
Performance Enhancement of Land Vehicle Positioning Using Multiple GPS Receivers in an Urban Area

Abstract
:1. Introduction
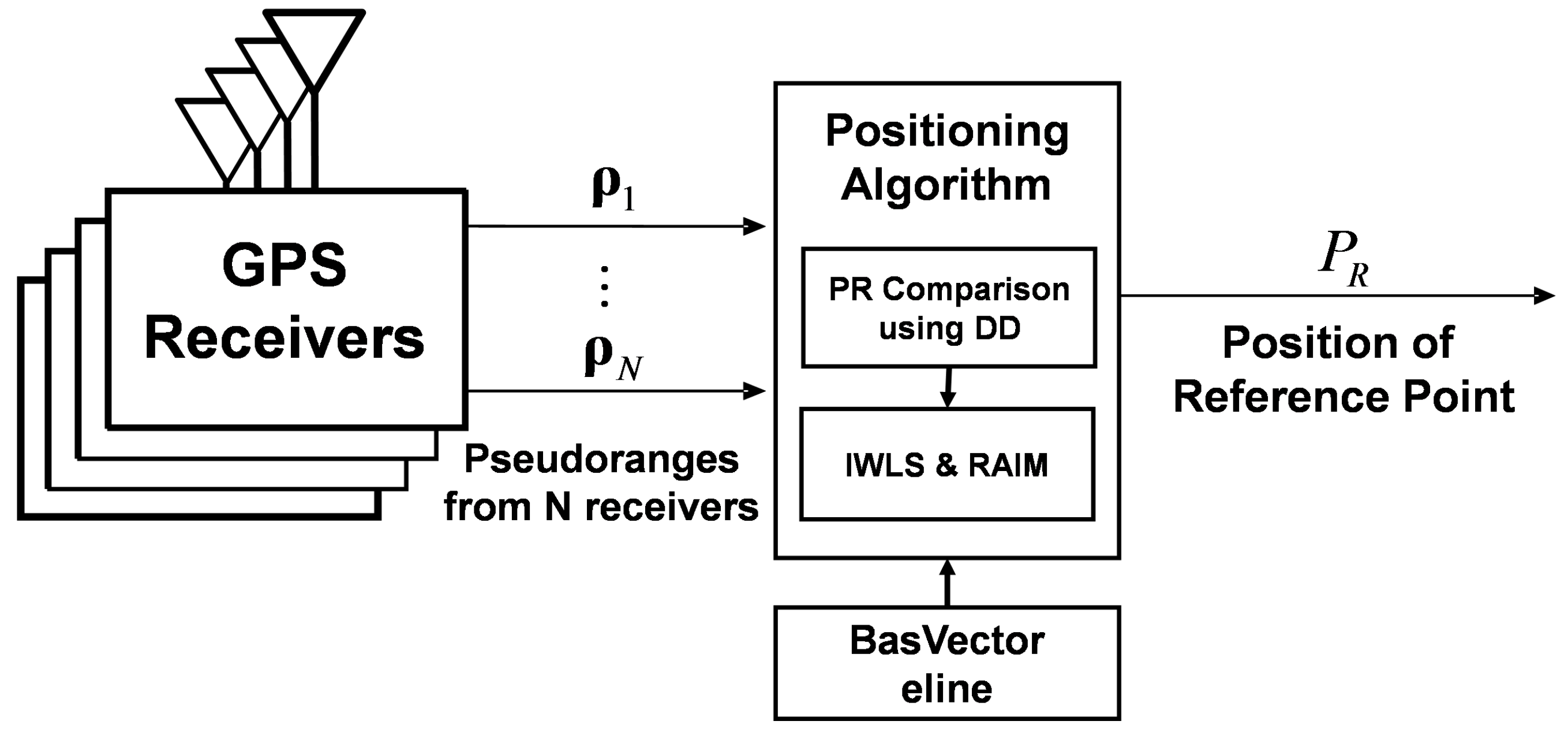
2. Positioning Algorithm for Multiple Receivers
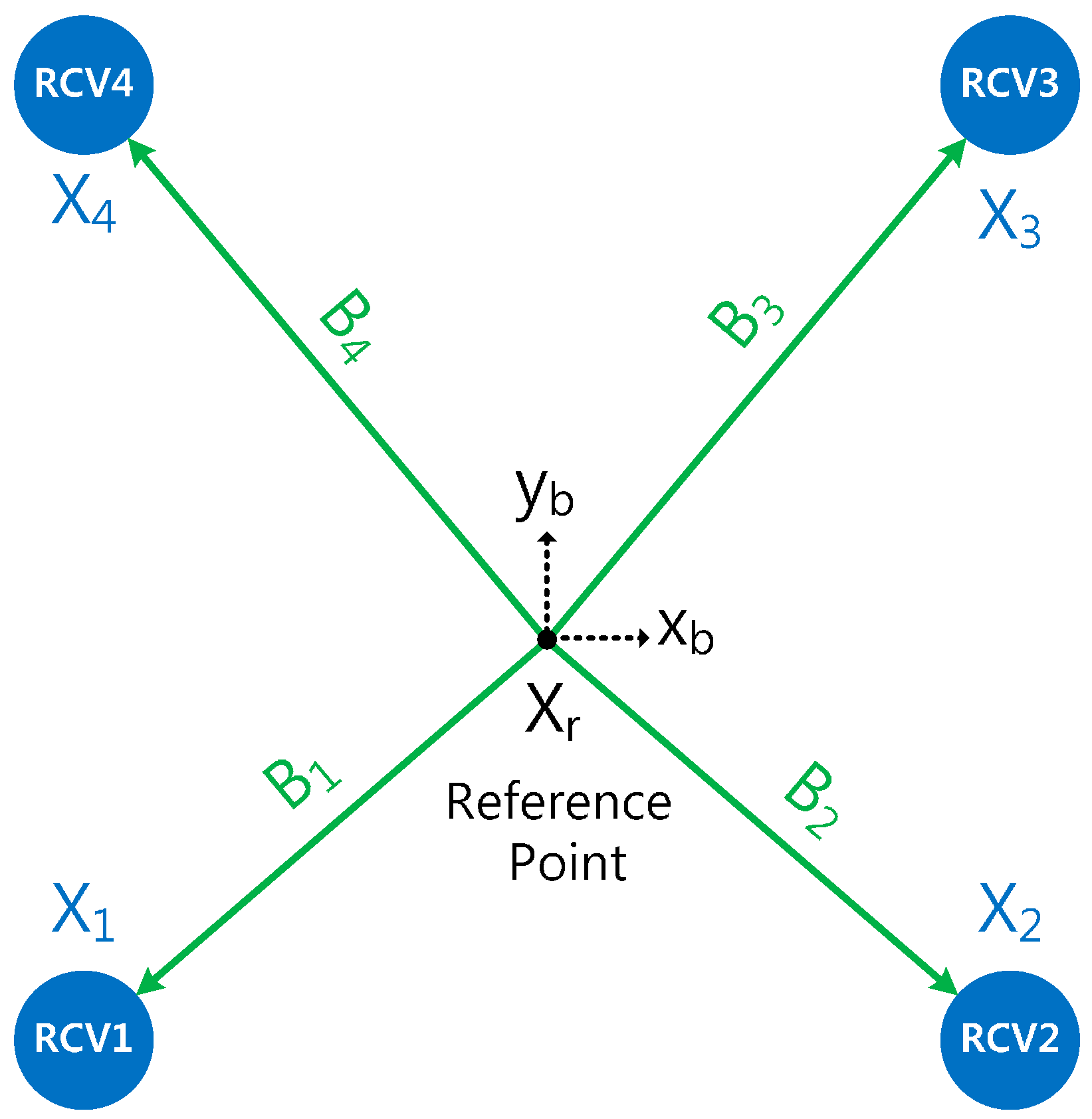
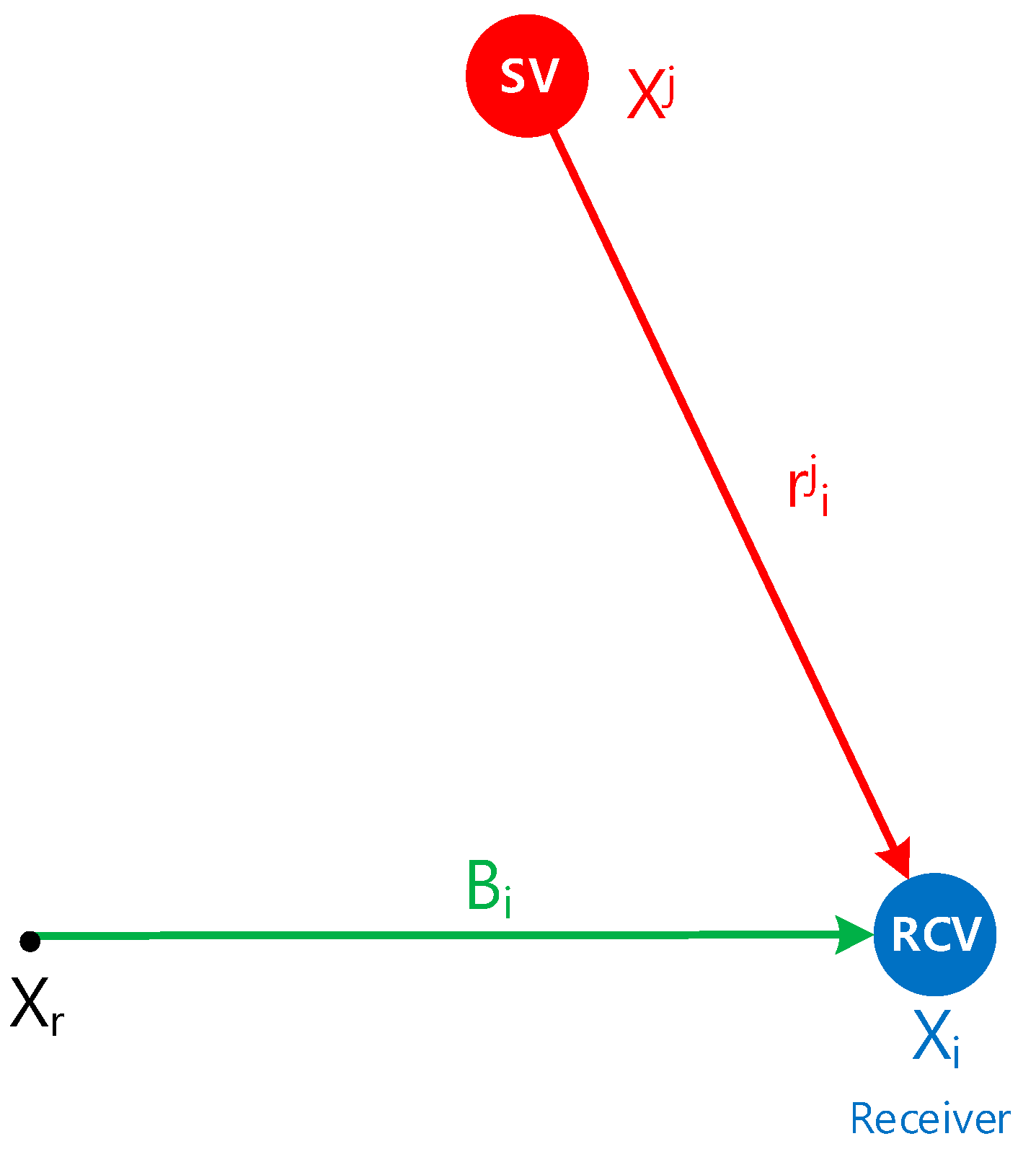
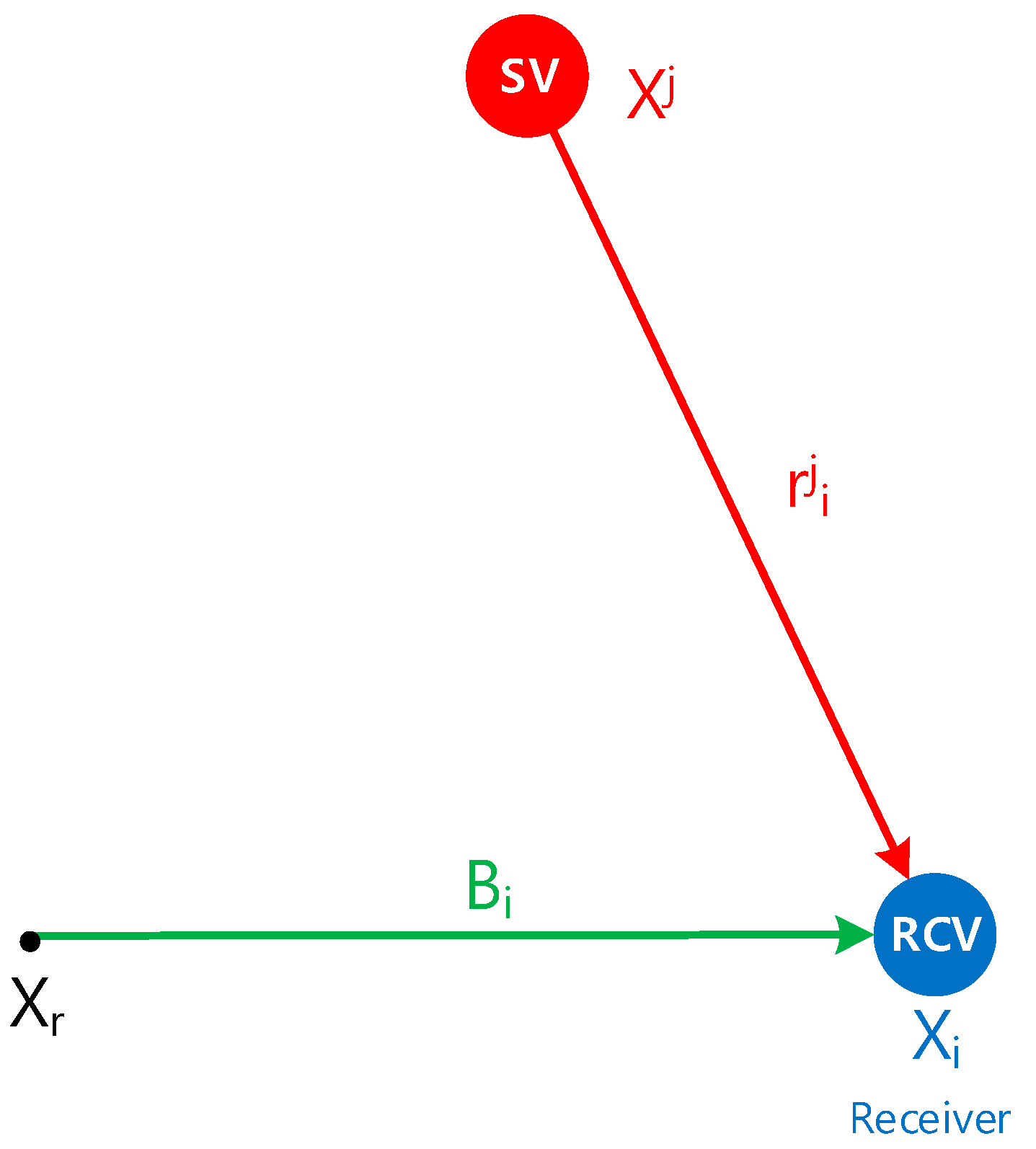
2.1. Measurement Model
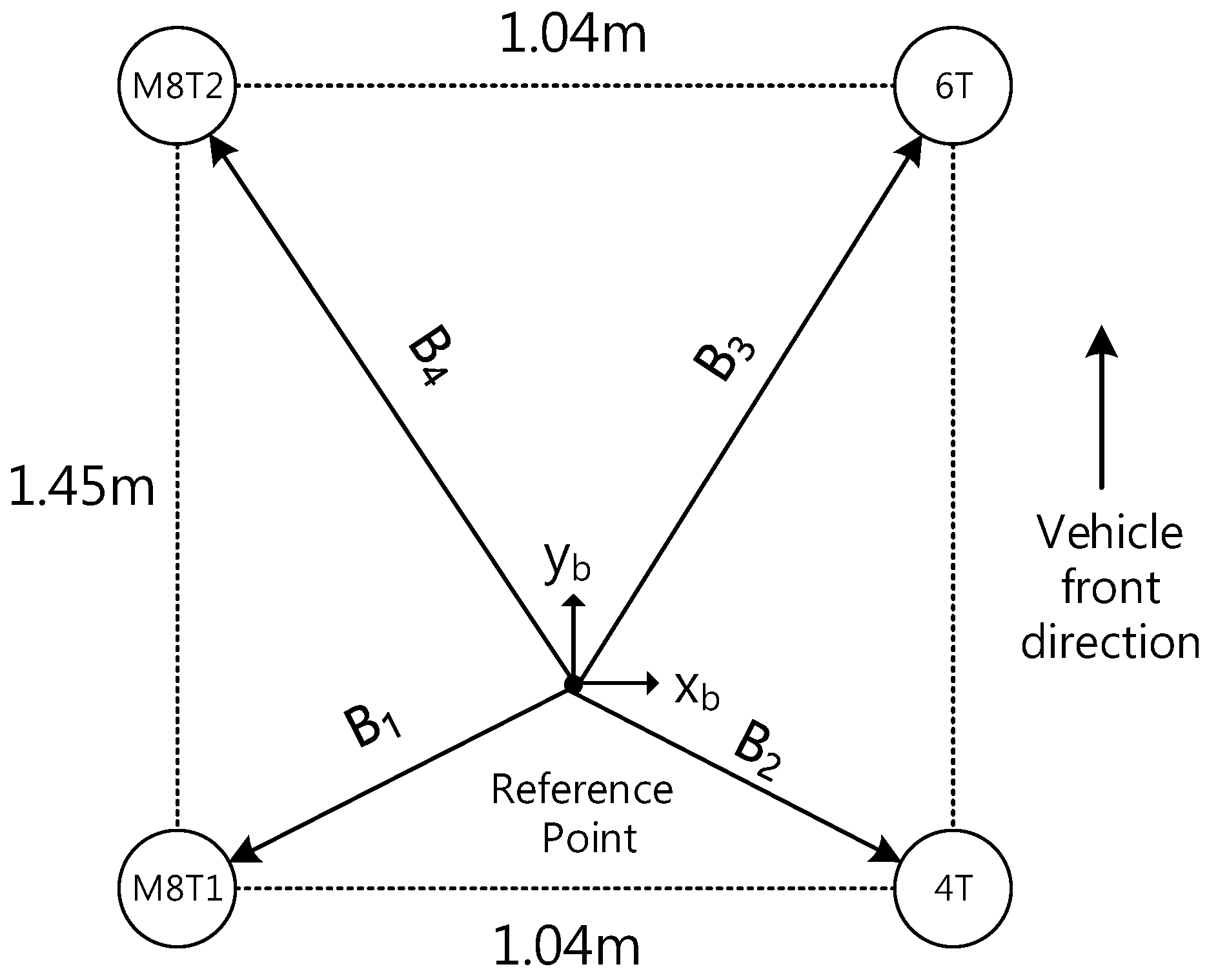
- : position of multiple receivers in the navigation frame (i = 1, ..., n)
- : position of reference point in the navigation frame
- : baseline vector in the body frame
- : attitude of vehicle in the reference point
- : rotation matrix from the body to the navigation frame
2.2. Implementation of IWLS
- State variable:where, is the clock bias of the receiver and is the number of receiver.
