
A Harmonized Perspective on Transportation Management in Smart Cities: The Novel IoT-Driven Environment for Road Traffic Modeling


 ,
, 

Abstract
:1. Introduction
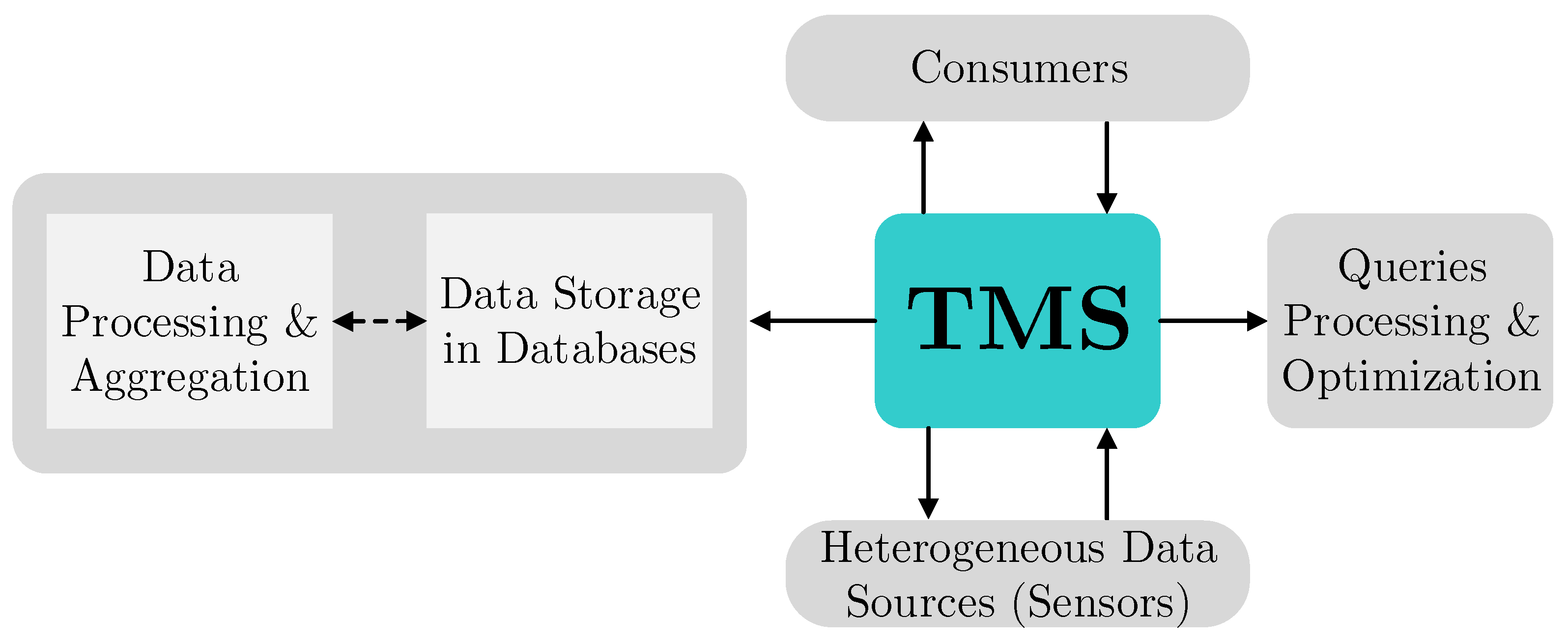
2. Reviewing Road Traffic Management Systems
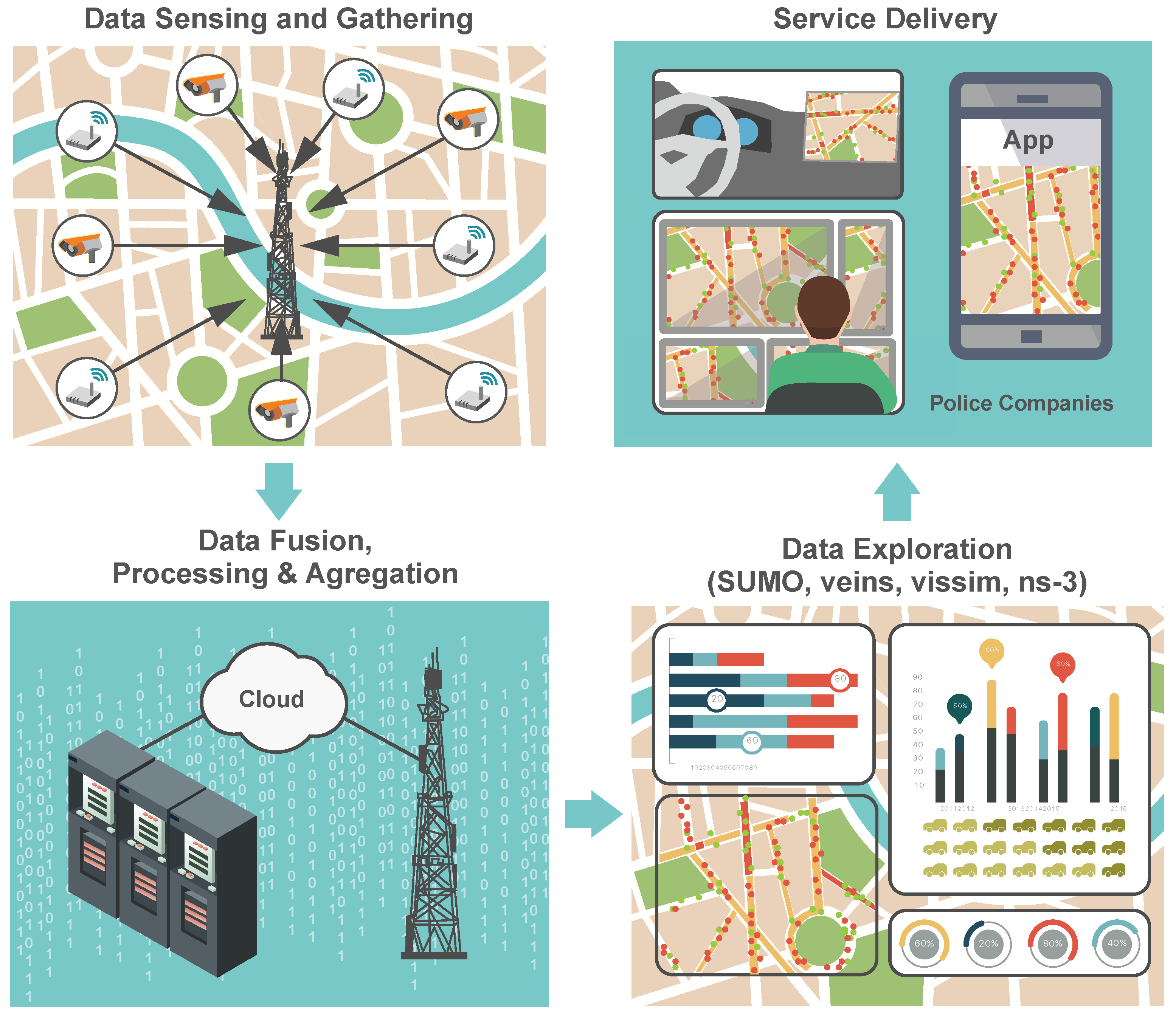
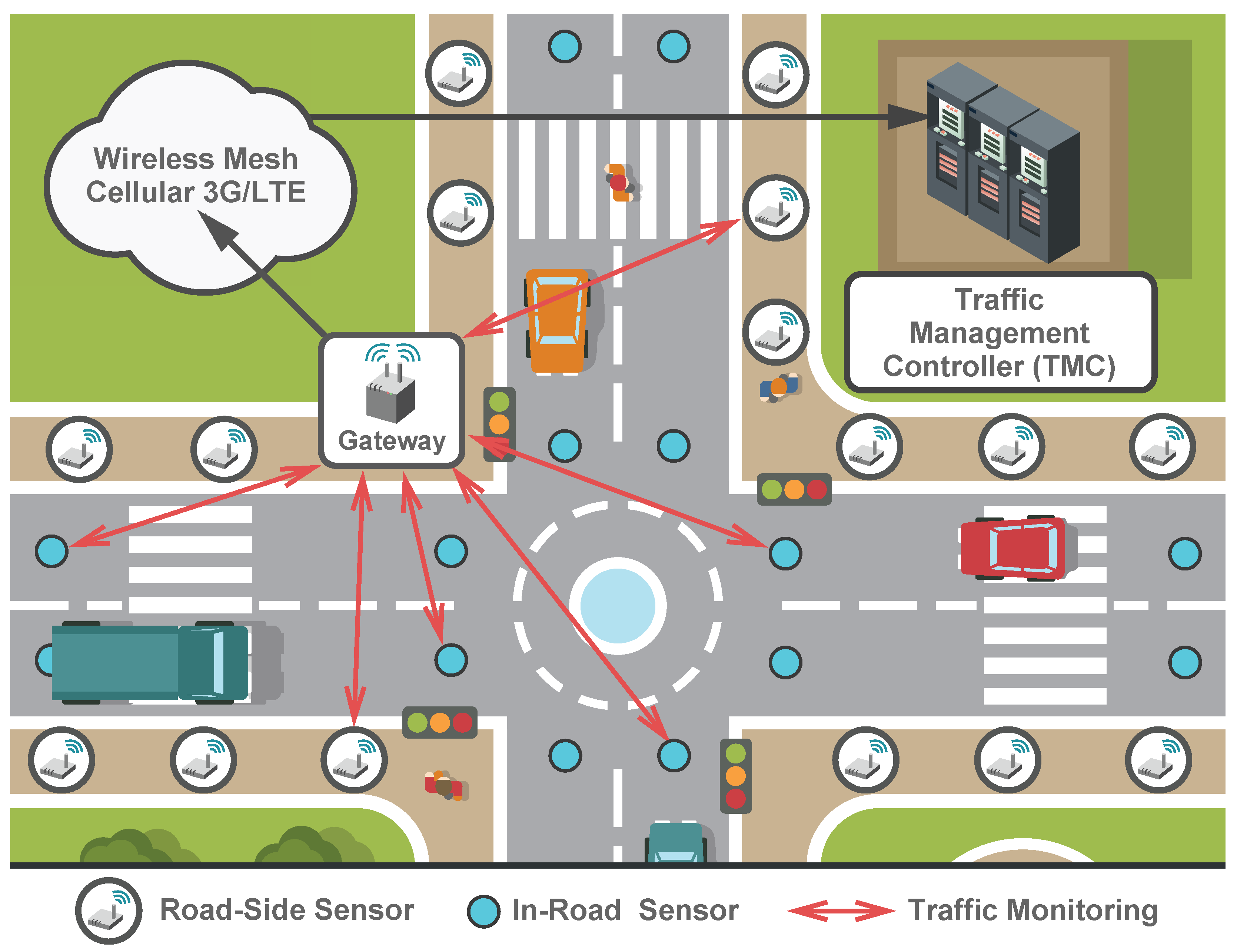
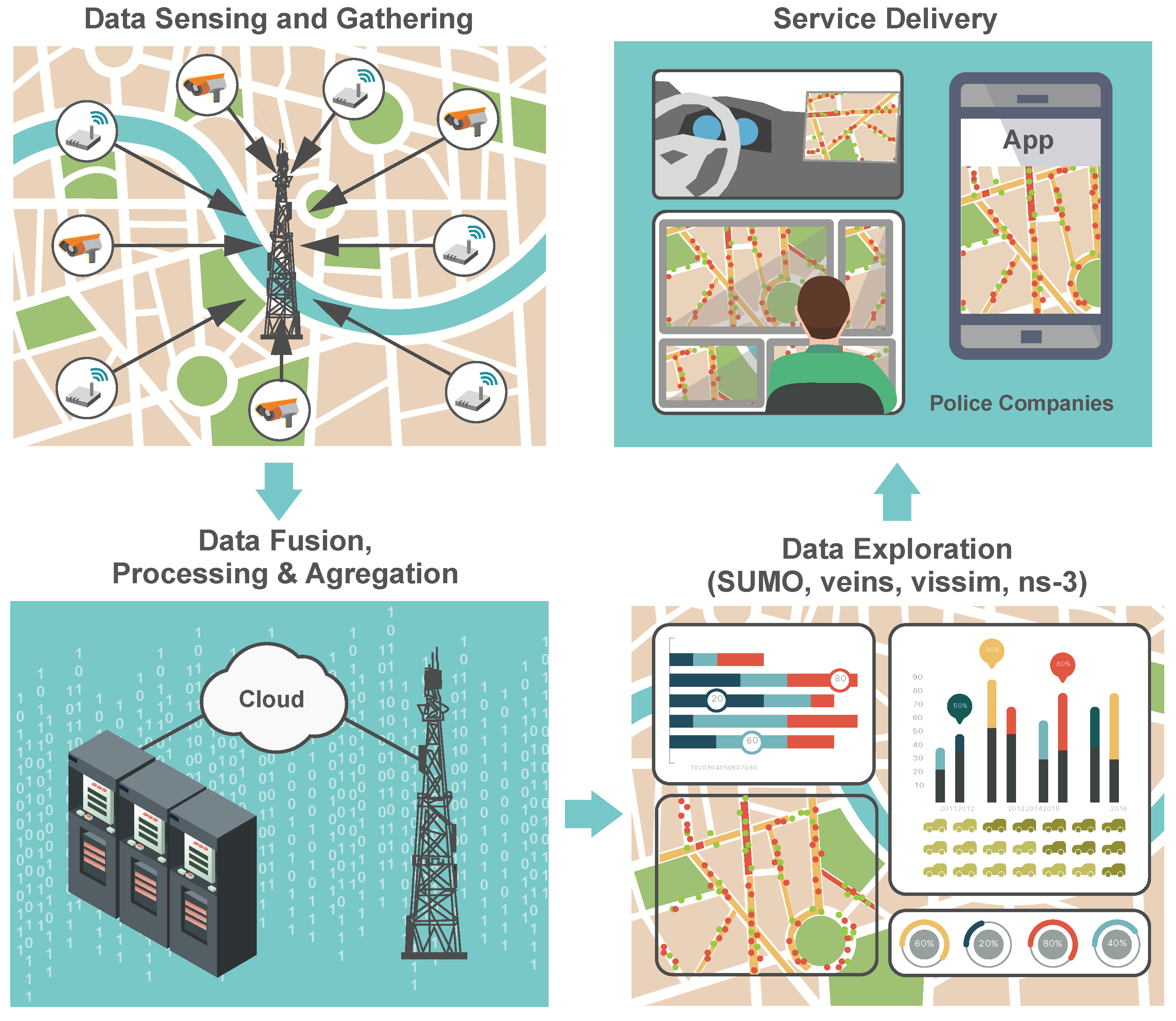
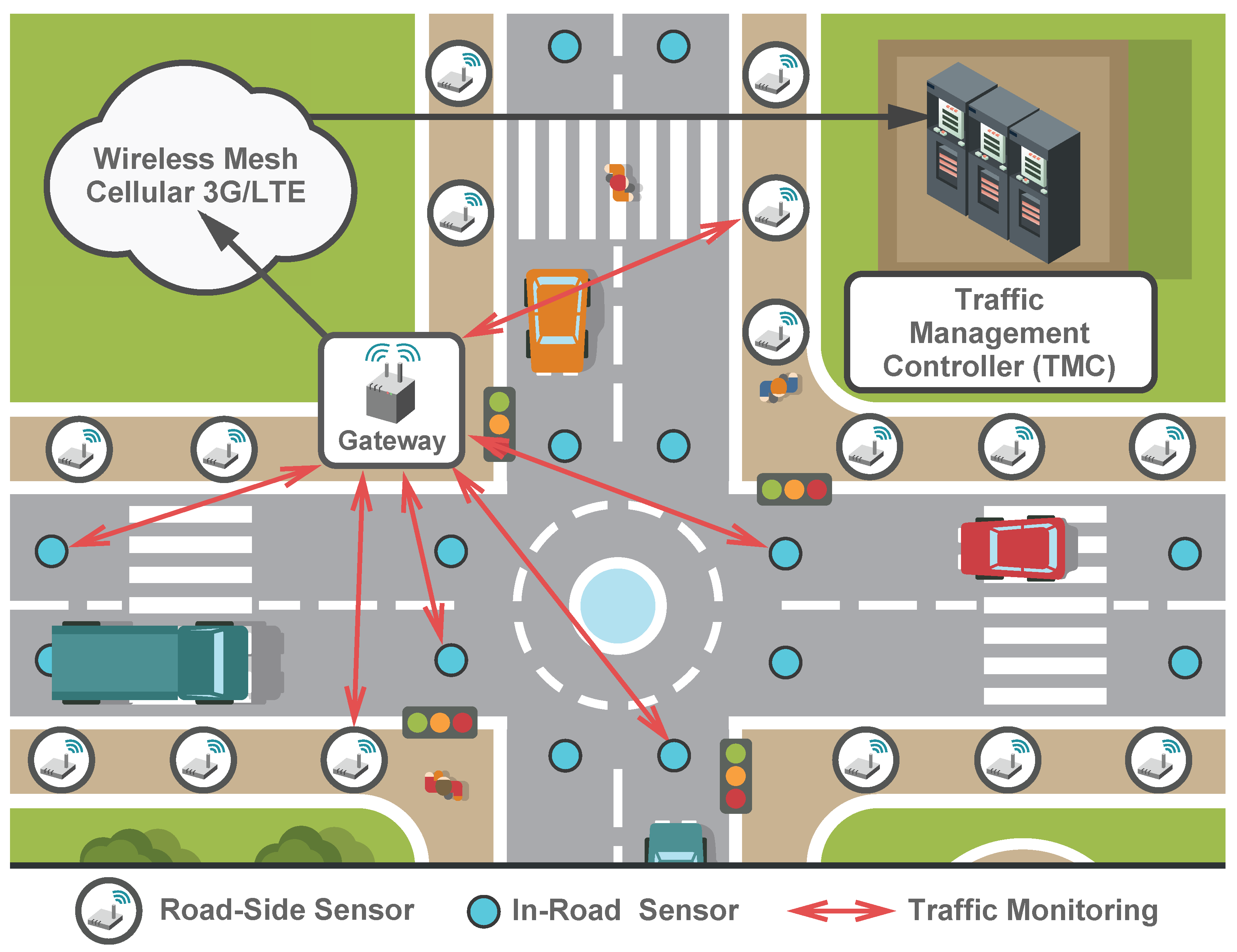
3. Traffic Data Sensing and Gathering
3.1. Wireless Sensor Networks
3.2. Machine-to-Machine Communications
3.3. Mobile Sensing
3.4. Social Media Feeds
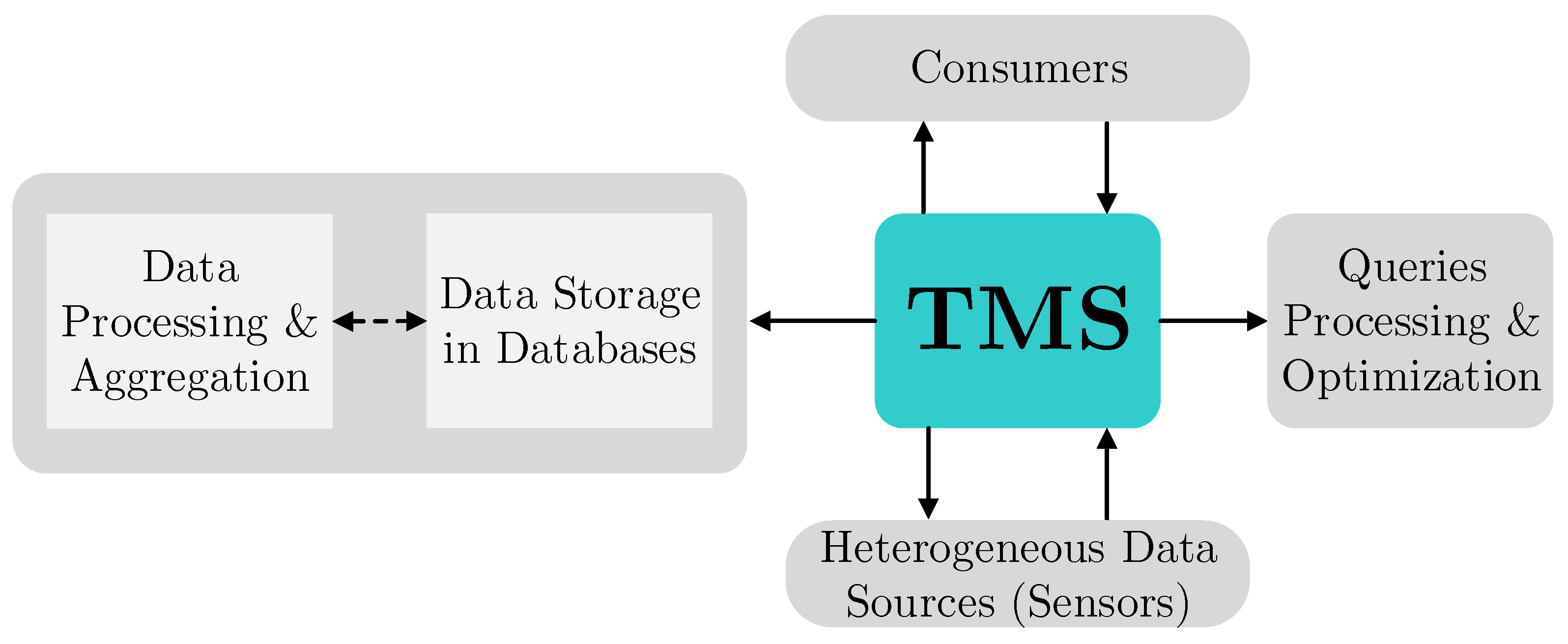
4. Proposed Model Description
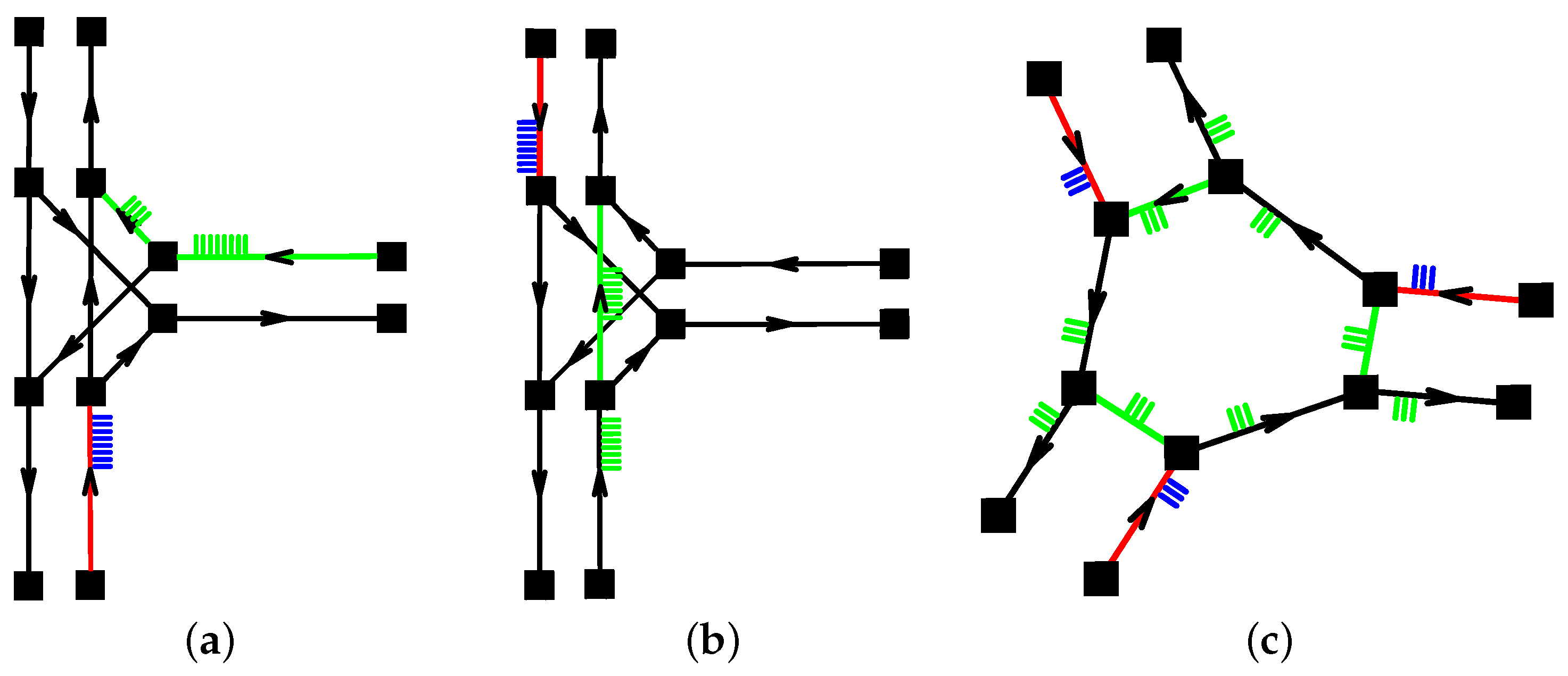
4.1. Basic Components of the Model
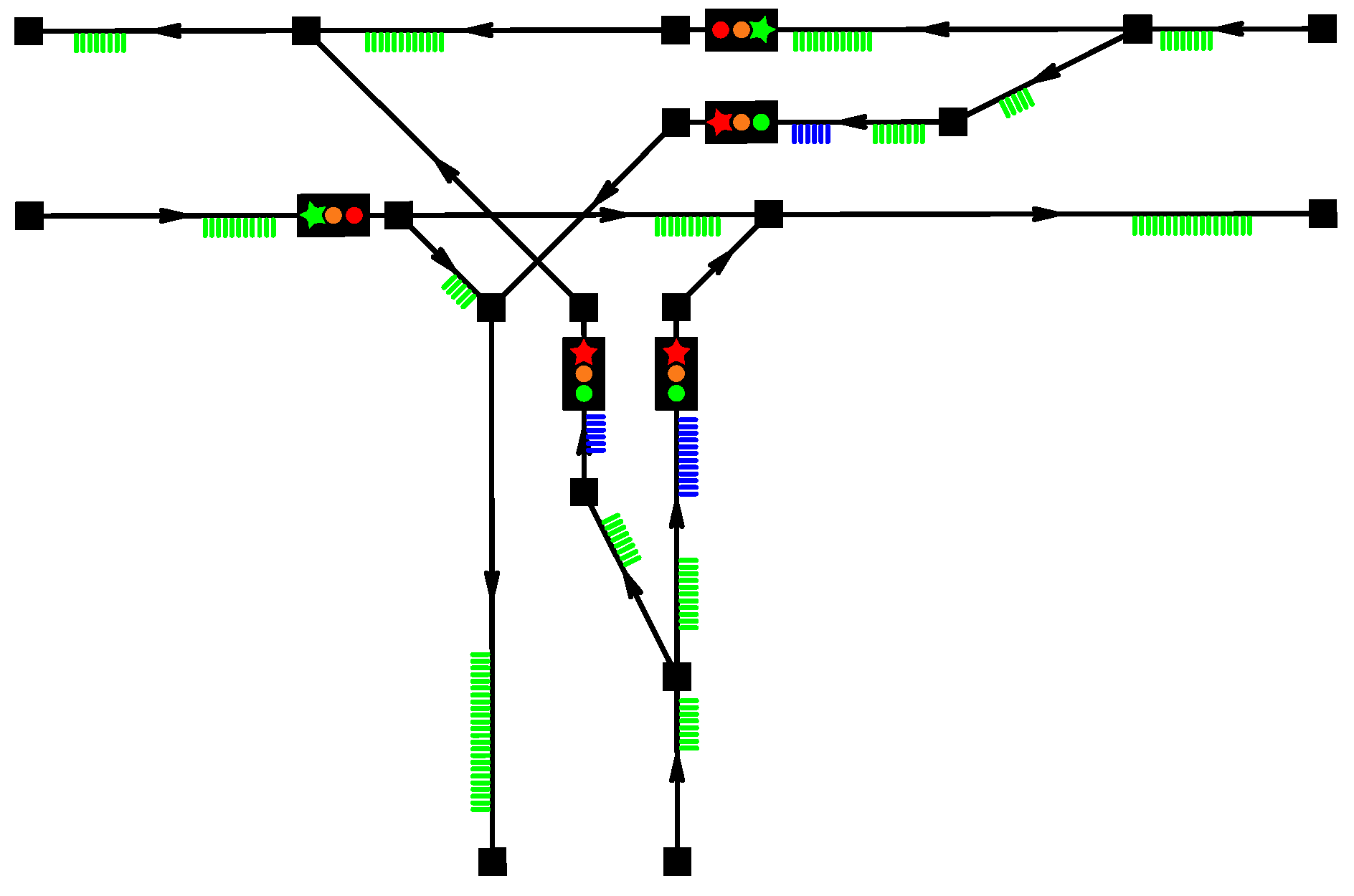
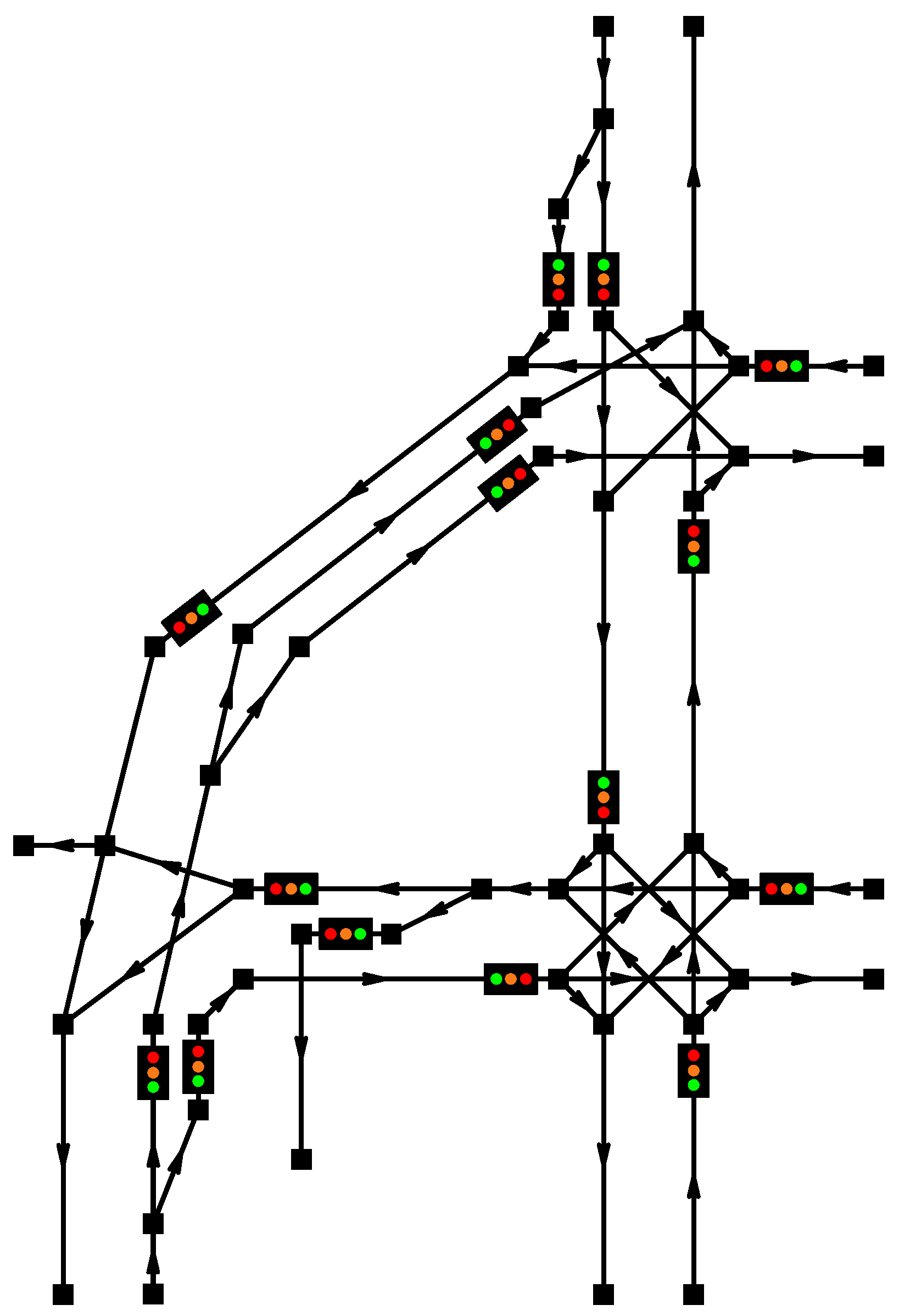
4.2. Traffic Signals and Their Synchronizations
4.3. Priority Conditions
4.4. Characterizing a Congestion
4.5. Traffic Generation and Routing
4.6. Target Problem and Objective Function
4.7. Solution Process
4.8. Optimization Process
| Algorithm 1 Optimization via a genetic algorithm (GA) |
| Input: Nodes, Lanes, Signals |
