
Mobile Crowd Sensing for Traffic Prediction in Internet of Vehicles

 ,
, 

Abstract
:1. Introduction
- We discuss state-of-art traffic data collection and traffic prediction technologies in detail.
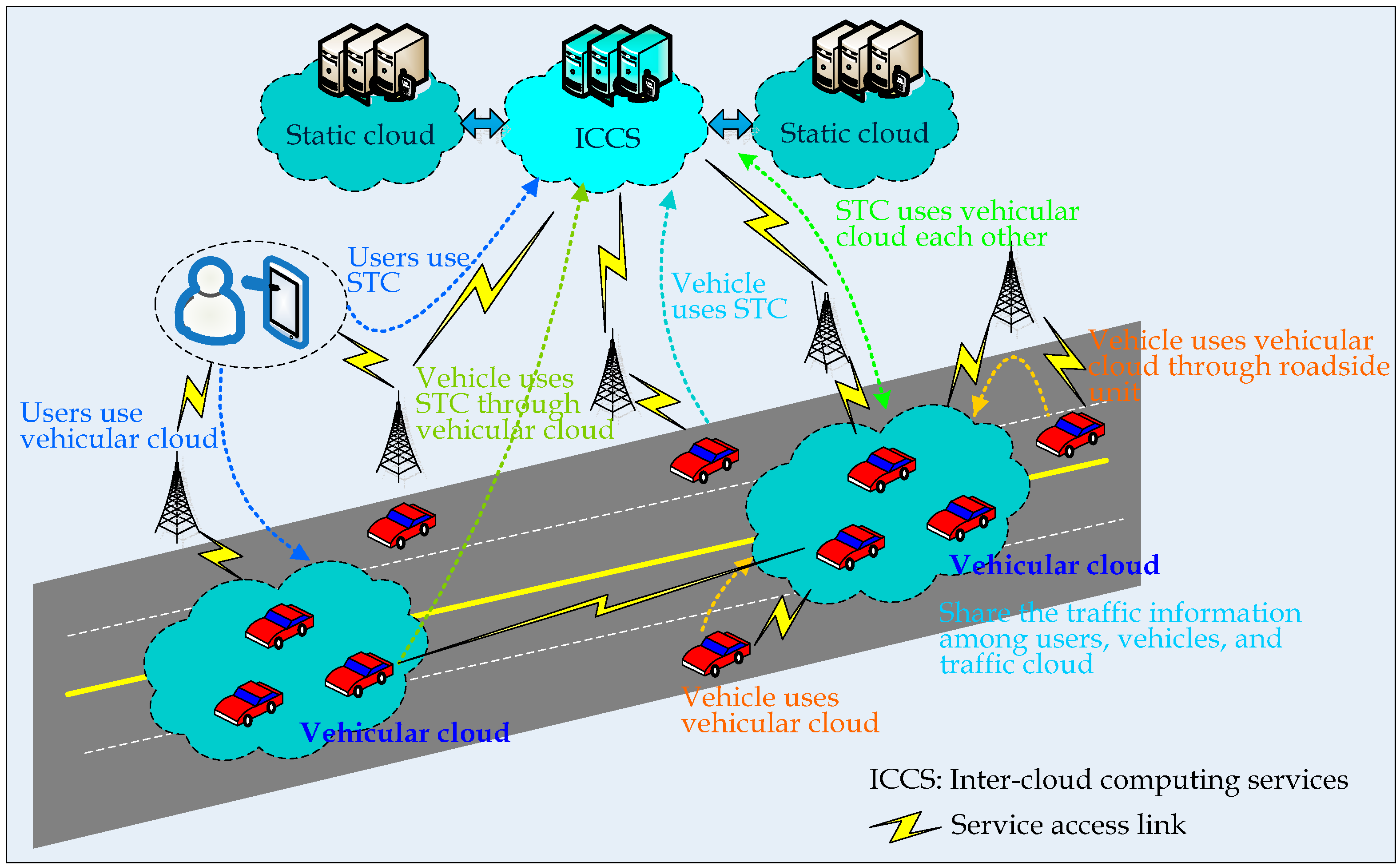
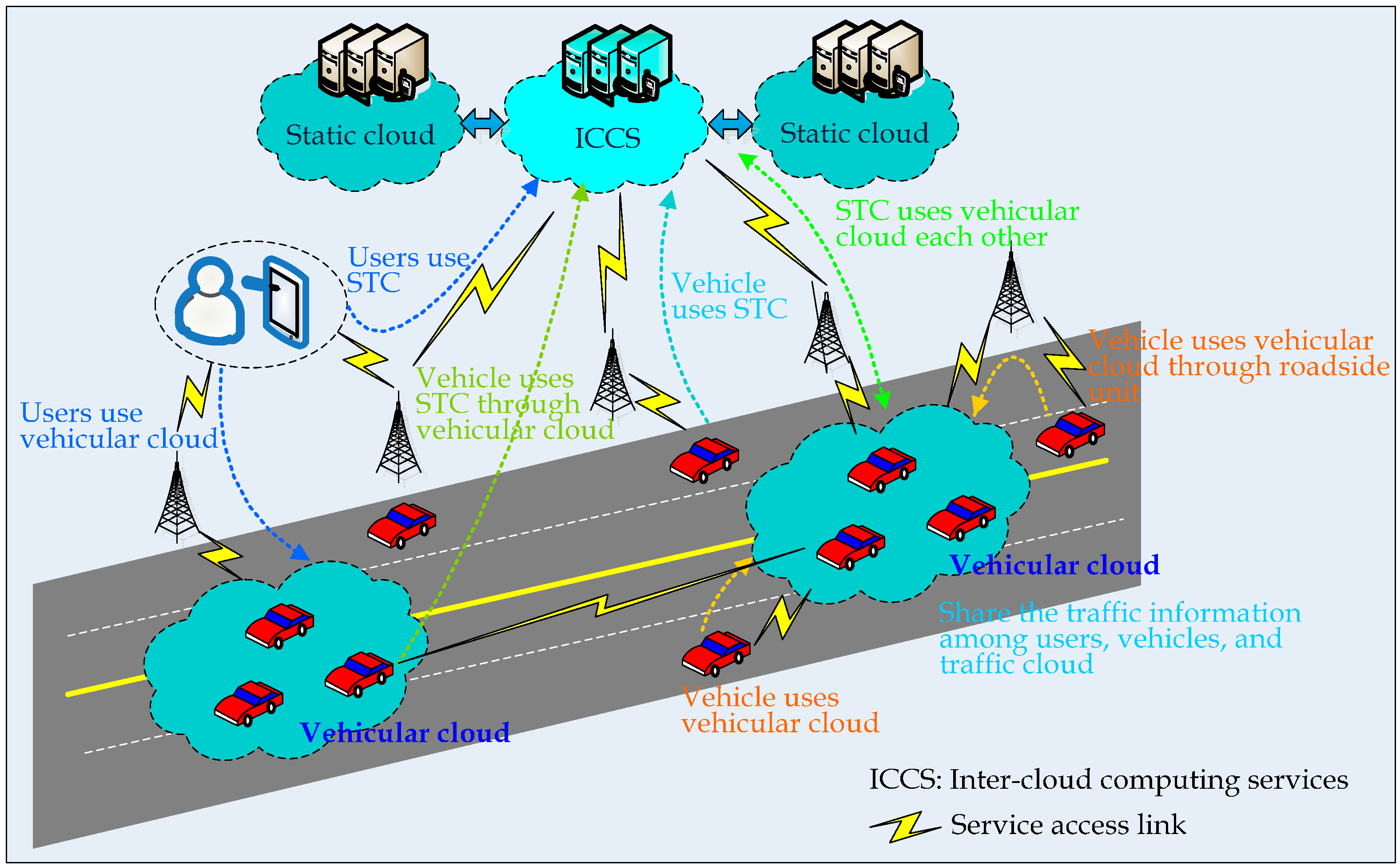
- We analyze the architecture of CAIV in a traffic analysis cloud environment and emphasize how to utilize the cloud to realize traffic prediction.
- We propose a novel algorithm based on MCS technology to predict traffic conditions.
- Also, we provide a qualitative comparison among three kinds of approaches, and we discuss our analysis and the field’s outlook.
2. Related Works
2.1. Traffic Data Collection Technologies
2.2. Traffic Prediction Technologies
2.2.1. Travel Time Aggregation for Traffic Prediction
2.2.2. Spatio-Temporal Correlations for Traffic Prediction
2.2.3. MCS Paradigms in Transportation
- MIT’s CarTel project [15]. Both mobile devices and custom-built on-board telematics devices were used to gather information about vehicles’ location and speed. The CarTel system can estimate road travel times using a combination of historic and real-time information. These estimates are used in detection of congested road segments and in real-time route planning to minimize expected travel times. In this case, the energy consumption of the mobile devices is reduced by using inaccurate but less power-demanding positioning.
- Microsoft Corp.’s Nericell project [16]. This project focused on traffic in developing regions, with experiments conducted in Bangalore. In particular, emphasis was placed on the detection of potholes in roads, based on particular patterns of acceleration observations, and traffic congestion, where microphones were used to detect honking. The project introduced the notion of triggered sensing, in which an observation from a less energy-consuming sensor (e.g., an interesting GSM location) is used to activate a more power-hungry but accurate sensor (e.g., the GPS).
- The University of California, Berkeley and Nokia Corp.’s Mobile Century and Mobile Millennium projects [17]. The velocity of traffic in San Francisco was monitored using GPS-enabled mobile phones. Privacy was enforced through the use of spatial sampling that produced anonymized observations when crossing so-called virtual trip lines.
