
Mapping Urban Environmental Noise Using Smartphones

Abstract
:1. Introduction
- The calibration of smartphones used to measure noise requires some operations, which may lead to a high volume of workload when the number of phones increases.
- In these studies, the volunteers should always carry the phones in their hands because putting the phones in their trouser pockets, bags, or belt pouches may result in large errors, which would be ineffective in long-term data collection.
- Because infinitely increasing the spatial density of measurements is impossible, a suitable interpolation method is needed to map noise. Owing to the spatial heterogeneity of noise distribution, the spatial interpolation method may be influenced by this heterogeneity. However, none of these works tried to solve this influence.
2. Methods
2.1. Skeleton
2.2. Measuring Noise
2.2.1. Additional Microphone
2.2.2. A-Weighted Equivalent Continuous Sound Pressure Level
2.2.3. Calibration
- Step 1:
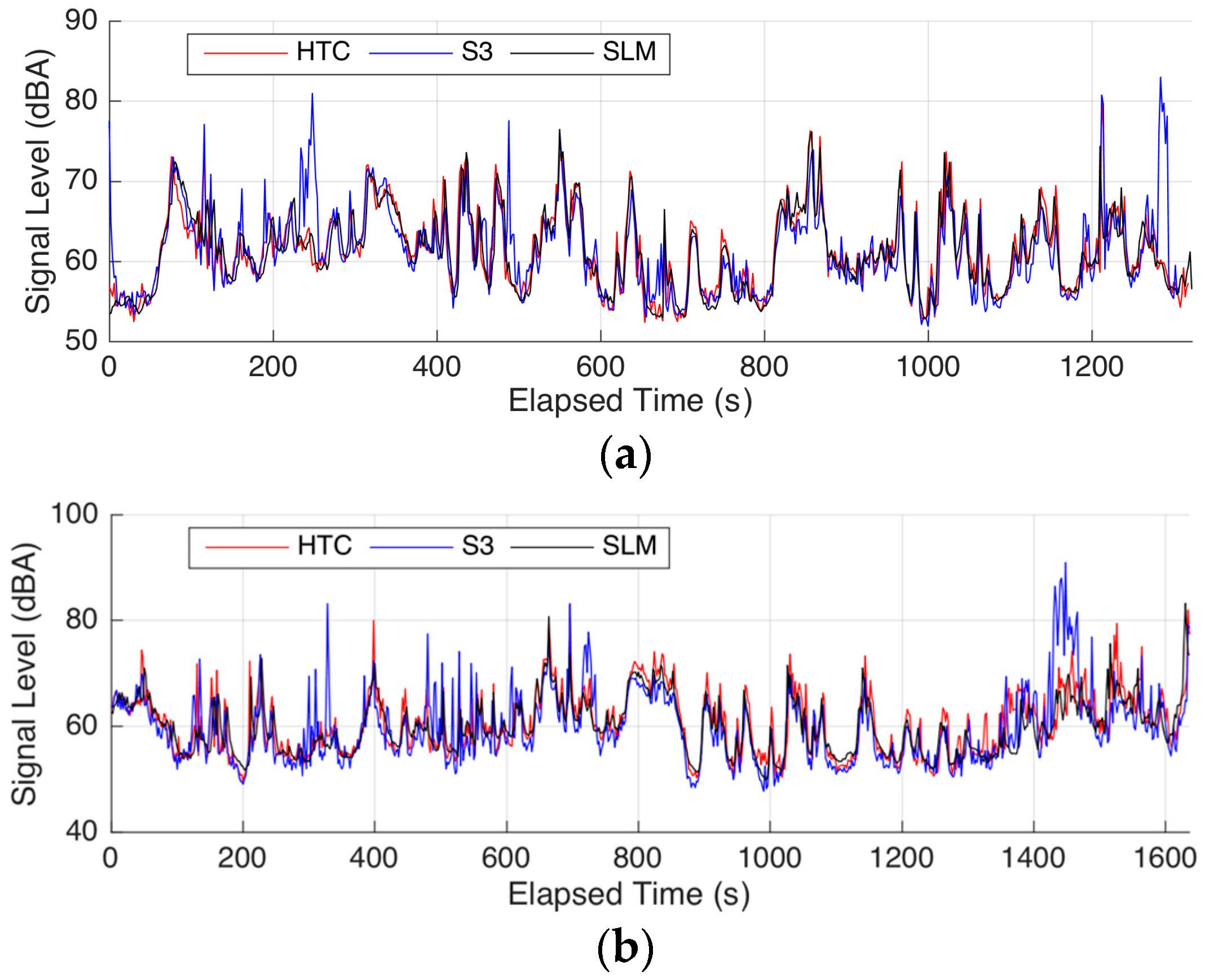
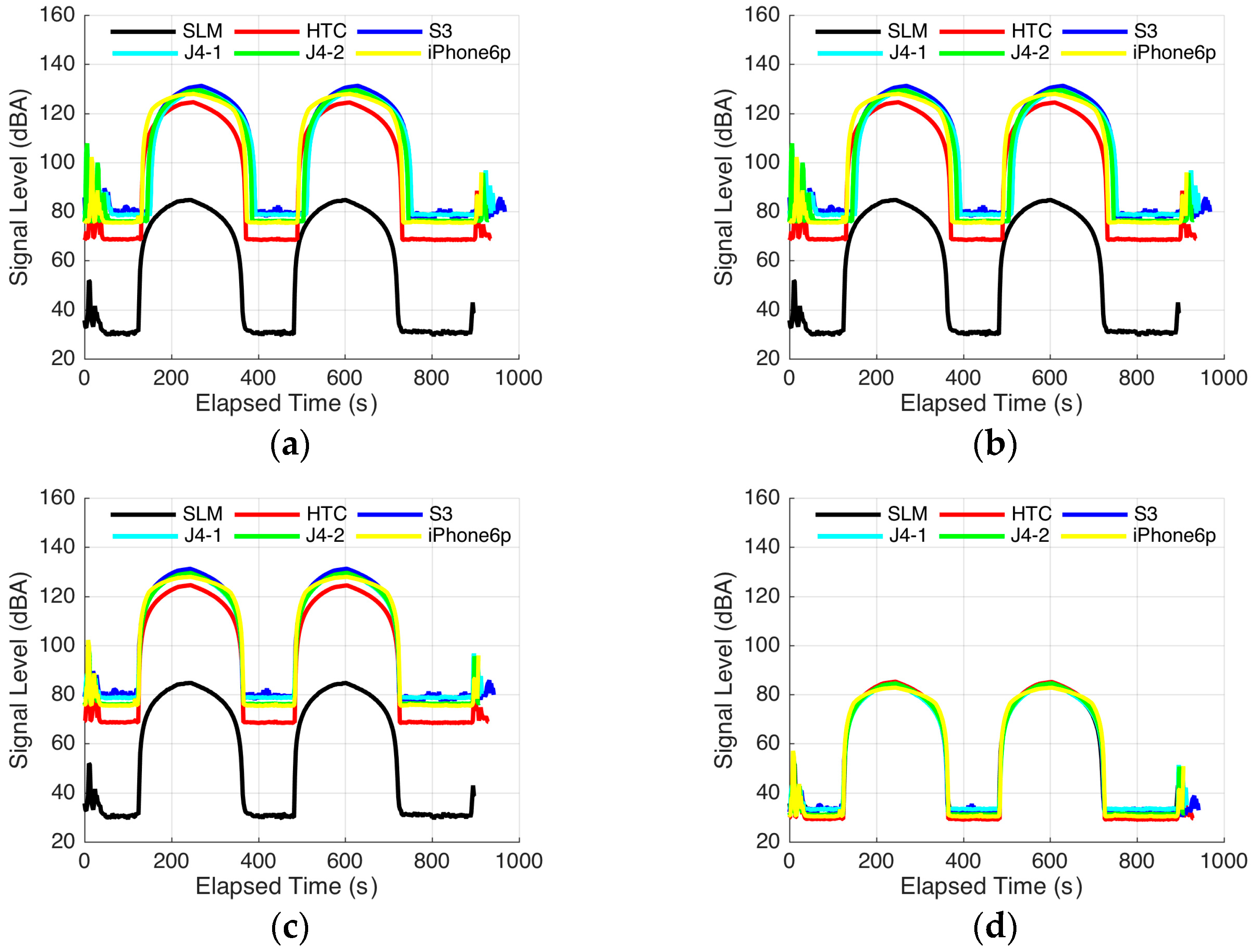
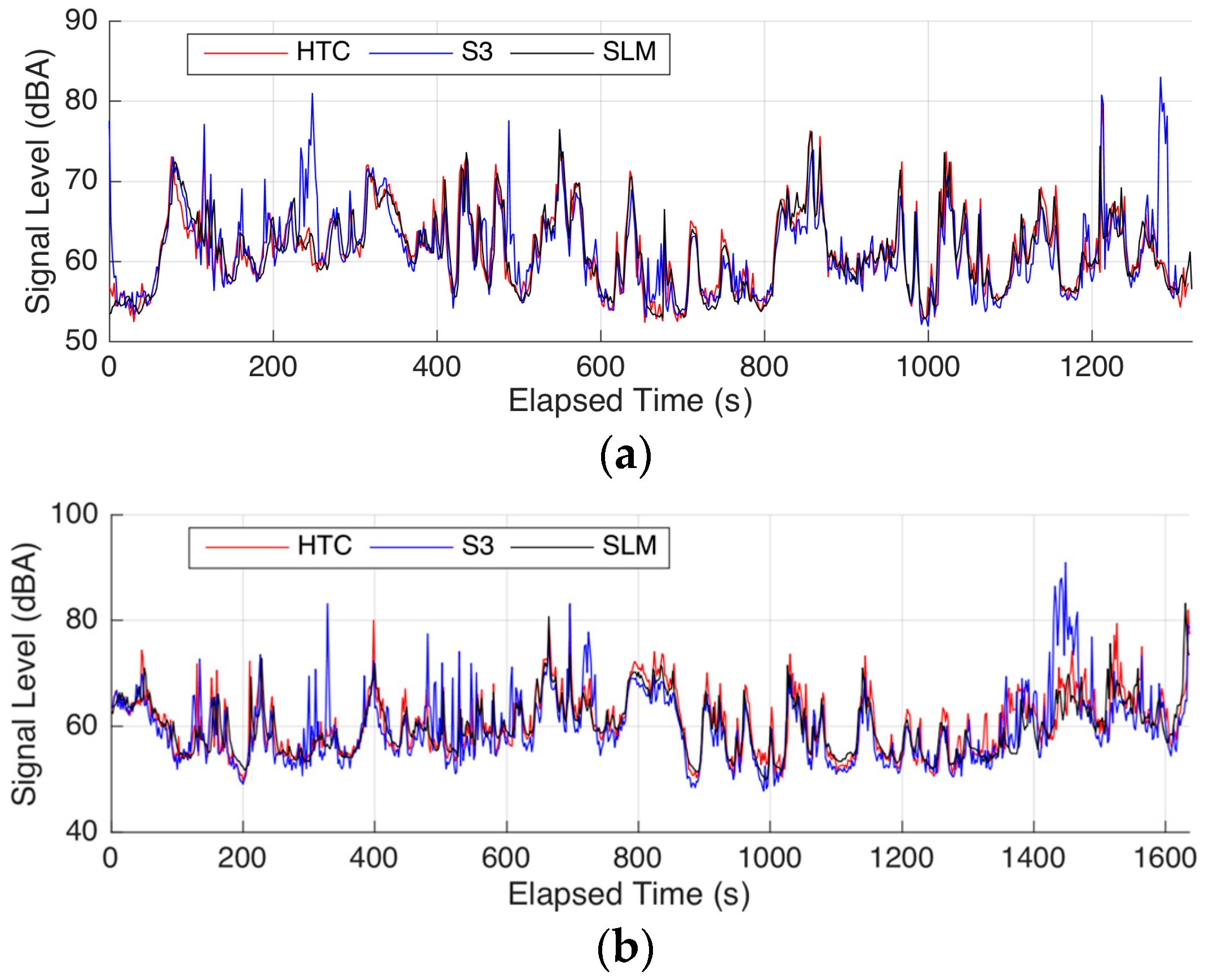
- Data recording. In a quiet room, while the calibration tone is being played, the sound pressure level [expressed in A-weighted decibel (dBA) unit] is recorded by the SLM and mobile phones. After this process has started, the operator leaves the room to prevent his actions or breathing from being recorded. Figure 2a shows that the segments with peaks are sinusoidal tones, and the duration between them represents silence. The data are recorded every 2 s.
- Step 2:
- Resampling. Because of the limitation of the SLM, we cannot substantially increase the sampling rate. As mentioned in the previous step, 2 s is selected. To improve the alignment precision in the follow-up step, as shown in Figure 2b, we employ 20 times the rate of the original signal for resampling by considering the balance between precision and computing load.
- Step 3:
- Time-series alignment. The calibration of the phones requires manual pressing of the buttons of the SLM or the mobile software to start the data recording. Simultaneously pressing the buttons of the different devices requires different processes, especially for products such as the CEM DT-8852 SLM. An unaligned time series will reduce calibration precision; thus, we need to align these data using algorithms. First, the correlation coefficients at each indentation between the resampled time series from the SLM and that from the phones are calculated. Then, we choose the indentation with the maximum correlation coefficient as a standard to translate the time series of the phones. In this manner, aligned time series are obtained, as shown in Figure 2c.