| /* Model creation */ |
| Assignment of Nodes to Lanes |
| Assignment of Signals to selected Lanes |
| Merging selected Signals into SignalBunches |
| Merging selected SignalBunches into BunchLists |
| /* Routing and car generation */ |
| Parameters of traffic flows (enterLanes, exitLanes, intensities) |
| Generating traffic flows (parameters, duration) |
| /* GA optimization */ |
| for gen = 0; gen < maxGenerations; gen ++ do |
| for genome = 0; genome < popSize; genome ++ do |
| Load genomes specific signalBunches; Synchronize BunchLists |
| Load traffic |
| Simulate traffic model |
| Calculate objectiveFunction value |
| Clear traffic |
| end for |
| Sort population |
| TournamentSelection (ts ratio) |
| Reproduce population (mutate ratio) |
| end for |
| Output: Genome with the best performance (signal parameters) from the last generation. |
5. Experimental Results
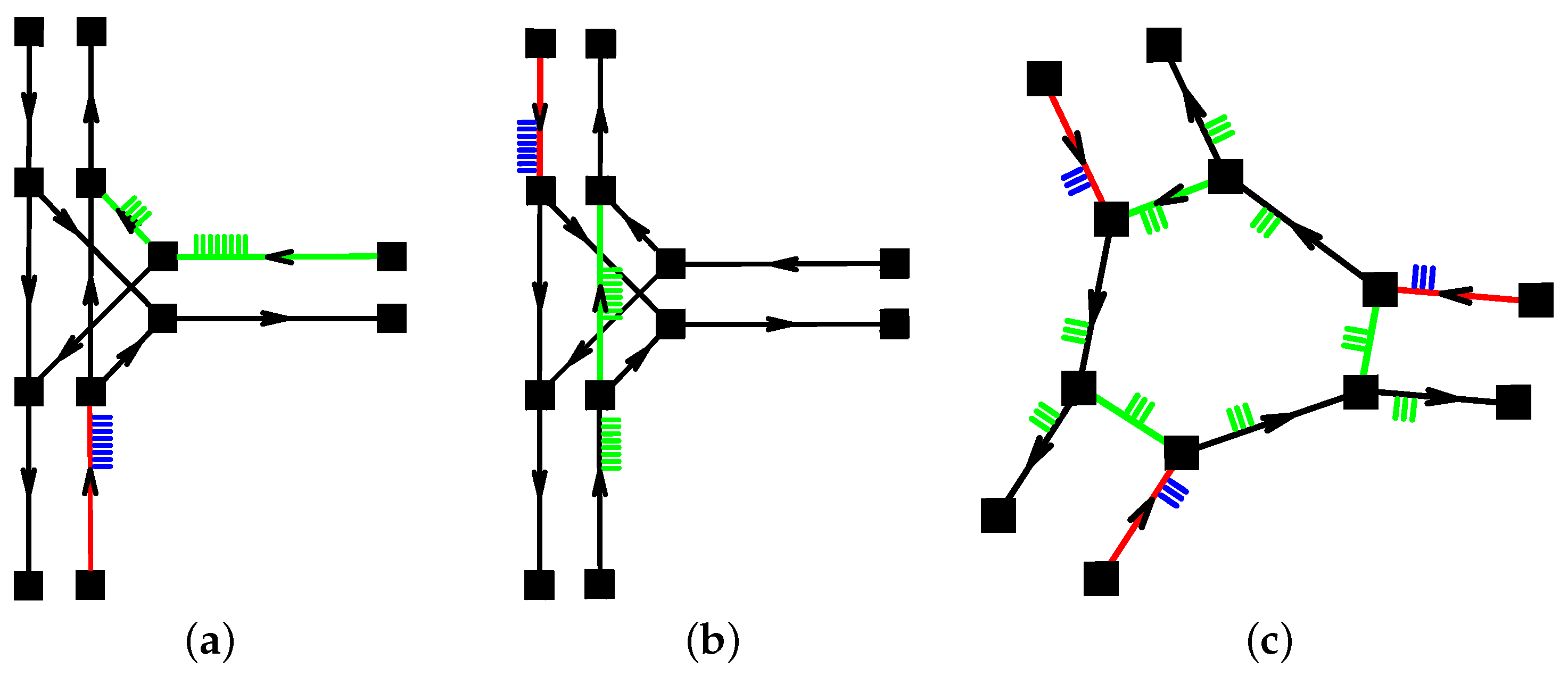
5.1. Classical T-Shaped Junction Scenario
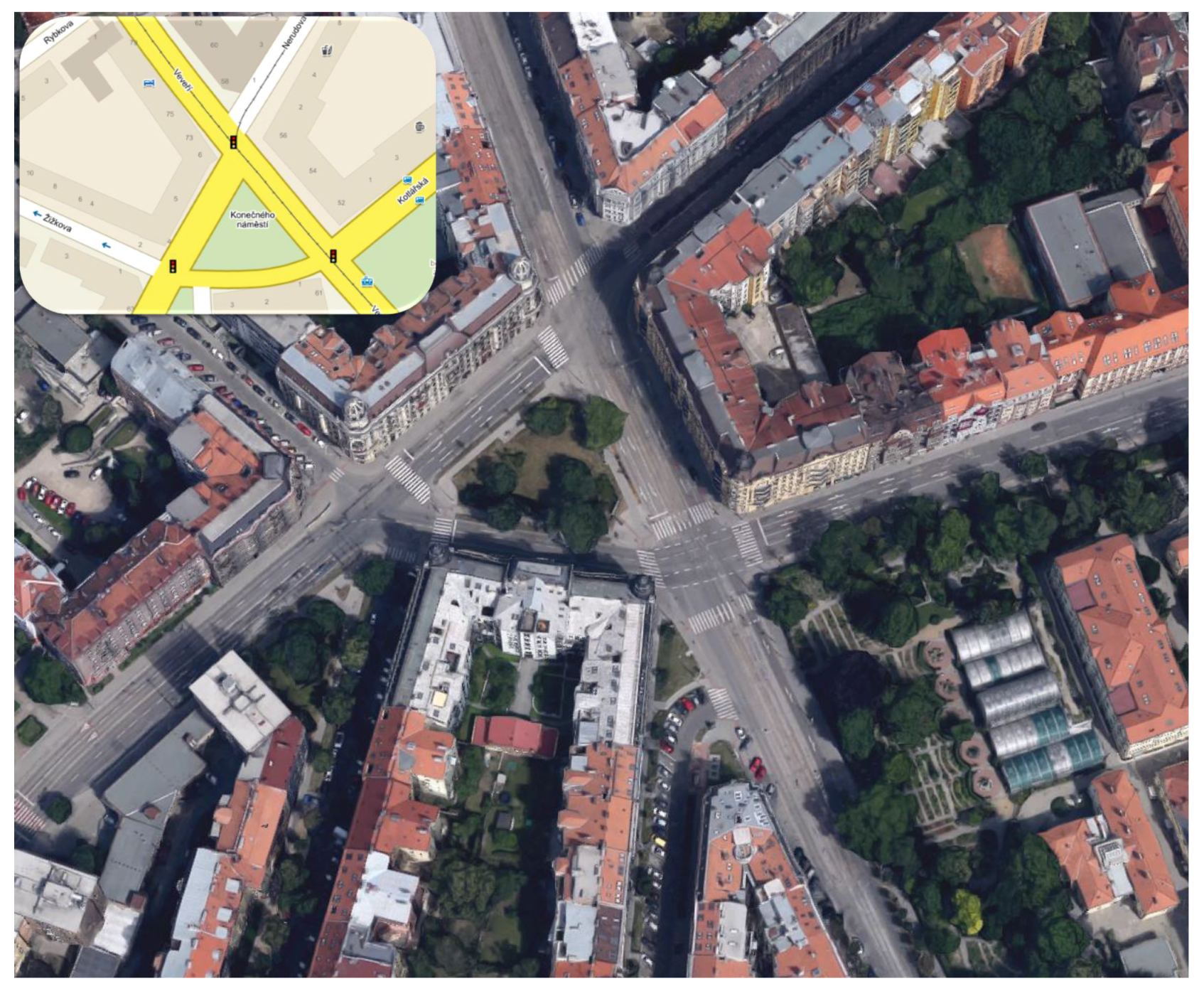
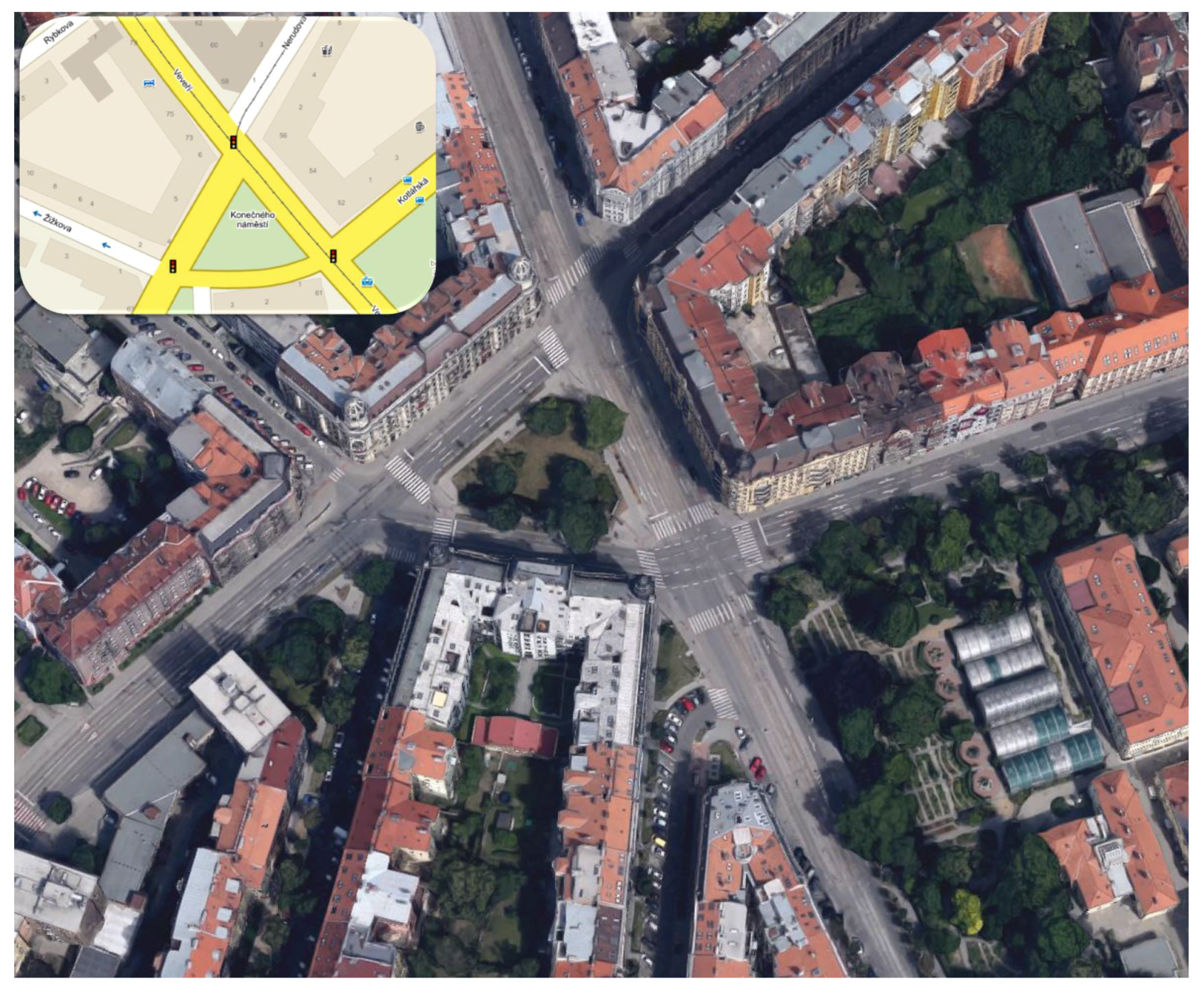
5.2. Real-Life Scenario