- ParkNet [18]: An application that detects available parking spots in cities using smart phones combined with ultrasonic sensing devices installed on vehicles.
- Queen’s University (Canada)’s CrowdITS project [19]. An ongoing effort to develop a crowd-based sensing system that uses both GPS logging and voice commands to gather information about congestion, and use the information for the real-time computation of congestion-free routes.
3. Cloud-Assisted Internet of Vehicles
4. MCS for Traffic Prediction by VWC
- Automatic Sensing and Uploading Approaches: According to the Mobile Century and Mobile Millennium projects, the results suggest that a 2%–3% penetration of smartphones in the driver population is enough to provide accurate measurements of traffic conditions. Therefore, at the early stage of the project implementation, we can make use of administrative means to obtain the participation of, for example, taxi drivers for the purposes of the experiments. Smartphones carried by taxi drivers can periodically forward data (e.g., mobileId, location, speed, and direction) to the traffic cloud through the mobile network. The duration of the period should be a tradeoff between energy consumption, data traffic and data reliability.
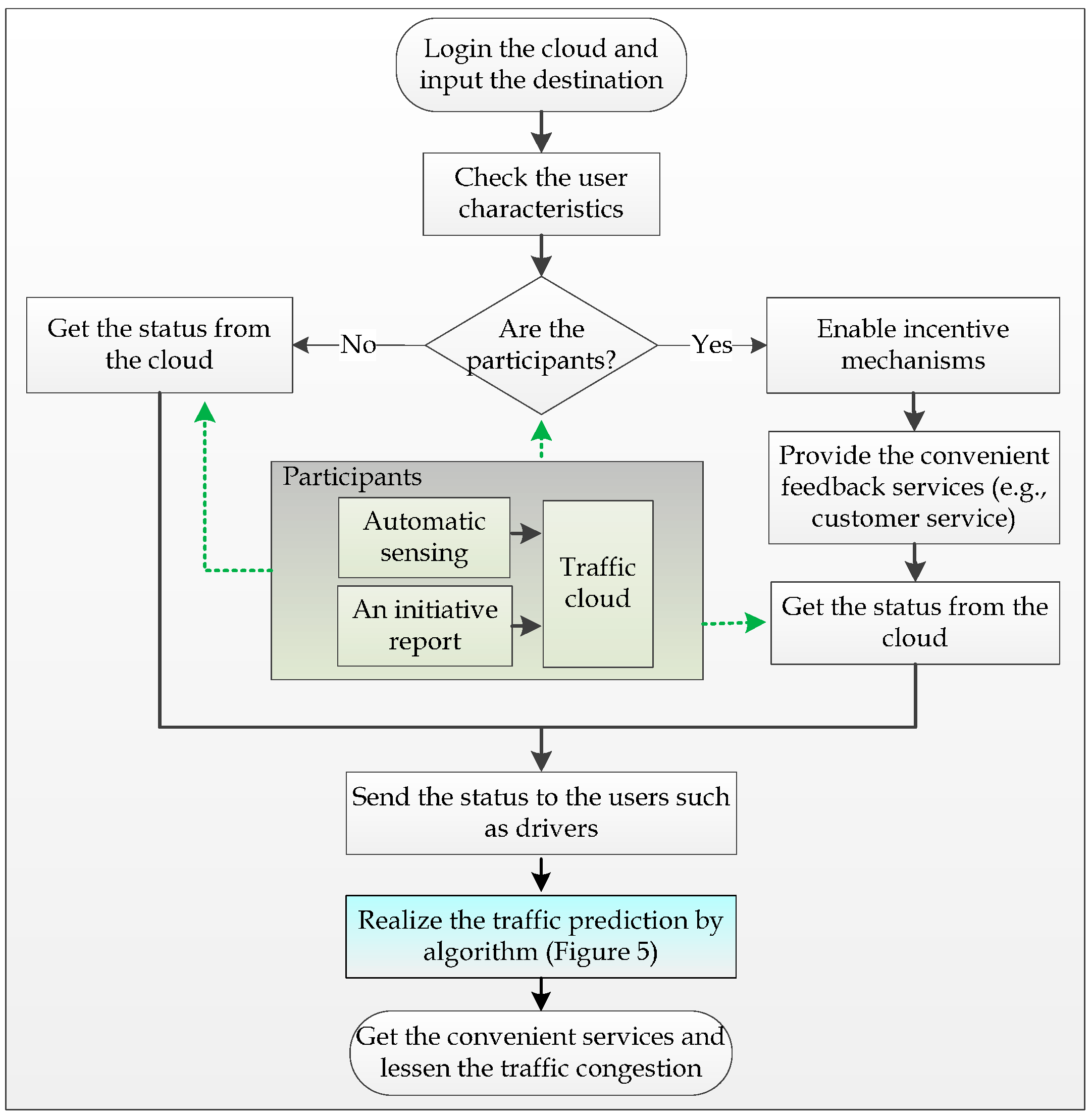
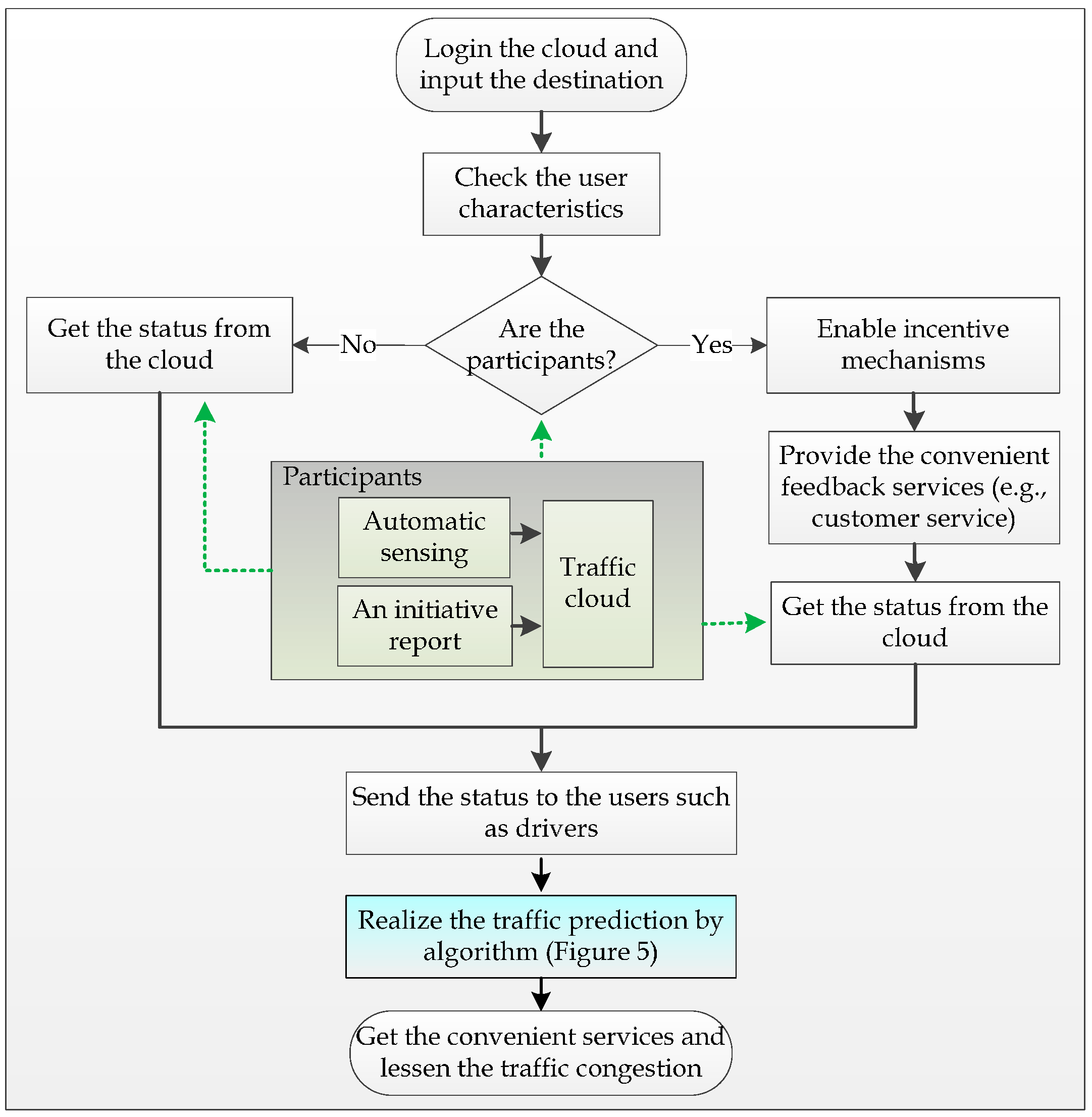
- Service Process: Figure 2 shows the logic flowchart of a cloud-assisted MCS traffic congestion control algorithm.
