
Mode Conversion Behavior of Guided Wave in a Pipe Inspection System Based on a Long Waveguide

Abstract
:1. Introduction
2. Method
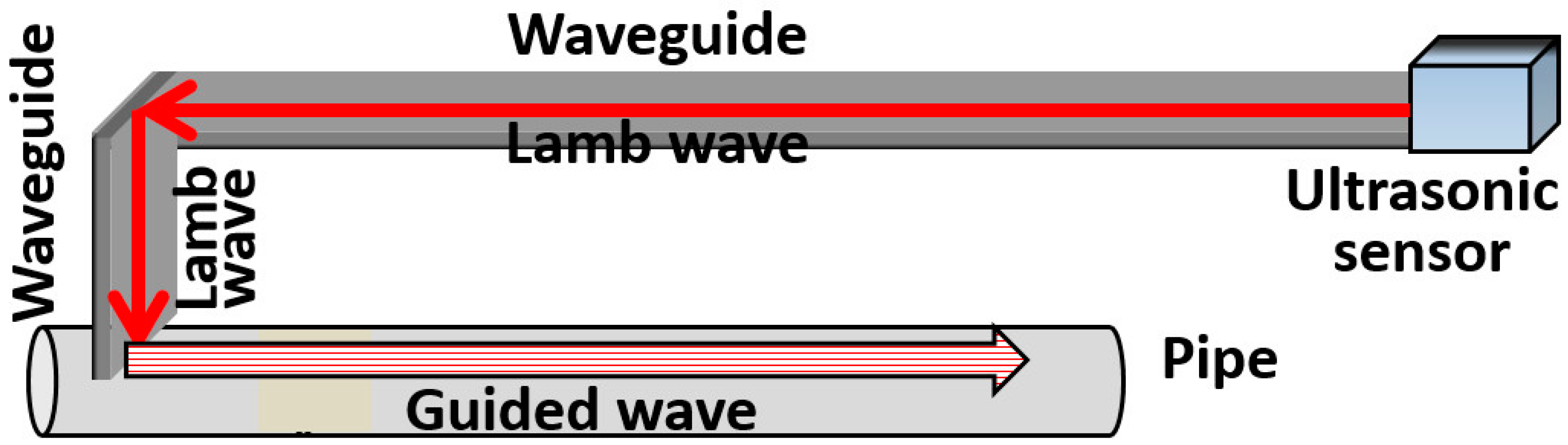
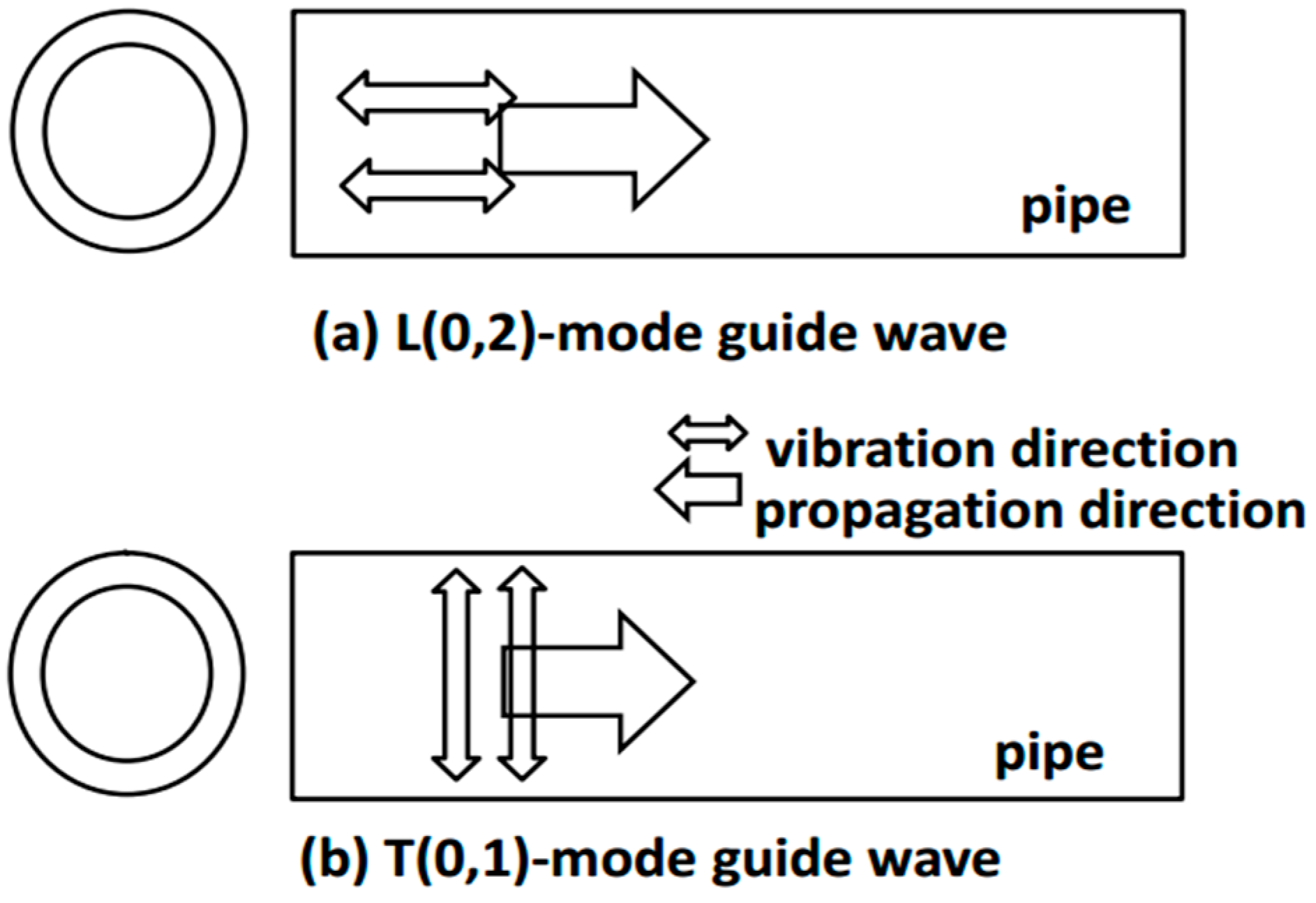
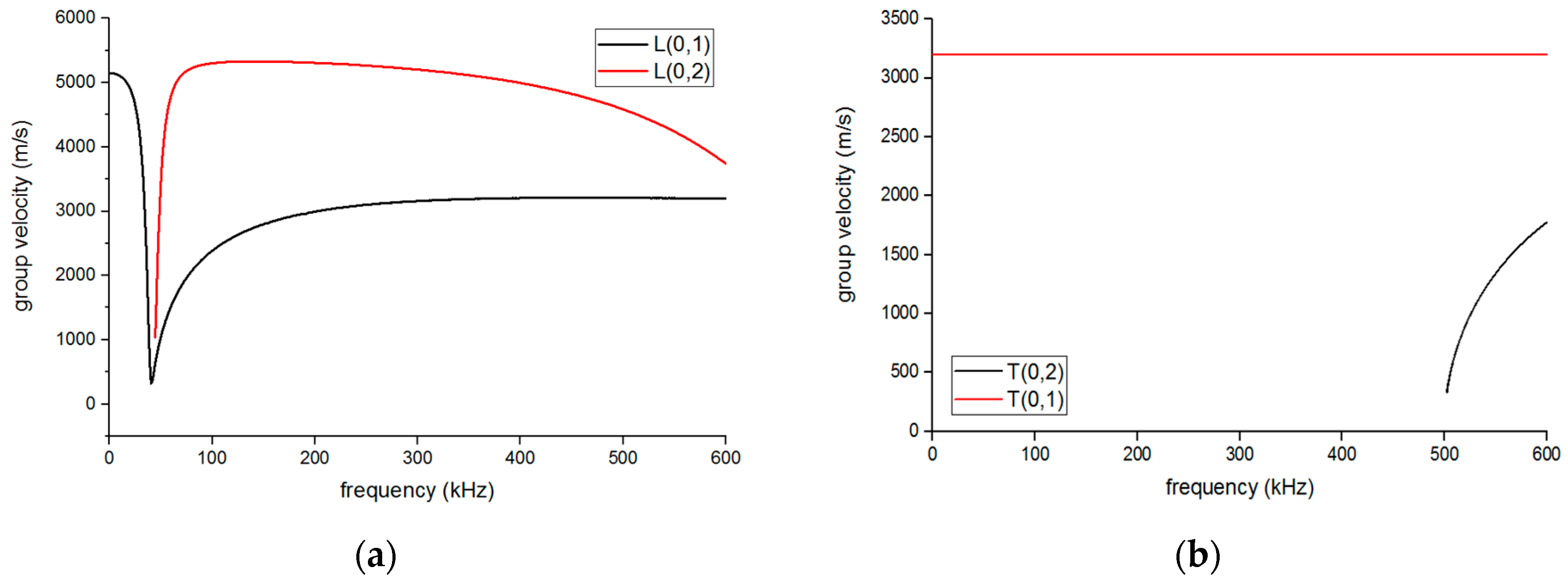
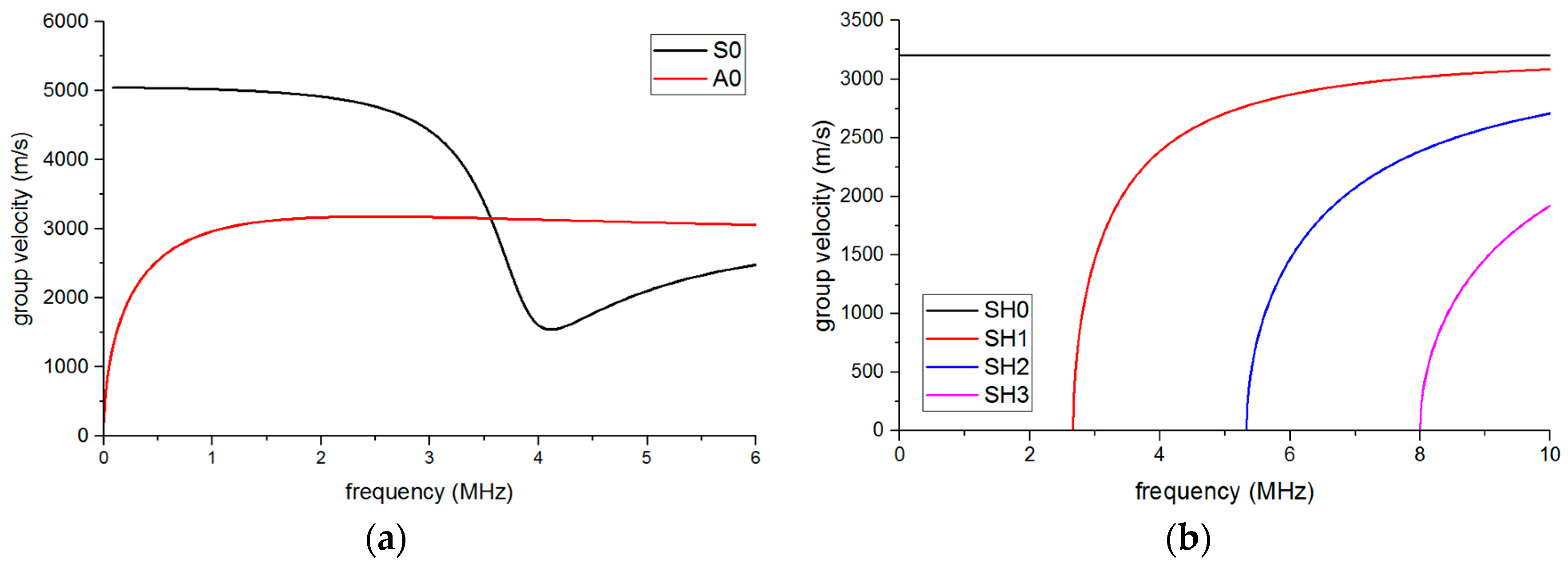
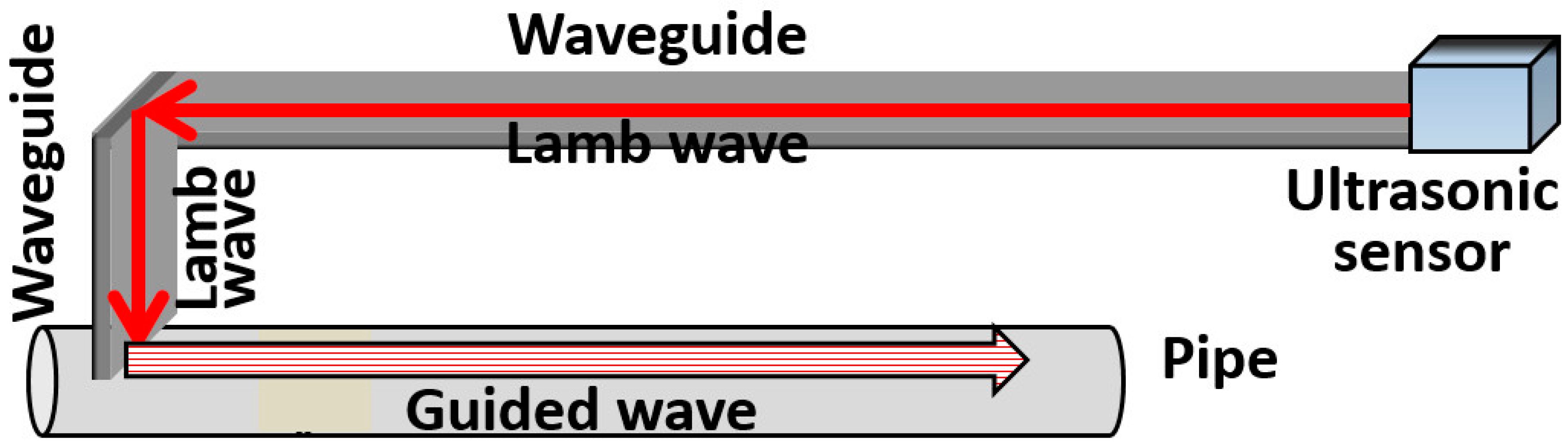
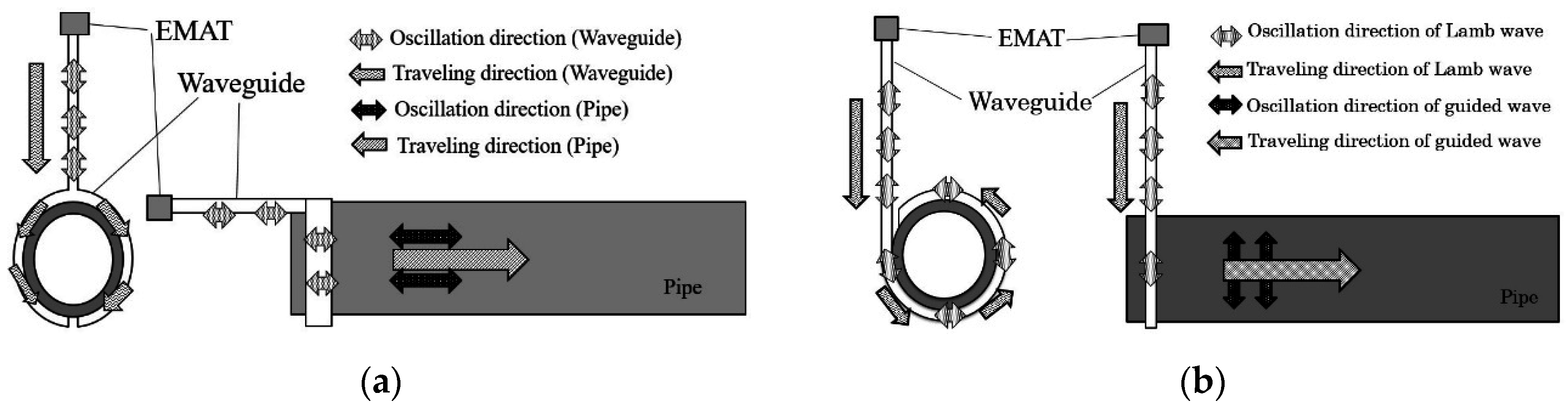
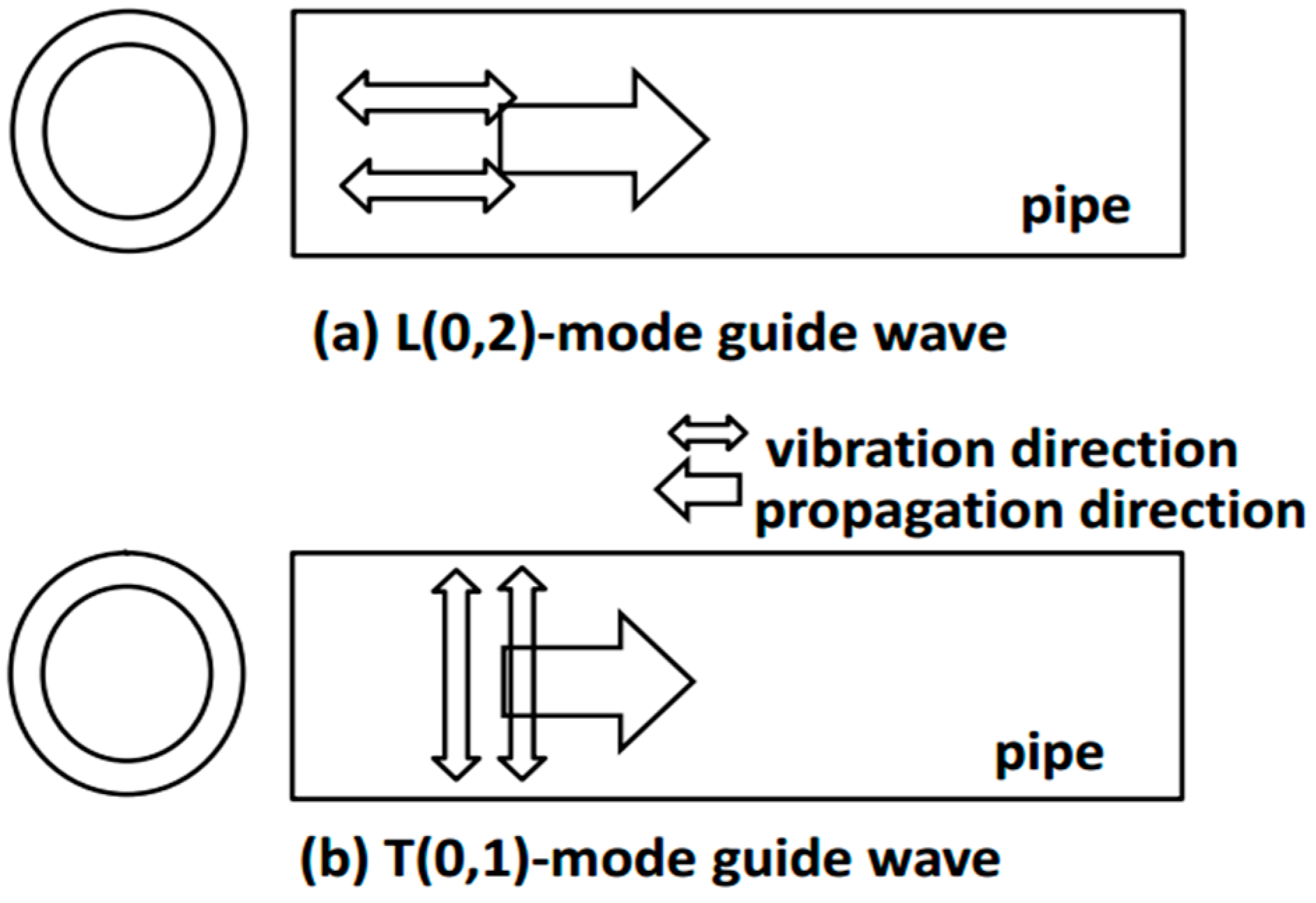
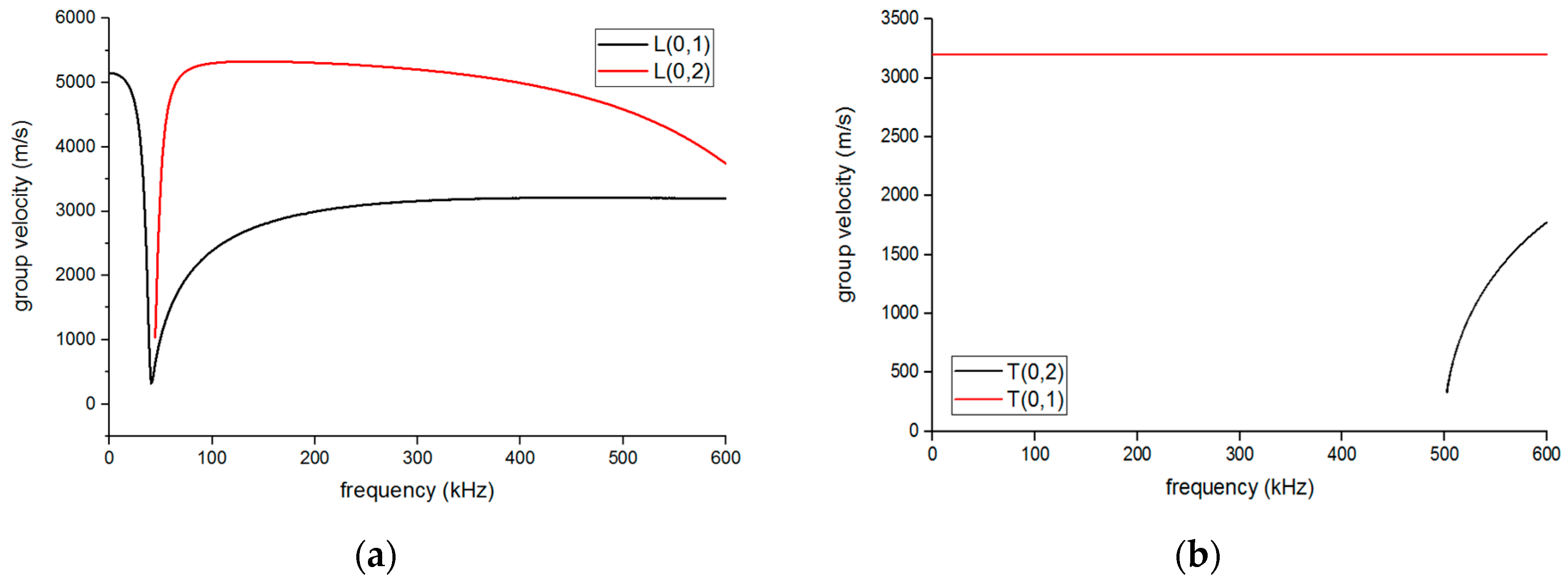
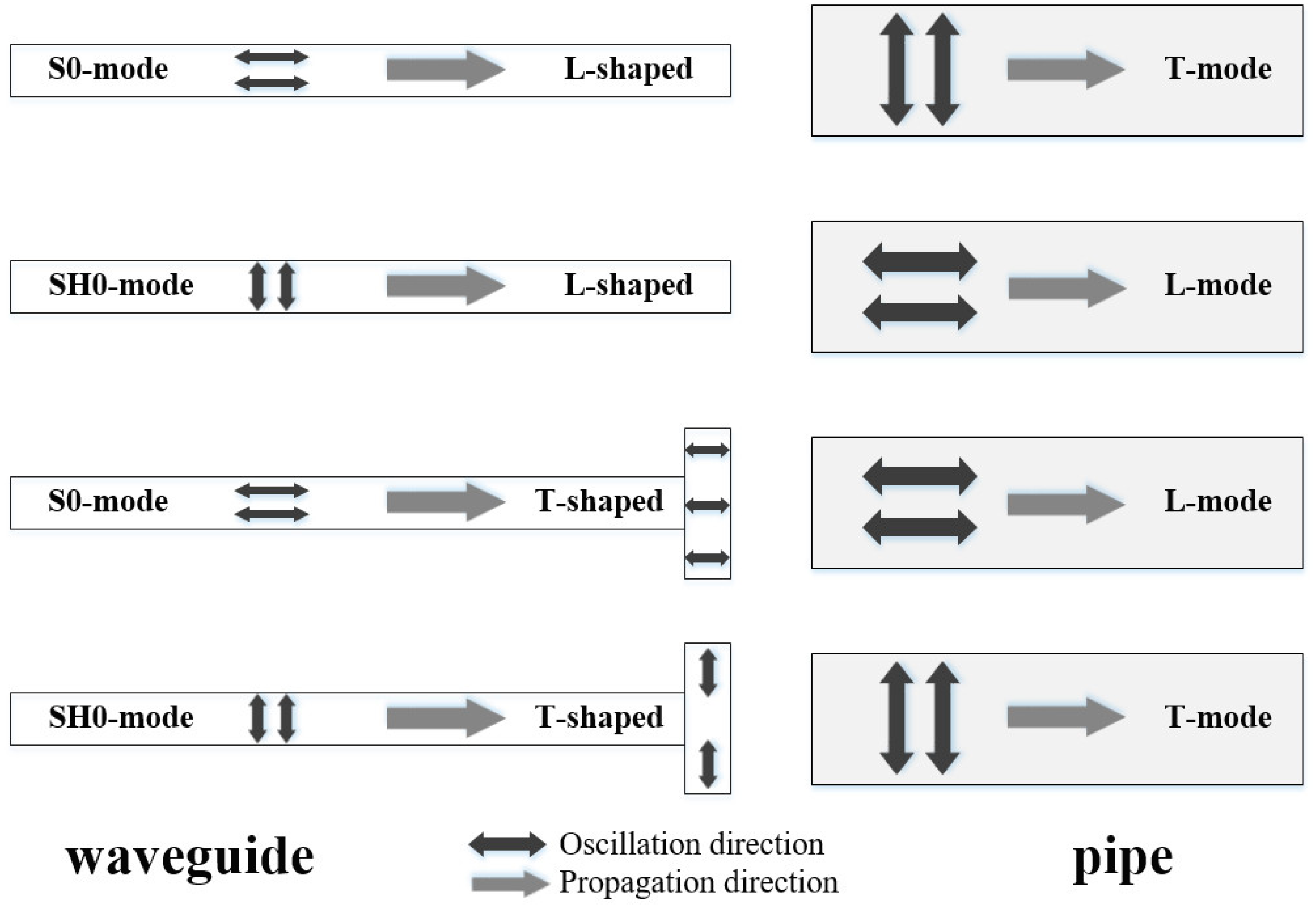
2.1. Guided Wave into a Pipe
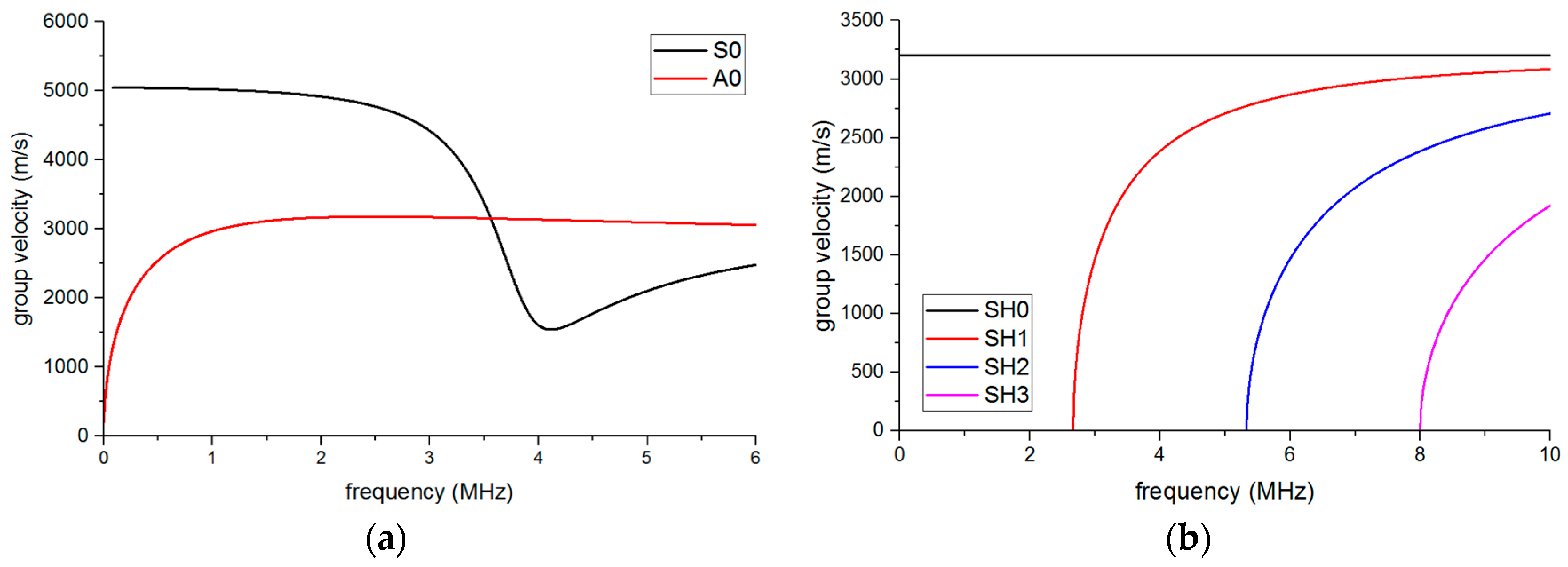
2.2. Method and Assumption
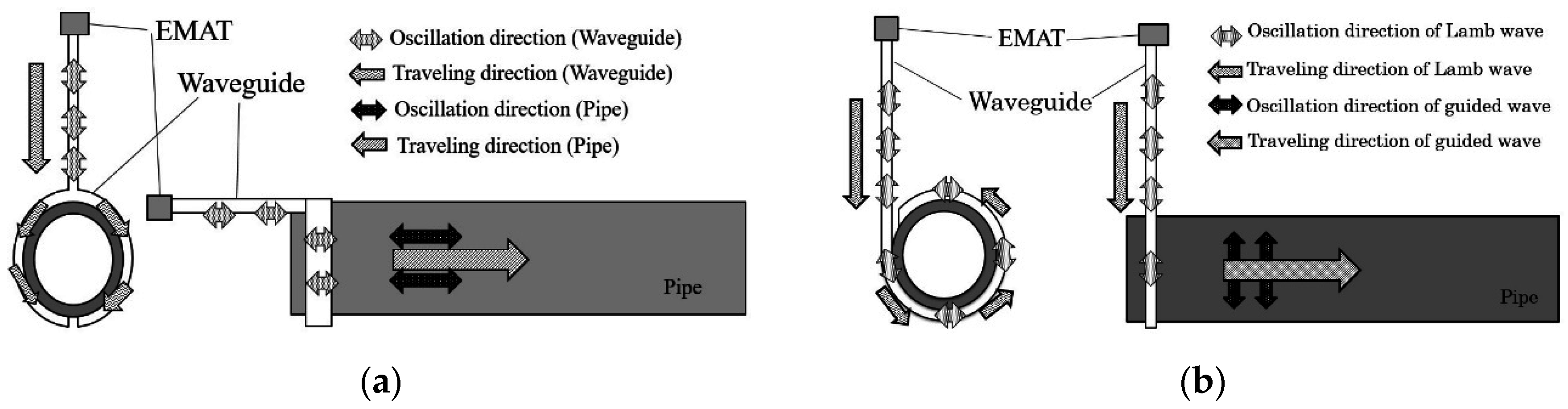
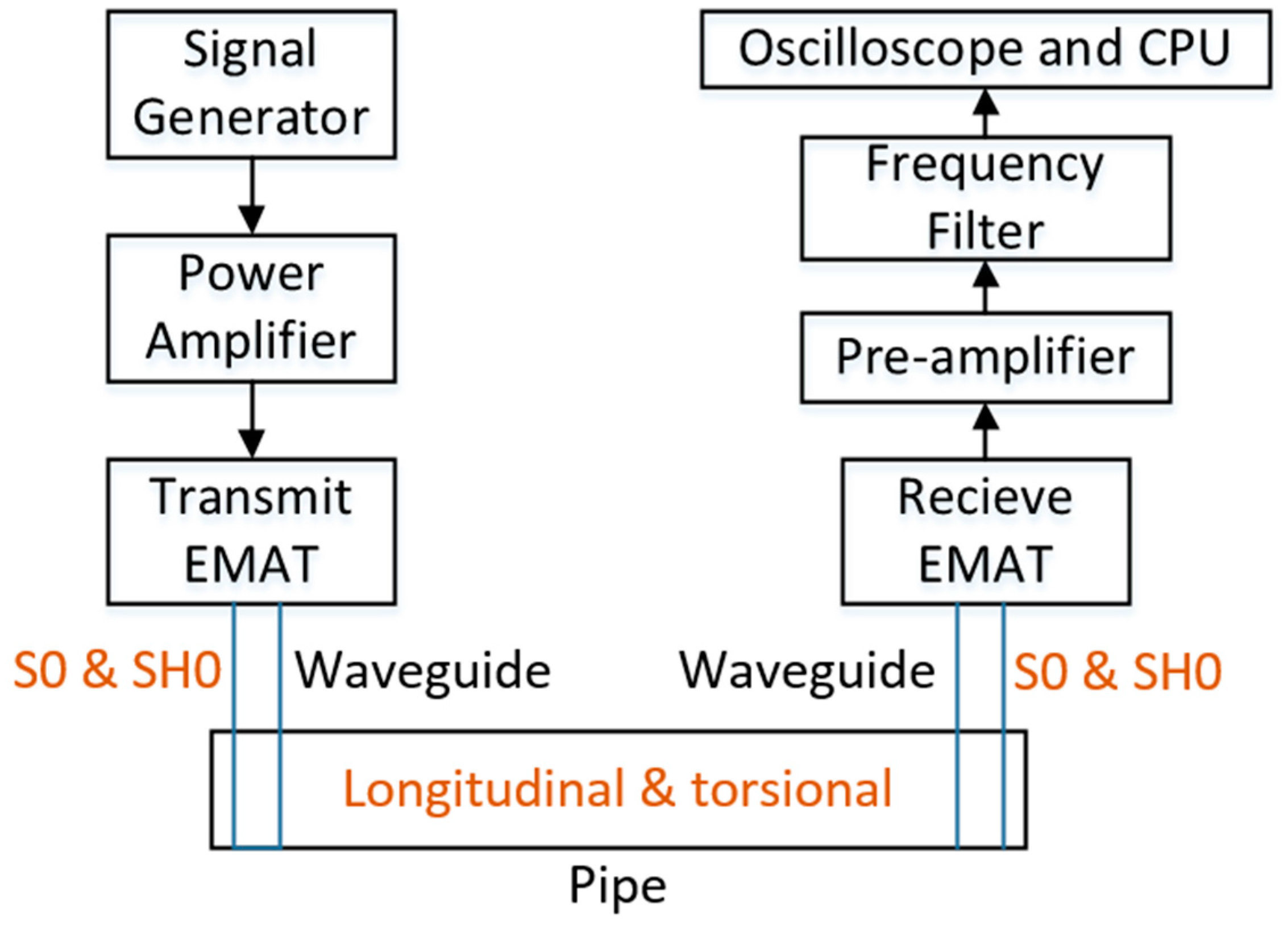
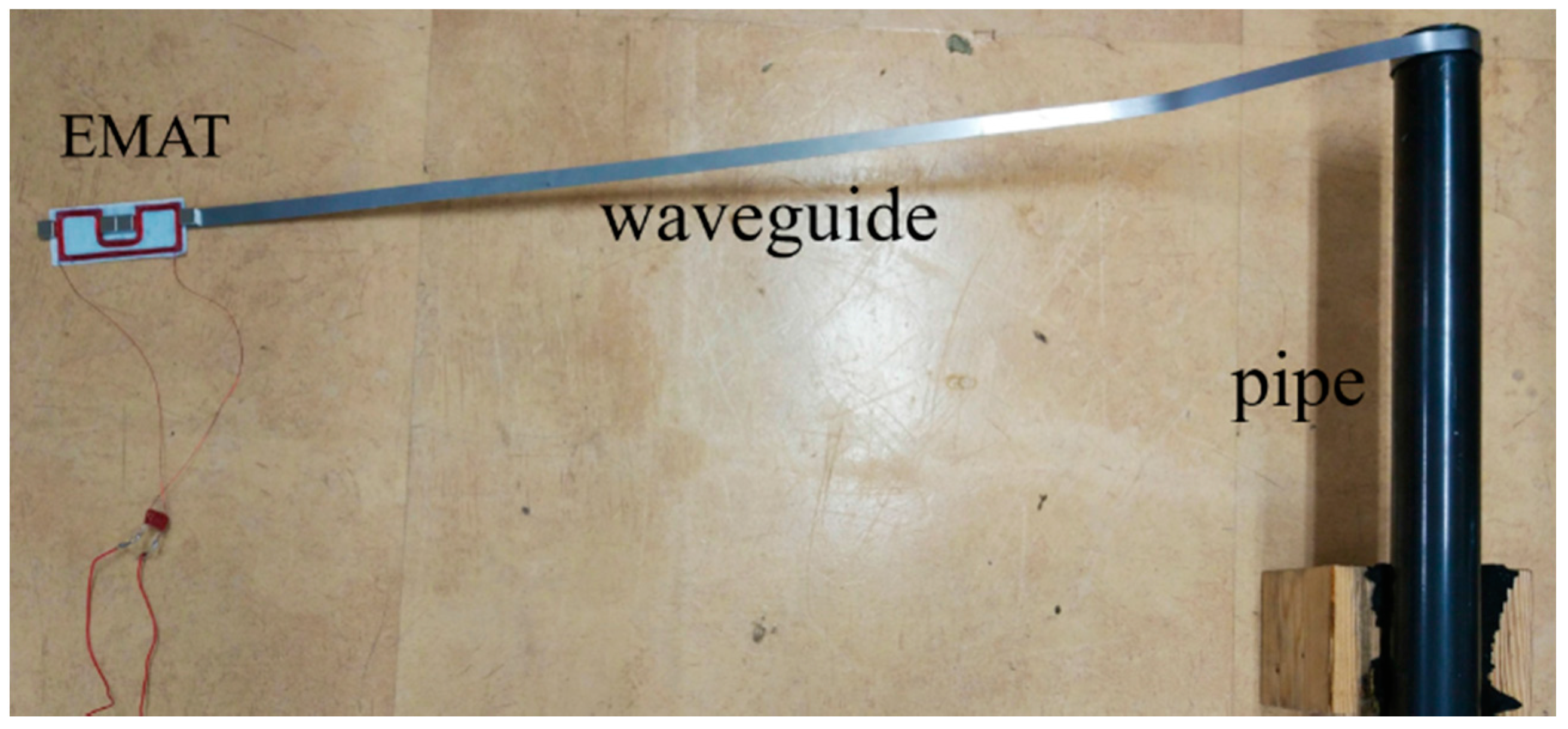
3. Experimental System
4. Development and Optimization of EMATs
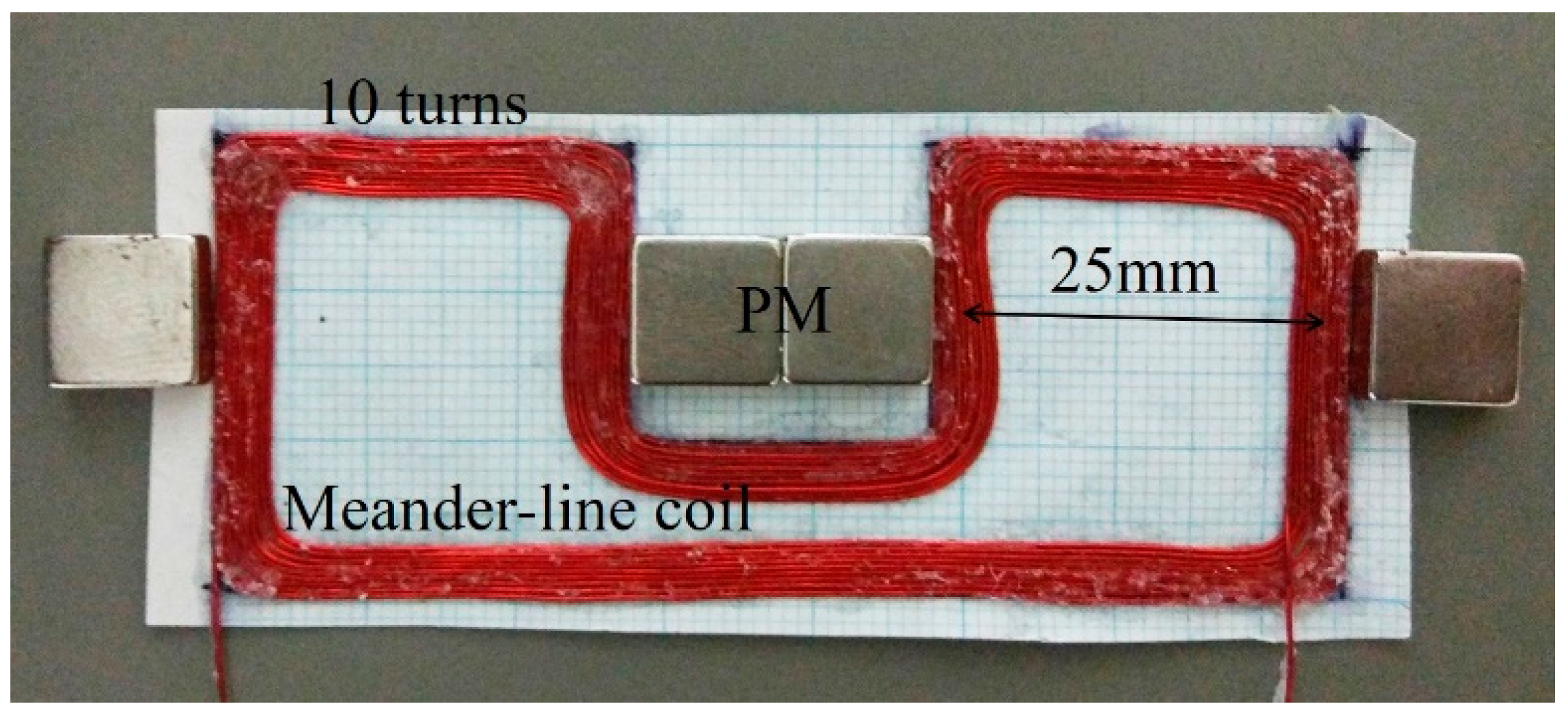
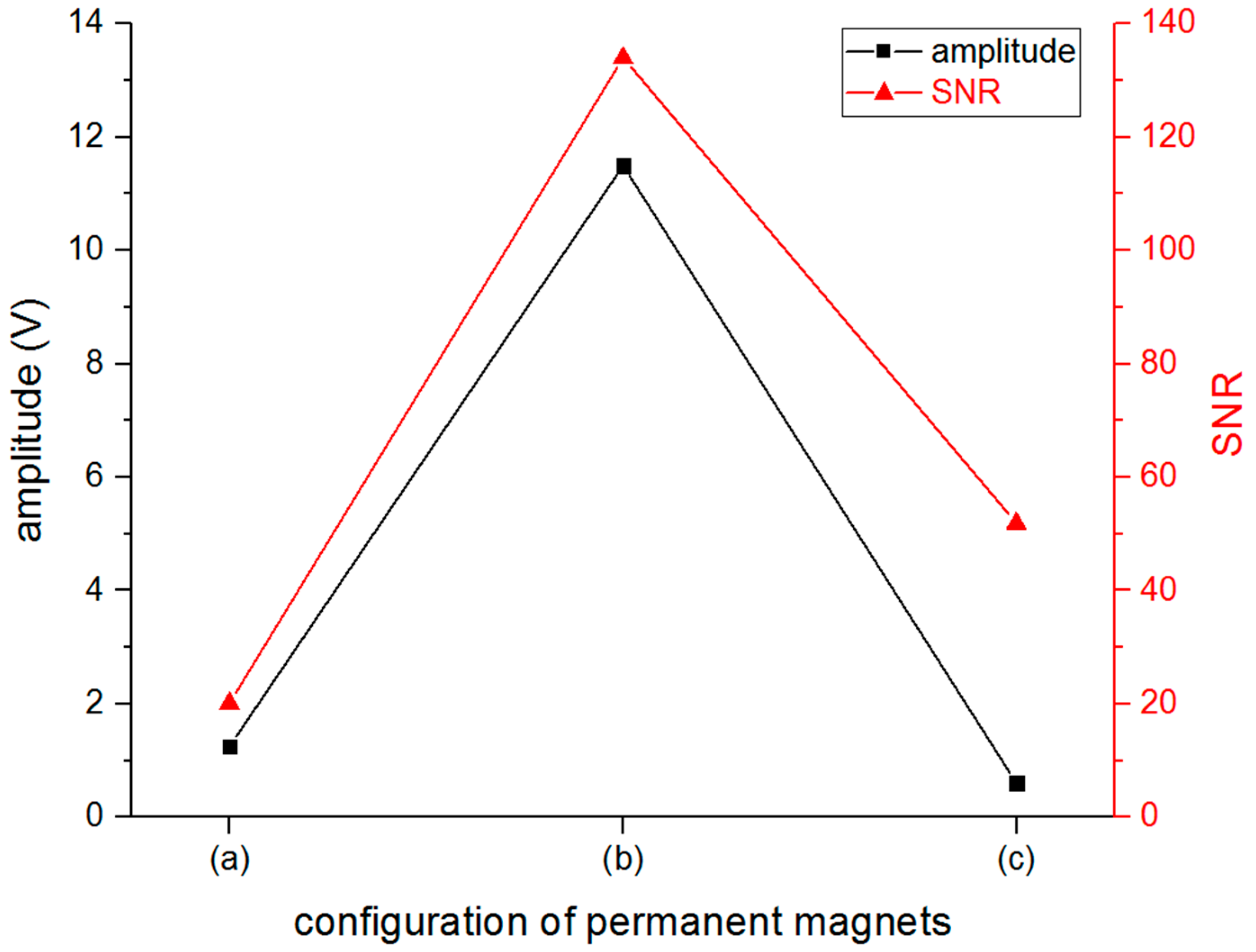
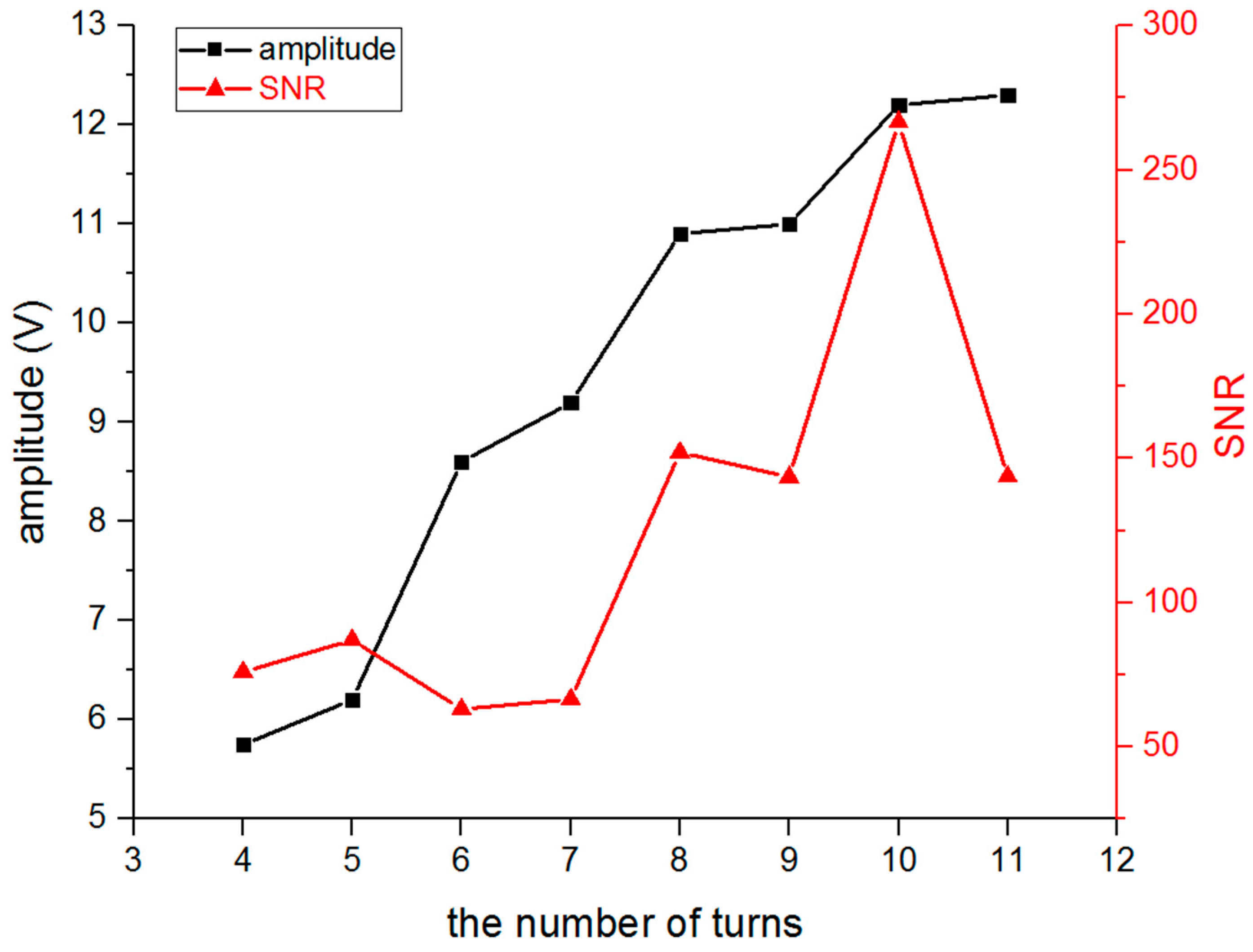
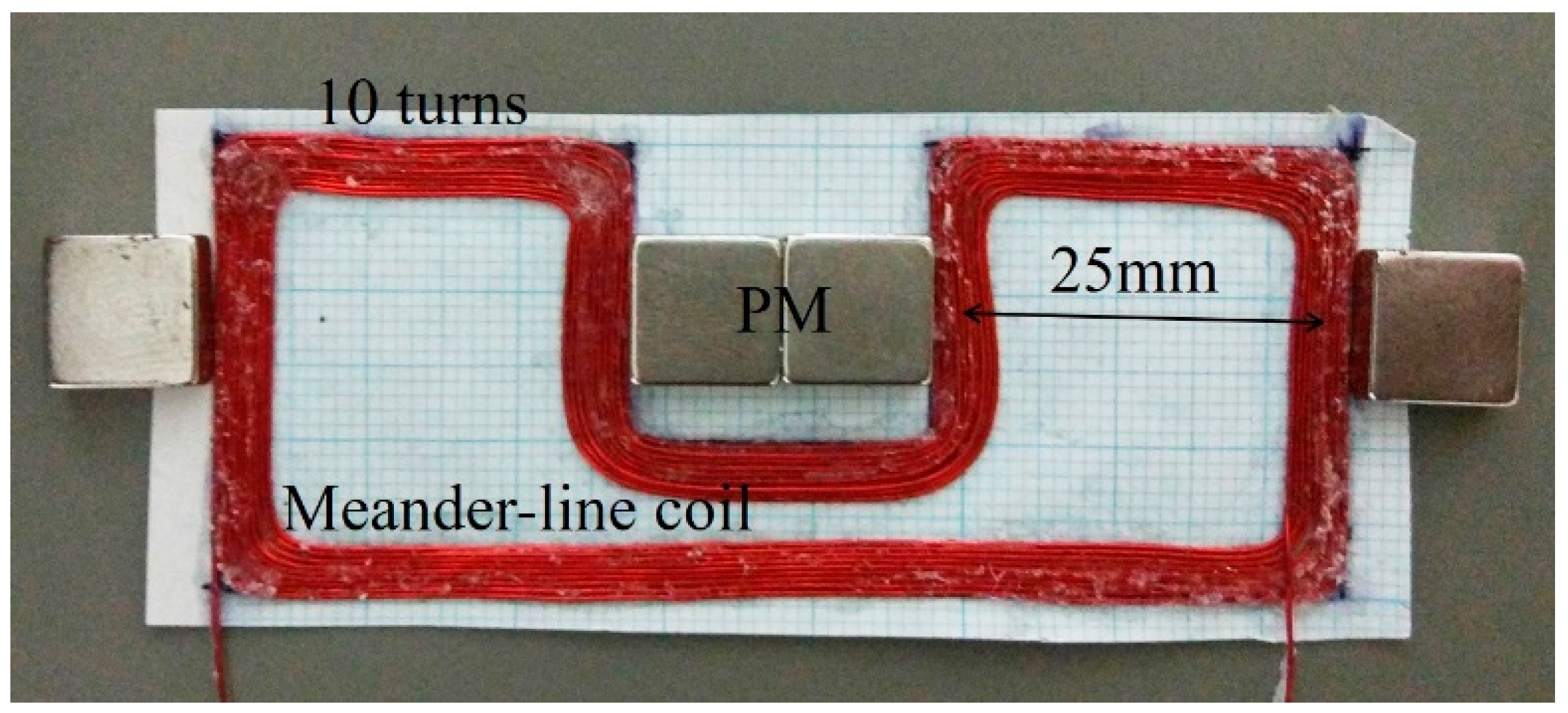
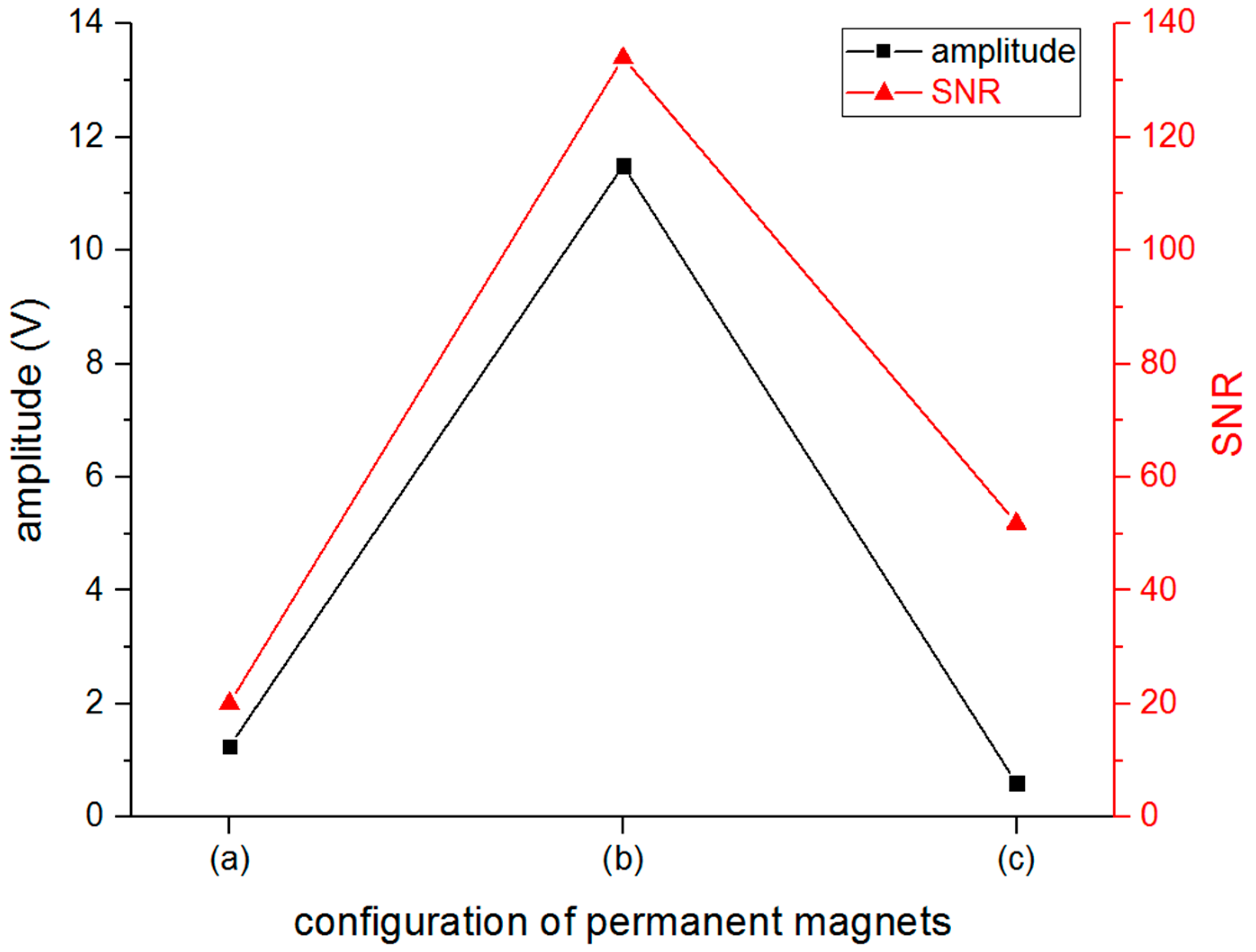
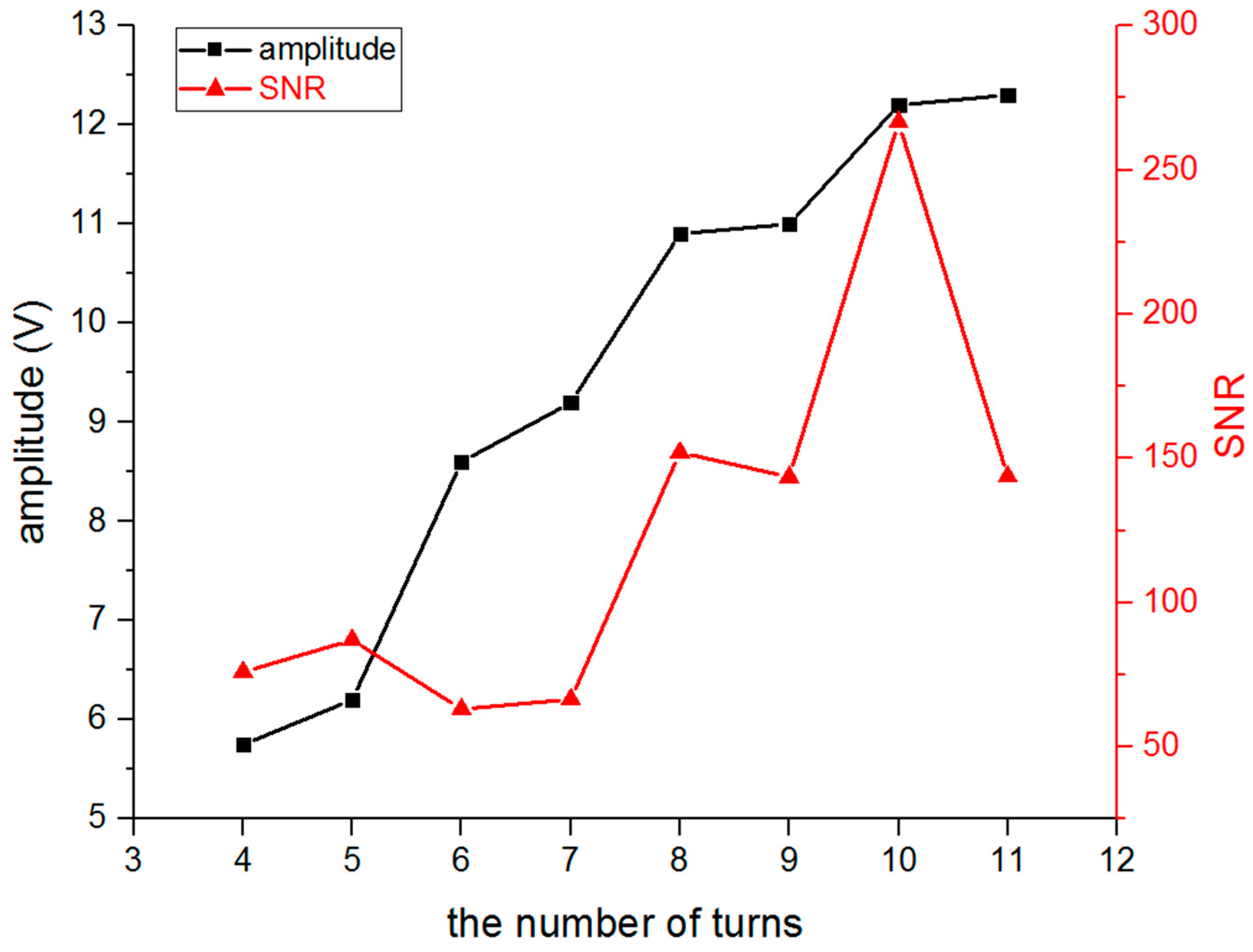
4.1. Meander-Line Coil EMAT for S0 Mode Wave
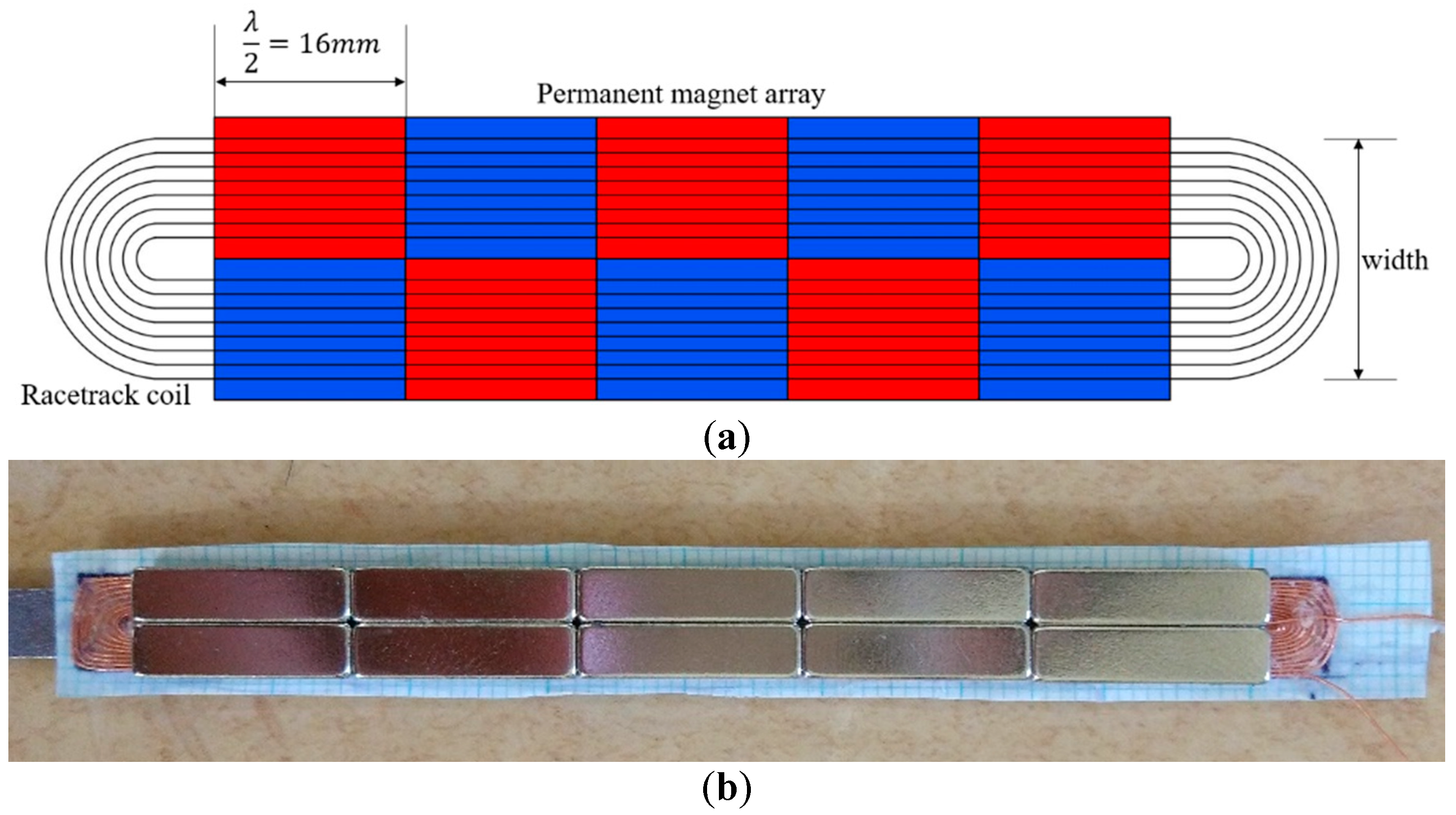