- Measurement equation:where:
- : pseudoranges of receivers
- : pseudorange of i-th receiver
- : the number of measured pseudoranges of i-th receiver
- : measurement noise of receivers
- : measurement noise of i-th receiver
- : observation equation of receivers
- : observation equation of i-th receiver
- Linearization of measurement equation:where:
- IWLS:
3. Outlier Detection and Exclusion for Multiple Receivers
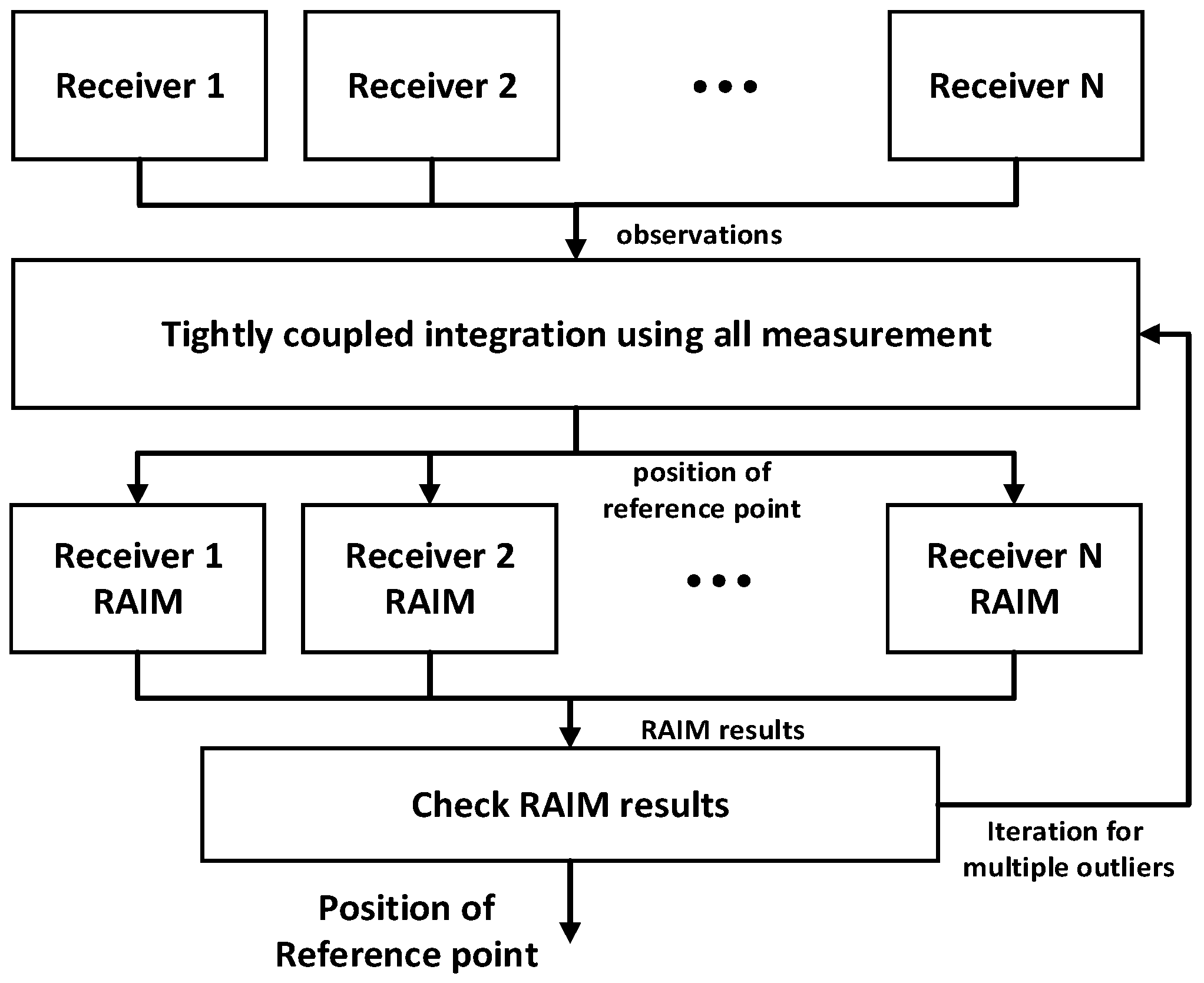
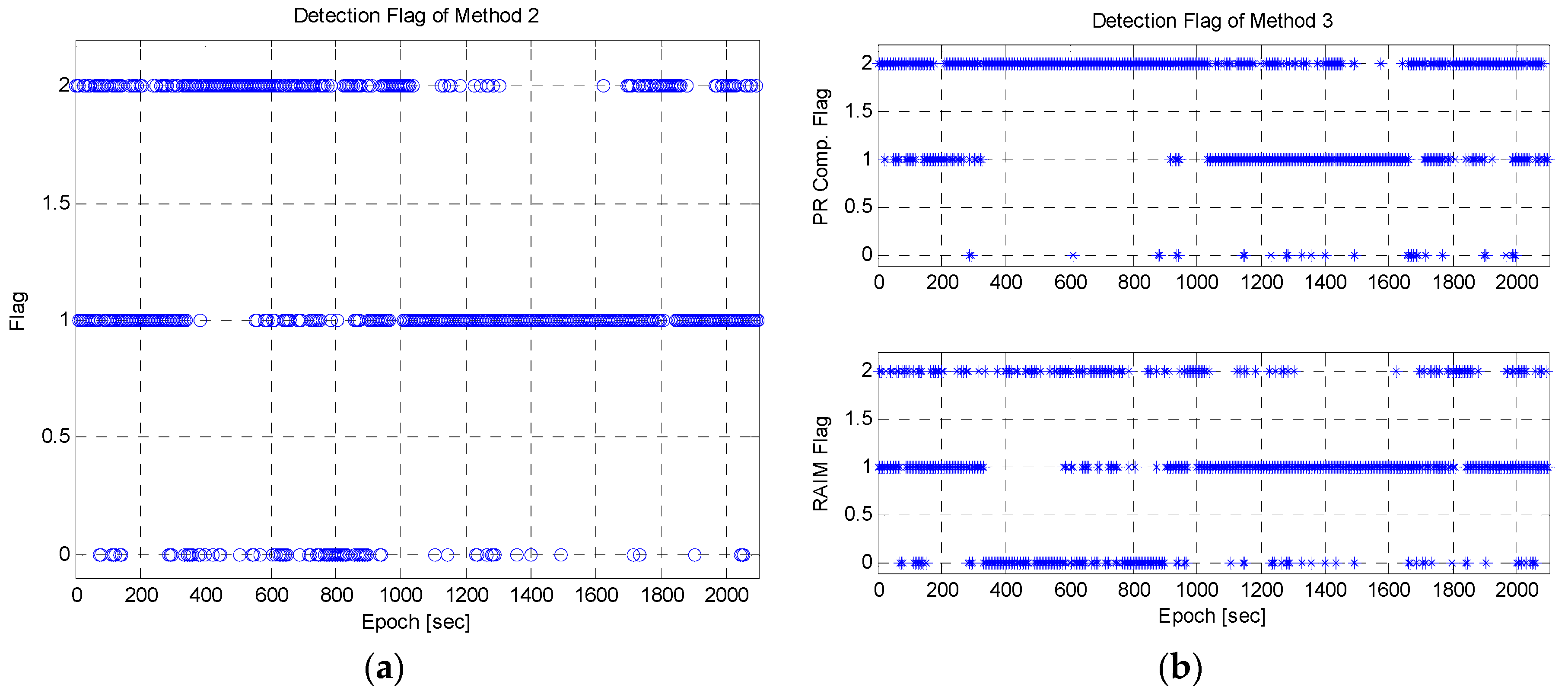
3.1. RAIM Algorithm for Multiple Receivers
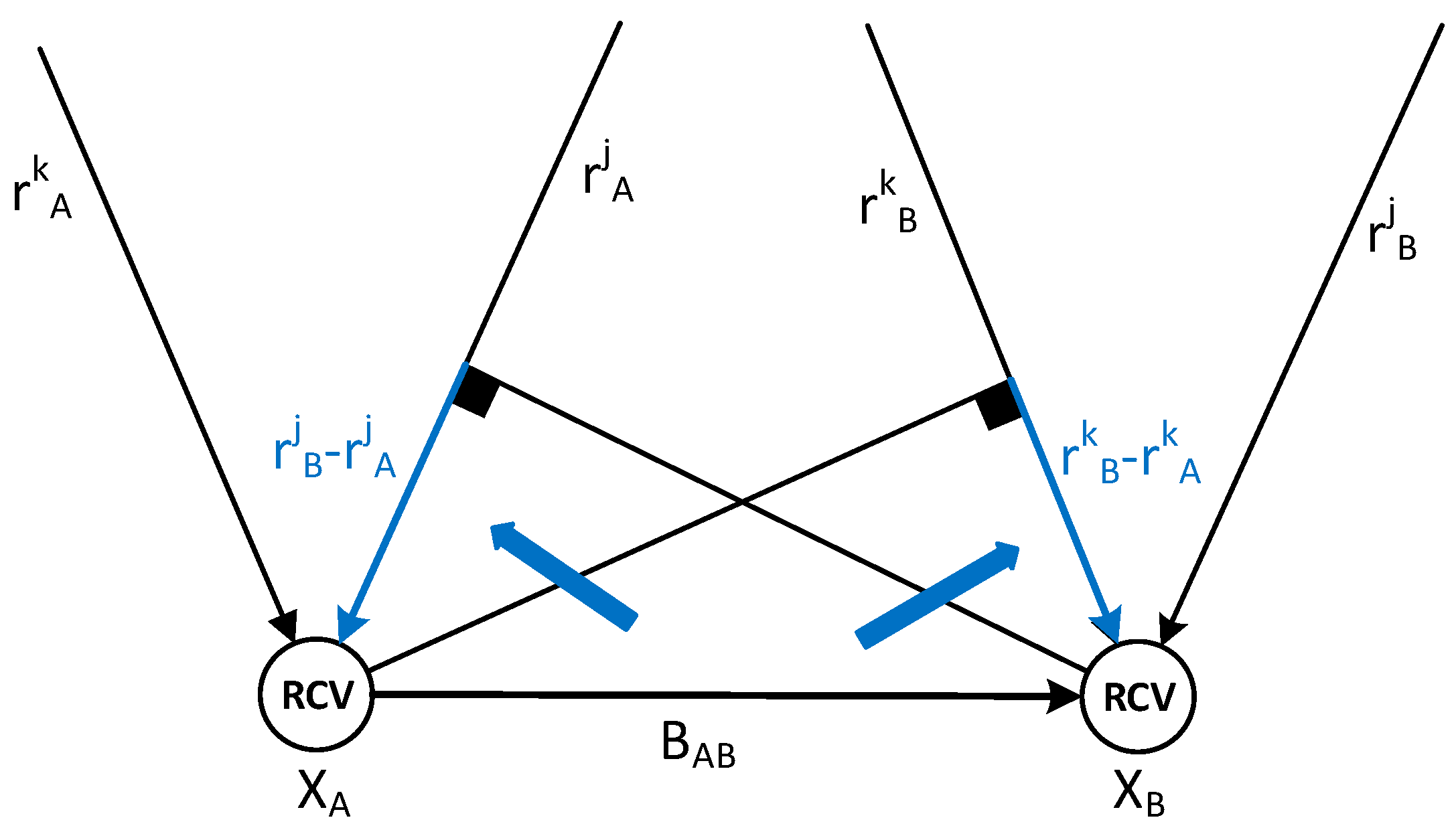
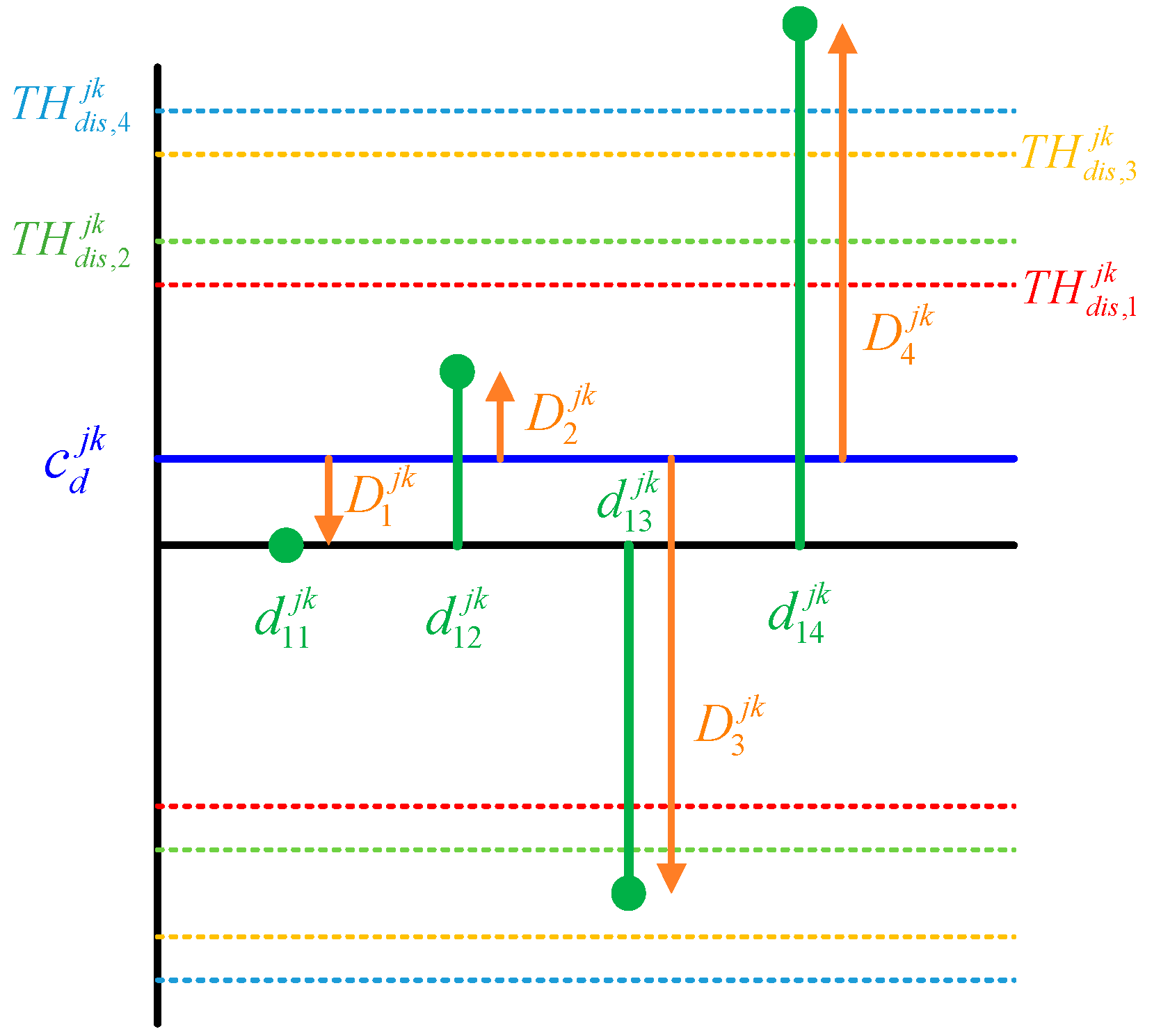
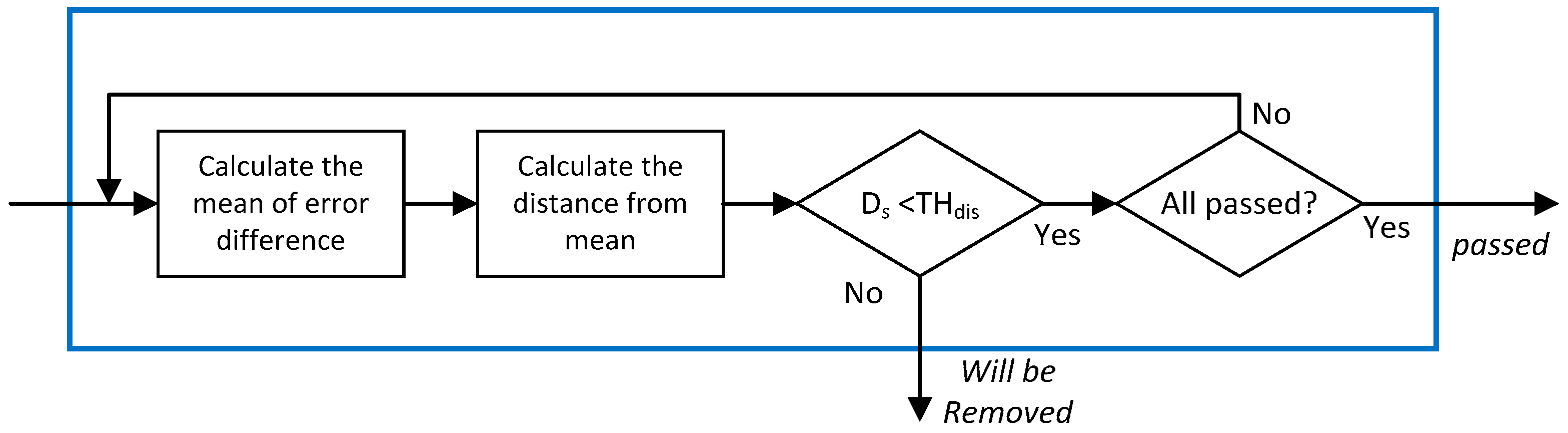
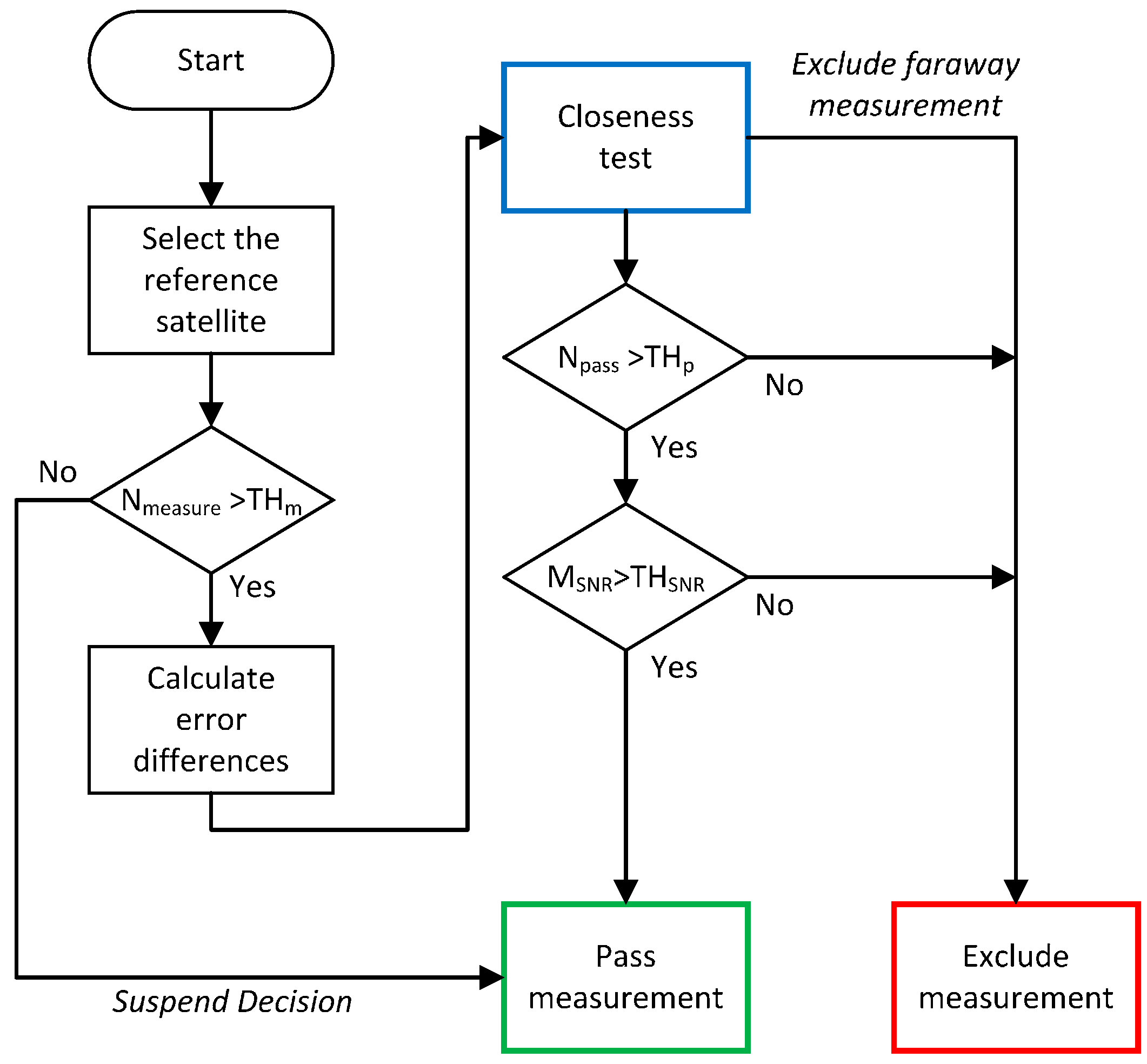
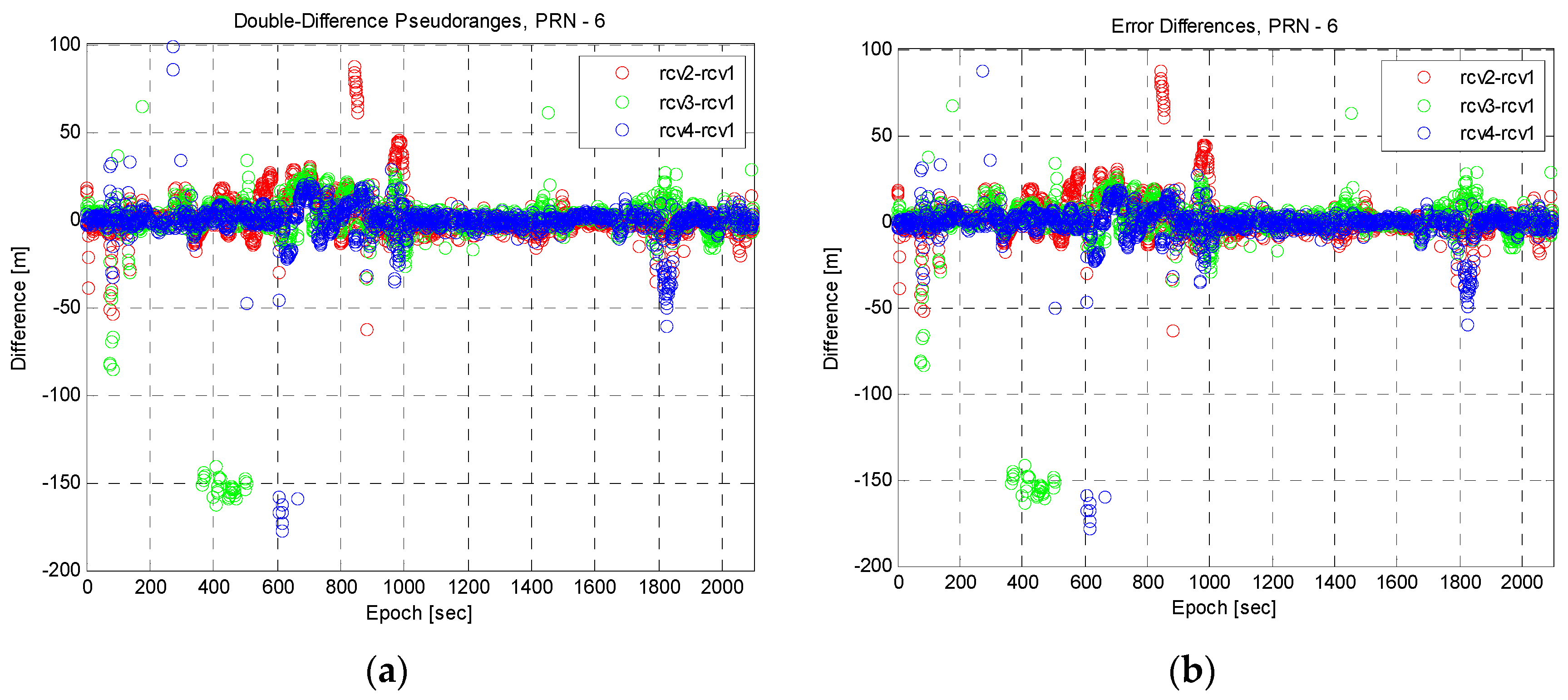
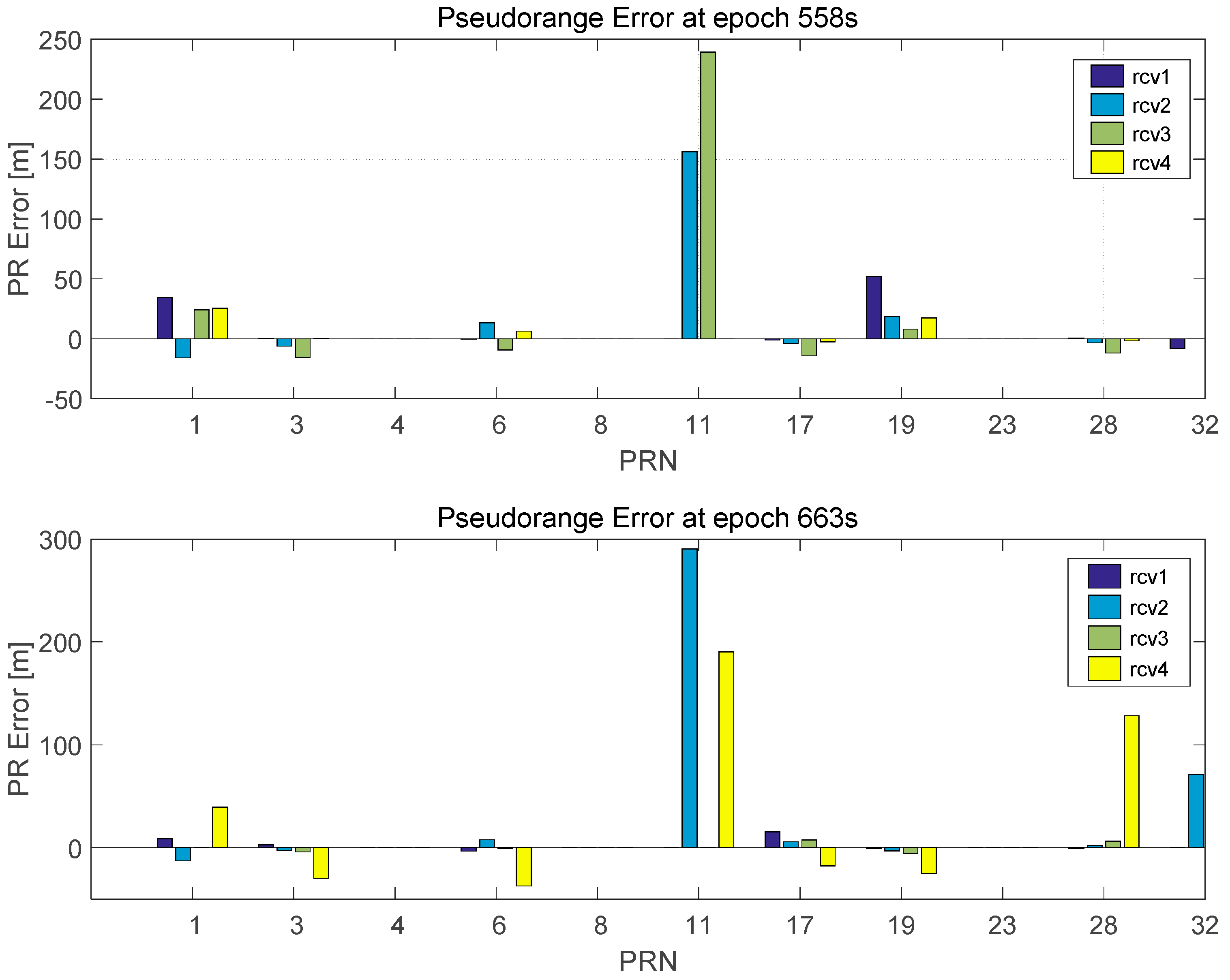
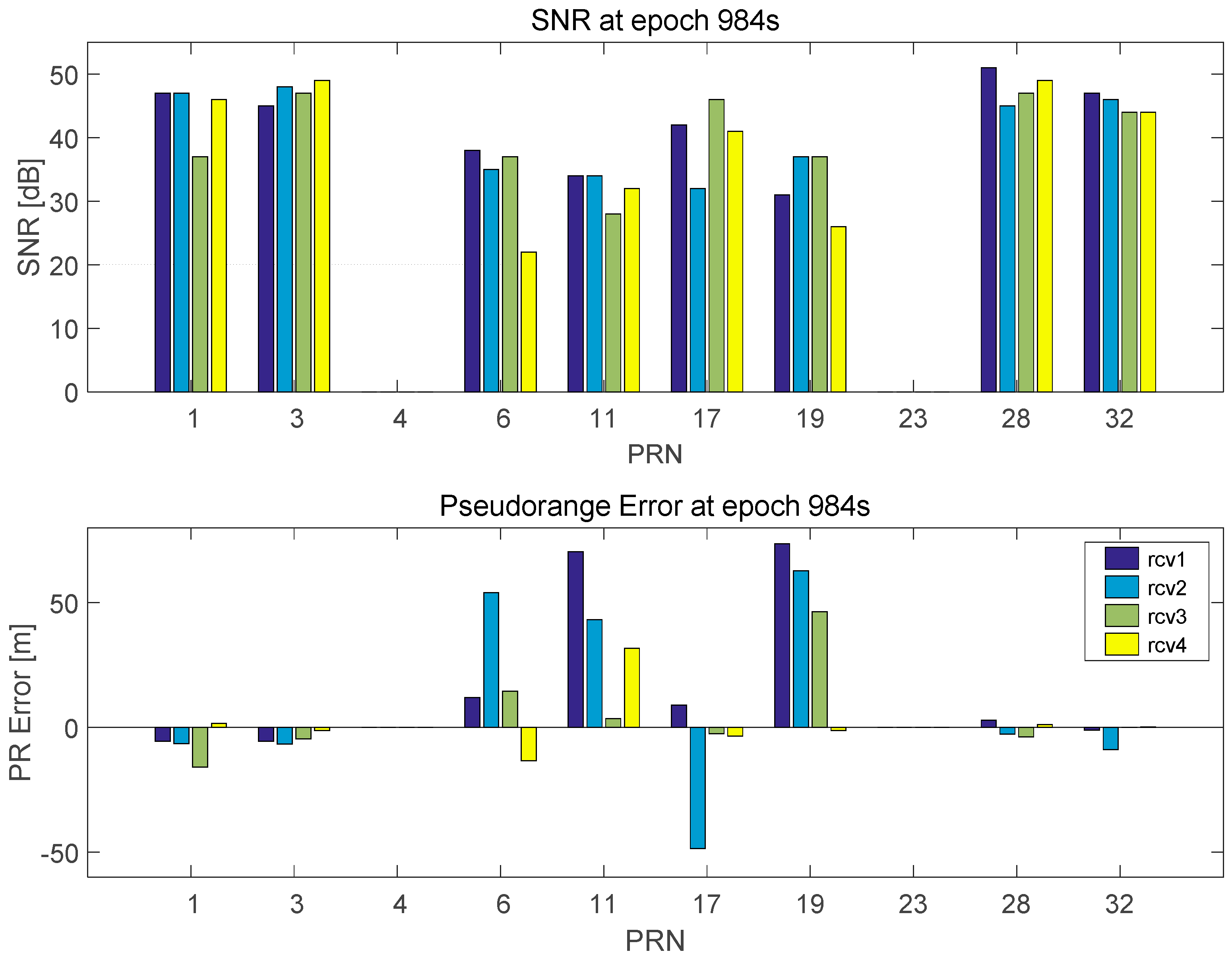
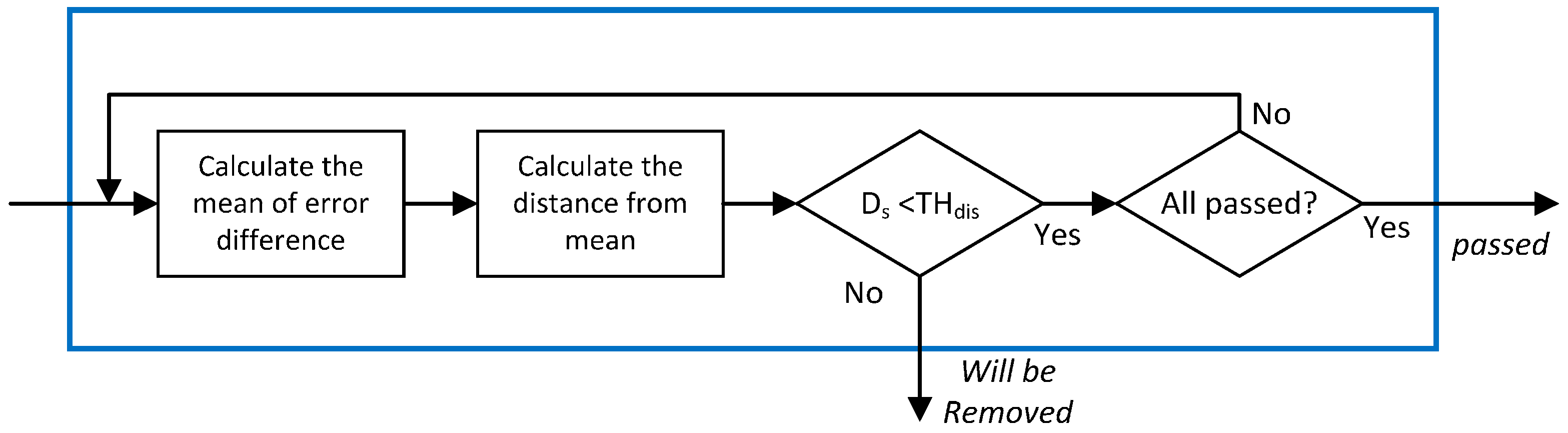
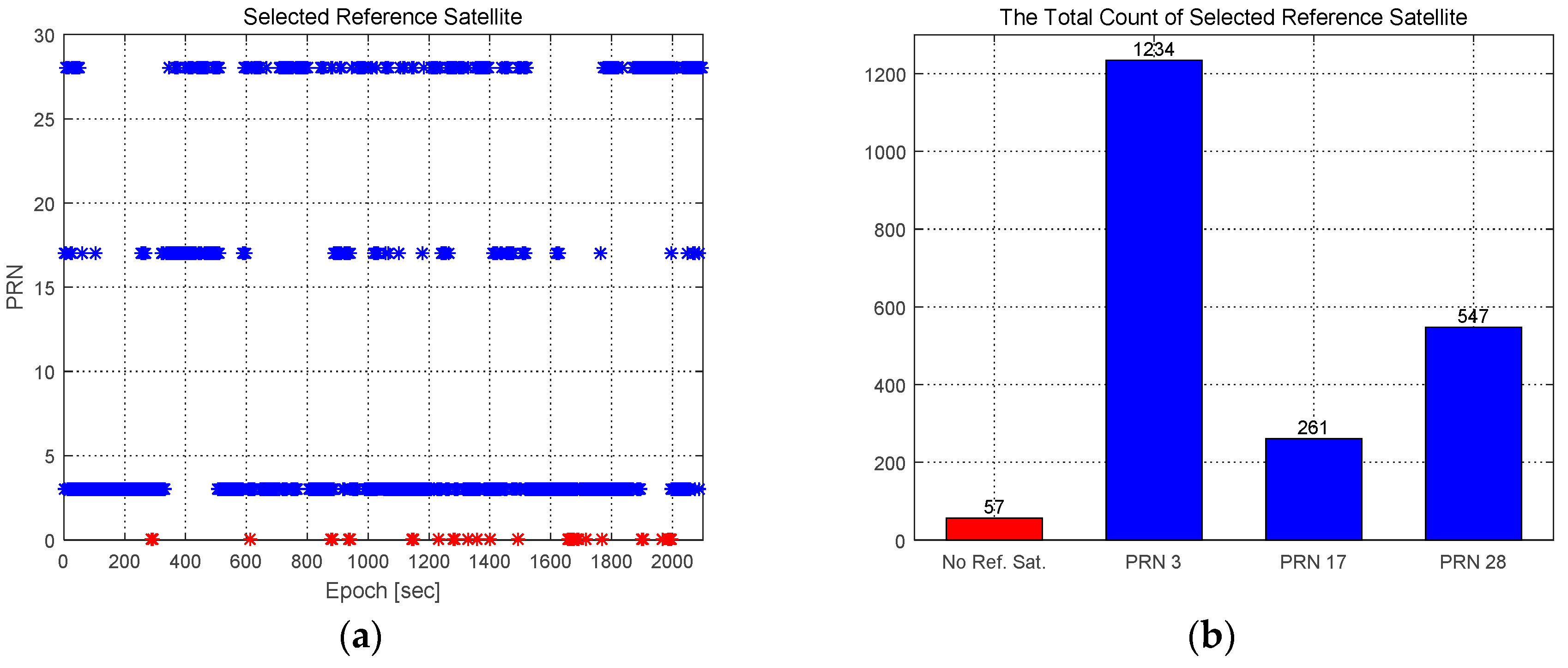
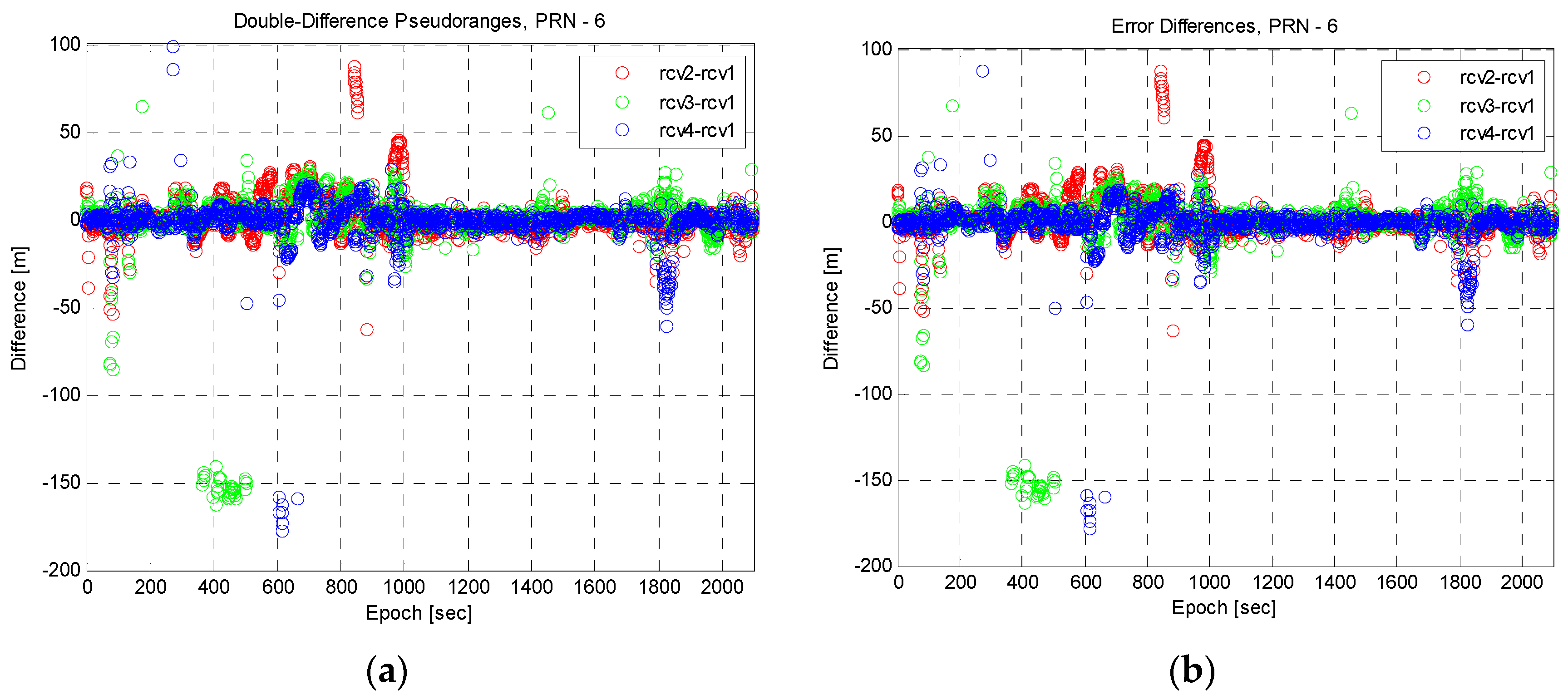
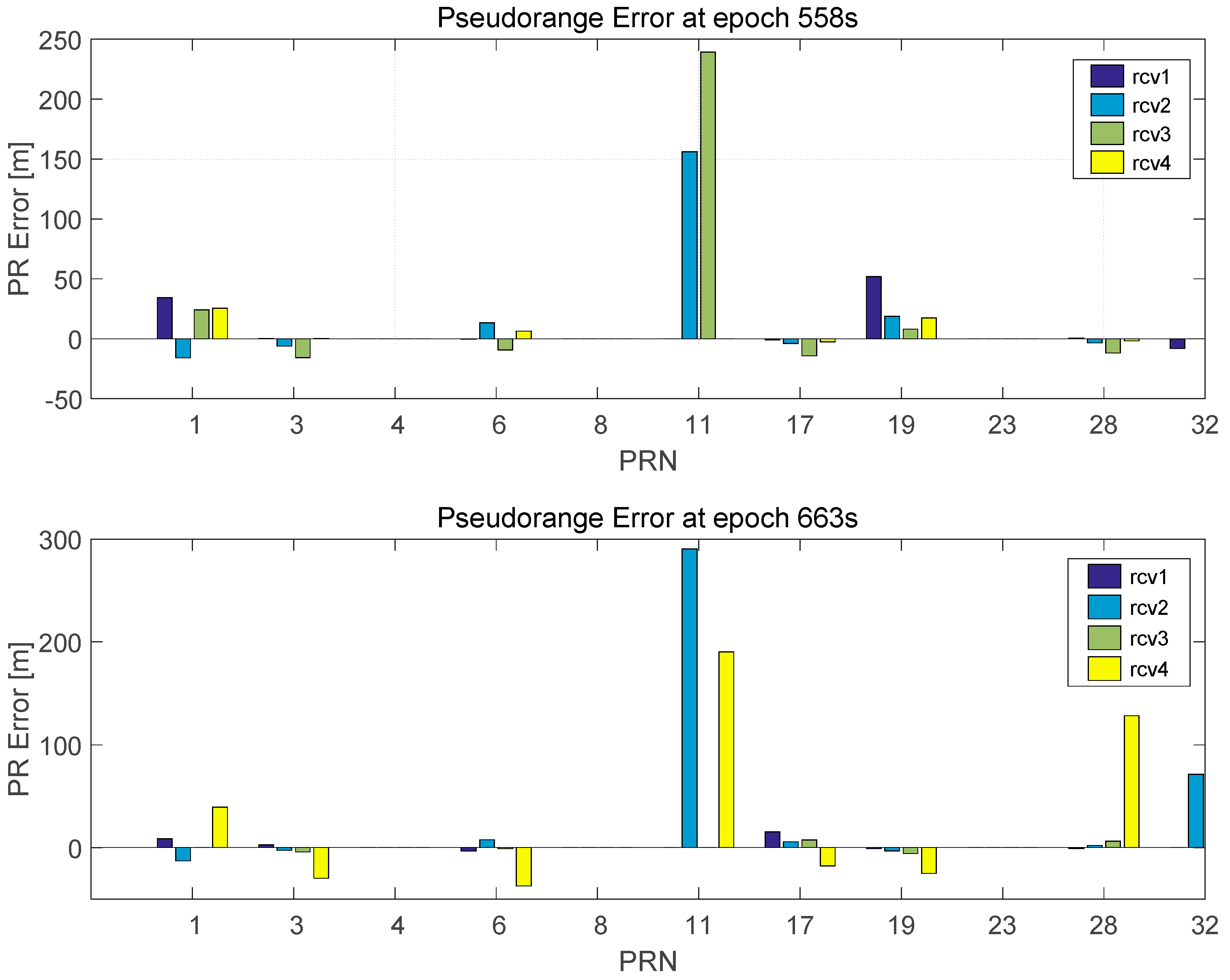
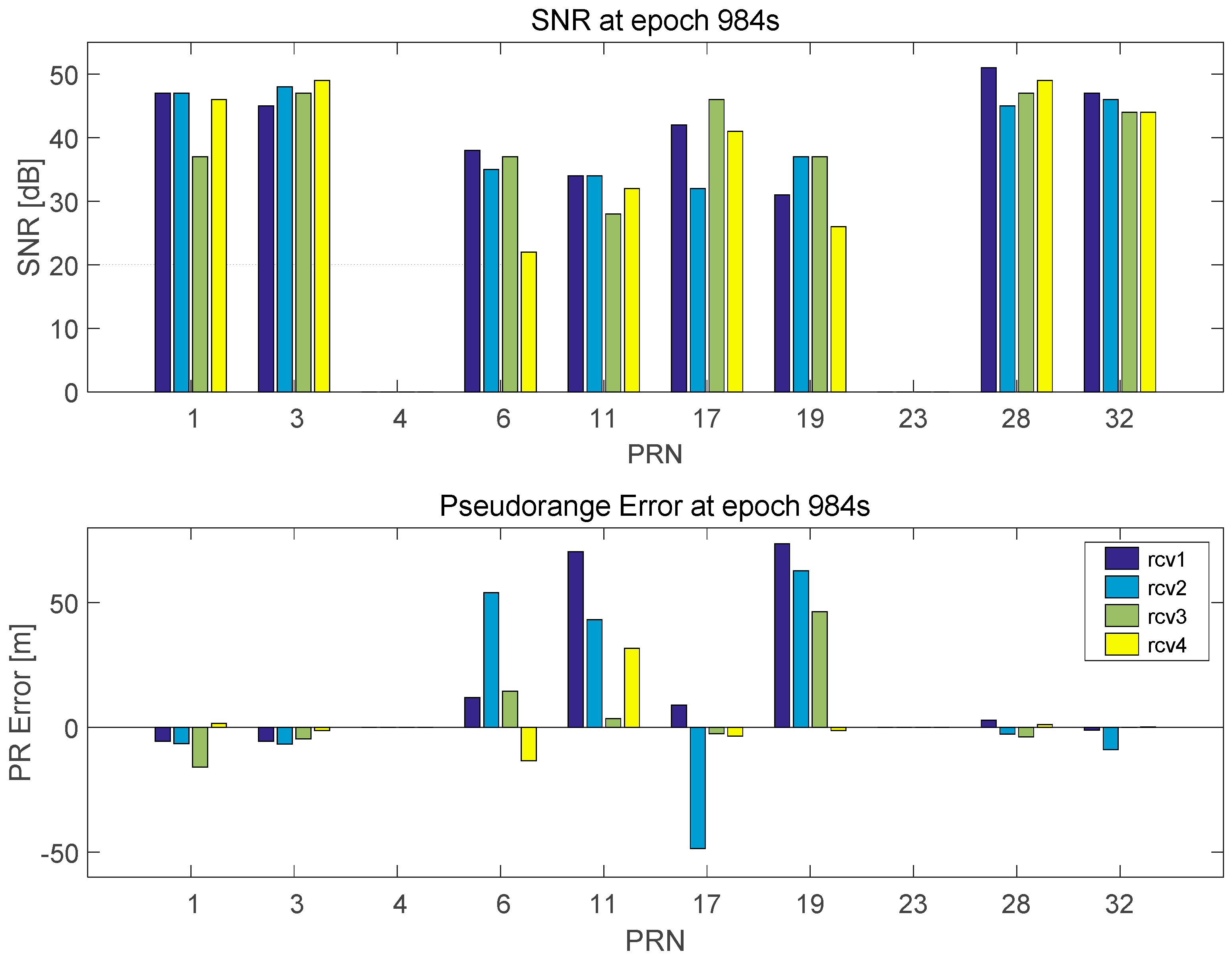
3.2. Pseudorange Comparison Method
- : double-difference pseudorange for satellites j and k in Receivers A and B, respectively
- : single difference pseudorange for satellite j in Receivers A and B