| Algorithm 1. |
| input: |
| T: The sample period; |
| sd : The destination station |
| begin |
| Set the weight parameters |
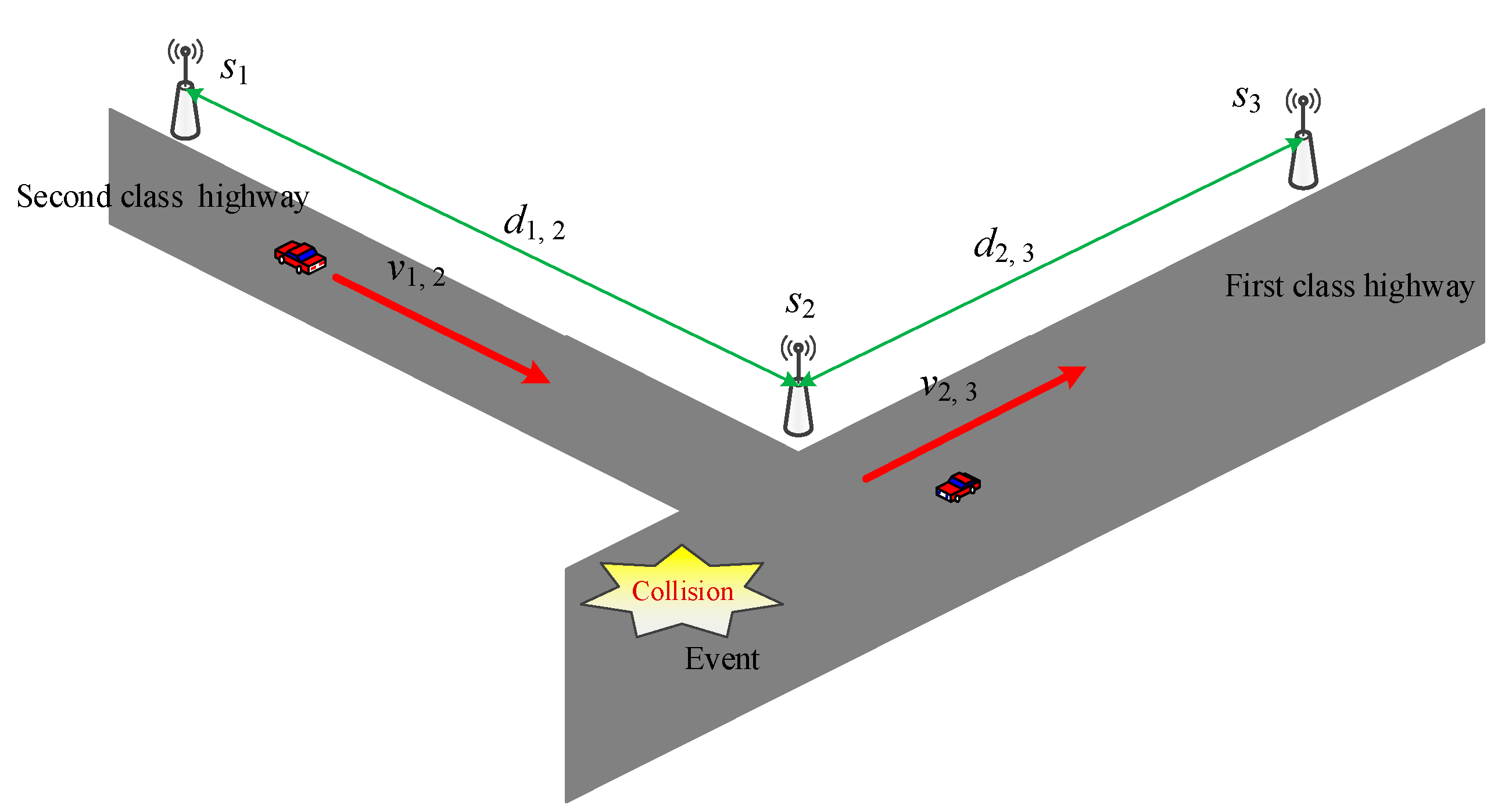
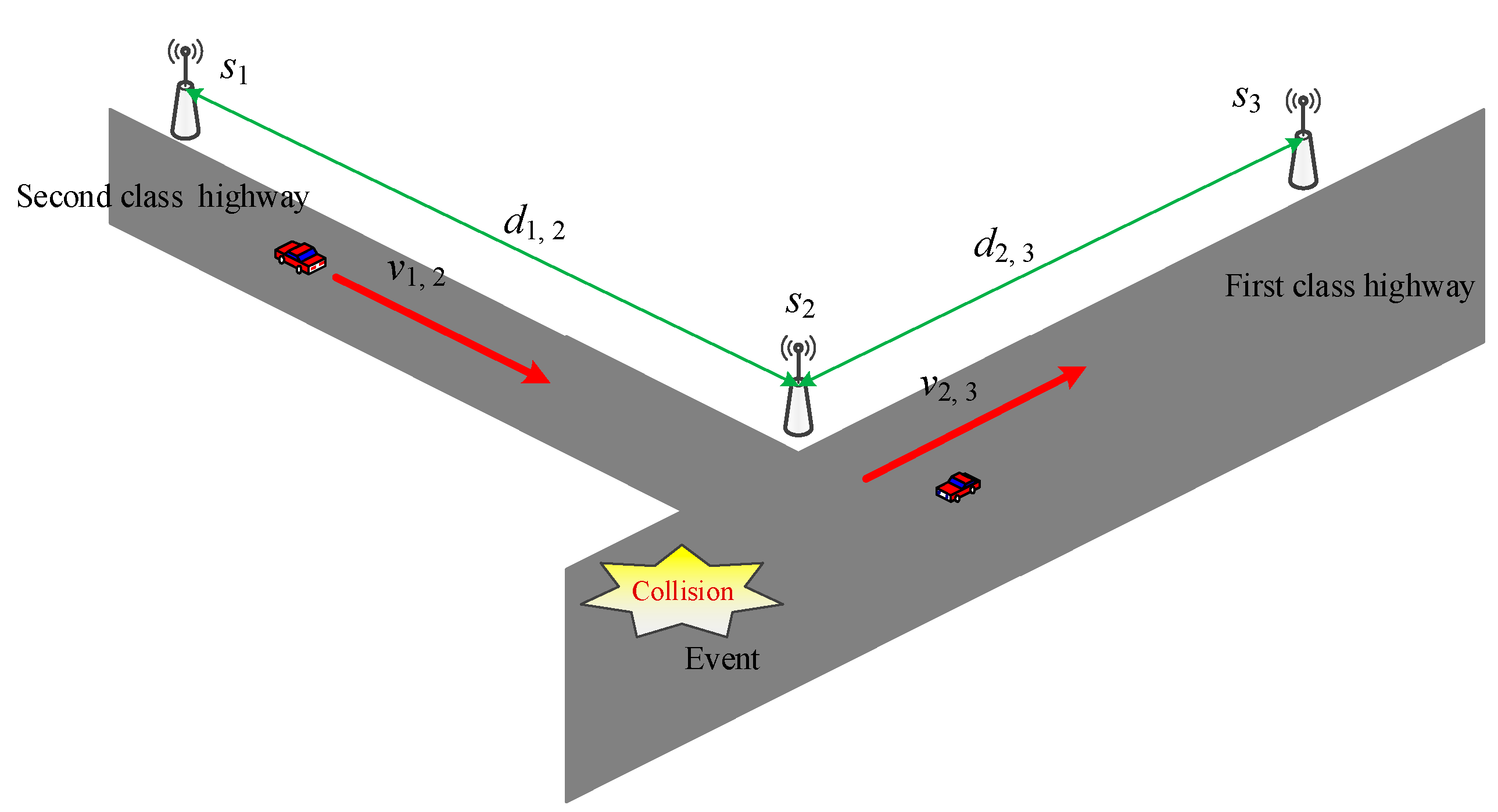
| Construct all values of di,j and qi,j according to the distances among stations; |
| Tccurrent time; TlTc; |
| while conditions are satisfied do |
| if (Tc- TlT) then |
| Construct all values of vi,j and ri,j which are obtained from cloud servers; |
| Construct the weight W using Equations (3) and (4); |
| Get the next station snext; |
| Obtain and report the shortest path from snext to sd using Dijkstra’s algorithm; |
| Tccurrent time; TlTc |
| else |
| Tccurrent time; |
| endif |
| endwhile |
| end. |
5. Simulation and Experiment
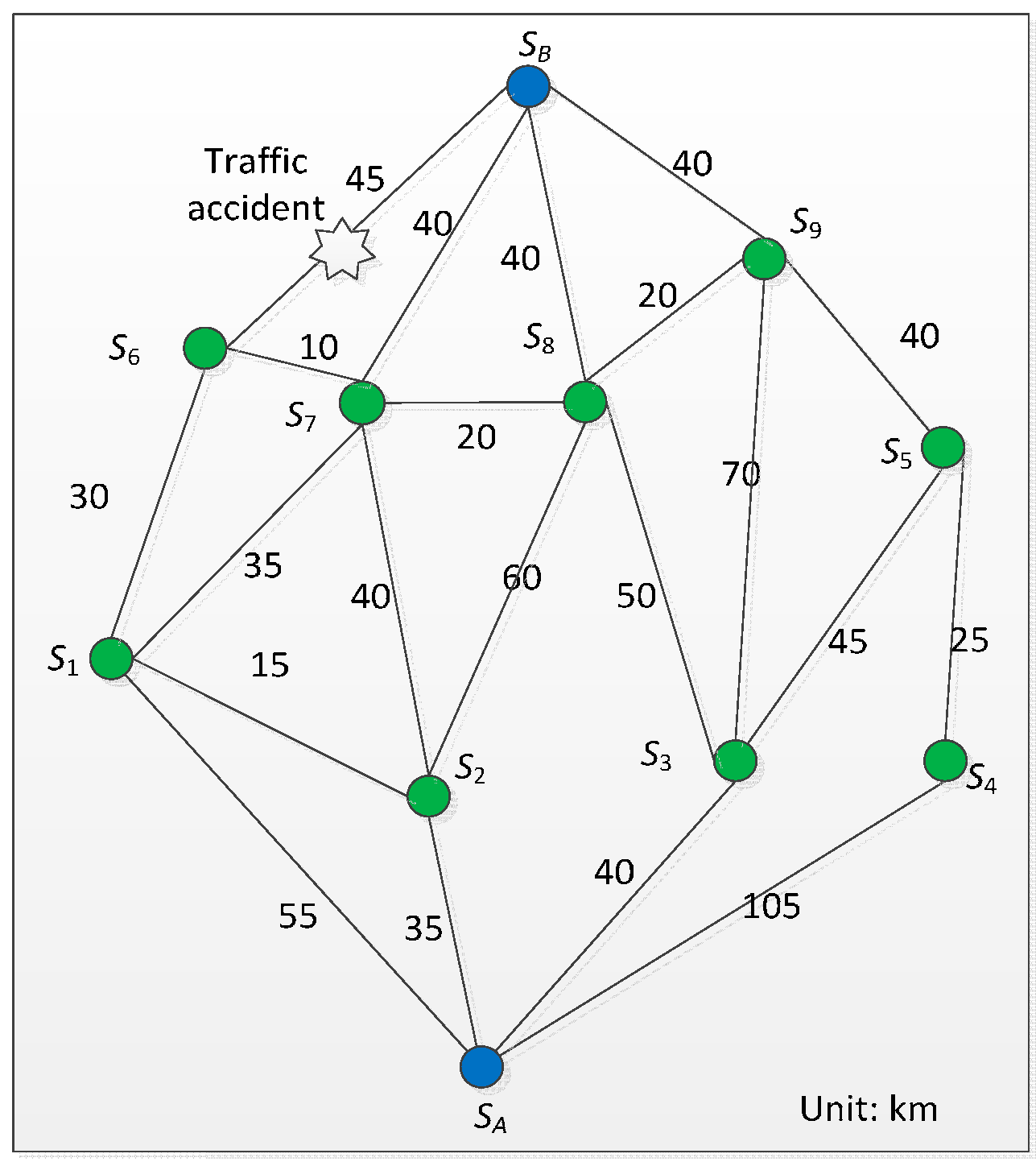