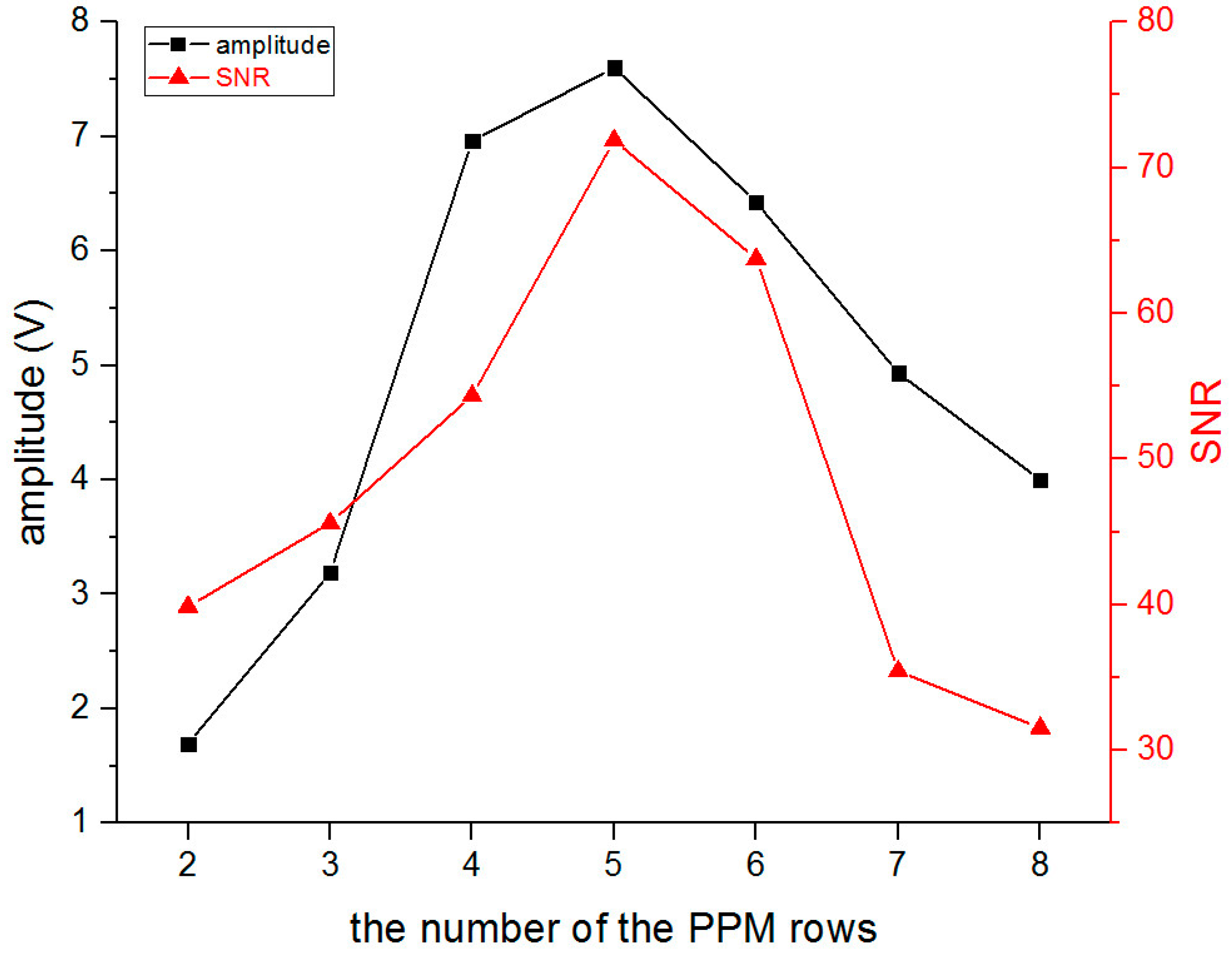
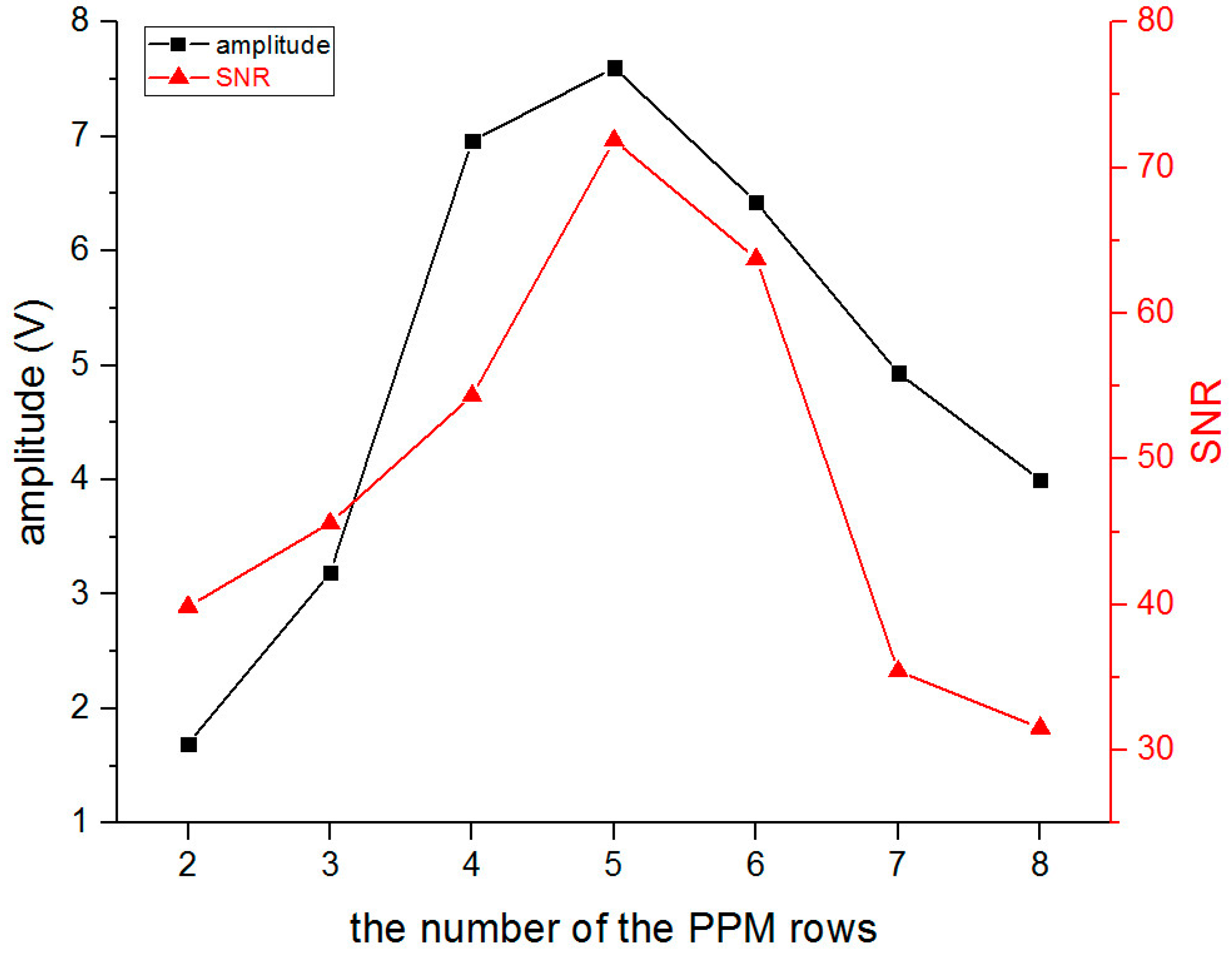
4.2. PPM EMAT for SH0-Mode Wave
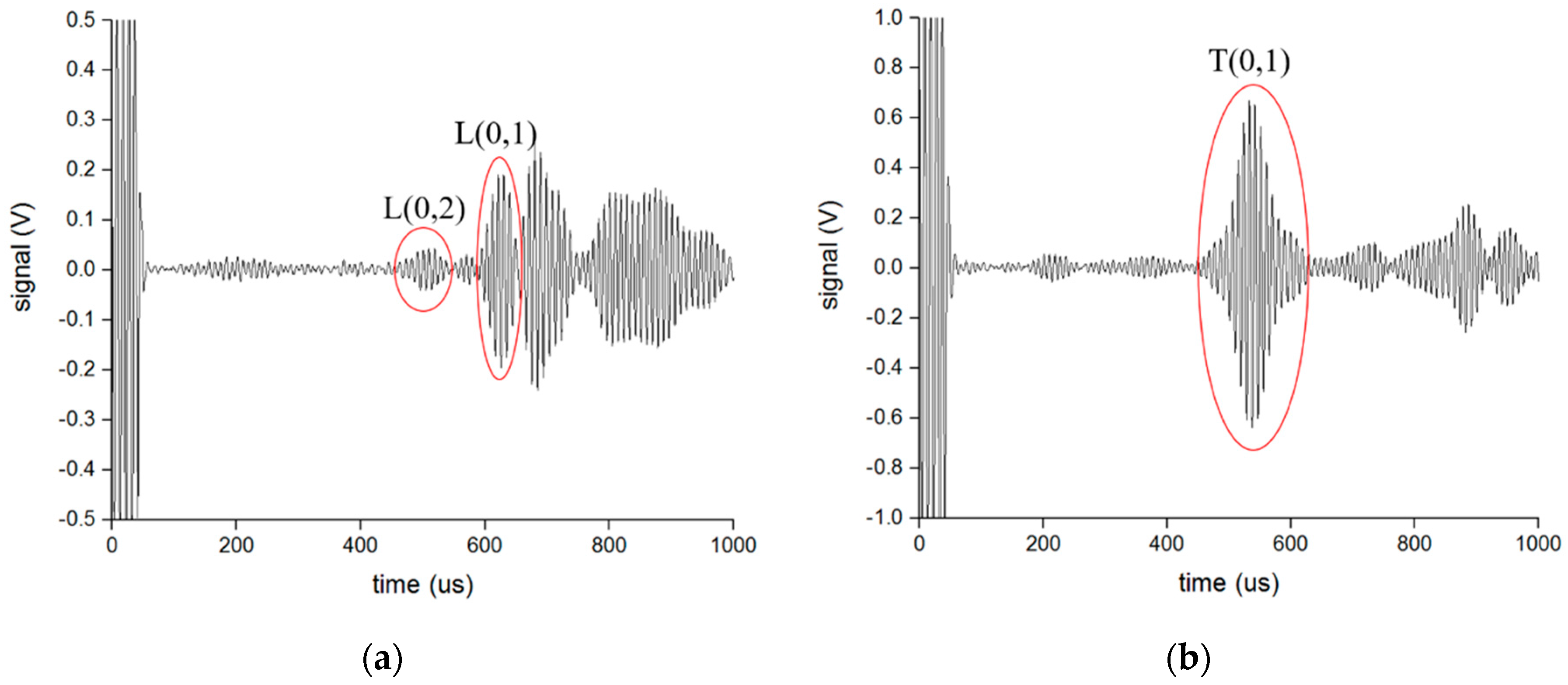
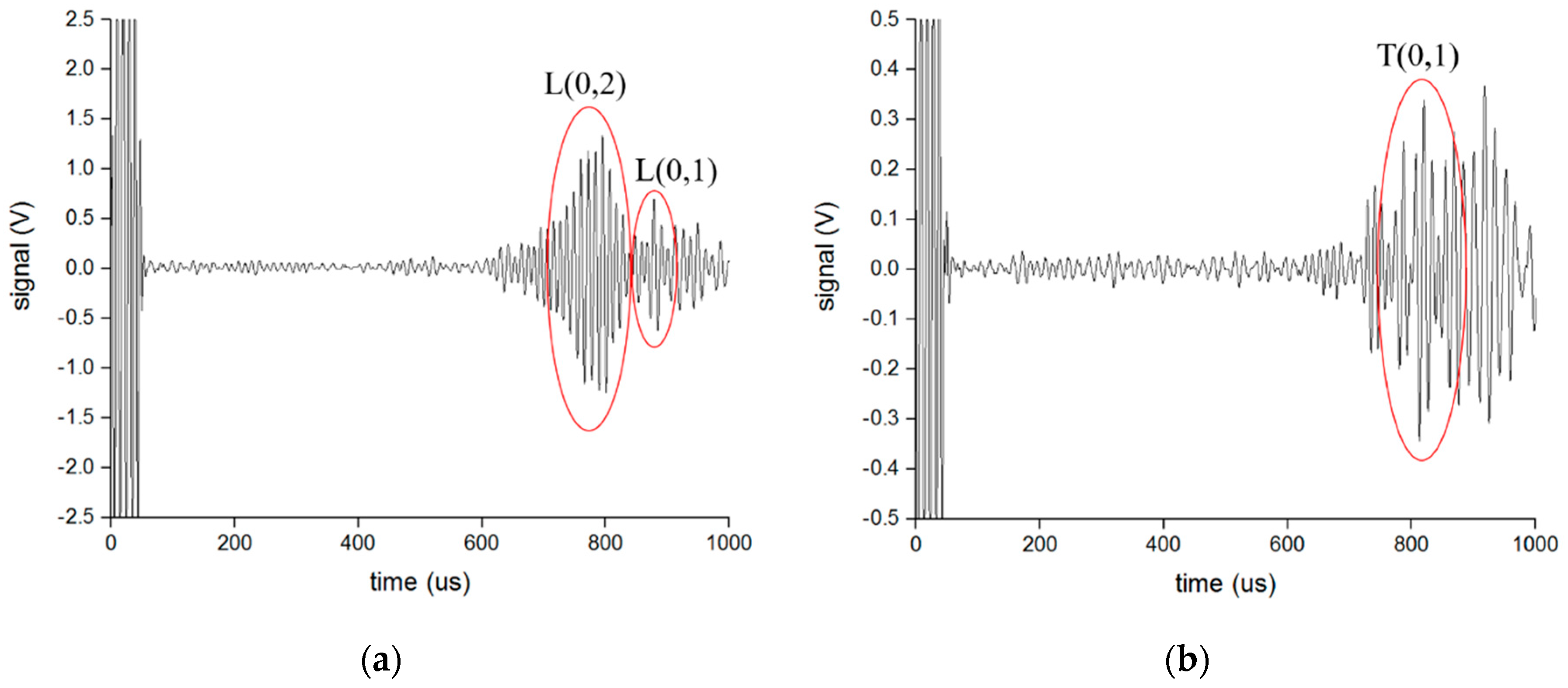
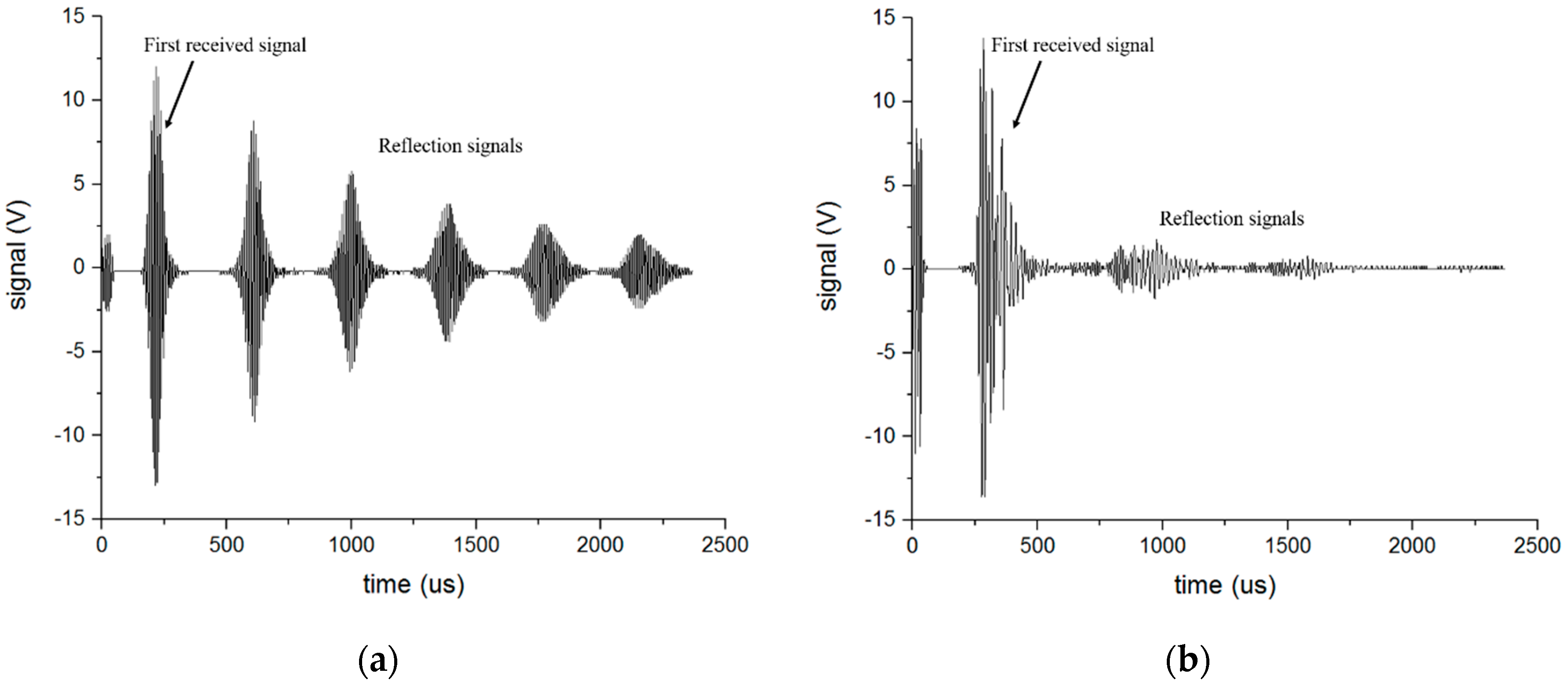
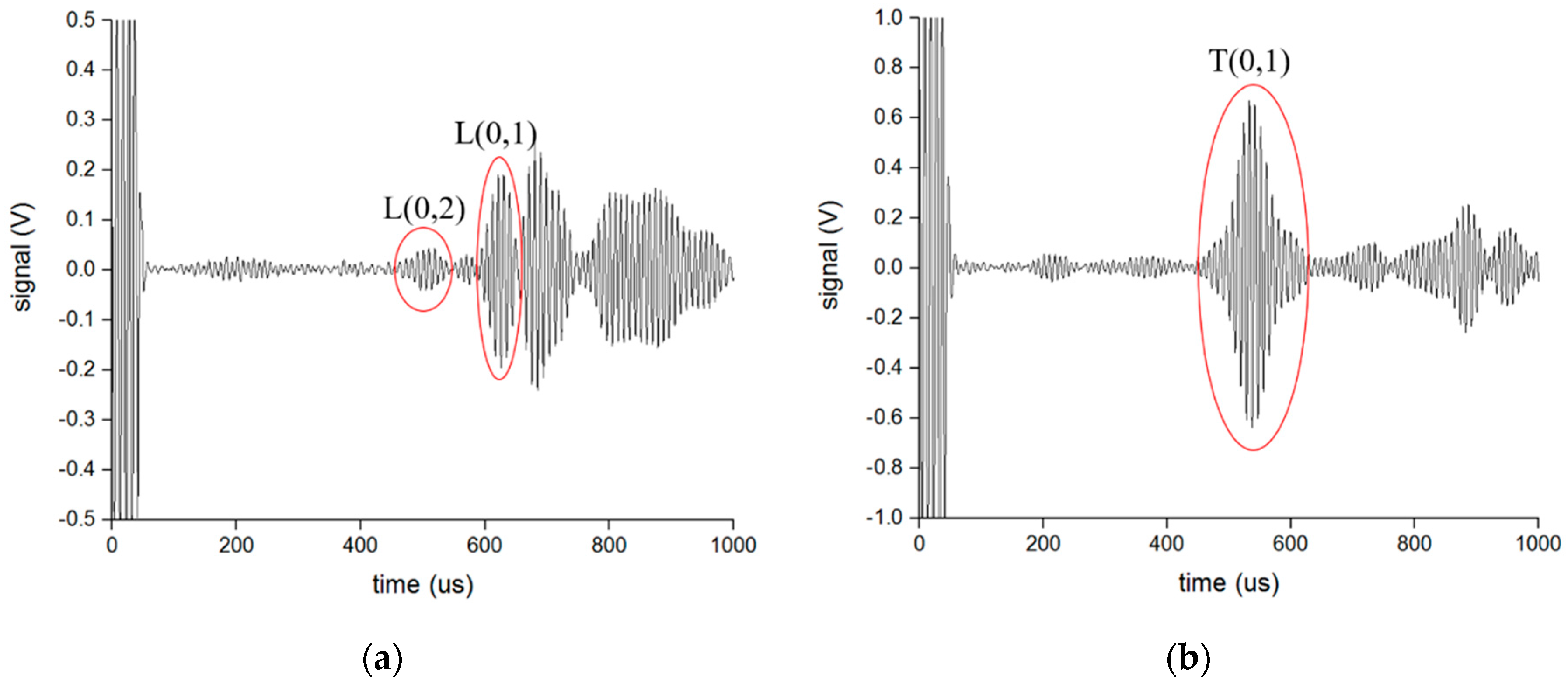
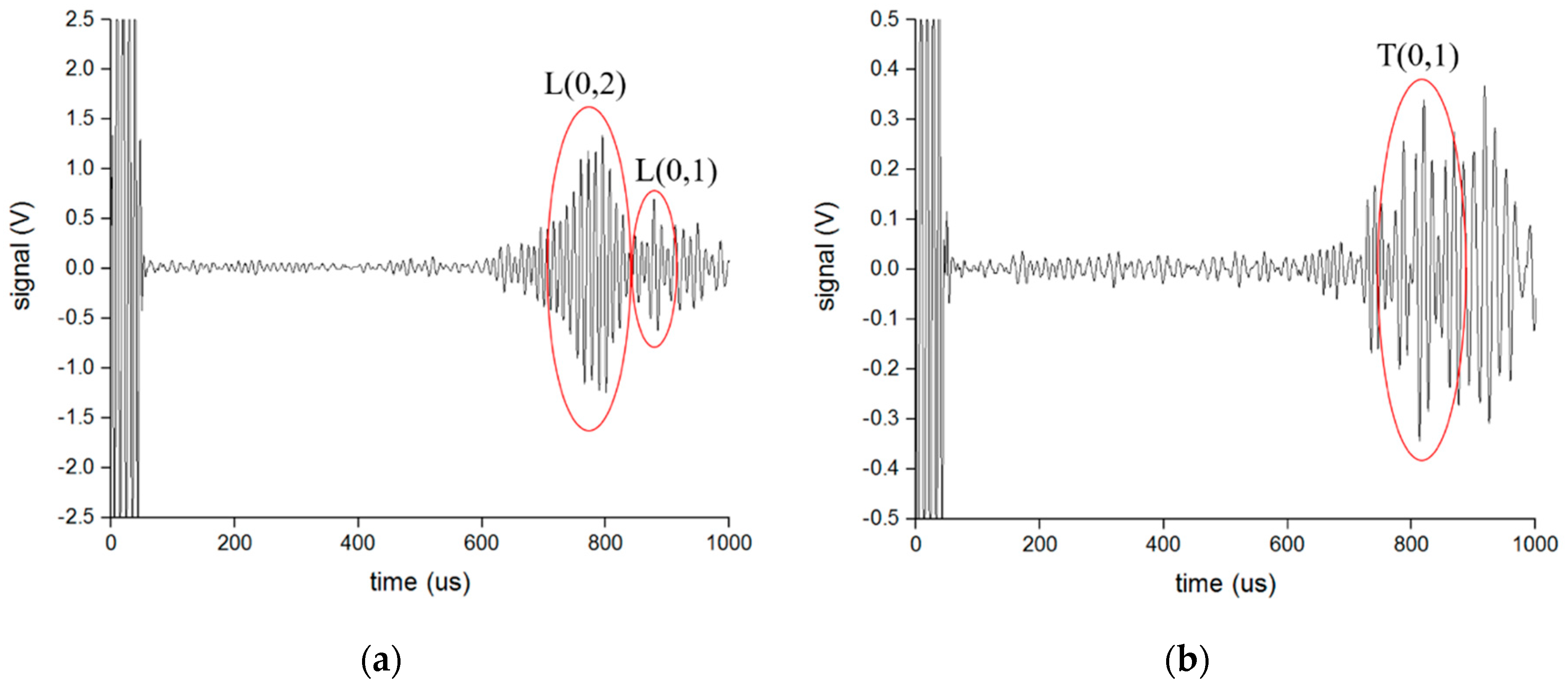
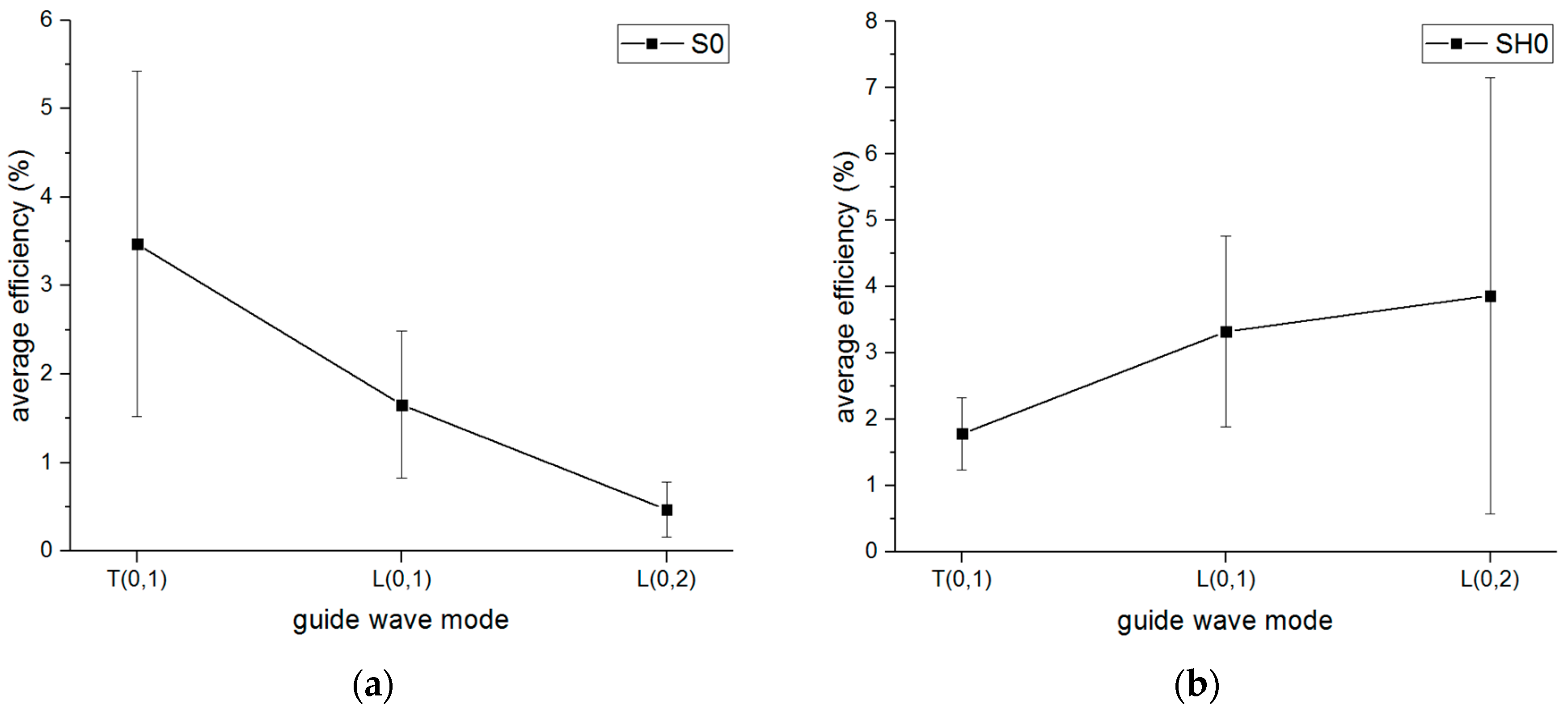
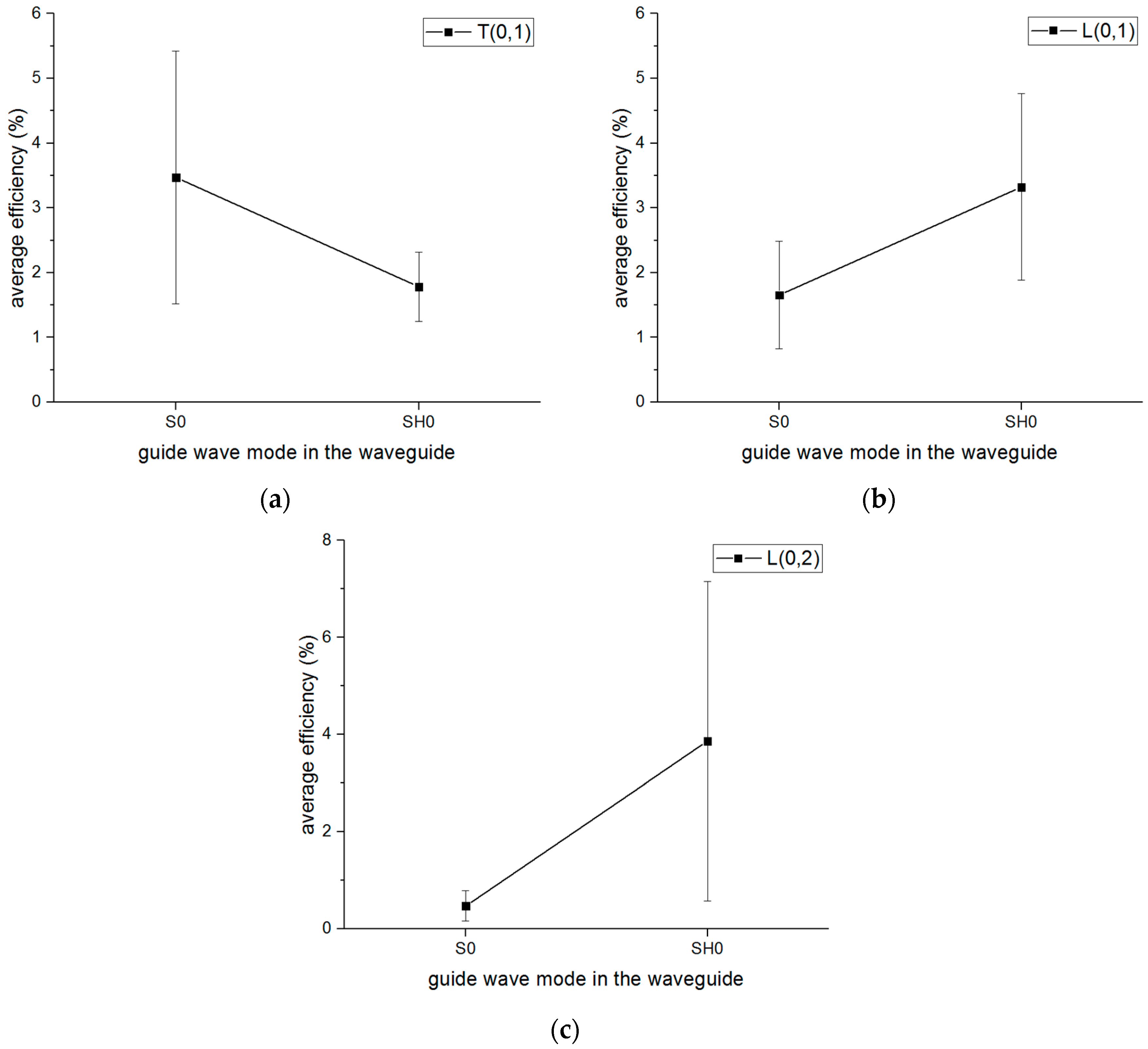
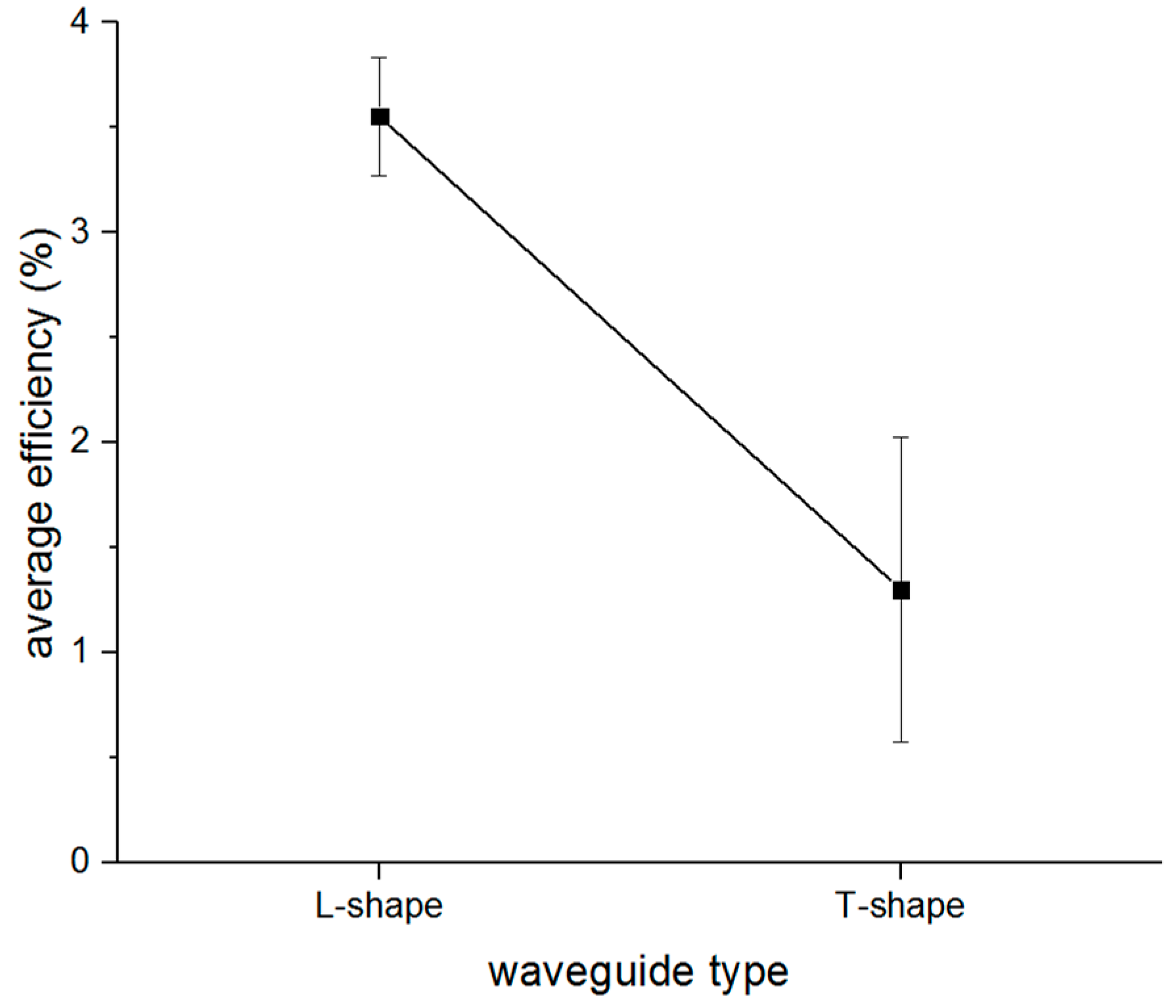
5. Experiment to Detect a Guided Wave into the Pipe Using the S0 and SH0 Waves
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Burrows, S.E.; Fan, Y.; Dixon, S. High temperature thickness measurements of stainless steel and low carbon steel using electromagnetic acoustic transducers. NDT E Int. 2014, 68, 73–77. [Google Scholar] [CrossRef]
- Liu, Z.; Hu, Y.; Fan, J. Longitudinal mode magnetostrictive patch transducer array employing a multi-splitting meander coil for pipe inspection. NDT E Int. 2016, 79, 30–37. [Google Scholar] [CrossRef]
- Duan, W.; Kirby, R. A numerical model for the scattering of elastic waves from a non-axisymmetric defect in a pipe. Finite Elem. Anal. Des. 2015, 100, 28–40. [Google Scholar] [CrossRef]
