
Vision/INS Integrated Navigation System for Poor Vision Navigation Environments



Abstract
:1. Introduction
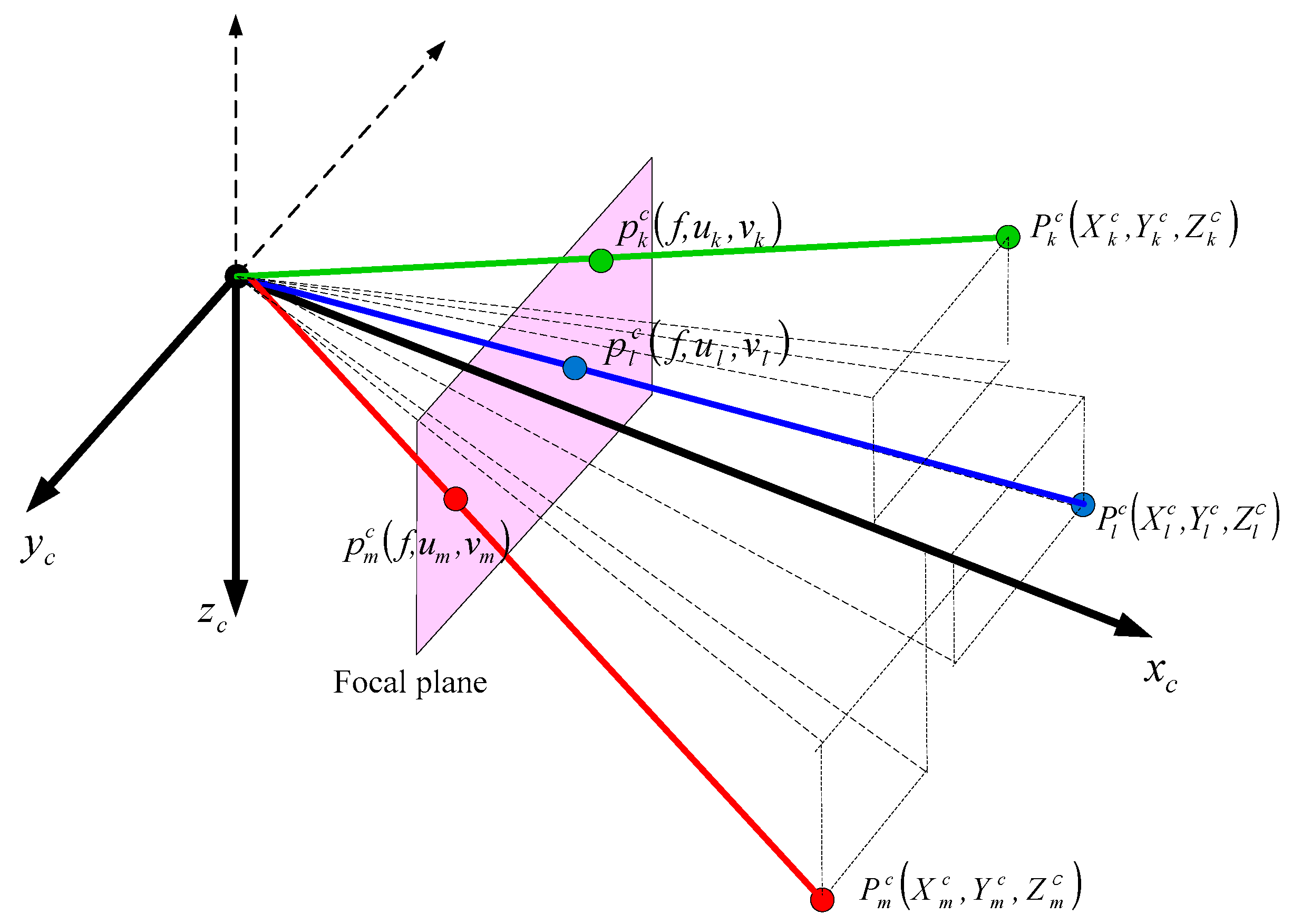
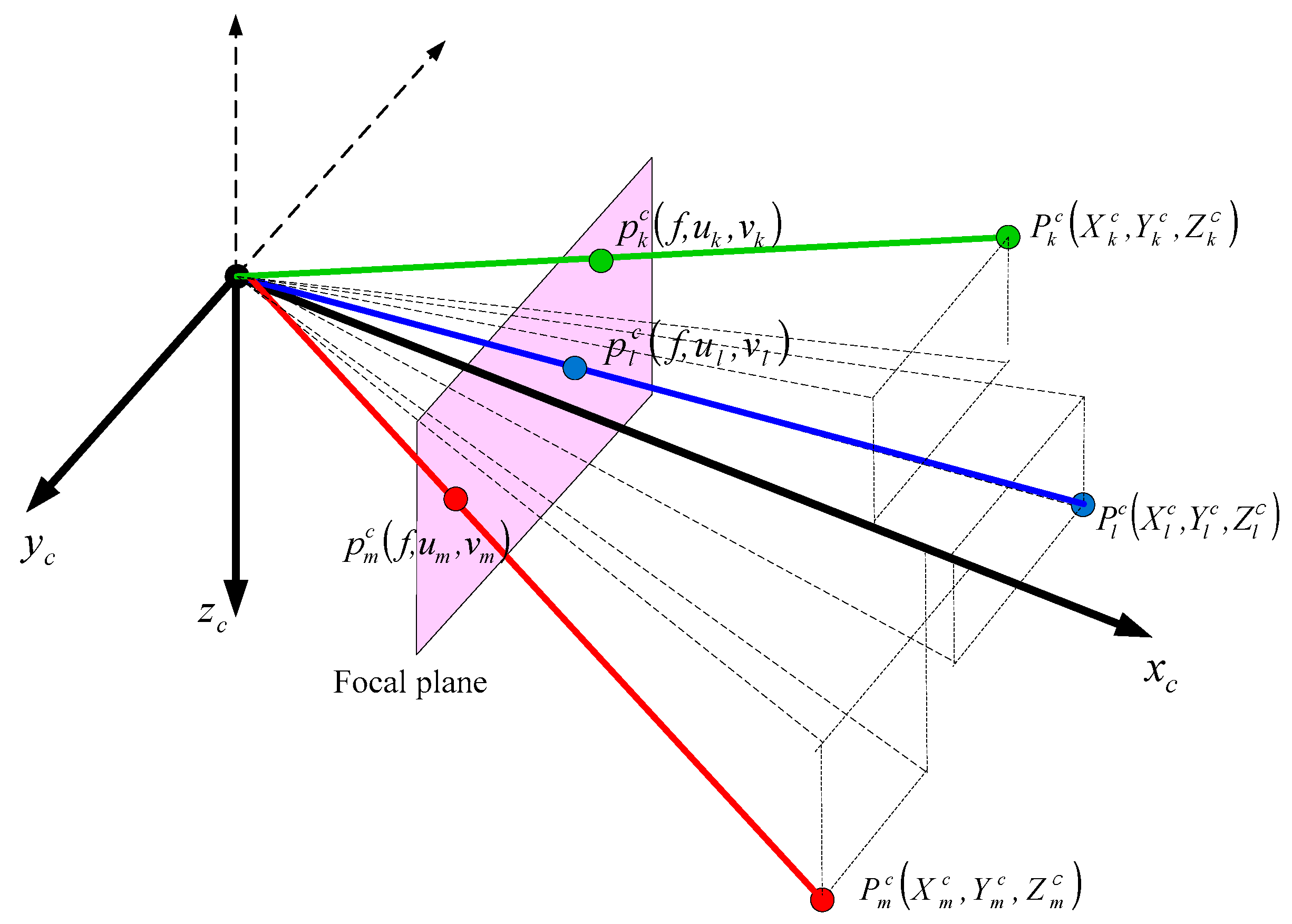
2. Landmark-Based Vision Navigation
3. Vision/INS Integrated Navigation System