- : geometric range between satellite j and Receiver A
- : bias error included in pseudorange from satellite j to Receiver A
- : noise in double-difference pseudorange
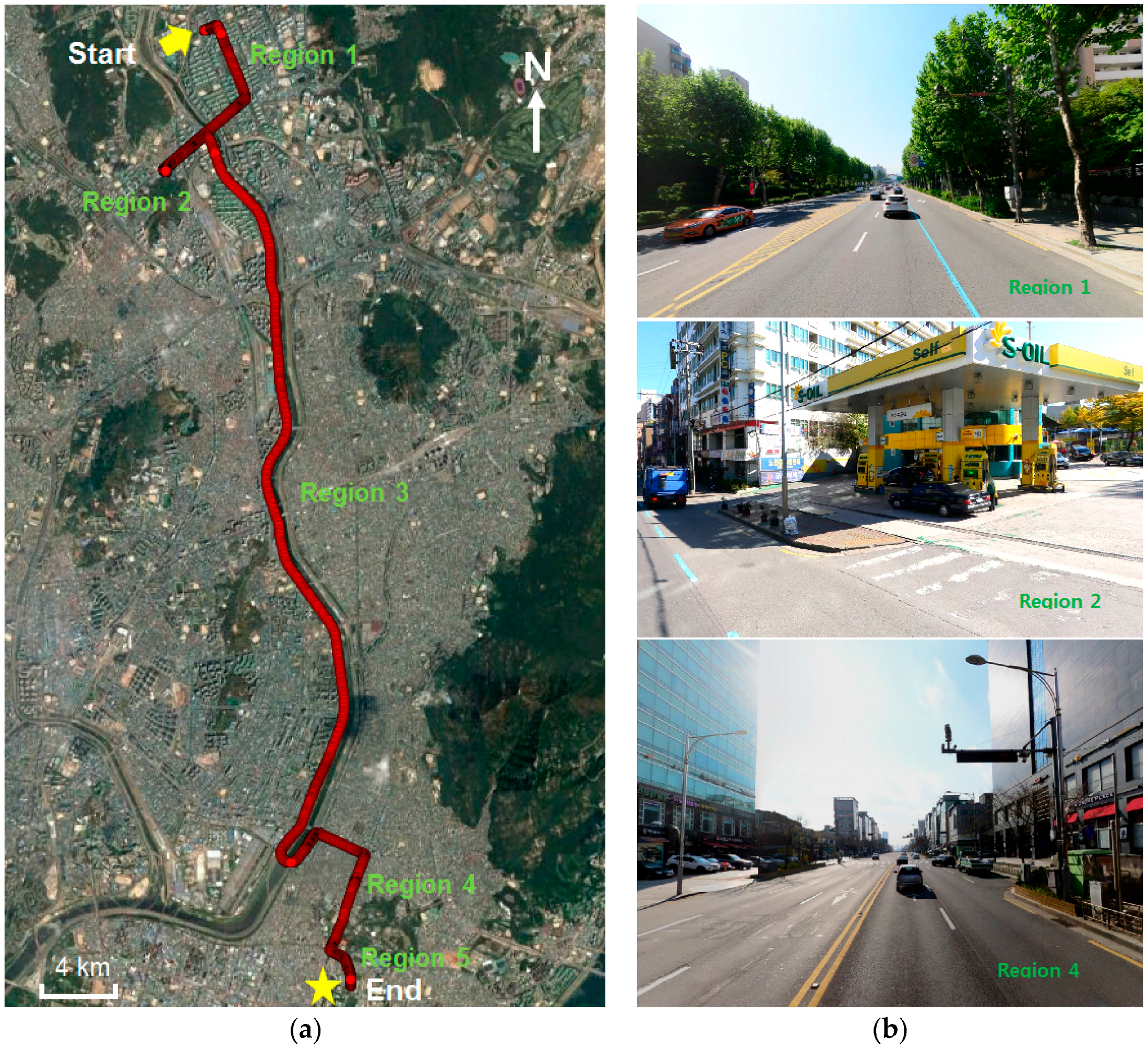
4. Experiment
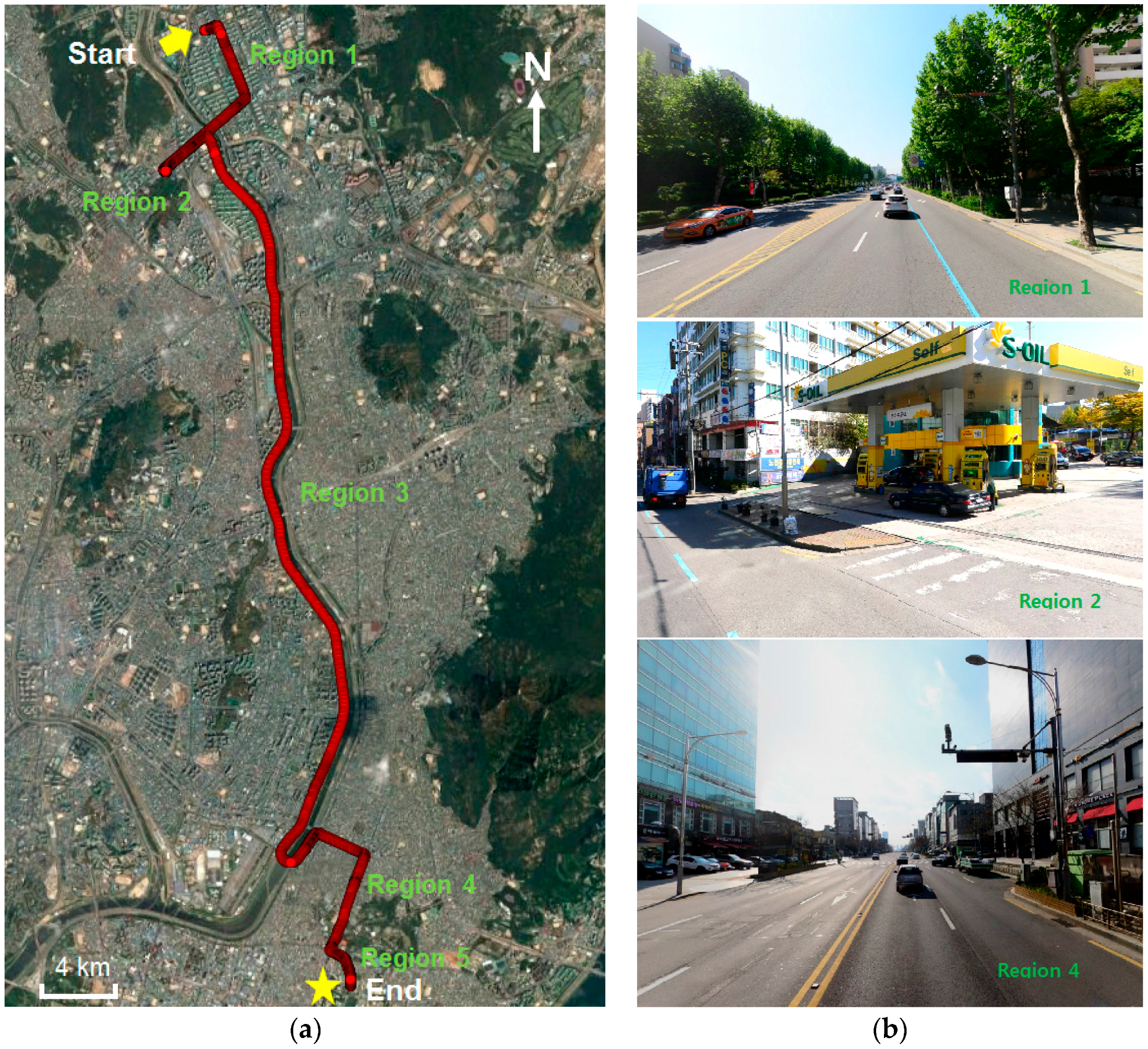
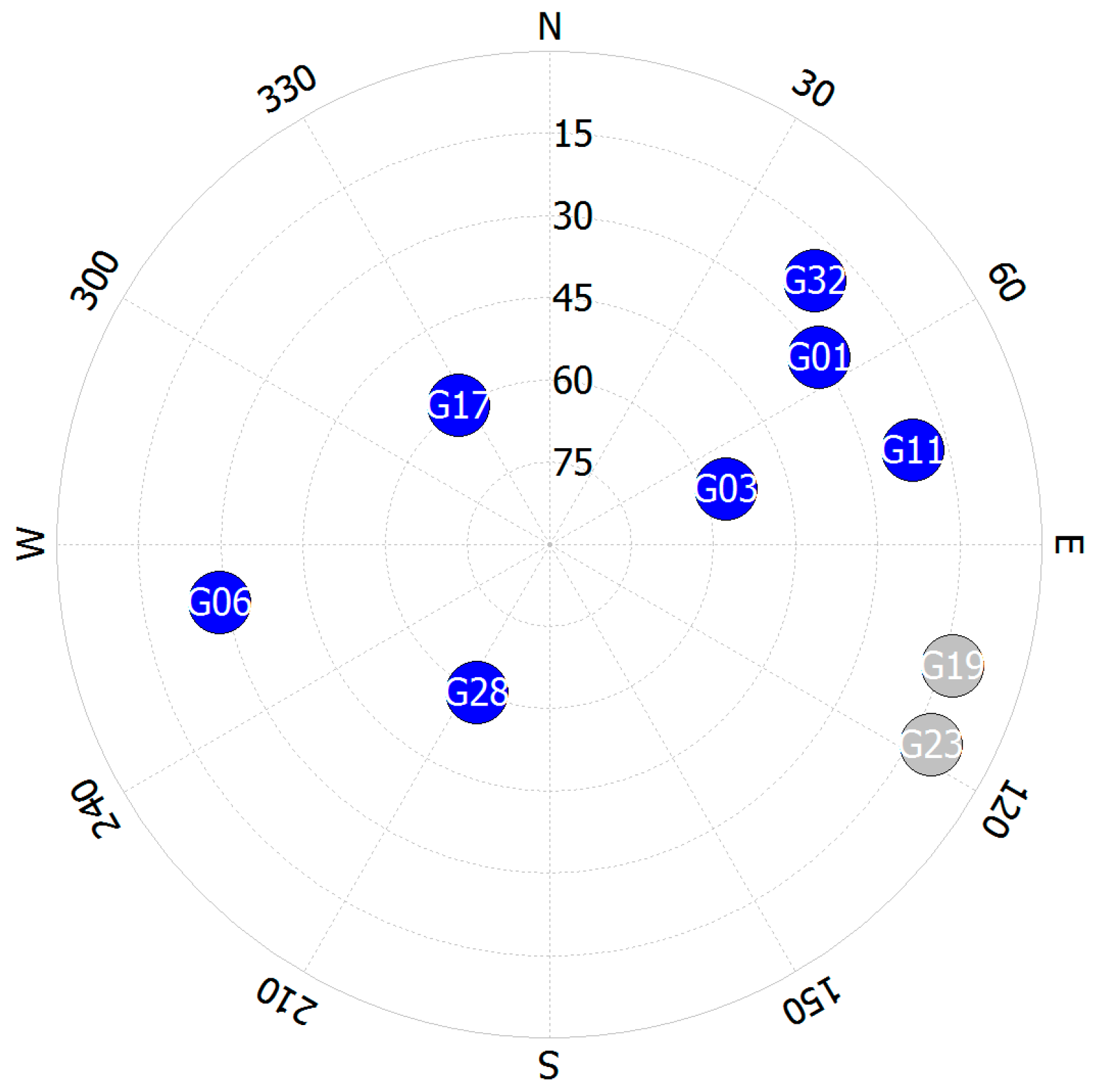
4.1. Experimental Environment
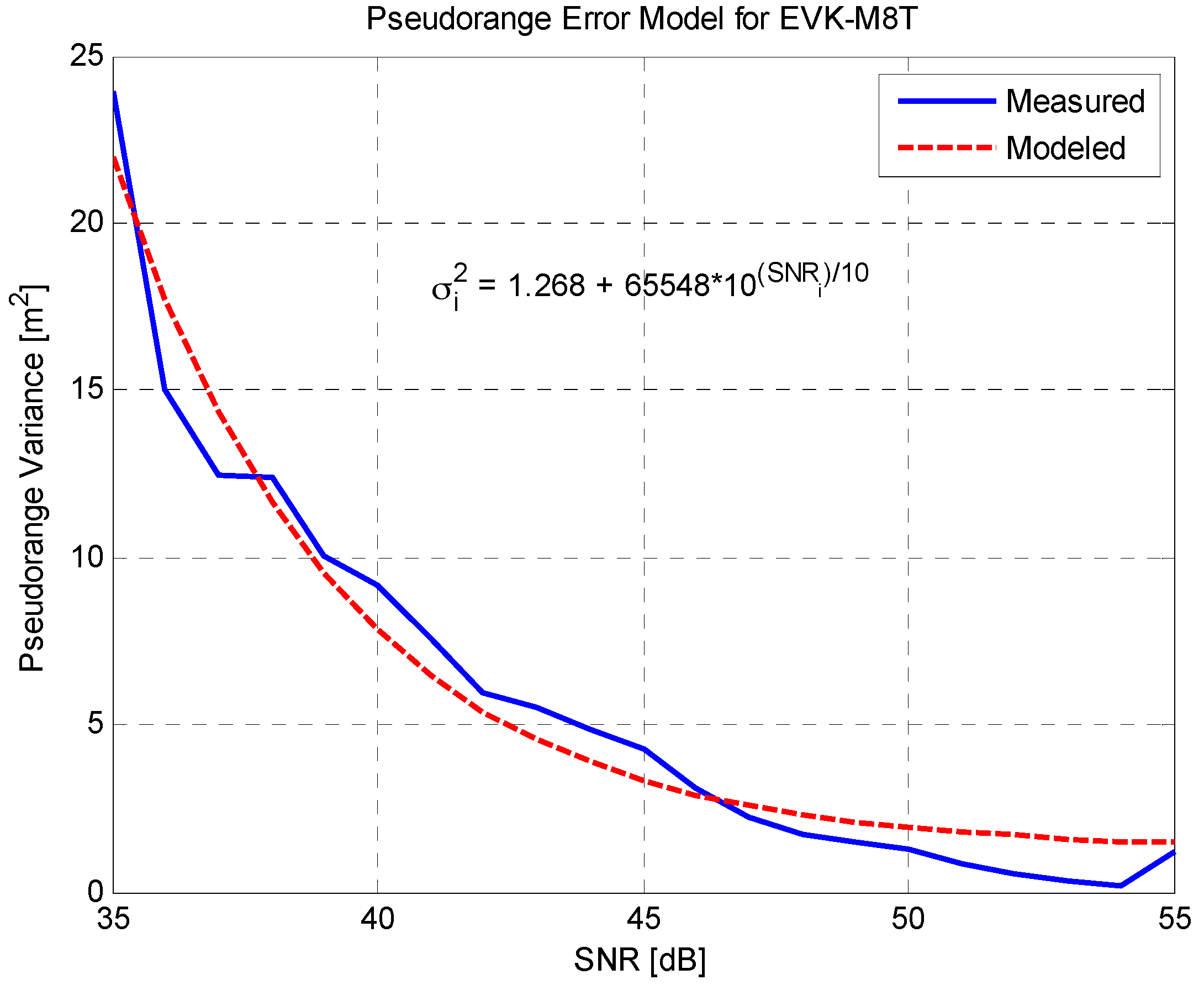
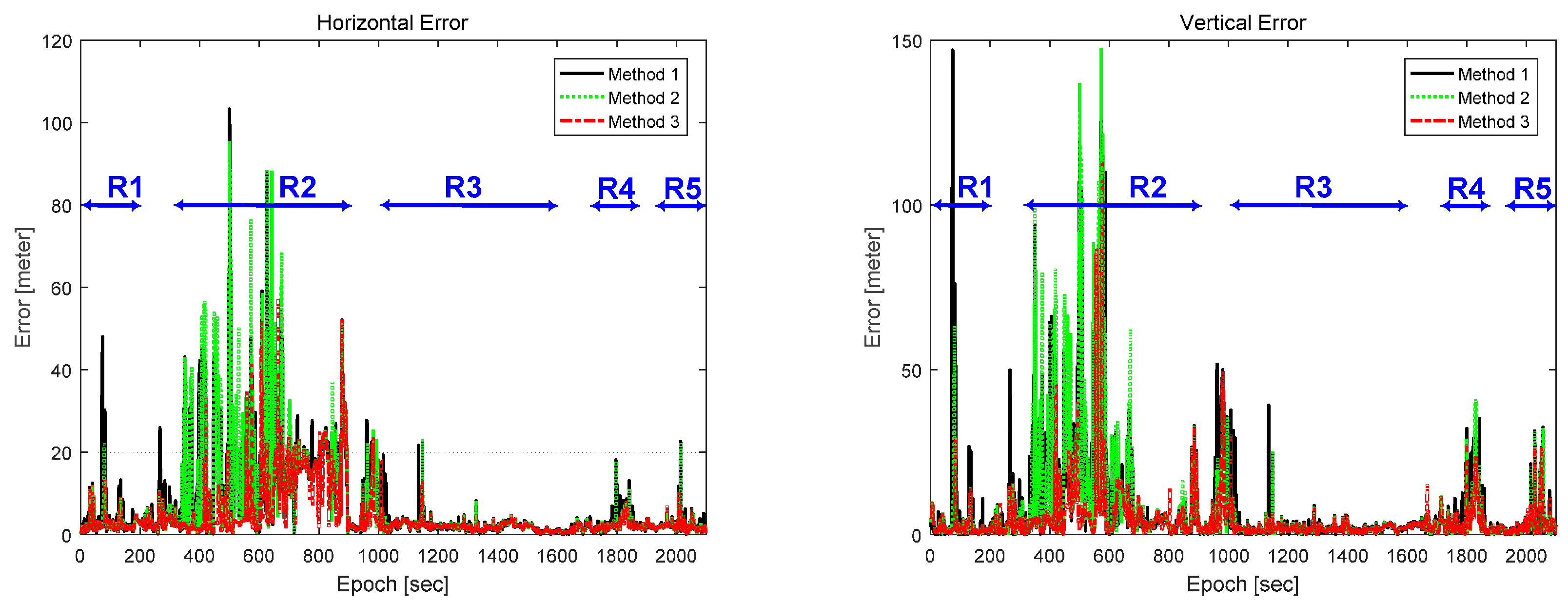
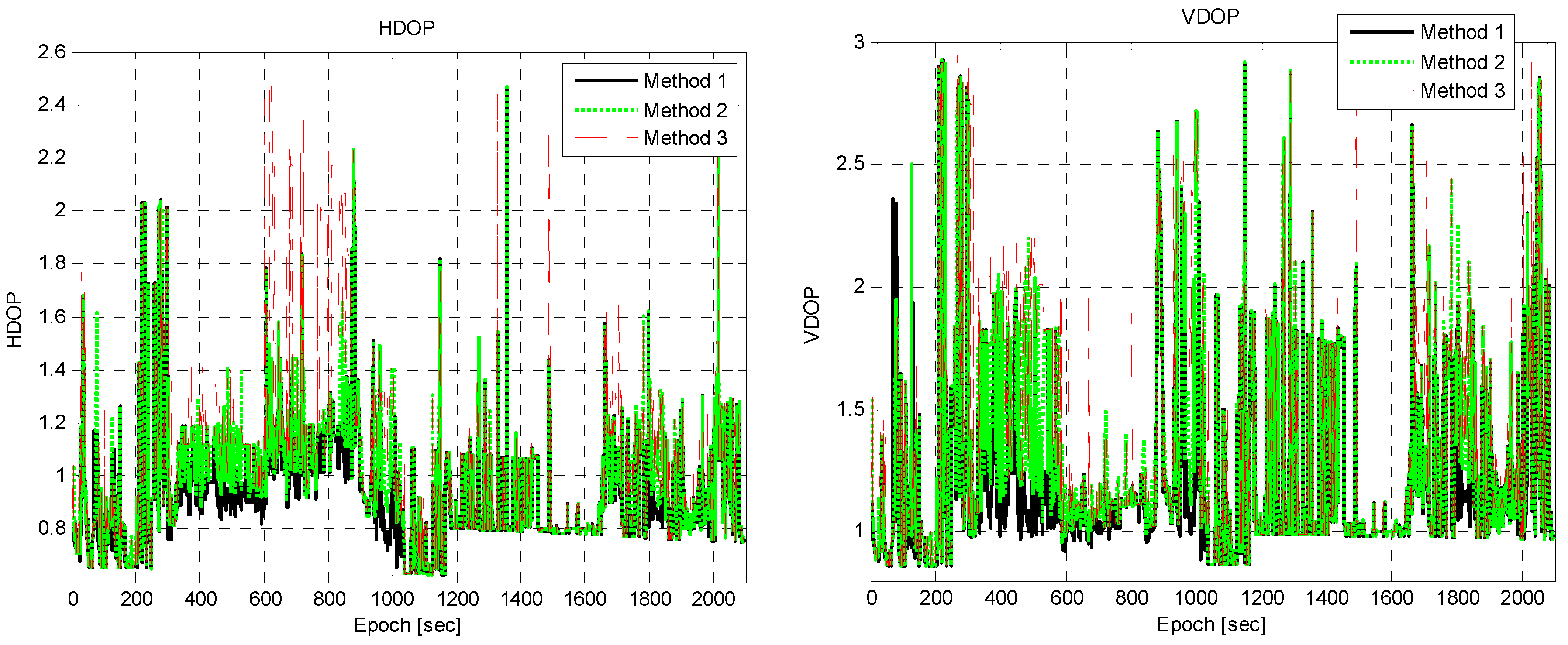
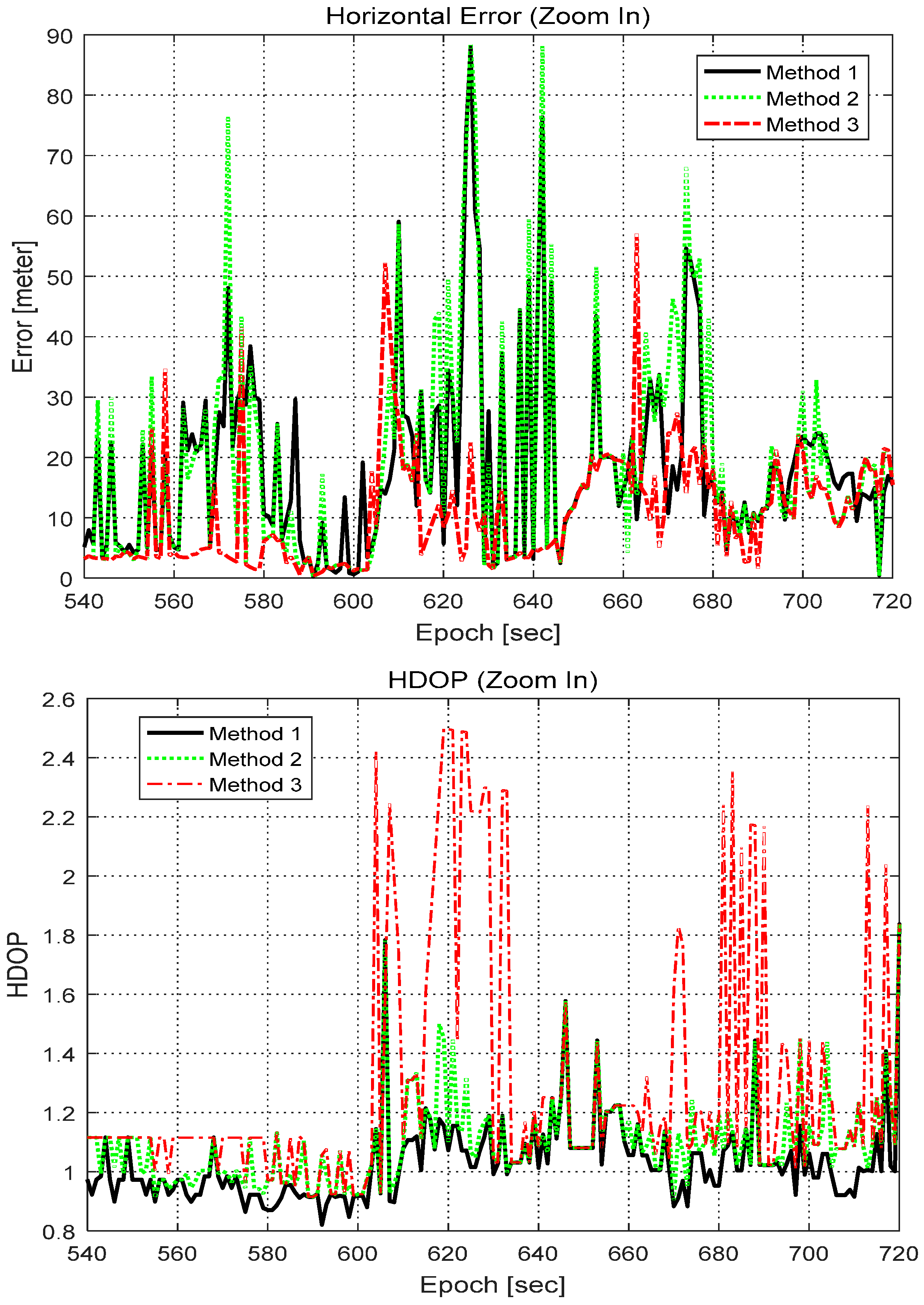
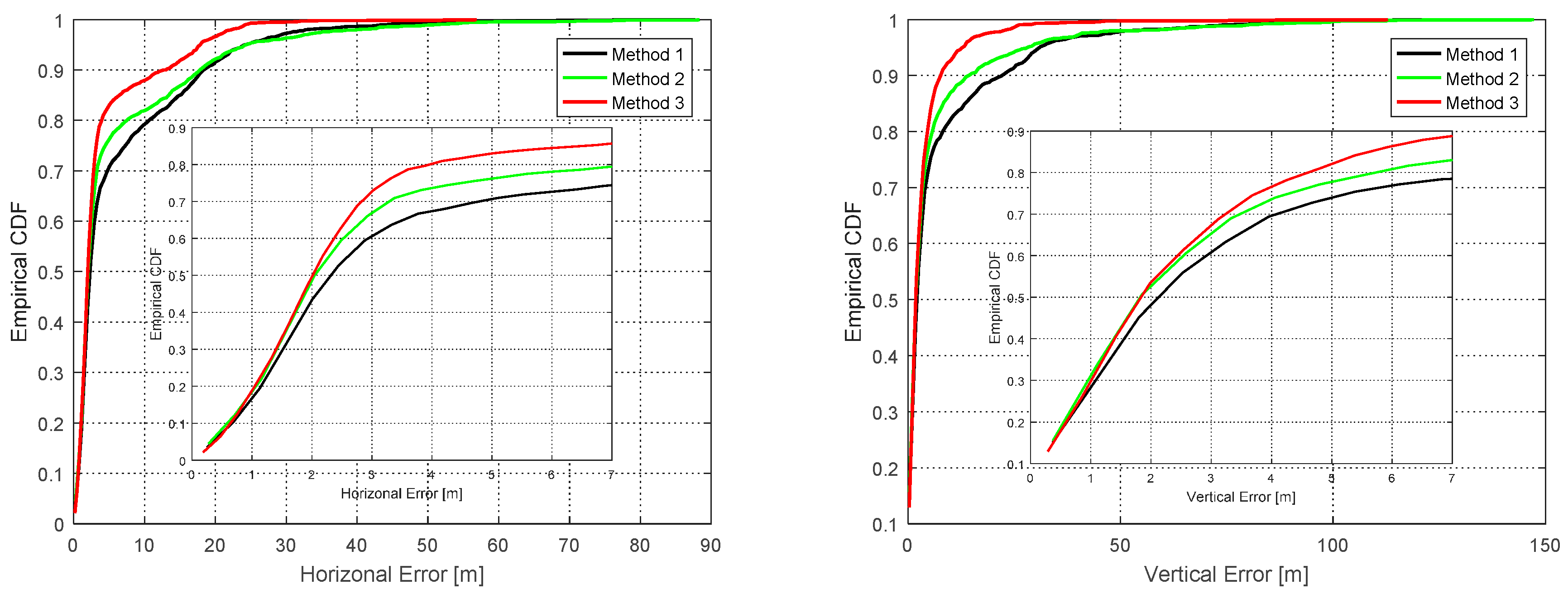
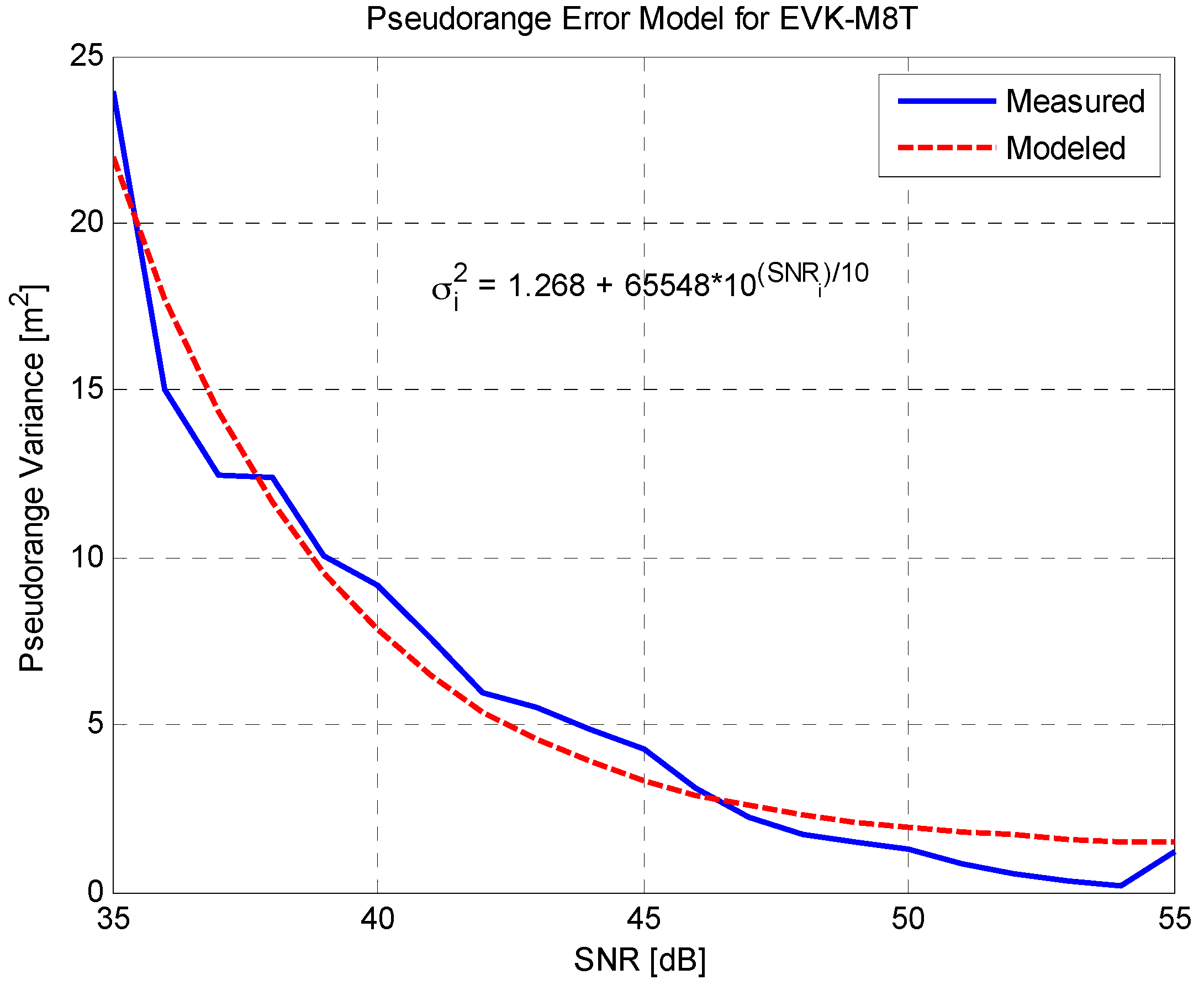
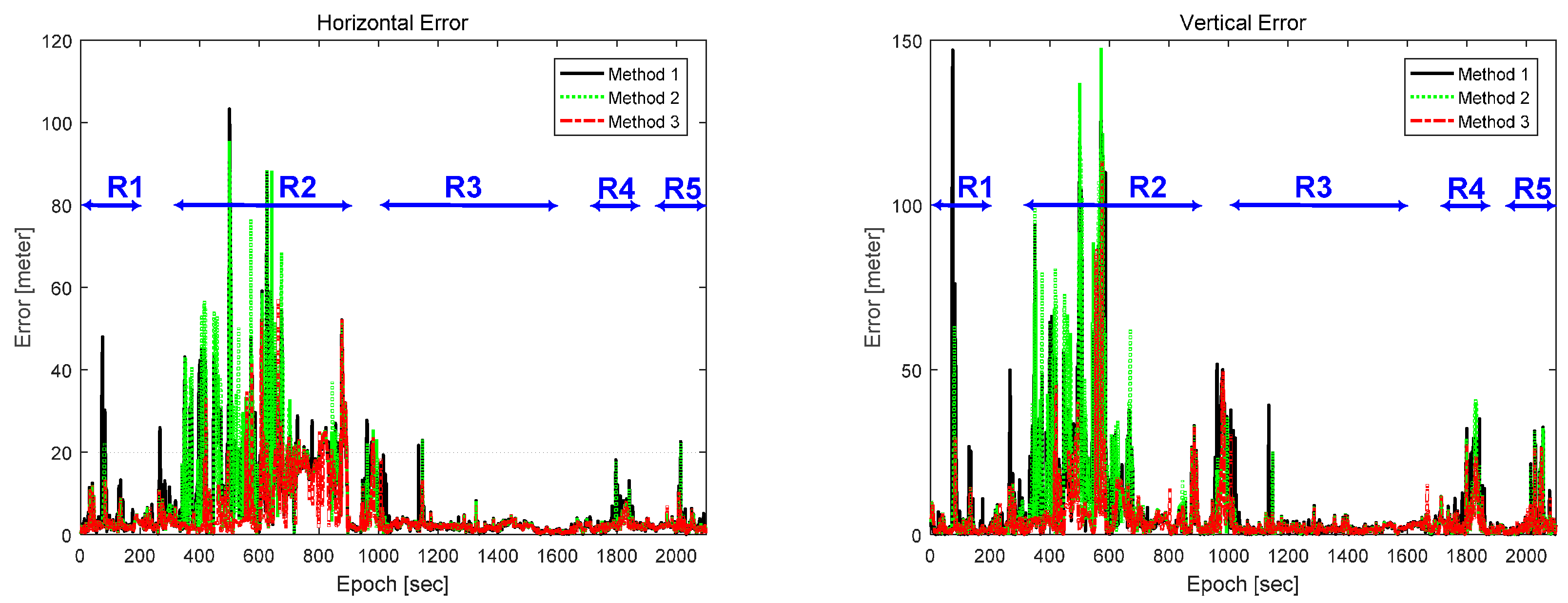
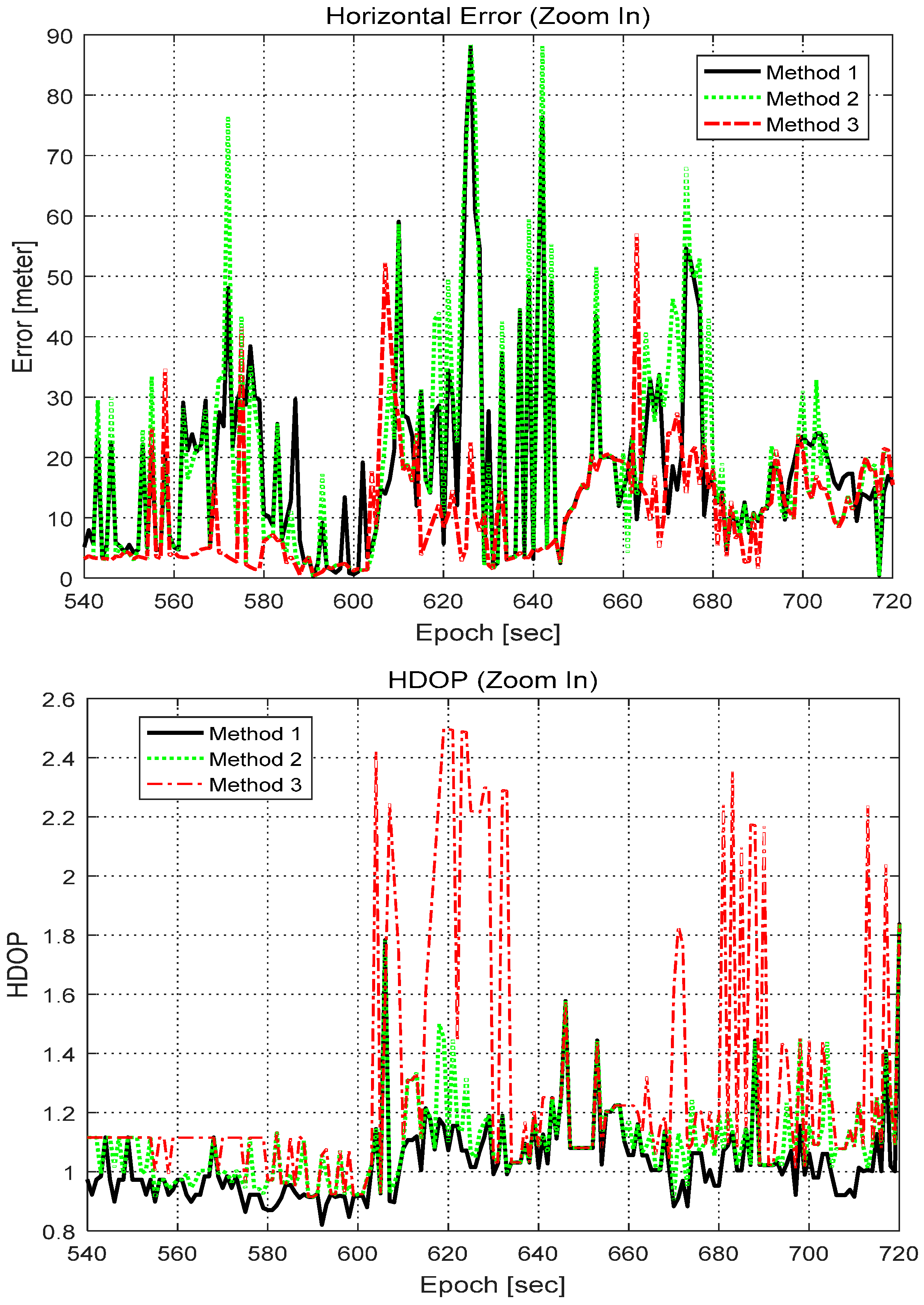
- Method 1: Elevation Angle > 15°, SNR > 35 dB
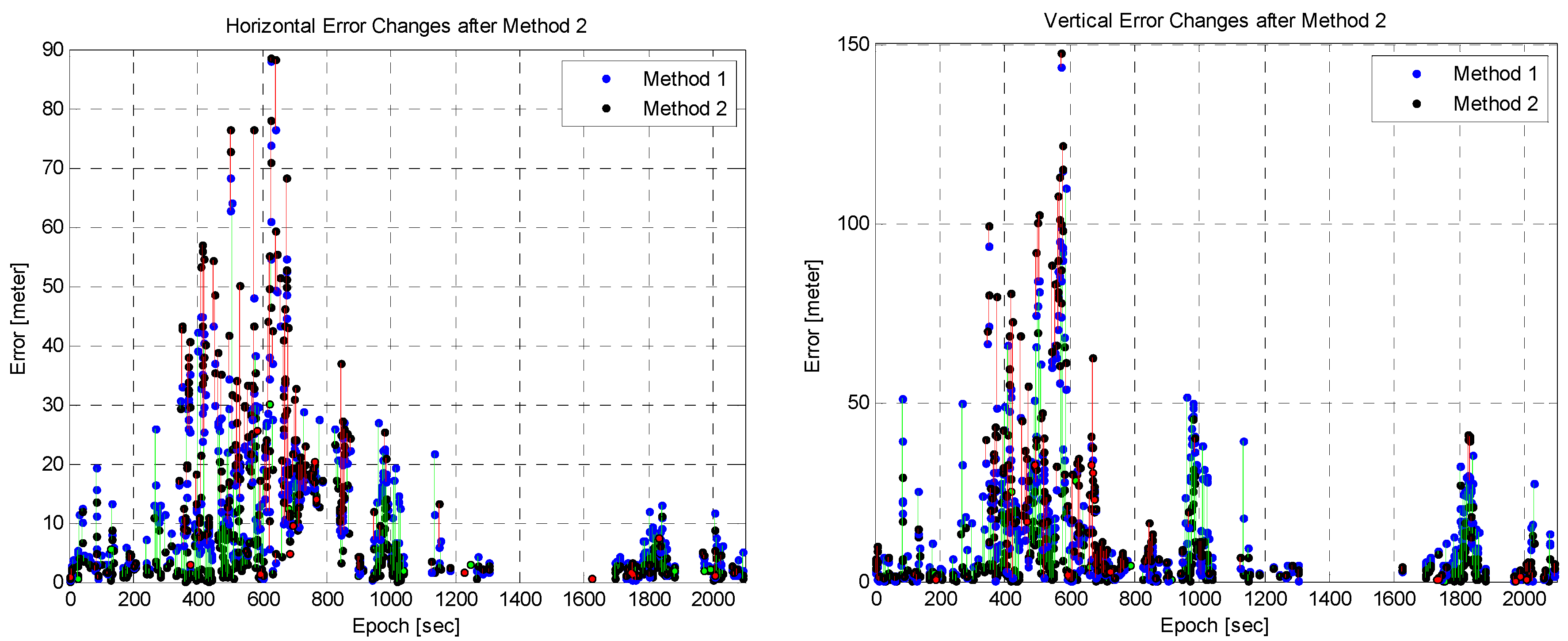
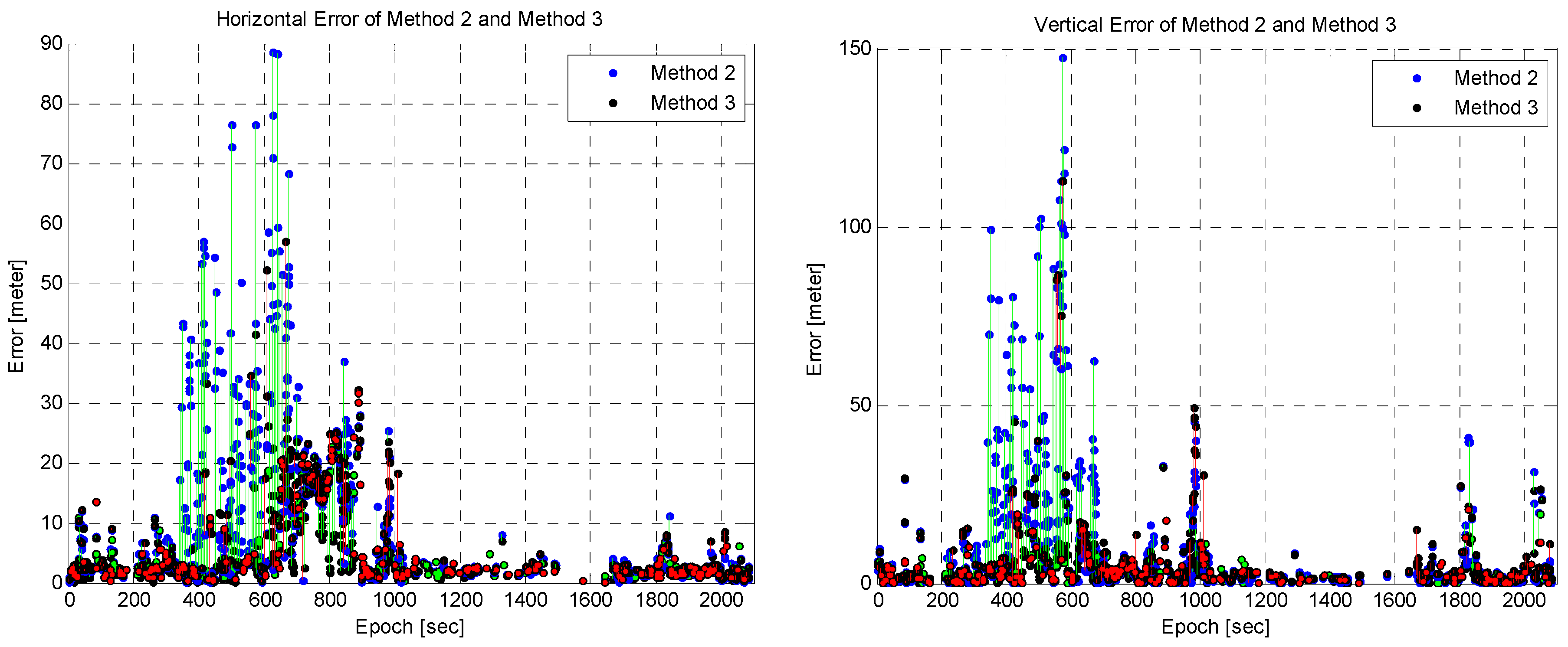
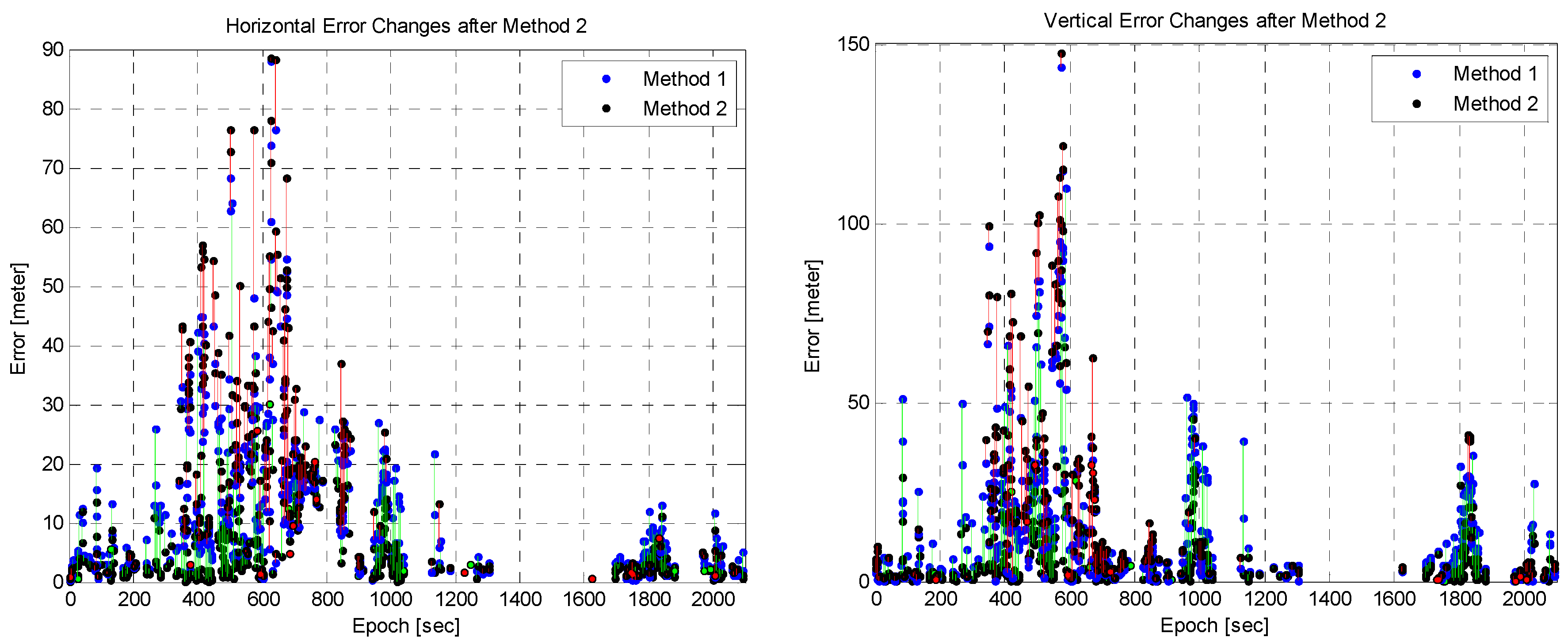
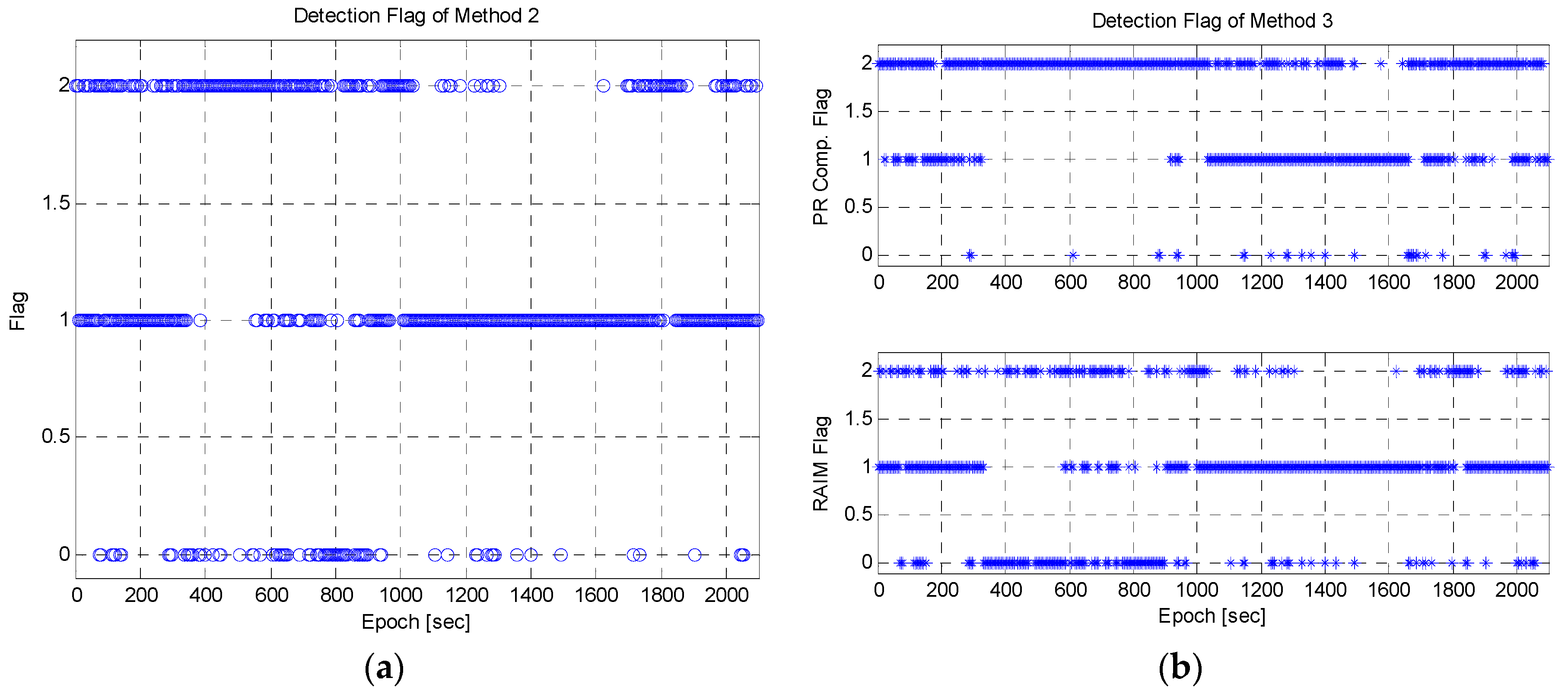
- Method 2: Method 1 + RAIM algorithm
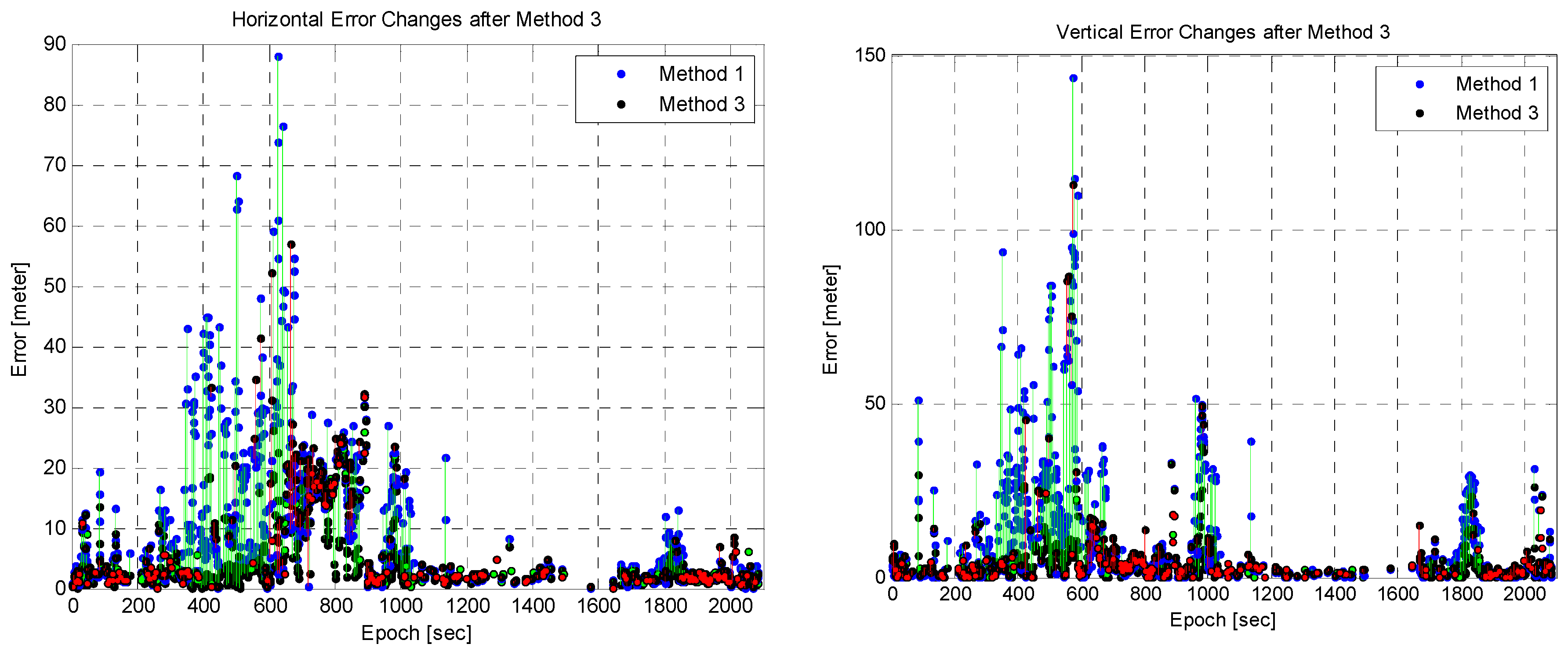
- Method 3: Method 2 + Pseudorange comparison
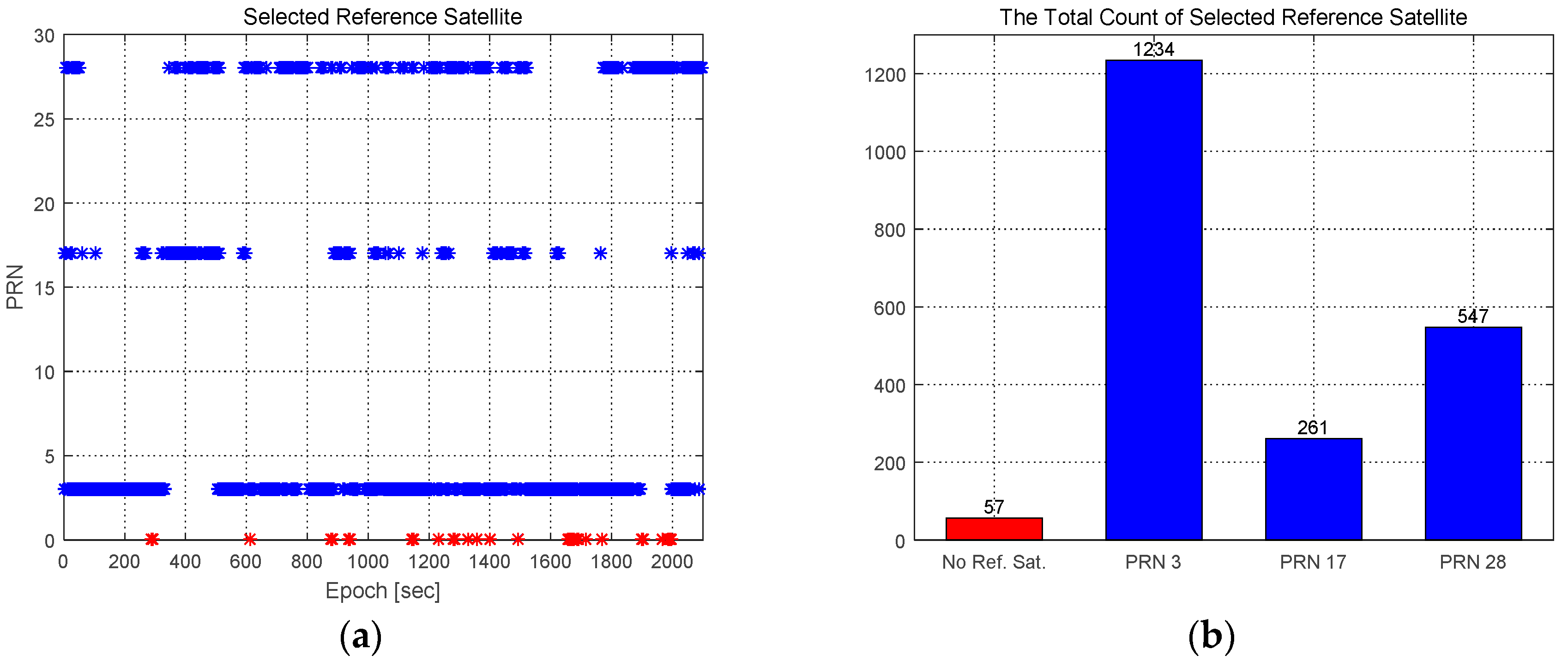
4.2. Experimental Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Urmson, C.; Anhalt, J.; Bagnell, D.; Baker, C.; Bittner, R.; Clark, M.N.; Dolan, J.; Duggins, D.; Galatali, T.; Geyer, C.; et al. Autonomous driving in urban environments: Boss and the Urban Challenge. J. Field Robot. 2008, 25, 425–466. [Google Scholar] [CrossRef]