- Willey, C.L.; Simonetti, F.; Nagy, P.B. Guided wave tomography of pipes with high-order helical modes. NDT E Int. 2014, 65, 8–21. [Google Scholar] [CrossRef]
- Nagy, P.B.; Simonetti, F.; Instanes, G. Corrosion and erosion monitoring in plates and pipes using constant group velocity Lamb wave inspection. Ultrasonics 2014, 54, 1832–1841. [Google Scholar] [CrossRef] [PubMed]
- Leinov, E.; Lowe, M.J.S.; Cawley, P. Ultrasonic isolation of buried pipes. J. Sound Vib. 2016, 363, 225–239. [Google Scholar] [CrossRef]
- Cegla, F.B.; Jarvis, A.J.C.; Davies, J.O. High-temperature ultrasonic crack monitoring using SH waves. NDT E Int. 2011, 44, 669–679. [Google Scholar] [CrossRef]
- Cegla, F.B.; Cawley, P.; Allin, J. High-temperature (>500 °C) wall thickness monitoring using dry-coupled ultrasonic waveguide transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 156–167. [Google Scholar] [CrossRef] [PubMed]
- Murayama, R.; Kobayashi, M.; Matsumoto, K. Ultrasonic Inspection System Using a Long Waveguide with an Acoustic Horn for High-Temperature Structure. J. Sens. Technol. 2014, 4, 177–185. [Google Scholar] [CrossRef]