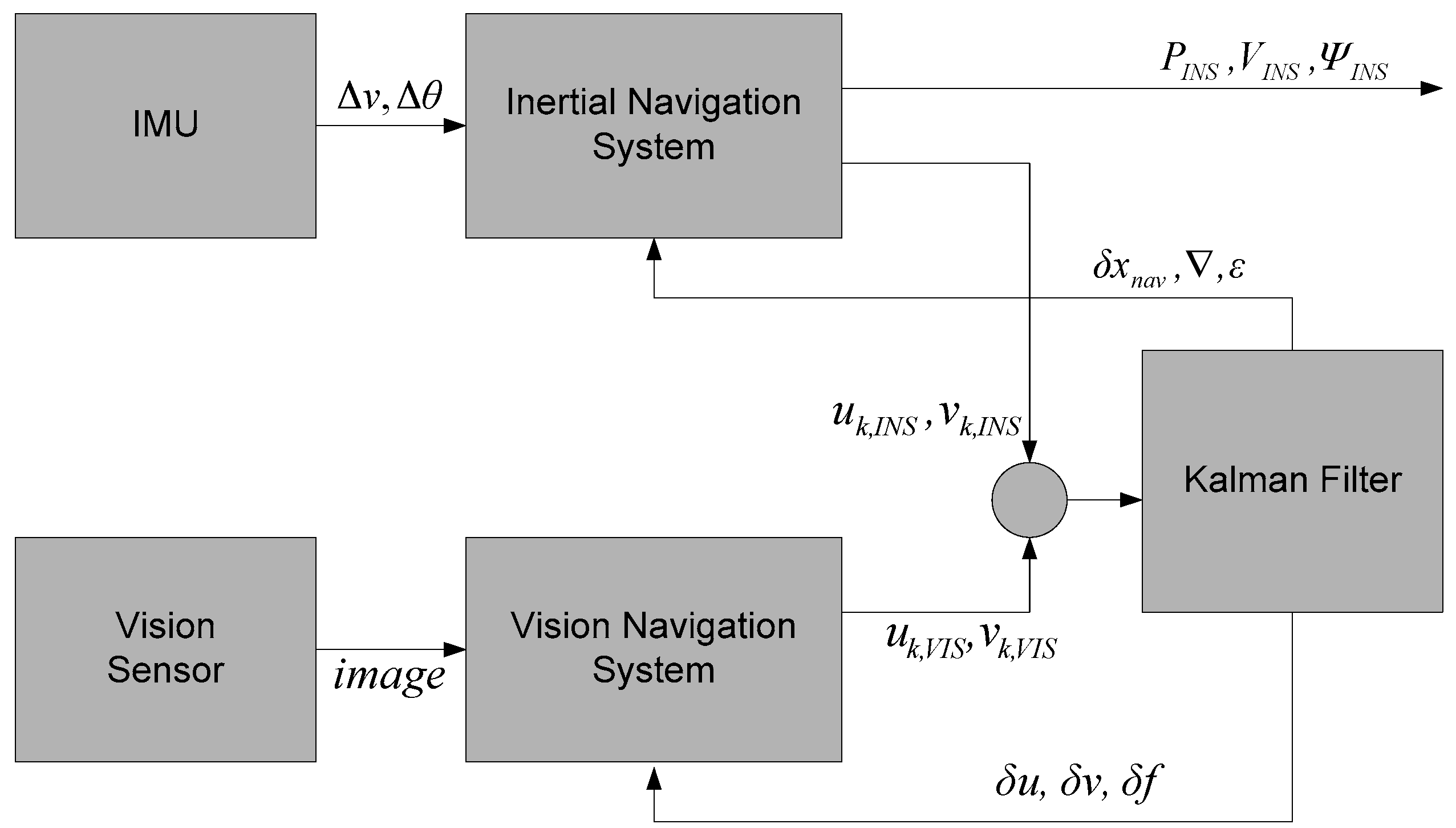
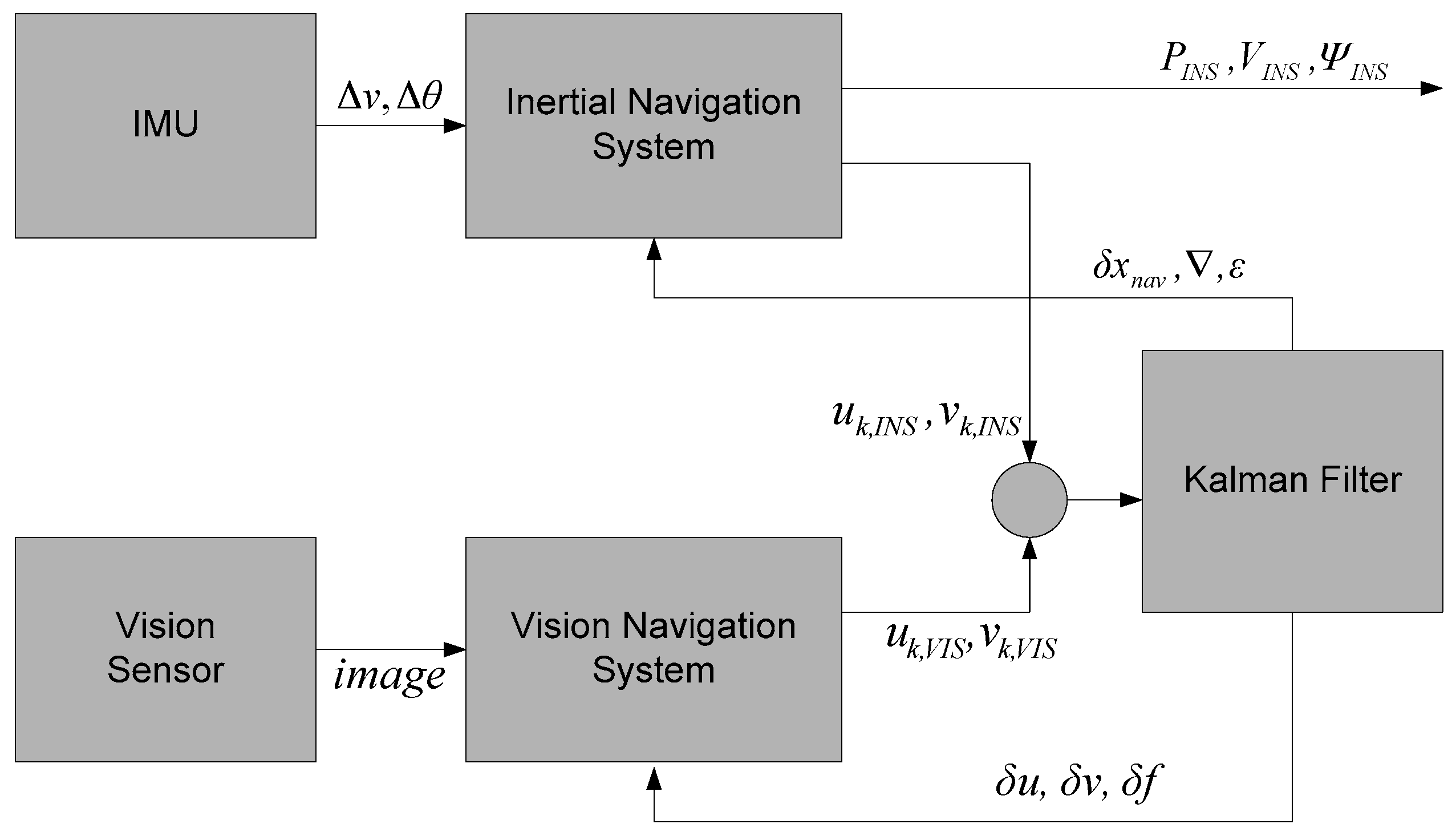
3.1. Vision/INS Integrated Navigation System
3.2. Process Model of the Kalman Filter
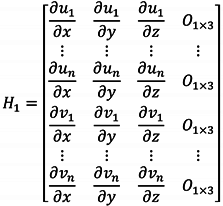
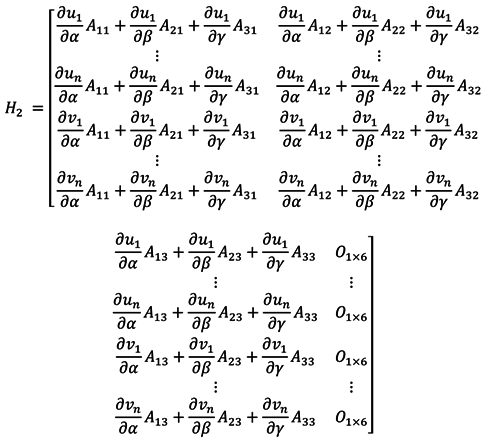