- Braasch, M.S. Multipath effects. In Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Eds.; AIAA: Washington, DC, USA, 1996; Volume 1, pp. 547–568. [Google Scholar]
- Groves, P.D.; Jiang, Z.; Rudi, M.; Strode, P. A Portfolio Approach to NLOS and Multipath Mitigation in Dense Urban Areas. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 3231–3247.
- Chiang, K.-W.; Duong, T.T.; Liao, J.-K. The Performance Analysis of a Real-Time Integrated INS/GPS Vehicle Navigation System with Abnormal GPS Measurement Elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Davidson, P.; Hautamki, J.; Collin, J.; Takala, J. Improved vehicle positioning in urban environment through integration of GPS and low-cost inertial sensors. In Proceedings of the European Navigation Conference (ENC), Naples, Italy, 3–6 May 2009.
- Meguro, J.; Murata, T.; Takiguchi, J.; Amano, Y.; Hashizume, T. GPS multipath mitigation for urban area using omnidirectional infrared camera. IEEE Trans. Intell. Transp. Syst. 2009, 10, 22–30. [Google Scholar] [CrossRef]
- Suzuki, T.; Kitamura, M.; Amano, Y.; Hashizume, T. Multipath mitigation using omnidirectional infrared camera for tightly coupled GPS/INS integration in urban environments. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation 2011 (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011; pp. 2914–2922.
- Ali, K.; Chen, X.; Dovis, F.; de Castro, D.; Fernández, A.J. Multipath Estimation in Urban Environments from Joint GNSS Receivers and LiDAR Sensors. Sensors 2012, 12, 14592–14603. [Google Scholar] [CrossRef] [PubMed]
- Hsu, L.-T.; Gu, Y.; Kamijo, S. NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models. Sensors 2015, 15, 17329–17349. [Google Scholar] [CrossRef] [PubMed]
- Peyret, F.; Bétaille, D.; Mougel, F. Non-Line-Of-Sight GNSS signal detection using an on-board 3D model of buildings. In Proceedings of the IEEE ITST 2011 11th International Conference on ITS Telecommunications, Saint-Petersburg, Russia, 23–25 August 2011.
- Wang, L.; Groves, P.D.; Ziebart, M. GNSS Shadow Matching: Improving Urban Positioning Accuracy Using a 3D City Model with Optimized Visibility Prediction Scoring. In Proceedings of the ION GNSS 2012, Nashville, TN, USA, 18–21 September 2012.
- Ercek, R.; de Doncker, P.; Grenez, F. Statistical Determination of the PR Error Due to NLOS-Multipath in Urban Canyons. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 1771–1777.