- Hernandez-Valle, F.; Dixon, S. Preliminary tests to design an EMAT with pulsed electromagnet for high temperature. Am. Inst. Phys. 2009, 1096, 936–941. [Google Scholar]
- Hernandez-Valle, F.; Dixon, S. Initial tests for designing a high temperature EMAT with pulsed electromagnet. NDT E Int. 2010, 43, 171–175. [Google Scholar] [CrossRef]
- Tian, G.Y.; Sophian, A. Reduction of lift-off effects for pulsed eddy current NDT. NDT E Int. 2005, 38, 319–324. [Google Scholar] [CrossRef]
- Huang, S.; Zhao, W.; Zhang, Y. Study on the lift-off effect of EMAT. Sens. Actuators A Phys. 2009, 153, 218–221. [Google Scholar] [CrossRef]
- Yu, Y.; Yan, Y.; Wang, F. An approach to reduce lift-off noise in pulsed eddy current nondestructive technology. NDT E Int. 2014, 63, 1–6. [Google Scholar] [CrossRef]
- Morrison, J.P.; Dixon, S.; Potter, M.D.G. Lift-off compensation for improved accuracy in ultrasonic lamb wave velocity measurements using electromagnetic acoustic transducers (EMATs). Ultrasonics 2006, 44, e1401–e1404. [Google Scholar] [CrossRef] [PubMed]
