parking scenario like that one.
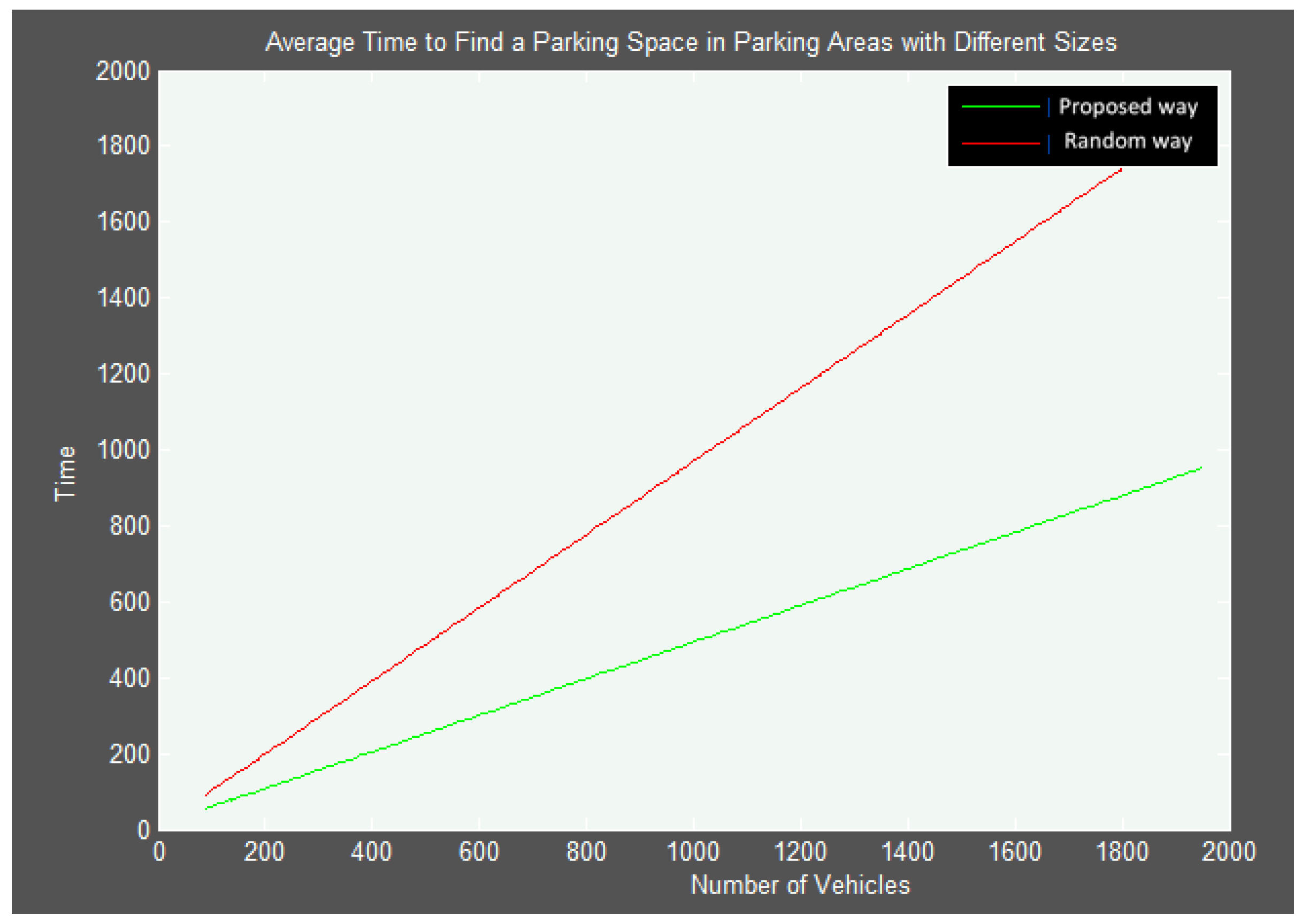
A wider analysis has been done through simulations using the CA-based algorithm and a beta mobile application in indoor smart parking environments, where Matlab was used with more than 100 simulations in several scenarios in parking facilities ranging from 50 to 2000 parking spaces and from one to 10 POEs.
Figure 11 shows the average time to find an available parking space considering a number of vehicles between 0 and 2000, and all the cases from 0 to 100% occupancy. As can be seen, the growth of the average time with respect to the number of vehicles, represented by the slope of the straight line in
Figure 11, is lower for the proposal than in the absence of an optimized scheme. In addition, it can be seen that the searching time increases as the number of parking spaces increases due to the fact that more congestion is provoked near the POEs. This clearly indicates the advantage of using the proposal especially in large parking facilities with a high flow of vehicles, which is just where more parking problems appear.
The above results have been used for a comparative study between this work and a prior proposal. In particular, the scheme chosen for the comparison is PARC (Parking Access and Revenue Control), a system that helps to reduce searching times in parking facilities and whose methods can be found in [
46].
Figure 12 shows average searching times to find an available parking space using different schemes. In order to compare the time to find an available parking space, the used parking model is the same as the one used in the paper [
46], where a parking facility with 152 parking spaces is considered, with parking spaces on the right, on the left and in two rows in the middle. This distribution has been implemented in Matlab to calculate the performance time of the proposed system.
It can be observed that the average performance of the system proposed here is equal to that of the PARC system with 90% occupancy, and better than that of the PARC system on average. The reason why the proposed system is better than the PARC system when the rate of occupancy is lower than 90% could be due to the fact that PARC uses sensors at key locations to divide the parking area into smaller zones in order to calculate the parking occupancy in such zones, which results in a loss of information. Furthermore, in contrast with the PARC system, with the proposed system, it is not necessary to install either VMS (Variable Message Sign) panels or sensors in the parking facility.
The performed evaluation has been carried out over parking facilities with just one floor, but many parking facilities have several levels. In order to handle such multi-storey parking facilities, the proposed method could be modified by considering that, in the same way that happens with the distances from the POEs, parking levels are not equally favoured by users due to the difference of distances from the level/s of the entrance/s. Thus, the proposal here presented can be modified by replicating the CA-based model at each level depending on its POEs, and changing the driver-assistance system so that it computes the recommendations by assigning lower probabilities to those levels that are more distant from the level/s of the entrance/s.
The conclusion of the above analysis is that the proposed parking service based on both forecast and availability of information from users’ smartphones improves the user experience of customers through the parking recommendation and the reminder of the location of their parked vehicles. In addition, it is also demonstrated that the system is energy-saving because the route of each vehicle to find a preferred available parking space is shorter.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}