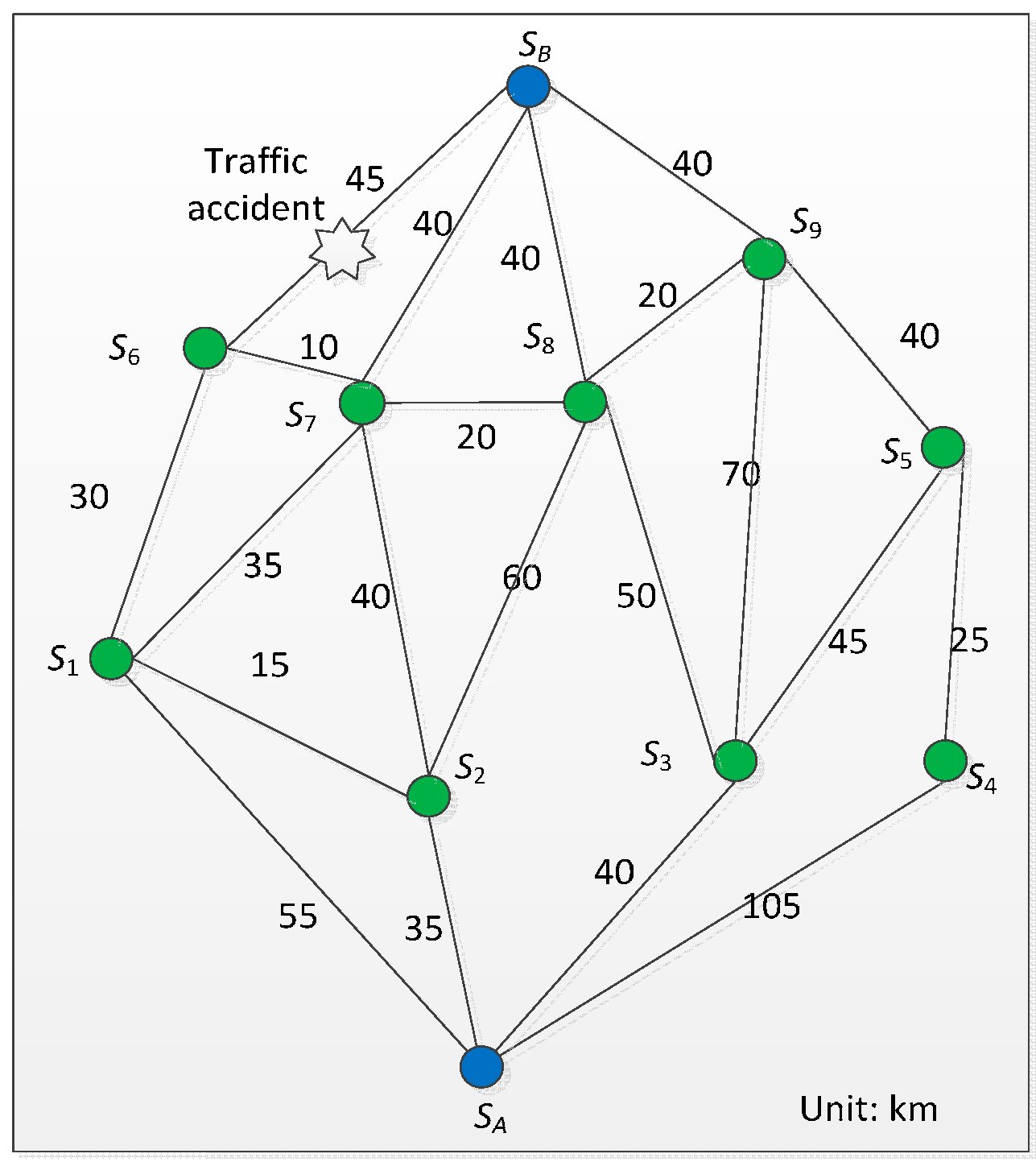
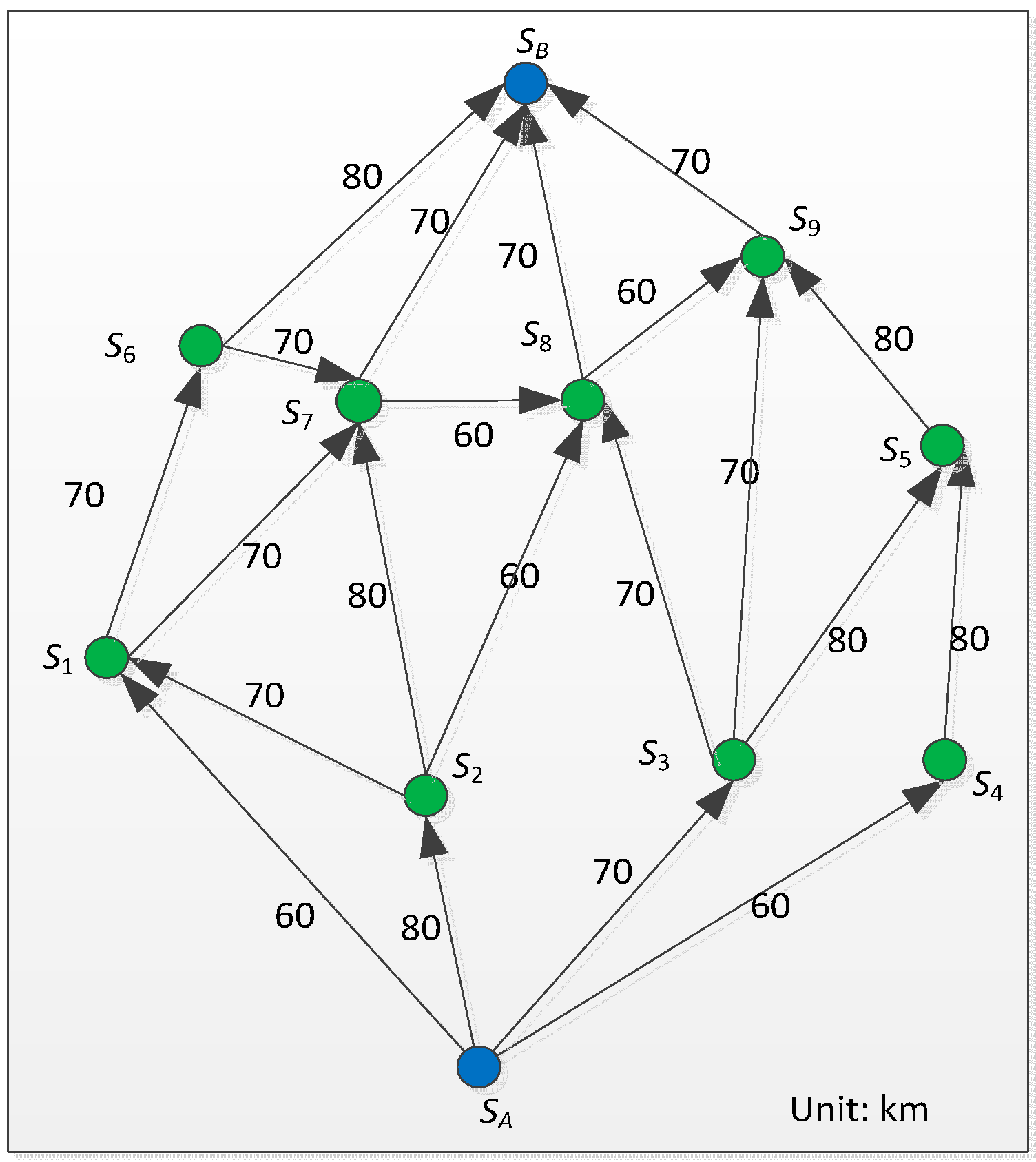
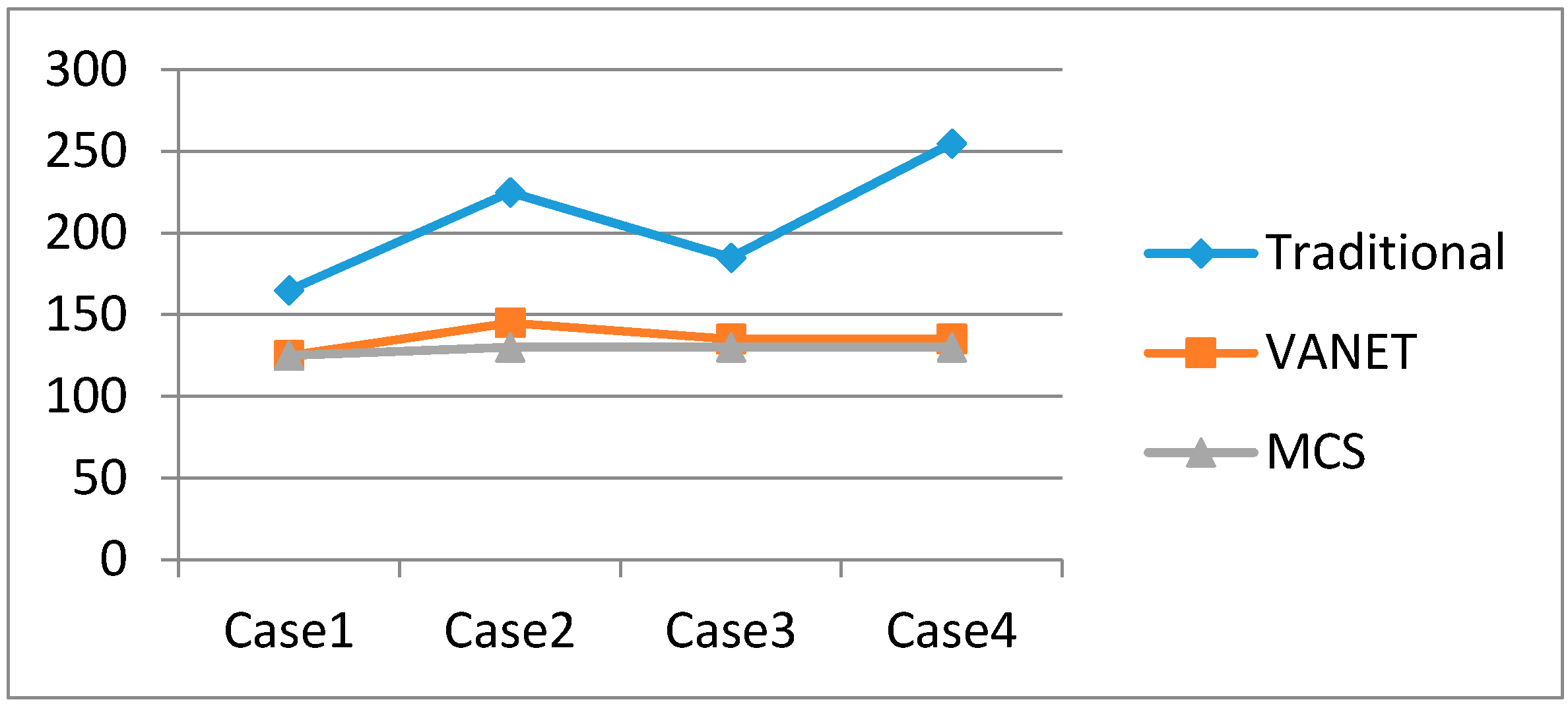
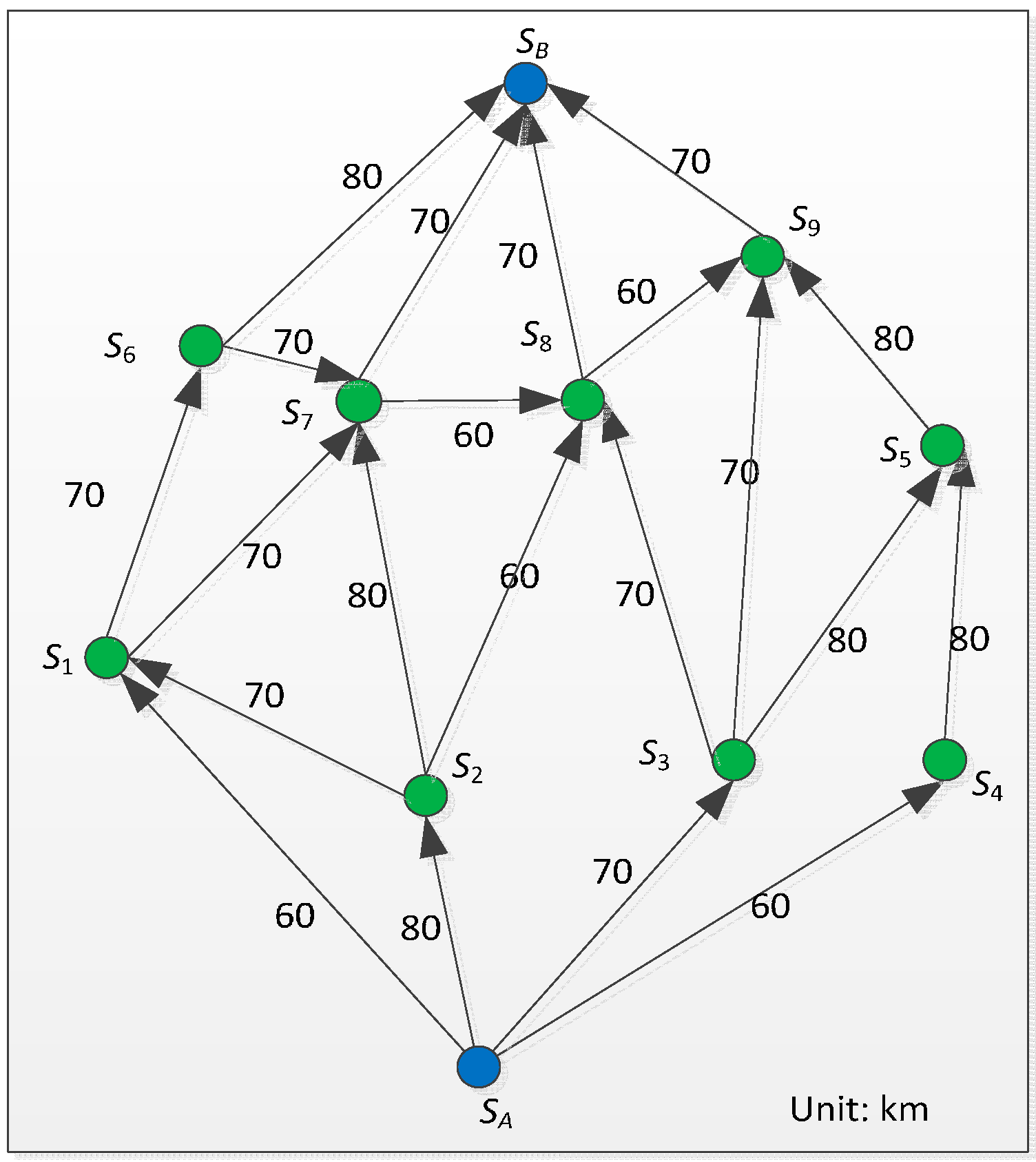
5.1. Simulation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| α | β | Case 1 | Case 2 | Case 3 | Case 4 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Event | Weight | Event | Weight | Event | Weight | Event | Weight | |||
| SA-S1 | 0.5 | 0.8 | 0 | 44 | 0 | 44 | 0 | 44 | 0 | 44 |
| SA-S2 | 0.5 | 0.8 | 0 | 28 | 0 | 28 | 0 | 28 | ∞ | ∞ |
| SA-S3 | 0.5 | 0.8 | 0 | 32 | 0 | 32 | 0 | 32 | ∞ | ∞ |
| SA-S4 | 0.5 | 0.8 | 0 | 84 | 0 | 84 | 0 | 84 | 0 | 84 |
| S1-S6 | 0.5 | 0.8 | 0 | 24 | 0 | 24 | 0 | 24 | 0 | 24 |
| S1-S7 | 0.5 | 0.8 | 0 | 28 | 0 | 28 | 0 | 28 | 0 | 28 |
| S2-S1 | 0.5 | 0.8 | 0 | 12 | 0 | 12 | ∞ | ∞ | 0 | 12 |