- Murayama, R.; Matsumoto, K.; Ushitani, K. Pipe Inspection System by Guide Wave Using a Long Distance Waveguide. Mod. Mech. Eng. 2015, 5, 139–149. [Google Scholar] [CrossRef]
- Lee, H.; Park, H.W.; Sohn, H. Pipe Defect Visualization and Quantification Using Longitudinal Ultrasonic Modes. Int. J. Struct. Stab. Dyn. 2014, 14, 1440008. [Google Scholar] [CrossRef]
- Murayama, R.; Weng, J.; Kobayashi, M. Pipe inspection system of a pipe by three-modes guide wave using polarized-transverse wave EMATs. Proc. SPIE 2014, 9302, 93022T. [Google Scholar] [CrossRef]
- Xu, J.; Wu, X.; Kong, D. A Guided Wave Sensor Based on the Inverse Magnetostrictive Effect for Distinguishing Symmetric from Asymmetric Features in Pipes. Sensors 2015, 15, 5151–5162. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.M.; Zhao, Y.Z.; Shi, Y.W. Calculation for lamb wave dispersion curves. Nondestr. Test. 2003, 25, 66–68. [Google Scholar]
- Xu, X.N.; Yu, Z.J.; Zhu, L.Q. A graphical method to solve a dispersion equation of Lamb wave. J. Electron. Meas. Instrum. 2012, 11, 9. [Google Scholar] [CrossRef]