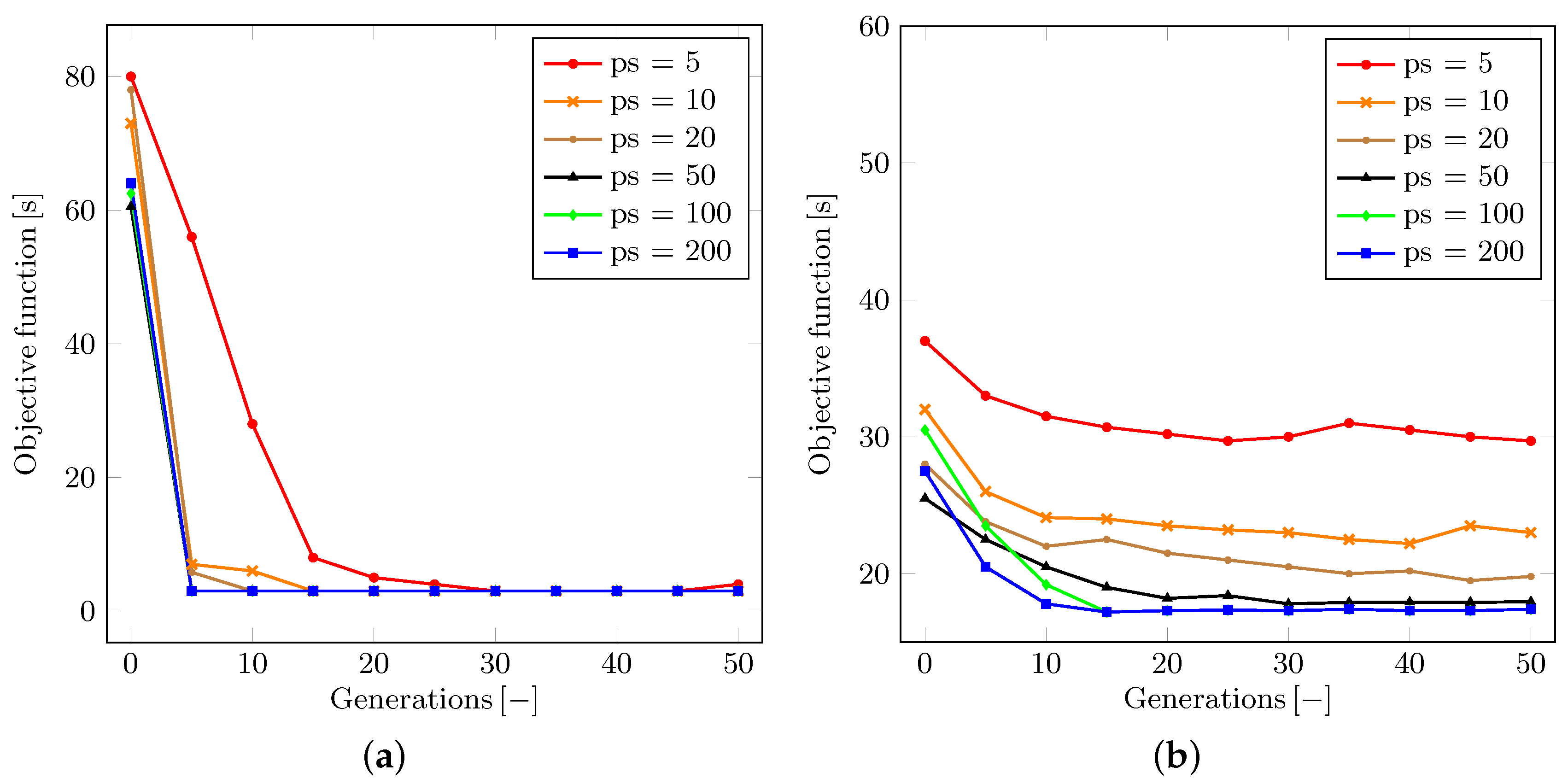
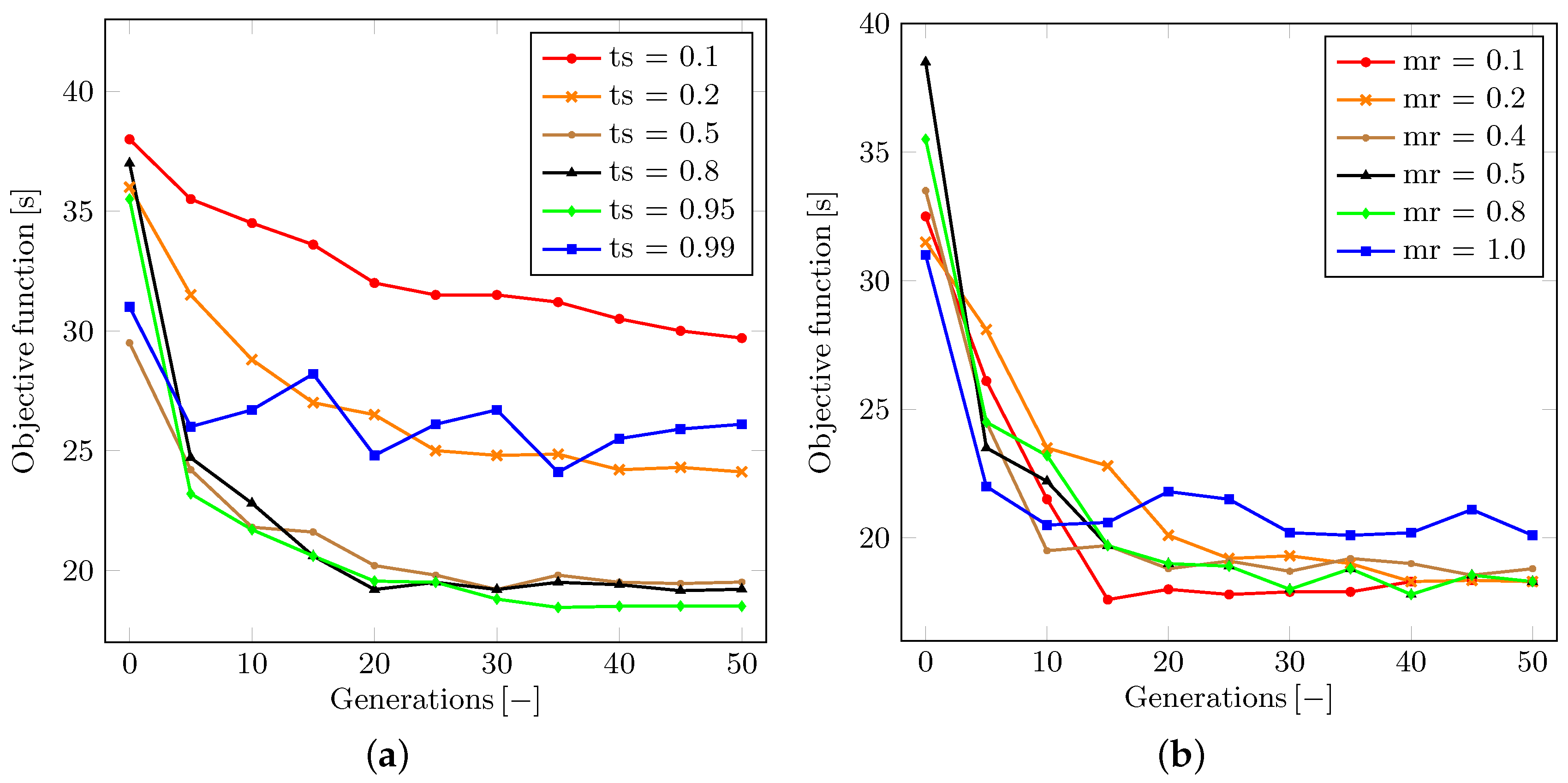
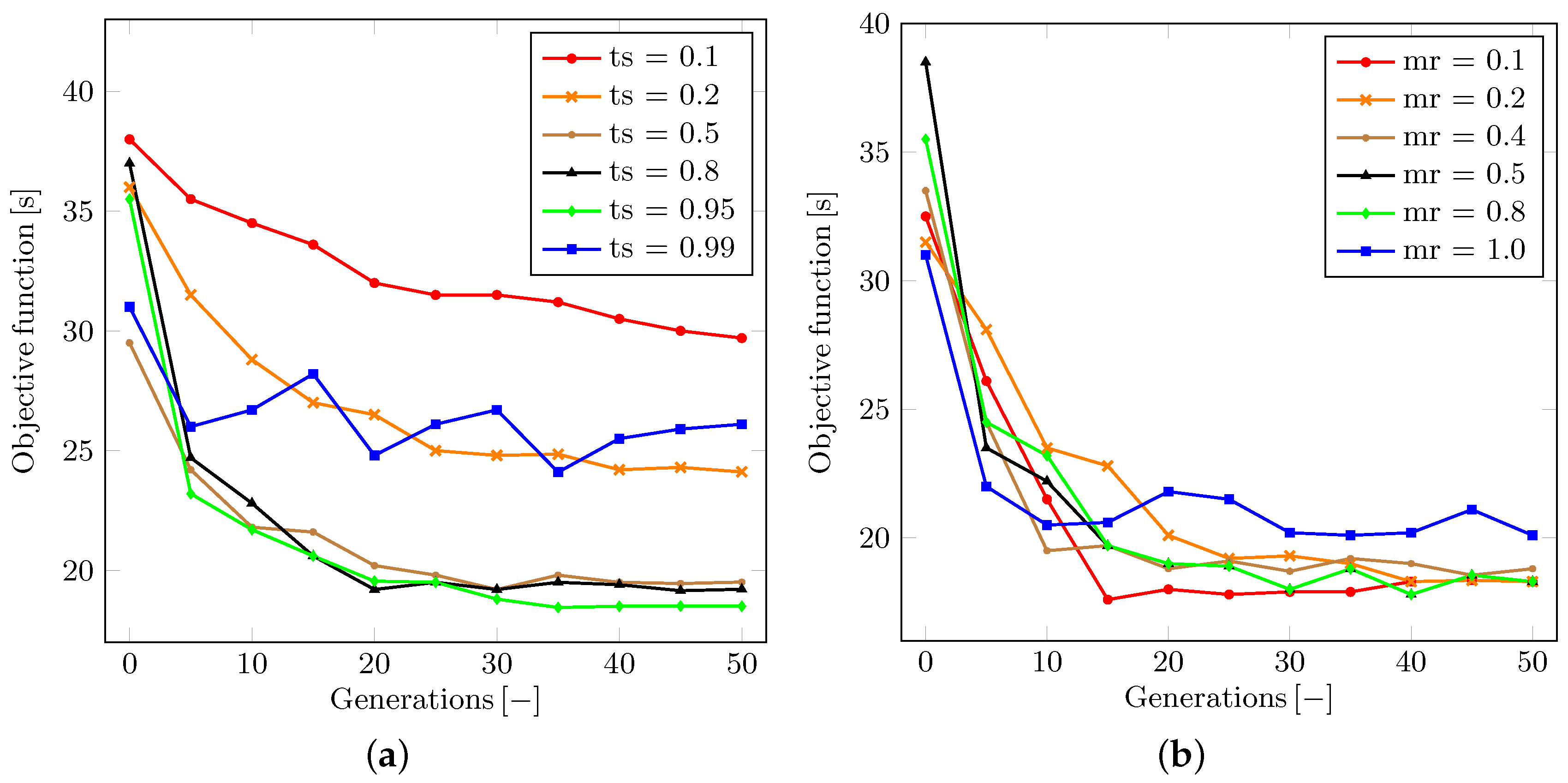
5.3. Stability and Convergence of the GA Method
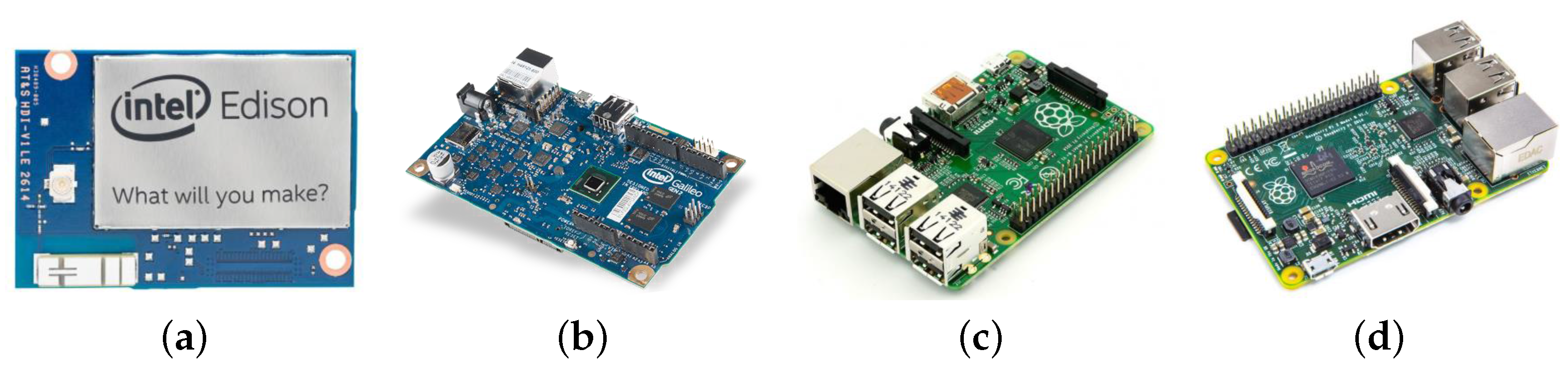
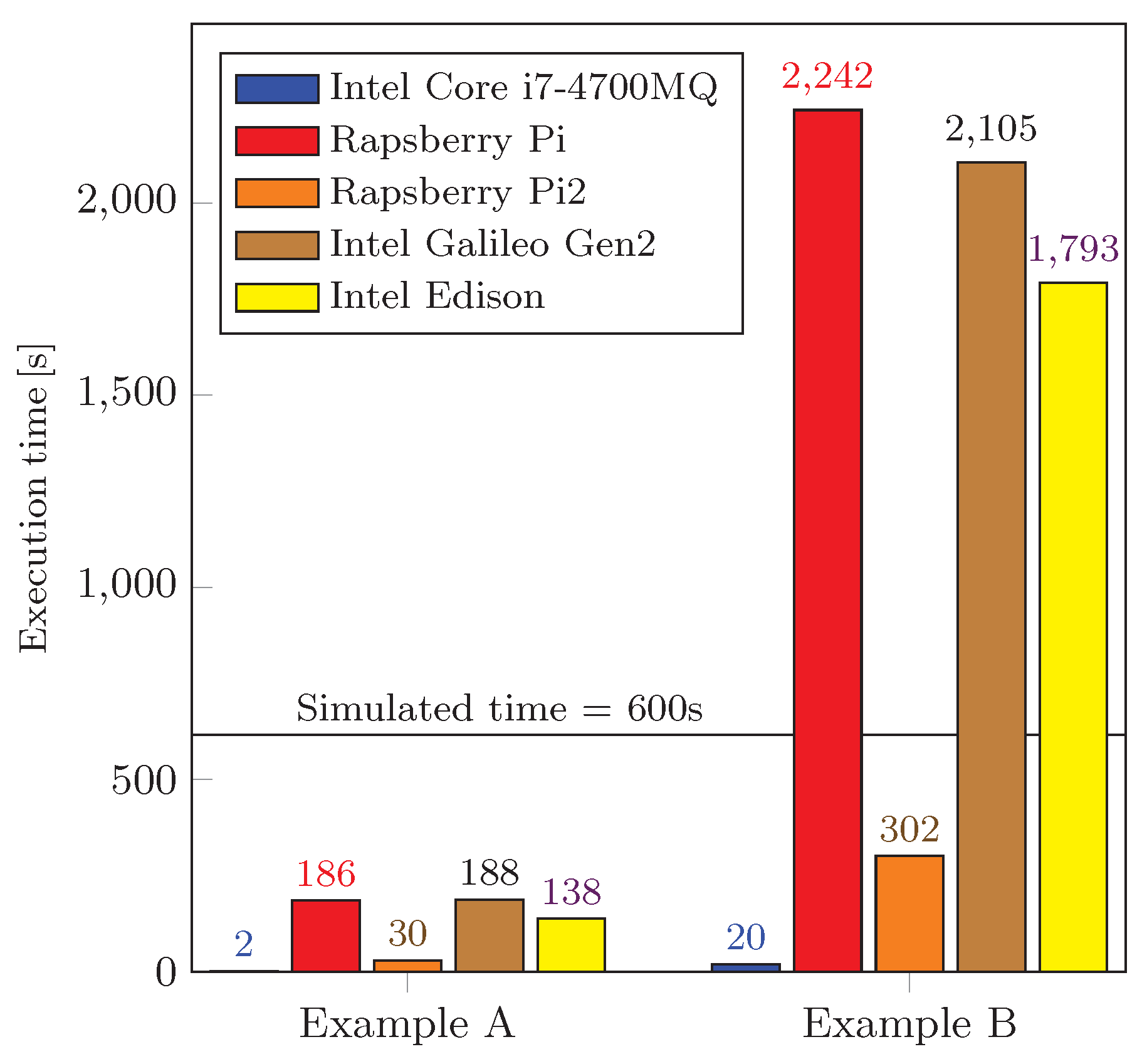
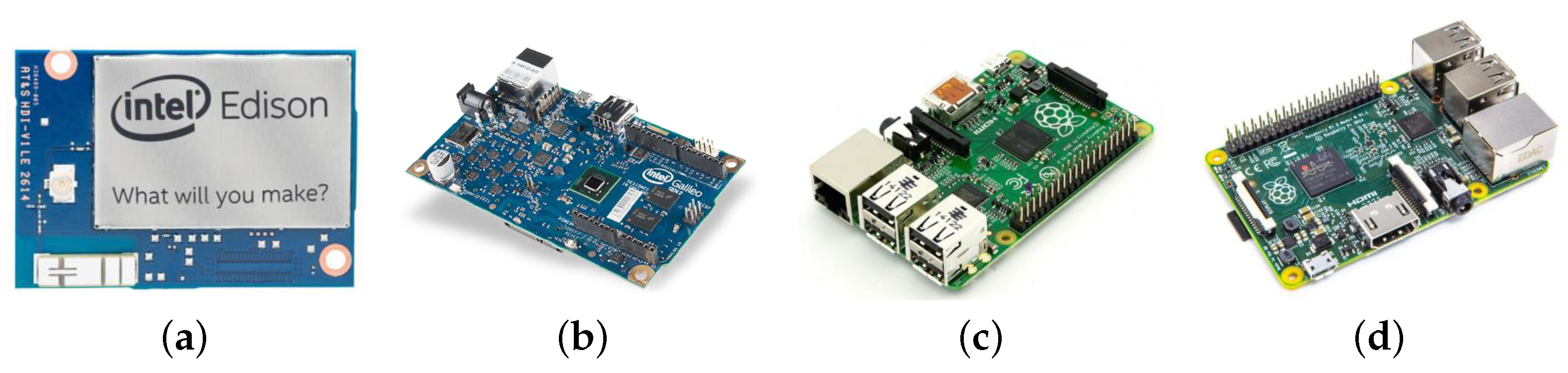
5.4. Performance Evaluation of Employed IoT devices
6. Conclusions and Lessons Learned
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Albino, V.; Berardi, U.; Dangelico, R.M. Smart cities: Definitions, dimensions, performance, and initiatives. J. Urban Technol. 2015, 22, 3–21. [Google Scholar] [CrossRef]
- Brettel, M.; Friederichsen, N.; Keller, M.; Rosenberg, M. How virtualization, decentralization and network building change the manufacturing landscape: An industry 4.0 perspective. Int. J. Mech. Ind. Sci. Eng. 2014, 8, 37–44. [Google Scholar]
- Lee, J.; Kao, H.A.; Yang, S. Service innovation and smart analytics for industry 4.0 and Big Data environment. Procedia CIRP 2014, 16, 3–8. [Google Scholar] [CrossRef]
