
Reduction of Kinematic Short Baseline Multipath Effects Based on Multipath Hemispherical Map

 ,
, 
Abstract
:1. Introduction
2. Method
2.1. Theoretical Background of MHM
2.2. Implementation of the MHM Model
3. Experimental Results
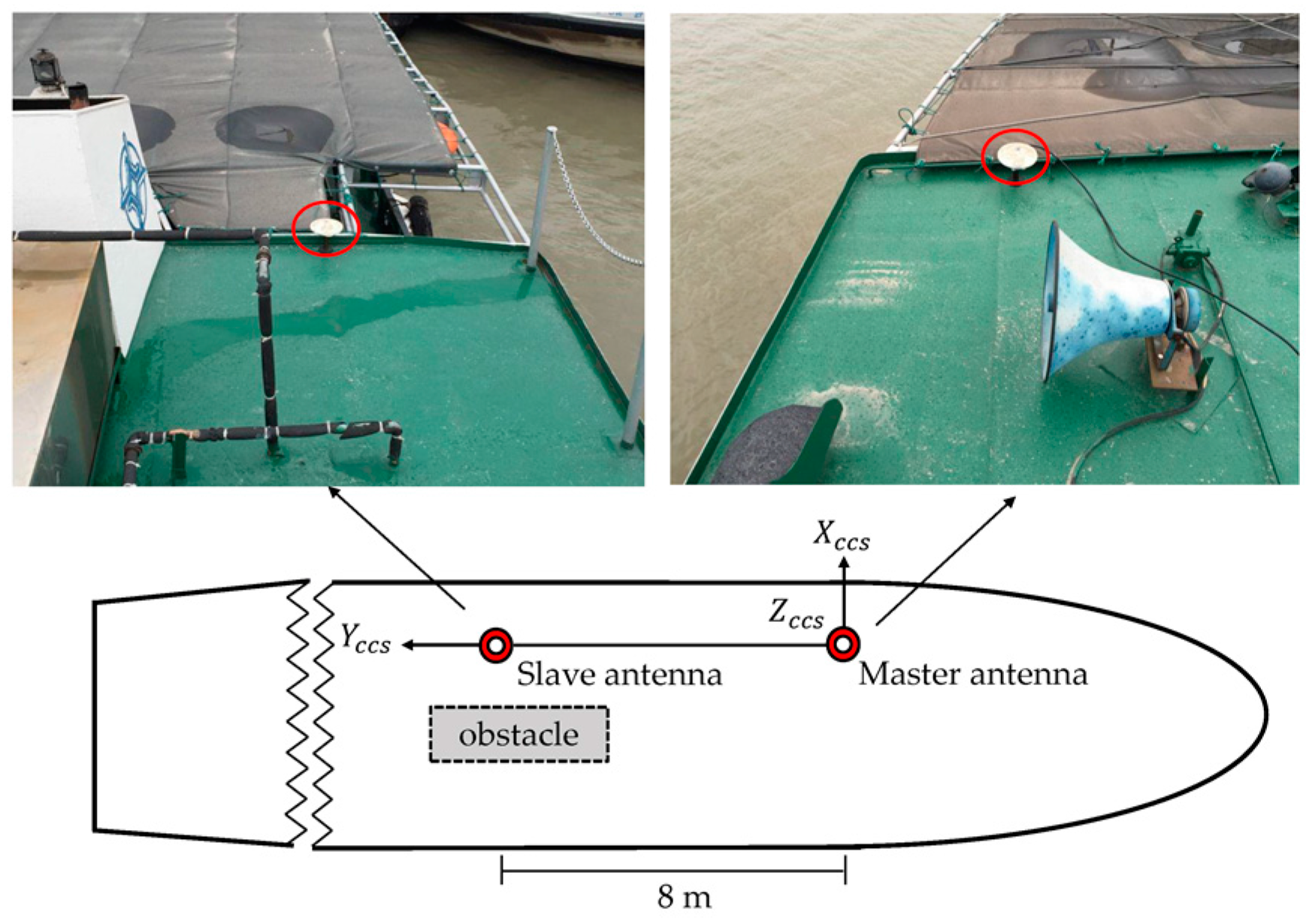
3.1. Static Shipborne Test
3.2. Kinematic Shipborne Test
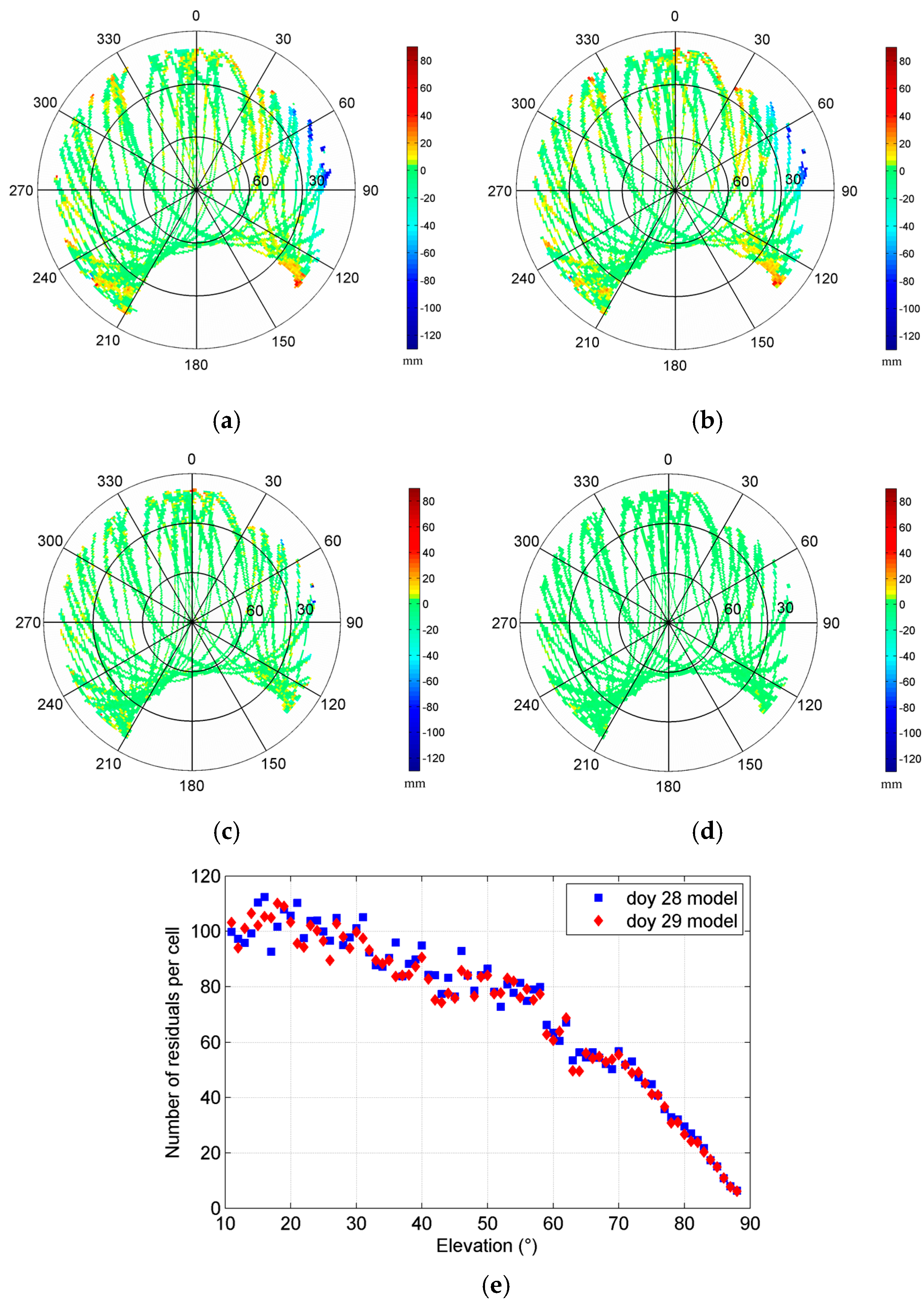
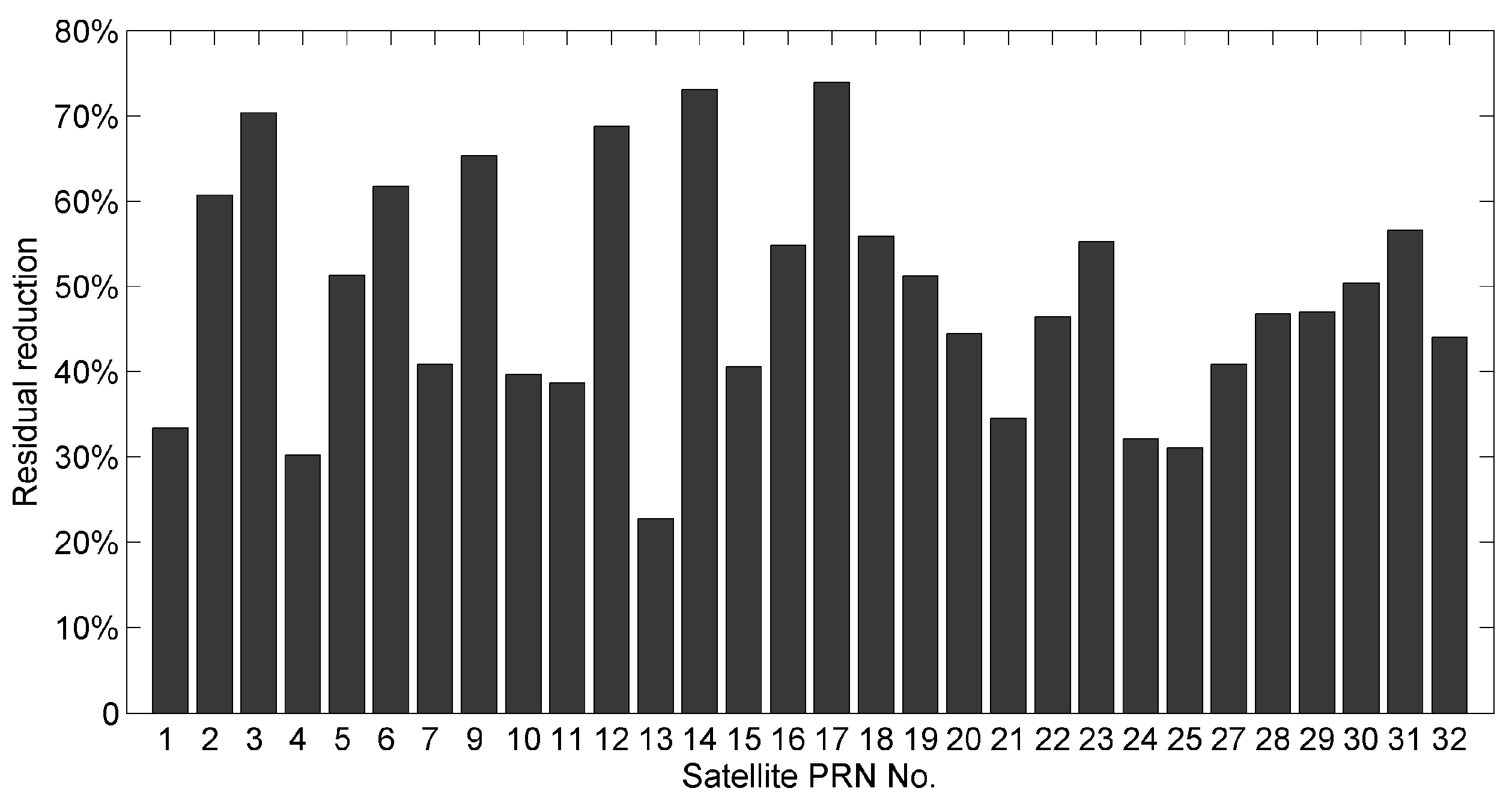