- Step 4:
- Calculating offsets. The duration of the calibration tone is 10 min. To obtain a complete time series, we need to start the recording before the tone is played and stop the recording for a period of time after completion. The pressing of the buttons of the SLM or mobile software by the operator and his other actions will be recorded during the time the tone is not played. To remove the noise from these actions, we introduce a sliding time window. The length of the window is the same as that of the tone (10 min). After calculating the means and standard deviations of the difference between the measurements of the sound pressure level by the SLM and the phones in the time window in each indentation, we choose the mean with the minimum standard deviation as offset C to compensate the measurements of each individual phone. Through this process, we can remove the noise caused by the operator and can calibrate the phones. The time-series compensated offset is shown in Figure 2d.
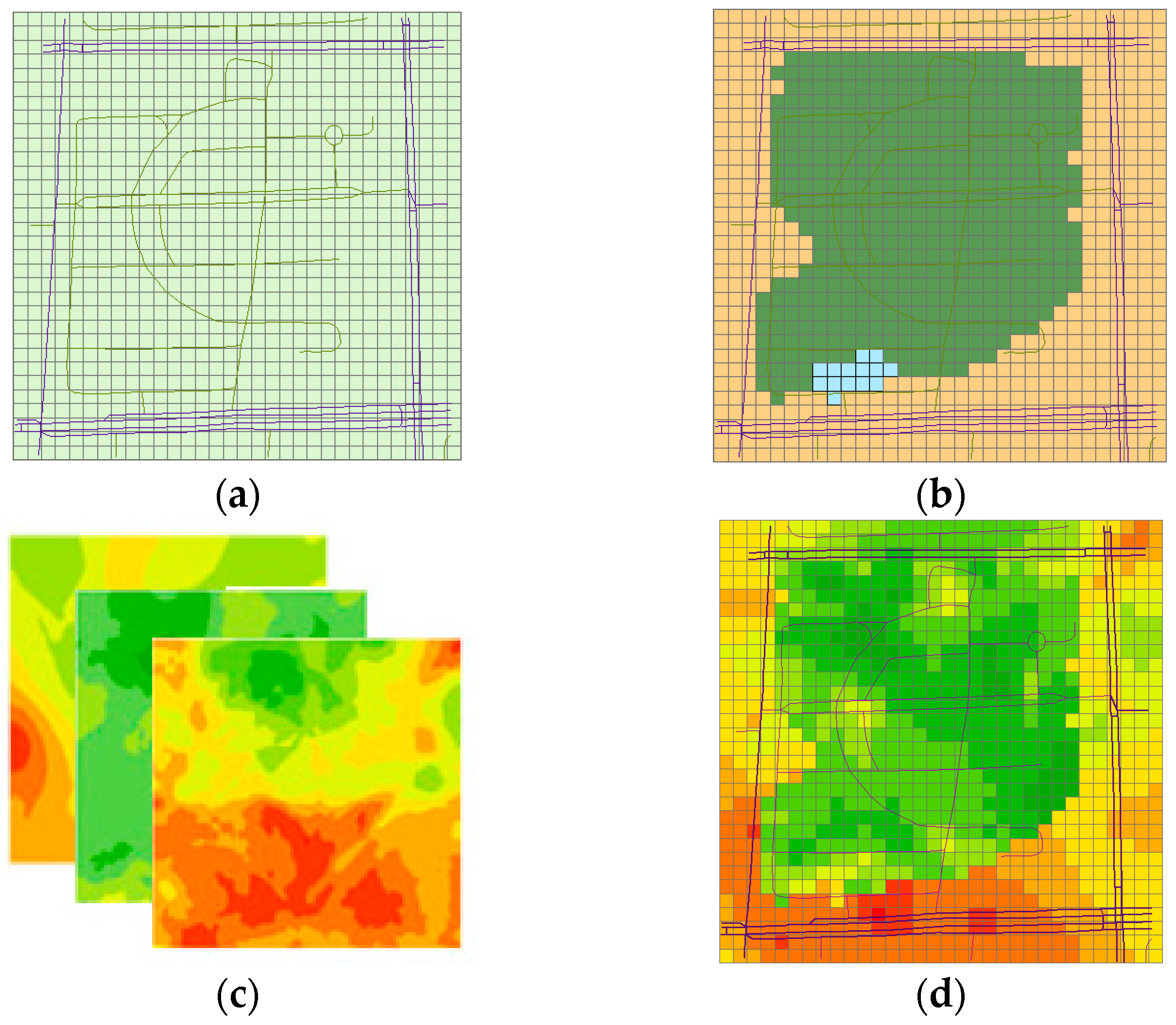
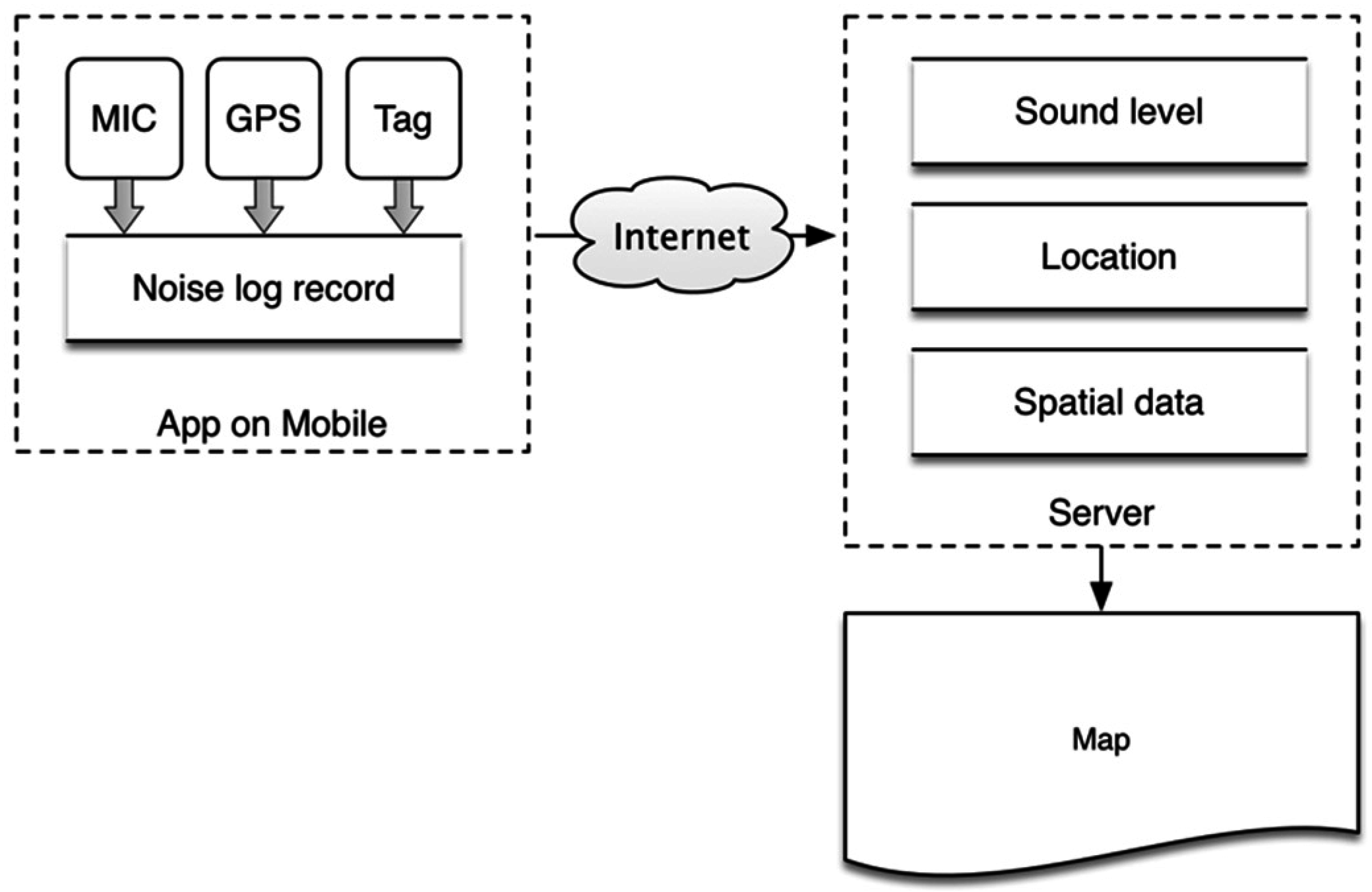
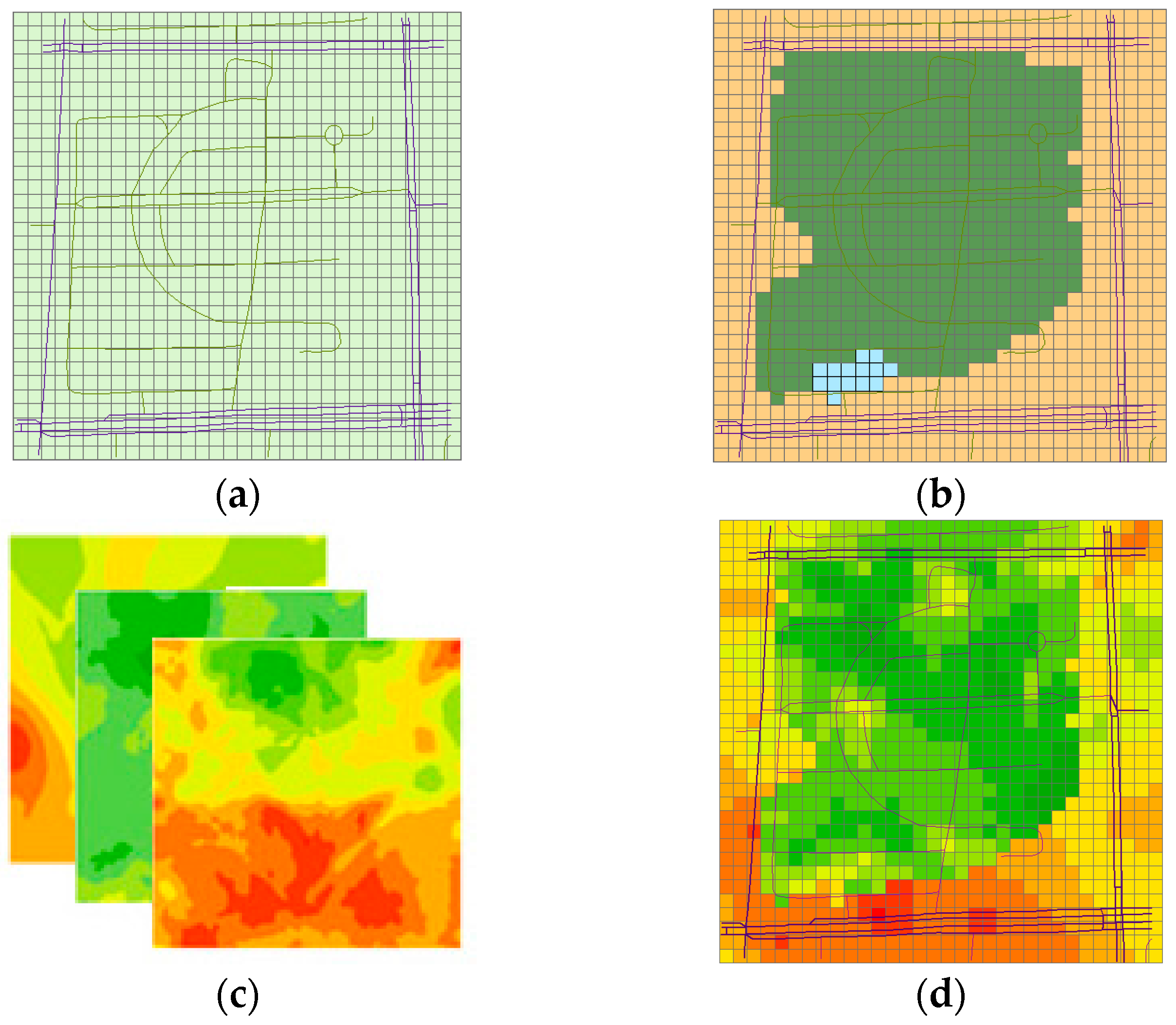
2.3. Noise Mapping