- Zair, S.; Hégarat-Mascle, S.L.; Seignez, E. A-contrario modeling for robust localization using raw GNSS data. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1354–1367. [Google Scholar] [CrossRef]
- Zair, S.; Hégarat-Mascle, S.L.; Seignez, E. Outlier Detection in GNSS Pseudo-Range/Doppler Measurements for Robust Localization. Sensors 2016, 16, 580. [Google Scholar] [CrossRef] [PubMed]
- Borio, D.; Gioia, C. Galileo: The Added Value for Integrity in Harsh Environments. Sensors 2016, 16, 111. [Google Scholar] [CrossRef] [PubMed]
- Schrader, D.K.; Min, B.C.; Matson, E.T.; Dietz, J.E. Real-time averaging of position data from multiple GPS receivers. Measurement 2016, 46, 4282–4292. [Google Scholar] [CrossRef]
- Shetty, A.; Gao, G.X. Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation, Dana Point, CA, USA, 26–28 January 2015; pp. 842–848.
- Nayak, R.A. Reliable and Continuous Urban Navigation Using Multiple GPS Antennas and a Low Cost IMU. Master’s Thesis, University of Calgary, Calgary, AB, Canada, October 2000. [Google Scholar]
- Gleason, S.; Gebre-Egziabher, D. GNSS Applications and Methods; Artech House: Norwood, MA, USA, 2009; pp. 306–324. [Google Scholar]