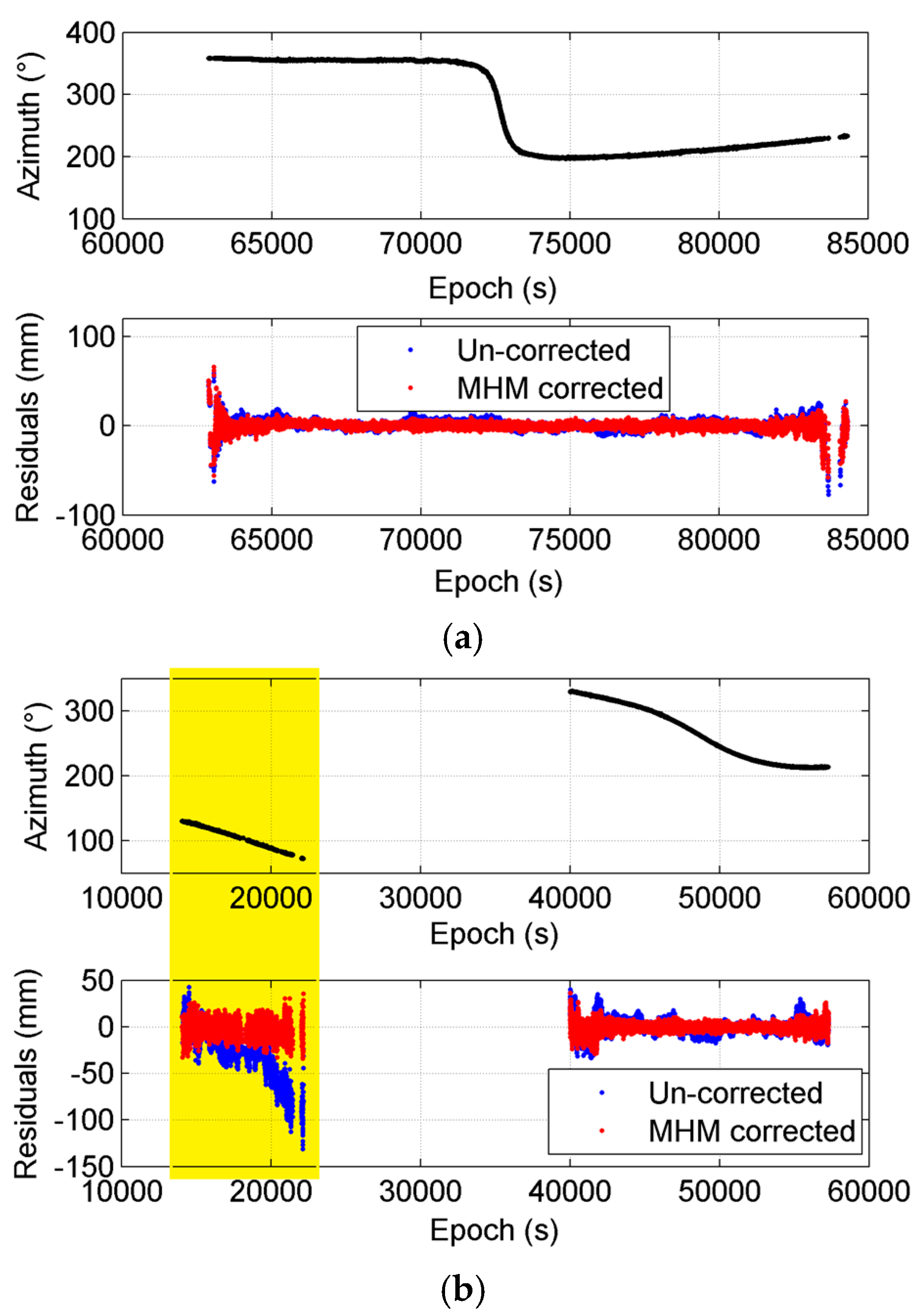
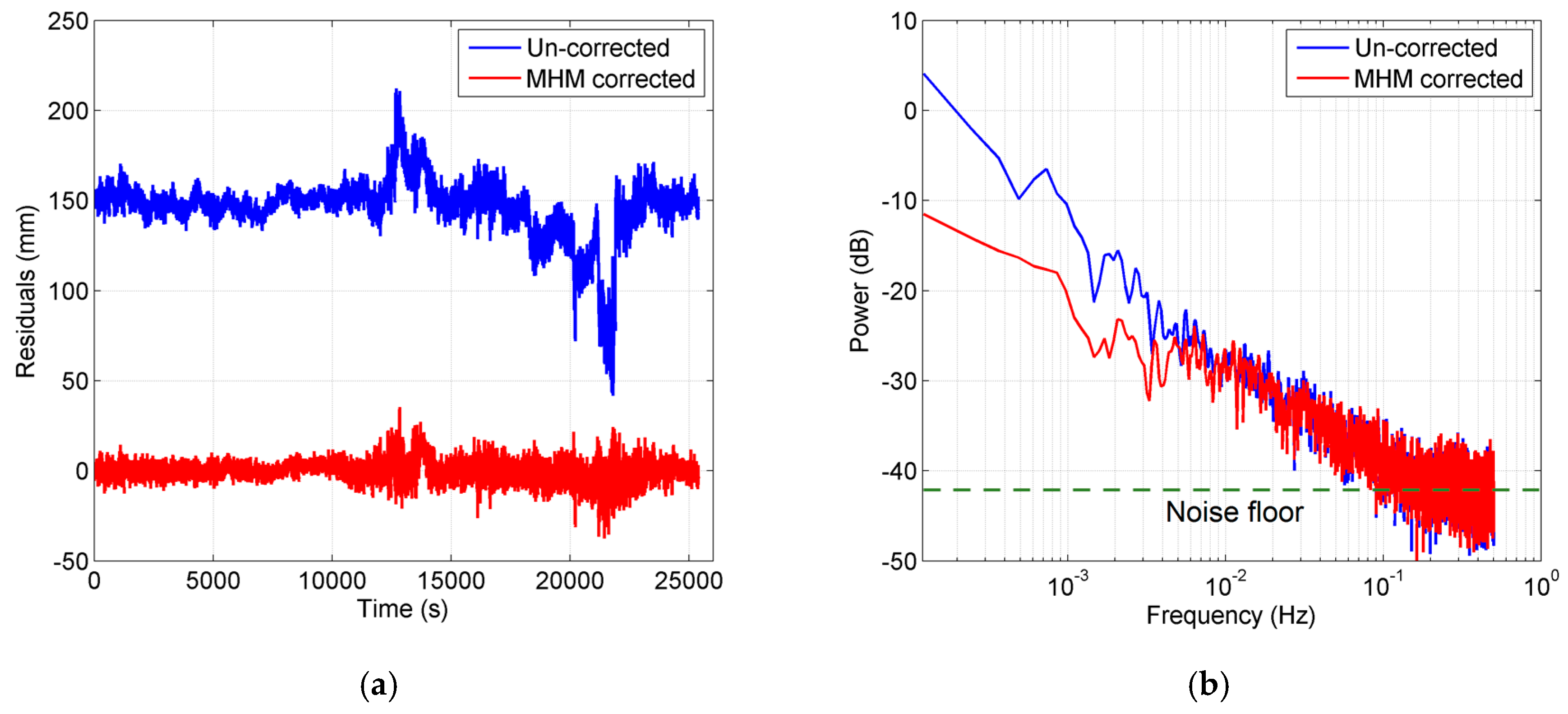
3.2.1. Performance Evaluation of the 8 h Model
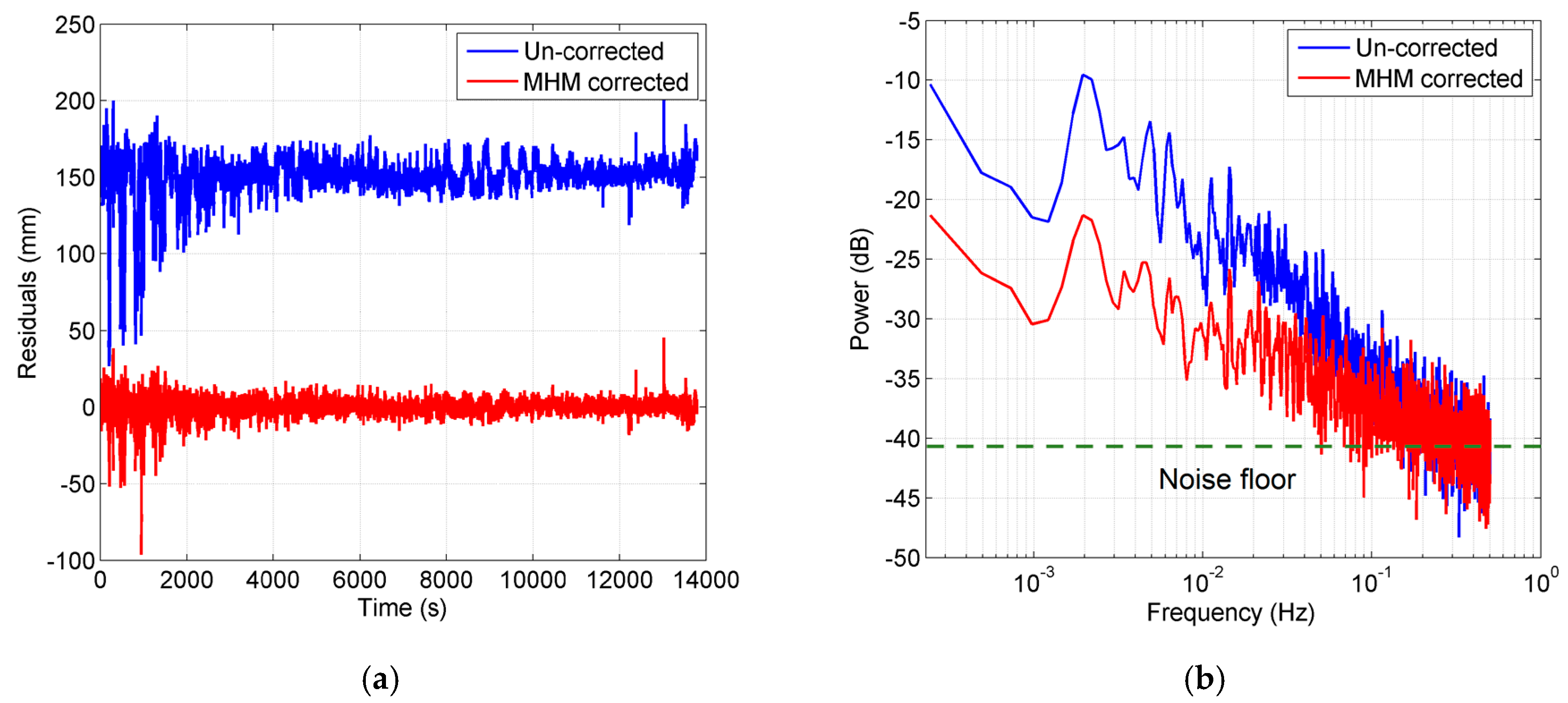
3.2.2. Performance Evaluation of the 5 h Model
3.3. Influence Factors Analysis
3.3.1. Observation Noise
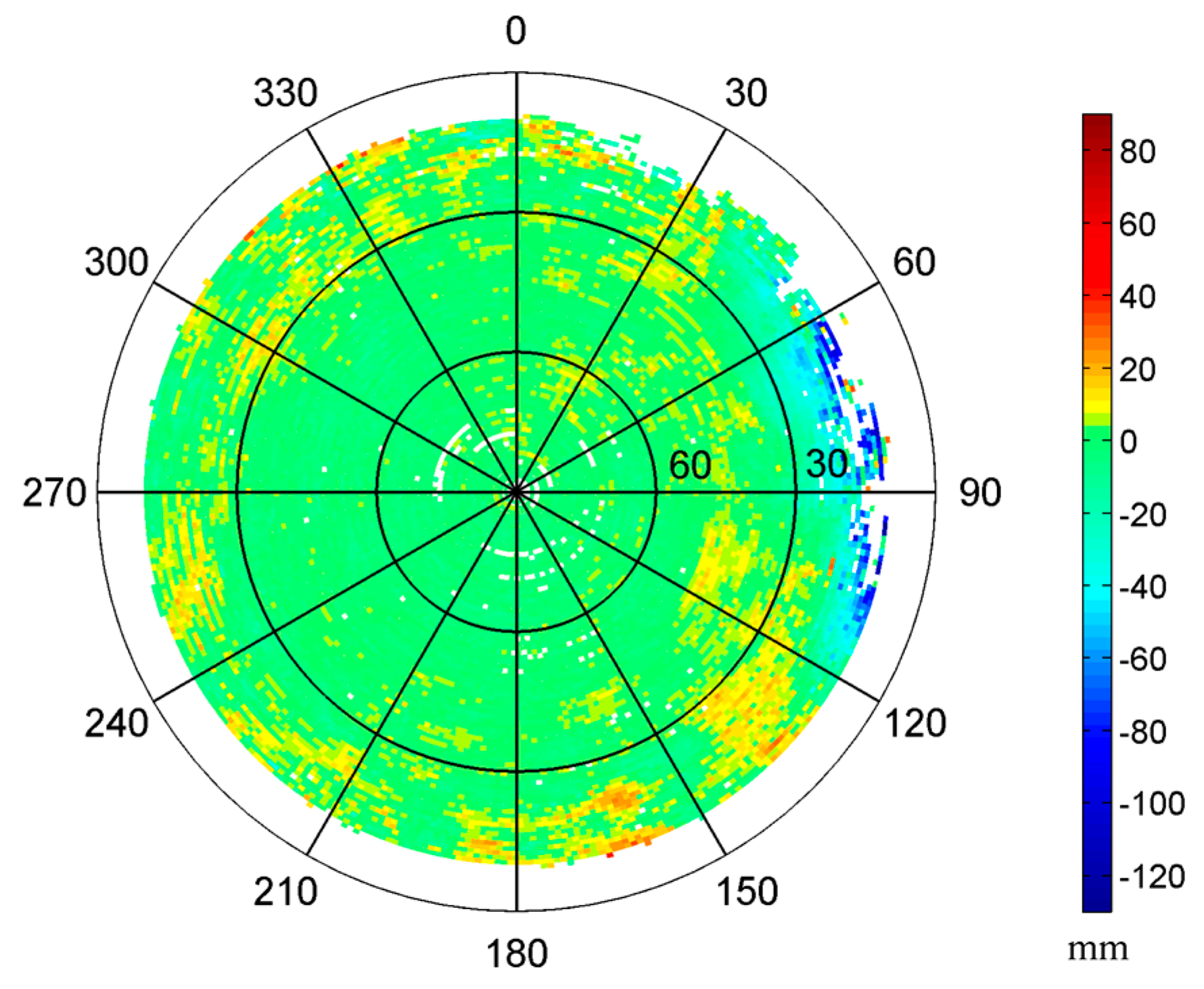
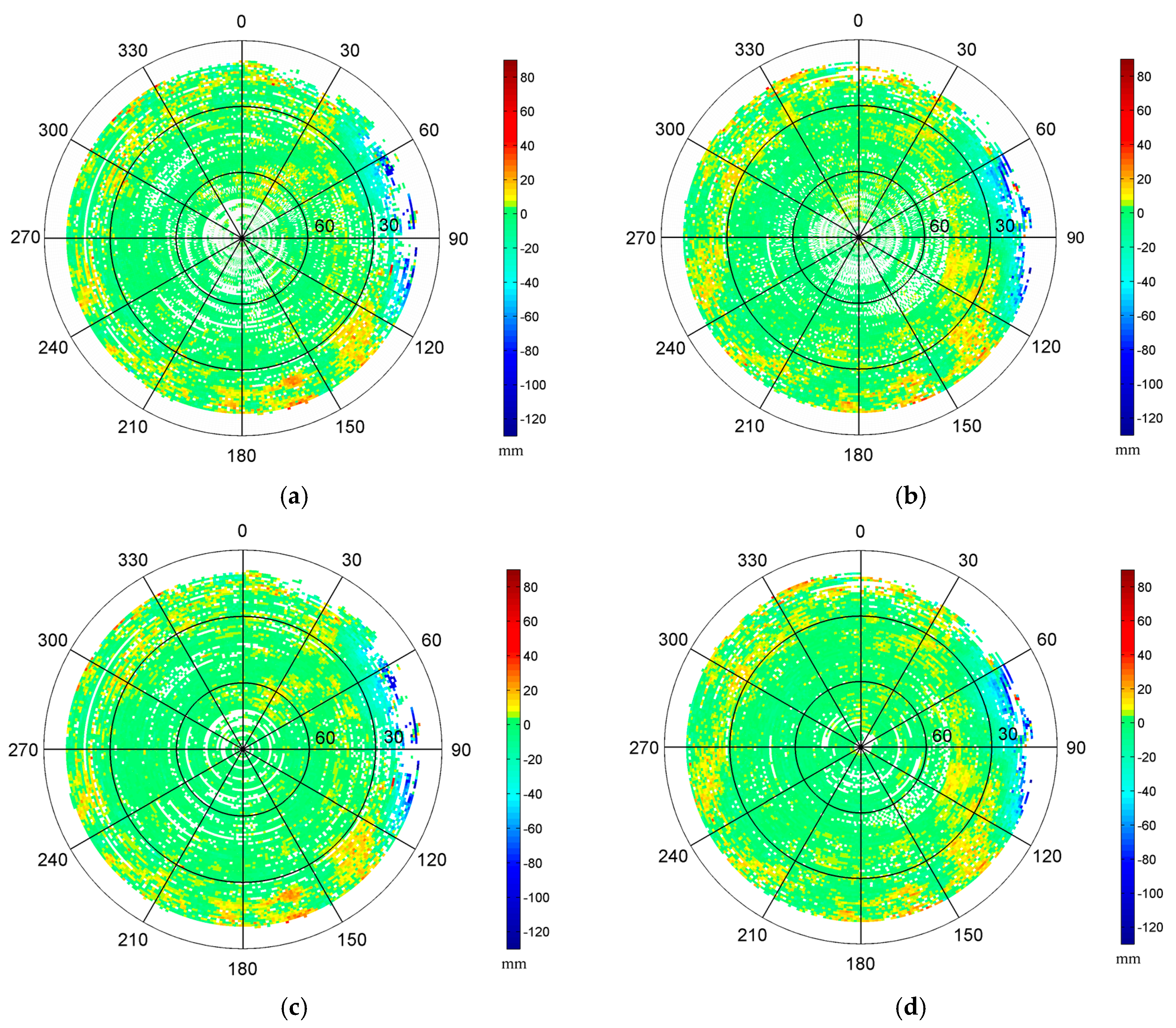
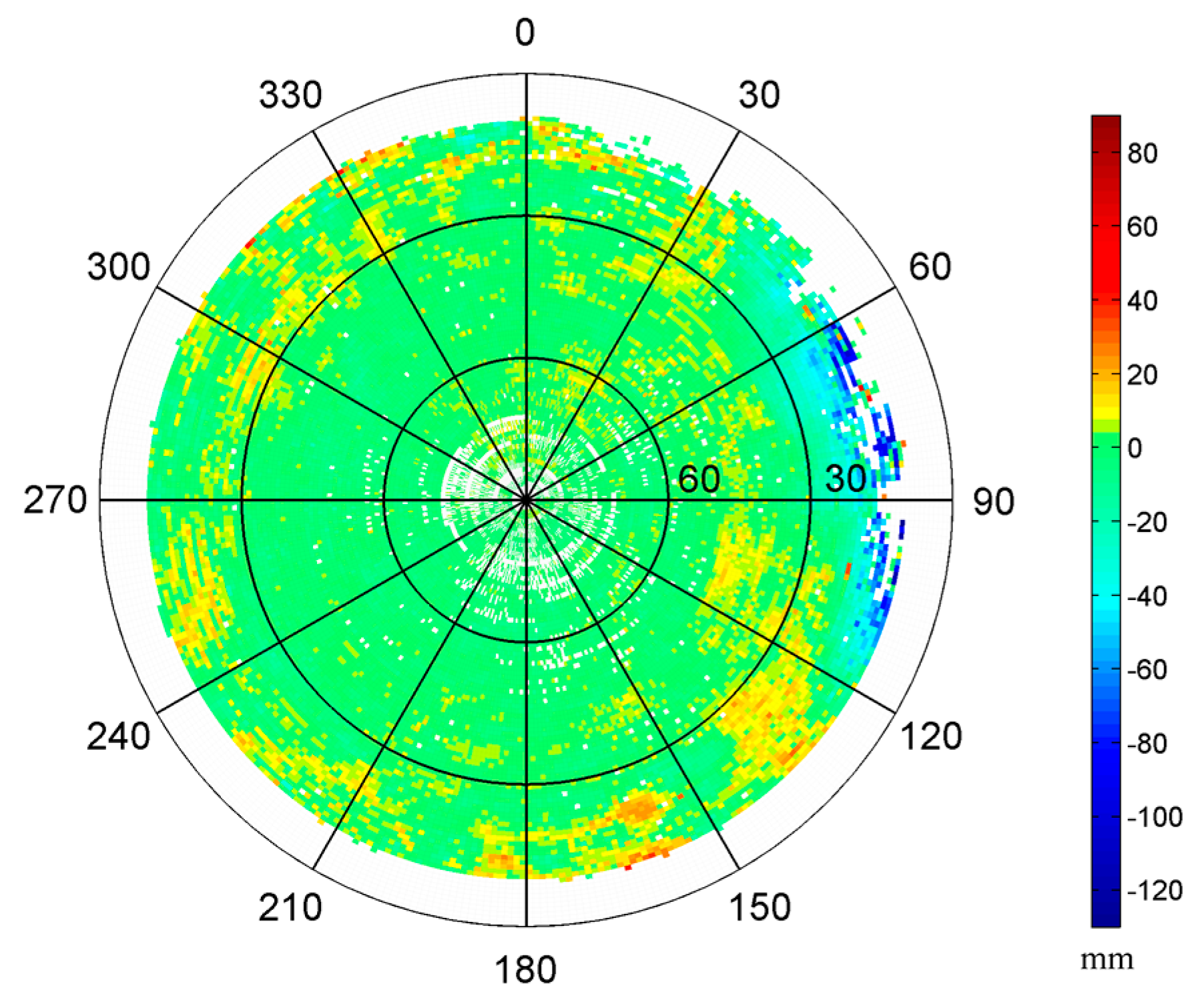