- European Commission: European Initiative on Smart Cities, 2010–2020. Available online: http://setis.ec.europa.eu/set-plan-implementation/technology-roadmaps/european-initiative-smart-cities (accessed on 20 July 2016).
- European Commission: European Road Safety Observatory, Traffic Safety Basic Facts. Available online: http://ec.europa.eu/transport/road_safety/pdf/statistics/dacota/bfs20xx_dacota-swov-cyclists.pdf (accessed on 20 July 2016).
- Rodrigue, J.P.; Comtois, C.; Slack, B. The Geography of Transport Systems; Routledge: New York, NY, USA, 2013. [Google Scholar]
- European Commission: European Parliamentary Research Service, Urban Mobility: Shifting towards sustainable transport systems. Available online: https://epthinktank.eu/2014/09/02/urban-mobility-shifting-towards-sustainable-transport-systems/ (accessed on 20 July 2016).
- Barth, M.; Boriboonsomsin, K. Real-world carbon dioxide impacts of traffic congestion. Transp. Res. Rec. J. Transp. Res. Board 2008, 163–171. [Google Scholar] [CrossRef]
- Djahel, S.; Doolan, R.; Muntean, G.M.; Murphy, J. A communications-oriented perspective on traffic management systems for smart cities: Challenges and innovative approaches. IEEE Commun. Surv. Tutor. 