- Kuusniemi, H.; Wieser, A.; Lachapelle, G.; Takala, J. User-Level Reliability Monitoring in Urban Personal Satellite-Navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1305–1318. [Google Scholar] [CrossRef]
- Wieser, A. Robust and Fuzzy Techniques for Parameter Estimation and Quality Assessment in GPS. Ph.D. Thesis, Technical University Graz, Graz, Austria, July 2001. [Google Scholar]
- Kuusniemi, H. User-Level Reliability and Quality Monitoring in Satellite-Based Personal Navigation. Ph.D. Thesis, Tampere University of Technology, Tampere, Finland, 2005. [Google Scholar]
- Hide, C.; Pinchin, J.; Park, D. Development of a Low Cost Multiple GPS Antenna Attitude System. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 88–95.
- Bevly, D.M.; Gerdes, J.C.; Wilson, C.; Zhang, G. The use of GPS based velocity measurements for improved vehicle state estimation. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000; Volume 4, pp. 2538–2542.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Horizontal Errors (m) | Vertical Errors (m) | Availability (%) | ||||
|---|---|---|---|---|---|---|---|
| Mean | Std | Max | Mean | Std | Max | ||
| Method 1 | 7.04 | 10.29 | 103.2 | 8.05 | 14.91 | 146.97 | 97.9 |
| Method 2 | 6.61 | 10.89 | 95.51 | 6.97 | 14.71 | 147.61 | 97.6 |
| Method 3 | 4.18 | 5.81 | 57.03 | 3.79 | 6.34 | 113.12 | 94.8 |