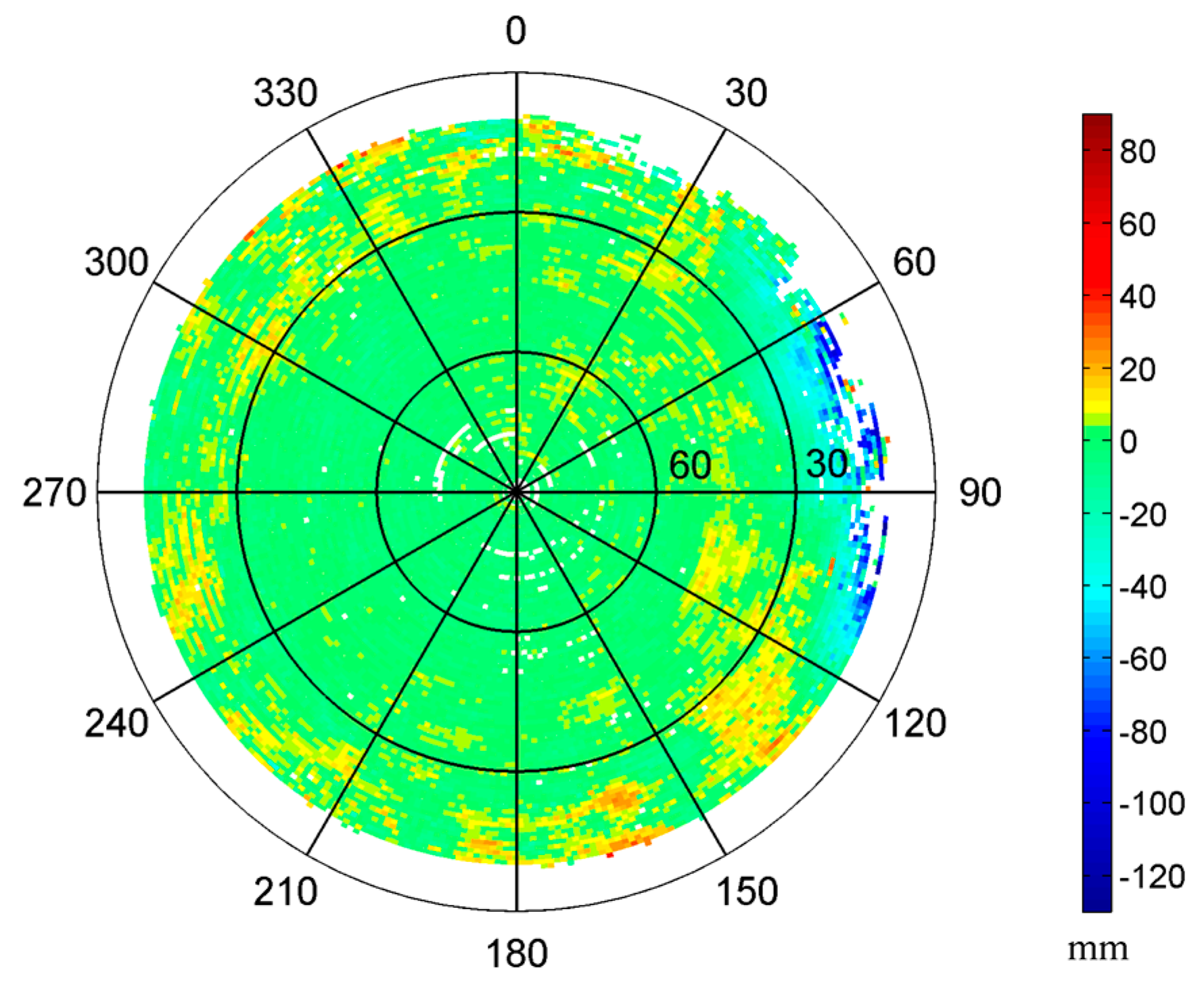
3.3.2. Coverage
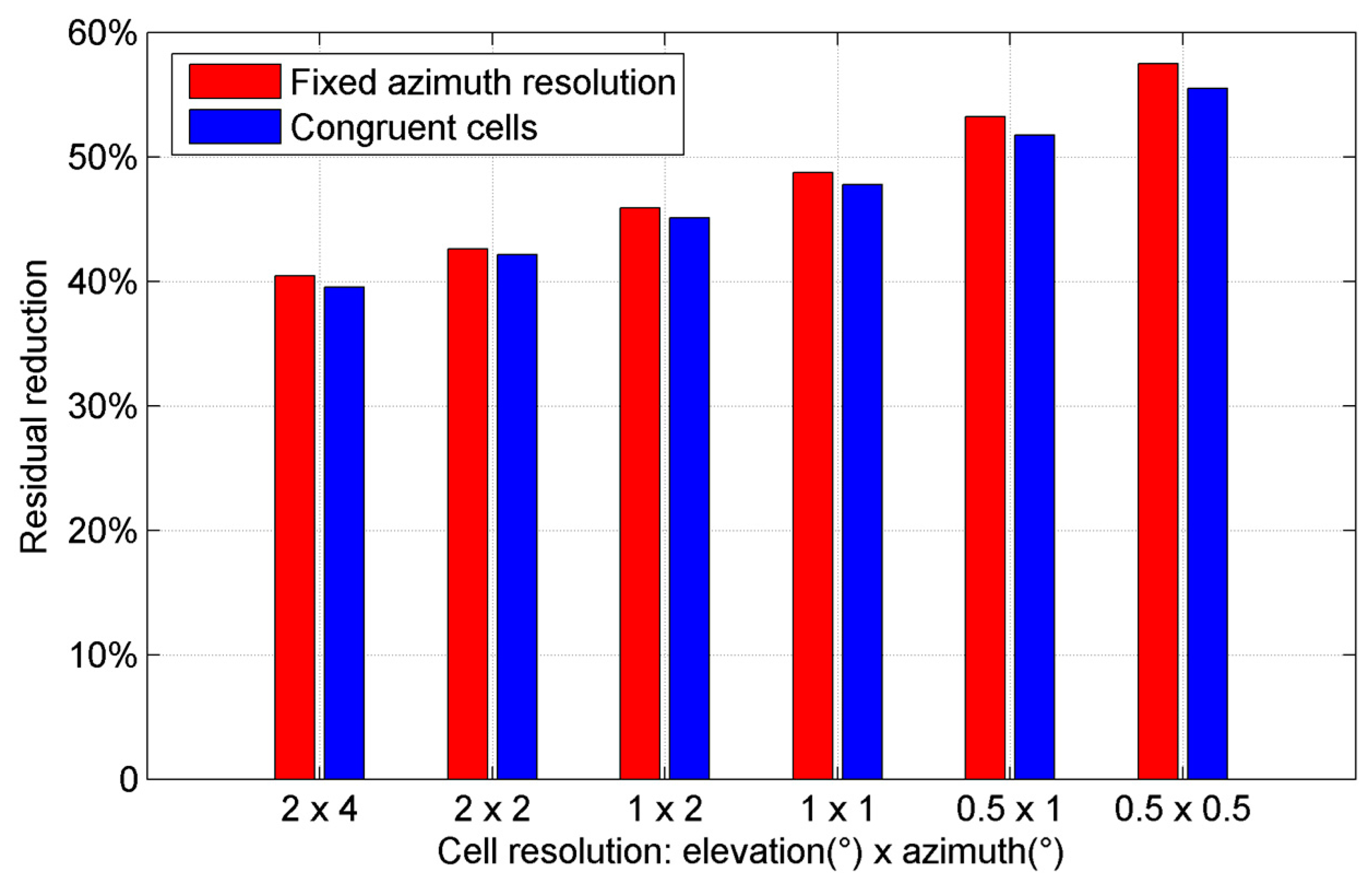
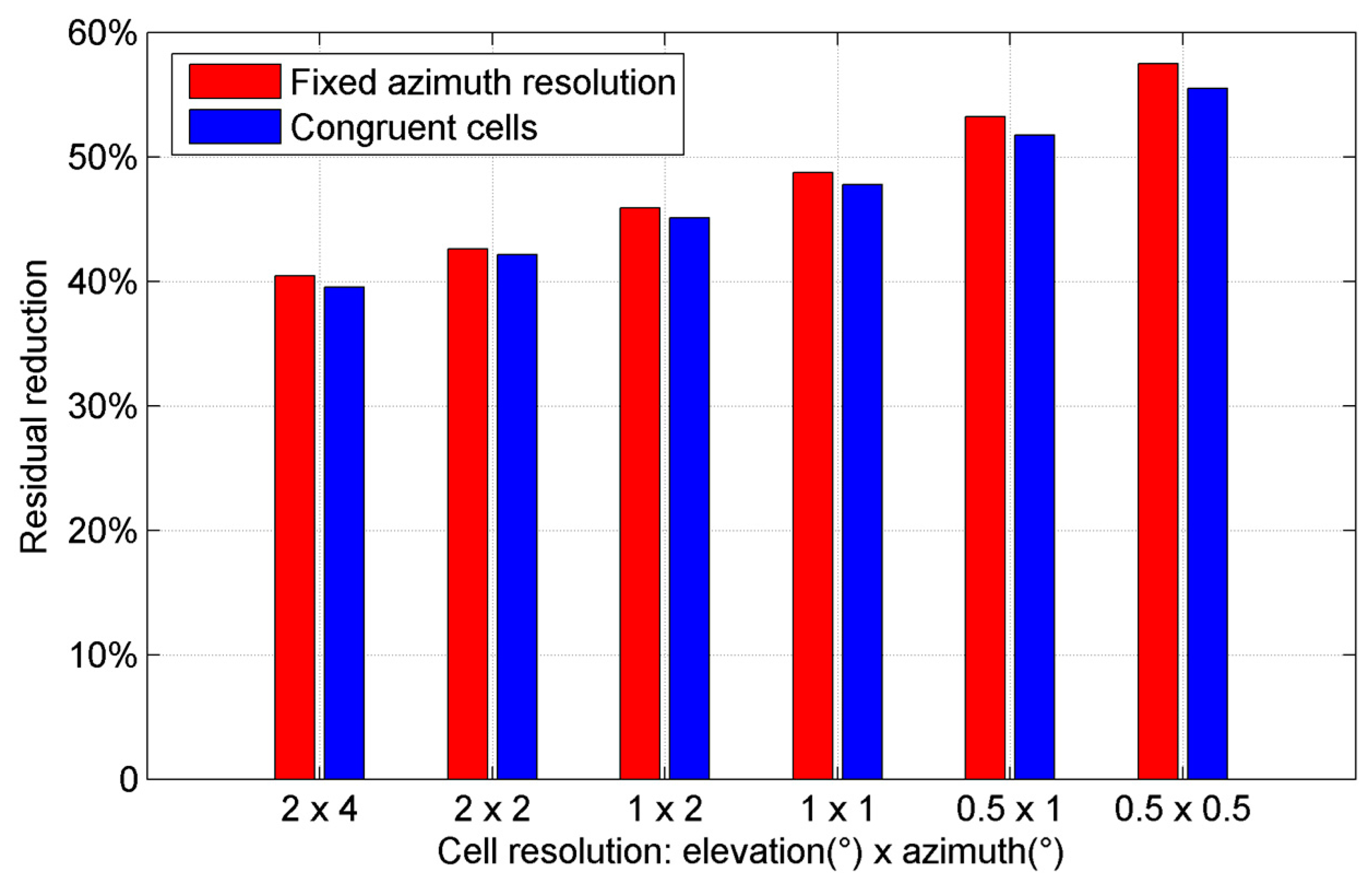
3.3.3. Sparse Resolution
3.3.4. Roll Angle
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Axelrad, P.; Comp, C.J.; Macdoran, P.F. SNR-based multipath error correction for GPS differential phase. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 650–660. [Google Scholar] [CrossRef]