- Lowe, M.J.S.; Alleyne, D.N.; Cawley, P. Defect detection in pipes using guided waves. Ultrasonics 1998, 36, 147–154. [Google Scholar] [CrossRef]
- Murayama, R.; Makiyama, S.; Kodama, M. Development of an ultrasonic inspection robot using an electromagnetic acoustic transducer for a Lamb wave and an SH-plate wave. Ultrasonics 2004, 42, 825–829. [Google Scholar] [CrossRef] [PubMed]
- Petcher, P.A.; Burrows, S.E.; Dixon, S. Shear horizontaL(SH) ultrasound wave propagation around smooth corners. Ultrasonics 2014, 54, 997–1004. [Google Scholar] [CrossRef] [PubMed]
- Murayama, R.; Mizutani, K. Conventional electromagnetic acoustic transducer development for optimum Lamb wave modes. Ultrasonics 2002, 40, 491–495. [Google Scholar] [CrossRef]
- Andruschak, N.; Saletes, I.; Filleter, T. An NDT guided wave technique for the identification of corrosion defects at support locations. NDT E Int. 2015, 75, 72–79. [Google Scholar] [CrossRef]
- Petcher, P.A.; Dixon, S. Weld defect detection using PPM EMAT generated shear horizontal ultrasound. NDT E Int. 2015, 74, 58–65. [Google Scholar] [CrossRef]