| S2-S7 | 0.5 | 0.8 | +∞ | ∞ | ∞ | ∞ | ∞ | ∞ | 0 | 32 |
| S2-S8 | 0.5 | 0.8 | 0 | 48 | 0 | 48 | 0 | 48 | 0 | 48 |
| S3-S8 | 0.5 | 0.8 | 0 | 40 | 0 | 40 | 0 | 40 | 0 | 40 |
| S3-S9 | 0.5 | 0.8 | 0 | 56 | 0 | 56 | 0 | 56 | 0 | 56 |
| S3-S5 | 0.5 | 0.8 | 0 | 36 | 0 | 36 | 0 | 36 | 0 | 36 |
| S4-S5 | 0.5 | 0.8 | 0 | 20 | 0 | 20 | 0 | 20 | 0 | 20 |
| S5-S9 | 0.5 | 0.8 | 0 | 32 | 0 | 32 | 0 | 32 | 0 | 32 |
| S6-SB | 0.5 | 0.8 | 0 | 36 | 0 | 36 | 0 | 36 | ∞ | ∞ |
| S6-S7 | 0.5 | 0.8 | 0 | 8 | 0 | 8 | 0 | 8 | 0 | 8 |
| S7-SB | 0.5 | 0.8 | 0 | 32 | 0 | 32 | 0 | 32 | 0 | 32 |
| S7-SB | 0.5 | 0.8 | 0 | 16 | ∞ | ∞ | 0 | 16 | 0 | 16 |
| S8-SB | 0.5 | 0.8 | 0 | 32 | 0 | 32 | 0 | 32 | 0 | 32 |
| S8-S9 | 0.5 | 0.8 | 0 | 16 | 0 | 16 | 0 | 16 | 0 | 16 |
| S9-SB | 0.5 | 0.8 | 0 | 32 | 0 | 32 | 0 | 32 | 0 | 32 |