- Comp, C.J.; Axelrad, P. Adaptive snr-based carrier phase multipath mitigation technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 264–276. [Google Scholar] [CrossRef]
- Lau, L.; Mok, E. Improvement of GPS relative positioning accuracy by using SNR. J. Surv. Eng. 1999, 125, 185–202. [Google Scholar] [CrossRef]
- Satirapod, C.; Ogaja, C.; Wang, J.; Rizos, C. An approach to GPS analysis incorporating wavelet decomposition. J. Artif. Satell. 2001, 36, 27–35. [Google Scholar]
- Satirapod, C.; Rizos, C. Multipath mitigation by wavelet analysis for GPS base station applications. J. Surv. Rev. 2005, 38, 2–10. [Google Scholar] [CrossRef]
- Souza, E.M.; Monico, J.F.G.; Polezel, W.G.C.; Pagamisse, A. An effective wavelet method to detect and mitigate low-frequency multipath effects. Int. Assoc. Geod. Symp. 2007, 132, 179–184. [Google Scholar]
- Zhong, P.; Ding, X.L.; Zheng, D.W.; Chen, W.; Huang, D.F. Adaptive wavelet transform based on cross-validation method and its application to GPS multipath mitigation. GPS Solut. 2008, 12, 109–117. [Google Scholar] [CrossRef]
- Ge, L.; Han, S.; Rizos, C. Multipath mitigation of continuous GPS measurements using an adaptive filter. GPS Solut. 2000, 4, 19–30. [Google Scholar] [CrossRef]
- Zheng, D.W.; Zhong, P.; Ding, X.L.; Chen, W. Filtering GPS time-series using a Vondrak filter and cross-validation. J. Geod. 2005, 79, 363–369. [Google Scholar] [CrossRef]
- Kim, D.; Langley, R.B. Mitigation of GPS Carrier Phase Multipath Effects in Real-Time Kinematic Applications. In Proceedings of the ION GPS 2001, Salt Lake City, UT, USA, 11–14 September 2001; pp. 2144–2152.