3.3. Measurement Model of the Kalman Filter

4. Computer Simulation and Experimental Result
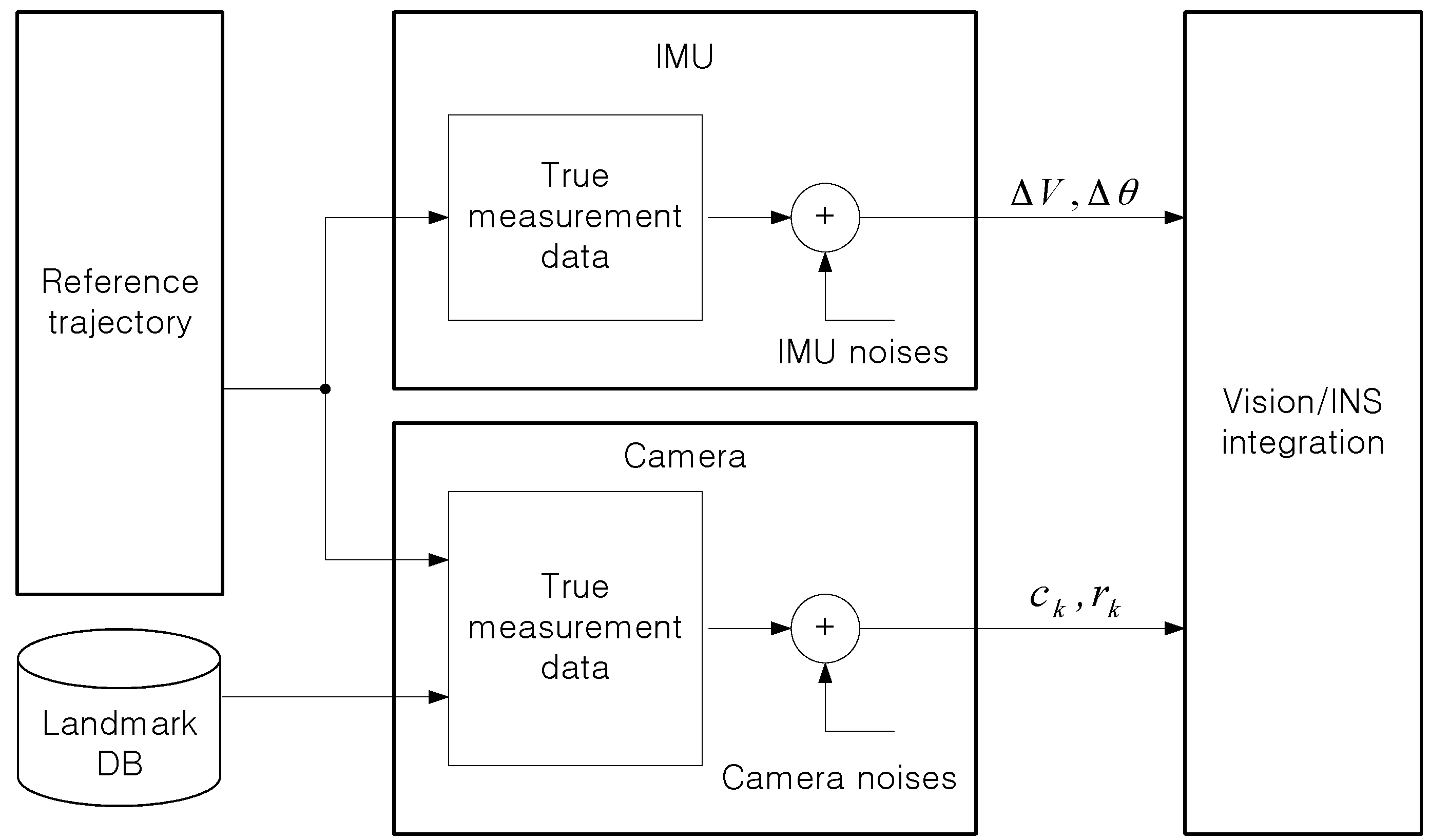
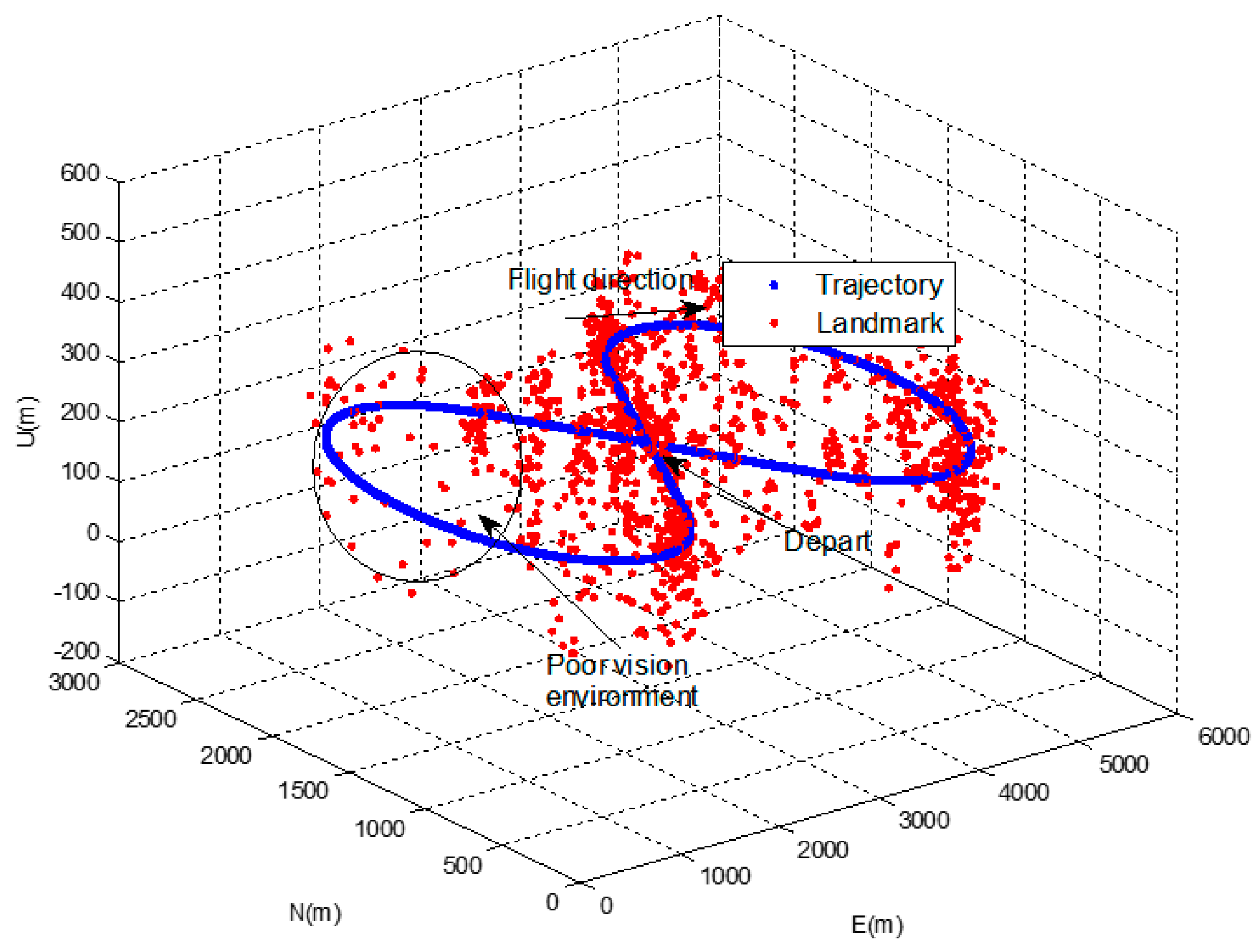
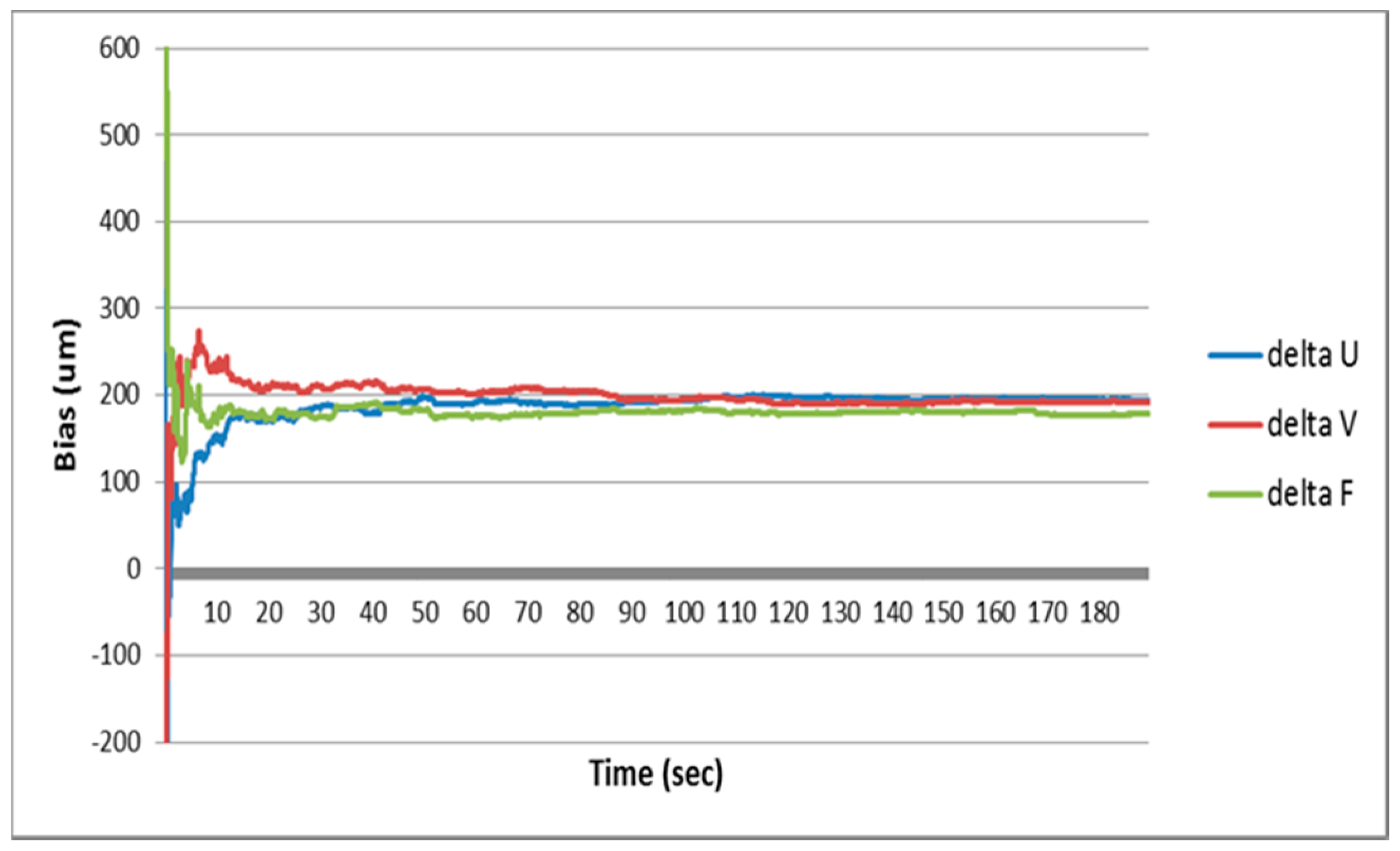
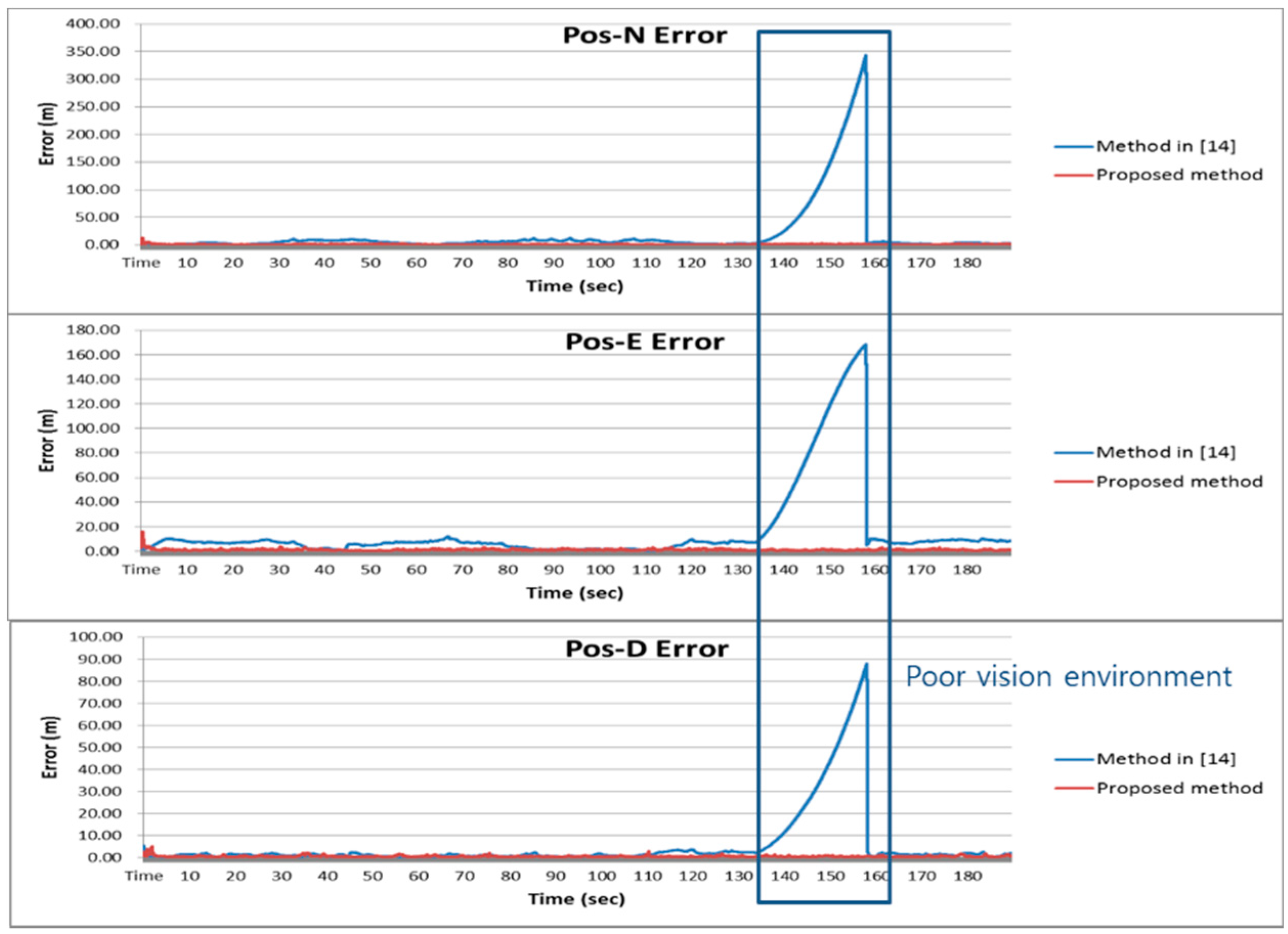