2015, 17, 125–151. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Olshannikova, E.; Ometov, A.; Koucheryavy, Y.; Olsson, T. Visualizing Big Data with Augmented and Virtual Reality: Challenges and research agenda. J. Big Data 2015, 2, 1–27. [Google Scholar] [CrossRef]
- European Commission: Pathways for transport in the post 2020 process. Available online: http://www.transport2020.org/publications (accessed on 20 July 2016).
- Barba, C.T.; Mateos, M.A.; Soto, P.R.; Mezher, A.M.; Igartua, M.A. Smart city for VANETs using warning messages, traffic statistics and intelligent traffic lights. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Alcalá de Henares, Spain, 3–7 June 2012; pp. 902–907.
- Ezzat, A.A.; Farouk, H.A.; El-Kilany, K.S.; Abdelmoneim, A.F. Development of a Stochastic Genetic Algorithm for Traffic Signal Timings Optimization. In Proceedings of the 2014 Industrial and Systems Engineering Research Conference, Montreal, QC, Canada, 10 January 2014.
- Gündoğan, F.; Karagoz, Z.; Kocyigit, N.; Karadag, A.; Ceylan, H.; Murat, Y.Ş. An Evaluation of Adaptive Traffic Control System in Istanbul, Turkey. J. Traffic Logist. Eng. 2014, 2, 198–201. [Google Scholar] [CrossRef]
- Chin, Y.K.; Yong, K.; Bolong, N.; Yang, S.S.; Teo, K.T.K. Multiple intersections traffic signal timing optimization with genetic algorithm. In Proceedings of the IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November, 2011; pp. 454–459.
- Odeh, S.M. Management of an intelligent traffic light system by using genetic algorithm. J. Image Graph. 2013, 1, 90–93. [Google Scholar] [CrossRef]
- Hsieh, P.C.; Chen, Y.R.; Wu, W.H.; Hsiung, P.A. Timing Optimization and Control for Smart Traffic. In Proceedings of the IEEE International Conference on Internet of Things (iThings), Green Computing and Communications (GreenCom), and Cyber, Physical and Social Computing (CPSCom), Taipei, Taiwan, 1–3 September 2014; pp. 9–16.
- Pizzi, S.; Condoluci, M.; Araniti, G.; Molinaro, A.; Iera, A. A Novel Approach for Unicast and Multicast Traffic Management in Wireless Networks. In Proceeding of the IEEE 81st Vehicular Technology Conference (VTC), Glasgow, Scotland, 11–14 May 2015; pp. 1–5.