| Methods | Total Amount of Horizontal Error Changes (m) | Total Amount of Vertical Error Changes (m) | ||
|---|---|---|---|---|
| Reduced | Increased | Reduced | Increased | |
| Method 2 | 2018.0 (407) | 1217.9 (237) | 3807.6 (383) | 1933.6 (261) |
| Method 3 | 5123.6 (784) | 478.1 (413) | 6875.8 (784) | 632.2 (462) |
| Method 3 w.r.t. Method 2 | 4385.1 (722) | 462.3 (475) | 5026.5 (722) | 691.6 (520) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.-H.; Jee, G.-I. Performance Enhancement of Land Vehicle Positioning Using Multiple GPS Receivers in an Urban Area. Sensors 2016, 16, 1688. https://doi.org/10.3390/s16101688
Song J-H, Jee G-I. Performance Enhancement of Land Vehicle Positioning Using Multiple GPS Receivers in an Urban Area. Sensors. 2016; 16(10):1688. https://doi.org/10.3390/s16101688
Chicago/Turabian StyleSong, Jong-Hwa, and Gyu-In Jee. 2016. "Performance Enhancement of Land Vehicle Positioning Using Multiple GPS Receivers in an Urban Area" Sensors 16, no. 10: 1688. https://doi.org/10.3390/s16101688
APA StyleSong, J.-H., & Jee, G.-I. (2016). Performance Enhancement of Land Vehicle Positioning Using Multiple GPS Receivers in an Urban Area. Sensors, 16(10), 1688. https://doi.org/10.3390/s16101688