- Genrich, J.; Bock, Y. Rapid resolution of crustal motion at short ranges with the global positioning system. J. Geophys. Res. 1992, 97, 3261–3269. [Google Scholar] [CrossRef]
- Bock, Y.; Nikolaidis, R.M.; Jonge, P.J.; Michael, B. Instantaneous geodetic positioning at medium distances with the global positioning system. J. Geophys. Res. 2000, 105, 28223–28254. [Google Scholar] [CrossRef]
- Choi, K.; Bilich, A.; Larson, K.M.; Axelrad, P. Modified sidereal filtering: implications for high-rate GPS positioning. Geophys. Res. Lett. 2004, 31, 178–198. [Google Scholar] [CrossRef]
- Nikolaidis, R.M.; Bock, Y.; Jonge, P.J.D.; Shearer, P.; Agnew, D.C.; Domselaar, M.V. Seismic wave observations with the global positioning system. J. Geophys. Res. 2001, 106, 21897–21916. [Google Scholar] [CrossRef]
- Axelrad, P.; Larson, K.; Jones, B. Use of the correct satellite repeat period to characterize and reduce site-specific multipath errors. In Proceedings of the ION GNSS 2005, Long Beach, CA, USA, 13–16 September 2005; pp. 205–209.
- Ragheb, A.E.; Clarke, P.J.; Edwards, S.J. GPS sidereal filtering: coordinate-and carrier-phase-level strategies. J. Geod. 2007, 81, 325–335. [Google Scholar] [CrossRef]
- Zhong, P.; Ding, X.; Yuan, L.; Xu, Y.; Kwok, K.; Chen, Y. Sidereal filtering based on single differences for mitigating GPS multipath effects on short baselines. J. Geod. 2010, 84, 145–158. [Google Scholar] [CrossRef]
- Zheng, B.; Zhou, N.; Ou, G. Study on elimination of multipath error in PPP based on sidereal filtering. J. Geod. Geodyn. 2014, 34, 178–182. [Google Scholar]
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for GPS precise point positioning. GPS Solut. 2016, 20, 111–122. [Google Scholar] [CrossRef]
- Sundström, J. Evaluation of High Rate Real Time GPS Based Tsunami Warning System. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2009. [Google Scholar]
- Blewitt, G.; Hammond, W.C.; Kreemer, C.; Plag, H.P.; Stein, S.; Okal, E. GPS for real-time earthquake source determination and tsunami warning systems. J. Geod. 2009, 83, 335–343. [Google Scholar] [CrossRef]
- Ragheb, A.E.; Edwards, S.J.; Clarke, P.J. Using Filtered and Semicontinuous High Rate GPS for Monitoring Deformations. J. Surv. Eng. 2010, 136, 72–79. [Google Scholar] [CrossRef]
- Assiadi, M.; Edwards, S.J.; Clarke, P.J. Enhancement of the accuracy of single-epoch GPS positioning for long baselines by local ionospheric modelling. GPS Solut. 2013, 18, 453–460. [Google Scholar] [CrossRef]
- Cohen, C.E.; Parkinson, B.W. Mitigating multipath error in GPS-based attitude determination. In Proceedings of the Annual Rocky Mountain Guidance and Control Conference, Keystone, CO, USA, 2–6 February 1991; pp. 53–68.
- Lambert, W.; Manja, M. Carrier phase multipath calibration of GPS reference stations. Navigation. 2001, 48, 112–124. [Google Scholar]
- Moore, M.; Watson, C.; King, M.; Mcclusky, S.; Tregoning, P. Empirical modelling of site-specific errors in continuous GPS data. J. Geod. 2014, 88, 887–900. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Luo, X.; Knöpfler, A.; Mayer, M. Generating statistically robust multipath stacking maps using congruent cells. GPS Solut. 2015, 19, 83–92. [Google Scholar] [CrossRef]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geod. 2016, 90, 255–262. [Google Scholar] [CrossRef]
- Cohen, C. Attitude Determination Using GPS: Development of an All Solid-State Guidance, Navigation, and Control Sensor for Air and Space Vehicles Based on the Global Positioning System. Ph.D Thesis, Stanford University, Stanford, CA, USA, 1993. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. Solid Earth 2004, 109. [Google Scholar] [CrossRef]
- Shepard, D. A two-dimensional interpolation function for irregularly-spaced data. In Proceedings of the 1968 23rd ACM National Conference, Las Vegas, NV, USA, 27–29 August 1968; pp. 517–524.
- Krige, D.G. A Statistical Approach to Some Basic Mine Valuation Problems on Witwatersrand. J. Chem. Metall. Min. Soc. S. Afr. 1951, 52, 119–139. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coverage | 100% | 80% | 50% | 30% | |
|---|---|---|---|---|---|
| Residual Reduction | |||||
| Static Shipborne Test | 55.77% | 51.38% | 40.90% | 27.10% | |
| Kinematic Shipborne Test | 48.74% | 44.76% | 35.00% | 24.96% | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, M.; Chen, W.; Dong, D.; Song, L.; Wang, M.; Wang, Z.; Zhou, F.; Zheng, Z.; Yu, C. Reduction of Kinematic Short Baseline Multipath Effects Based on Multipath Hemispherical Map. Sensors 2016, 16, 1677. https://doi.org/10.3390/s16101677
Cai M, Chen W, Dong D, Song L, Wang M, Wang Z, Zhou F, Zheng Z, Yu C. Reduction of Kinematic Short Baseline Multipath Effects Based on Multipath Hemispherical Map. Sensors. 2016; 16(10):1677. https://doi.org/10.3390/s16101677
Chicago/Turabian StyleCai, Miaomiao, Wen Chen, Danan Dong, Le Song, Minghua Wang, Zhiren Wang, Feng Zhou, Zhengqi Zheng, and Chao Yu. 2016. "Reduction of Kinematic Short Baseline Multipath Effects Based on Multipath Hemispherical Map" Sensors 16, no. 10: 1677. https://doi.org/10.3390/s16101677
APA StyleCai, M., Chen, W., Dong, D., Song, L., Wang, M., Wang, Z., Zhou, F., Zheng, Z., & Yu, C. (2016). Reduction of Kinematic Short Baseline Multipath Effects Based on Multipath Hemispherical Map. Sensors, 16(10), 1677. https://doi.org/10.3390/s16101677