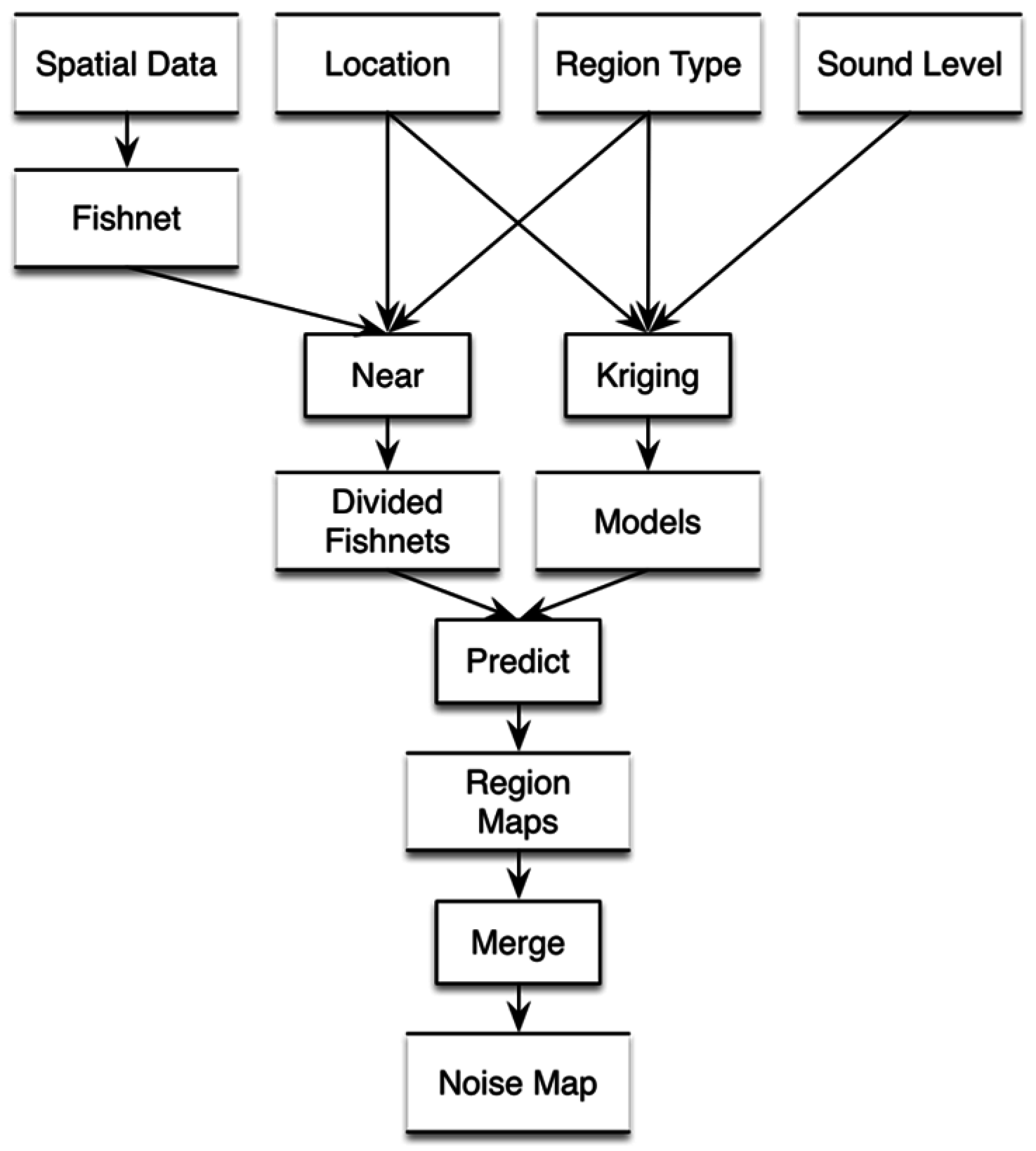
- Step 1:
- Create fishnet (grids) according to the extent of the experimental field. As is shown in Figure 4a.
- Step 2:
- Compute the nearest measurement for each grid and classify the grid into different types according to the label of the measurement (tagged by the volunteers). As is shown in Figure 4b.
- Step 3:
- Establish the spatial interpolation models of the noise for different region types. As is shown in Figure 4c.
- Step 4:
- Predict the sound level for the different region types based on the models established from the last step and create the noise maps for each type.
- Step 5:
- Combine the noise maps of the different region types to generate the noise map of the whole experimental field. As is shown in Figure 4d.
3. Experiment
3.1. Devices and Software
3.2. Experimental Field
3.3. Experimental Process
4. Results and Discussion
4.1. Noise Measurement
4.1.1. Calibration and Measurement Precision
- The differences in measurements between HTC, S3, J4-1, and SLM are relatively small; even the maximum difference is less than 1 dBA. We believe that these phones are suitable to carry out measurement of environmental noise.