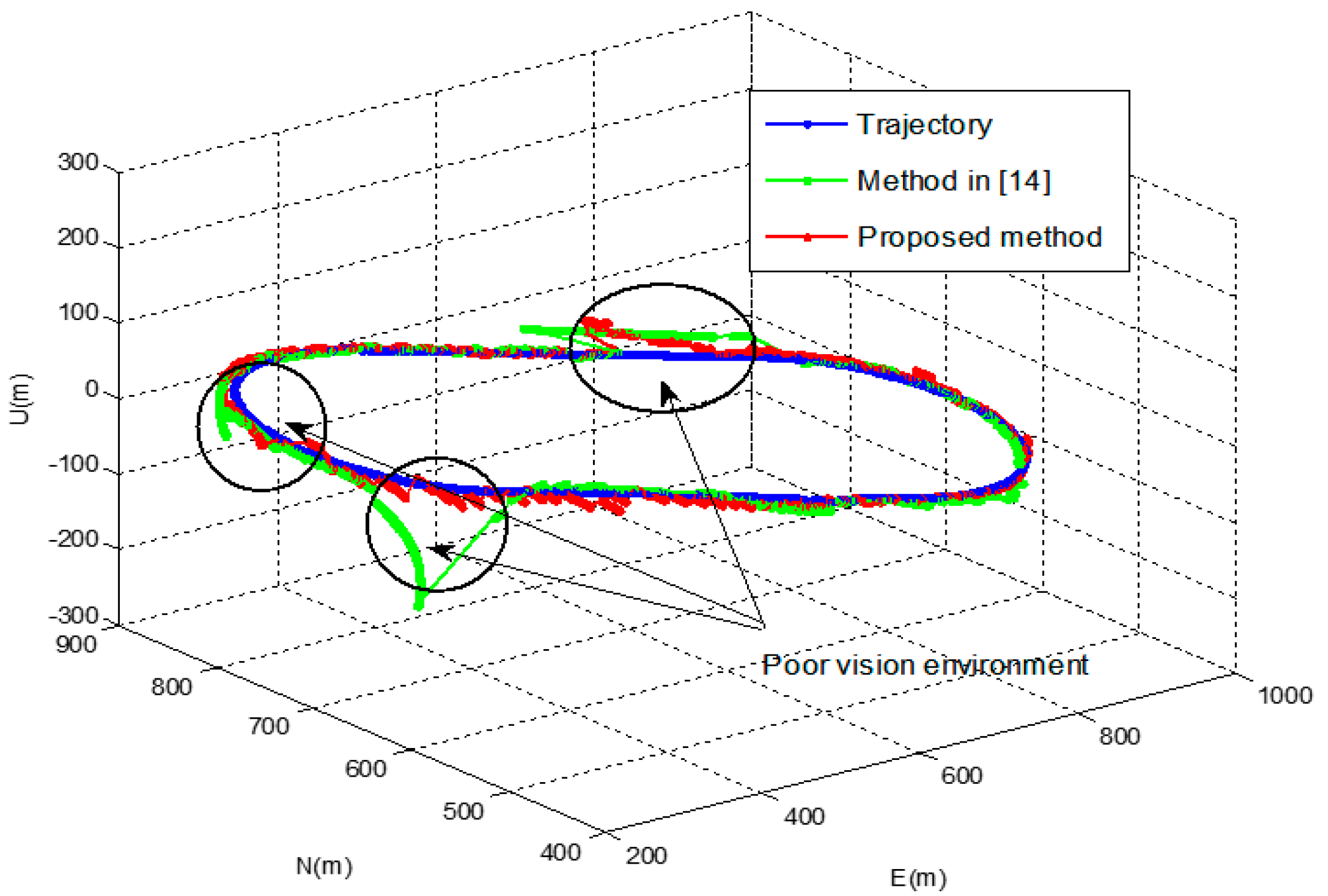
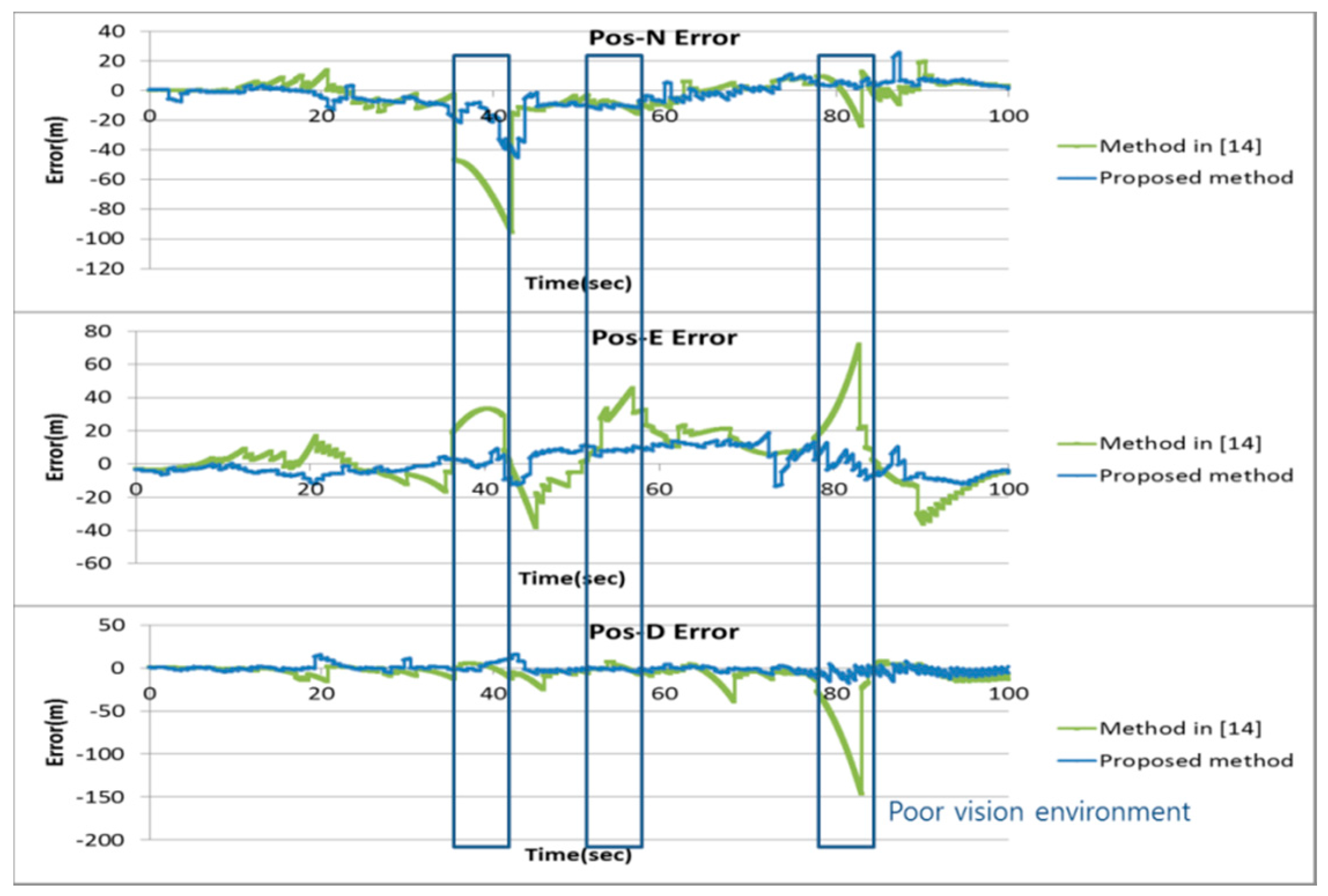
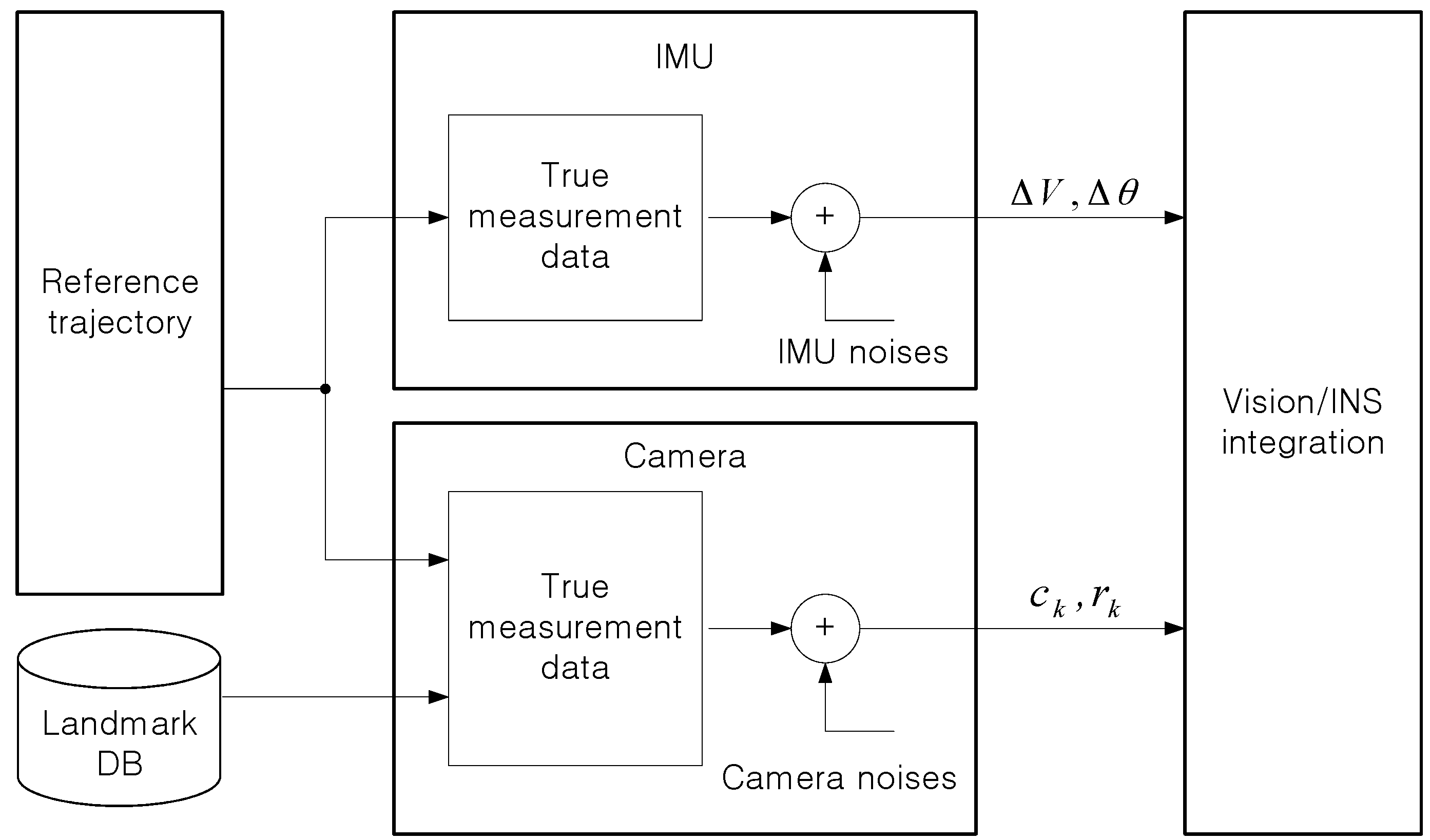
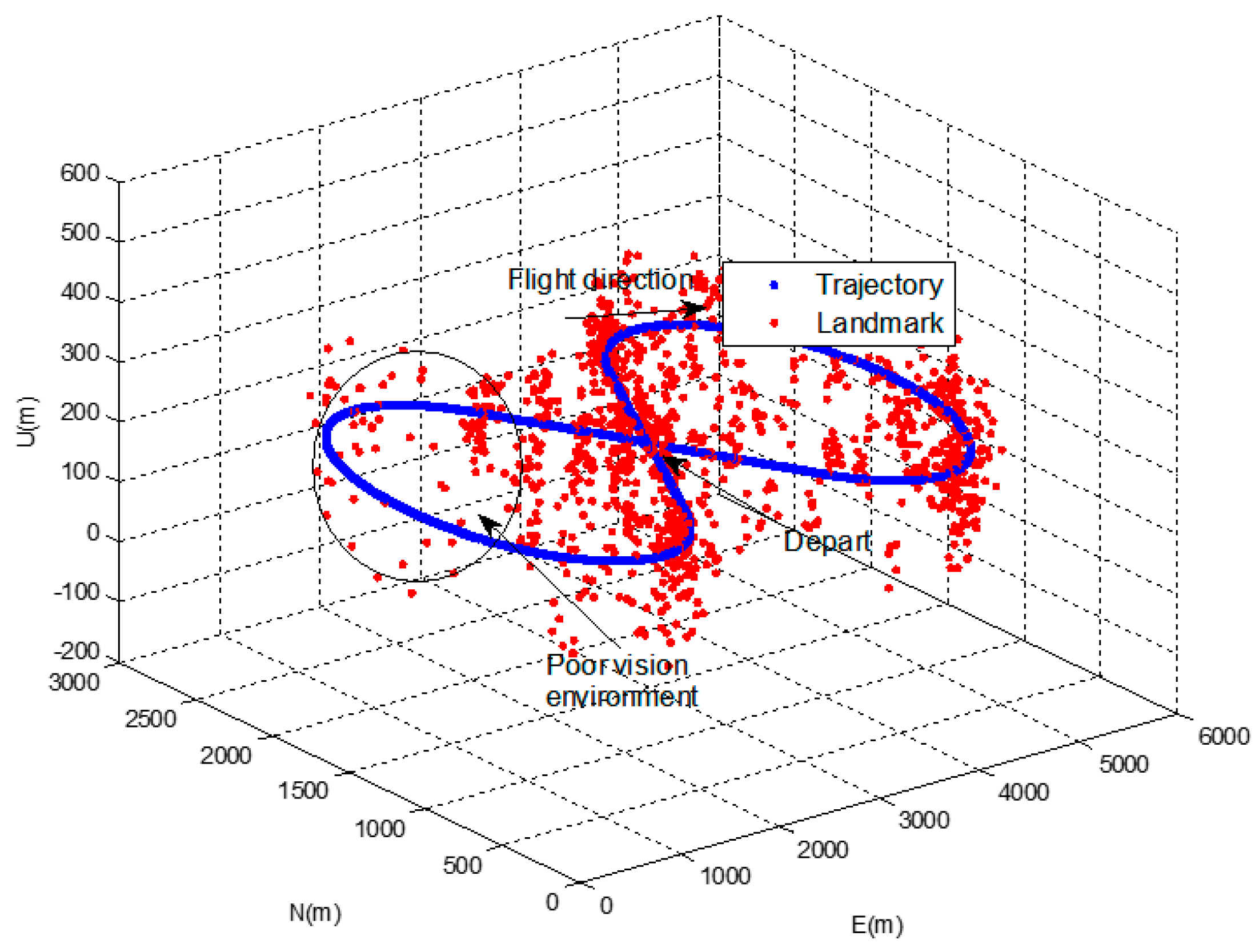
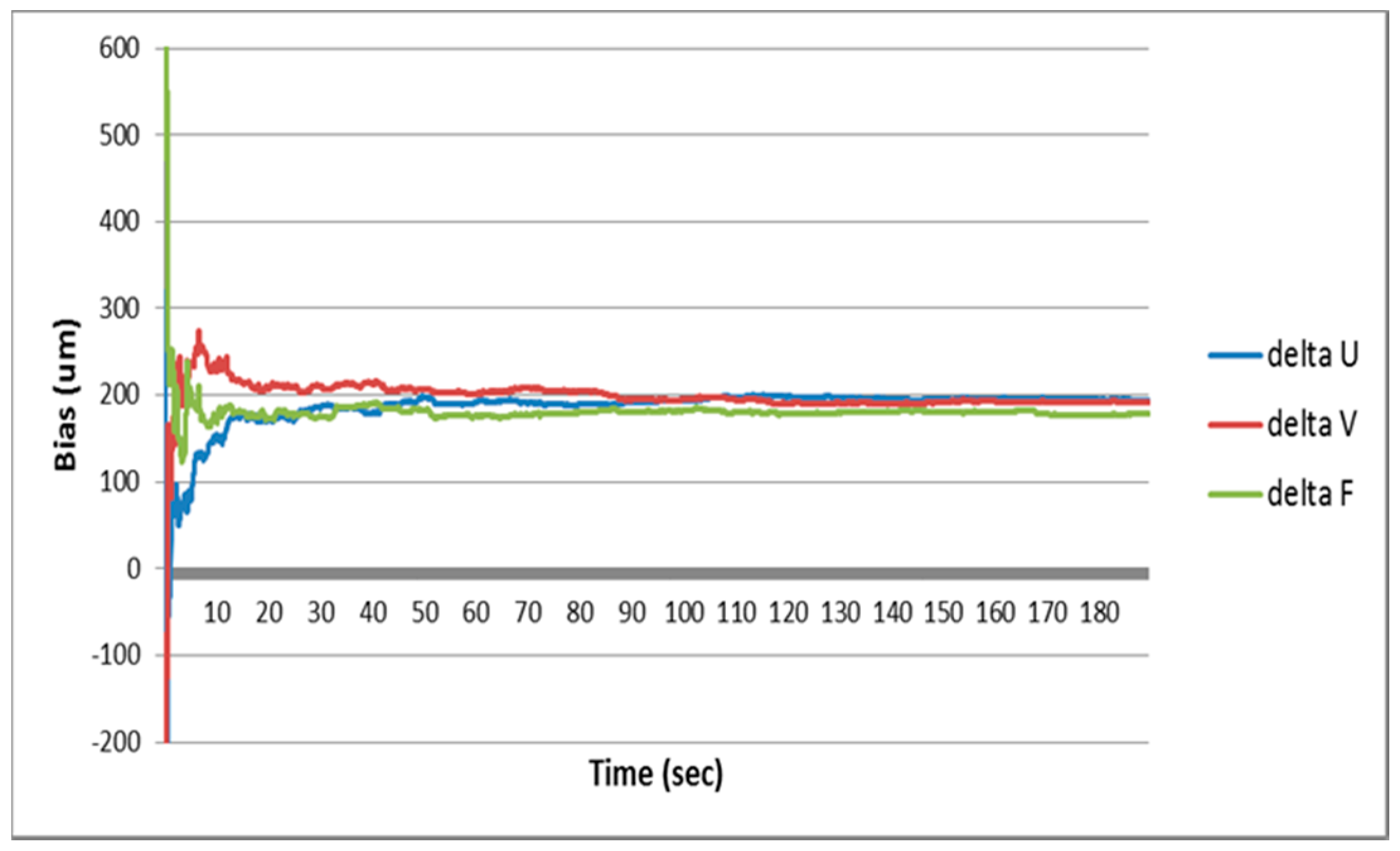
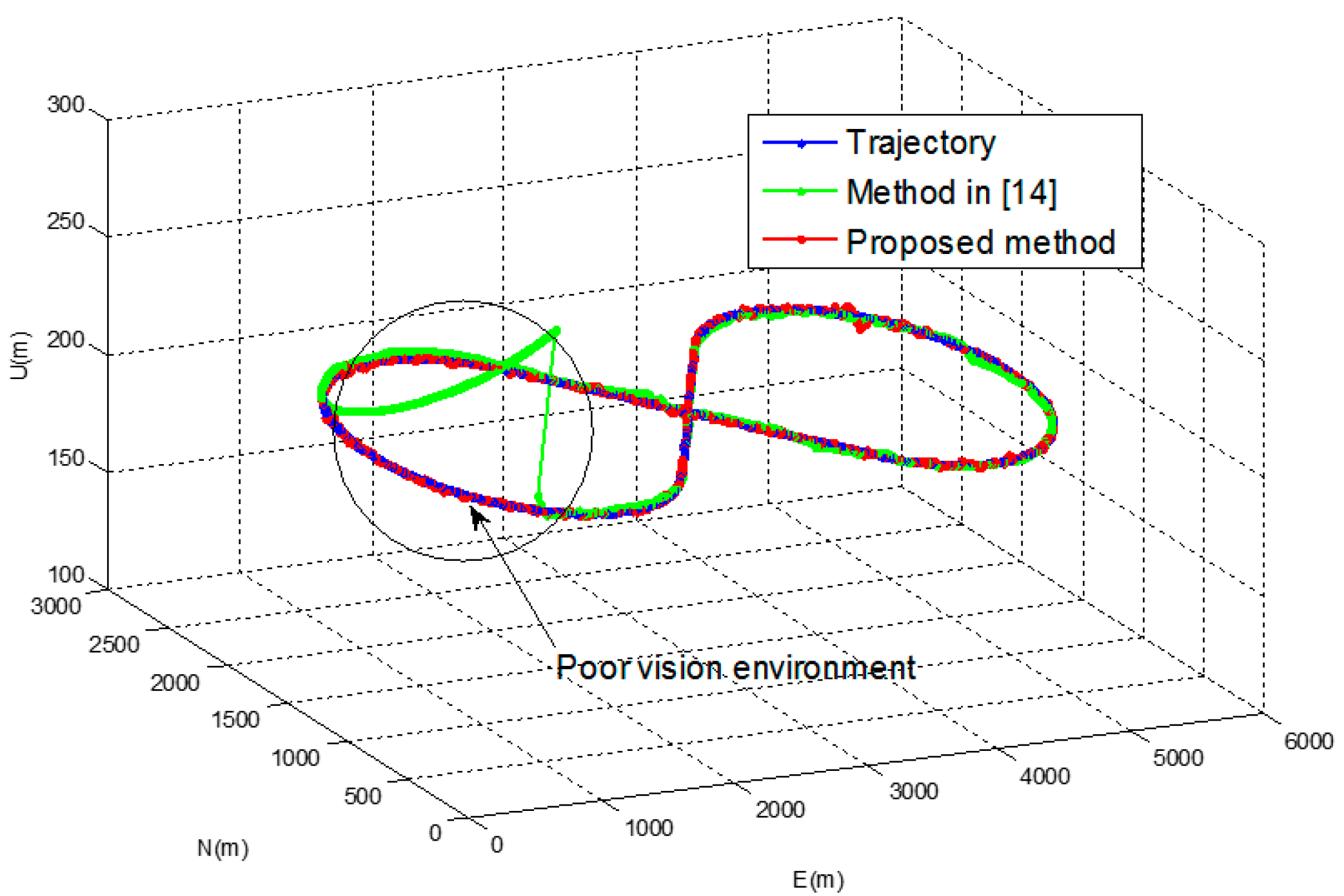