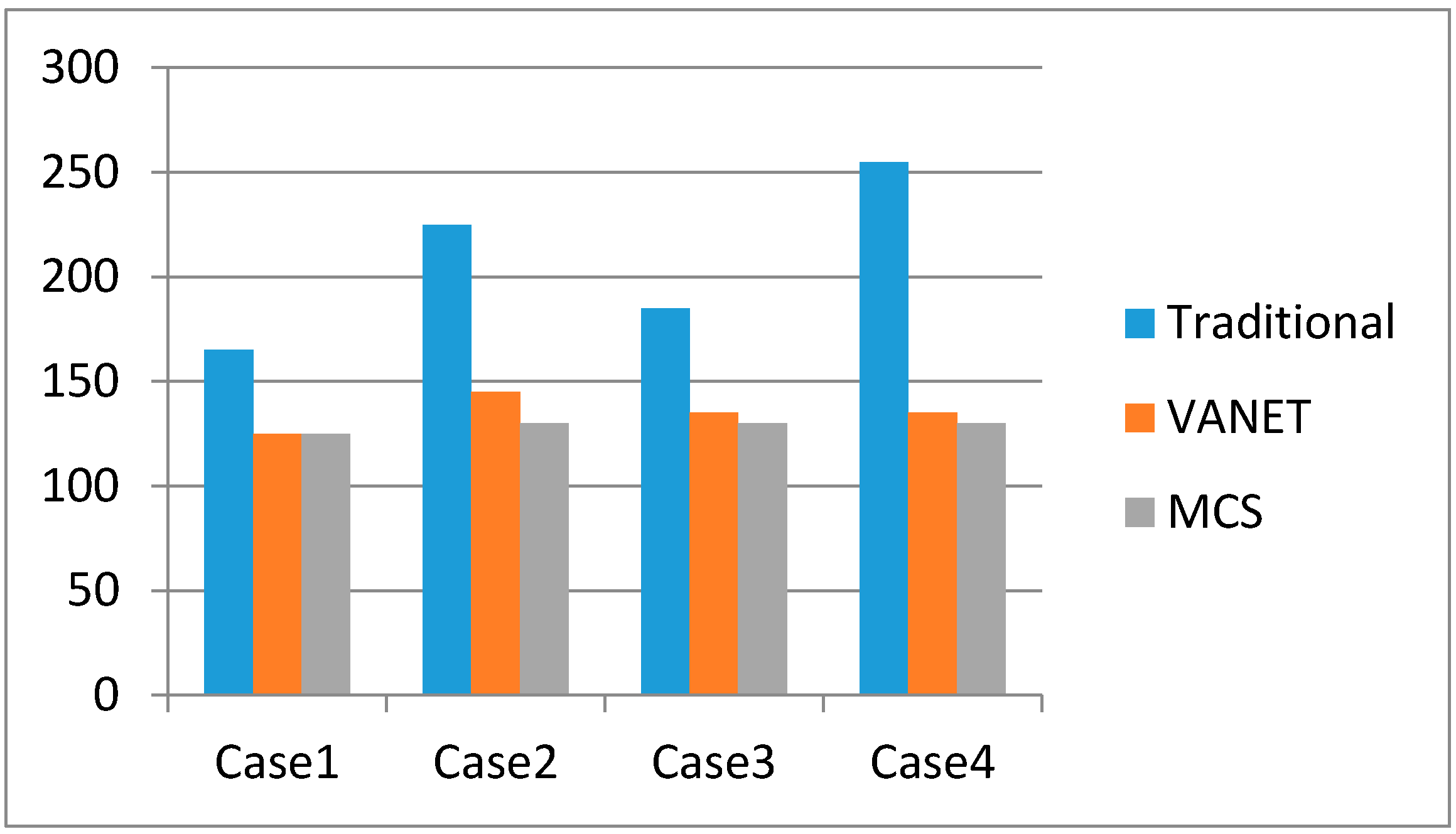
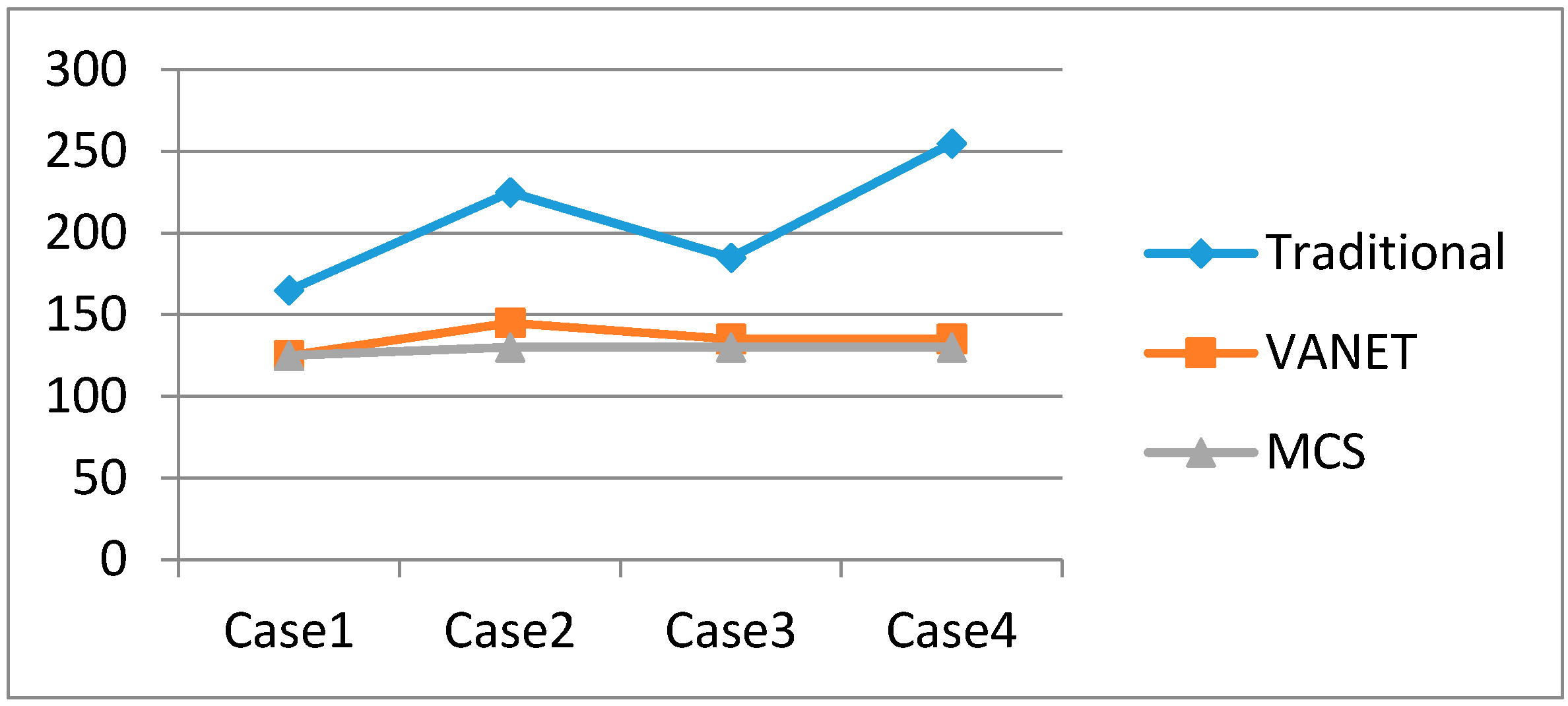
| Case | Accident | Traditional | VANET | MCS |
|---|---|---|---|---|
| Case 1 | S2 ➔ S7 | SA ➔ S2 ➔ AS2-S7 ➔ S2 ➔ S1 ➔ S7 ➔ SB | SA ➔ S2 ➔ S1 ➔ S7 ➔ SB | SA ➔ S2 ➔ S1 ➔ S7 ➔ SB |
| Case 2 | S2 ➔ S7 and S7 ➔ SB | SA ➔ S2 ➔ AS2-S7 ➔ S2 ➔ S1 ➔ S7 ➔ AS7-SB ➔ S7 ➔ S8 ➔ SB | SA ➔ S2 ➔ S1 ➔ S7 ➔ S8 ➔ SB | SA ➔ S3 ➔ S8 ➔ SB |
| Case 3 | S2 ➔ S7 and S2 ➔ S1 | SA ➔ S2 ➔ AS2-S7 ➔ S2 ➔ AS2-S1 ➔ S2 ➔ S8 ➔ SB | SA ➔ S2 ➔ S8 ➔ SB | SA ➔ S3 ➔ S8 ➔ SB |
| Case 4 | SA ➔ S2 and SA ➔ S3 and S6 ➔ SB | SA ➔ ASA-S2 ➔ SA ➔ ASA-S3 ➔ SA ➔ S1 ➔ S6 ➔ AS6-SB ➔ S6 ➔ S7 ➔ SB | SA ➔ S1 ➔ S6 ➔ S7 ➔ SB | SA ➔ S1 ➔ S7 ➔ SB |
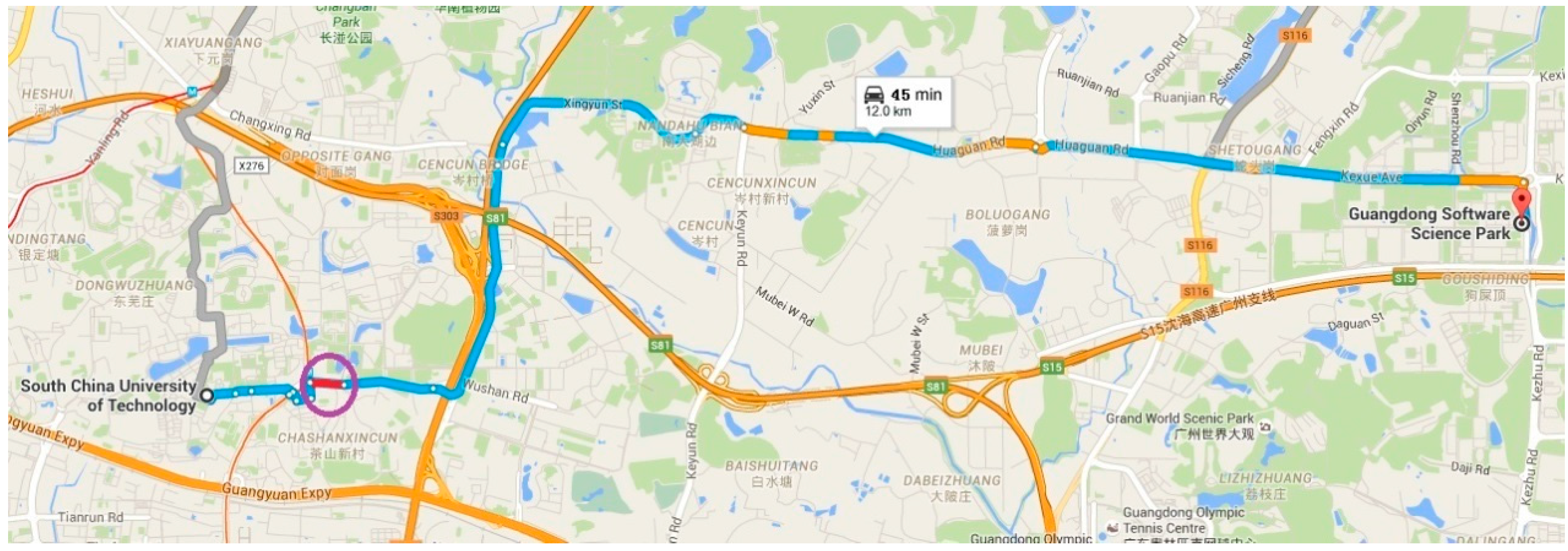
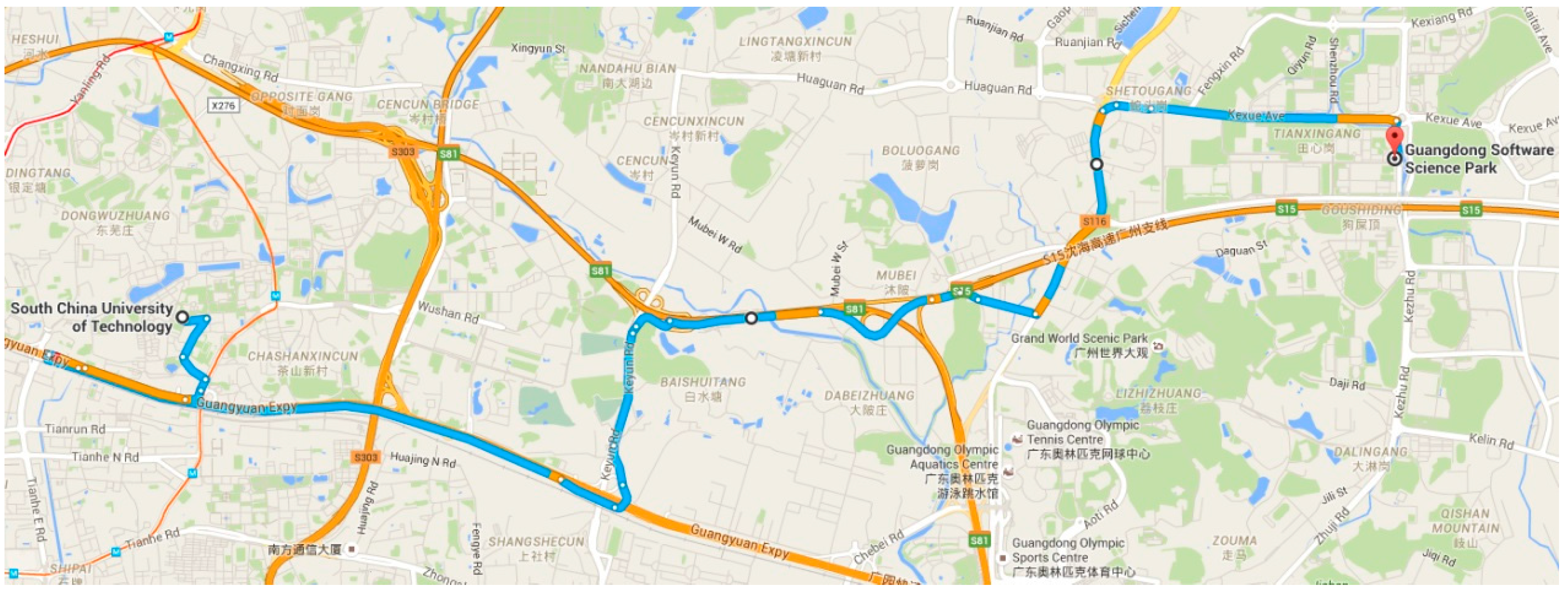
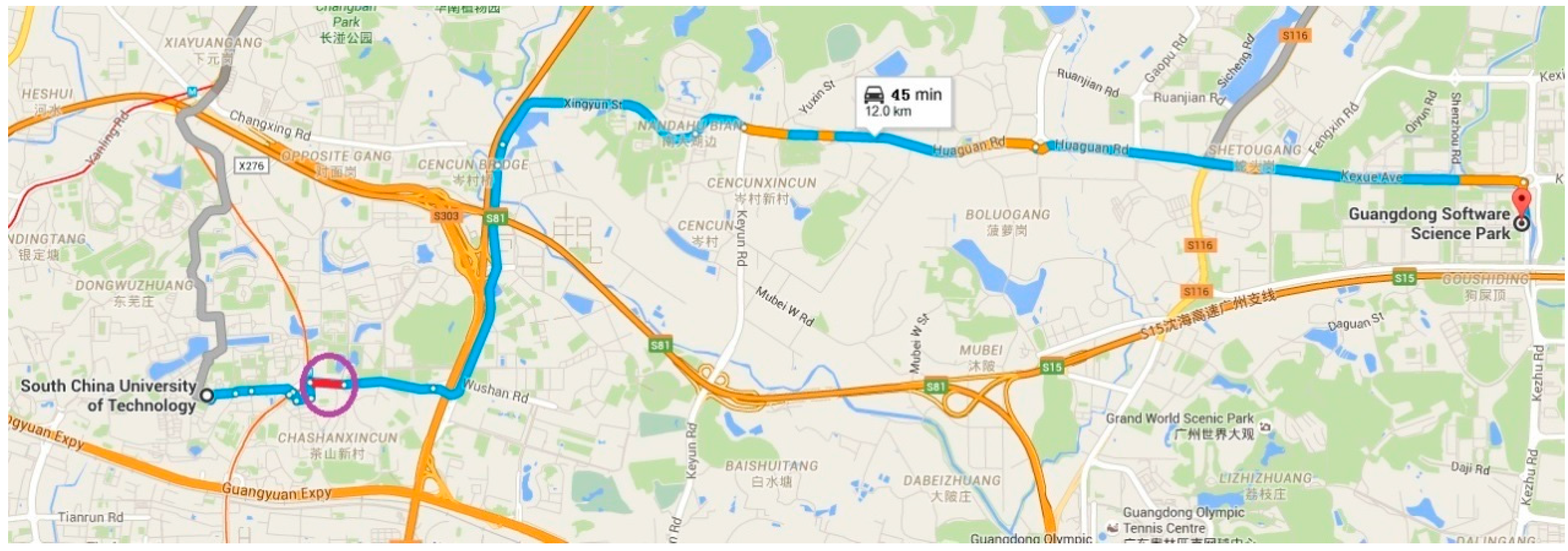
5.2. Experiment
6. Discussion and Outlook
| Methods | Reliability | Service Contents | Interactions | Cloud |
|---|---|---|---|---|
| Travel time aggregation (using loop detectors and road-side cameras) | Low | Limited | V2I | VTC |
| Tensor regression approach (using VANETs) | Medium | Abundant | V2V, V2I | VTC, VAC |
| Mobile crowd sensing technology | High | Very abundant | V2V, V2I, V2H, and V2S | VWC |
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wan, J.; Zou, C.; Zhou, K.; Lu, R.; Li, D. IoT Sensing Framework with Inter-cloud Computing Capability in Vehicular Networking. Electron. Commer. Res. 2014, 14, 389–416. [Google Scholar] [CrossRef]
- Liu, N. Internet of Vehicles: Your Next Connection. Available online: http://www.huawei.com/es/static/HW-110848.pdf (accessed on 20 December 2015).