- The differences in measurements between J4-2, iPhone 6p, and SLM are slightly large but are much better than those of the uncalibrated devices.
- Whereas J4-1 and J4-2 are of the same type and brand, differences exist in the calibration, which proves once again that independent calibration of each phone is necessary.
- Although HTC and S3 are equipped with additional microphones, no significant difference is observed compared with the other phones.
4.1.2. Additional Microphone
4.1.3. Effects of Wind and Movement
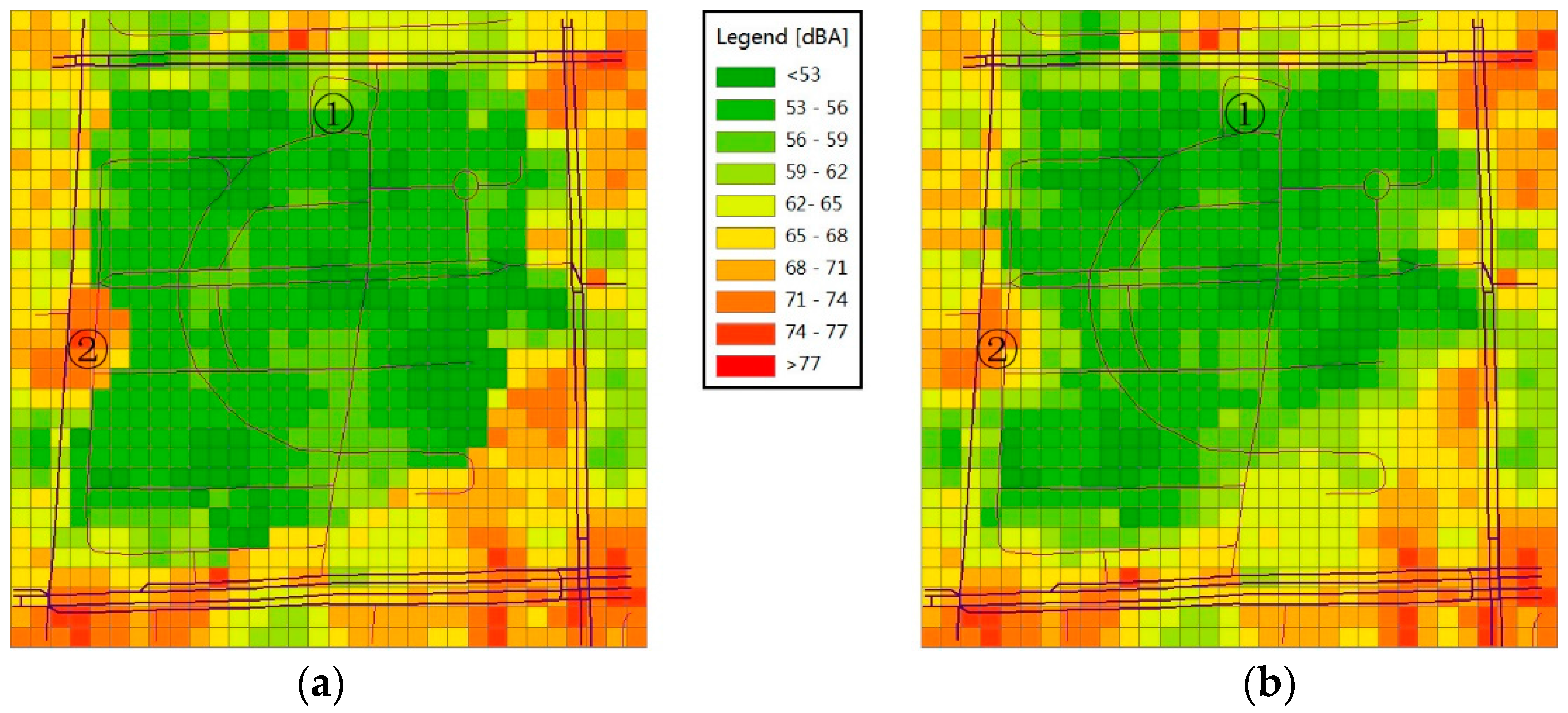
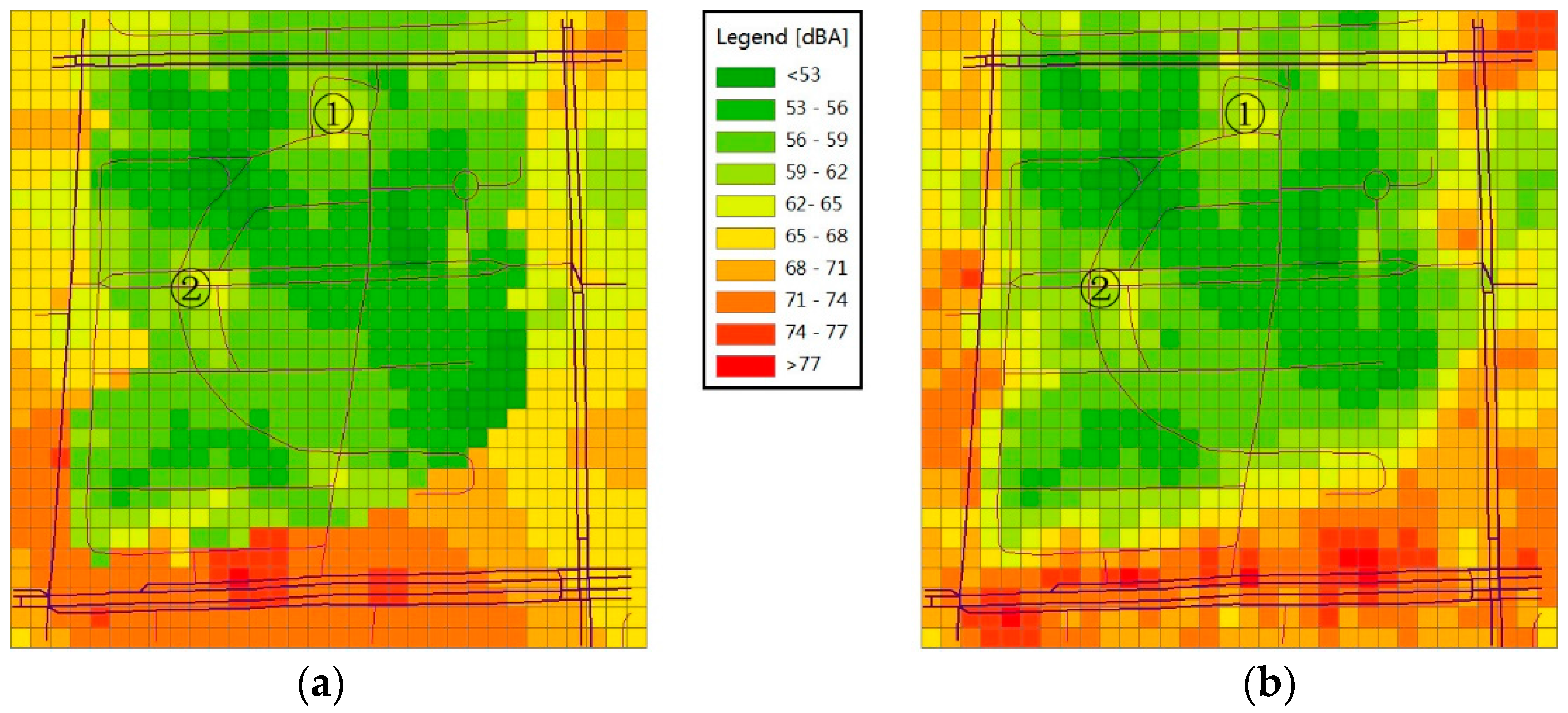
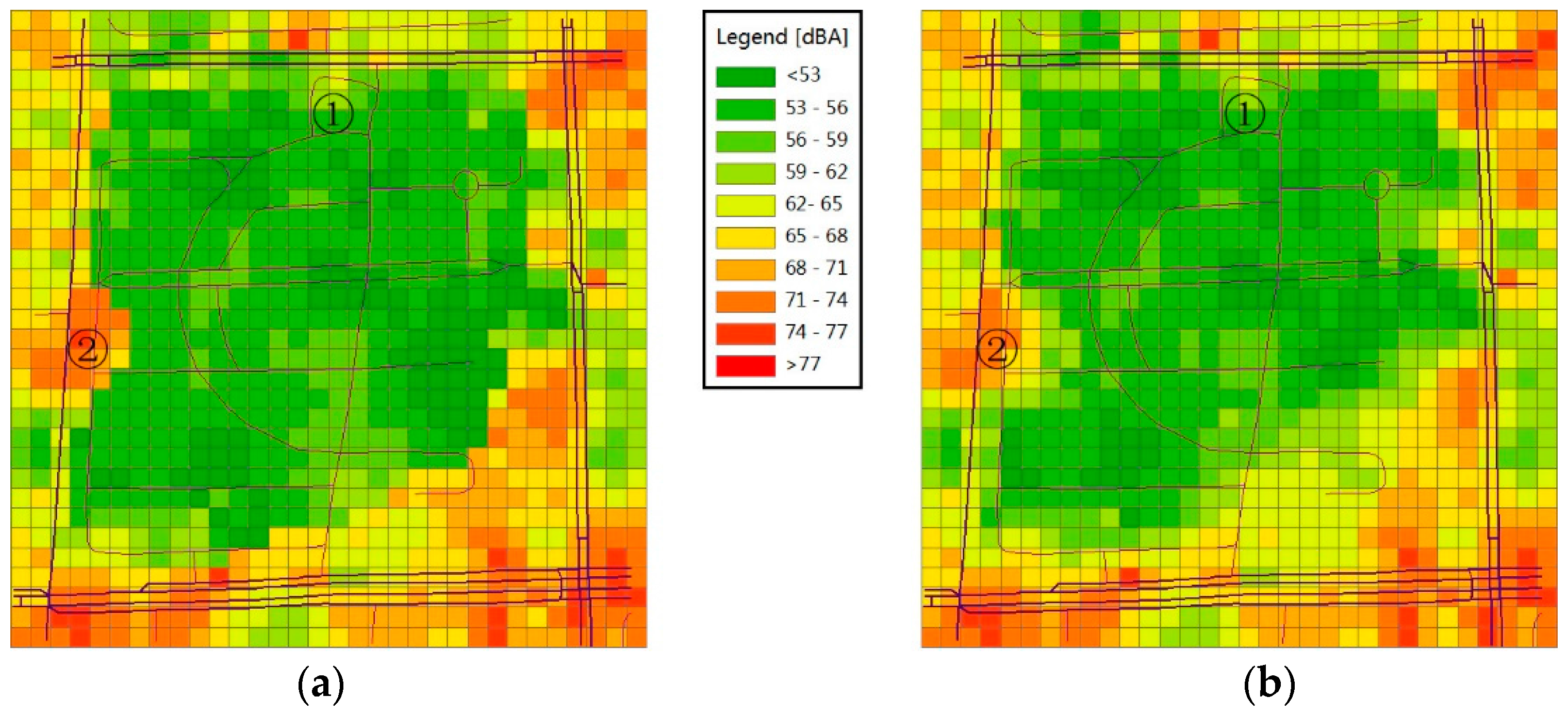
4.2. Noise Mapping
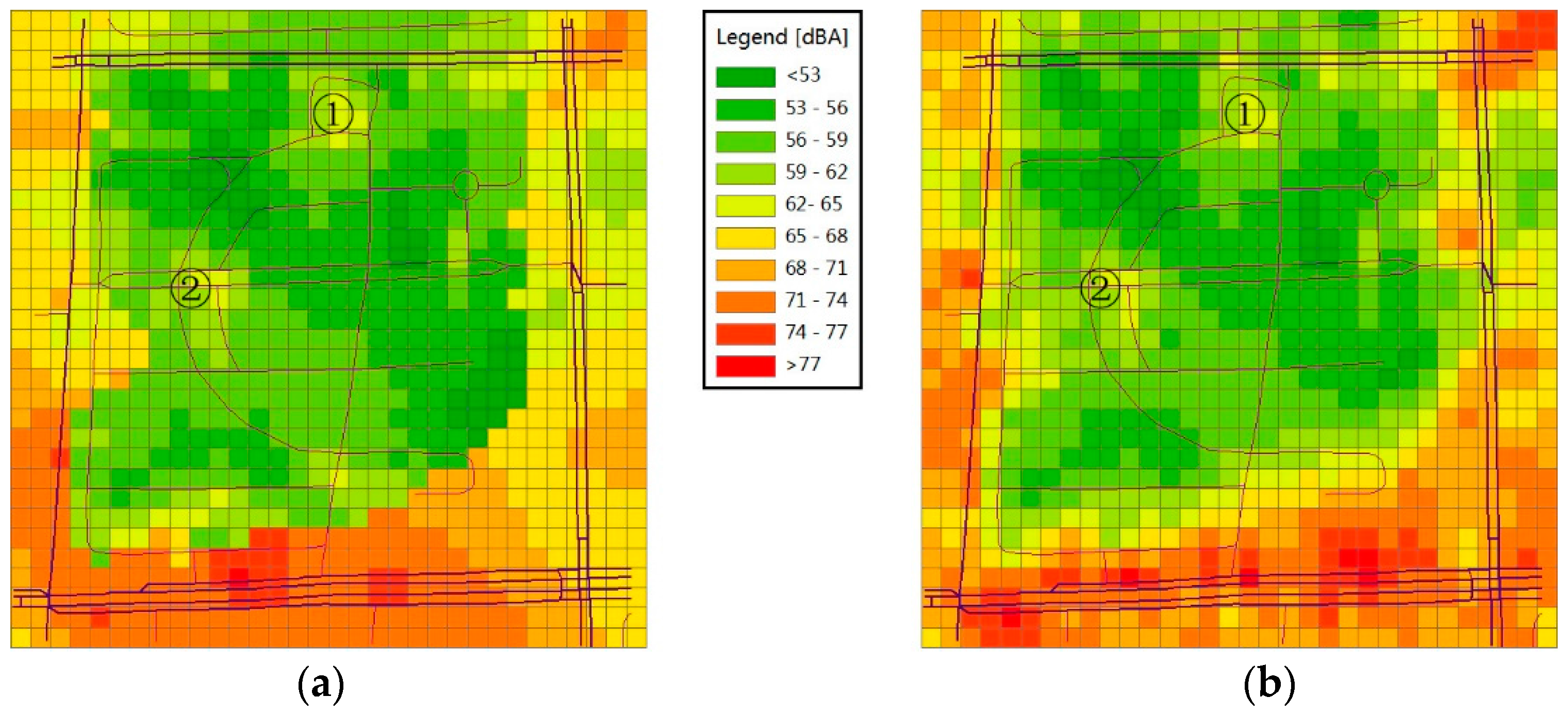
4.2.1. Noise Maps
4.2.2. Precision Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- European Environment Agency. Noise in Europe 2014; Publications Office of the European Union: Luxembourg, 2014. [Google Scholar]
- Lewis, R.C.; Gershon, R.R.M.; Neitzel, R.L. Estimation of permanent noise-induced hearing loss in an urban setting. Environ. Sci. Technol. 2013, 47, 6393–6399. [Google Scholar] [CrossRef] [PubMed]