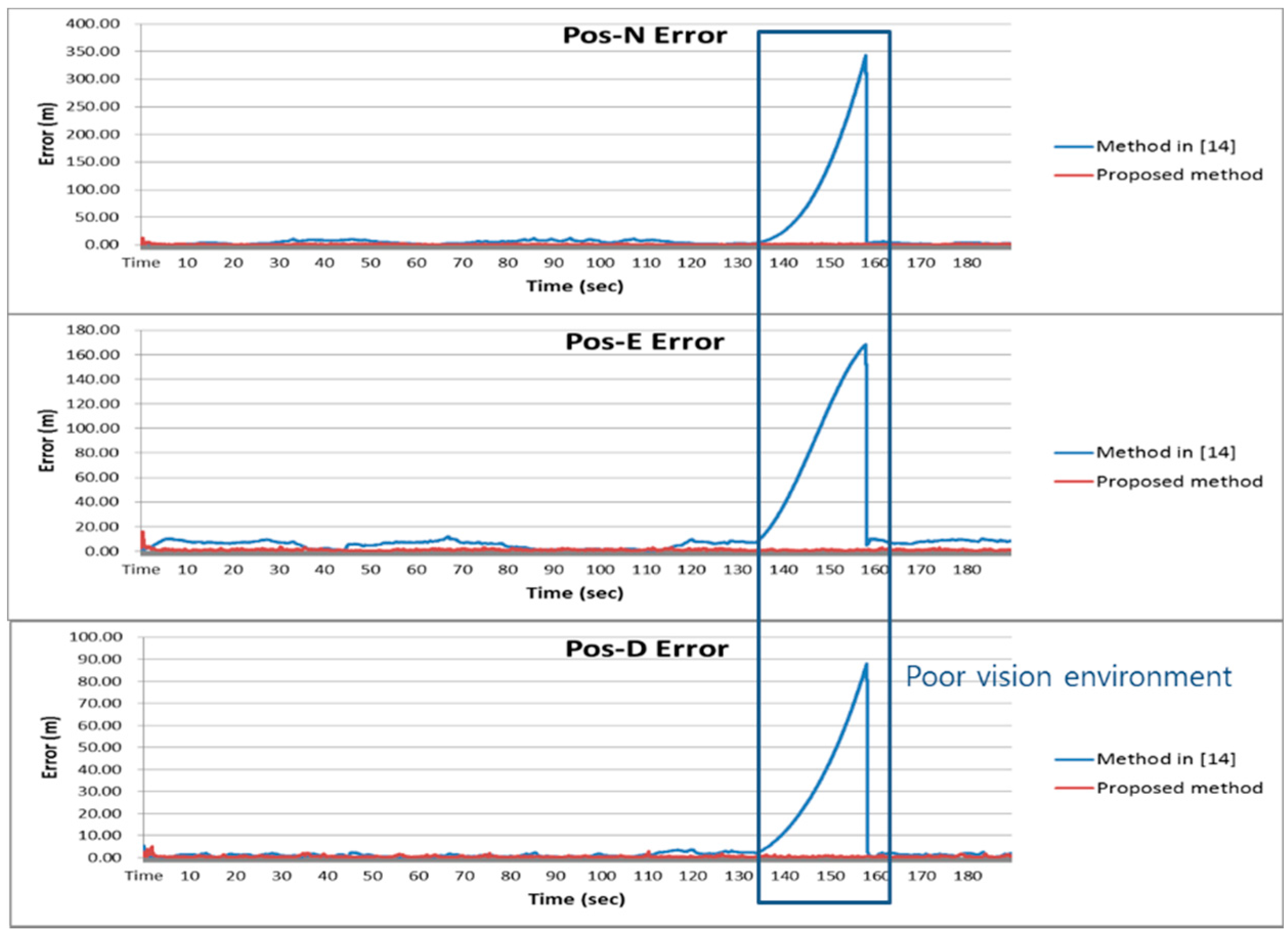
4.1. Computer Simulation
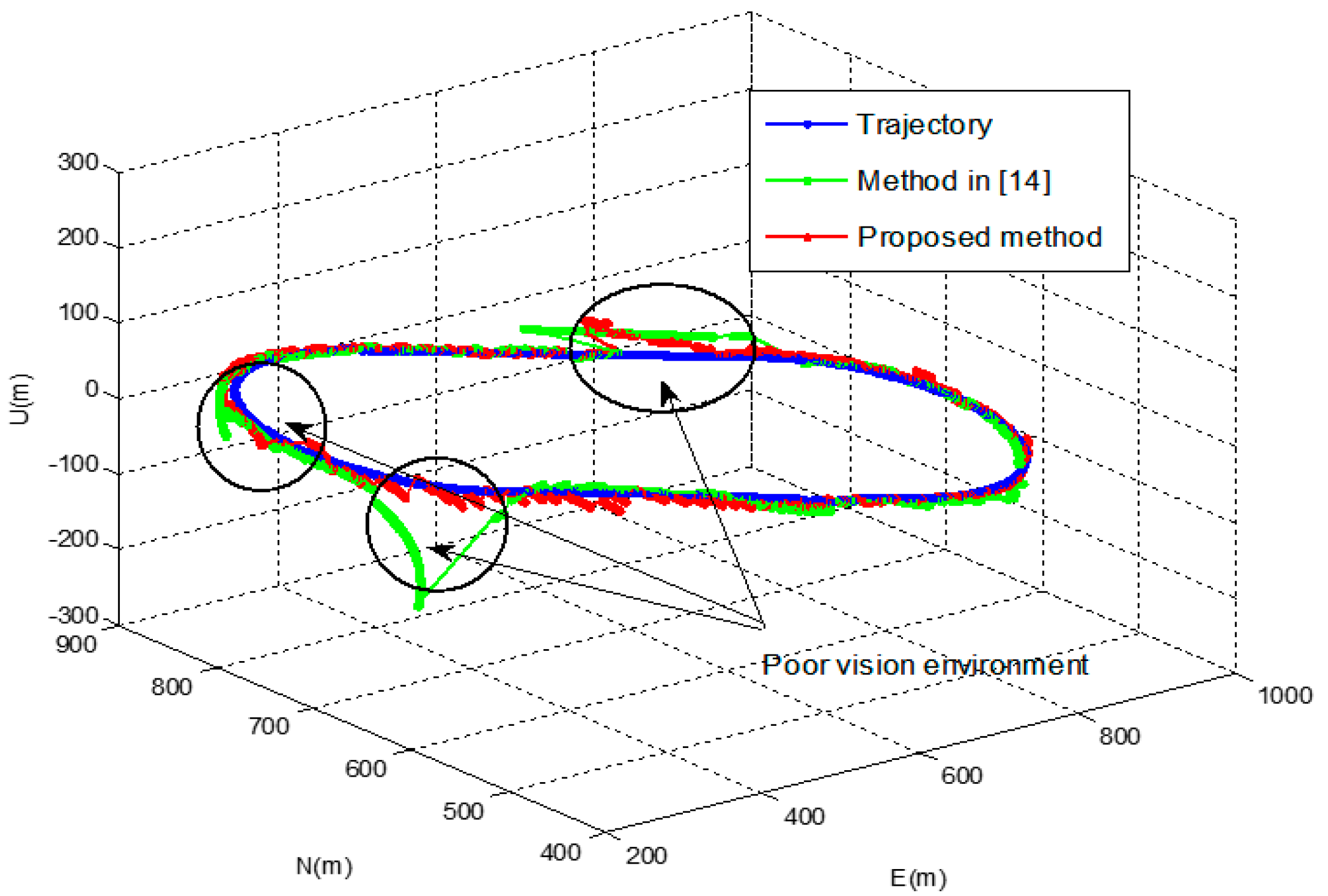
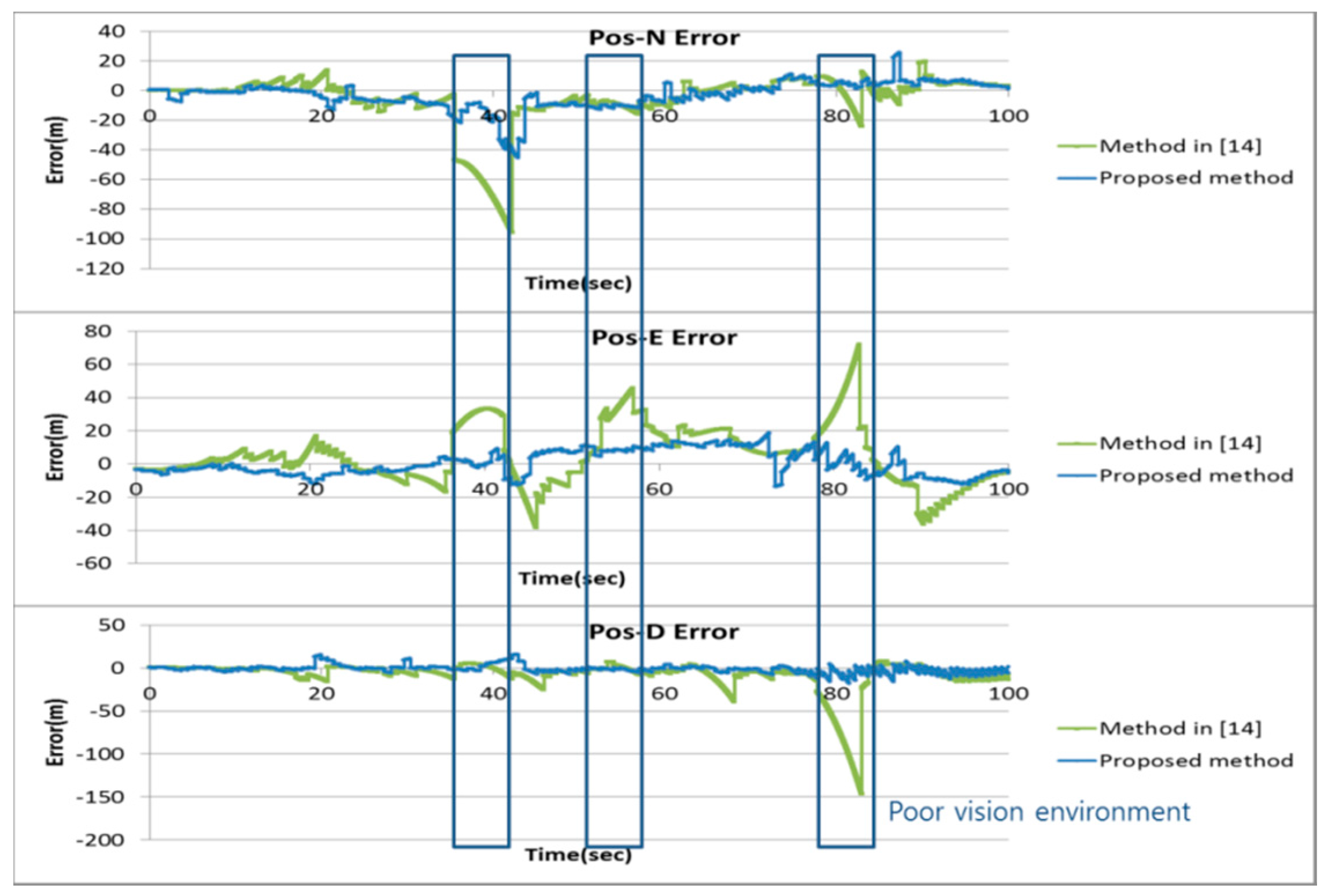
4.2. Van Test
5. Concluding Remarks and Further Studies
Author Contributions
Conflicts of Interest
References
- Biezad, D.J. Integrated Navigation and Guidance Systems, 1st ed.; American Institute of Aeronautics and Astronautics Inc.: Virginia, VA, USA, 1999; pp. 139–150. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 1st ed.; Artech House: Boston, MA, USA, 2008; pp. 361–469. [Google Scholar]
- Ehsan, S.; McDonald-Maier, K.D. On-Board Vision Processing for Small UAVs: Time to Rethink Strategy. 2015. arXiv:1504.07021. arXiv.org e-Print archive. Available online: https://arxiv.org/abs/1504.07021 (accessed on 10 October 2016).