- Hill, S.; Dixon, S. Frequency dependent directivity of periodic permanent magnet electromagnetic acoustic transducers. NDT E Int. 2014, 62, 137–143. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Pipe | Waveguide (Plate) |
|---|---|---|
| Inner radius (width of plate)/mm | 18.195 | 10 |
| Thickness/mm | 3.22 | 0.6 |
| Velocity of shear wave/(m/s) | 3200 | 3200 |
| Velocity of longitudinal wave/(m/s) | 5940 | 5200 |
| Number of Turns | Capacitance/ | Inductance/ | Resistance/ | Impedance/ |
|---|---|---|---|---|
| 4 | 822.77 | 2.7921 | 289.45 | 1.7815 |
| 5 | 652.10 | 3.5233 | 318.75 | 2.3468 |
| 6 | 462.17 | 4.9716 | 386.84 | 3.3027 |
| 7 | 371.51 | 6.1839 | 439.51 | 4.1030 |
| 8 | 280.44 | 8.1950 | 506.31 | 5.4305 |
| 9 | 238.35 | 9.6395 | 533.51 | 6.3814 |
| 10 | 200.12 | 11.481 | 626.32 | 7.6005 |
| 11 | 176.87 | 12.989 | 656.48 | 8.5942 |
| Number of the PPM Rows | Capacitance/ | Inductance/ | Resistance/ | Impedance/ |
|---|---|---|---|---|
| 2 | 1305.3 | 1.9406 | 494.69 | 1.3159 |
| 3 | 859.75 | 2.9478 | 730.01 | 1.9891 |
| 4 | 734.08 | 3.4506 | 831.21 | 2.3216 |