- Chen, B.; Cheng, H.H. A review of the applications of agent technology in traffic and transportation systems. IEEE Trans. Intell. Transp. Syst. 2010, 11, 485–497. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Networks 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Leccese, F. Remote-control system of high efficiency and intelligent street lighting using a ZigBee network of devices and sensors. IEEE Trans. Power Deliv. 2013, 28, 21–28. [Google Scholar] [CrossRef]
- Leccese, F.; Cagnetti, M.; Calogero, A.; Trinca, D.; Pasquale, S.d.; Giarnetti, S.; Cozzella, L. A New Acquisition and Imaging System for Environmental Measurements: An Experience on the Italian Cultural Heritage. Sensors 2014, 14, 9290–9312. [Google Scholar] [CrossRef] [PubMed]
- Leccese, F.; Cagnetti, M.; Trinca, D. A smart city application: A fully controlled street lighting isle based on Raspberry-Pi card, a ZigBee sensor network and WiMAX. Sensors 2014, 14, 24408–24424. [Google Scholar] [CrossRef] [PubMed]
- Tubaishat, M.; Qi, Q.; Shang, Y.; Shi, H. Wireless sensor-based traffic light control. In Proceedings of the 5th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 10–12 January 2008; pp. 702–706.
- Tuyttens, D.; Fei, H.; Mezmaz, M.; Jalwan, J. Simulation-based genetic algorithm towards an energy-efficient railway traffic control. Math. Probl. Eng. 2013. [Google Scholar] [CrossRef]
- Yoneyama, A.; Yeh, C.H.; Kuo, C.C.J. Robust vehicle and traffic information extraction for highway surveillance. EURASIP J. Appl. Signal Process. 2005, 2305–2321. [Google Scholar] [CrossRef]
- Tubaishat, M.; Shang, Y.; Shi, H. Adaptive traffic light control with wireless sensor networks. In Proceedings of the IEEE Consumer Communications and Networking Conference, Cork, Ireland, 11–13 January 2007; pp. 187–191.
- Tubaishat, M.; Zhuang, P.; Qi, Q.; Shang, Y. Wireless sensor networks in intelligent transportation systems. Wirel. Commun. Mob. Comput. 2009, 9, 287–302. [Google Scholar] [CrossRef]
- Bachir, A.; Dohler, M.; Watteyne, T.; Leung, K.K. MAC essentials for wireless sensor networks. IEEE Commun. Surv. Tutor. 2010, 12, 222–248. [Google Scholar] [CrossRef]
- Abondo, C.; Pierre, S. Dynamic location and forwarding pointers for mobility management. Mob. Inf. Syst. 2005, 1, 3–24. [Google Scholar] [CrossRef]
- Tan, S.K.; Sooriyabandara, M.; Fan, Z. M2M communications in the smart grid: Applications, standards, enabling technologies, and research challenges. Int. J. Digit. Multimedia Broadcast. 2011, 2011, 289015. [Google Scholar] [CrossRef]
- Biral, A.; Centenaro, M.; Zanella, A.; Vangelista, L.; Zorzi, M. The challenges of M2M massive access in wireless cellular networks. Digit. Commun. Netw. 2015, 1, 1–19. [Google Scholar] [CrossRef]
- Taleb, T.; Kunz, A. Machine type communications in 3GPP networks: Potential, challenges, and solutions. IEEE Commun. Mag. 2012, 50, 178–184. [Google Scholar] [CrossRef]
- Beecham Research. Worldwide Cellular M2M Modules Forecast Market Brief; Beecham Research Limited: Cambridge, UK, 2010. [Google Scholar]
- Lucero, S. Maximizing Mobile Operator Opportunities in M2M: The Benefits of An M2M-Optimized Network; ABI Research: Oyster Bay, NY, USA, 2010. [Google Scholar]
- Cisco Visual Networking Index: Global Mobile Data Traffic Forecast. Available online: http://www.cisco.com/c/en/us/solutions/collateral/service-provider/visual-networking-index-vni/mobile-white-paper-c11-520862.html (accessed on 20 October 2016).
- Smart Wearables Market to Generate $53BN Hardware Revenues by 2019. Available online: https://www.juniperresearch.com/press/press-releases/smart-wearables-market-to-generate-$53bn-hardware (accessed on 20 October 2016).
- OECD Digital Economy Papers. Machine-to-Machine Communications Connecting Billions of Devices; OECD Publishing: Paris, France, 2012. [Google Scholar]
- Polese, M.; Centenaro, M.; Zanella, A.; Zorzi, M. On the Evaluation of LTE Random Access Channel Overload in a Smart City Scenario. CoRR 2016. [Google Scholar] [CrossRef]
- Mahmoodi, T. 5G and Software-defined Networking (SDN). In Proceedings of the IET Conference, Stevenage, UK, 17 March 2015.
- Softwarization and Virtualization in 5G Networks for Smart Cities. Available online: https://www.researchgate.net/profile/Massimo_Condoluci/publication/287644336_Softwarization_and_Virtualization_in_5G_Networks_for_Smart_Cities/links/567825e808ae502c99d56428.pdf (accessed on 20 October 2016).
- NOKIA white paper. LTE evolution for IoT connectivity. Available online: http://resources.alcatel-lucent.com/asset/200178 (accessed on 20 October 2016).
- Orsino, A.; Araniti, G.; Militano, L.; Alonso-Zarate, J.; Molinaro, A.; Iera, A. Energy Efficient IoT Data Collection in Smart Cities Exploiting D2D Communications. Sensors 2016, 16, 836. [Google Scholar] [CrossRef] [PubMed]
- IEEE. Standard Association. Available online: https://standards.ieee.org/about/get/802/802.11.html (accessed on 19 August 2016).
- Masek, P.; Muthanna, A.; Hosek, J. Suitability of MANET Routing Protocols for the Next-Generation National Security and Public Safety Systems. In Proceedings of the International Conference on Internet of Things, Smart Spaces, and Next Generation Networks and Systems, Petersburg, Russia, 26–28 August 2015; pp. 242–253.
- Wireless M-BUS: An attractive M2M technology for 5G-grade home automation. Available online: http://s3.amazonaws.com/academia.edu.documents/40669513/lnicst.pdf?AWSAccessKeyId=AKIAJ56TQJRTWSMTNPEA&Expires=1478227571&Signature=ac4HpHxYyRo54dBFcyPm8Txf7u83D&response-content-disposition=inline3B20filename3DWireless_M-BUS_An_Attractive_M2M_Technol.pdf (accessed on 20 October 2016).
- Araniti, G.; Campolo, C.; Condoluci, M.; Iera, A.; Molinaro, A. LTE for vehicular networking: A survey. IEEE Commun. Mag. 2013, 51, 148–157. [Google Scholar] [CrossRef]
- Lane, N.D.; Miluzzo, E.; Lu, H.; Peebles, D.; Choudhury, T.; Campbell, A.T. A survey of mobile phone sensing. IEEE Commun. Mag. 2010, 48, 140–150. [Google Scholar] [CrossRef]
- Ganti, R.K.; Ye, F.; Lei, H. Mobile crowdsensing: Current state and future challenges. IEEE Commun. Mag. 2011, 49, 32–39. [Google Scholar] [CrossRef]
- Mahmoodi, T.; Seetharaman, S. Traffic Jam: Handling the Increasing Volume of Mobile Data Traffic. IEEE Veh. Technol. Mag. 2014, 9, 56–62. [Google Scholar] [CrossRef]
- Zhang, Z.; Ho, P.H.; Naït-Abdesselam, F. RADAR: A reputation-driven anomaly detection system for wireless mesh networks. Wirel. Netw. 2010, 16, 2221–2236. [Google Scholar] [CrossRef]
- Daly, E.M.; Lecue, F.; Bicer, V. Westland row why so slow?: Fusing social media and linked data sources for understanding real-time traffic conditions. In Proceedings of the 2013 international conference on Intelligent user interfaces, Santa Monica, CA, USA, 19–22 March 2013; pp. 203–212.
- Araniti, G.; Orsino, A.; Militano, L.; Wang, L.; Iera, A. Context-aware Information Diffusion for Alerting Messages in 5G Mobile Social Networks. IEEE Internet Things J. 2016, PP, 1–10. [Google Scholar] [CrossRef]
- Lécué, F.; Schumann, A.; Sbodio, M.L. Applying semantic web technologies for diagnosing road traffic congestions. In Proceedings of the Iternational Semantic Web Conference, Boston, MA, USA, 11–15 November 2012; pp. 114–130.
- Kumar, A.; Gupta, S.K.; Rai, A.K.; Sinha, S. Social networking sites and their security issues. Int. J. Sci. Res. Publ. 2013, 3, 1–5. [Google Scholar]
- Zhang, K.; Liang, X.; Shen, X.; Lu, R. Exploiting multimedia services in mobile social networks from security and privacy perspectives. IEEE Commun. Mag. 2014, 52, 58–65. [Google Scholar] [CrossRef]
- Militano, L.; Orsino, A.; Araniti, G.; Nitti, M.; Atzori, L.; Iera, A. Trust-based and Social-aware Coalition Formation Game for Multihop Data Uploading in 5G Systems. Comput. Netw. 2016, 56, 3594–3608. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Z.; Zhang, W. Mobitrust: Trust management system in mobile social computing. In Proceedings of the IEEE 10th International Conference on Computer and Information Technology (CIT), Bradford, UK, 29 June–1 July 2010; pp. 954–959.
- Dwyer, C.; Hiltz, S.; Passerini, K. Trust and privacy concern within social networking sites: A comparison of Facebook and MySpace. In Proceedings of the AMCIS, Keystone, CO, USA, 9–12 August 2007.
- Golbeck, J. Trust and nuanced profile similarity in online social networks. ACM Trans. Web (TWEB) 2009, 3, 12. [Google Scholar] [CrossRef]
- Militano, L.; Orsino, A.; Araniti, G.; Molinaro, A.; Iera, A. Overlapping coalitions for D2D-supported data uploading in LTE-A systems. In Proceedings of the IEEE 26th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hongkong, China, 30 August–2 September 2015; pp. 1526–1530.
- Zhao, J.; Cao, G. VADD: Vehicle-assisted data delivery in vehicular ad hoc networks. IEEE Trans. Veh. Technol. 2008, 57, 1910–1922. [Google Scholar] [CrossRef]
- Li, F.; Wang, Y. Routing in vehicular ad hoc networks: A survey. IEEE Veh. Technol. Mag. 2007, 2, 12–22. [Google Scholar] [CrossRef]
- Santos, R.; Edwards, A.; Alvarez, O. Towards an inter-vehicle communication algorithm. In Proceedings of the 3rd International Conference on Electrical and Electronics Engineering, IEEE, Veracruz, Mexico, 6–8 September 2006; pp. 1–4.
- Ding, Y.; Wang, C.; Xiao, L. A static-node assisted adaptive routing protocol in vehicular networks. In Proceedings of the Fourth ACM International Workshop on Vehicular ad hoc Networks, Montreal, QC, Canada, 10 September 2007; pp. 59–68.
- Korkmaz, G.; Ekici, E.; Özgüner, F.; Özgüner, Ü. Urban multi-hop broadcast protocol for inter-vehicle communication systems. In Proceedings of the 1st ACM international workshop on Vehicular ad hoc networks, ACM, Philadelphia, PA, USA, 1 October 2004; pp. 76–85.
- Arzil, S.A.; Aghdam, M.H.; Jamali, M.A.J. Adaptive routing protocol for VANETS in city environments using real-time traffic information. In Proceedings of the International Conference on Information, Networking and Automation (ICINA), Kunming, China, 18–19 October 2010; pp. V2–V132.