- Groves, P.D. The PNT boom, future trends in integrated navigation. Inside GNSS 2013, 2013, 44–49. [Google Scholar]
- Bryson, M.; Sukkarieh, S. Building a robust implantation of bearing-only inertial SLAM for a UAV. J. Field Robot. 2007, 24, 113–143. [Google Scholar] [CrossRef]
- Veth, M.J. Navigation using images, a survey of techniques. J. Inst. Navig. 2011, 58, 127–139. [Google Scholar] [CrossRef]
- Borenstein, J.; Everette, H.R.; Feng, L. Where am I? Sensors and Methods for Mobile Robot Positioning, 1st ed.; University of Michigan: Michigan, MI, USA, 1996. [Google Scholar]
- Thompson, W.B.; Henderson, T.C.; Colvin, T.L.; Dick, L.B.; Valiquette, C.M. Vision-based localization. In Proceedings of the 1993 Image Understanding Workshop, Maryland, MD, USA, 18–21 April 1993; pp. 491–498.
- Betke, M.; Gurvits, L. Mobile robot localization using landmarks. IEEE Trans. Robot. Autom. 1997, 13, 251–263. [Google Scholar] [CrossRef]
- Chatterji, G.B.; Menon, P.K.; Sridhar, B. GPS/machine vision navigation systems for aircraft. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 1012–1025. [Google Scholar] [CrossRef]
- Scaramuzza, D. Visual odometry-tutorial. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- George, M.; Sukkarieh, S. Camera aided inertial navigation in poor GPS environments. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–12.
- Tardif, J.P.; George, M.; Laverne, M. A new approach to vision-aided inertial navigation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4161–4168.
- Kim, Y.S.; Hwang, D.-H. INS/vision navigation system considering error characteristics of landmark-based vision navigation. J. Inst. Control Robot. Syst. 2013, 19, 95–101. [Google Scholar] [CrossRef]
- Yue, D.X.; Huang, X.S.; Tan, H.L. INS/VNS fusion based on unscented particle filter. In Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition, Beijing, China, 2–4 November 2007; pp. 151–156.
- Wang, W.; Wang, D. Land vehicle navigation using odometry/INS/vision integrated system. In Proceedings of the 2008 IEEE International Conference on Cybernetics Intelligent Systems, Chengdu, China, 21–24 September 2008; pp. 754–759.
- Meskin, D.G.; Itzhack, Y.B. A unified approach to inertial navigation system error modeling. J. Guid. Control Dyn. 1992, 15, 648–653. [Google Scholar] [CrossRef]
- Song, G.W.; Jeon, C.B.; Yu, J. Relation of euler angle error and eotation vector error. In Proceedings of the 1997 Conference on Control and Instrumentation, Automation, and Robotics, Seoul, Korea, 22–25 July 1997; pp. 217–222.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Description |
|---|---|
| Accelerometer bias | 5 mg |
| Accelerometer random walk | 0.1 |
| Gyro bias | 100°/h |
| Gyro random walk | 0.5° |
| Data rate | 100 Hz |
| Roll Error | 0.1° |
| Pitch Error | 0.1° |
| Yaw Error | 5.0° |
| Specification | Description | Specification | Description |
|---|---|---|---|
| Focal length | 25 mm | Avg. of focal lengh error | 200 um |
| No. of horizontal pixels | 4000 | Avg. of horizontal optical axis coordinate error | 200 um |
| No. of vertical pixels | 3000 | Avg. of vertical optical axis coordinate error | 200 um |
| Field of view | 90° | Focal lengh error () | 200 um |
| Horizontal pixel pitch | 8 um | Horizontal optical axis coordinate error () | 200 um |
| Vertical pixel pitch | 8 um | Vertical optical axis coordinate error () | 200 um |
| Data rate | 10 Hz |
| Error | Pure INS | Method in [14] | Propsosed Method | |
|---|---|---|---|---|
| Position error (m) | N | 1026.88 | 18.59 | 0.99 |
| E | 3350.72 | 15.90 | 1.12 | |
| D | 1370.55 | 5.34 | 0.45 | |
| Velocity error (m/s) | N | 22.04 | 3.46 | 2.73 |
| E | 22.09 | 2.88 | 3.07 | |
| D | 15.15 | 0.97 | 1.14 | |
| Attitude error (°) | Roll | 0.69 | 2.02 | 0.06 |
| Pitch | 0.65 | 2.44 | 0.37 | |
| Yaw | 8.42 | 3.14 | 0.63 | |
| Specification | Description |
|---|---|
| Manufacturer | Crossbow Ltd. |
| Accelerometer bias | 10 mg |
| Accelerometer random walk | 0.1 m/s/ |
| Accelerometer scaling factor error | 10,000 ppm |
| Gyro bias | 3600°/h |
| Gyro random walk | 1.0°/ |
| Gyro scaling factor error | 1000 ppm |
| Data rate | 135 Hz |
| Roll error | 0.61° |
| Pitch error | 0.01° |
| Yaw error | 4.30° |
| Specification | Description | |
|---|---|---|
| Manufacturer | Axis Ltd. | |
| Image sensor | Sensor type | CMOS-color |
| No. of horizontal pixel | 1280 | |
| No. of vertical pixel | 800 | |
| Horizontal pixel pitch | 3 um | |
| Vertical pixel pitch | 3 um | |
| Lens | Focal length | 1.7 mm |
| Field of view | 99° | |
| Data rate (frame rate) | Max 30 Hz (1.4 Hz is used in experiment) | |
| Error | Pure INS | Method in [14] | Propsosed Method | |
|---|---|---|---|---|
| Position error (m) | N | 7110.95 | 9.29 | 6.50 |
| E | 1228.32 | 16.44 | 6.47 | |
| D | 6973.98 | 15.34 | 3.25 | |
| Velocity error (m/s) | N | 52.02 | 2.58 | 1.65 |
| E | 166.06 | 4.13 | 1.87 | |
| D | 200.25 | 7.83 | 4.67 | |
| Attitude error (°) | Roll | 32.54 | 4.04 | 2.31 |
| Pitch | 20.82 | 3.53 | 2.91 | |
| Yaw | 53.05 | 5.61 | 4.68 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Hwang, D.-H. Vision/INS Integrated Navigation System for Poor Vision Navigation Environments. Sensors 2016, 16, 1672. https://doi.org/10.3390/s16101672
Kim Y, Hwang D-H. Vision/INS Integrated Navigation System for Poor Vision Navigation Environments. Sensors. 2016; 16(10):1672. https://doi.org/10.3390/s16101672
Chicago/Turabian StyleKim, Youngsun, and Dong-Hwan Hwang. 2016. "Vision/INS Integrated Navigation System for Poor Vision Navigation Environments" Sensors 16, no. 10: 1672. https://doi.org/10.3390/s16101672
APA StyleKim, Y., & Hwang, D.-H. (2016). Vision/INS Integrated Navigation System for Poor Vision Navigation Environments. Sensors, 16(10), 1672. https://doi.org/10.3390/s16101672