| 5 | 584.11 | 4.3366 | 955.75 | 2.8874 |
| 6 | 503.73 | 5.0169 | 1156.0 | 3.3643 |
| 7 | 429.12 | 5.9027 | 1271.4 | 3.9403 |
| 8 | 370.45 | 6.8380 | 1445.7 | 4.5329 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, F.; Sun, Z.; Chen, Q.; Murayama, R.; Nishino, H. Mode Conversion Behavior of Guided Wave in a Pipe Inspection System Based on a Long Waveguide. Sensors 2016, 16, 1737. https://doi.org/10.3390/s16101737
Sun F, Sun Z, Chen Q, Murayama R, Nishino H. Mode Conversion Behavior of Guided Wave in a Pipe Inspection System Based on a Long Waveguide. Sensors. 2016; 16(10):1737. https://doi.org/10.3390/s16101737
Chicago/Turabian StyleSun, Feiran, Zhenguo Sun, Qiang Chen, Riichi Murayama, and Hideo Nishino. 2016. "Mode Conversion Behavior of Guided Wave in a Pipe Inspection System Based on a Long Waveguide" Sensors 16, no. 10: 1737. https://doi.org/10.3390/s16101737
APA StyleSun, F., Sun, Z., Chen, Q., Murayama, R., & Nishino, H. (2016). Mode Conversion Behavior of Guided Wave in a Pipe Inspection System Based on a Long Waveguide. Sensors, 16(10), 1737. https://doi.org/10.3390/s16101737