- Gong, J.; Xu, C.Z.; Holle, J. Predictive directional greedy routing in vehicular ad hoc networks. In Proceedings of the 27th International Conference on Distributed Computing Systems Workshops, ICDCSW, Toronto, ON, Canada, 22–29 June 2007; pp. 1–8.
- Mo, Z.; Zhu, H.; Makki, K.; Pissinou, N. MURU: A multi-hop routing protocol for urban vehicular ad hoc networks. In Proceedings of the Third Annual International Conference on Mobile And Ubiquitous Systems: Networking & Services, San Jose, CA, USA, 17–21 July 2006; pp. 1–8.
- Seet, B.C.; Liu, G.; Lee, B.S.; Foh, C.H.; Wong, K.J.; Lee, K.K. A-STAR: A mobile ad hoc routing strategy for metropolis vehicular communications. In Proceedings of the 3rd International Conference on Electrical and Electronics Engineering International Conference on Research in Networking, Athens, Greece, 9–14 May 2004; pp. 989–999.
- Jerbi, M.; Meraihi, R.; Senouci, S.M.; Ghamri-Doudane, Y. GyTAR: Improved greedy traffic aware routing protocol for vehicular ad hoc networks in city environments. In Proceedings of the 3rd international workshop on Vehicular ad hoc networks, Glasgow, Scotland, 24–28 June 2007; pp. 88–89.
- Sun, W.; Yamaguchi, H.; Yukimasa, K.; Kusumoto, S. Gvgrid: A QoS routing protocol for vehicular ad hoc networks. In Proceedings of the 14th IEEE International Workshop on Quality of Service, New Haven, CT, USA, 19–21 June 2006; pp. 130–139.
- Durresi, M.; Durresi, A.; Barolli, L. Emergency broadcast protocol for inter-vehicle communications. In Procedings of the 11th International Conference on Parallel and Distributed Systems (ICPADS’05), Fuduoka, Japan, 20–22 July 2005; pp. 402–406.
- Sun, M.T.; Feng, W.C.; Lai, T.H.; Yamada, K.; Okada, H.; Fujimura, K. GPS-based message broadcasting for inter-vehicle communication. In Proceedings of the Parallel Processing Conference, Boston, MA, USA, 24–28 September 2000; pp. 279–286.
- Bachir, A.; Benslimane, A. A multicast protocol in ad hoc networks inter-vehicle geocast. In Proceedings of the 57th IEEE Semiannual Vehicular Technology Conference, Jeju, Korea, 22–25 April 2003; pp. 2456–2460.
- Watteyne, T.; Augé-Blum, I.; Dohler, M.; Ubéda, S.; Barthel, D. Centroid virtual coordinates—A novel near-shortest path routing paradigm. Comput. Netw. 2009, 53, 1697–1711. [Google Scholar] [CrossRef]
- Tonguz, O.K.; Wisitpongphan, N.; Bai, F. DV-CAST: A distributed vehicular broadcast protocol for vehicular ad hoc networks. IEEE Wirel. Commun. 2010, 17, 47–57. [Google Scholar] [CrossRef]
- Naumov, V.; Gross, T.R. Connectivity-aware routing (CAR) in vehicular ad-hoc networks. In Proceedings of the 6th IEEE International Conference on Computer Communications, Anchorage, KY, USA, 6–12 May 2007; pp. 1919–1927.
- Yiltas, D.; Perros, H. Quality of service-based multi-domain routing under multiple quality of service metrics. IET Commun. 2011, 5, 327–336. [Google Scholar] [CrossRef]
- Balon, S.; Skivée, F.; Leduc, G. How well do traffic engineering objective functions meet TE requirements? In Proceedings of the International Conference on Research in Networking, Coimbra, Portugal, 15–19 May 2006; pp. 75–86.
- Woeginger, G.J. Exact algorithms for NP-hard problems: A survey. In Combinatorial Optimization–Eureka; Springer: Aussois, France, 2003; pp. 185–207. [Google Scholar]
- Vořechovskỳ, M.; Novák, D. Correlation control in small-sample Monte Carlo type simulations I: A simulated annealing approach. Probab. Eng. Mech. 2009, 24, 452–462. [Google Scholar] [CrossRef]
- Xie, H.; Zhang, M. Parent selection pressure auto-tuning for tournament selection in genetic programming. IEEE Trans. Evolut. Comput. 2013, 17, 1–19. [Google Scholar] [CrossRef]
- Smart City BRNO. Available online: http://www2.brno.cz/index.php?lan=en&nav01=20608&nav02=20651 (accessed on 18 October 2016).
- Google Maps. Available online: https://goo.gl/maps/JcWS9ED4uvq (accessed on 19 October 2016).
- Bang-Jensen, J.; Gutin, G.; Yeo, A. When the greedy algorithm fails. Discret. Optim. 2004, 1, 121–127. [Google Scholar] [CrossRef]
- Ometov, A.; Masek, P.; Malina, L.; Florea, R.; Hosek, J.; Andreev, S.; Hajny, J.; Niutanen, J.; Koucheryavy, Y. Feasibility characterization of cryptographic primitives for constrained (wearable) IoT devices. In Proceedings of the IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), Sydney, Australia, 14–18 March 2016; pp. 1–6.
- Intel® Edison: One Tiny Platform, Endless Possibility. Available online: http://www.intel.de/content/www/de/de/do-it-yourself/edison.html (accessed on 19 October 2016).
- Intel® Developer Zone, Installing the Eclipse* IDE. Available online: https://software.intel.com/en-us/installing-the-eclipse-ide (accessed on 19 October 2016).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SIGFOX | LoRa | Clean IoT | NB LTE-M Release 13 | LTE-M Release 12/13 | EC-GSM Release 13 | 5G (Targets) | |
|---|---|---|---|---|---|---|---|
| Range/MCL (Maximum Coupling Loss) | <13 km 160 dB | <11 km 157 dB | <15 km 164 dB | <15 km 164 dB | <11 km 156 dB | <15 km 164 dB | <15 km 164 dB |
| Bandwidth | Unlicensed 900 MHz 100 Hz | Unlicensed 900 MHz <900 Hz | Licensed 7–900 MHz 200 kHz or dedicated | Licensed 7–900 MHz 200 kHz or shared | Licensed 7–900 MHz 1.4 MHz or shared | Licensed 8–900 MHz 2.4 MHz or shared | Licensed 7–900 MHz shared |
| Data Rate | <100 bps | <10 kbps | <50 kbps | <150 kbps | <1 Mbps | <10 kbps | <1 Mbps |
| Battery Life | >10 years | >10 years | >10 years | >10 years | >10 years | >10 years | >10 years |
| Availability | Today | Today | 2016/2017 | 2016/2017 | 2016/2017 | 2016/2017 | Beyond 2020 |
| Comm. Overhead | Comput. Overhead | Scalability Level | Latency | Delivery Ratio | Network Flexibility | Target Scenario | Infrastructure Dependent | |
|---|---|---|---|---|---|---|---|---|
| VADD [64] | Low | Medium | Medium | Medium | Low | High | Rural | No |
| GPCR [65] | Low | Low | Medium | High | Low | No | Urban | No |
| LORA-CBF [66] | Medium | Low | High | Low | High | Medium | Urban | No |
| SADV [67] | Low | Low | Medium | Medium | Medium | High | Urban | Yes |
| UMB [68] | Medium | Medium | Medium | High | Medium | Medium | Urban | Yes |
| ARBR [69] | Low | Medium | Medium | Medium | High | High | Urban | Yes |
| PDGR [70] | Medium | Medium | Medium | Medium | Medium | No | Urban | No |
| MURU [71] | Low | Medium | Medium | Low | Medium | High | Urban | No |
| A-star [72] | Medium | Low | Medium | Medium | Medium | No | Urban | No |
| GyTAR [73] | Low | Low | Medium | Low | Medium | High | Urban | No |
| GVGrid [74] | Medium | Medium | Medium | Medium | Medium | Medium | Urban | Yes |
| BROADCOMM [75] | High | Low | Medium | Low | Low | Medium | Highway | Yes |
| V-TRADE [76] | Medium | Low | Medium | Medium | Low | No | Highway | No |
| IVG [77] | Low | Low | High | Low | Medium | High | Highway | No |
| 3rule [78] | Low | Low | Unknown | Unknown | High | No | All | Yes |
| DV-CAST [79] | Low | Low | High | Low | Medium | Very High | All | No |
| CAR [80] | Medium | Medium | Medium | Medium | Medium | Medium | All | Yes |
| Device | Type | SoC | Processor | RAM |
|---|---|---|---|---|
| Intel® Edison | IoT Development Board | Atom + Quark | 500 MHz, Dual-Core Intel® Atom™ CPU, 100 Mhz MCU | 1 GB |
| Intel® Galileo Gen 2 | IoT Development Board | Quark X1000 | 400 MHz, Single-Core 32-bit Intel Pentium (ISA)-compatible | 256 MB |
| Raspberry Pi 1 model B+ | IoT Development Board | BCM2835 | 700 MHz, Single-Core ARM 11 | 512 MB |
| Raspberry Pi 2 model B | IoT Development Board | BCM2836 | 900 MHz, Quad-Core ARM Cortex-A7 | 1 GB |
| Intel® Core i7-4700MQ | Mobile CPU | Core i7 | 2.4 GHz, Quad-Core 64-bit support (Haswell architecture) | 16 GB |
| Time [s] | Difference [s] | Ratio [-] | ||
|---|---|---|---|---|
| T-shaped | Raspberry Pi 1 Model B+ | 186 | 156 | 5.16 |
| Raspberry Pi 2 Model B | 30 | 0 | 1 | |
| Intel Galileo Gen 2 | 138 | 108 | 4.6 | |
| Intel Edison | 188 | 158 | 6.26 | |
| Real-life | Raspberry Pi 1 Model B+ | 2242 | 1940 | 7.42 |
| Raspberry Pi 2 Model B | 302 | 0 | 1 | |
| Intel Galileo Gen 2 | 1793 | 1491 | 5.93 | |
| Intel Edison | 2105 | 1803 | 6.97 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masek, P.; Masek, J.; Frantik, P.; Fujdiak, R.; Ometov, A.; Hosek, J.; Andreev, S.; Mlynek, P.; Misurec, J. A Harmonized Perspective on Transportation Management in Smart Cities: The Novel IoT-Driven Environment for Road Traffic Modeling. Sensors 2016, 16, 1872. https://doi.org/10.3390/s16111872
Masek P, Masek J, Frantik P, Fujdiak R, Ometov A, Hosek J, Andreev S, Mlynek P, Misurec J. A Harmonized Perspective on Transportation Management in Smart Cities: The Novel IoT-Driven Environment for Road Traffic Modeling. Sensors. 2016; 16(11):1872. https://doi.org/10.3390/s16111872
Chicago/Turabian StyleMasek, Pavel, Jan Masek, Petr Frantik, Radek Fujdiak, Aleksandr Ometov, Jiri Hosek, Sergey Andreev, Petr Mlynek, and Jiri Misurec. 2016. "A Harmonized Perspective on Transportation Management in Smart Cities: The Novel IoT-Driven Environment for Road Traffic Modeling" Sensors 16, no. 11: 1872. https://doi.org/10.3390/s16111872
APA StyleMasek, P., Masek, J., Frantik, P., Fujdiak, R., Ometov, A., Hosek, J., Andreev, S., Mlynek, P., & Misurec, J. (2016). A Harmonized Perspective on Transportation Management in Smart Cities: The Novel IoT-Driven Environment for Road Traffic Modeling. Sensors, 16(11), 1872. https://doi.org/10.3390/s16111872