- Chen, M.; Mau, D.; Zhang, Y.; Taleb, T.; Leung, V. VENDNET: Vehicular Named Data Network. Veh. Commun. 2014, 1, 208–213. [Google Scholar] [CrossRef]
- Wan, J.; Zhang, D.; Sun, Y.; Lin, K.; Zou, C.; Cai, H. VCMIA: A Novel Architecture for Integrating Vehicular Cyber-Physical Systems and Mobile Cloud Computing. Mob. Netw. Appl. 2014, 19, 153–160. [Google Scholar] [CrossRef]
- Liu, J.; Wan, J.; Wang, Q.; Deng, P.; Zhou, K.; Qiao, Y. A Survey on Position-based Routing for Vehicular Ad hoc Networks. Telecommun. Syst. 2015. [Google Scholar] [CrossRef]
- Ganti, R.; Ye, F.; Lei, H. Mobile Crowd Sensing: Current State and Future Challenges. IEEE Commun. Mag. 2011, 49, 32–39. [Google Scholar] [CrossRef]
- Guo, B.; Wang, Z.; Yu, Z.; Wang, Y.; Yen, N.Y.; Huang, R.; Zhou, X. Mobile crowd sensing and computing: The review of an emerging human-powered sensing paradigm. ACM Comput. Surv. (CSUR) 2015, 48. [Google Scholar] [CrossRef]
- Feng, Z.; Zhu, Y.; Zhang, Q.; Ni, L.; Vasilakos, A. TRAC: Truthful auction for location-aware collaborative sensing in mobile crowdsourcing. In Proceedings of the IEEE Infocom 2014, Toronto, ON, Canada, 27 April–2 May 2014.
- Zhang, D.; Zhang, D.; Xiong, H.; Yang, T.; Vasilakos, A. BASA: Building Mobile Ad-hoc Social Network on top of Android. IEEE Netw. 2014, 28, 4–9. [Google Scholar] [CrossRef]
- Lochert, C.; Scheuermann, B.; Wewetzer, C.; Luebke, A.; Mauve, M. Data aggregation and roadside unit placement for a VANET traffic information system. In Proceedings of the 5th ACM International Workshop on Vehicular Inter-NETworking, San Francisco, CA, USA, 14–19 September 2008; pp. 58–65.
- Hartenstein, H.; Laberteaux, K.P. VANET: Vehicular Applications and Inter-Networking Technologies; John Wiley and Sons, Ltd.: New York, NY, USA, 2010. [Google Scholar]
- Min, W.; Wynter, L. Real-time road traffic prediction with spatio-temporal correlations. Transp. Res. Part C 2011, 19, 606–616. [Google Scholar] [CrossRef]
- Wan, J.; Zhang, D.; Zhao, S.; Yang, L.T.; Lloret, J. Context-aware Vehicular Cyber-Physical Systems with Cloud Support: Architecture, Challenges and Solutions. IEEE Commun. Mag. 2014, 52, 106–113. [Google Scholar] [CrossRef]
- Ni, D.; Liu, H.; Ding, W.; Xie, Y.; Wang, H.; Pishro-Nik, H.; Yu, Q. Cyber-physical integration to connect vehicles for transformed transportation safety and efficiency. In Proceedings of the 25th International Conference on Industrial Engineering and Other Applications of Applied Intelligent Systems, Dalian, China, 9–12 June 2012; pp. 88–94.
- Hull, B.; Bychkovsky, V.; Zhang, Y.; Chen, K.; Goraczko, M.; Miu, A.; Shih, E.; Balakrishnan, H.; Madden, S. Cartel: A distributed mobile sensor computing system. In Proceedings of the SenSys 2006, Boulder, CO, USA, 31 October–3 November 2006; pp. 125–138.
- Mohan, P.; Padmanabhan, V.; Ramjee, R. Nericell: Rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the ACM SenSys, Raleigh, NC, USA, 5–7 November 2008; pp. 323–336.
- Herrera, J.; Work, D.; Ban, X.; Herring, R.; Jacobson, Q.; Bayen, A. Evaluation of Traffic Data Obtained via GPS-enabled Mobile Phones: the Mobile Century Field Experiment. Transp. Res. C 2010, 18, 568–583. [Google Scholar] [CrossRef]
- Mathur, S.; Jin, T.; Kasturirangan, N.; Chandrashekharan, J.; Xue, W.; Gruteser, M.; Trappe, W. Parknet: Drive-by sensing of road-side parking statistics. In Proceedings of the ACM MobiSys, San Francisco, CA, USA, 15–18 June 2010; pp. 123–136.
- Ali, K.; Al-Yaseen, D.; Ejaz, A.; Javed, T.; Hassanein, H. CrowdITS: Crowdsourcing in intelligent transportation systems. In Proceedings of the IEEE WCNC 2012, Paris, France, 1–4 April 2012; pp. 3307–3311.
- Nadeem, T.; Dashtinezhad, S.; Liao, C.; Iftode, L. TrafficView: Traffic Data Dissemination using Car-to-car Communication. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2004, 8, 6–19. [Google Scholar] [CrossRef]
- Liu, J.; Wan, J.; Wang, Q.; Zeng, B.; Fang, S. A Time-recordable Cross-Layer Communication Protocol for the Positioning of Vehicular Cyber-Physical Systems. Future Gener. Comput. Syst. 2016, 56, 438–448. [Google Scholar] [CrossRef]
- Liu, J.; Wan, J.; Wang, Q.; Li, D.; Qiao, Y.; Cai, H. A Novel Energy-saving One-Sided Synchronous Two-Way Ranging Algorithm for Vehicular Positioning. Mob. Netw. Appl. 2015, 20, 661–672. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Hussain, R.; Junggab, S.; Hasoo, E.; Sangjin, K.; Heekuck, O. Rethinking vehicular communications: Merging VANET with cloud computing. In Proceedings of the 4th International Conference Cloud Computing Technology and Science, Taipei, Taiwan, 3–6 December 2012; pp. 606–609.
- Yu, R.; Zhang, Y.; Xia, W.; Yang, K. Toward Cloud-Based Vehicular Networks with Efficient Resource Management. IEEE Netw. 2013, 27, 48–55. [Google Scholar]
- Zhang, D.; Chen, M.; Guizani, M.; Xiong, H.; Zhang, D. Mobility Prediction in Telecom Cloud Using Mobile Calls. IEEE Wirel. Commun. 2014, 21, 26–32. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, Y.; Li, Y.; Mao, S.; Leung, V. EMC: Emotion-aware Mobile Cloud Computing in 5G. IEEE Netw. 2015, 29, 32–38. [Google Scholar]
- Chen, M.; Hao, Y.; Li, Y.; Lai, C.; Wu, D. On The Computation Offloading at Ad Hoc Cloudlet: Architecture and Service Models. IEEE Commun. Mag. 2015, 53, 18–24. [Google Scholar]
- Jiau, M.K.; Huang, S.C.; Hwang, J.N.; Vasilakos, A. V. Multimedia services in cloud-based vehicular networks. IEEE Intell. Transp. Syst. Mag. 2015, 7, 62–79. [Google Scholar] [CrossRef]
- Cormen, T.; Leiserson, C.; Ronald, L. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Fredman, M.; Tarjan, R. Fibonacci heaps and their uses in improved network optimization algorithms. J. Assoc. Comput. Mach. 1987, 34, 596–615. [Google Scholar] [CrossRef]
- Xiong, N.; Vasilakos, A.V.; Yang, L.T.; Song, L.; Pan, Y.; Kannan, R.; Li, Y. Comparative analysis of quality of service and memory usage for adaptive failure detectors in healthcare systems. IEEE J. Sel. Areas Commun. 2009, 27, 495–509. [Google Scholar] [CrossRef]
- Xiong, N.; Vasilakos, A.V.; Yang, L.T.; Wang, C.X.; Kannan, R.; Chang, C.C.; Pan, Y. A novel self-tuning feedback controller for active queue management supporting TCP flows. Inf. Sci. 2010, 180, 2249–2263. [Google Scholar] [CrossRef]
- Shu, Z.; Wan, J.; Zhang, D.; Li, D. Cloud-integrated Cyber-Physical Systems for Complex Industrial Applications. Mob. Netw. Appl. 2015. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, J.; Liu, J.; Shao, Z.; Vasilakos, A.V.; Imran, M.; Zhou, K. Mobile Crowd Sensing for Traffic Prediction in Internet of Vehicles. Sensors 2016, 16, 88. https://doi.org/10.3390/s16010088
Wan J, Liu J, Shao Z, Vasilakos AV, Imran M, Zhou K. Mobile Crowd Sensing for Traffic Prediction in Internet of Vehicles. Sensors. 2016; 16(1):88. https://doi.org/10.3390/s16010088
Chicago/Turabian StyleWan, Jiafu, Jianqi Liu, Zehui Shao, Athanasios V. Vasilakos, Muhammad Imran, and Keliang Zhou. 2016. "Mobile Crowd Sensing for Traffic Prediction in Internet of Vehicles" Sensors 16, no. 1: 88. https://doi.org/10.3390/s16010088
APA StyleWan, J., Liu, J., Shao, Z., Vasilakos, A. V., Imran, M., & Zhou, K. (2016). Mobile Crowd Sensing for Traffic Prediction in Internet of Vehicles. Sensors, 16(1), 88. https://doi.org/10.3390/s16010088