- Hunashal, R.B.; Patil, Y.B. Assessment of noise pollution indices in the city of Kolhapur, India. Procedia Soc. Behav. Sci. 2012, 37, 448–457. [Google Scholar] [CrossRef]
- Ausejo, M.; Recuero, M.; Asensio, C.; Pavón, I.; López, J.M. Study of precision, deviations and uncertainty in the design of the strategic noise map of the macrocenter of the city of Buenos Aires, Argentina. Environ. Model. Assess. 2009, 15, 125–135. [Google Scholar] [CrossRef]
- Butler, D. Noise management: Sound and vision. Nature 2004, 427, 480–481. [Google Scholar] [CrossRef] [PubMed]
- Wing, L.C.; Kwan, L.C.; Kwong, T.M. Visualization of Complex Noise Environment by Virtual Reality Technologies; Environment Protection Department (EPD): Hong Kong, China, 2006.
- Tsai, K.-T.; Lin, M.-D.; Chen, Y.-H. Noise mapping in urban environments: A Taiwan study. Appl. Acoust. 2009, 70, 964–972. [Google Scholar] [CrossRef]
- Directive, E. Directive 2002/49/EC of the European parliament and the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Commun. 2002, L189, 12–26. [Google Scholar]
- Zheng, Y.; Liu, T.; Wang, Y.; Zhu, Y.; Liu, Y.; Chang, E. Diagnosing New York city’s noises with ubiquitous data. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 715–725.
- Aletta, F.; Kang, J. Soundscape approach integrating noise mapping techniques: A case study in Brighton, UK. Noise Mapp. 2015, 2, 1–12. [Google Scholar] [CrossRef]
- Aiello, L.M.; Schifanella, R.; Quercia, D.; Aletta, F. Chatty maps: Constructing sound maps of urban areas from social media data. Open Sci. 2016, 3, 150690. [Google Scholar] [CrossRef] [PubMed]
- D’Hondt, E.; Stevens, M.; Jacobs, A. Participatory noise mapping works! An evaluation of participatory sensing as an alternative to standard techniques for environmental monitoring. Pervasive Mob. Comput. 2013, 9, 681–694. [Google Scholar] [CrossRef]
- Rana, R.; Chou, C.T.; Bulusu, N.; Kanhere, S.; Hu, W. Ear-phone: A context-aware noise mapping using smart phones. Pervasive Mob. Comput. 2015, 17, 1–22. [Google Scholar] [CrossRef]
- Hsieh, H.-P.; Lin, S.-D.; Zheng, Y. Inferring air quality for station location recommendation based on urban big data. In Proceedings of the 21th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Sydney, Australia, 10–13 August 2015; pp. 437–446.
- Du, W.; Xing, Z.; Li, M.; He, B.; Chua, L.H.C.; Miao, H. Optimal sensor placement and measurement of wind for water quality studies in urban reservoirs. In Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 167–178.
- Macias, E.; Suarez, A.; Lloret, J. Mobile sensing systems. Sensors 2013, 13, 17292–17321. [Google Scholar] [CrossRef] [PubMed]
- Maisonneuve, N.; Stevens, M.; Niessen, M.E.; Steels, L. NoiseTube: Measuring and mapping noise pollution with mobile phones. In Information Technologies in Environmental Engineering; Springer: Berlin, Germany, 2009; pp. 215–228. [Google Scholar]
- Rana, R.K.; Chou, C.T.; Kanhere, S.S.; Bulusu, N.; Hu, W. Ear-phone: An end-to-end participatory urban noise mapping system. In Proceedings of the 9th ACM/IEEE International Conference on Information Processing in Sensor Networks, Stockholm, Sweden, 12–15 April 2010; pp. 105–116.
- Schweizer, I.; Bärtl, R.; Schulz, A.; Probst, F.; Mühläuser, M. NoiseMap-real-time participatory noise maps. In Proceedings of the PhoneSense 2011—Second International Workshop on Sensing Applications on Mobile Phones, Seattle, WA, USA, 1–4 November 2011; pp. 1–5.
- Guillaume, G.; Can, A.; Petit, G.; Fortin, N.; Palominos, S.; Gauvreau, B.; Bocher, E.; Picaut, J. Noise mapping based on participative measurements. Noise Mapp. 2016, 3, 140–156. [Google Scholar] [CrossRef]
- Can, A.; Van Renterghem, T.; Botteldooren, D. Exploring the use of mobile sensors for noise and black carbon measurements in an urban environment. In Proceedings of the Acoustics 2012 Nantes Conference, Nantes, France, 23–27 April 2012; pp. 1549–1554.
- International Electrotechnical Commission. Electroacoustics—Sound Level Meters. Part 1: Specifications; IEC 61672-1; IEC: Geneva, Switzerland, 2002. [Google Scholar]
- Cui, Y.; Chipchase, J.; Ichikawa, F. A cross culture study on phone carrying and physical personalization. In Usability and Internationalization, Proceedings of the Hci and Culture: Second International Conference on Usability and Internationalization, Ui-Hcii 2007, Beijing, China, 22–27 July 2007; Aykin, N., Ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 483–492. [Google Scholar]
- Guidelines and Manuals (Department of Environment and Heritage Protection). Available online: https://www.ehp.qld.gov.au/licences-permits/guidelines.html (accessed on 18 June 2016).
- Cuevas-Martinez, J.C.; Gadeo-Martos, M.A.; Fernandez-Prieto, J.A.; Yuste-Delgado, A.J. Wireless Intelligent Sensors Management Application Protocol-WISMAP. Sensors 2010, 10, 8827–8849. [Google Scholar] [CrossRef] [PubMed]
- Audacity. Available online: http://www.audacityteam.org/ (accessed on 20 February 2016).
- Murphy, E.; King, E.A. Testing the accuracy of smartphones and sound level meter applications for measuring environmental noise. Appl. Acous. 2016, 106, 16–22. [Google Scholar] [CrossRef]
- Li, T.J.-J.; Sen, S.; Hecht, B. Leveraging advances in natural language processing to better understand Tobler’s first law of geography. In Proceedings of the 22nd ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Dallas, TX, USA, 4–7 November 2014; pp. 513–516.
- Wang, J.F.; Christakos, G.; Hu, M.G. Modeling spatial means of surfaces with stratified nonhomogeneity. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4167–4174. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 1990, 4, 313–332. [Google Scholar] [CrossRef]
- Boya Audio Equipment Co., LTD. By-lm10. Available online: http://www.boya-mic.com/products/show-398.html (accessed on 16 May 2016).
- MathWorks-Makers of MATLAB and Simulink. Available online: http://www.mathworks.com/ (accessed on 23 August 2016).
- ArcGIS Platform. Available online: http://www.esri.com/software/arcgis (accessed on 23 August 2016).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SLM | HTC | S3 | J4-1 | J4-2 | iPhone6p |
|---|---|---|---|---|---|
| 53.75 | 54.31 | 54.60 | 54.34 | 56.38 | 56.10 |
| 63.20 | 63.57 | 63.89 | 63.68 | 65.82 | 65.54 |
| 67.56 | 67.87 | 68.22 | 68.02 | 70.12 | 69.87 |
| 70.24 | 70.61 | 70.98 | 70.80 | 72.95 | 72.64 |
| 72.41 | 72.59 | 73.00 | 72.83 | 74.99 | 74.67 |
| 74.00 | 74.15 | 74.58 | 74.43 | 76.58 | 75.89 |
| 76.99 | 77.01 | 77.51 | 77.36 | 79.50 | 77.61 |
| 80.65 | 80.57 | 81.05 | 80.88 | 83.01 | 79.69 |
| HTC | S3 | J4-1 | J4-2 | iPhone6p | |
|---|---|---|---|---|---|
| Mean | 0.24 | 0.63 | 0.44 | 2.57 | 1.65 |
| Maximum | 0.56 | 0.85 | 0.59 | 2.71 | 2.40 |
| Period | Precision | Kriging | RNMM | Building | Road | Square |
|---|---|---|---|---|---|---|
| Peak hour | Mean | 0.44 | 0.17 | 0.46 | 0.08 | −2.19 |
| Std. | 3.06 | 2.49 | 2.19 | 2.52 | 4.42 | |
| Off-peak hour | Mean | −0.09 | −0.01 | 0.08 | −0.02 | −0.70 |
| Std. | 3.11 | 3.02 | 2.50 | 3.46 | 1.07 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, J.; Xia, H.; Liu, S.; Qiao, Y. Mapping Urban Environmental Noise Using Smartphones. Sensors 2016, 16, 1692. https://doi.org/10.3390/s16101692
Zuo J, Xia H, Liu S, Qiao Y. Mapping Urban Environmental Noise Using Smartphones. Sensors. 2016; 16(10):1692. https://doi.org/10.3390/s16101692
Chicago/Turabian StyleZuo, Jinbo, Hao Xia, Shuo Liu, and Yanyou Qiao. 2016. "Mapping Urban Environmental Noise Using Smartphones" Sensors 16, no. 10: 1692. https://doi.org/10.3390/s16101692
APA StyleZuo, J., Xia, H., Liu, S., & Qiao, Y. (2016). Mapping Urban Environmental Noise Using Smartphones. Sensors, 16(10), 1692. https://doi.org/10.3390/s16101692